Analytical Measurements and Efficient Process Generation Using a Dual–Arm Robot Equipped with Electronic Pipettes

 ,
,
Abstract
:1. Introduction
2. Manual and Automated Liquid Handling
2.1. Overview
2.2. Drawback of Manual Pipetting
2.3. Approaches in Automated Liquid Handling
3. System Concept and System Design
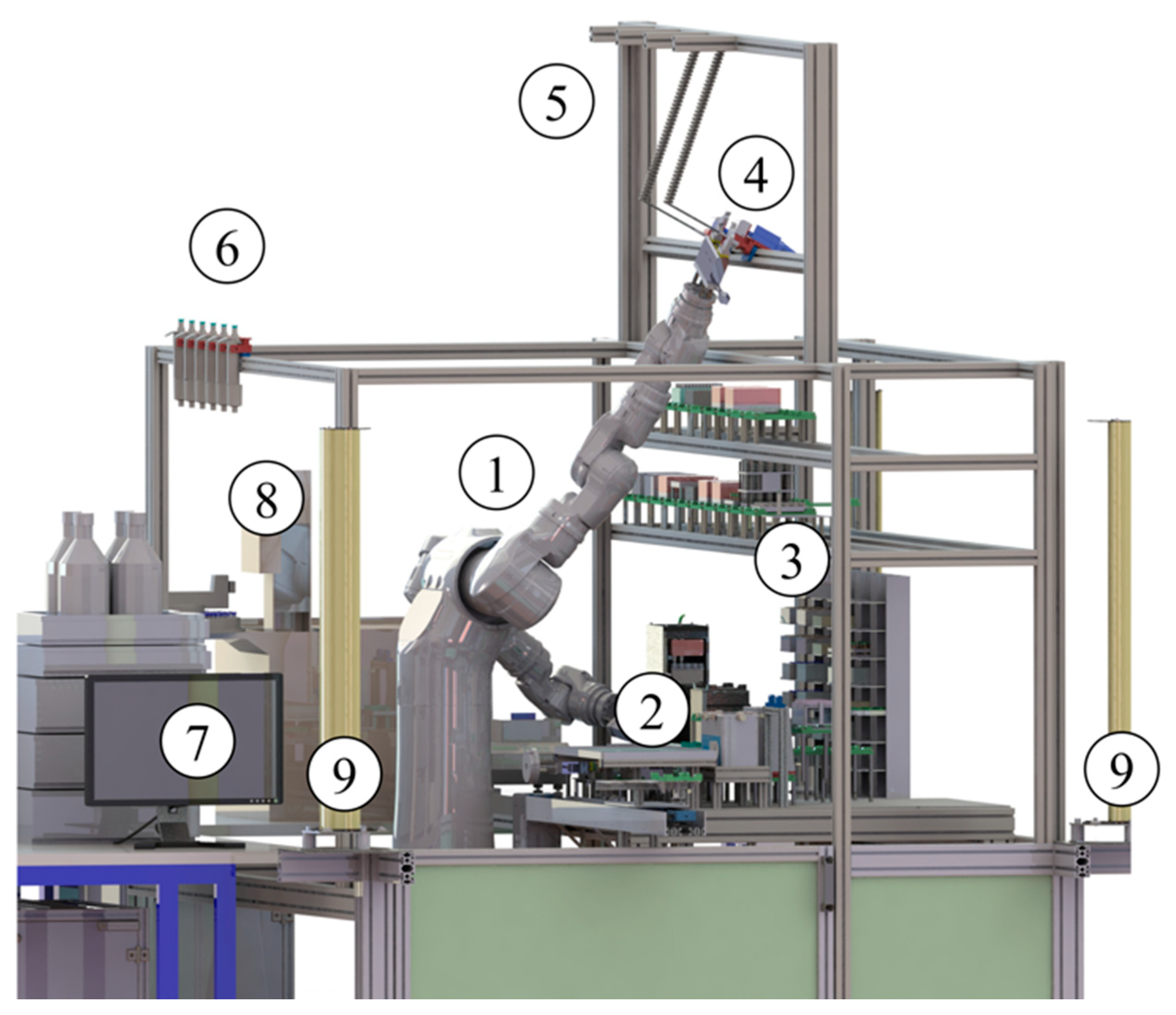
3.1. System Overview
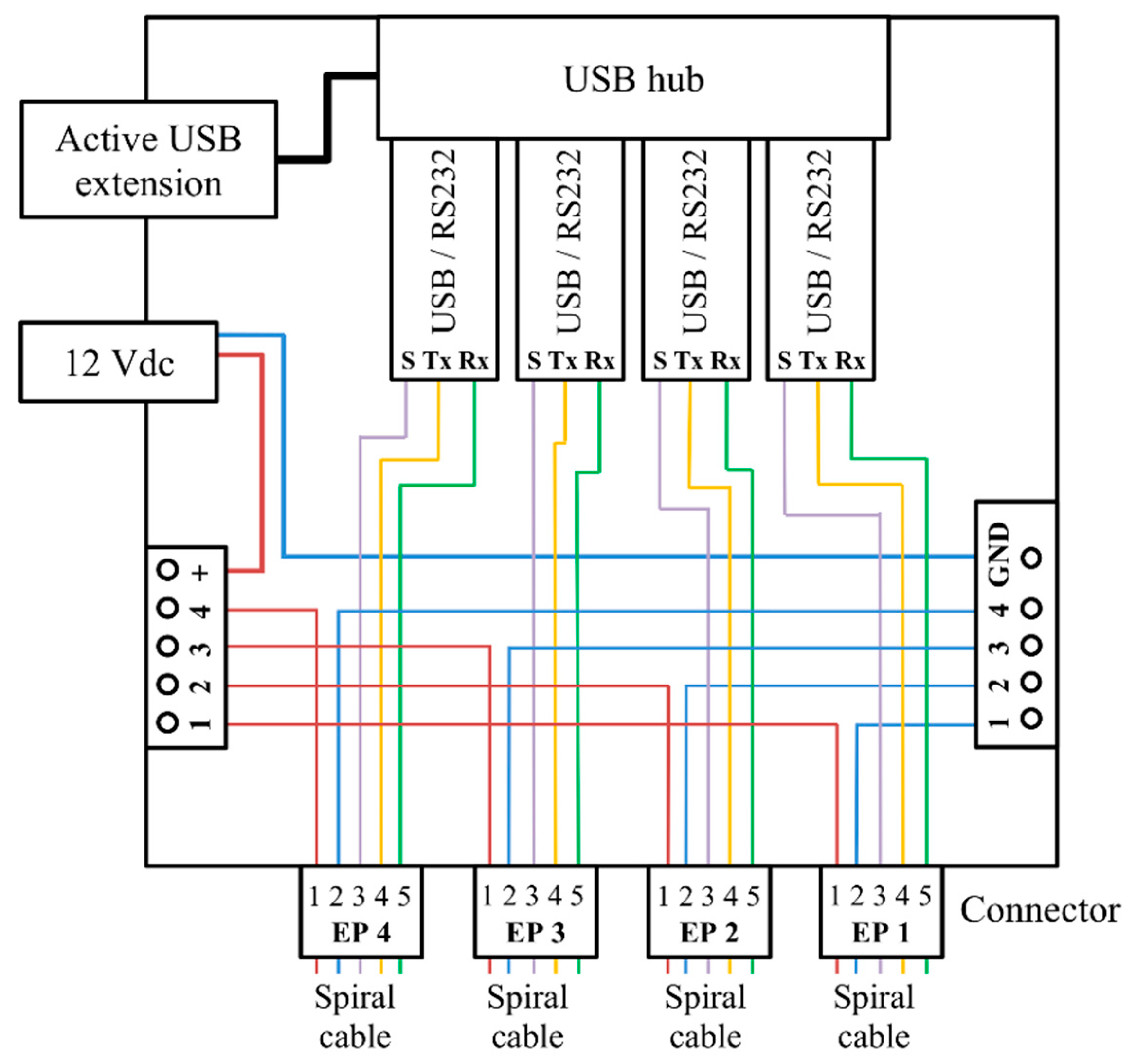
3.2. Hardware Design
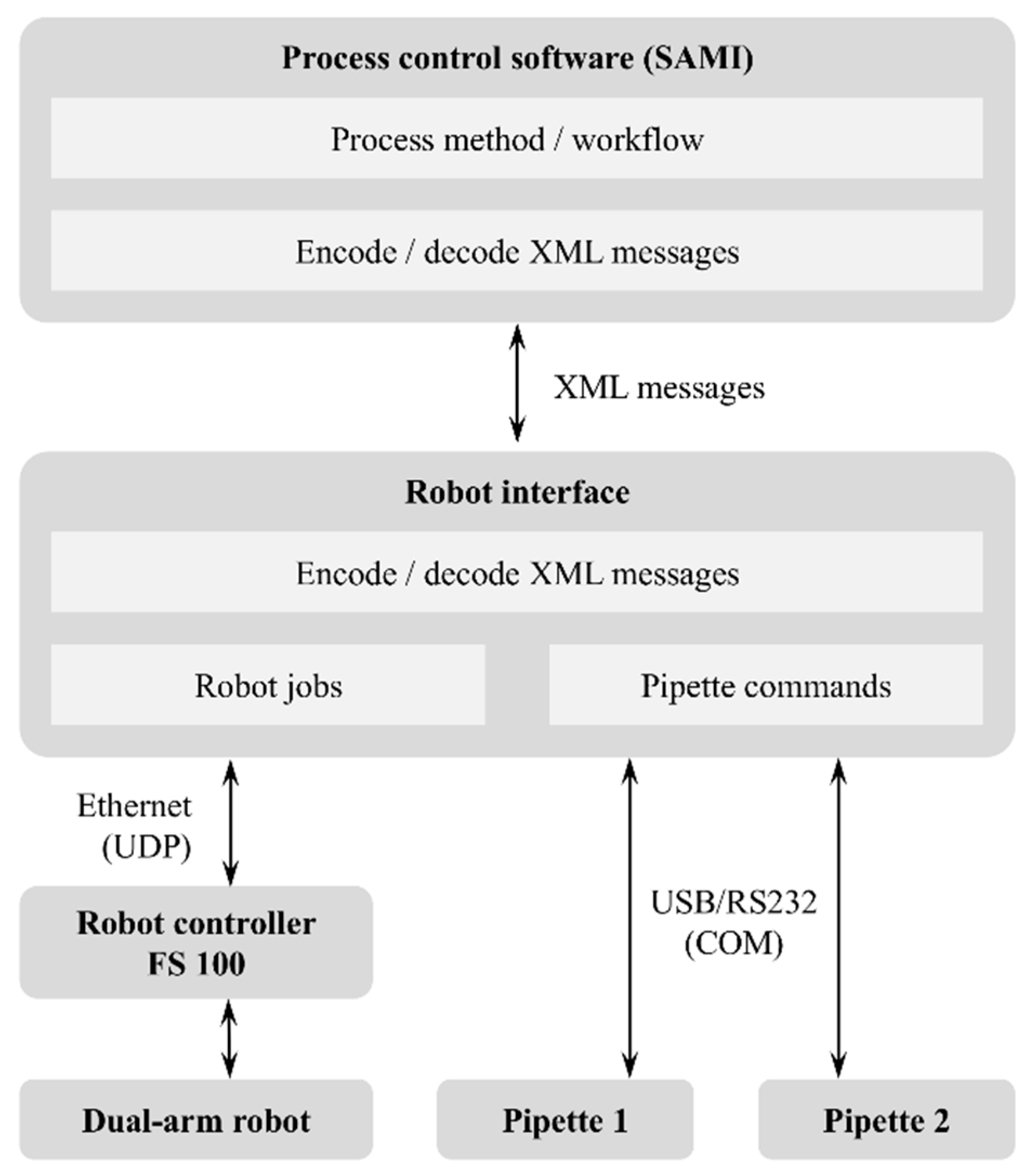
3.3. Software Design
4. Pipette Control
4.1. Communication Protocol
4.2. Pipette Commands
4.3. Queries
4.4. Communication Testing
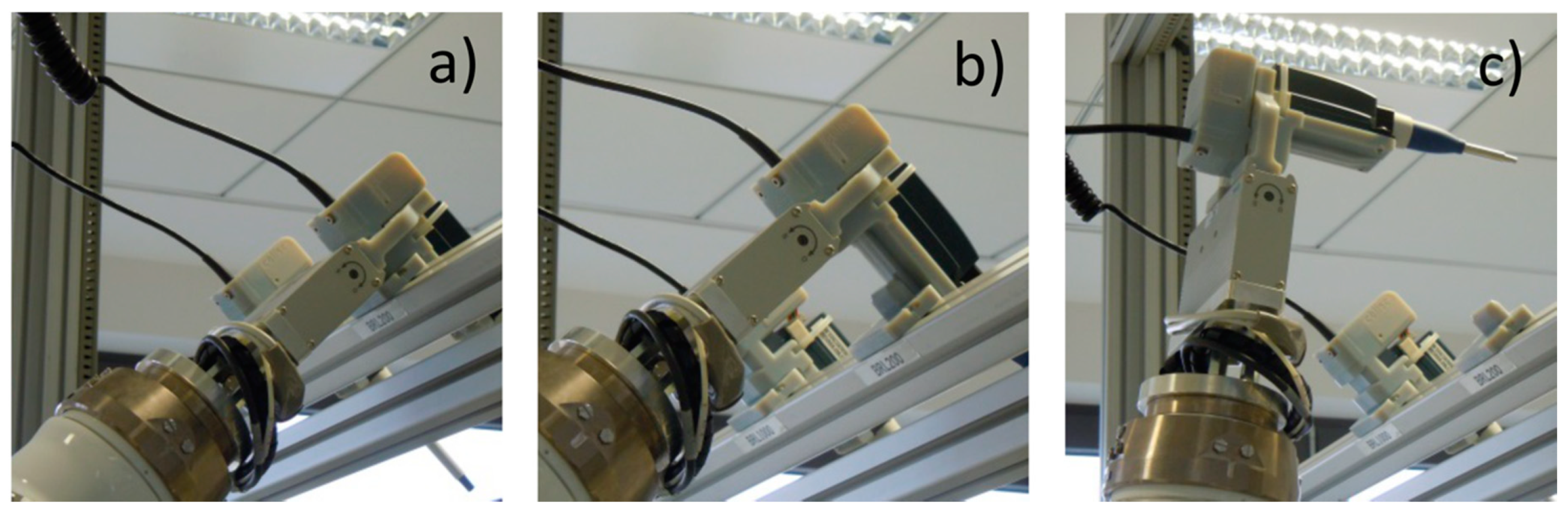
5. Robot Jobs for Pipette Handling
5.1. Robot Jobs
5.2. Merging of Robot Jobs and Pipette Commands
6. High–Level Process Control
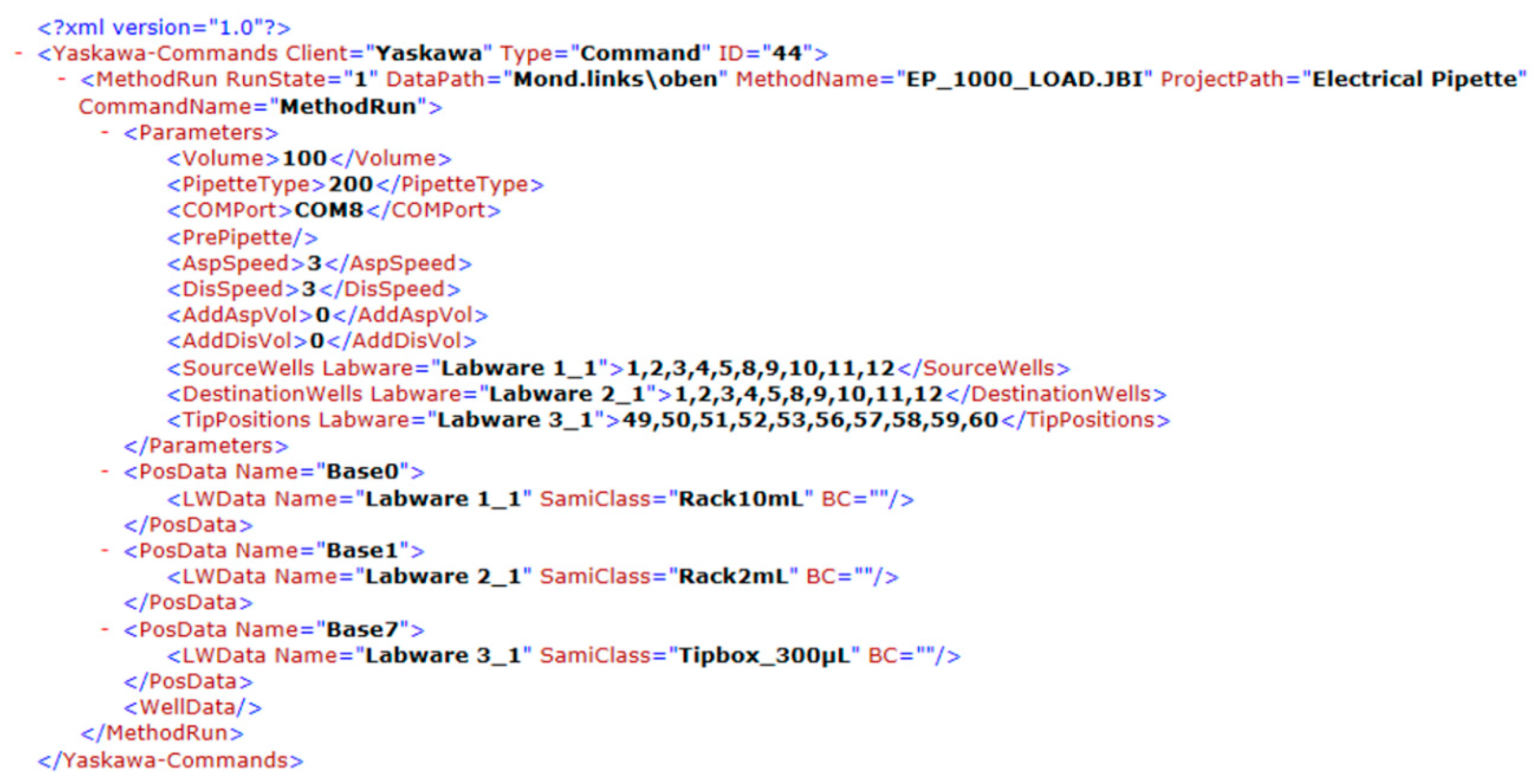
Parameter Transfer Using XML
7. Results and Discussion
7.1. Pipetting a Volume of 100 µL
7.2. Pipetting a Volume of 1300 µL
7.2.1. Process Using Manual Pipettes
7.2.2. Process Using Electronic Pipettes
7.3. Process Comparison Using Manual and Electronic Pipettes
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kong, F.; Yuan, L.; Zheng, Y.F.; Chen, W. Automatic liquid handling for life science: A critical review of the current state of the art. J. Lab. Autom. 2012, 17, 169–185. [Google Scholar] [CrossRef] [PubMed]
- Bogue, R. Robots in the laboratory: A review of applications. Ind. Robot 2012, 39, 113–119. [Google Scholar] [CrossRef]
