1. Introduction
There is a continuous demand for environmentally friendly technology to fulfill the objective of reducing overall carbon footprints. This pursuit of low-carbon development is reshaping the outlook of future power grids. As a result of the ease of integration and scalability, renewable energy (RE) resources such as photovoltaics and wind turbines are being incorporated in the distribution networks in the form of distributed generation (DG) systems [
1]. Besides RE, the influx of electric vehicles (EVs) in the transportation sector is also increasing. Various countries have introduced new policies to increase the numbers of EVs to promote environmentally friendly transport. The Republic of Korea has proposed raising the number of EVs among the total number of vehicles to 10% by 2020 [
2].
With the increase in penetration levels of EVs, new challenges will arise because presently EVs are being integrated into the distribution system as a dumb load due to their uncoordinated charging. Such charging practice can create complications for the grid with increased stress on the distribution transformer and line congestion. Coordinated charging of EVs has been proposed to reduce the overloading conditions. The EV load is distributed over the tenure of the daily load profile and it is preferred to charge the EVs in off-peak periods. EVs act as a variable or an interruptible load; this technique is called grid-to-vehicle (G2V). Recent research is also considering the use of EVs as a source of generation to provide power back to the grid for peak load periods, thus decreasing grid congestion [
3]. This vehicle-to-grid (V2G) mechanism requires smart EV chargers which have bidirectional power flow characteristics [
4]. Since the V2G strategy depletes the EV battery and increases its usage, EV users should be well compensated for such ancillary services.
Though EVs can be capitalized for V2G/G2V operation individually, the real potential of these EV services is exercised when EVs form a fleet and act as an aggregated storage [
5,
6,
7]. A fleet of EVs under the command of an operator is collectively termed
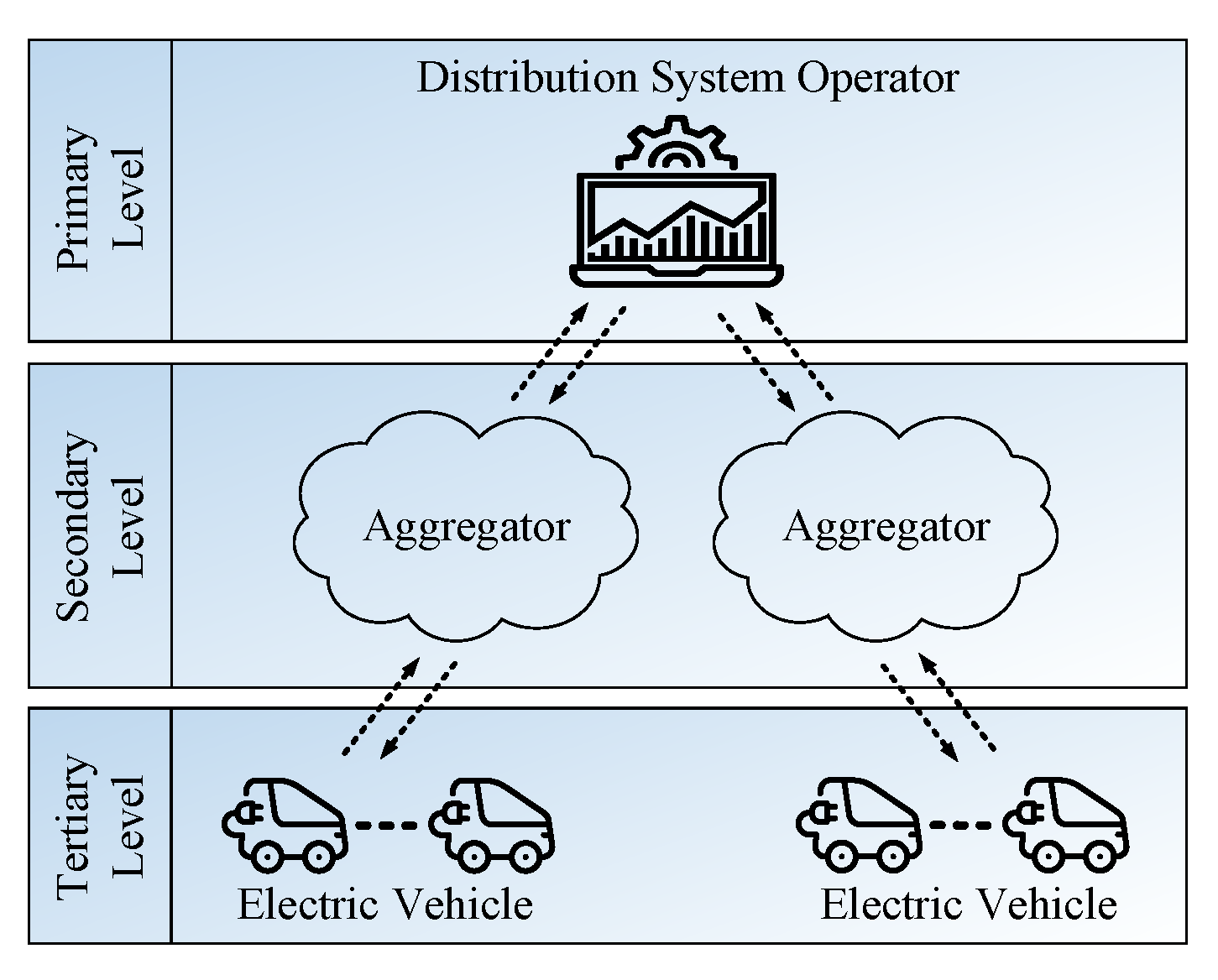
