Power Management of the DC Bus Connected Converters in a Hybrid AC/DC Microgrid Tied to the Main Grid

 , ,
, ,
Abstract
:1. Introduction
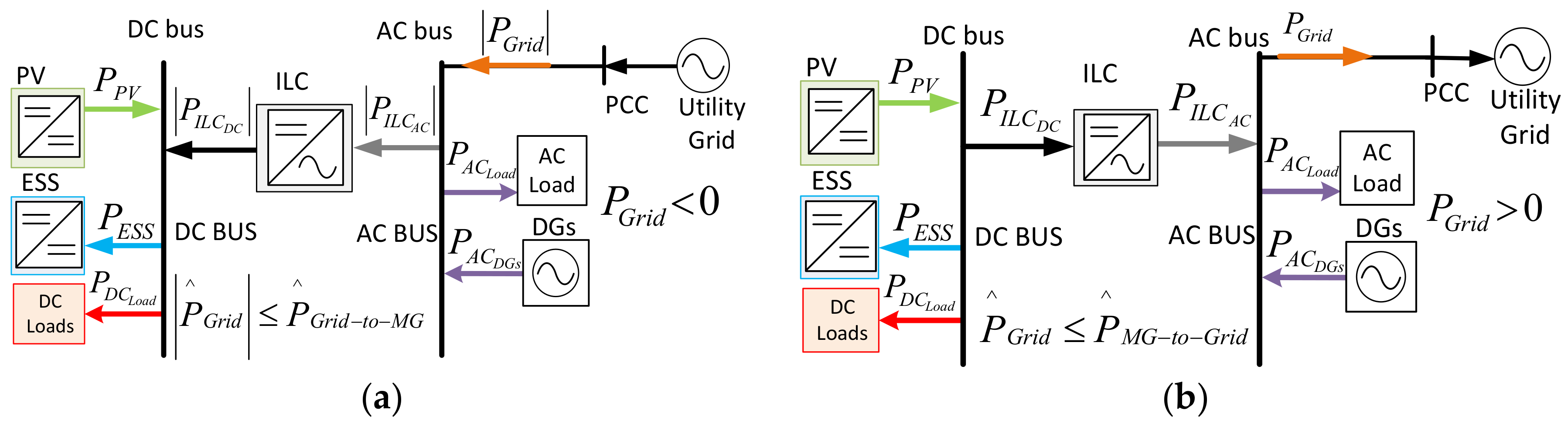
2. Description of the Hybrid AC/DC Microgrid under Study
3. Management and Control of the MG
3.1. Parameters of the MGCP
3.1.1. High-Level Control Limits
Energy Dispatch Limit (EDL)
Maximum Power Extracted from the Grid
Maximum Power Injected to the Grid
3.1.2. Parameters of the MGCP
Maximum Power Extracted from the AC Bus to the DC Bus Measured at the AC Side of the ILC
Maximum Power Injected from the DC Bus to the AC Bus Measured at the AC Side of the ILC
PV Power Generated in the DC Bus
Power Consumed by the Loads Connected to the DC and AC Buses
Maximum Power Consumed by the Loads Connected to the DC Bus
PV Power Limit
PV Generation Power Available in the DC Bus
DC Load Switch
DC Load Hysteresis
Power Consumed for the Batteries to C10
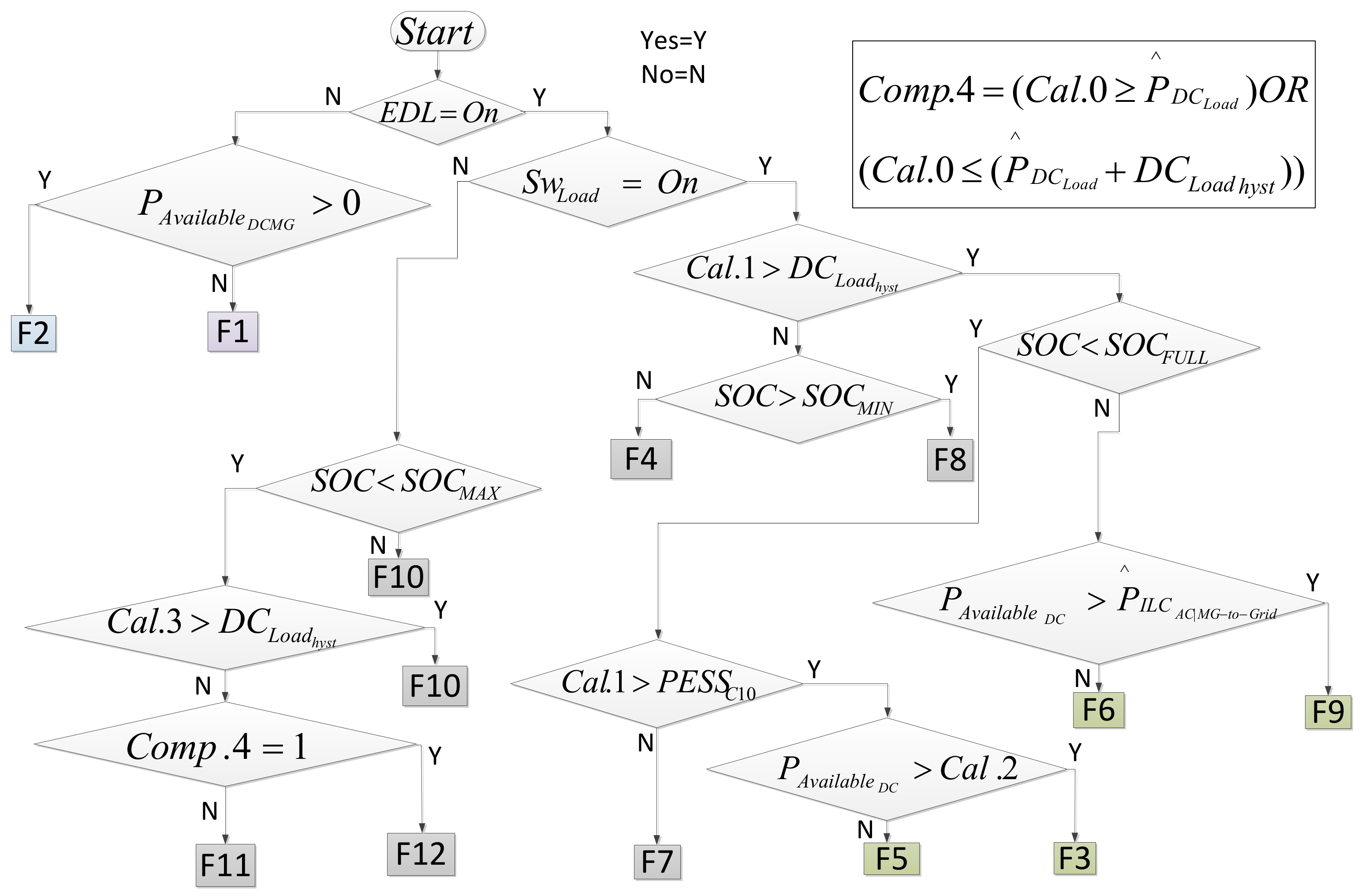
3.2. Power Management Algorithm
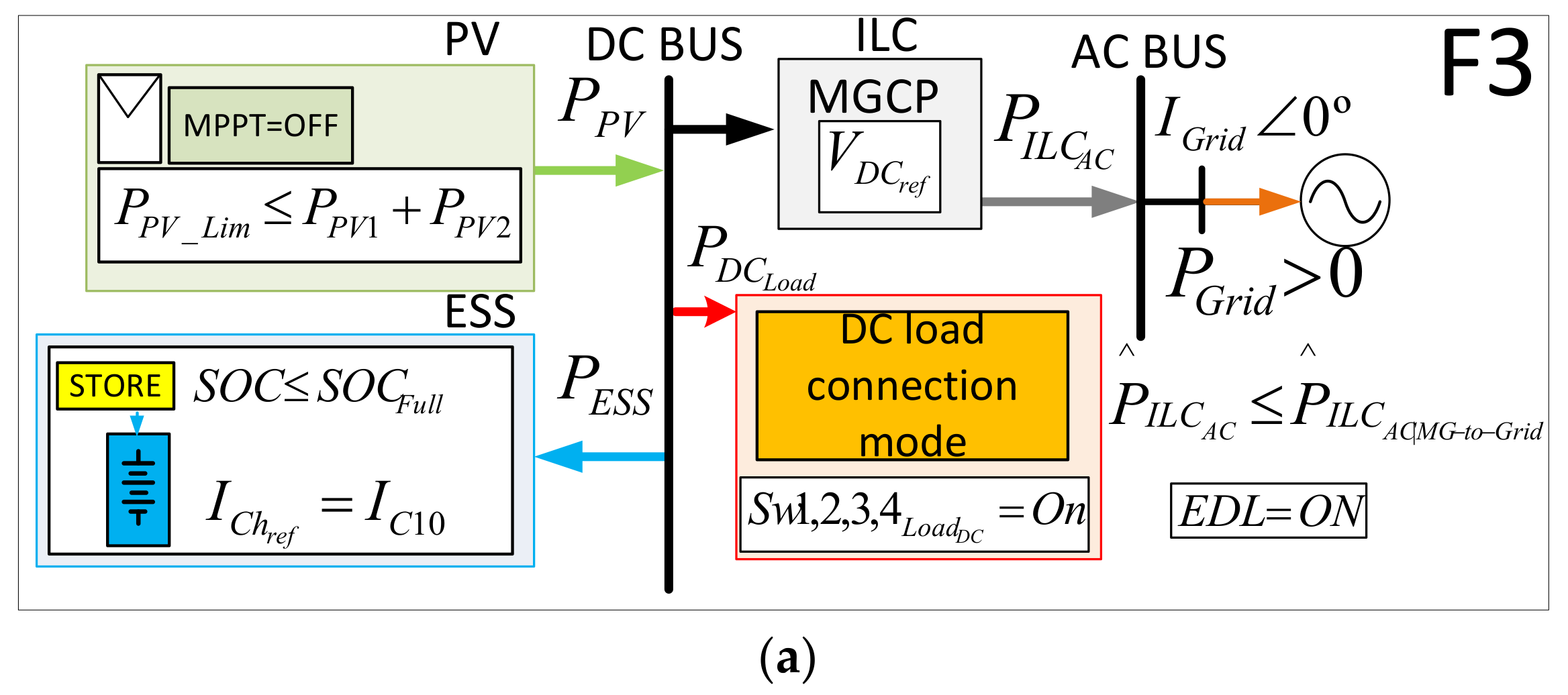
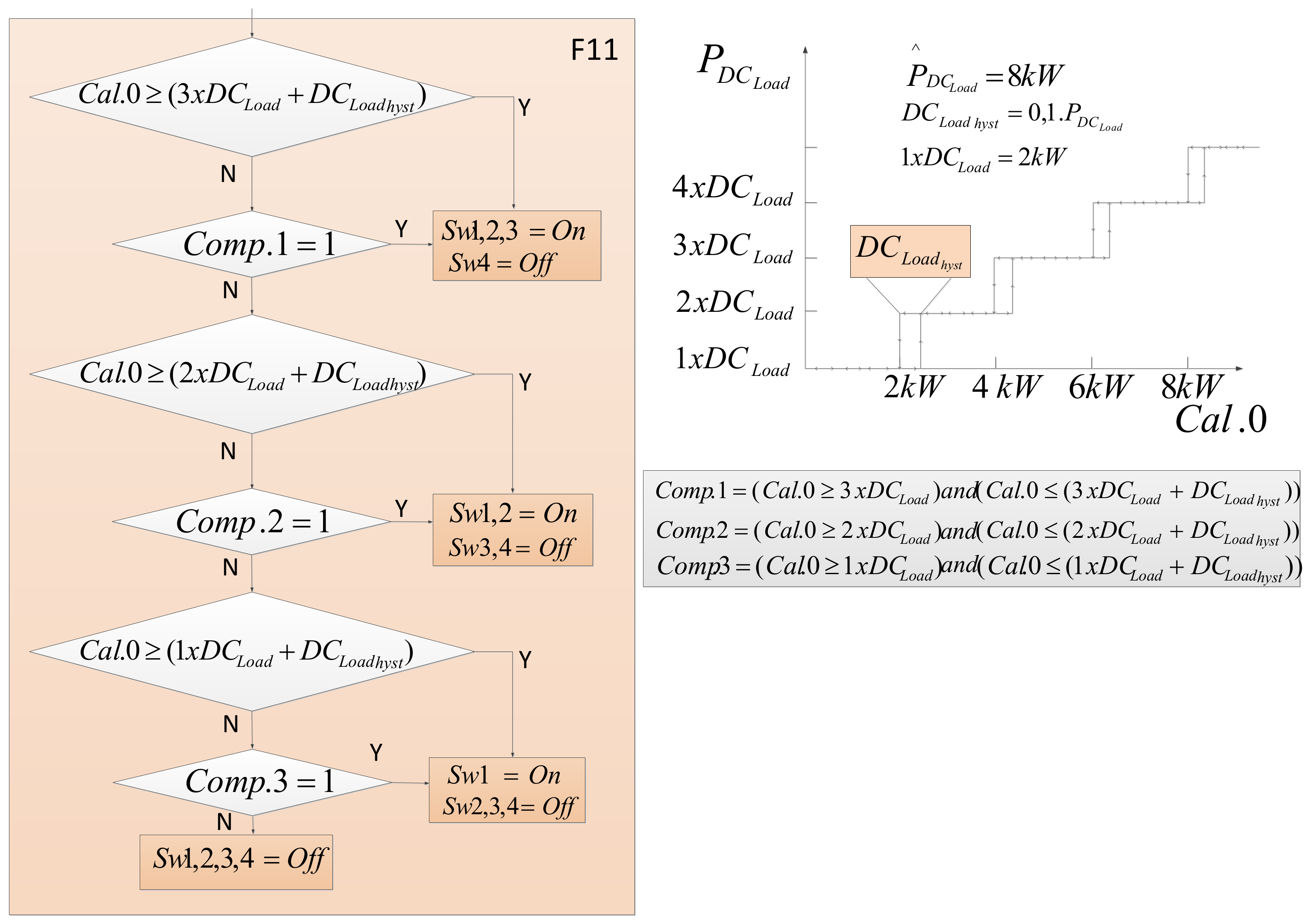
3.2.1. Operation Functions of the MGCP
Operation Functions in DC Load Connection Mode (SwLoad = On)
Operation Functions in DC Load Disconnection Mode (SwLoad = Off)
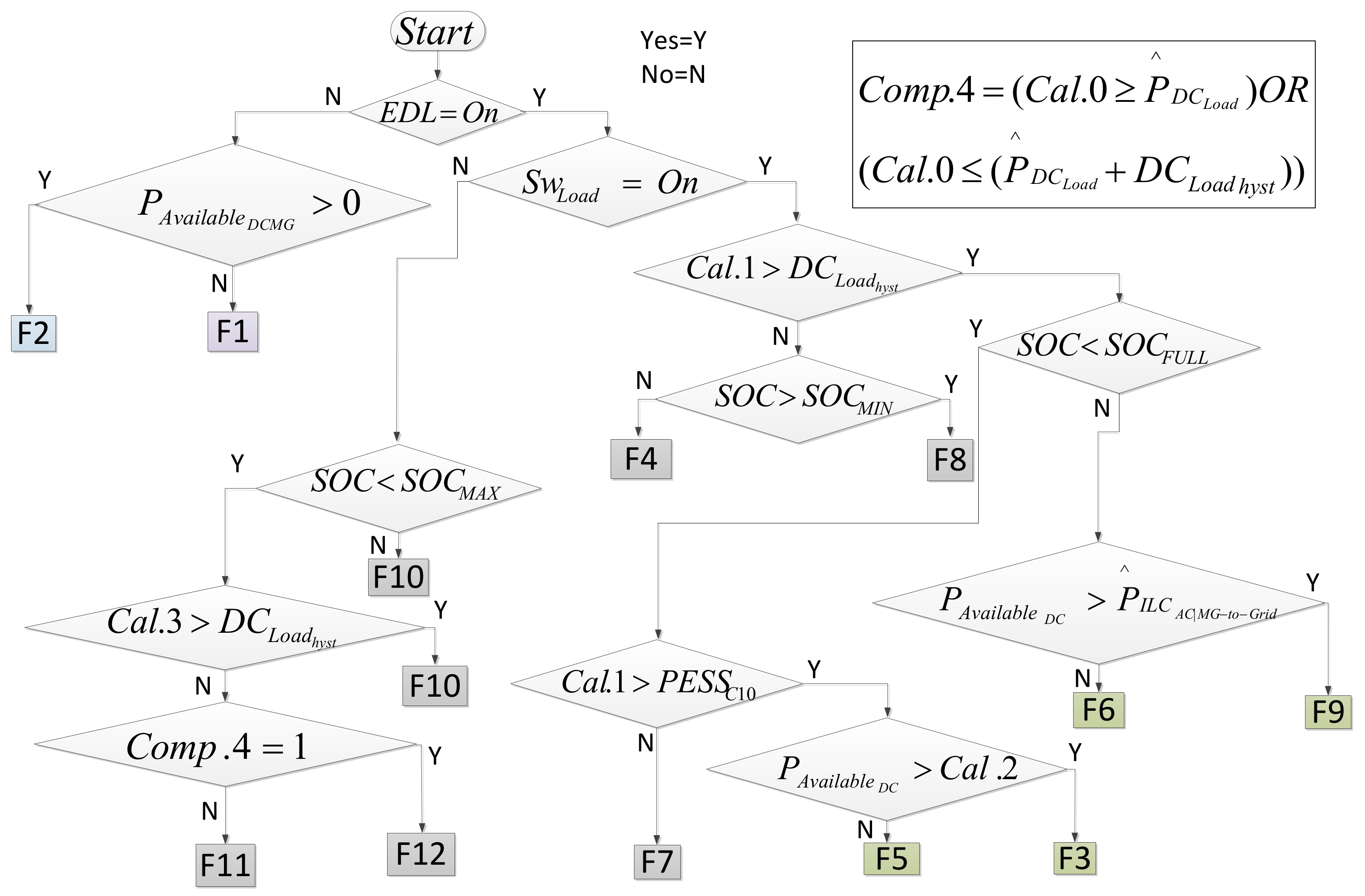
3.2.2. Power Management Algorithm of the MG
4. Simulation and Experimental Results
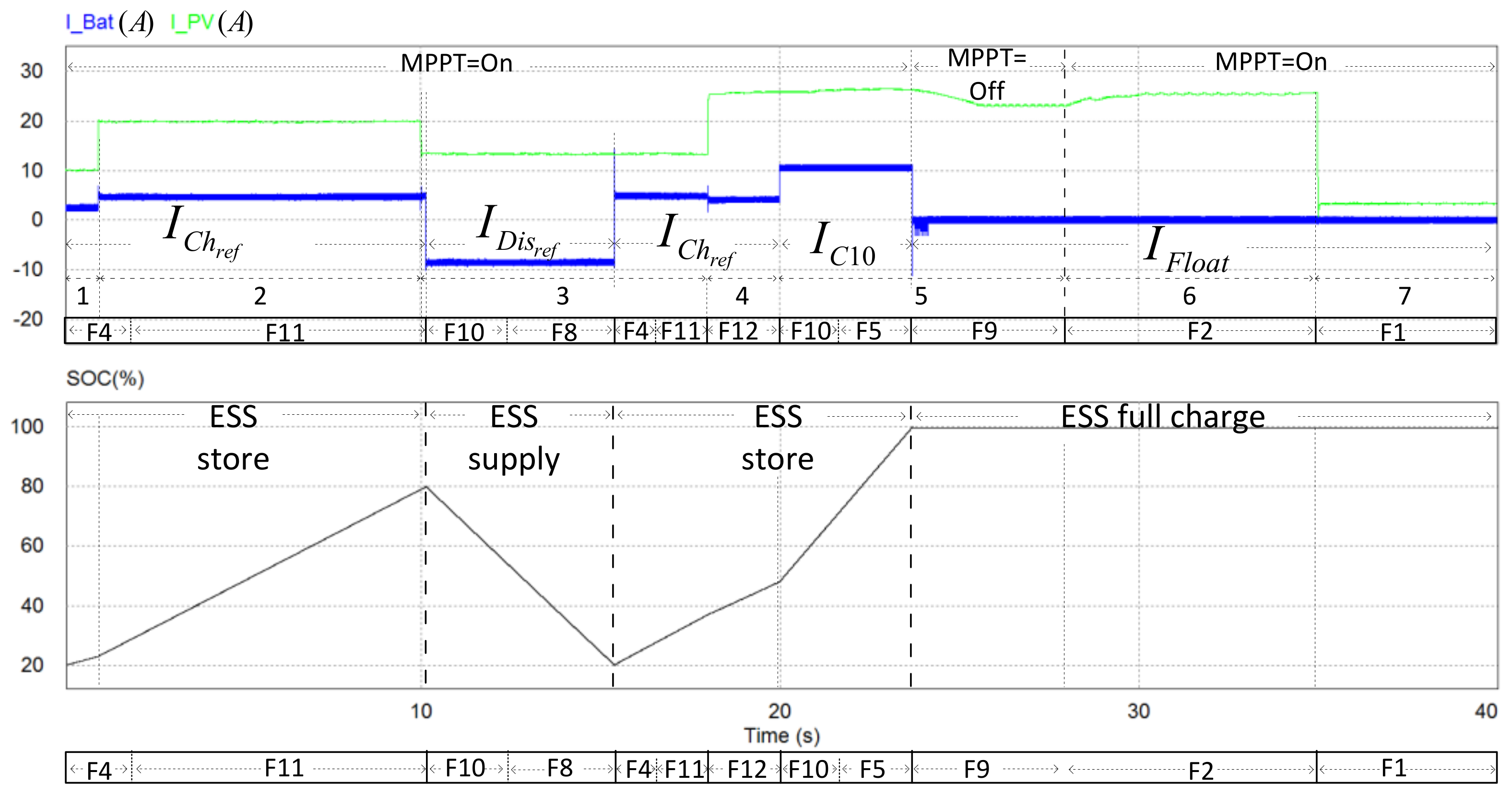
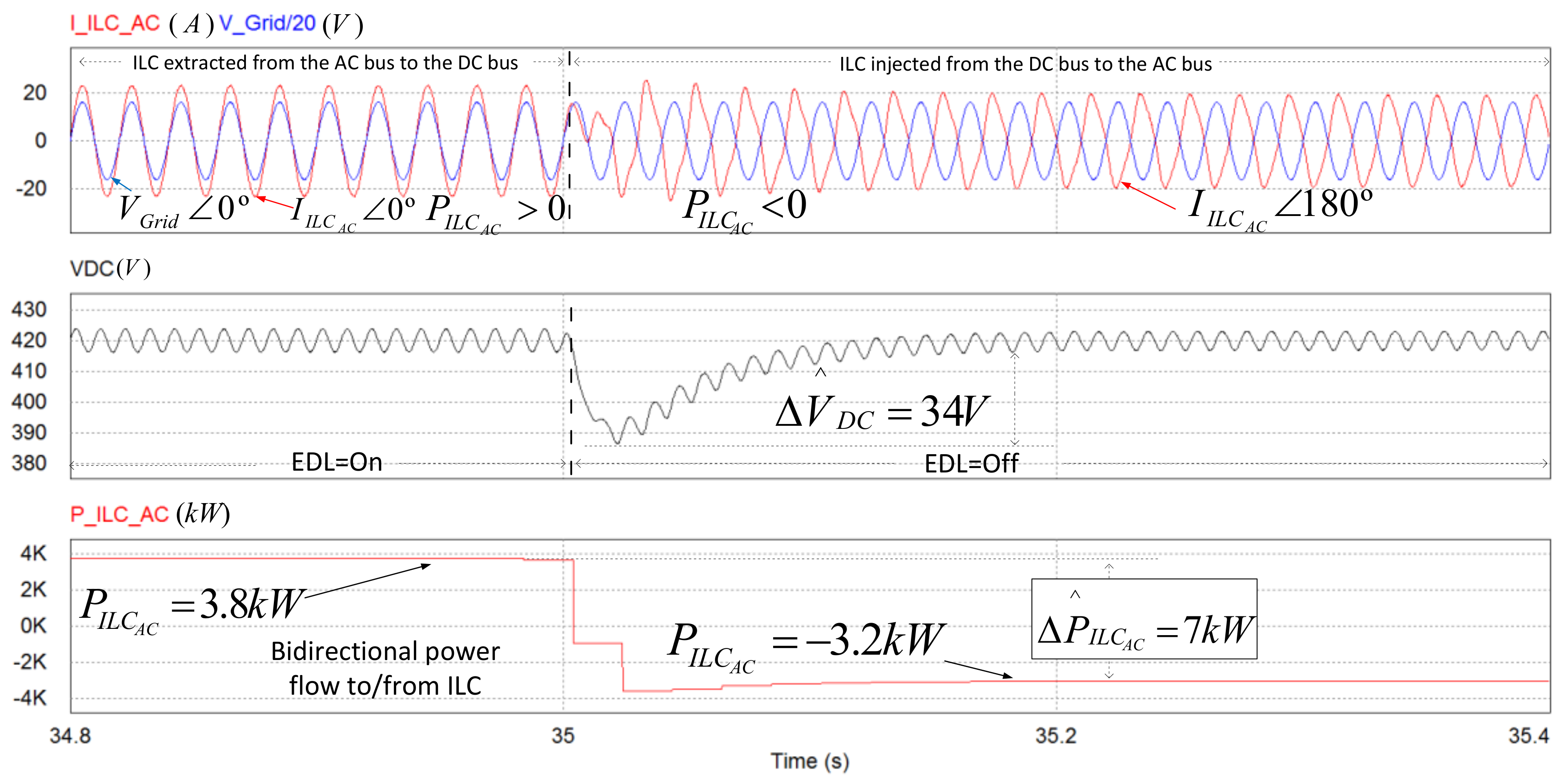
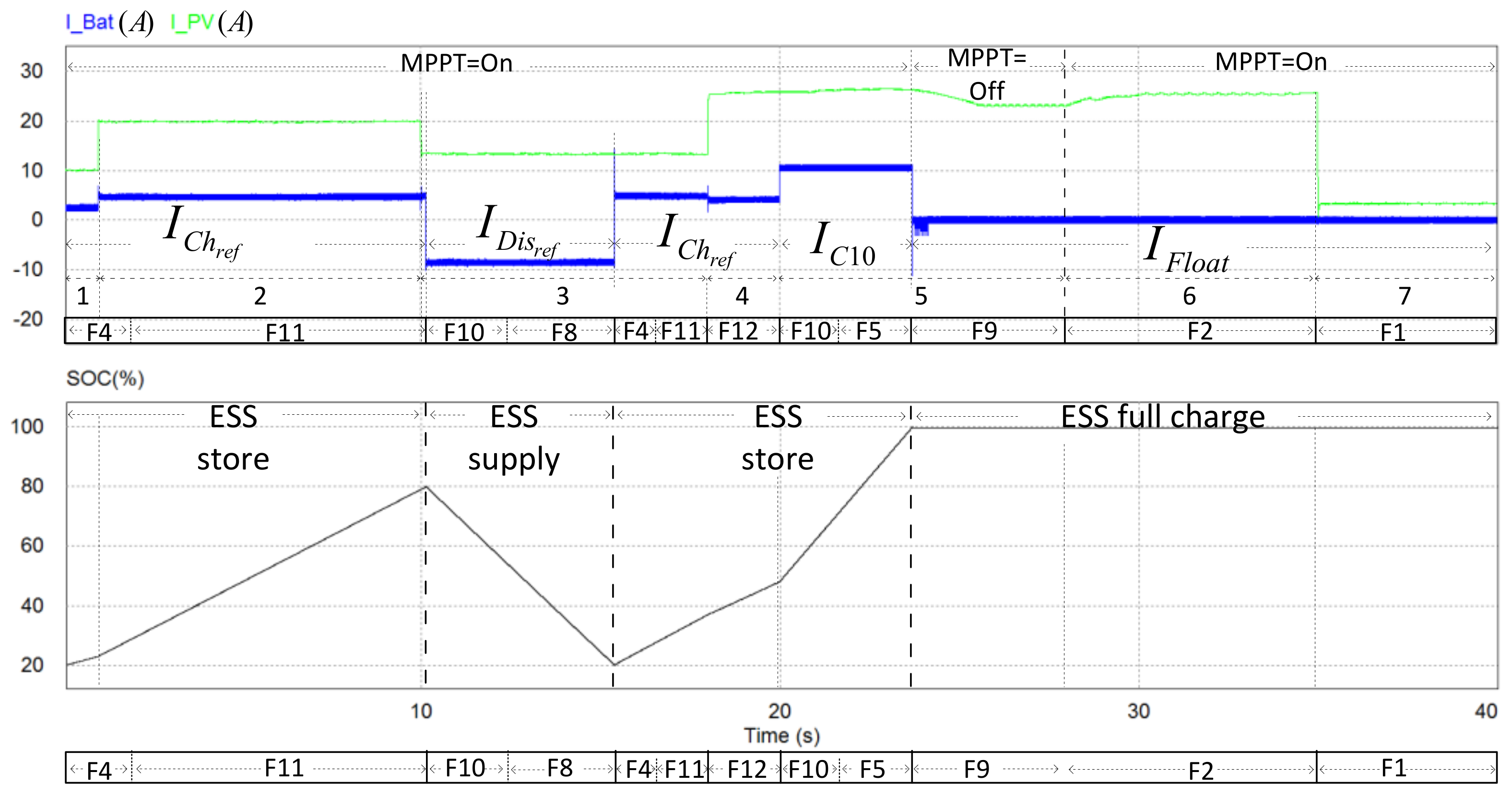
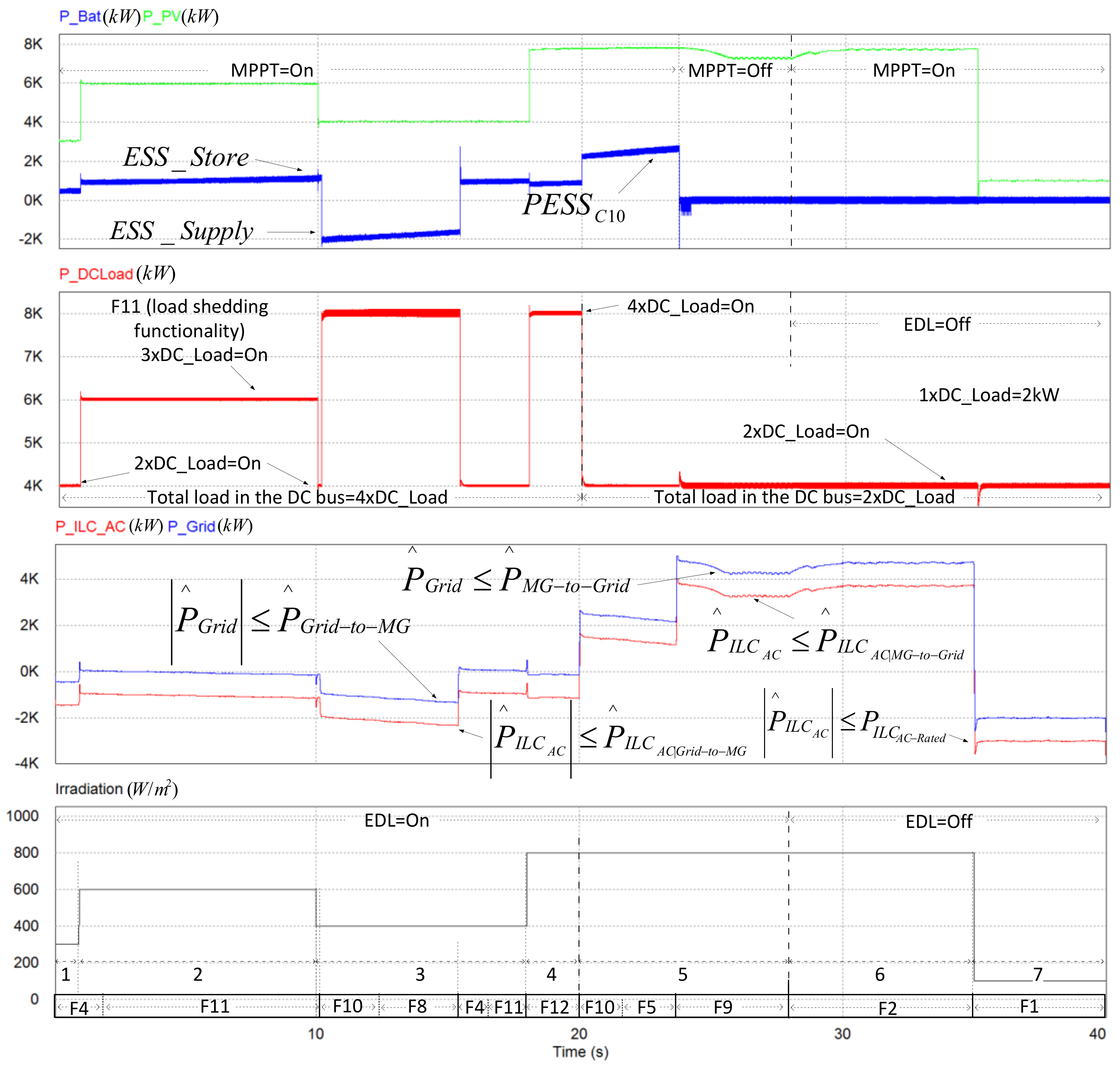
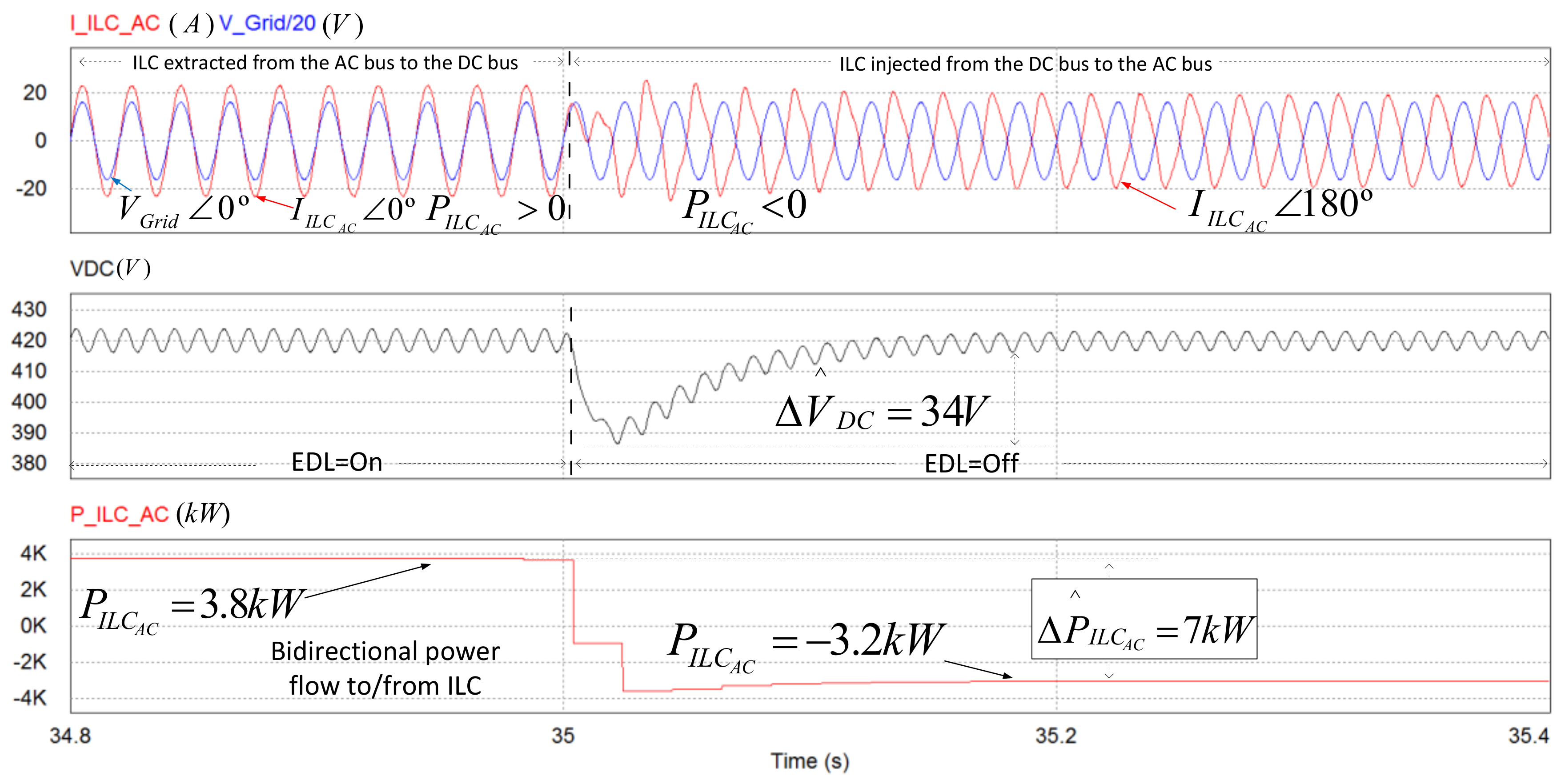
4.1. Simulation Results
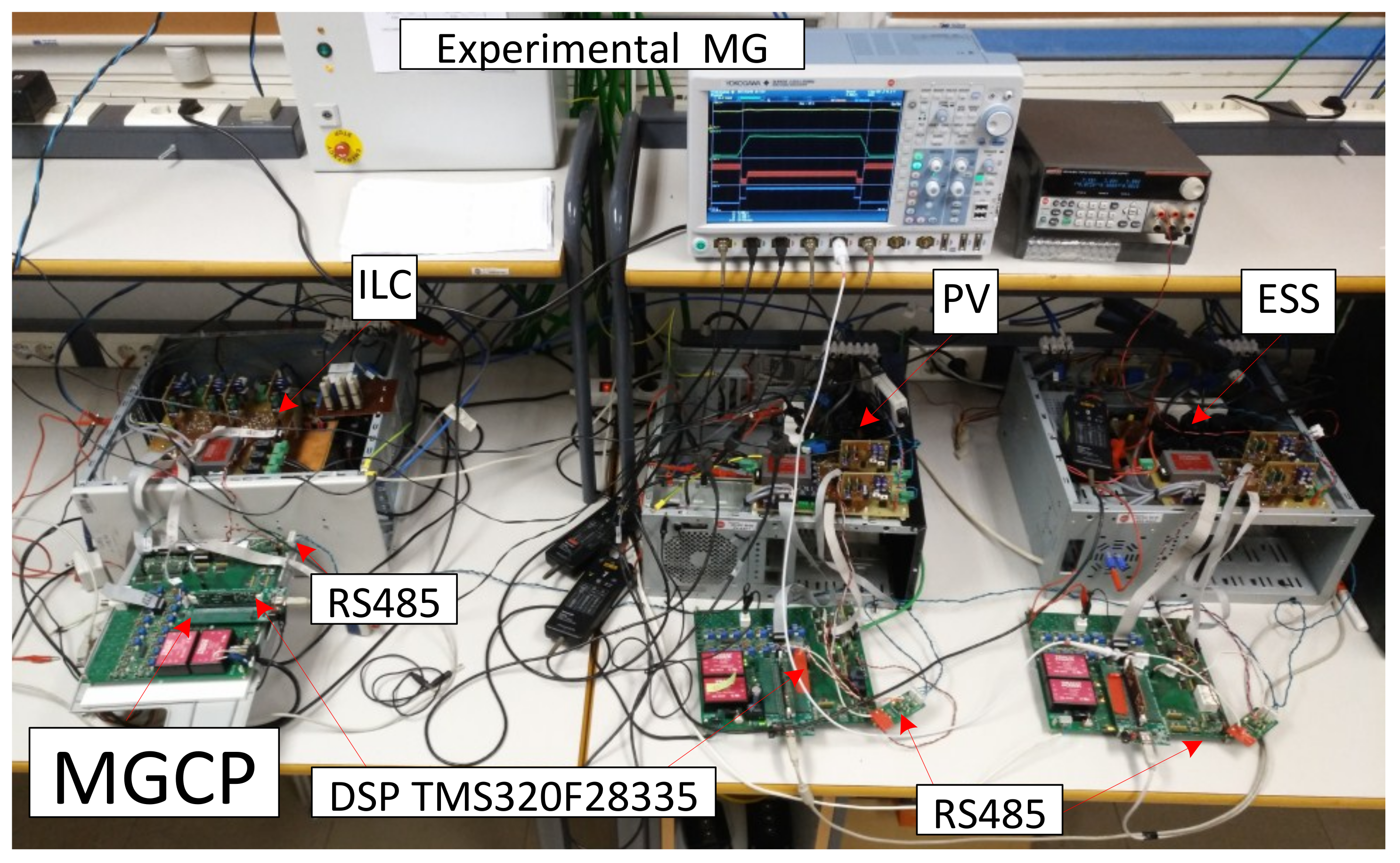
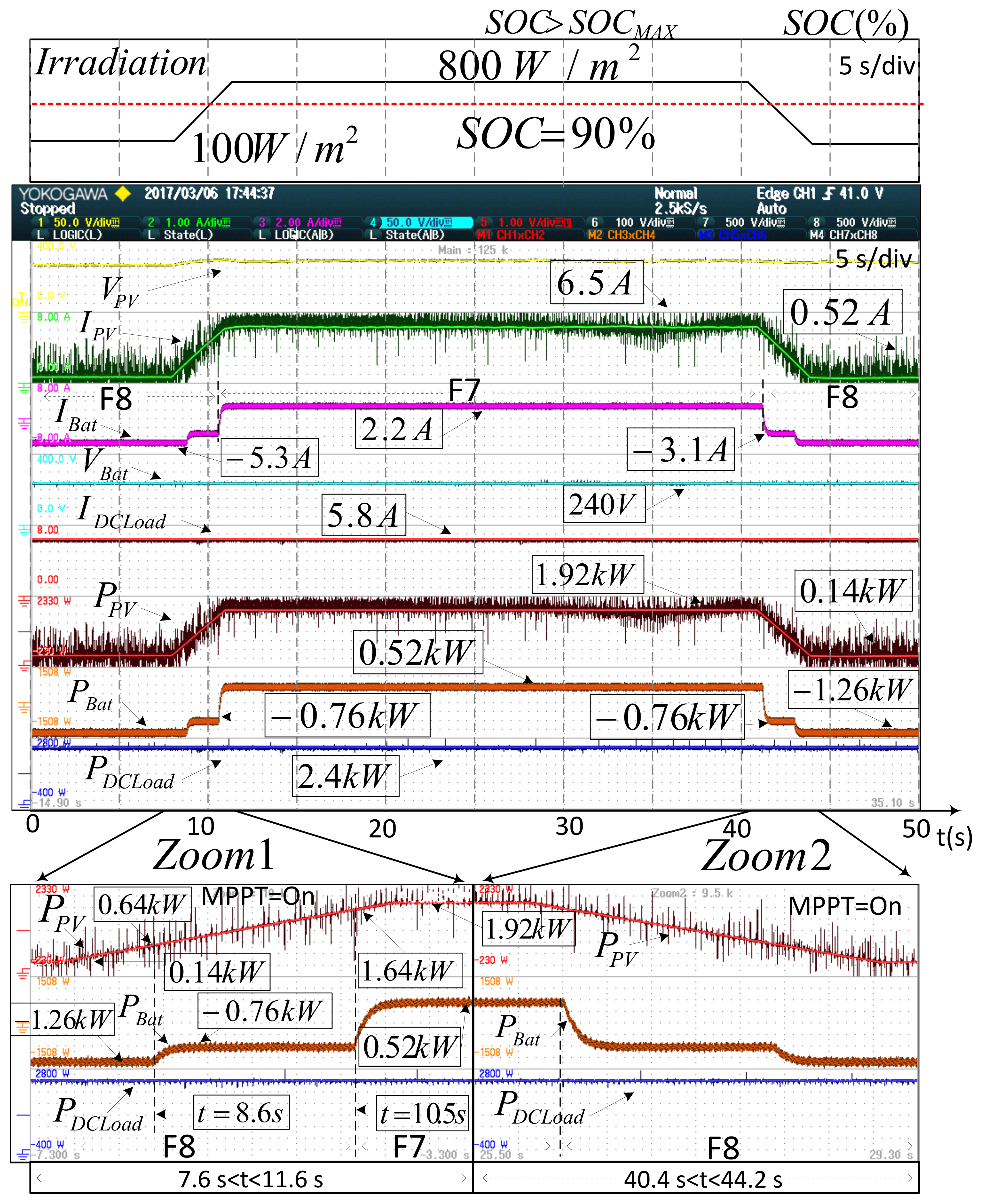
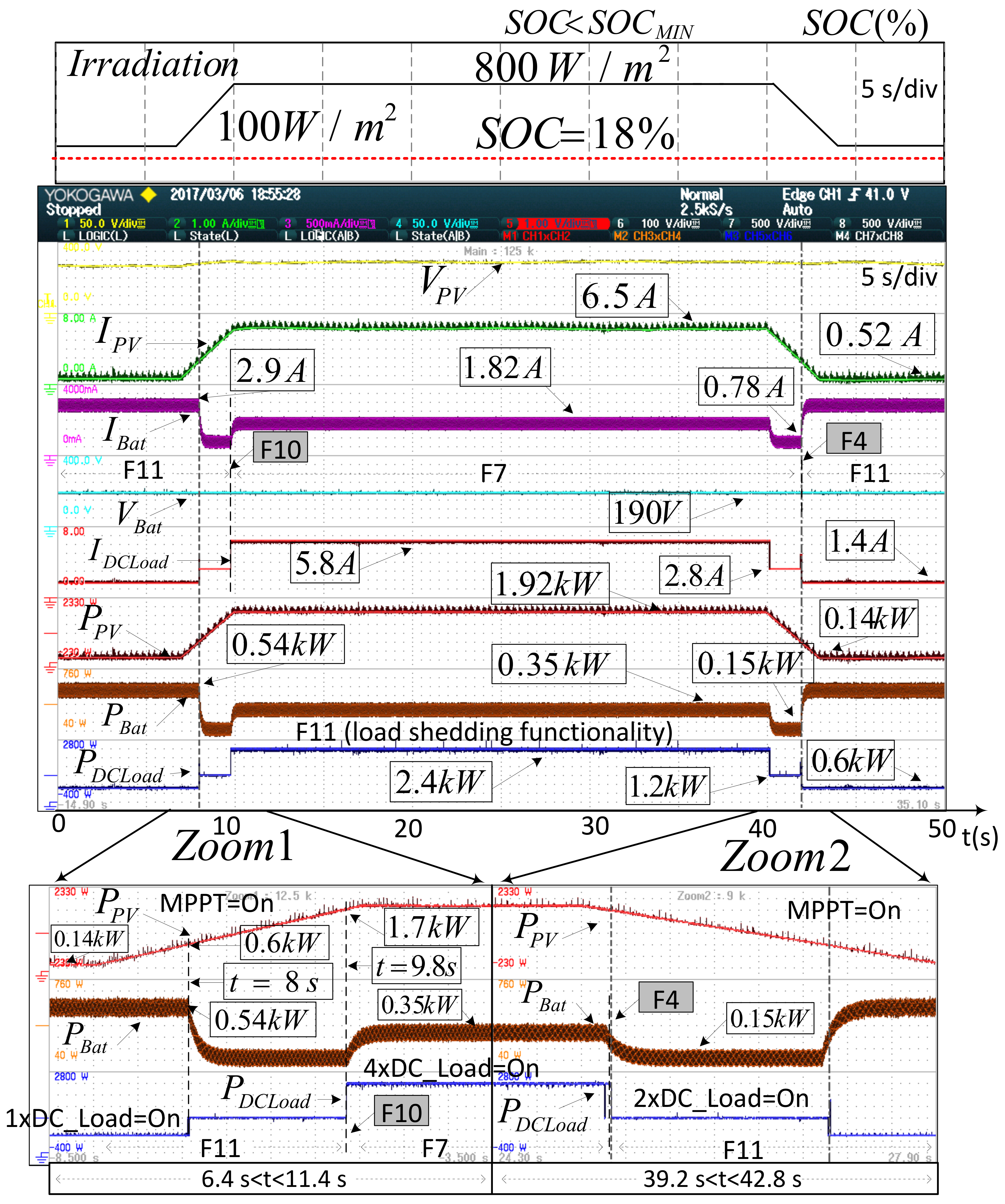
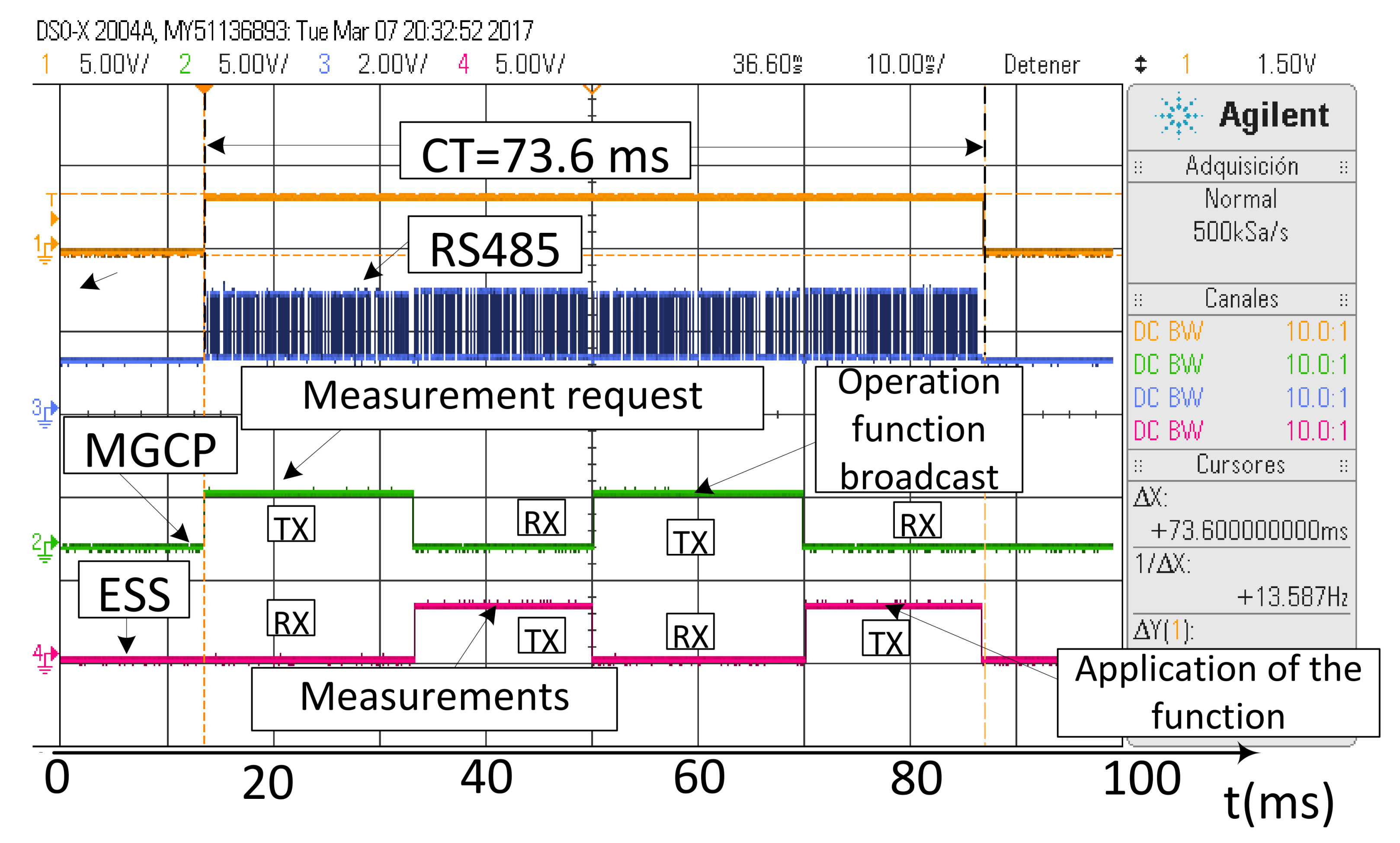