- Moore, K.W.; Newman, R.; Chan, G.K.Y.; Leech, C.; Allison, K.; Coulson, J.; Simpson, P.B. Implementation of a High Specification Dual-Arm Robotic Platform to Meet Flexible Screening Needs. J. Assoc. Lab. Autom. 2007, 12, 115–123. [Google Scholar] [CrossRef]
- Fleischer, H.; Thurow, K. Automation Solutions for Analytical Measurements: Concepts and Applications; Wiley-VCH: Weinheim, Germany, 2017; ISBN 3-527-34217-6. [Google Scholar]
- Smith, C.; Karayiannidis, Y.; Nalpantidis, L.; Gratal, X.; Qi, P.; Dimarogonas, D.V.; Kragic, D. Dual arm manipulation—A survey. Robot. Autom. Syst. 2012, 60, 1340–1353. [Google Scholar] [CrossRef] [Green Version]
- Ambrose, R.O.; Aldridge, H.; Askew, R.S.; Burridge, R.R.; Bluethmann, W.; Diftler, M.; Lovchik, C.; Magruder, D.; Rehnmark, F. Robonaut: NASA’s space humanoid. IEEE Intell. Syst. Appl. 2000, 15, 57–62. [Google Scholar] [CrossRef]
- Ott, C.; Eiberger, O.; Friedl, W.; Bäuml, B.; Hillenbrand, U.; Borst, C.; Albu-Schäffer, A.; Brunner, B.; Hirschmüller, H.; Kielhöfer, S.; et al. A humanoid two-arm system for dexterous manipulation. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots (HUMANOIDS), Genova, Italy, 4–6 December 2006; pp. 276–283. [Google Scholar] [CrossRef]
- Borst, C.; Ott, C.; Wimböck, T.; Brunner, B.; Zacharias, F.; Bäuml, B.; Hillenbrand, U.; Haddadin, S.; Albu-Schäffer, A.; Hirzinger, G. A humanoid upper body system for two-handed manipulation. In Proceedings of the IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 2766–2767. [Google Scholar] [CrossRef]
