Proposals for Enhancing Frequency Control in Weak and Isolated Power Systems: Application to the Wind-Diesel Power System of San Cristobal Island-Ecuador



Abstract
:1. Introduction
2. Power System under Study
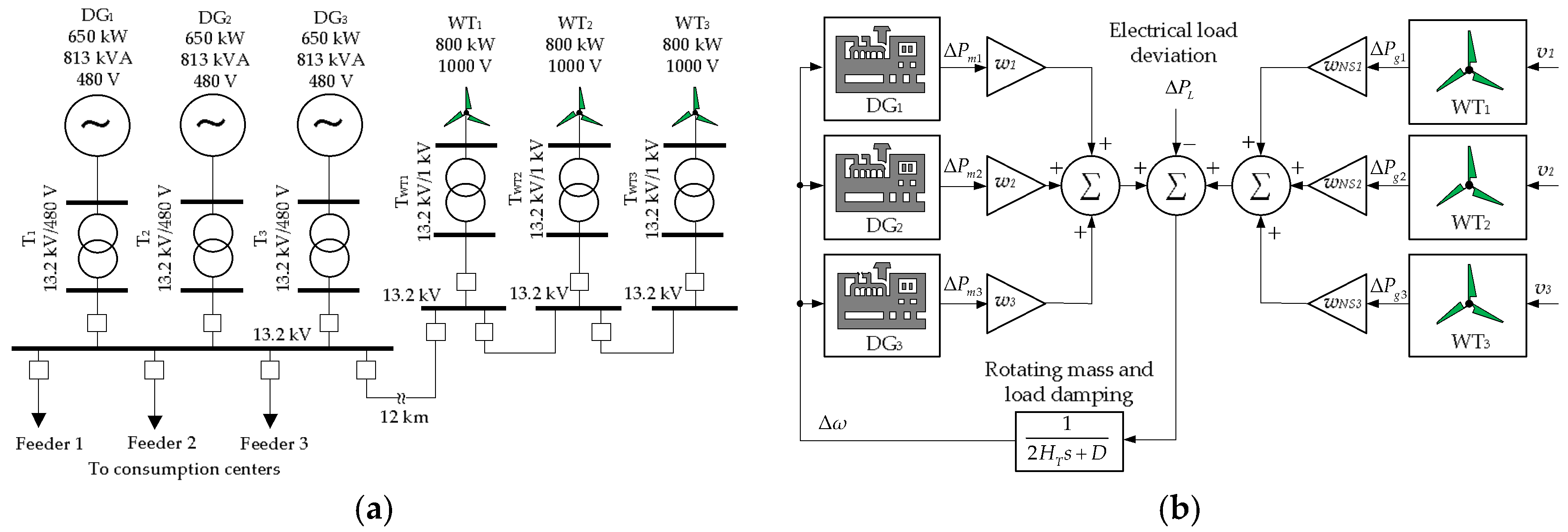