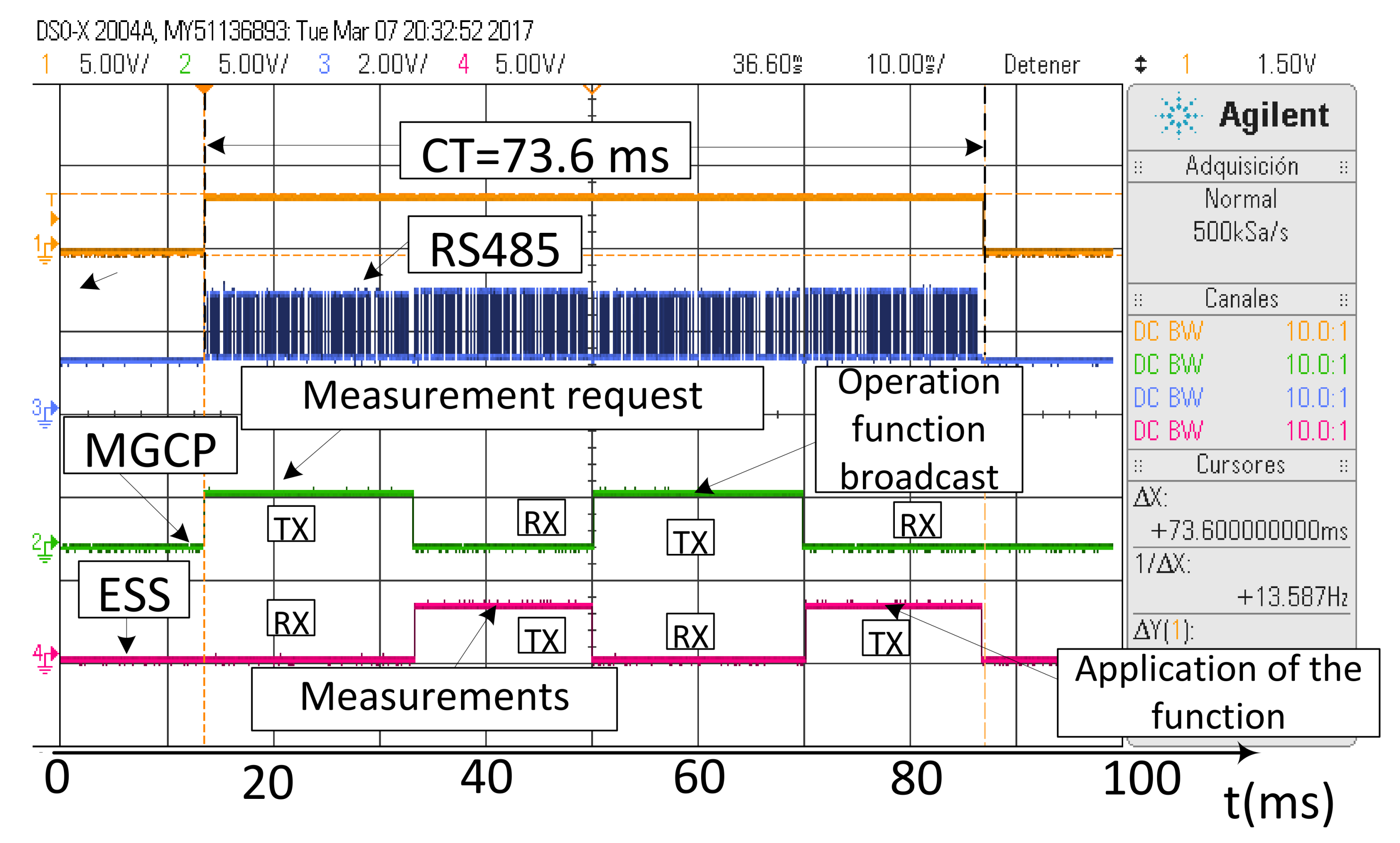
4.2. Experimental Results
4.3. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| PPV1, PPV2 | Power supplied by the PV arrays 1 and 2 |
| PPV | Total PV power generated by the DC MG |
| PDCLoad | Total power consumed by the DC loads |
| PGrid | Power injected from the hybrid AC/DC microgrid to the main grid |
| PILC_AC | Power injected from the DC bus to the AC bus by the ILC, measured at the AC side of the ILC |
| PILC_DC | Power injected from the DC bus to the AC bus by the ILC, measured at the DC side of the ILC |
| PESS | Power absorbed by ESS from the DC bus |
| PBat | Battery bank charge power |
| PACLoad | Total power consumed by the AC loads |
| PAC_DGs | Power supplied by the AC DGs |
| ηEES | Efficiency of the ESS |
| ηPV1, ηPV2 | Efficiency of the PV DC/DC converters 1 and 2 |
| ηILC | Efficiency of the ILC |
| IGrid | RMS Current injected from the hybrid AC/DC microgrid to the main grid |
| VGrid | RMS value of the grid voltage |
| ω | Grid angular frequency |
| φ | Grid phase |
| IACLoad | Total RMS current consumed by the AC loads |
| IDCLoad | Total current consumed by the DC loads |
| VDC | DC bus voltage |
| IILC_AC | RMS current injected from the ILC to the AC bus |
| SOC | State of charge of the battery bank |
| IBat | Charge current of the battery bank |
| VBat | Voltage of the battery bank |
| ICh_ref | Reference of the charge current of the battery bank |
| IDis_ref | Reference of the discharge current of the battery bank |
| IPV1, IPV2 | Current supplied by the PV arrays 1 and 2 |
| PPV_Lim | Limit of the PV power generation |
| IDCLoad | Total current consumed by the DC loads |
| SW1,2,3,4DC_Load | Switches of the DC loads (loads 1 to 4) |