an aggregator. Aggregators act as intermediaries between the distribution system operator (DSO) and EVs. Hierarchical control of EV ancillary services where multiple aggregators are under the jurisdiction of a DSO is more standardized based upon the economical aspects [
8]. To smoothen the load profile of the system using EVs, the coordination among the aggregators has to be supervised by the DSO based upon the energy requirements or potential of each aggregator. Concurrently, the aggregators ensure that the driving needs of the EVs are satisfied if they are engaged in grid support.
Recent research has employed the concept of aggregators to govern the management of EVs. The economic benefits of an EV aggregator are analyzed with V2G grid support while complying with the driving needs of EVs in Reference [
9]. A simultaneous EV plug-in scenario with equal parking duration is considered, ignoring the essential driving pattern modeling. In Reference [
10], charging power allocation of each EV in a parking lot is determined using linear programming in coordination with RE to maximize the profits of the aggregator. A centralized control of EVs has been implemented in Reference [
11] to improve the imbalance caused by wind power variations utilizing V2G/G2V techniques. In both these studies [
10,
11], consideration is not given to the application of EVs to improve the overall load profile from the grid perspective. In Reference [
12], V2G has been explored in the form of a single aggregated battery model on a transmission level. Various cases have been simulated with wind power fluctuations, showing a reduction in power exchange deviations. Since the battery model is an aggregated model based on a single EV type, control of individual EVs is neglected. An EV scheduling procedure is designed to minimize the cost for the DSO and parking lot by finding an equilibrium point between the objectives of both entities, along with the consideration of wind power uncertainty [
13]. Reference [
14] proposes a V2G mechanism for the mitigation of solar energy impact with voltage support functionality. The system design does not consider a proper EV mobility model, as half of the total EVs are assumed to be plugged-in at all times. All these studies are focused on the interaction of a system operator with the EVs aggregated within a single command unit.