- Ren, Y.; Liu, Y.; Jin, M.; Liu, H. Biomimetic object impedance control for dual-arm cooperative 7-DOF manipulators. Robot. Autom. Syst. 2016, 75, 273–287. [Google Scholar] [CrossRef] [Green Version]
- Fleischer, H.; Drews, R.R.; Janson, J.; Chinna Patlolla, B.R.; Chu, X.; Klos, M.; Thurow, K. Application of a Dual-Arm Robot in Complex Sample Preparation and Measurement Processes. J. Lab. Autom. 2016, 21, 671–681. [Google Scholar] [CrossRef] [PubMed]
- Chu, X.; Roddelkopf, T.; Fleischer, H.; Stoll, N.; Klos, M.; Thurow, K. Flexible robot platform for sample preparation automation with a user-friendly interface. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; pp. 2033–2038. [Google Scholar] [CrossRef]
- Chu, X.; Fleischer, H.; Klos, M.; Stoll, N.; Thurow, K. Application of Dual-arm Robot in Biomedical Analysis: Sample Preparation and Transport. In Proceedings of the IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Pisa, Italy, 11–14 May 2015; pp. 500–504. [Google Scholar] [CrossRef]
- Chu, X.; Fleischer, H.; Roddelkopf, T.; Stoll, N.; Klos, M.; Thurow, K. Automated sample preparation using a dual-arm robotic platform. Am. Lab. 2016, 48, 44–45. [Google Scholar]