2.1. Description and Modeling
2.2. Operation and Control
2.3. Simulation of the SCHPS under Normal Conditions
- First control criterion:
- Second control criterion:
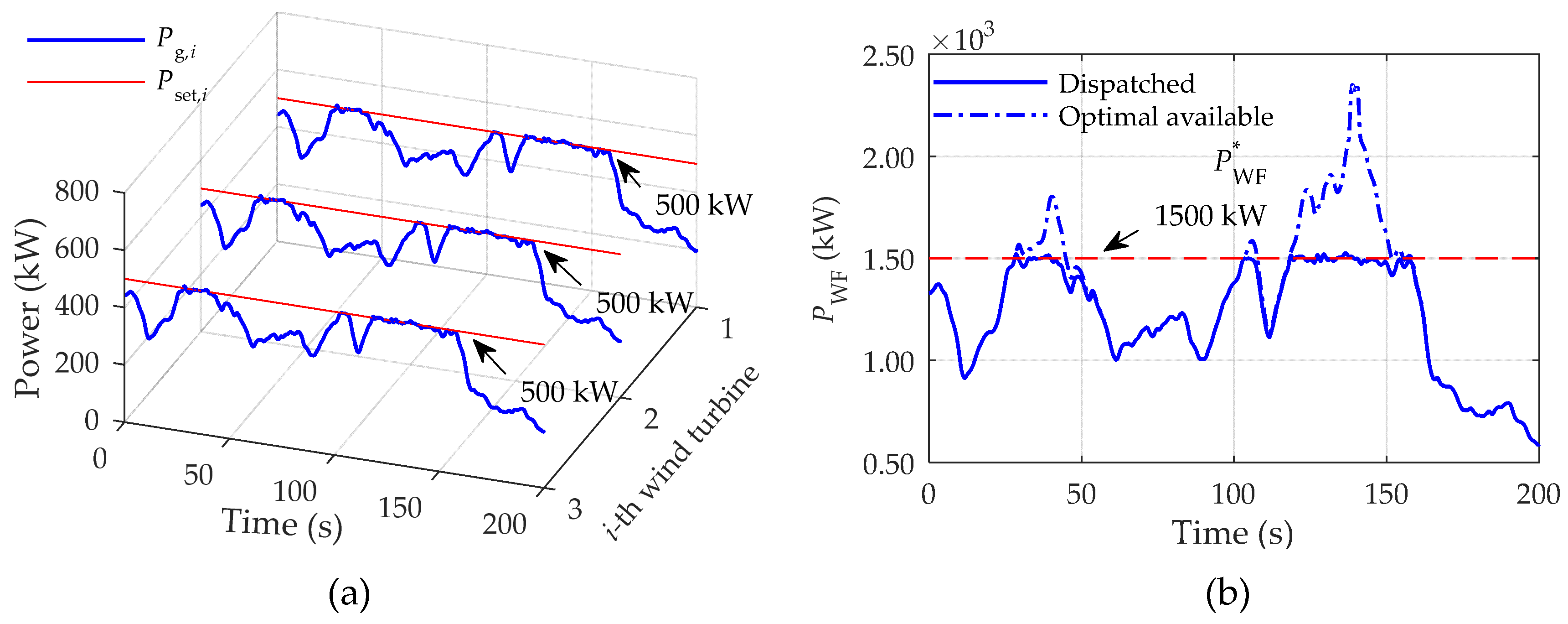
- WFC active power set-point:
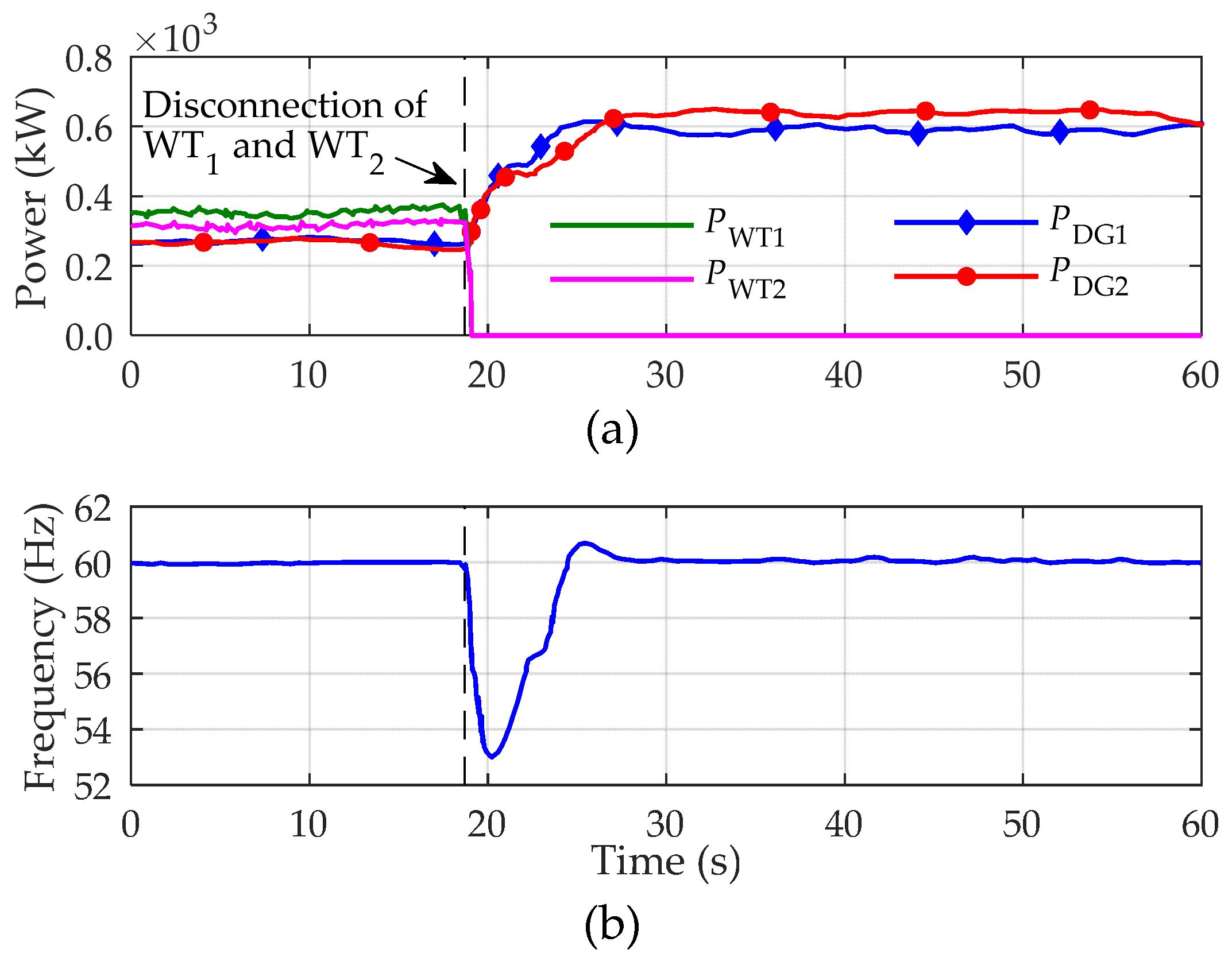
