1. Introduction
Due to the growing number of vehicles over recent decades and the increase of clean energy demand, the energy dissipation of a vehicle on different parts has been investigated. Recently, regenerative shock absorber systems caught the attention of many researchers because of the capability to harvest dissipated energy, due to its feasibility and accessibility. The fuel energy consumption of a car was analysed by Lafarge, Cagin [
1] who stated that the fuel energy dissipated to drive the wheels accounts for up to 22.5% of the total fuel energy consumed, which ranks it the second following engine heat losses of 75.2%. In reality, the percentage of the dissipated fuel energy on driving the wheels is expected to increase as a result of the uneven or rough road surfaces.
Unlike the conventional shock absorber which reduces the vibration through viscous damping and converts the kinetic energy into heat energy dissipated, the regenerative shock absorber converts the kinetic energy mainly into electrical energy. This harvested electrical energy can be stored in the battery for later use. According to Zuo, Scully [
2], automobiles contribute 70% of the carbon monoxide, 45% of the nitrogen oxide and 34% of the hydrocarbon pollution throughout the United States. One of the benefits brought by the regenerative shock absorber is that it can extend the mileage of the vehicle by saving petroleum fuel or electrical energy to achieve a reduction in the greenhouse gas emission.
In addition, the regenerative shock absorber can operate as a part of the active suspension system in order to improve the ride and comfort performance [
3,
4,
5,
6,
7]. Proportional–integral–derivative control is commonly used in these applications for obtaining stable output power or reducing vibrations [
8,
9]. Based on the conservation of energy principle, better ride and comfort performance resulting from less kinetic energy or less vibration energy of the suspension system yields less amount of harvested energy. This contradiction can be overcome by adopting the control system which can make a compromise for both the energy harvesting and ride and comfort performances. One good concept proposed by Elliott and Zilletti [
10] was to utilize the electromagnetic transducer as either a shunt damper or an energy harvester. Therefore, the system can be switched between the different functionalities for desired performance output. It was also shown in their results that the coupling coefficient increased with the size of the electromagnetic transducer, meaning that the mechanism combining the shunt damper and energy harvester can operate well especially in the large-scale transducer such as a regenerative shock absorber.
The future trends of the regenerative shock absorber would be:
High power to weight ratio
Better mechanical-electrical energy conversion efficiency
High compatibility with the vehicle.
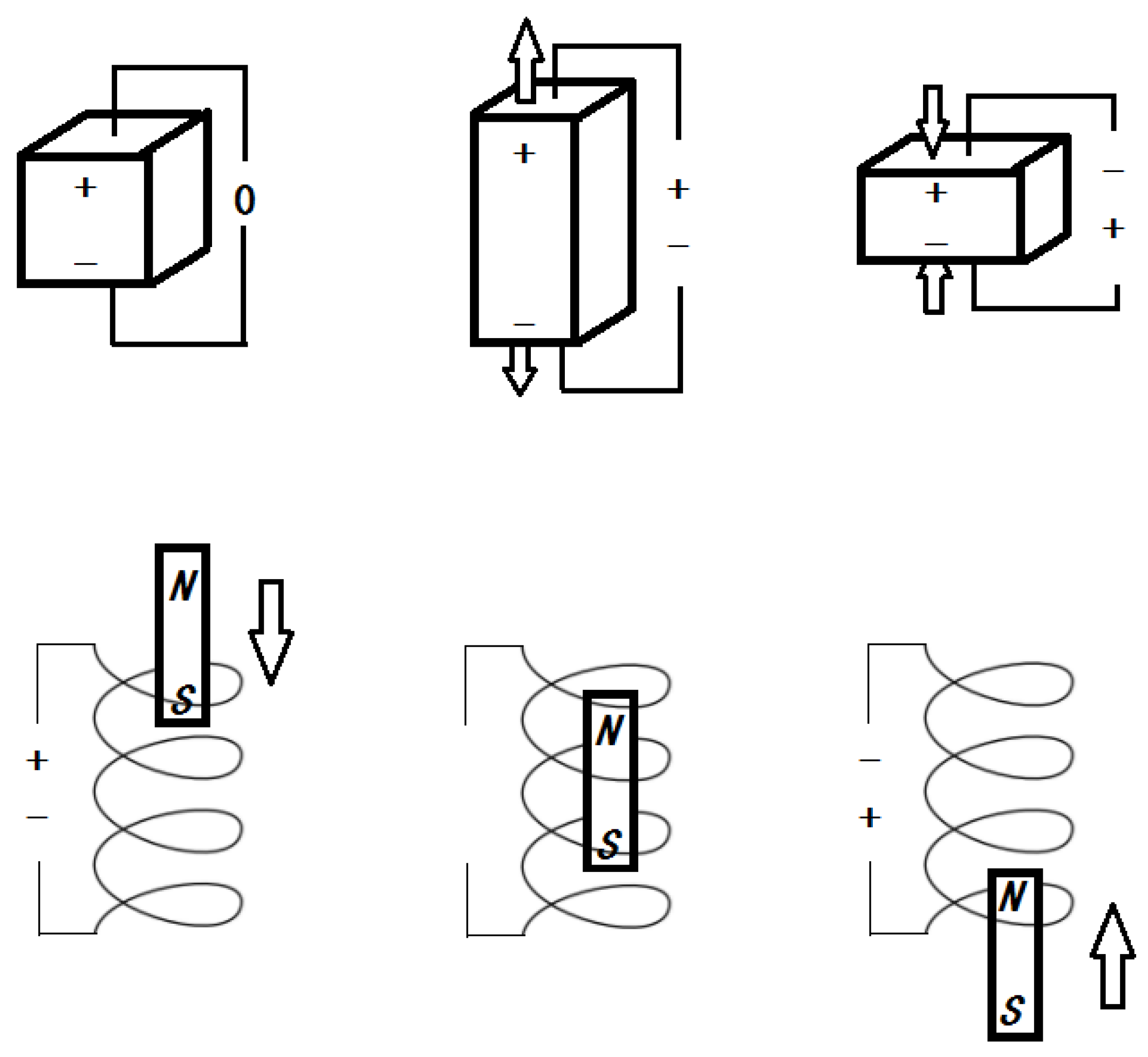
Among the methods in which the kinetic energy was converted into electrical energy, as shown in
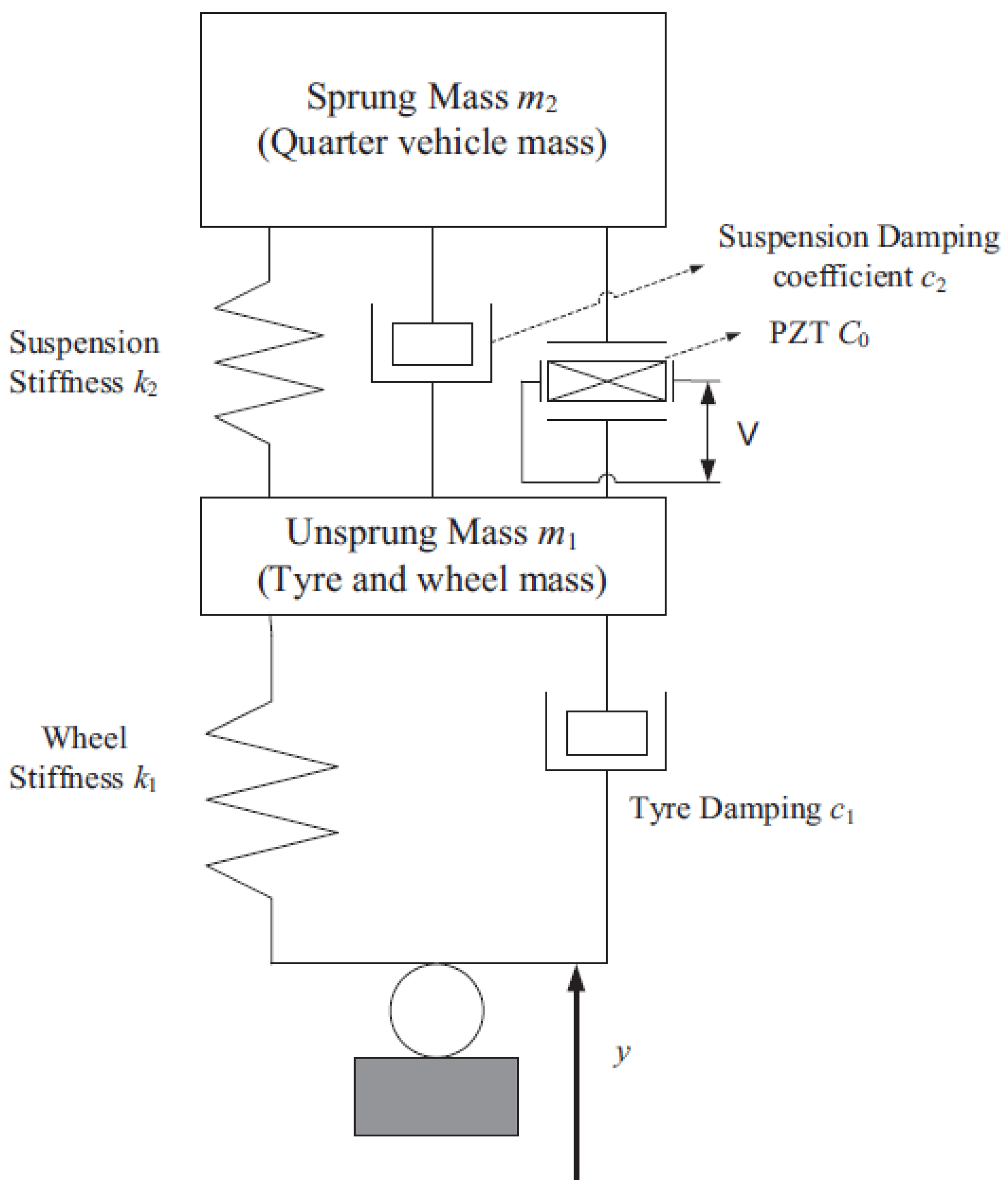
Figure 1, the use of the piezoelectric material and electromagnetic generator were frequently discussed because of their outstanding compatibilities and high efficiencies. Xiao, Wang [
11] discussed the feasibility of having the piezoelectric (PZT) generator in 2 degrees of freedom (2DOF) quarter vehicle suspension system as an additional energy harvesting element, as shown in
Figure 2. It was found that the improvement of the resonant power output of the 2DOF piezoelectric system only and largely depends on the cabin mass to tyre mass ratio and suspension stiffness to tyre stiffness ratio.