| EDL | Energy dispatch limit |
| Maximum power drawn from the grid to the hybrid AC/DC microgrid | |
| Maximum power injected to the grid from the hybrid AC/DC microgrid | |
| Maximum power drawn from the AC bus to the DC bus measured at the AC side of the ILC | |
| Maximum power injected from the DC bus to the AC bus, measured at the AC side of the ILC | |
| Rated power of the ILC | |
| Maximum power consumed by the DC loads | |
| PAvailableDC_MG | Power available at the DC bus of the MG |
| DCLoad_hyst | Power hysteresis level used by the load shedding functionality |
| PESSC10 | Power drawn by the ESS from the DC bus at a charge current of the battery bank equal to IC10 |
References
- Olivares, D.E.; Mehrizi-Sani, A.; Etemadi, A.H.; Cañizares, C.A.; Iravani, R.; Kazerani, M.; Hajimiragha, A.H.; Gomis-Bellmunt, O.; Saeedifard, M.; Palma-Behnke, R.; et al. Trends in Microgrid Control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Dragičević, T.; Lu, X.; Vasquez, J.C.; Guerrero, J.M. DC Microgrids—Part I: A Review of Control Strategies and Stabilization Techniques. IEEE Trans. Power Electron. 2016, 31, 4876–4891. [Google Scholar]
- Cagnano, A.; de Tuglie, E.; Cicognani, L. Prince—Electrical Energy Systems Lab: A pilot project for smart microgrids. Electr. Power Syst. Res. 2017, 148, 10–17. [Google Scholar] [CrossRef]
- Unamuno, E.; Barrena, J.A. Hybrid AC/DC microgrids—Part II: Review and classification of control strategies. Renew. Sustain. Energy Rev. 2015, 52, 1123–1134. [Google Scholar] [CrossRef]
- Liu, X.; Wang, P.; Loh, P.C. A Hybrid AC/DC Microgrid and Coordination Control. IEEE Trans. Smart Grid 2013, 2, 278–286. [Google Scholar]
- Nejabatkhah, F.; Li, Y.W. Overview of Power Management Strategies of Hybrid AC/DC Microgrid. IEEE Trans. Power Electron. 2015, 30, 7072–7089. [Google Scholar] [CrossRef]