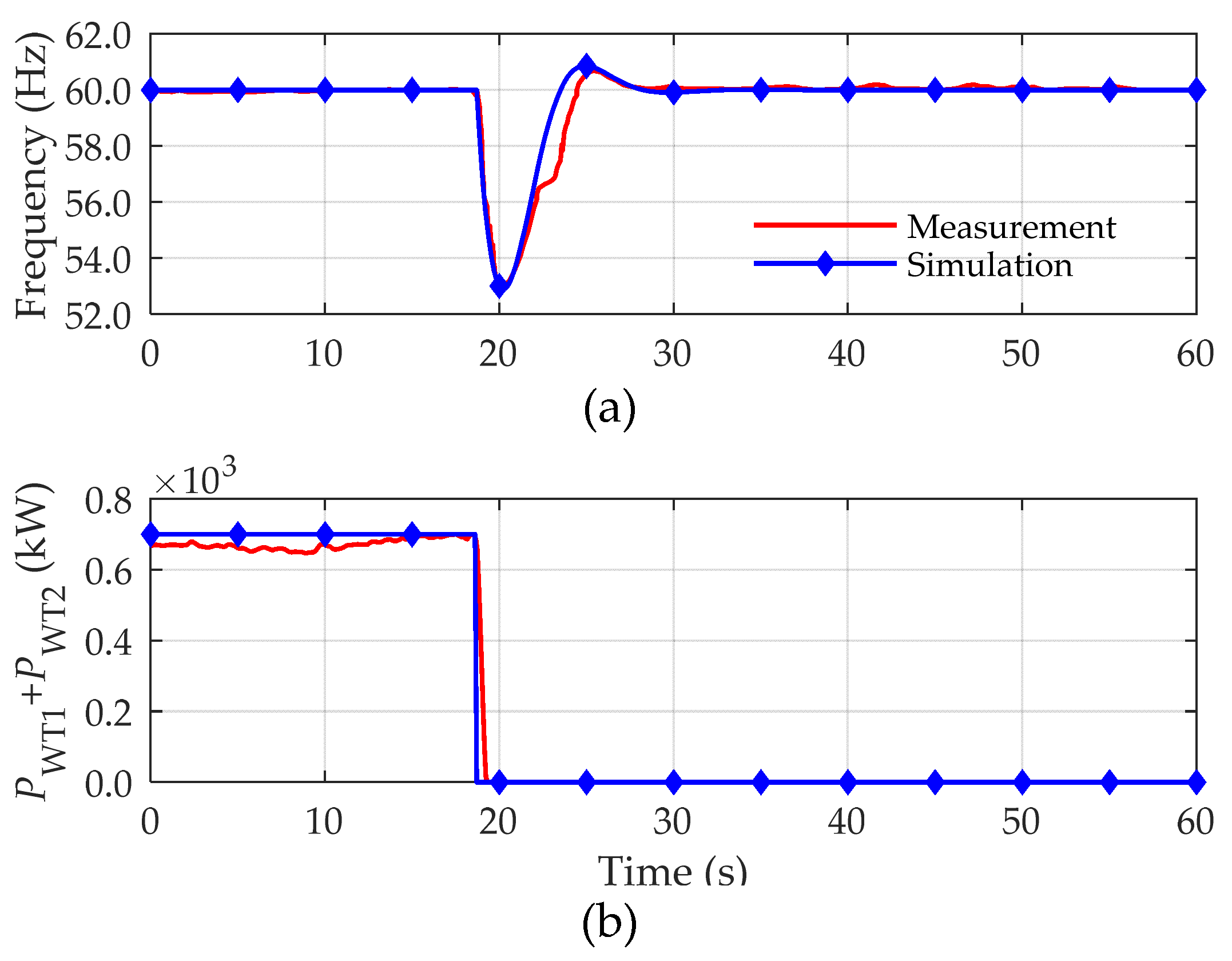
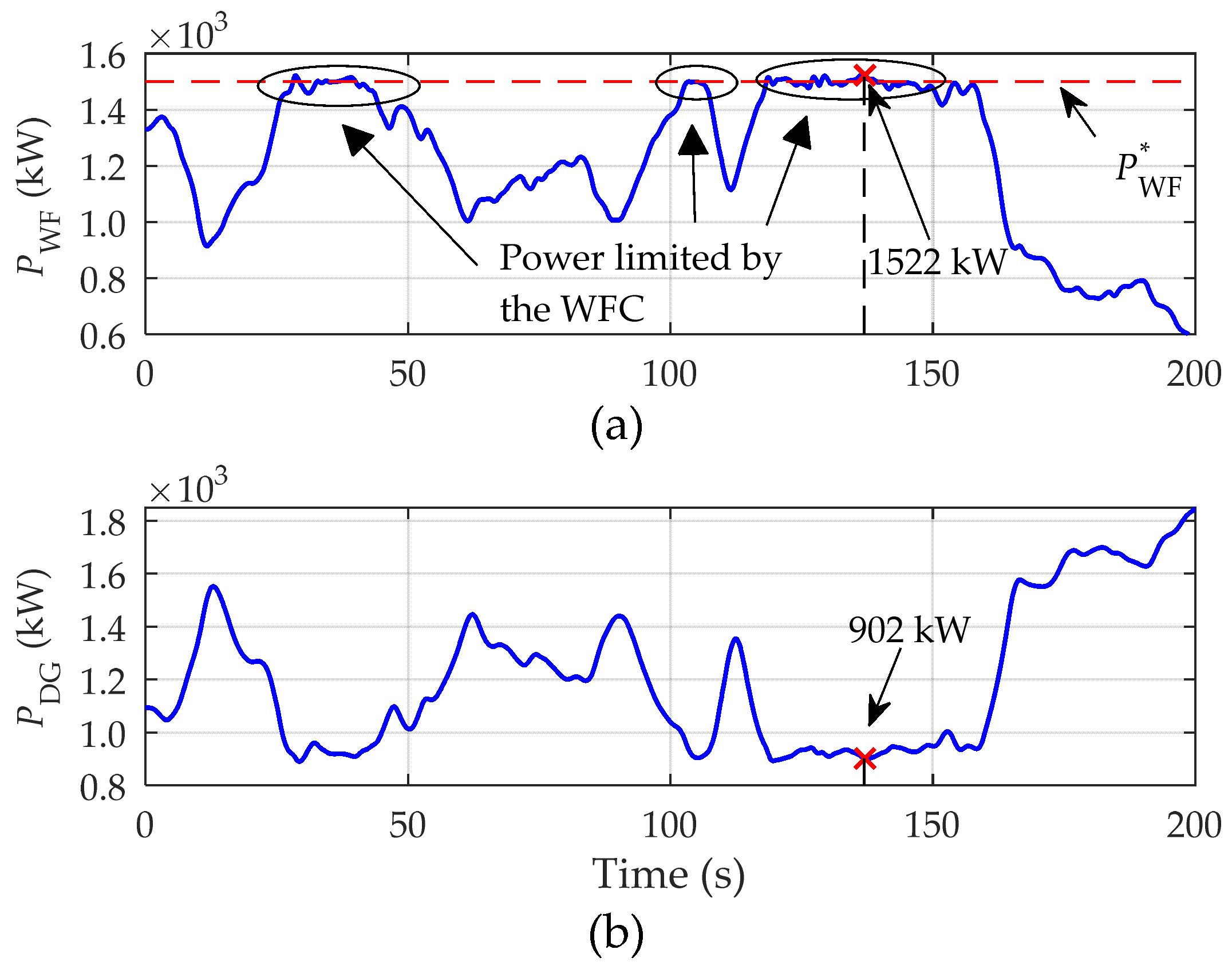
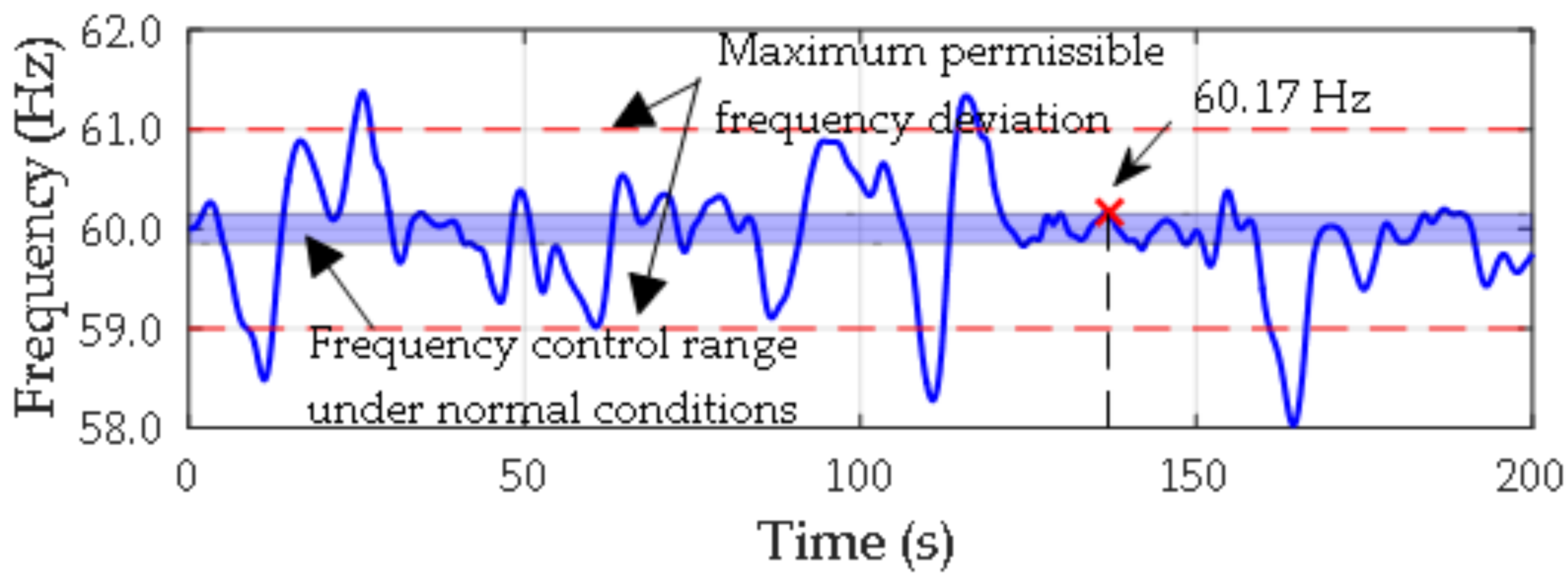
2.4. Analysis of the Results and Problem Statement
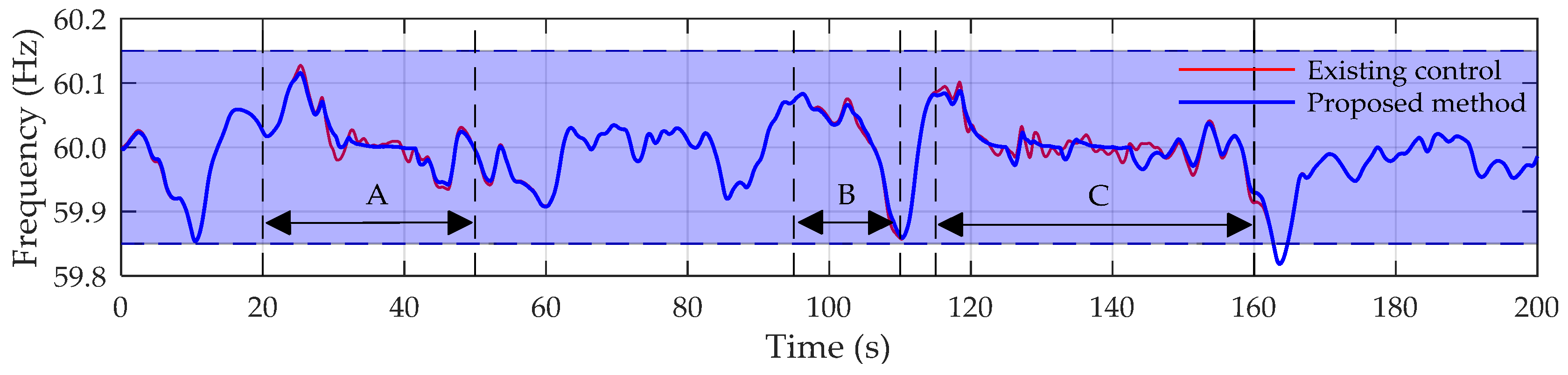