Lee, Jang [
12] combined the piezoelectric transducers with a shock absorber to generate electricity from the fluid pressure change induced by the piston displacement. Xie and Wang [
13] discussed the effect of the dimension of the piezoelectric plate, input velocity and road roughness. Piezoelectric transduction was better than electromagnetic and electrostatic transduction for relatively high power density [
14]. It also had the advantages of the compact size and easy implementation [
15]. However, for the applications where larger displacement was most involved, the advantages of the piezoelectric transduction were compromised.
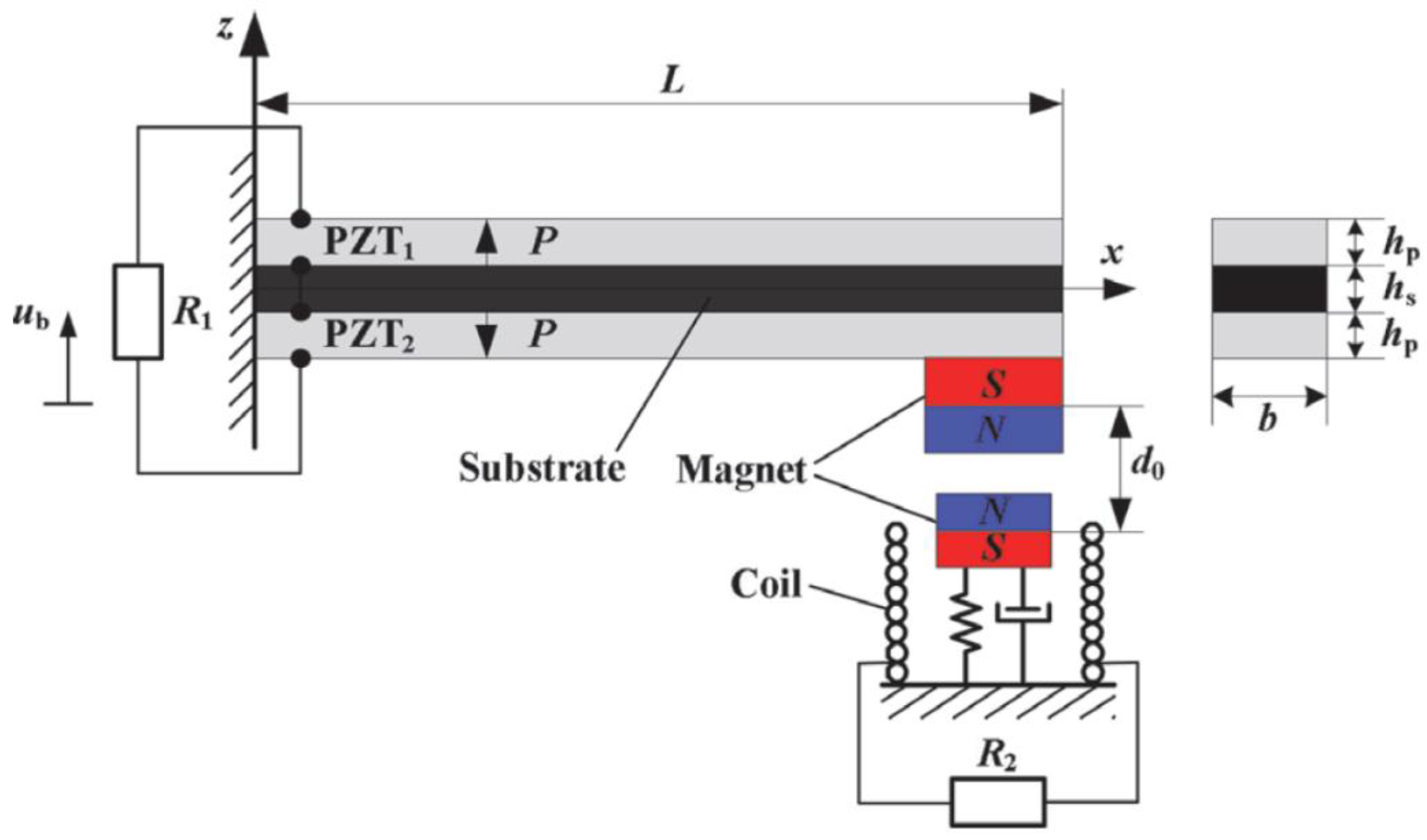
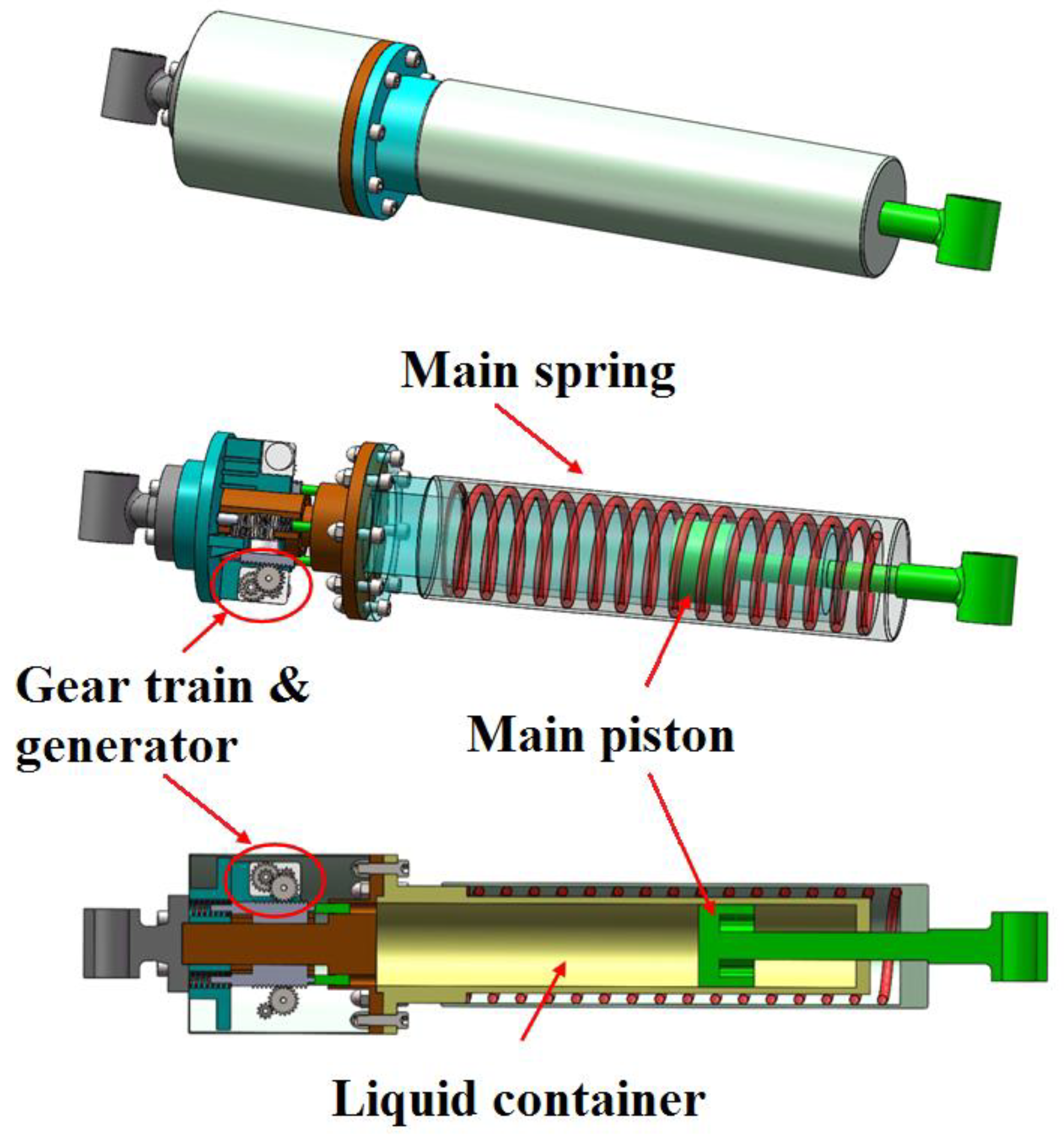
Xu, Shan [
16] proposed a hybrid energy harvester that combines both the piezoelectric and electromagnetic transducers, as shown in
Figure 3:
The results show that this combined mechanism was able to broaden the bandwidth and increase the output power, thus it was superior to any of the single mechanisms. It was proven that it inherited the advantage of high power density from the piezoelectric transduction and simultaneously it operated well under the low frequency excitation like an electromagnetic transducer.
Poulin, Sarraute [
17] constructed the equivalent impedance models to compare between two electromechanical systems. It was also concluded in the study that the piezoelectric system has higher power density than the electromagnetic system and thus is more suitable to microsystems. The comparison results are listed in
Table 1 below.
A typical shock absorber on a commercial vehicle needs to be reliable and able to operate in the frequency range of 1–30 Hz and with a maximum shock displacement of 0.1 m. It can be seen from
Table 1 that in a regenerative shock absorber the electromagnetic transducer can outperform the piezoelectric transducer due to lower strain, low resonant frequency and higher displacement.
Mitcheson, Reilly [
18] compared different transducer technologies and it was found that when the generator size increases, piezoelectric transducer gradually loses its advantage over electromagnetic transducer in the high frequency range. Similar conclusion was drawn by Elliott and Zilletti [
10], the increased size of the transducer does not improve the performance of the piezoelectric transducer, however it can improve the performance of the electromagnetic transducer. Therefore, more studies have been focused on the electromagnetic system as it is more feasible considering the modal resonant frequency of the vehicle, displacement of the shock absorber and its packaging size. In addition, compared with piezoelectric transduction, electromagnetic transduction is more reliable and cost friendly.