- Fleischer, H.; Baumann, D.; Chu, X.; Roddelkopf, T.; Klos, M.; Thurow, K. Integration of Electronic Pipettes into a Dual-arm Robotic System for Automated Analytical Measurement Processes. In Proceedings of the IEEE International Conference on Automation Science and Engineering (CASE), Munich, Germany, 20–24 August 2018; pp. 22–27. [Google Scholar]
- Fleischer, H.; Vorberg, E.; Warkentin, M.; Behrend, D.; Thurow, K. Determination of Calcium and Phosphor in Bones Using Microwave Digestion and ICP-MS: Comparison of Manual and Automated Methods using ICP-MS. In Proceedings of the 5th IMEKO TC19 Symposium on Environmental Instrumentation and Measurement, Chemnitz, Germany, 23–24 September 2014; pp. 94–99. [Google Scholar]
- Fleischer, H.; Vorberg, E.; Thurow, K. Determination of Total Mercury Content in Wood Materials—Part 3: Miniaturization Using ICP-MS. Am. Lab. 2014, 46, 16–20. [Google Scholar]
- Vorberg, E.; Thurow, K.; Fleischer, H.; Junginger, S.; Stoll, N. Automated Sample Preparation for Mercury Analysis in Wood Materials. In Proceedings of the 5th IMEKO TC19 Symposium on Environmental Instrumentation and Measurement, Chemnitz, Germany, 23–24 September 2014; pp. 66–70. [Google Scholar]
- Vorberg, E.; Fleischer, H.; Junginger, S.; Stoll, N.; Thurow, K. Automated Sample Preparation for Mercury Analysis in Wood Materials. IET Sci. Meas. Technol. 2016, 10, 398–404. [Google Scholar] [CrossRef]
- Vorberg, E.; Fleischer, H.; Junginger, S.; Liu, H.; Stoll, N.; Thurow, K. A Highly Flexible, Automated System Providing Reliable Sample Preparation in Element- and Structure-Specific Measurements. J. Lab. Autom. 2016, 21, 682–692. [Google Scholar] [CrossRef] [PubMed]