- Liu, X.; Wang, P.; Loh, P.C. A hybrid AC/DC micro-grid. In Proceedings of the IPEC Conference Proceedings, Singapore, 27–29 October 2010; pp. 746–751. [Google Scholar]
- Wang, P.; Liu, X.; Jin, C.; Loh, P.; Choo, F. A hybrid AC/DC micro-grid architecture, operation and control. In Proceedings of the IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–29 July 2011; pp. 1–8. [Google Scholar]
- Josep Guerrero, J.V. Hierarchical Control of Droop-Controlled AC and DC Microgrids. A General Approach toward Standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Poh Chiang Loh, S.M. Autonomous Control of Interlinking Converter with Energy Storage in Hybrid AC-DC Microgrid. IEEE Trans. Ind. Appl. 2013, 49, 1374–1376. [Google Scholar]
- De Brabandere, K.; Bolsens, B.; van den Keybus, J.; Woyte, A.; Driesen, J.; Belmans, R. A Voltage and Frequency Droop Control Method for Parallel Inverters. IEEE Trans. Power Electron. 2007, 22, 1107–1115. [Google Scholar] [CrossRef]
- Loh, P.C.; Li, D.; Chai, Y.K.; Blaabjerg, F. Autonomous Operation of Hybrid Microgrid with AC and DC Subgrids. IEEE Trans. Power Electron. 2013, 28, 2214–2223. [Google Scholar] [CrossRef]
- Aryani, D.R.; Kim, J.-S.; Song, H. Interlink Converter with Linear Quadratic Regulator Based Current Control for Hybrid AC/DC Microgrid. Energies 2017, 10, 1799. [Google Scholar] [CrossRef]
- Luo, F.; Loo, K.H.; Lai, Y.M. A hybrid AC/DC microgrid control scheme with voltage-source inverter-controlled interlinking converters. In Proceedings of the 2016 18th European Conference on Power Electronics and Applications (EPE’16 ECCE Europe), Karlsruhe, Germany, 5–8 September 2016; pp. 1–8. [Google Scholar]