The power output of the electromagnetic energy harvesting system depends on total resistance and voltage output which, according to Faraday’s law of induction, can be expressed by:
where
B is the magnetic field intensity,
l is the total coil length and
v is the coil speed with respect to magnets.
Therefore, the increase of the system power output can be realized through the improvement of the coil and magnet arrangement and configuration or the amplification of the coil speed with respect to magnets. These are two main focuses of the recent development innovations for the electromagnetic regenerative shock absorbers.
The direct drive system has the magnets and coils directly attached to the vehicle body and wheel assembly, respectively. When subjected to the reciprocating movement due to the road unevenness, the relative motion between the magnets and coil generates electricity as a result of the direct attachment to the oscillators. Therefore, the coil speed with respect to the magnets strictly depends on the relative speed between the vehicle cabin and wheel. The relative speed depends on the driving speeds of the vehicle and road profiles. As a result, only the electromagnetic constant Bl can be designed, changed and optimized to increase the power output.
Instead of increasing the electromagnetic constant Bl of the direct drive system, an indirect drive system relies on the speed amplifying mechanism which can increase the coil speed with respect to the magnets. Most regenerative shock absorber can be categorized into these two drive modes for adaption with the requirements of energy harvesting and vibration control.
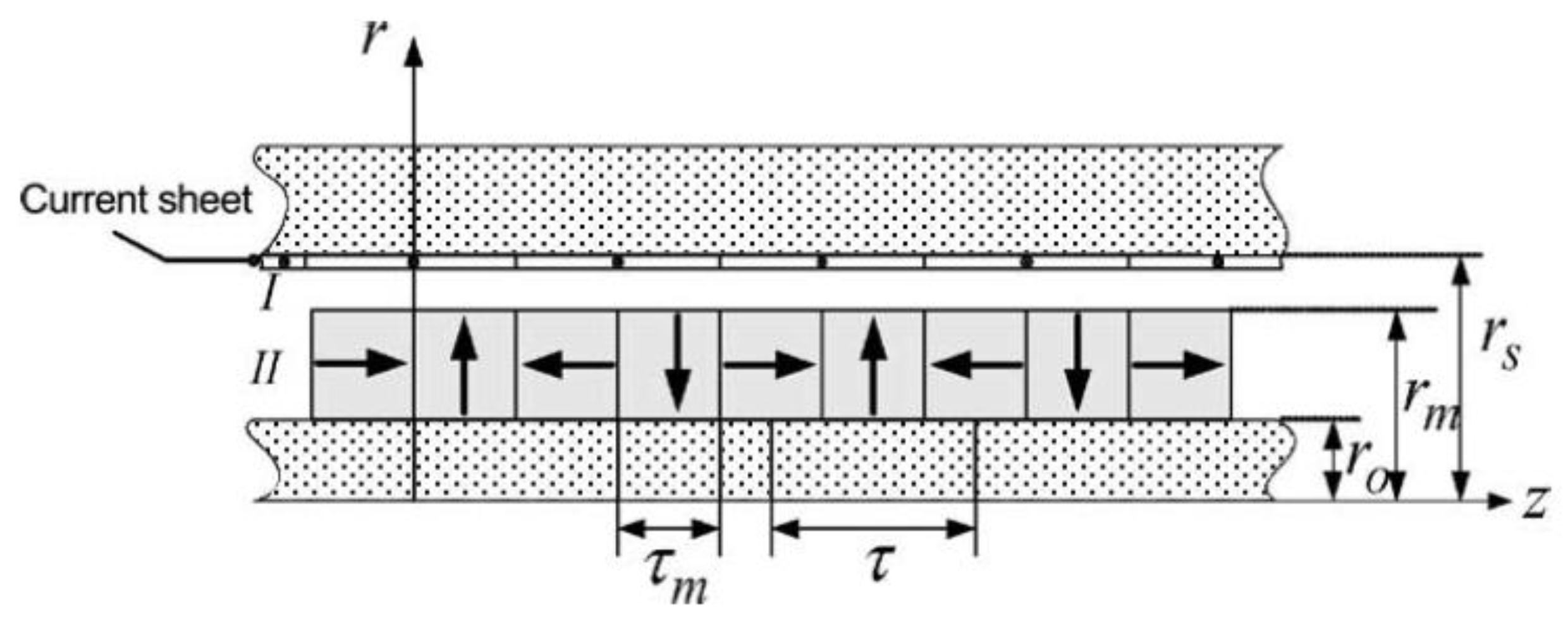
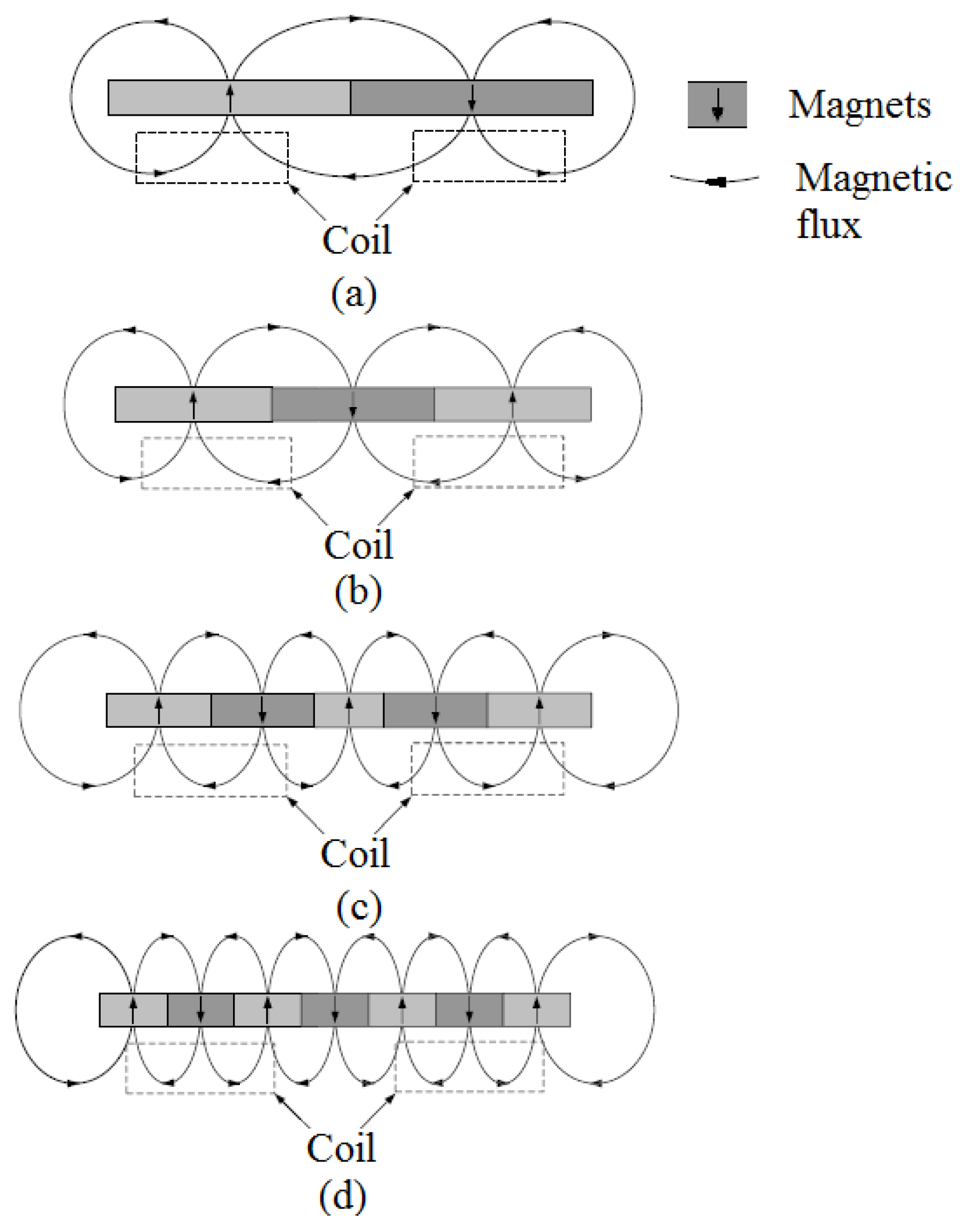
For the direct drive system, the efforts were most focused on finding the optimum magnet arrangement with a higher flux gradient per unit mass [
19,
20,
21], as well as the optimum coil profile [
22] and the optimum mass distribution of the transducer [
23]. However, their feasibility for application as the shock absorber is still undetermined. Whereas for the indirect drive system, questions have been raised on maintaining the ride comfort and road handling ability since it is the main function of the shock absorber, therefore the compatibility of the indirect drive regenerative shock absorber onto the vehicle would also be focused in the future.
Many innovative designs including different types of the transducers had been proposed, such as piezoelectric and electromagnetic transducers which includes magnetorheological, hydraulic and pneumatic drive systems [
24,
25,
26,
27,
28]. Each of these types had its own advantages and disadvantages and was only applicable in certain applications. Due to the packaging size and mass restrictions of the shock absorber, the transducers are hard to be fairly compared to determine which type is most suitable for the application of the shock absorbers.
In order to maximize the energy harvesting efficiency, further investigations have been conducted on the electrical circuits and control algorithms. Because of the variation of the transducers utilized in the harvester, different electrical circuits and control algorithms may not work equally well.
This paper reviews the recent technologies of the regenerative shock absorber. The highlight of this paper is to categorize the regenerative shock absorbers based on their drive modes and study the associated damping performance, energy harvesting efficiency, electrical circuit and control algorithm. Each of these aspects will be summarized in the tables. The excitation input of the regenerative shock absorber will be applied as sinusoidal, step and random inputs. The possibility and potential of the nonlinear regenerative shock absorber will be discussed. Lastly, the future research direction of the regenerative shock absorber design will be discussed based on the research gaps. This paper aims to review the up to date techniques involved in the regenerative shock absorber design and closing the research gaps identified to pave the way for the future study.