- Fleischer, H.; Ramani, K.; Blitti, K.; Warkentin, M.; Behrend, D.; Thurow, K. Flexible Automation System for Determination of Elemental Composition of Incrustations in Clogged Biliary Endoprostheses Using ICP-MS. SLAS Technol. 2018, 23, 83–96. [Google Scholar] [CrossRef] [PubMed]
- Riddle, P. The use and maintenance of liquid-handling devices. Biomed. Sci. 2013, 2013, 138–141. [Google Scholar]
- Ainla, A.; Gözen, I.; Orwar, O.; Jesorka, A. A microfluidic diluter based on pulse width flow modulation. Anal. Chem. 2009, 81, 5549–5556. [Google Scholar] [CrossRef] [PubMed]
- Do, V.Q.; Fleischer, H.; Hoffmann, D.; Thurow, K. Integration of a dilution module in a mass spectrometry-based online reaction monitoring system. Am. Lab. 2017, 49, 36–40. [Google Scholar]
- Do, V.Q.; Fleischer, H.; Thurow, K. Online Dilution for Elemental Measurements Using an Online Reaction Monitoring System and Inductively-Coupled Plasma Mass Spectrometry. In Proceedings of the IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Houston, TX, USA, 14–17 May 2018; pp. 1625–1630. [Google Scholar] [CrossRef]
- Wu, J.Z.; Sinsel, E.W.; Shroyer, J.F.; Warren, C.M.; Welcome, D.E.; Zhao, K.D.; An, K.N.; Buczek, F.L. Analysis of the musculoskeletal loading of the thumb during pipetting—A pilot study. J. Biomech. 2014, 47, 392–399. [Google Scholar] [CrossRef] [PubMed]