3. Proposals to Enhance the Power System Frequency Control under Normal Conditions
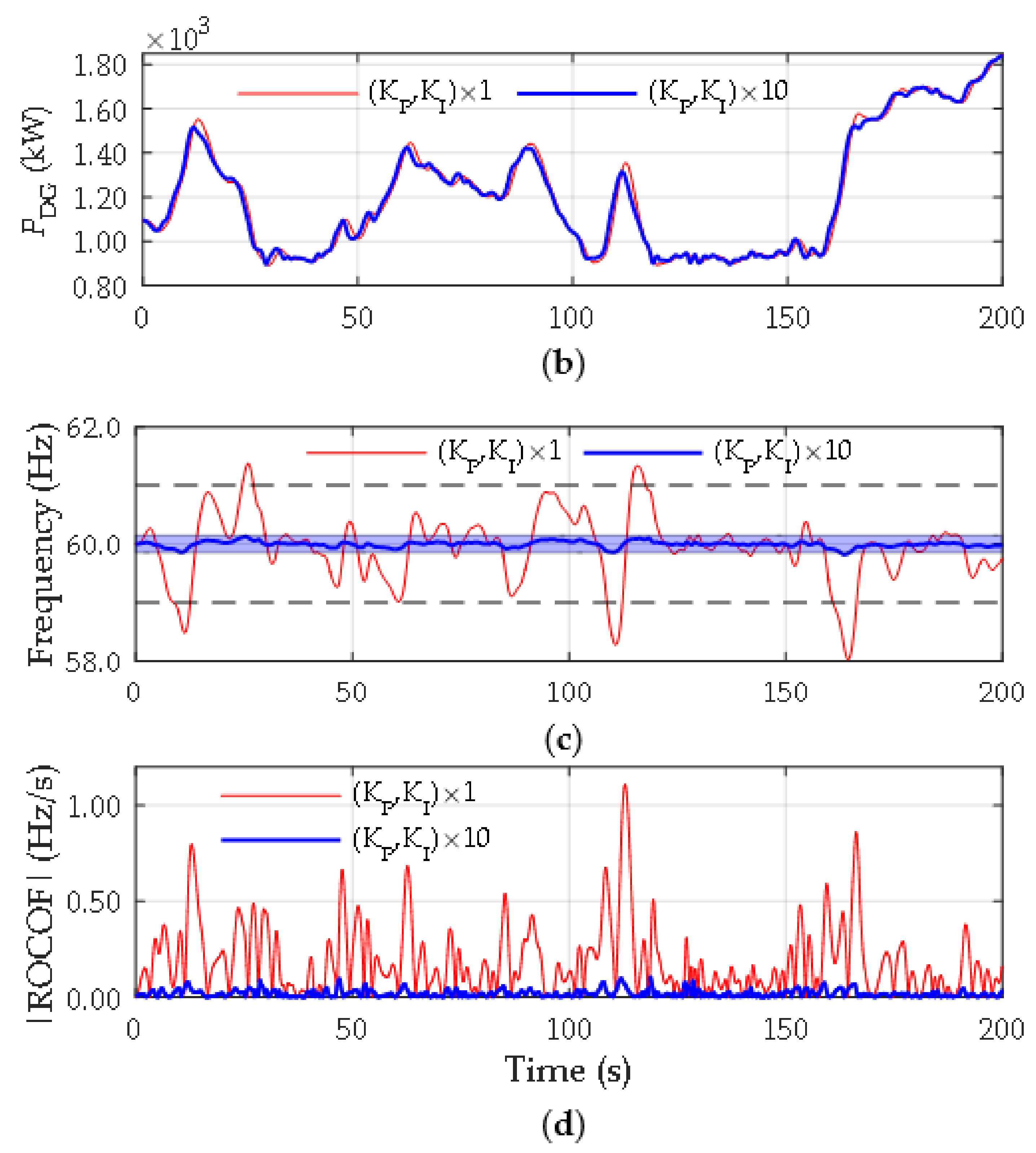
3.1. Adjustment of the Control Gains of the Diesel-Engine Speed Governor
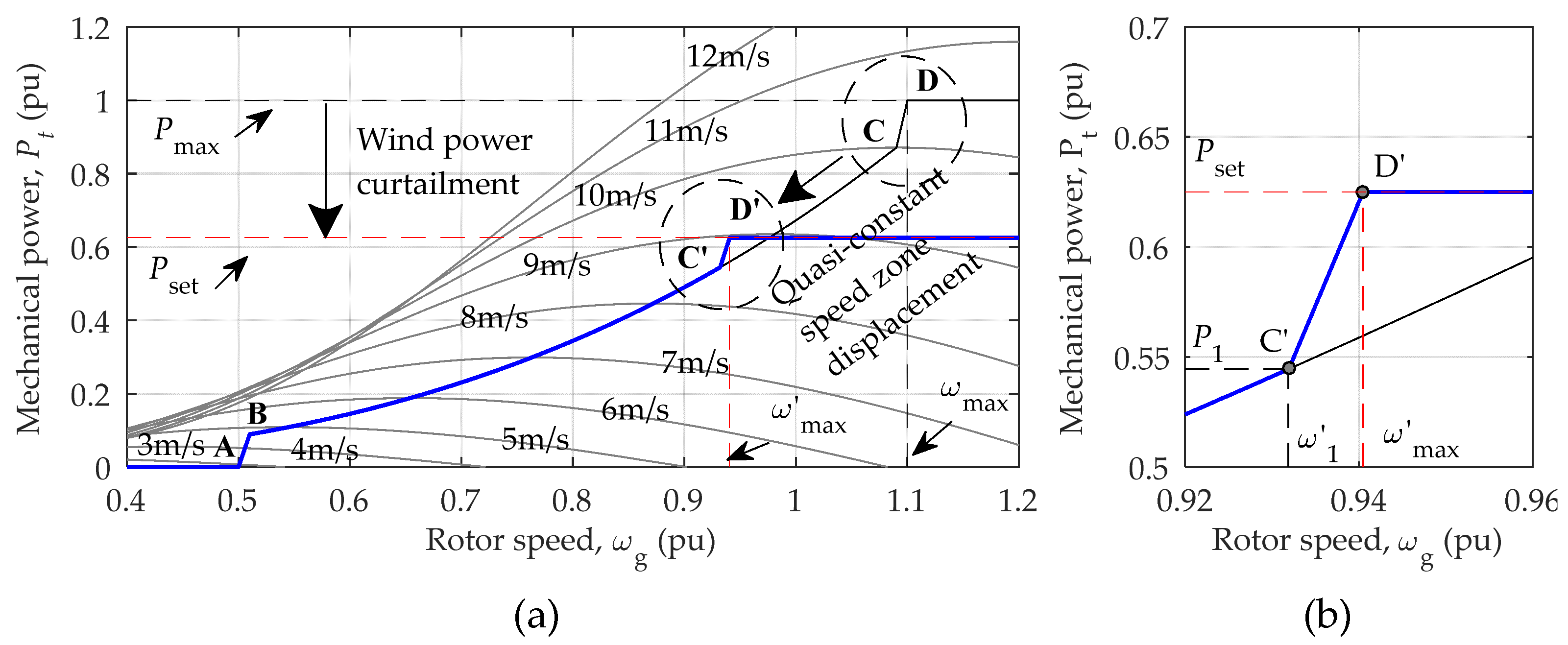
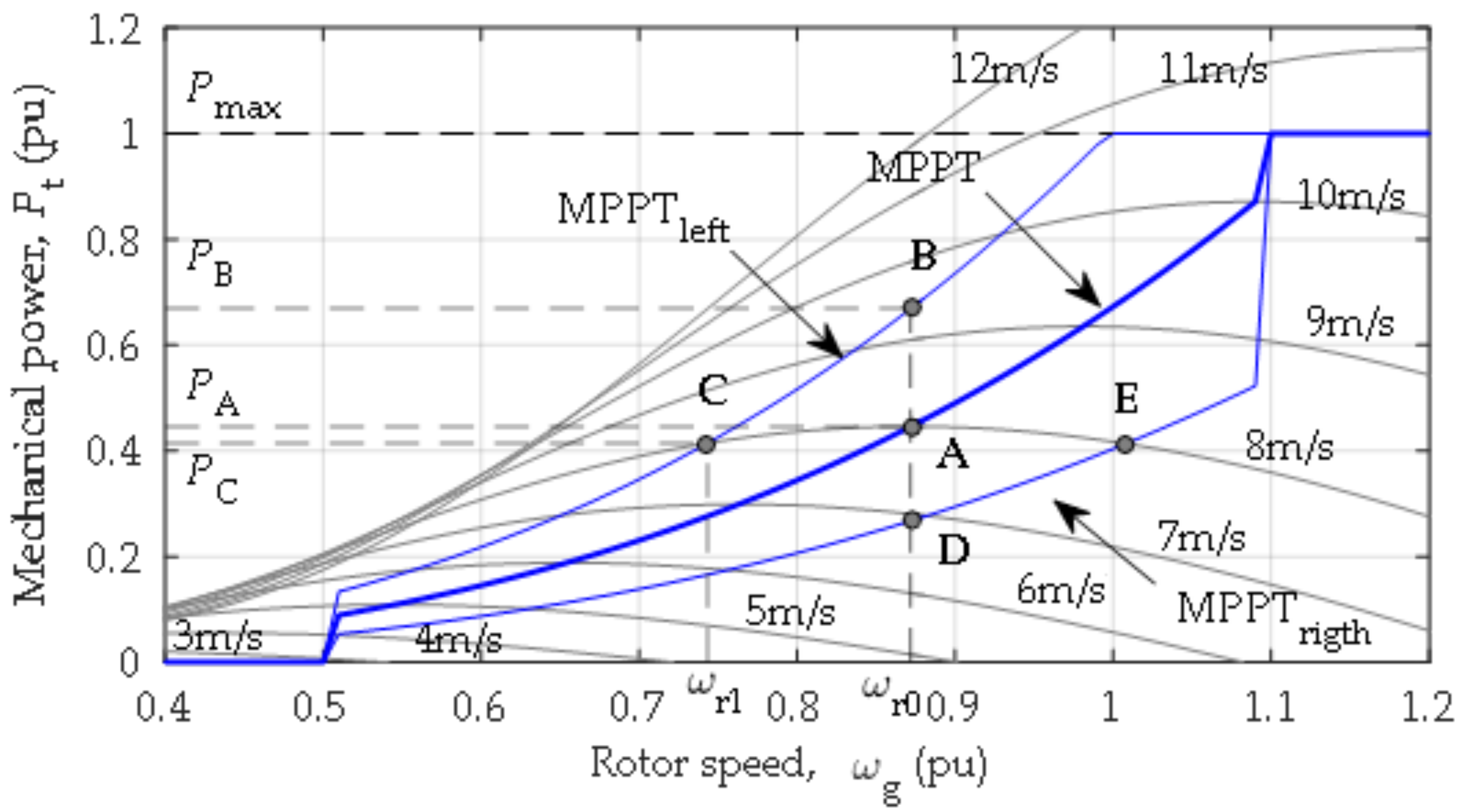