4. Comparison between the Direct Drive System and Indirect Drive System
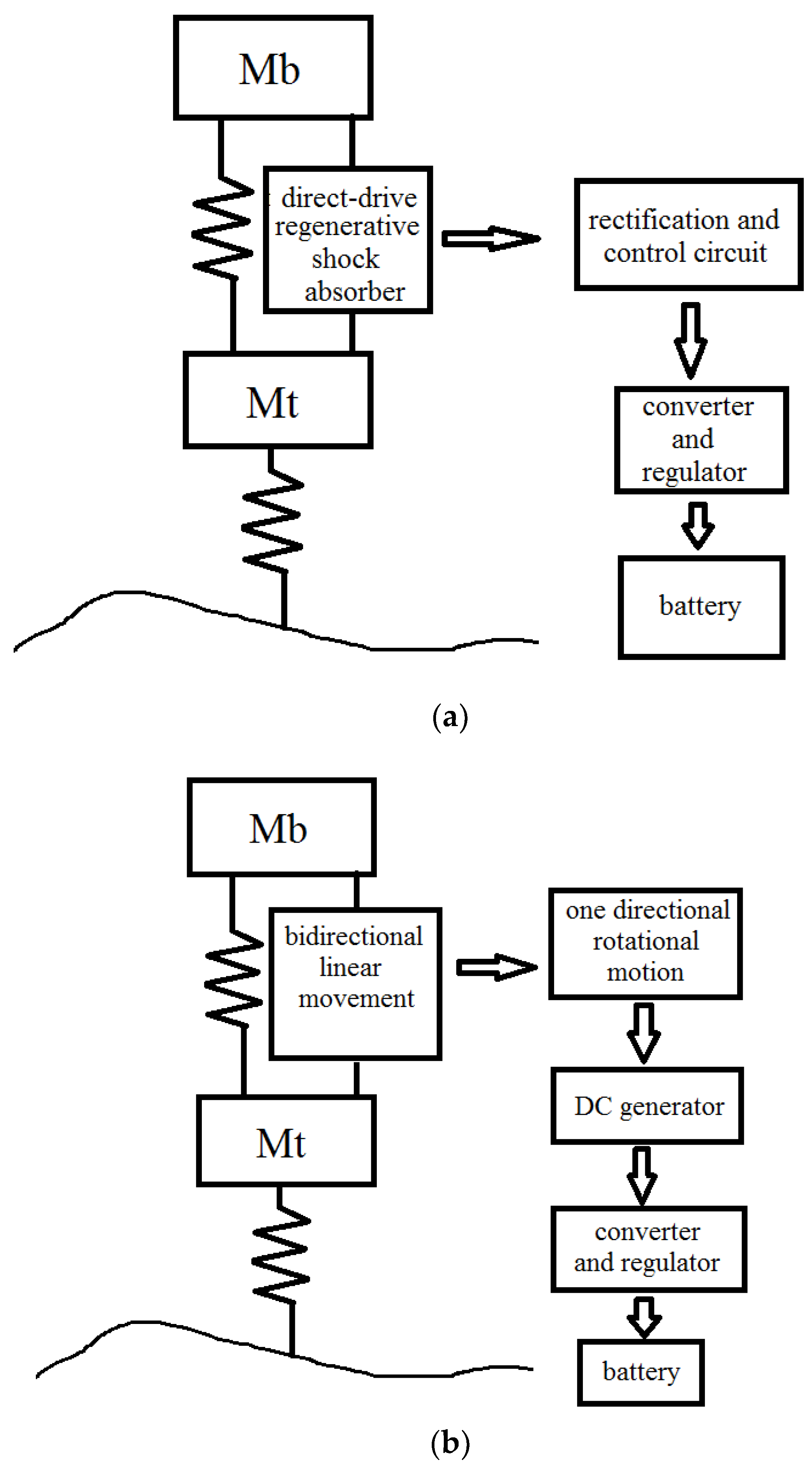
The regenerative shock absorber system can be divided into two main categories based on the drive mode. If the energy can be regenerated directly as a result of the linear movement between the two oscillators, namely the wheel assembly and the vehicle body, it can be categorized as the direct-drive regenerative shock absorber system. The other type, which is the indirect drive regenerative shock absorber system, relies on a certain mechanism to achieve the conversion between the linear motion of the shock absorber and the rotary motion of the generator. During this process the input speed can be amplified by the mechanism. The 2DOF lumped mass spring systems can be applied to represent the quarter car suspension systems with these two categories of the regenerative shock absorber systems, as shown in
Figure 17.
Compared with the direct drive system, the indirect drive system has the following advantages:
The frequency, displacement and velocity amplitudes of the input excitation can be changed through the installed mechanism to achieve better energy harvesting and vehicle dynamics
The increase of the input excitation speed through the speed amplifying mechanism can eliminate the need for a strong magnetic field, therefore the number of magnets can be reduced and undesired additional weight can be minimized.
The layout of the system is more flexible as the mechanism of the indirect drive does not have to be inside the shock absorber.
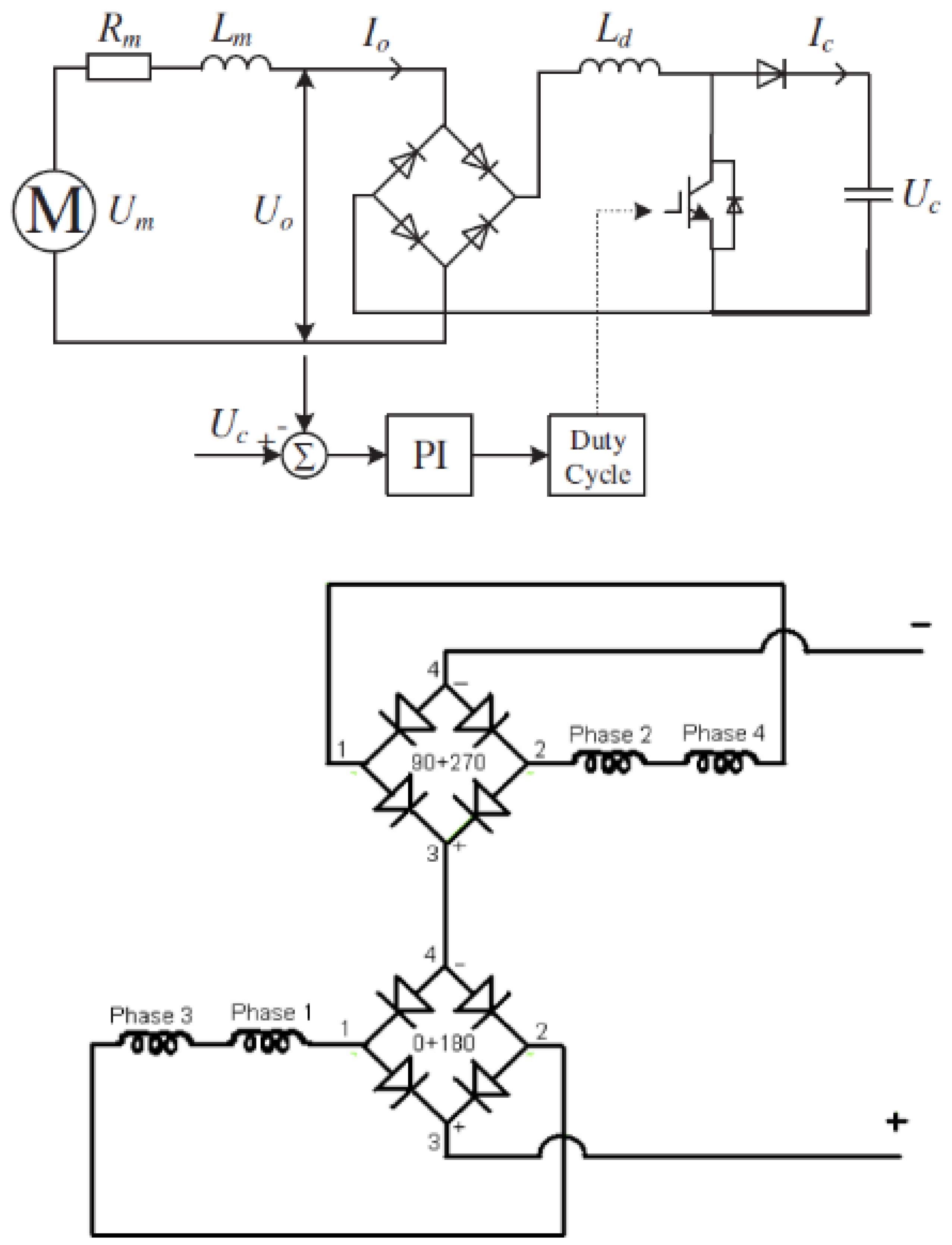
In
Figure 17, another noticeable difference between these two drive modes is that the direct drive system has the AC output and the indirect drive has the DC output. As a result, the voltage output of the direct drive system needs rectification before charging the battery whereas in the indirect drive system, the unidirectional rotation of the DC motor have a constant DC output thus the rectification process is not required. Regulation or dc-dc inverter is needed for both systems to maintain a steady constant voltage for effectively charging a battery.