- Fredriksson, K. Laboratory work with automatic pipettes: A study on how pipetting affects the thumb. Ergonomics 1995, 38, 1067–1073. [Google Scholar] [CrossRef] [PubMed]
- David, G.; Buckle, P. A questionnaire survey of the ergonomie problems associated with pipettes and their usage with specific reference to work-related upper limb disorders. Appl. Ergon. 1997, 28, 257–262. [Google Scholar] [CrossRef]
- Reed, C.E.; Fournier, J.; Vamvoukas, N.; Koza, S.M. Automated Preparation of MS-Sensitive Fluorescently Labeled N-Glycans with a Commercial Pipetting Robot. SLAS Technol. 2018. [Google Scholar] [CrossRef] [PubMed]
- Chu, X.; Fleischer, H.; Roddelkopf, T.; Stoll, N.; Klos, M.; Thurow, K. A LC-MS integration approach in life science automation: Hardware integration and software integration. In Proceedings of the IEEE International Conference on Automation Science and Engineering (CASE), Gothenburg, Sweden, 24–28 August 2015; pp. 979–984. [Google Scholar] [CrossRef]
- Schmid, F.F.; Schwarz, T.; Klos, M.; Schuberthan, W.; Walles, H.; Hansmann, J.; Groeber, F.K. Applicability of a Dual-Arm Robotic System for Automated Downstream Analysis of Epidermal Models. Appl. Toxicol. 2016, 2, 118–125. [Google Scholar] [CrossRef] [Green Version]
- rLine Technical Manual-rLine 200/1 LS; Sartorius Biohit Liquid Handling Oy: Helsinki, Finland, 2013.
- rLine Technical Manual-rLine 1000/1 LS; Sartorius Biohit Liquid Handling Oy: Helsinki, Finland, 2013.