3.2. Improvement of the Wind Power Curtailment Strategy
3.3. Inertial Control Strategy Applied to the Wind Turbines
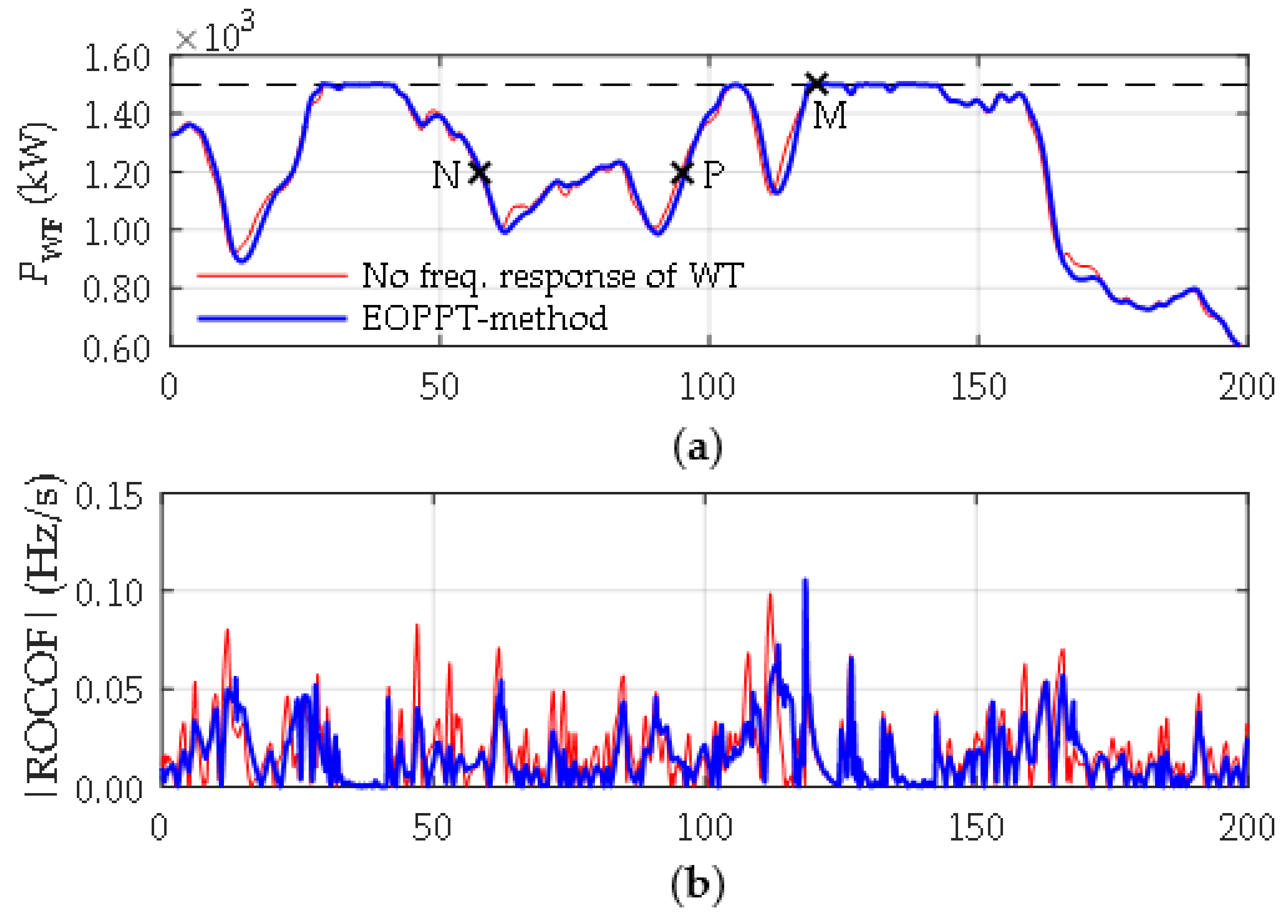
4. Assessment of the Improvement Proposals under Contingency Conditions
- Case P: Tripping of WT3 when the incoming wind speed is increasing (dv/dt > 0)
- Case N: Tripping of WT3 when the incoming wind speed is decreasing (dv/dt < 0)
- Case M: Tripping of WT3 under highly favorable wind conditions (Curtailment)
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
- A.