Coordination of multiple aggregators for EV charging has been investigated in Reference [
15,
16]. In Reference [
15], a fast heuristic algorithm determines the charging power for all EVs within each aggregator to minimize the charging costs. Reference [
16] proposes an adjustable power charging method, which takes into account the EV owner’s preferences to establish a fair dispatch of power among the EV aggregators. Both these schemes aim for peak load reduction without considering V2G, and thus the load variance is only minimized to a certain level. V2G functionalities of EVs to support frequency deviations are studied at a transmission level while considering multiple aggregators [
17]. A simplistic approach is used to distribute power among the aggregators without considering the real-time feedback from the EVs under each aggregator’s domain, which can be problematic in practical scenarios. A coordinated control system for EV aggregators and traditional power plants is proposed to decrease the frequency deviations and output power variations of the power plants [
18]. The characteristics such as EV dynamics and its initial state-of-charge (SoC) calculation are not incorporated. In Reference [
19], the scheduling of EVs under the management of aggregators to provide reserve capacity for the compensation of RE power deviations is proposed. The results suggest that the peak load demand of the system did not increase, although the mechanism to achieve the objective to flatten the load profile is not discussed. Furthermore, the aspect regarding the unavailability of required EV SoC at the customer’s desired time and the resultant cancellation of the trip is unfeasible. Reference [
20] proposes a hierarchical control of EVs to support the RE intermittency, thus minimizing the dependency for backup generation to reduce the system operation cost. Overall, the research lacks a coordination procedure among multiple aggregators to execute V2G/G2V for load profile smoothing together with RE accommodation.