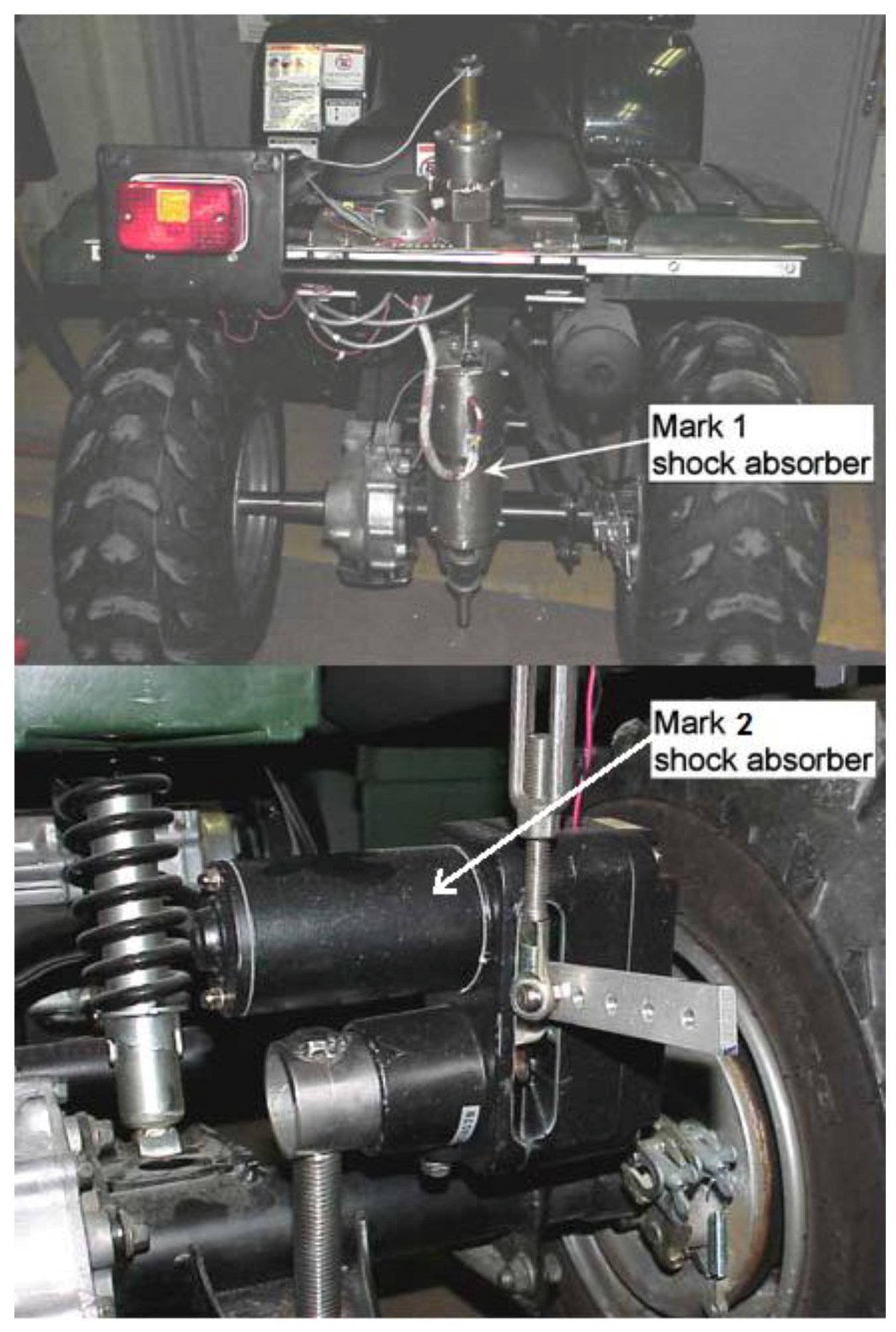
To compare the energy harvesting performance of the regenerative shock absorbers with different drive modes, Gupta, Jendrzejczyk [
29] have both direct drive and indirect drive regenerative shock absorbers installed on an all-terrain vehicle (ATV) passing a wooden beam, shown in
Figure 18. Mark 1 shock absorber is a direct drive linear electromagnetic generator with two layers of magnets and mark 2 is an indirect drive system with a lever arm that can convert the linear motion into rotary motion where the input speed is amplified 6 times. The results showed that when running over the wooden beam, direct drive system can generate 7.4 W while the indirect drive system can generate 88.8 W.
Even though the results indicated a considerable difference between the amounts of the harvested power, it cannot be concluded that the indirect drive system is more efficient than the direct drive system. In most of the papers that compare the drive modes, the generator configurations differ as the direct drive system has a linear generator and the indirect drive system has a rotary generator, hence the difference of the generator configurations results in the difference of the energy output. In addition, the damping coefficients of the regenerative shock absorbers and their effects on the vehicle dynamics should also be evaluated.
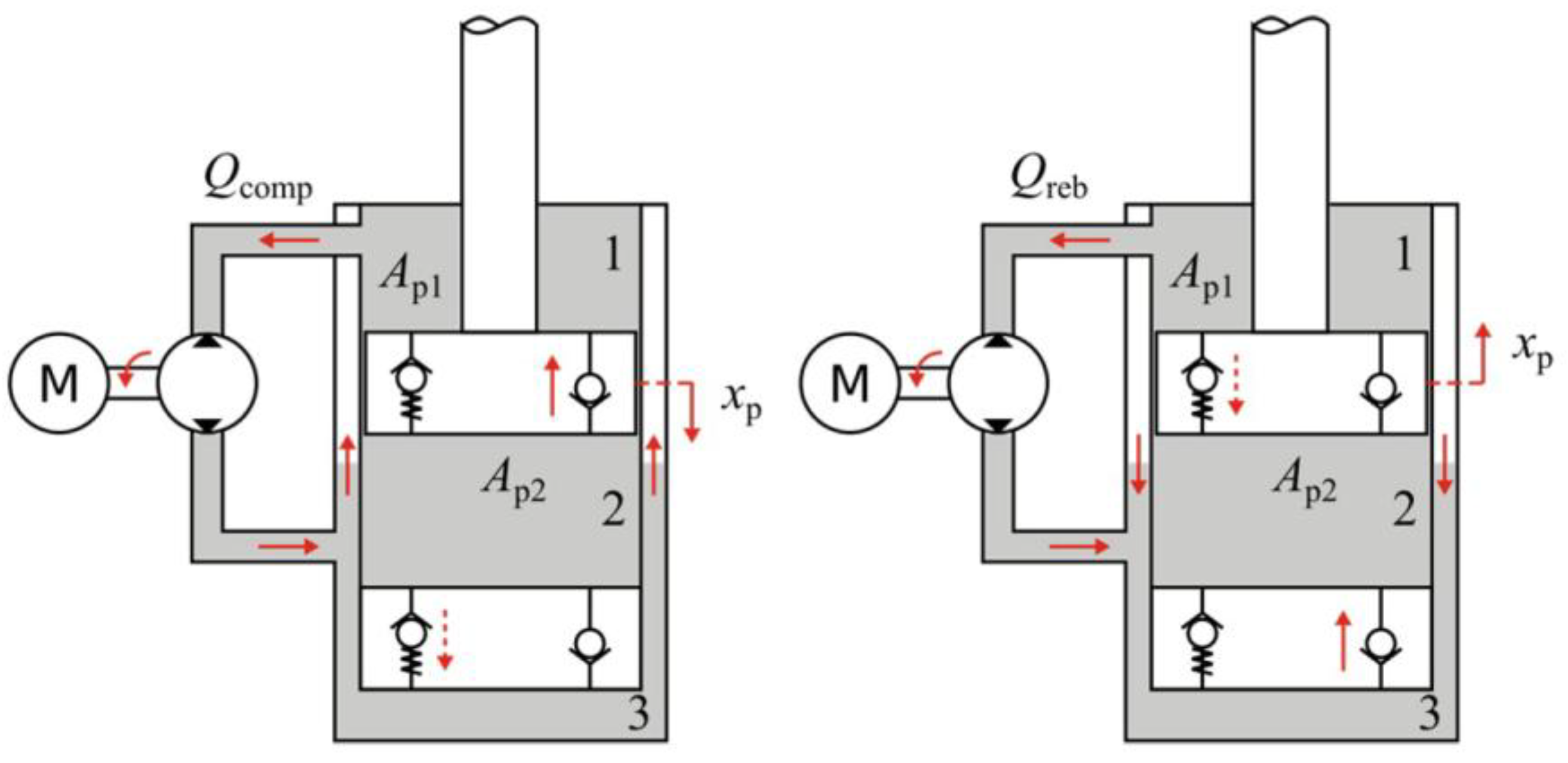
For the indirect drive system with the fluid motion rectifier, Ebrahimi, Bolandhemmat [
30] believed that the fluid motion rectifier is heavy, expensive, and consumes too much energy. More disadvantages were addressed by Crolla [
73] who pointed out that not only will the fluid leakages and raptures decrease the reliability, but also will they degrade the suspension performance which is limited by the narrow excitation frequency bandwidth of the hydraulic/pneumatic system. Additionally, more energy is dissipated with the increased temperature of the fluid.
Ultimately, considering the difference of the transducers of the different drive modes, it is suggested in future studies to use the same generator constant or electromechanical coupling constant so that the energy generating ability and the motor resistance force can be compared.