- Diesel-engine speed governor parameters: T1 = 0.024 s, T2 = 0.1 s, T3 = 0.01 s, Tmax = 1.1 pu, Tmin = 0 pu, KP = 2.294, KI = 1.458.
- B.
- Variable-speed wind turbine parameters:

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Rated power (base power) | Pbase | 800 kW |
| Max./Min. active power | Pg,max/Pg,min | 1/0.04 pu |
| Max./Min. electromagnetic torque | Tem.max/Tem.min | 0.91/0.08 pu |
| Base wind speed | vbase | 10 m/s |
| Active power at vbase | Pv(base) | 697 kW |
| Generator pole pairs number | p | 2 |
| Generator nominal frequency | fg,nom | 50 Hz |
| Base speed of the turbine | ωt,base | 2.37 rad/s |
| Base speed of the generator | ωg,base | 157.08 rad/s |
| Gearbox speed ratio | nt | 66.185 |
| Air density | ρ | 1.225 kg/m3 |
| Radius of the rotor | R | 29.5 m |
| Equivalent constant of inertia | Heq | 4.18 s |
| Optimization constant | Kopt | 0.6728 |
| Min./Max. blade pitch angle | βmin/βmax | 0/88° |
| Maximum blade pitch angle rate | (dβ/dt)max | 10°/s |
| Generator and converter time constant | τC | 20 ms |
| Blade pitch servo time constant | τP | 0.3 s |
| Pitch controller gains | KPpc/KIpc | 150/25 |
| Speed controller gains | KPsc/KIsc | 0.3/8 |
- C.
- MPPT curve parameters: ωmin = 0.5 pu, ω0 = 0.51 pu, ω1 = 1.09 pu, ωmax = 1.1 pu.
- D.
- E.
- Extended OPPT method parameters: Dead band = 1 mHz, kvir = 4, fKopt,max = 1.6, fKopt,min = 0.4, Two = 10 s, Tlp = 0.8 s.
References
- Lu, J.; Wang, W.; Zhang, Y.; Cheng, S. Multi-Objective Optimal Design of Stand-Alone Hybrid Energy System Using Entropy Weight Method Based on HOMER. Energies 2017, 10, 1664. [Google Scholar] [CrossRef]
- Martínez-Lucas, G.; Sarasúa, J.; Sánchez-Fernández, J. Frequency Regulation of a Hybrid Wind–Hydro Power Plant in an Isolated Power System. Energies 2018, 11, 239. [Google Scholar] [CrossRef]
- Kies, A.; Schyska, B.; von Bremen, L. Curtailment in a Highly Renewable Power System and Its Effect on Capacity Factors. Energies 2016, 9, 510. [Google Scholar] [CrossRef]
- Bird, L.; Lew, D.; Milligan, M.; Carlini, E.M.; Estanqueiro, A.; Flynn, D.; Gomez-Lazaro, E.; Holttinen, H.; Menemenlis, N.; Orths, A.; et al. Wind and solar energy curtailment: A review of international experience. Renew. Sustain. Energy Rev. 2016, 65, 577–586. [Google Scholar] [CrossRef]
- Al-Sarray, M.; McCann, R.A. Control of an SSSC for oscillation damping of power systems with wind turbine generators. In Proceedings of the 2017 IEEE Power Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 23–26 April 2017; pp. 1–5. [Google Scholar]
- Kim, C.; Muljadi, E.; Chung, C. Coordinated Control of Wind Turbine and Energy Storage System for Reducing Wind Power Fluctuation. Energies 2017, 11, 52. [Google Scholar] [CrossRef]
- Dou, X.; Quan, X.; Wu, Z.; Hu, M.; Sun, J.; Yang, K.; Xu, M. Improved Control Strategy for Microgrid Ultracapacitor Energy Storage Systems. Energies 2014, 7, 8095–8115. [Google Scholar] [CrossRef]
- Diaz-Gonzalez, F.; Bianchi, F.D.; Sumper, A.; Gomis-Bellmunt, O. Control of a Flywheel Energy Storage System for Power Smoothing in Wind Power Plants. IEEE Trans. Energy Convers. 2014, 29, 204–214. [Google Scholar] [CrossRef]
- Lotfy, M.E.; Senjyu, T.; Farahat, M.A.-F.; Abdel-Gawad, A.F.; Yona, A. A Frequency Control Approach for Hybrid Power System Using Multi-Objective Optimization. Energies 2017, 10, 80. [Google Scholar] [CrossRef]
- Ren, G.; Liu, J.; Wan, J.; Guo, Y.; Yu, D. Overview of wind power intermittency: Impacts, measurements, and mitigation solutions. Appl. Energy 2017, 204, 47–65. [Google Scholar] [CrossRef]
- Ma, H.; Wang, B.; Gao, W.; Liu, D.; Sun, Y.; Liu, Z. Optimal Scheduling of an Regional Integrated Energy System with Energy Storage Systems for Service Regulation. Energies 2018, 11, 195. [Google Scholar] [CrossRef]
- Ochoa, D.; Martinez, S. Fast-Frequency Response Provided by DFIG-Wind Turbines and its Impact on the Grid. IEEE Trans. Power Syst. 2017, 32, 4002–4011. [Google Scholar] [CrossRef]
- Naik, K.A.; Gupta, C.P. Output Power Smoothing and Voltage Regulation of a Fixed Speed Wind Generator in the Partial Load Region Using STATCOM and a Pitch Angle Controller. Energies 2017, 11, 58. [Google Scholar] [CrossRef]
- Kerdphol, T.; Rahman, F.S.; Mitani, Y.; Hongesombut, K.; Küfeoğlu, S. Virtual Inertia Control-Based Model Predictive Control for Microgrid Frequency Stabilization Considering High Renewable Energy Integration. Sustainability 2017, 9, 773. [Google Scholar] [CrossRef]
- Lee, H.; Hwang, M.; Muljadi, E.; Sørensen, P.; Kang, Y.C. Power-Smoothing Scheme of a DFIG Using the Adaptive Gain Depending on the Rotor Speed and Frequency Deviation. Energies 2017, 10, 555. [Google Scholar] [CrossRef]
- Ma, S.; Geng, H.; Yang, G.; Pal, B.C. Clustering based Coordinated Control of Large Scale Wind Farm for Power System Frequency Support. IEEE Trans. Sustain. Energy 2018, 1. [Google Scholar] [CrossRef]