The minimization of load variance and adherence of the load profile to its target value establishes the potential for further load addition without network reinforcement. Numerous studies have considered the application of EVs to achieve this objective. A peak shaving and valley filling technique is proposed in Reference [
21] for the achievement of the target load profile with V2G/G2V. The aspects of EV mobility are not considered in this study. Reference [
22] showed that a coordinated control algorithm can be implemented to attain almost similar results to the optimal solution as defined by the objective function in Reference [
21] with less computational burden. However, employing a higher EV penetration rate results in the rebounding effect with another peak occurring at the off-peak hours during EV charging. A distributed price-based coordination control of EVs is proposed in Reference [
23] with the incorporation of RE. The scheme is not applicable for a large-scale occupation of EVs and the load variance abatement operation is based upon forecasting. In addition, real-time scenarios are not considered.
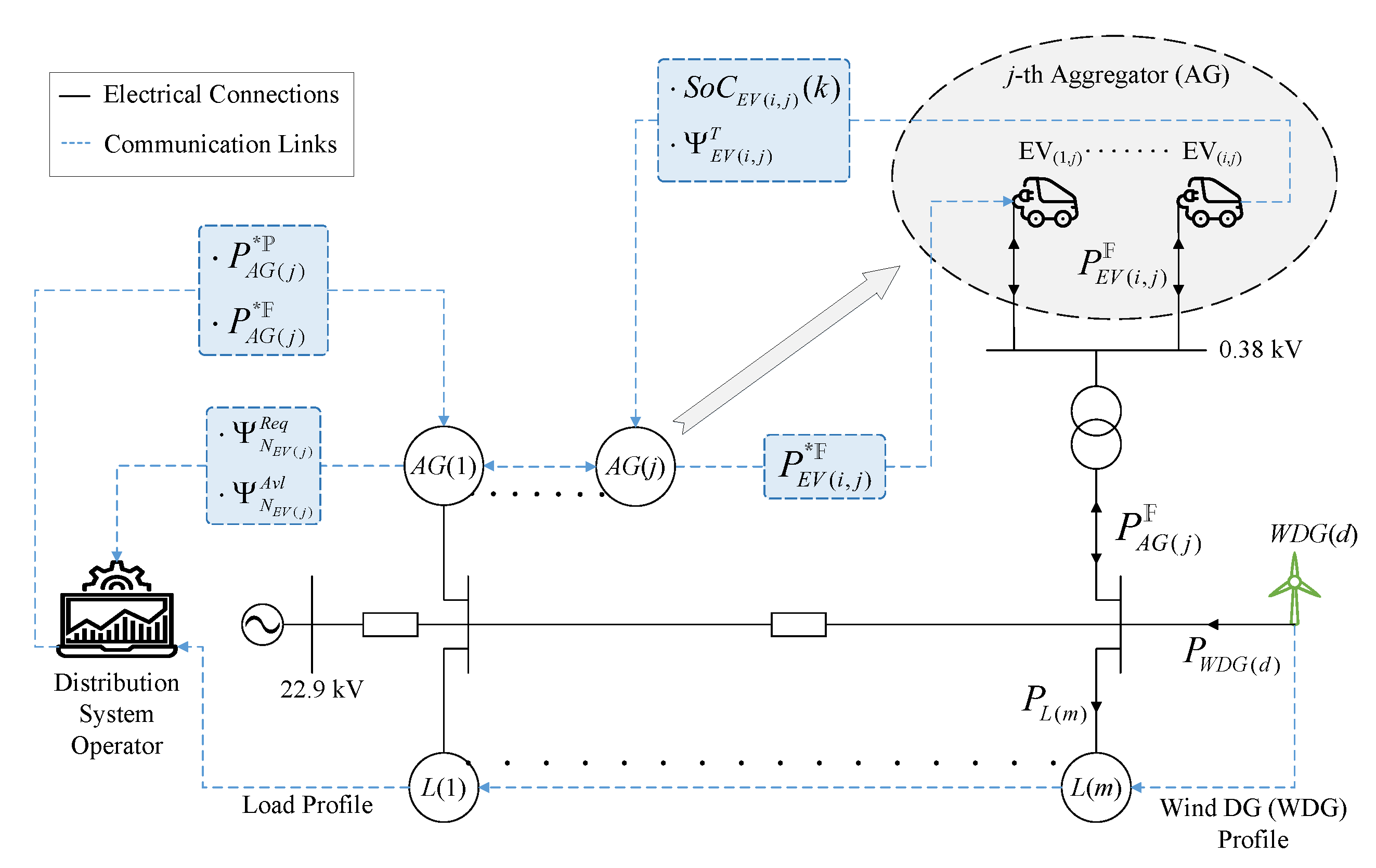
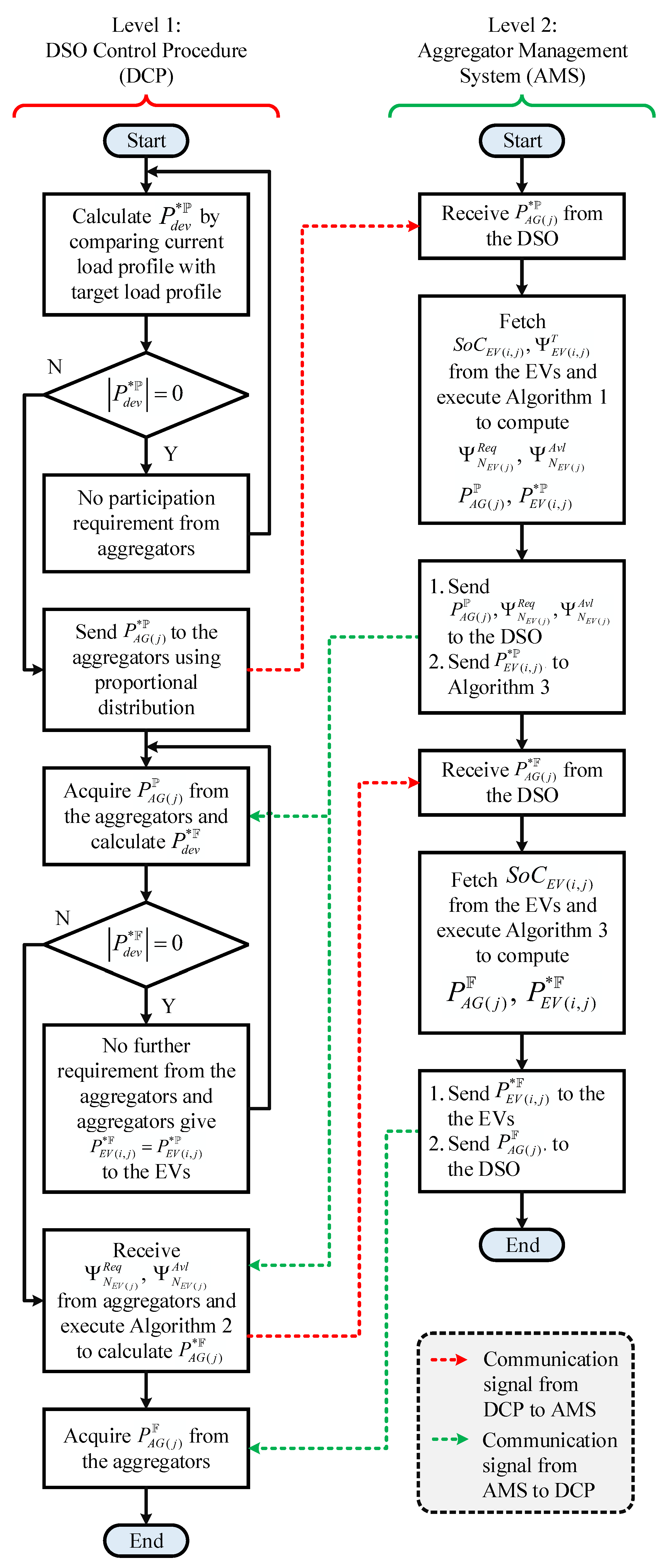
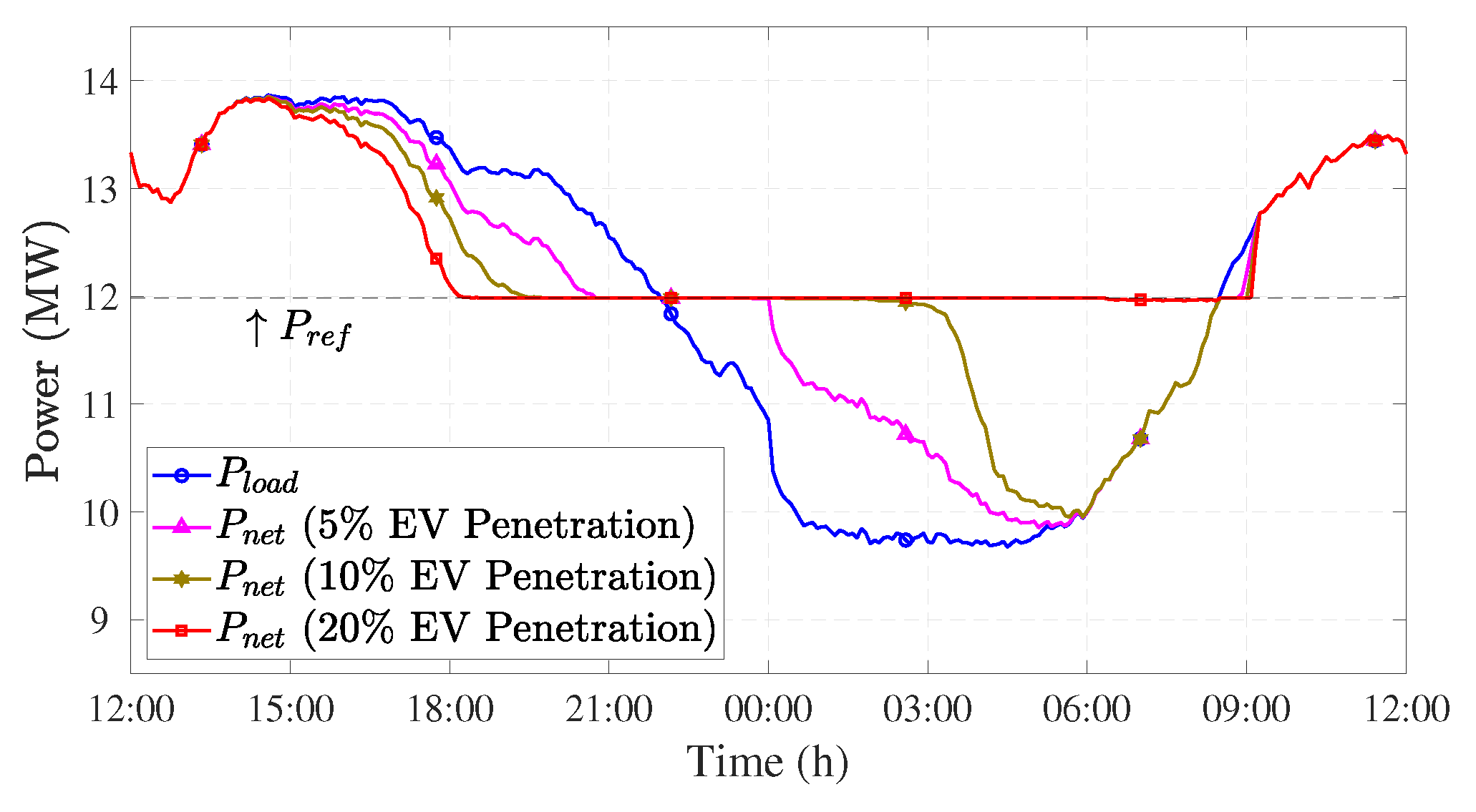
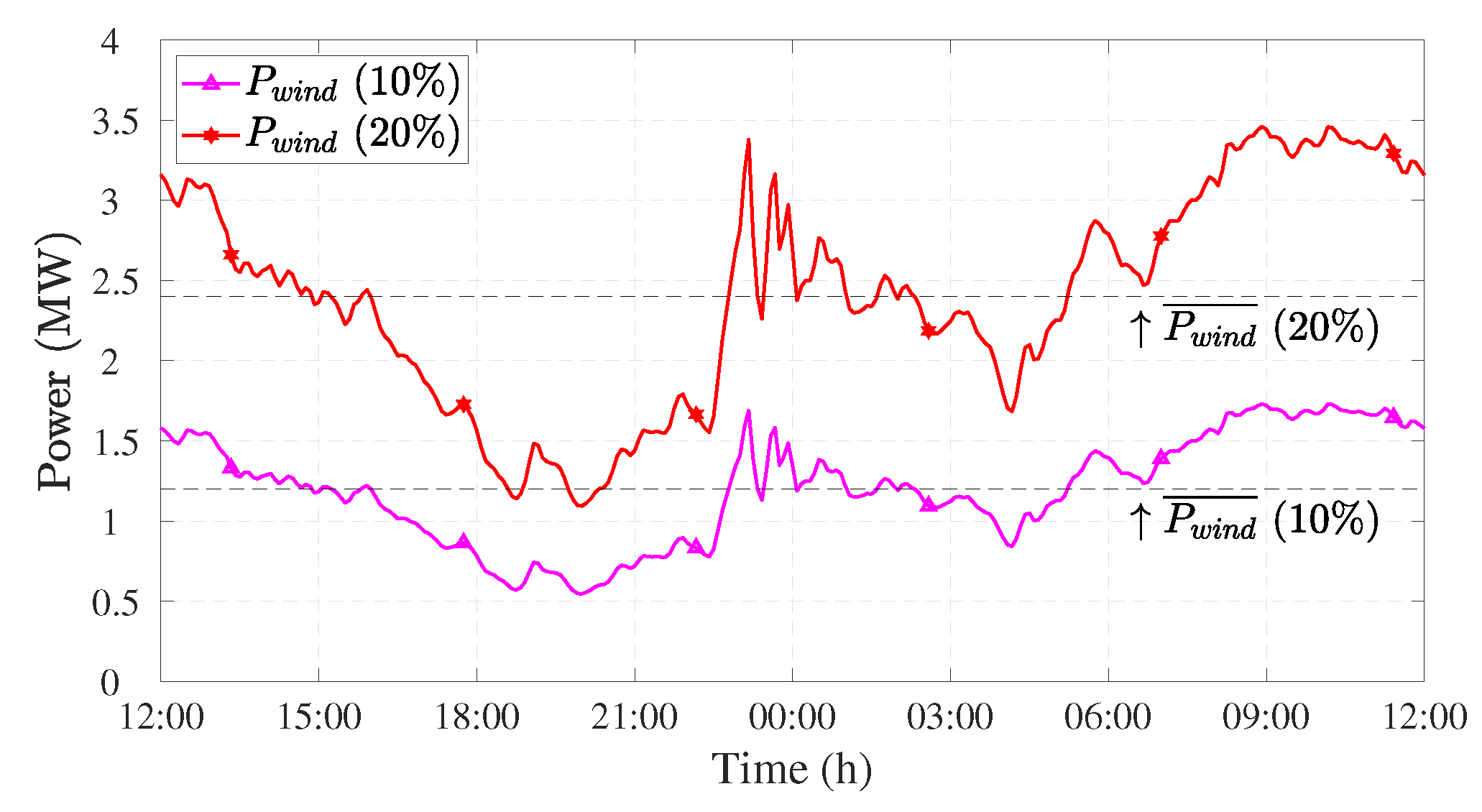
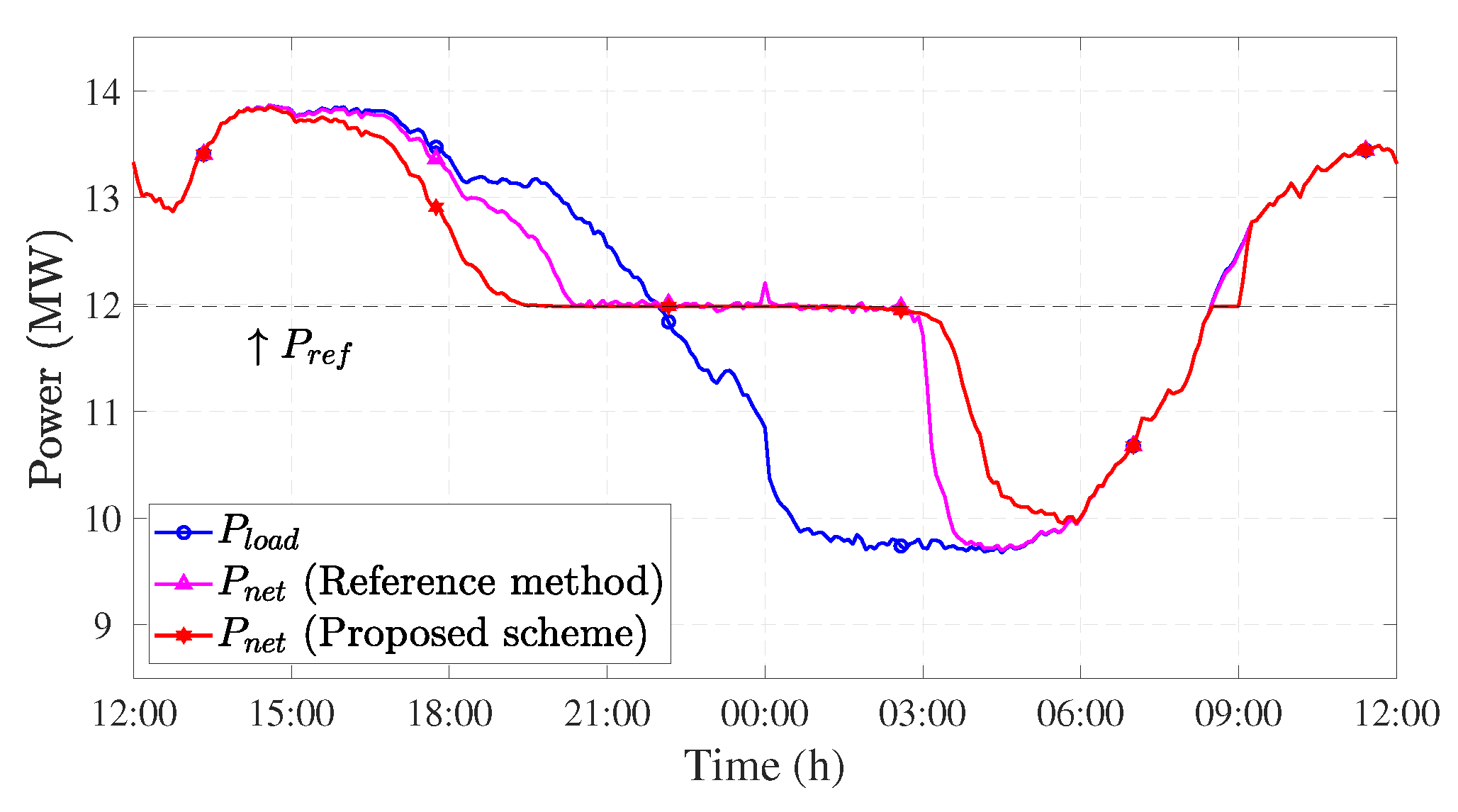
In this paper, we have proposed a multiple aggregator coordination strategy to utilize the EVs for grid support. The design is composed of a bi-level structure: an upper-level system implemented at the DSO, called the DSO control procedure (DCP) which regulates all the aggregators, and a lower level control which is executed at each aggregator to manage the EVs, termed as the aggregator management system (AMS). The scheme employs the V2G/G2V operation to pursue the objectives of peak load reduction and valley filling whilst considering the stochastic mobility characteristics of EVs, and thus fulfills their driving needs. The AMS executes a decisive procedure based upon a water-filling (WF) algorithm to allocate power to the EVs. The competence of the proposed methodology is verified on a real medium voltage (MV) distribution system