9. Nonlinearity
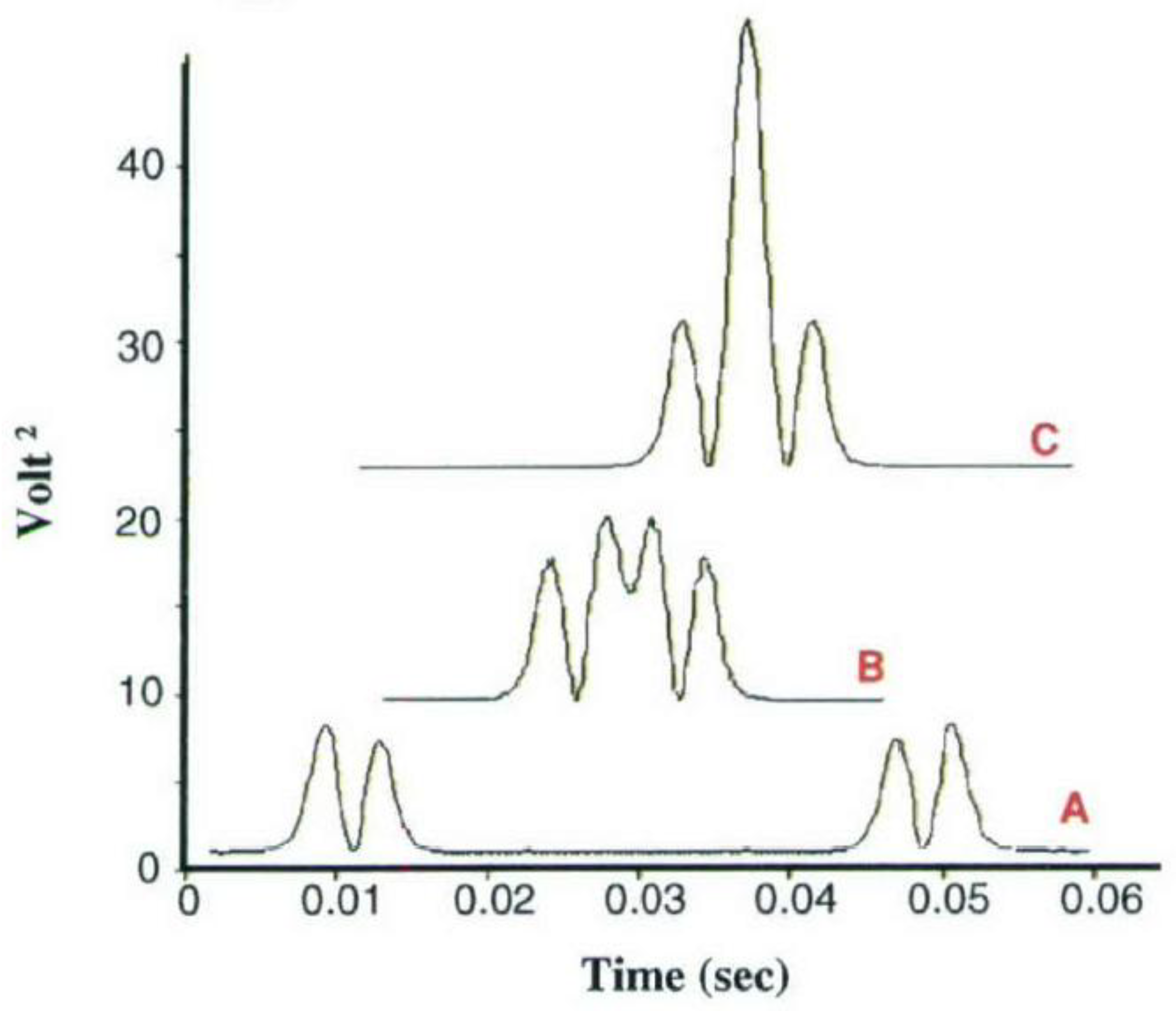
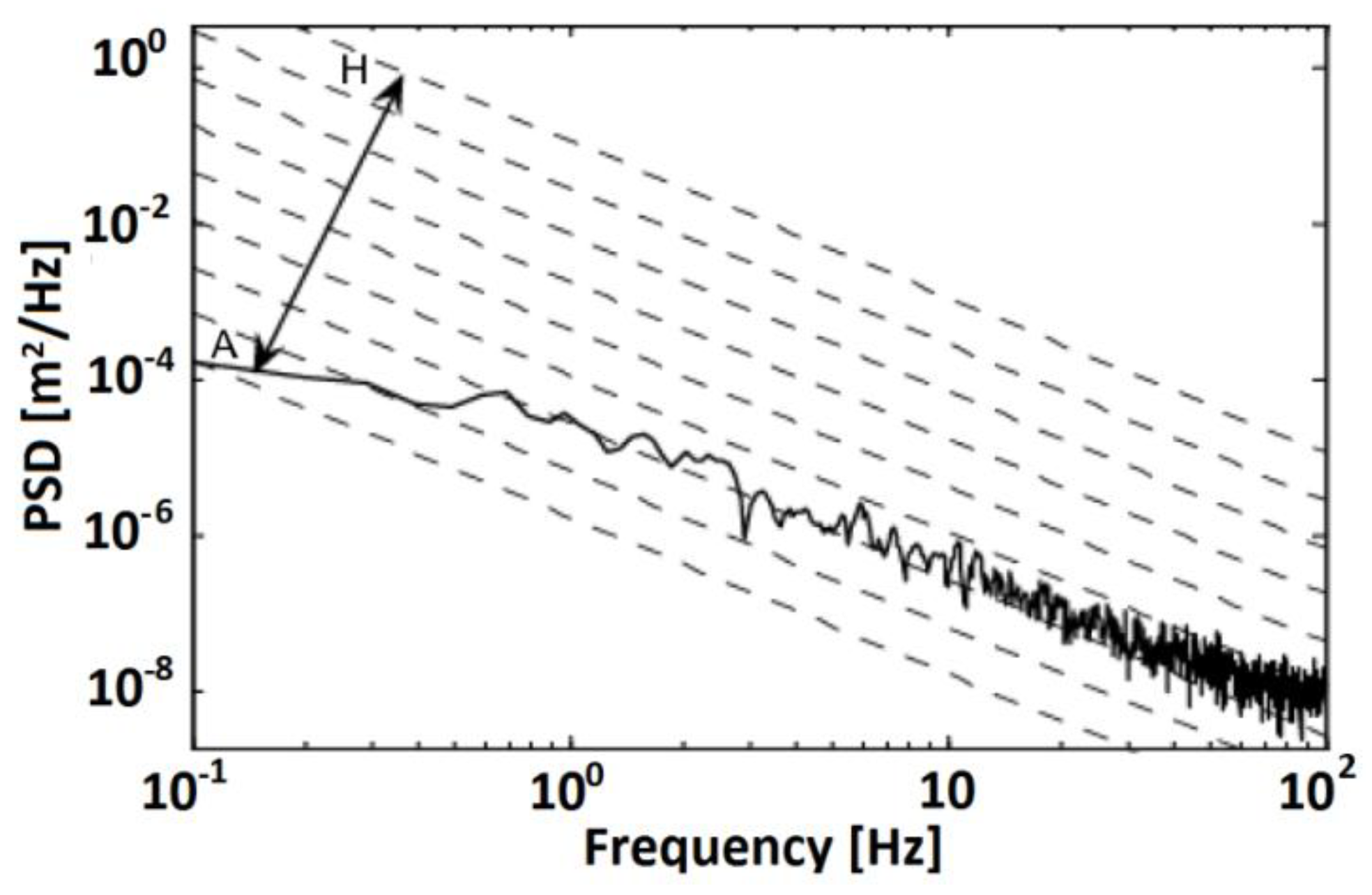
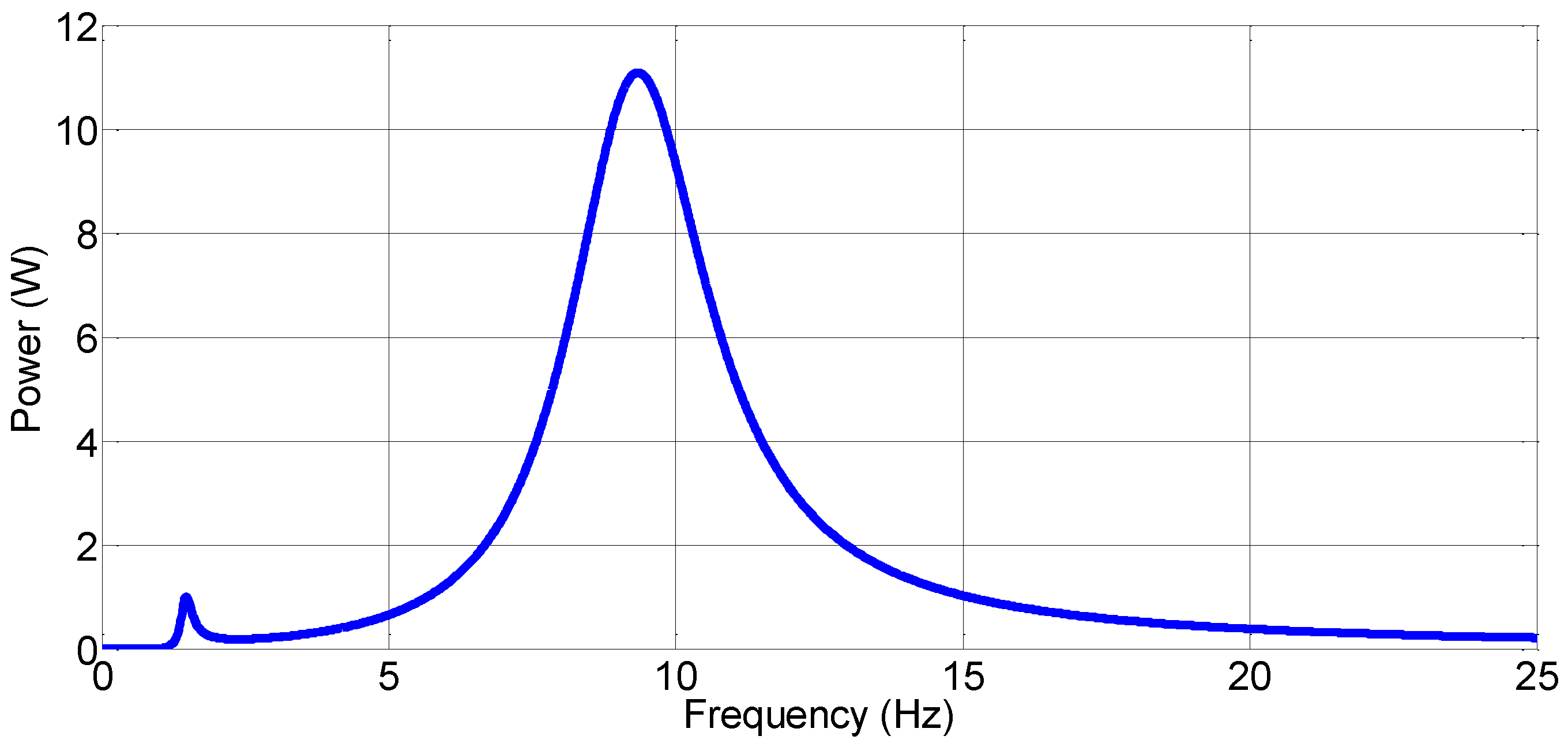
Due to the nature of the linear regenerative vehicle suspension, more energy can be harvested at the resonant natural frequencies.