- Karimi, Y.; Guerrero, J.M.; Oraee, H. Decentralized method for load sharing and power management in a hybrid single/three-phase islanded microgrid consisting of hybrid source PV/battery units. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–8. [Google Scholar]
- Hasan, M.A.; Vemula, N.K.; Parida, S.K. Cost based dynamic load dispatch for an autonomous parallel converter hybrid AC-DC microgrid. In Proceedings of the National Power Systems Conference (NPSC), Bhubaneswar, India, 19–21 December 2016; pp. 1–5. [Google Scholar]
- Yue, J.; Hu, Z.; Li, C.; Vasquez, J.C.; Guerrero, J.M. Economic Power Schedule and Transactive Energy through an Intelligent Centralized Energy Management System for a DC Residential Distribution System. Energies 2017, 10, 916. [Google Scholar] [CrossRef]
- Gao, L.; Liu, Y.; Ren, H.; Guerrero, J.M. A DC Microgrid Coordinated Control Strategy Based on Integrator Current-Sharing. Energies 2017, 10, 1116. [Google Scholar] [CrossRef]
- Kaur, A.; Kaushal, J.; Basak, P. A review on microgrid central controller. Renew. Sustain. Energy Rev. 2016, 55, 338–345. [Google Scholar] [CrossRef]
- Aluisio, B.; Cagnano, A.; de Tuglie, E.; Dicorato, M.; Forte, G.; Trovato, M. PrInCE lab microgrid: Early experimental results. In Proceedings of the 2016 AEIT International Annual Conference (AEIT), Capri, Italy, 5–7 October 2016; pp. 1–6. [Google Scholar]
- El-Hendawi, M.; Gabbar, H.A.; El-Saady, G.; Ibrahim, E.-N.A. Control and EMS of a Grid-Connected Microgrid with Economical Analysis. Energies 2018, 11, 129. [Google Scholar] [CrossRef]
- Dou, C.; Zhang, Z.; Yue, D.; Zheng, Y. MAS-Based Hierarchical Distributed Coordinate Control Strategy of Virtual Power Source Voltage in Low-Voltage Microgrid. IEEE Access 2017, 5, 11381–11390. [Google Scholar] [CrossRef]