- Chu, X.; Fleischer, H.; Klos, M.; Thurow, K. Efficient Application of Dual-Arm Robots in Analytical Measurements Using Motion Frames. In Proceedings of the IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Houston, TX, USA, 14–17 May 2018; pp. 290–295. [Google Scholar] [CrossRef]
- Joshi, S.; Chu, X.; Ramani, K.; Thurow, K.; Fleischer, H. Application of a dual arm robot for automated sample preparation for cholesterol determination in biliary stent incrustations. In Proceedings of the IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Houston, TX, USA, 14–17 May 2018; pp. 290–295. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Message Component | Functionality |
|---|---|
| <SOH> | Preamble byte: Start of header character as wake–up call |
| <ADR> | Address byte: Contains the pipette address |
| <CODE> | Definition of message type (command or query) |
| <DATA> | Optional message part for data transfer (e.g., position, status etc.) |
| <LRC> | Longitudinal redundancy check: Recognition of 1–bit errors during message transmission |
| <POST> | Postamble byte: Indication of message end |
| Byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|---|---|
| Message component | SOH | ADR | CODE | CODE | DATA | DATA | DATA | LRC | POST |
| Example | ‘\×01’ | ‘1’ | ‘R’ | ‘P’ | ‘2’ | ‘3’ | ‘4’ | ‘0×80’ | ‘0×0d’ |
| Command | Pipetting Action |
|---|---|
| Selection of move–in speed | Selection of aspiration speed |
| Selection of move–out speed | Selection of dispensing speed |
| Stepwise move–in from current position | Aspirate liquid with defined volume |
| Stepwise move–out from current position | Dispense liquid with defined volume |
| Tip drop and move to end position 0 | Tip drop |
| Tip drop and move to desired position | Tip drop |
| Motion | Task | Method | Parameters |
|---|---|---|---|
| 1 | Pick–up the pipette | Teach–in | - |
| 2 | Load tip | Calculation | Tip position in tip–box: X(B043); Y(B044) |
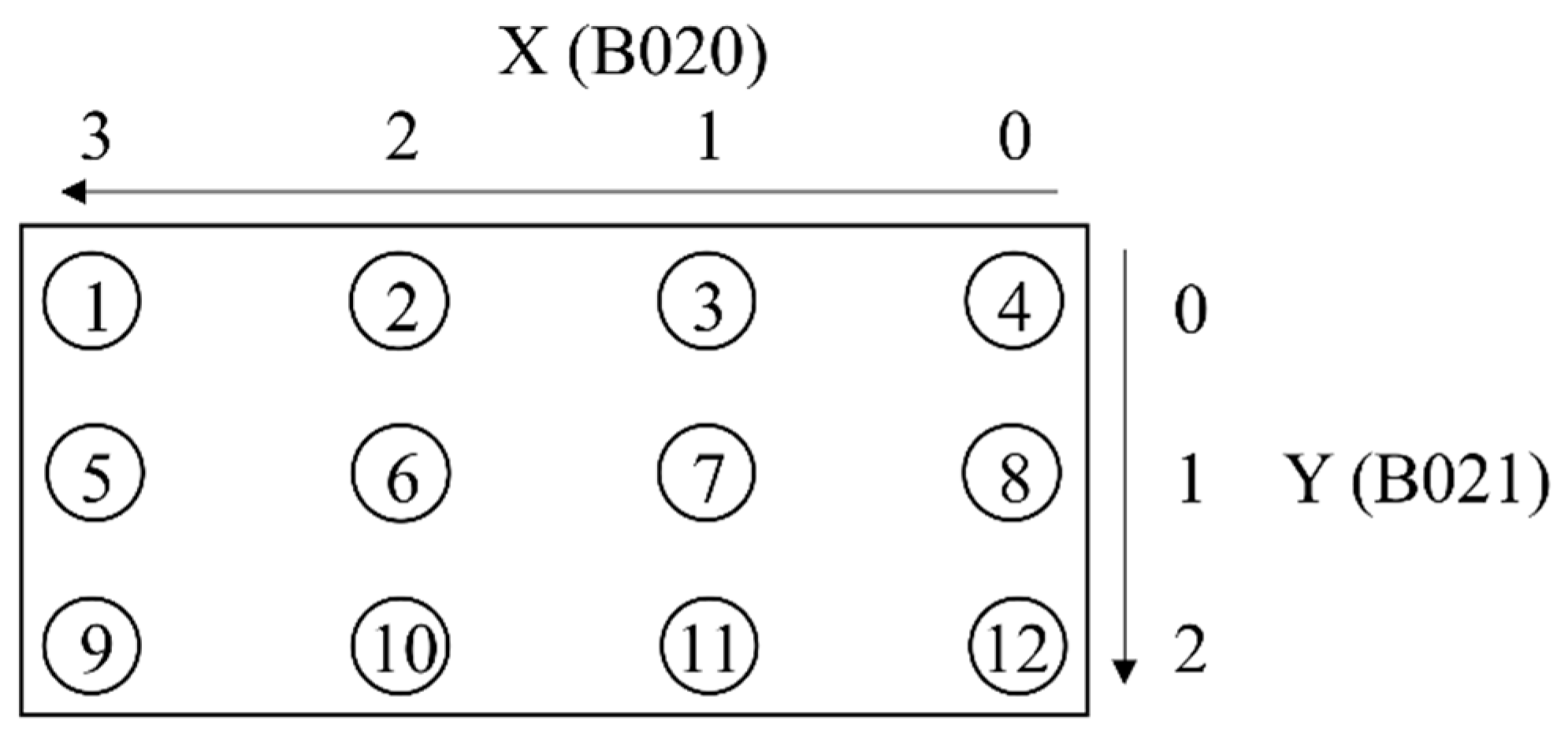
| 3 | Move pipette into vessel | Calculation | Vessel type; Vessel position in Rack: X(B020), Y(B021); speed |
| 4 | Move pipette out vessel | Calculation | Vessel type; speed |
| 5 | Tip eject to garbage | Teach–in | - |
| 6 | Place pipette | Teach–in | - |
| No. | Task | Robot Job | Pipetting Command |
|---|---|---|---|
| 1 | Pick–up pipette | EP_XXX_PICKUP | Pipette initialization |
| 2 | Load tip | EP_XXX_LOAD | Move piston to home position |
| 3 | Move to source labware | EP_XXX_INTO_VIAL EP_XXX_OUT_VIAL | Liquid aspiration and/or liquid dispensing |
| 4 | Move to destination labware | EP_XXX_INTO_VIAL EP_XXX_OUT_VIAL | Liquid aspiration and/or liquid dispensing |