- Raoofsheibani, D.; Abbasi, E.; Pfeiffer, K. Provision of primary control reserve by DFIG-based wind farms in compliance with ENTSO-E frequency grid codes. In Proceedings of the IEEE PES Innovative Smart Grid Technologies, Istanbul, Turkey, 12–15 October 2014; pp. 1–6. [Google Scholar]
- Bignucolo, F.; Cerretti, A.; Coppo, M.; Savio, A.; Turri, R. Effects of Energy Storage Systems Grid Code Requirements on Interface Protection Performances in Low Voltage Networks. Energies 2017, 10, 387. [Google Scholar] [CrossRef]
- Yuan, C.; Xie, P.; Yang, D.; Xiao, X. Transient Stability Analysis of Islanded AC Microgrids with a Significant Share of Virtual Synchronous Generators. Energies 2018, 11, 44. [Google Scholar] [CrossRef]
- Theubou, T.; Wamkeue, R.; Kamwa, I. Dynamic model of diesel generator set for hybrid wind-diesel small grids applications. In Proceedings of the 2012 25th IEEE Canadian Conference on Electrical Computer Engineering (CCECE), Montreal, QC, Canada, 29 April–2 May 2012; pp. 1–4. [Google Scholar]
- Yoo, J.I.; Kim, J.; Park, J.W. Converter control of PMSG wind turbine system for inertia-free stand-alone microgrid. In Proceedings of the 2016 IEEE Industry Applications Society Annual Meeting, Portland, OR, USA, 2–6 October 2016; pp. 1–8. [Google Scholar]
- Gonzalez-Longatt, F.; Bonfiglio, A.; Procopio, R.; Bogdanov, D. Practical limit of synthetic inertia in full converter wind turbine generators: Simulation approach. In Proceedings of the 2016 19th International Symposium on Electrical Apparatus and Technologies (SIELA), Bourgas, Bulgaria, 29 May–1 June 2016; pp. 1–5. [Google Scholar]
- Ochoa, D.; Martinez, S. A Simplified Electro-Mechanical Model of a DFIG-based Wind Turbine for Primary Frequency Control Studies. IEEE Lat. Am. Trans. 2016, 14, 3614–3620. [Google Scholar] [CrossRef]
- Proyecto Eólico Isla San Cristóbal—Galápagos 2003–2016. Available online: https://www.globalelectricity.org/content/uploads/Galapagos-Report-2016-Spanish.pdf (accessed on 11 April 2018).
- Agencia de Regulación y Control de Electricidad. Procedimientos de Despacho y Operación. Available online: http://www.regulacionelectrica.gob.ec/wp-content/uploads/downloads/2015/10/ProcedimientosDespacho.pdf (accessed on 13 February 2018).
- Natori, K. A design method of time-delay systems with communication disturbance observer by using Pade approximation. In Proceedings of the 2012 12th IEEE International Workshop on Advanced Motion Control (AMC), Sarajevo, Bosnia and Herzegovina, 25–27 March 2012; pp. 1–6. [Google Scholar]
- Junior, C.R.S.; Lima, F.K.A. Wind Turbine and PMSG Dynamic Modelling in PSIM. IEEE Lat. Am. Trans. 2016, 14, 4115–4120. [Google Scholar] [CrossRef]

























| Wind Turbine | Diesel-GENSET | ||
|---|---|---|---|
| Model | MADE A-59 | Model | CAT-3512 DITA |
| Type | IV-Full converter | Type | - |
| Rated power | 800 kW | Rated power | 650 kW |
| Generator speed range | 750–1650 RPM | Capacity | 813 kVA |
| Gearbox ratio | 1:66.185 | Output voltage | 480 V ± 5% |
| Synchronous speed | 1500 RPM | Frequency | 60 Hz |
| Converter output voltage | 1000 V ± 10% | Synchronous speed | 1200 RPM |
| Converter output frequency | 60 Hz | Equivalent constant of inertia (base 3 × 813 kVA) | 0.4208 s |
| Inertial Characteristics of Power System | |
|---|---|
| HT | D |
| 2 × 0.4208 s | 0.5 pu |
| Pre-Disturbance Values | |
| Wind | Diesel |
| Pg1(0) = 370 kW (v1 = 8.1 m/s) | Pm1(0) = 240 kW |
| Pg2(0) = 330 kW (v2 = 7.8 m/s) | Pm2(0) = 260 kW |
| Magnitude | Wind | Diesel | ||||
|---|---|---|---|---|---|---|
| WT1 | WT2 | WT3 | DG1 | DG2 | DG3 | |
| Wind speed (m/s) | 10.0 | 10.9 | 11.2 | - | - | - |
| Active power (kW) | 508 | 508 | 575 | 319 | 239 | 275 |
| Total power (kW) | 1591 | 833 | ||||
| Demand covering (%) | 65.65 | 34.35 | ||||
| Primary Feeder Number | 1 | 2 | 3 | TOTAL |
|---|---|---|---|---|
| Active power (kW) | 1072 | 1045 | 307 | 2424.00 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ochoa, D.; Martinez, S. Proposals for Enhancing Frequency Control in Weak and Isolated Power Systems: Application to the Wind-Diesel Power System of San Cristobal Island-Ecuador. Energies 2018, 11, 910. https://doi.org/10.3390/en11040910
Ochoa D, Martinez S. Proposals for Enhancing Frequency Control in Weak and Isolated Power Systems: Application to the Wind-Diesel Power System of San Cristobal Island-Ecuador. Energies. 2018; 11(4):910. https://doi.org/10.3390/en11040910
Chicago/Turabian StyleOchoa, Danny, and Sergio Martinez. 2018. "Proposals for Enhancing Frequency Control in Weak and Isolated Power Systems: Application to the Wind-Diesel Power System of San Cristobal Island-Ecuador" Energies 11, no. 4: 910. https://doi.org/10.3390/en11040910
APA StyleOchoa, D., & Martinez, S. (2018). Proposals for Enhancing Frequency Control in Weak and Isolated Power Systems: Application to the Wind-Diesel Power System of San Cristobal Island-Ecuador. Energies, 11(4), 910. https://doi.org/10.3390/en11040910