- Baek, J.; Choi, W.; Chae, S. Distributed Control Strategy for Autonomous Operation of Hybrid AC/DC Microgrid. Energies 2017, 10, 373. [Google Scholar] [CrossRef]
- Tofis, Y.; Timotheou, S.; Kyriakides, E. Minimal Load Shedding Using the Swing Equation. IEEE Trans. Power Syst. 2017, 32, 2466–2467. [Google Scholar] [CrossRef]
- Choi, Y.; Lim, Y.; Kim, H.-M. Optimal Load Shedding for Maximizing Satisfaction in an Islanded Microgrid. Energies 2017, 10, 45. [Google Scholar] [CrossRef]
- Zhou, H.; Qiu, Y.; Lin, Y.; Wang, Z.; Ma, J. Remote automatic switching and load shedding linkage control scheme. In Proceedings of the 2016 IEEE International Conference on Power and Renewable Energy (ICPRE), Shanghai, China, 21–23 October 2016; pp. 260–263. [Google Scholar]
- Grantham, A.; Pudney, P.; Ward, L.A.; Whaley, D.; Boland, J. The viability of electrical energy storage for low-energy households. Sol. Energy 2017, 155, 1216–1224. [Google Scholar] [CrossRef]
- Leadbetter, J.; Swan, L. Battery storage system for residential electricity peak demand shaving. Energy Build. 2012, 55, 685–692. [Google Scholar] [CrossRef]
- Ciobotaru, M.; Agelidis, V.G.; Teodorescu, R.; Blaabjerg, F. Accurate and less-disturbing active antiislanding method based on PLL for gridconnected converters. IEEE Trans. Power Electron. 2010, 25, 1576–1584. [Google Scholar] [CrossRef]
- Faxas-Guzmán, J.; García-Valverde, R.; Serrano-Luján, L.; Urbina, A. Priority load control algorithm for optimal energy management in stand-alone photovoltaic systems. Renew. Energy 2014, 68, 156–162. [Google Scholar] [CrossRef]
- PSIM10.0, PowerSim: Rockville, MD, USA, 2016.