| 5 | Positioning for tip eject | EP_XXX_TIPEJECT | Eject tip |
| 6 | Positioning for safe starting position | EP_XXX_RELOAD | - |
| 7 | Place pipette | EP_XXX_PUTBACK | - |
| Byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | … | … | n | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Message component | Message length (first 4 bytes not included) | DATA | ||||||||||||||||||||
| Example | 00 | 00 | 02 | FA | < | ? | x | m | l | v | e | r | … | o | m | m | a | n | d | s | > | |
| Manual Pipette | Electronic Pipette | ||
|---|---|---|---|
| Number of pipettes | 1 | 1 | |
| Expected volume [µL] | 100 | 100 | |
| Volume pipetted [µL] n = 12 | Average [µL] | 97.07 | 95.42 |
| STDEV [µL] | 1.40 | 3.62 | |
| CV [%] | 1.44 | 3.79 |
| Manual Pipette | Electronic Pipette | ||
|---|---|---|---|
| Number of pipettes | 3 | 1 | |
| Expected volume [µL] | 100/200/1000 | 1000 | |
| Volume pipetted [µL] n = 12 | Average [µL] | 1276.50 | 1284.17 |
| STDEV [µL] | 6.88 | 5.78 | |
| CV [%] | 0.54 | 0.45 |
| Manual Pipette | Electronic Pipette | |
|---|---|---|
| Number of robotic arms involved | 2 | 1 |
| Number of pipettes | 3 | 1 |
| Number of tip boxes | 2 | 1 |
| Number of pipetting steps to pipet a volume of 1300 µL | 3 (1000 µL + 200 µL + 100 µL) | 2 (1000 µL + 300 µL) |
| Number of transportation steps (pick–up/place back pipette and tip box) | 10 | 4 |
| Time for liquid aspiration | 4 s | 10 s |
| Time for liquid dispensing incl. droplet removal | 4 s | 15 s |
| Last droplet removed by | Pressing button to second pressure point | Moving piston at fast speed up and down |
| Time for single pipetting step (aspiration + dispensing) | 8 s | 25 s |
| Total process time incl. transportation | 12.2 min | 11.1 min |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fleischer, H.; Baumann, D.; Joshi, S.; Chu, X.; Roddelkopf, T.; Klos, M.; Thurow, K. Analytical Measurements and Efficient Process Generation Using a Dual–Arm Robot Equipped with Electronic Pipettes. Energies 2018, 11, 2567. https://doi.org/10.3390/en11102567
Fleischer H, Baumann D, Joshi S, Chu X, Roddelkopf T, Klos M, Thurow K. Analytical Measurements and Efficient Process Generation Using a Dual–Arm Robot Equipped with Electronic Pipettes. Energies. 2018; 11(10):2567. https://doi.org/10.3390/en11102567
Chicago/Turabian StyleFleischer, Heidi, Daniel Baumann, Shalaka Joshi, Xianghua Chu, Thomas Roddelkopf, Michael Klos, and Kerstin Thurow. 2018. "Analytical Measurements and Efficient Process Generation Using a Dual–Arm Robot Equipped with Electronic Pipettes" Energies 11, no. 10: 2567. https://doi.org/10.3390/en11102567