Figure 40 is an example of the frequency spectrum of the power generation in a quarter vehicle regenerative suspension system [
128]. One of the drawbacks of the linear regenerative vehicle suspension is that the resonant peak frequency bandwidth is really narrow, resulting in very little energy that can be regenerated [
129]. The use of nonlinear spring can broaden the energy harvesting bandwidth or shift the modal resonant frequency to achieve higher power, which is especially suited for energy harvesting from random vibration [
130]. For these purposes, many researchers have studied nonlinear system model that can be adopted for the regenerative vehicle suspension system [
131,
132,
133,
134,
135].
A magnetic levitation energy harvesting device was proposed by Mann and Sims [
136] and shown in
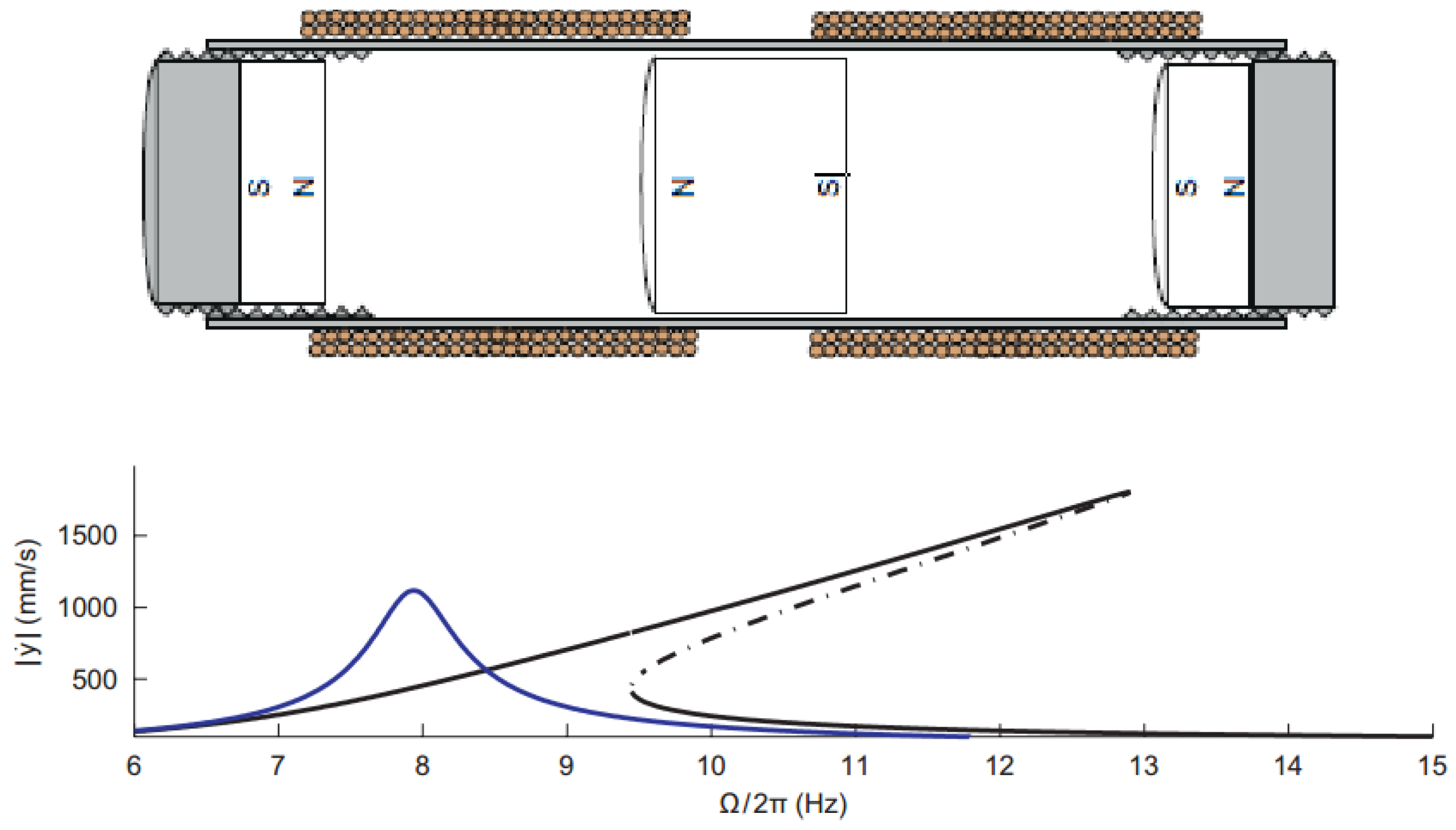
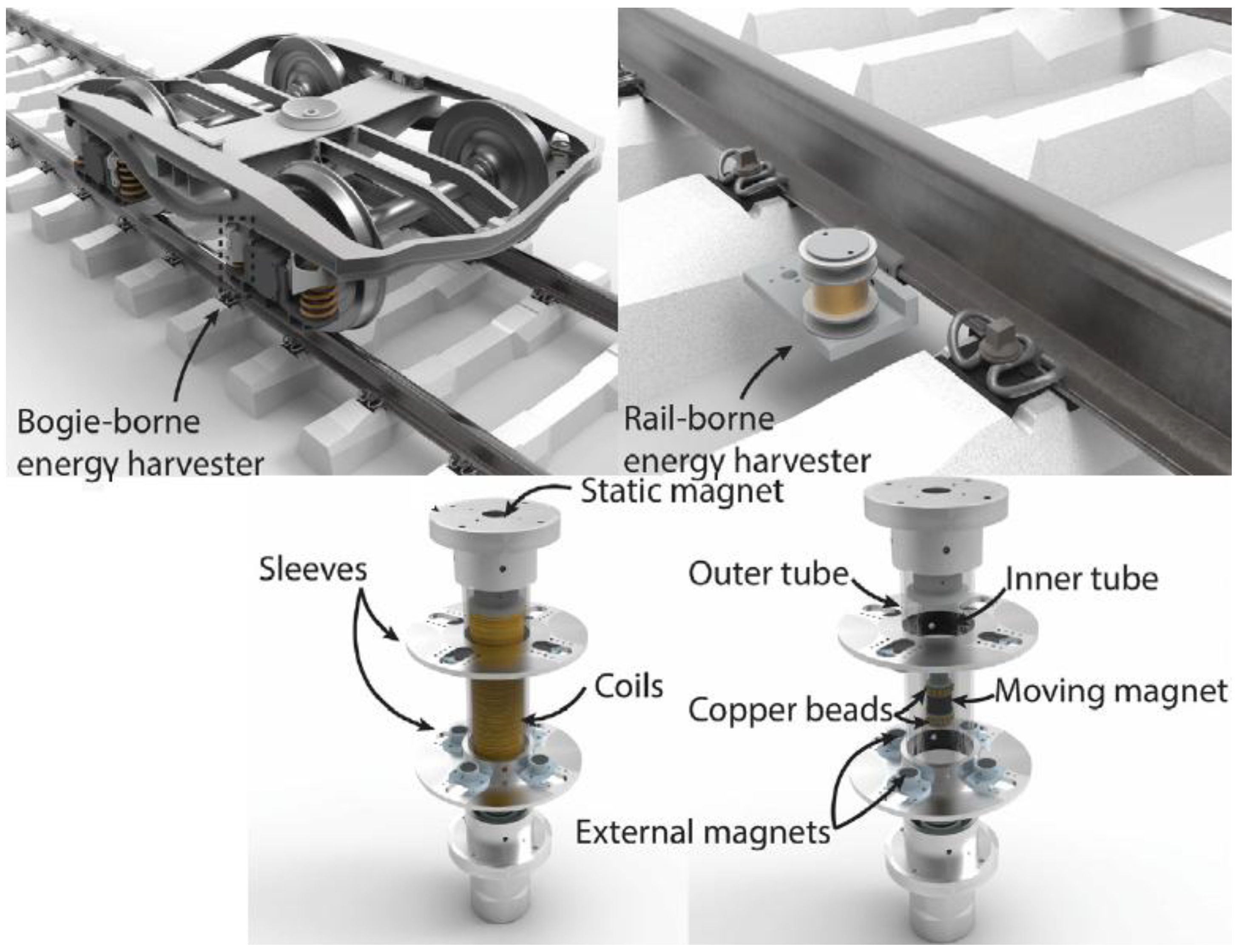
Figure 41. The mathematical model could be obtained using the Duffing equation and it was found that the nonlinearity was applicable to larger excitation displacement amplitude, resulting in a broader harvesting frequency bandwidth. The peak power could be obtained away from the equivalent resonant frequencies. Gao, Wang [
137] proposed the similar magnetic levitation system for harvesting energy from rail and bogie as shown in
Figure 42. Another interesting innovation was brought by Barton, Burrow [
129] who further increased the bandwidth by changing the load resistance. It was also discovered that the nonlinearity presents super-harmonic resonances well above the natural frequencies of the equivalent linear system, allowing the system to respond at a frequency higher than the excitation frequency. This up-frequency conversion could be useful for the low frequency operation such as a vehicle suspension system.