- Patrao, I.; González-Medina, R.; Marzal, S.; Garcerá, G.; Figueres, E. Synchronization of Power Inverters in Islanded Microgrids Using an FM-Modulated Signal. IEEE Trans. Smart Grid 2017, 8, 503–510. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Communication Parameters between the Devices of the Microgrid (MG) and the Microgrid Central Processor (MGCP) | |||||||
| DC MG | AC MG | ||||||
| Operations functions | ESS | ILC | PV | DC Load | DGs | AC Load | |
| VDC_ref IDis_ref ICh_ref VC | φ ω VDC_ref | PPV_Lim | Sw1 Sw2 Sw3 Sw4 | ||||
| Measurements | IBat VDC VBat SOC | IILC_AC VDC VGrid | IPV1 VPV1 IPV2 VPV2 | IDC_Load | IAC_DGs VGrid | IAC_Load VGrid | |
| Communication Parameters between the MGCP and the Grid Operator | |||||||
| High-level control | EDL, , | ||||||
| ILC | 2 PV DC/DC Converters (DGs) | ESS |
|---|---|---|
| PILC_Rated = 10 kW VGrid = 230 V FGrid = 50 Hz VDC = 420 V FswILC = 12.8 kHz | PPV1,2_Boost = 5 kW VPV = 306 V Fsw_PV = 16 kHz PV Panel: Atersa A-250P GSE VPV_oc = 37.61 V IPV_MAX = 8.18 A VPV_MAX = 30.58 V IPV_CC = 8.71 A | PESS_HB = 3 kW VBat = 216 V Fsw_ESS = 16 kHz Battery Bank: 18 batteries type SUN POWER VRM 12V105 connected in series VBat_Nom = 216 V VBat_MIN = 185 V VBat_MAX = 259.2 V C10 ≅ 105 A·h IC10 = 10.5 A |
| SIMULATION Scenarios | |||||||
|---|---|---|---|---|---|---|---|
| Time Intervals (s) | |||||||
| Time interval number | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Time span (s) | 0 < t < 1 | 1 < t < 10 | 10 < t < 18 | 18 < t < 20 | 20 < t < 28 | 28 < t < 35 | 35 < t < 40 |
| Irradiation (W/m2) | 300 | 600 | 400 | 800 | 800 | 800 | 100 |
| Load connected to the DC bus | 4 loads (8 kW) | 4 loads (8 kW) | 4 loads (8 kW) | 4 loads (8 kW) | 2 loads (4 kW) | 2 loads (4 kW) | 2 loads (4 kW) |
| EDL (1) | On | On | On | On | On | Off | Off |