located in Seoul, Korea. The respective traffic volume data of the feeder regarding its load locations and vehicle mobility trends in Korea are adopted. Various factors are defined to asses the effectiveness of the scheme under different study cases such as comparison with uncontrolled EV charging and different EV penetration levels. The adaptivity of the method to RE incorporation is also tested, where EVs tend to compensate for the RE intermittency and aim for load variance minimization simultaneously. Lastly, the performance of the proposed strategy is compared with an existing load leveling scheme to show its significance.
As such, the proposed scheme is a rigorous methodology which integrates the important aspects of the previous literature such as multiple aggregators coordination, RE compensation, and load curve flattening through EV support, and it utilizes a fast WF method for its operation. The main contributions of this work can be summarized as follows:
A coordination approach for multiple EV aggregators is proposed to smoothen the system load profile. The hierarchical control structure provides an efficient interaction over all levels using a bi-directional flow and fulfills the objectives at each level.
The scheme operates in an on-line fashion without the requirement of off-line forecasting, which makes it favorable for RE induction.
The bi-level algorithm is fast and does not require heavy iterative computations even when the number of EVs is large.
The proposed method has a better performance than Reference [
22] as indicated in the results.
The rest of the paper is organized as follows:
Section 2 presents the overall system architecture and states the modeling of the EVs.
Section 3 gives a detailed insight into the proposed bi-level coordination scheme in a step-by-step approach. The simulation cases are outlined in
Section 4. A thorough illustration and discussion of the results obtained from the study cases are given in
Section 5.
Section 6 concludes the results and summarizes the findings.

 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}