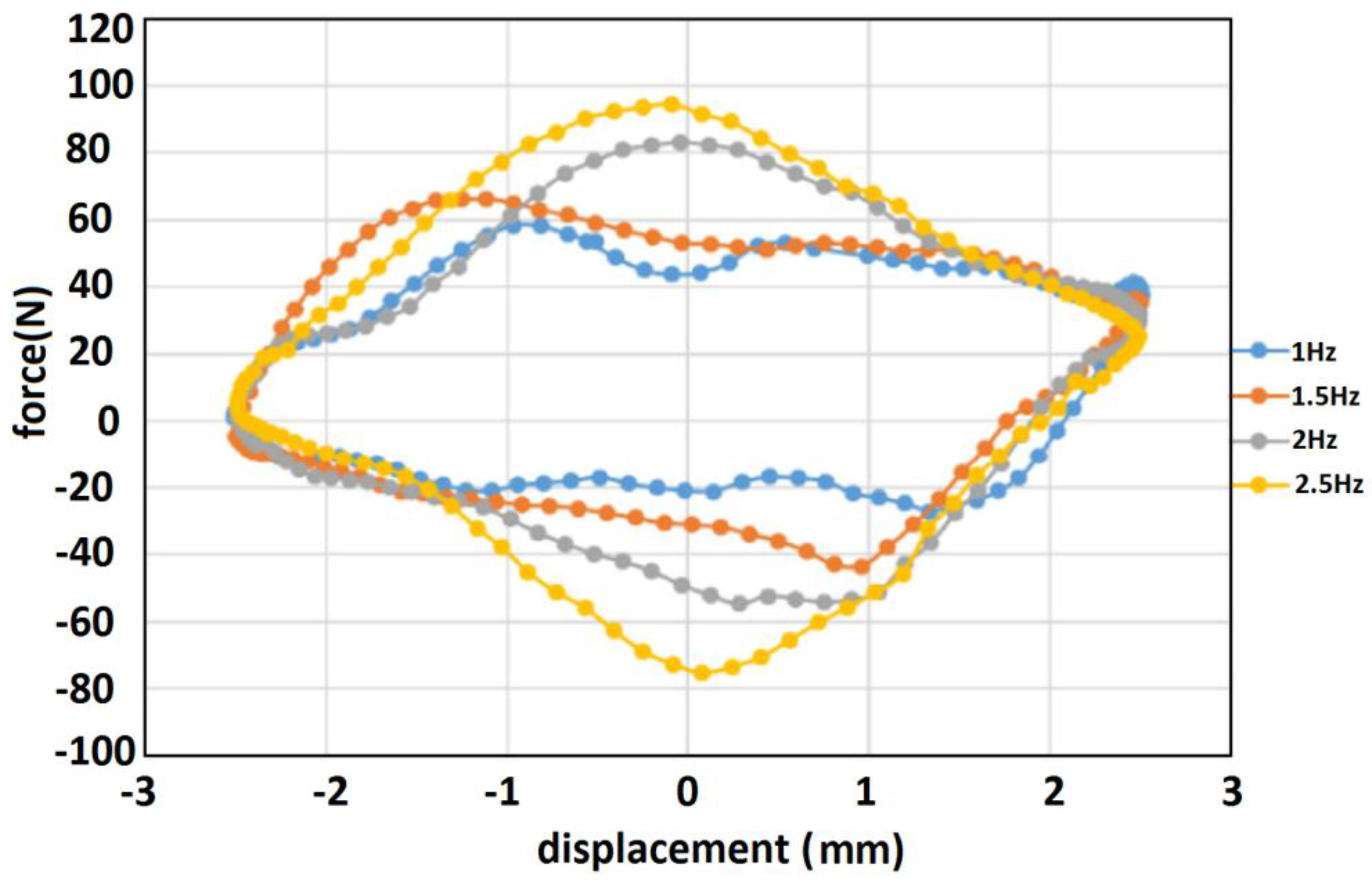
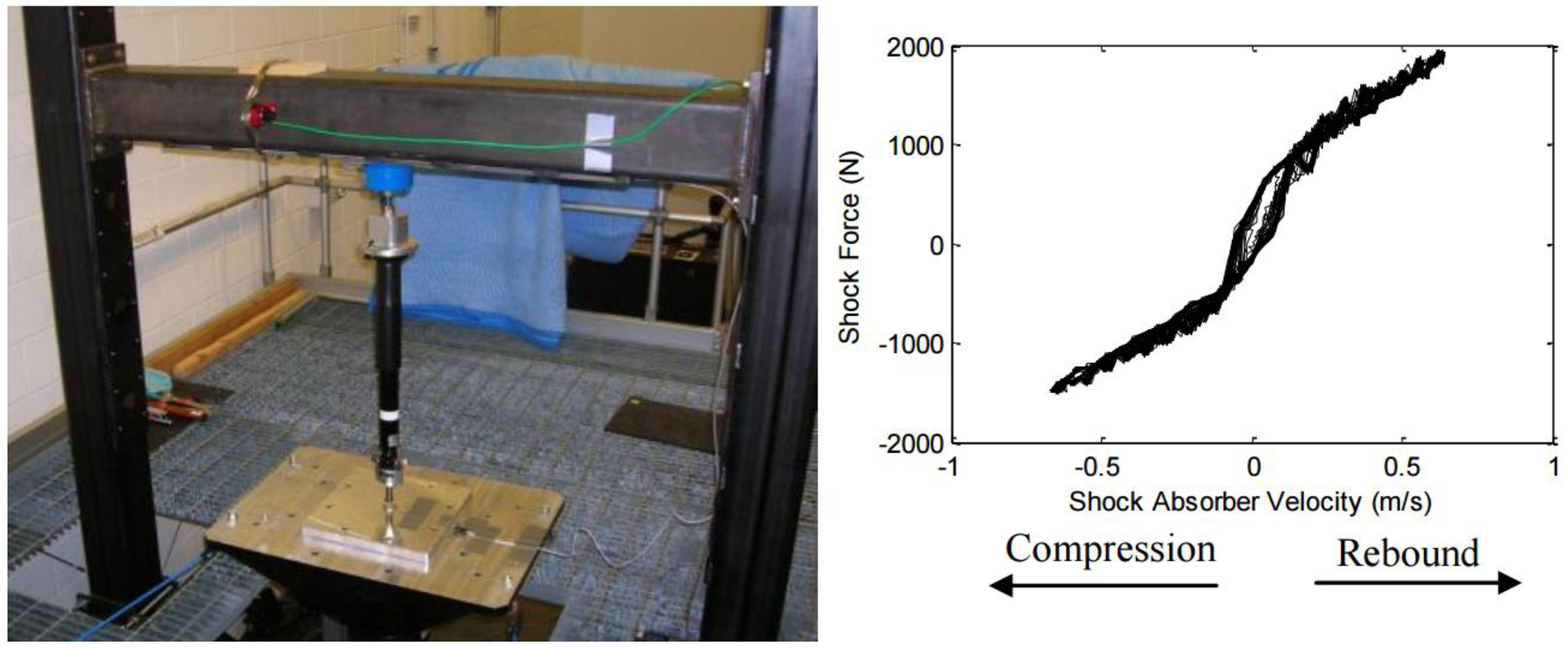
There have been a number of suspension system designs that incorporate the nonlinearity model due to its advantages in prediction of vehicle dynamics. Özcan, Sönmez [
138] evaluated the nonlinear spring and nonlinear damper in the half car system to optimize the comfort and the handling of the light vehicle. Similar dynamic study was conducted by Cui, Kurfess [
139] on the shock absorber in a Mazda CX-7, the test result clearly showed that the nonlinearity was involved in the operation shown in
Figure 43. The stability and comfort of the vehicle could be improved by this nonlinearity.
Although the concept of the nonlinearity model has been largely applied on the vehicles to predict vehicle vibration response due to the road profile excitation, there have not been many investigations undertaken for the nonlinear model of the vehicle suspension system built with the regenerative shock absorber in terms of harvesting energy, which can be identified as a research gap and should draw more attention considering the potentials of the regenerative shock absorber and its readiness to be implemented. The potential advantages of the nonlinear regenerative shock absorbers are:
Widening the frequency bandwidth for harvesting more energy on the random road surface.
Shifting the harvesting frequency away from the vehicle equivalent resonant frequency for better reliability.
Converting the low road excitation frequency into high energy harvesting frequency.
Better ride comfort and road handling.
10. Future Direction for Regenerative Shock Absorbers
The rapid developments of the new technologies have improved the feasibility of the regenerative shock absorber. In order to be implemented onto the vehicle, a regenerative shock absorber needs to meet the requirements for the power output, energy harvesting efficiency and vehicle dynamic control. The current regenerative shock absorbers pose some disadvantages, which many authors have attempted to address both mechanically and electrically. Each step forward in the research area would bring them closer to the implementation reality and their sustainability.
The current limitation of the direct-drive regenerative shock absorbers is the constraint of the packaging space. Because the coil speed with respect to the magnets cannot be amplified, the magnets and coils have to be large enough to obtain large electromechanical coupling constant. The main limitation of the indirect-drive regenerative shock absorber is that the complexity of the motion conversion mechanism can affect the vehicle dynamics, resulting in poor handling or discomfort. Therefore, it is suggested that the future design of the regenerative shock absorber should incorporate more efficient magnets, and the coil setup is preferably outside the magnets, and the damping should be presented in both compression phase and the recoil phase of the shock absorber motion. It is also expected that the mechanism needs to be less complicated to reduce the friction energy loss. For the regenerative shock absorber containing hydraulic/pneumatic system, the response time needs to be reduced to obtain the instant control of the vehicle.
Many researches have been done focusing on improving the performance of the regenerative shock absorbers, however, the integration with the vehicle has not been addressed enough yet. In the future research, it is recommended that dynamic model of the full vehicle needs to be considered as the platform for the regenerative shock absorbers, since the evaluation based on the full vehicle suspension system is more accurate and closer to the reality. Based on the full vehicle suspension system model, a nonlinear suspension can also be studied for its advantages in broadening the energy harvesting bandwidth.
Active control is another area to be researched. Due to the contradiction between the energy harvesting and vehicle dynamic control performances, a control algorithm is needed to make a compromise between both the performances in accordance with the condition of the road surface and driver’s demand. A power generating element can be used reversely as an actuation element when the active control becomes the priority and vice versa. Ideally, a balance point can be identified by the control system. As a result, the self-powering can be achieved intellectually where the energy harvested at the regeneration mode of the transducer is enough to power the actuation mode. Hence, future research should concentrate more on the active control algorithm and its incorporation with the energy harvesting.















































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}