| ILC | The MG is operating in grid-connection mode | ||||||
| ESS | The batteries of the ESS are initially discharged. SOC ≤ SOCMIN | ||||||
| Power limits | = 4 kW, = 1 kW, = 8 kW | ||||||
| AC bus | , | ||||||
| Experimental Scenarios 1 | |||||
|---|---|---|---|---|---|
| ESS | Experiment 1: The batteries of the ESS are initially charged. SOC = SOCMAX | ||||
| Time span (s) | 0 < t < 8 | 8 < t < 11 | 11 < t < 41 | 41 < t < 44 | 44 < t < 50 |
| Irradiation (W/m2) | 100 | 100–800 | 800 | 800–100 | 100 |
| ESS | Experiment 2: The batteries of the ESS are initially discharged. SOC ≤ SOCMIN | ||||
| Time span (s) | 0 < t < 7 | 7 < t < 10 | 10 < t < 40 | 40 < t < 43 | 43 < t < 50 |
| Irradiation (W/m2) | 100 | 100–800 | 800 | 800–100 | 100 |
| Load connected to the DC bus | 4 loads (2.4 kW) | ||||
| EDL | On | ||||
| ILC | The MG is operating in grid-connection mode | ||||
| Power limits | = 4 kW, = 1 kW, = 2.4 kW | ||||
| AC bus | , | ||||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Salas-Puente, R.A.; Marzal, S.; González-Medina, R.; Figueres, E.; Garcera, G. Power Management of the DC Bus Connected Converters in a Hybrid AC/DC Microgrid Tied to the Main Grid. Energies 2018, 11, 794. https://doi.org/10.3390/en11040794
Salas-Puente RA, Marzal S, González-Medina R, Figueres E, Garcera G. Power Management of the DC Bus Connected Converters in a Hybrid AC/DC Microgrid Tied to the Main Grid. Energies. 2018; 11(4):794. https://doi.org/10.3390/en11040794
Chicago/Turabian StyleSalas-Puente, Robert Antonio, Silvia Marzal, Raúl González-Medina, Emilio Figueres, and Gabriel Garcera. 2018. "Power Management of the DC Bus Connected Converters in a Hybrid AC/DC Microgrid Tied to the Main Grid" Energies 11, no. 4: 794. https://doi.org/10.3390/en11040794