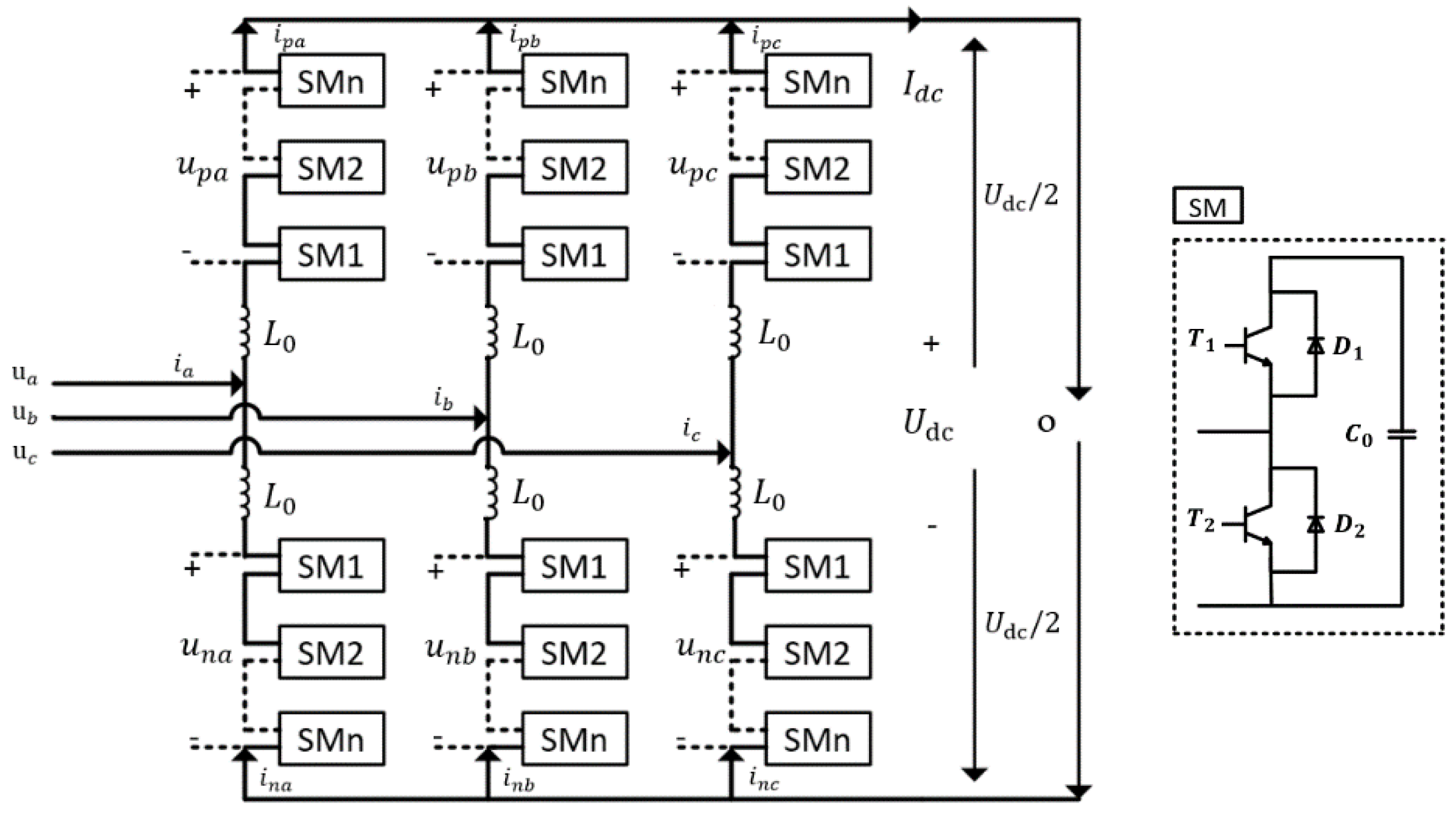
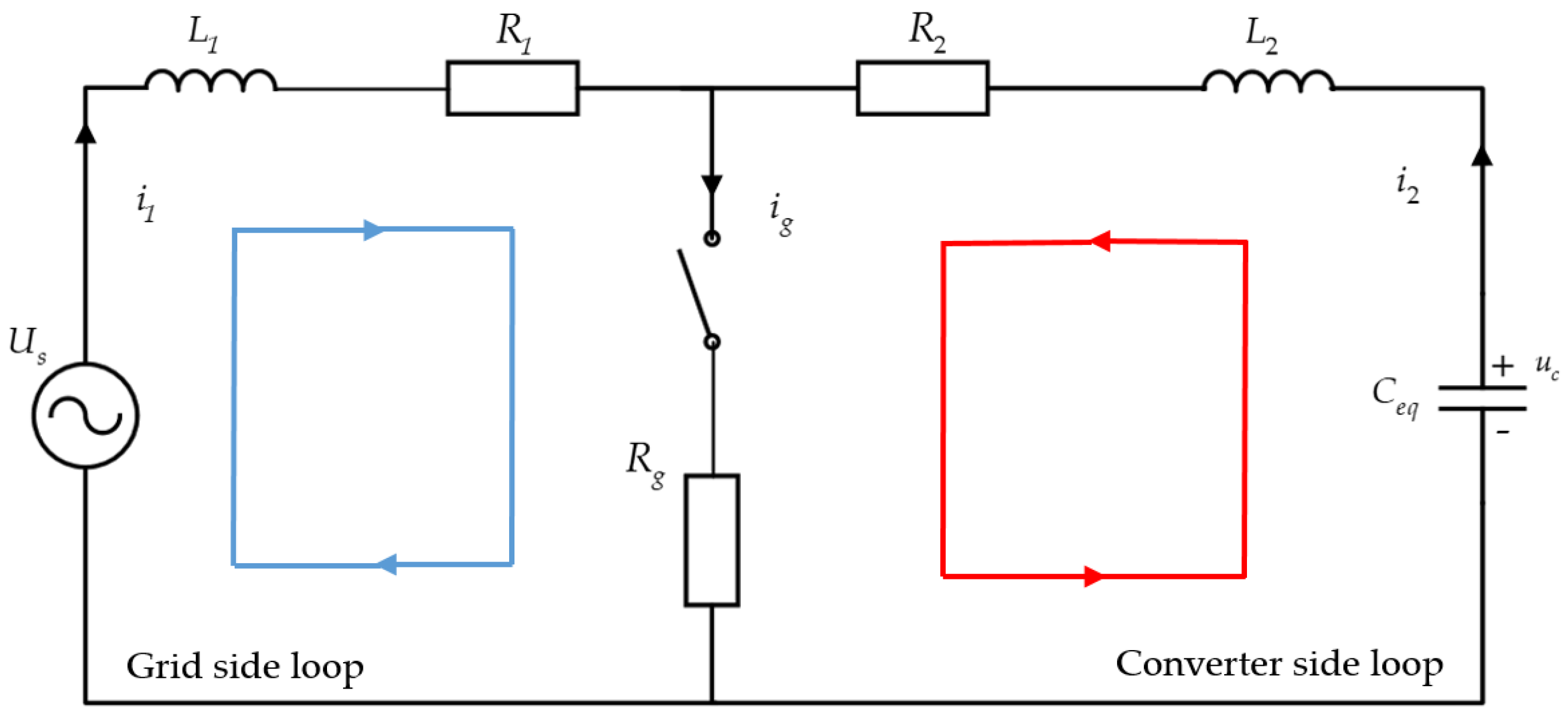
Figure 1.
Equivalent circuit of a modular multilevel converter (MMC).
Figure 1.
Equivalent circuit of a modular multilevel converter (MMC).
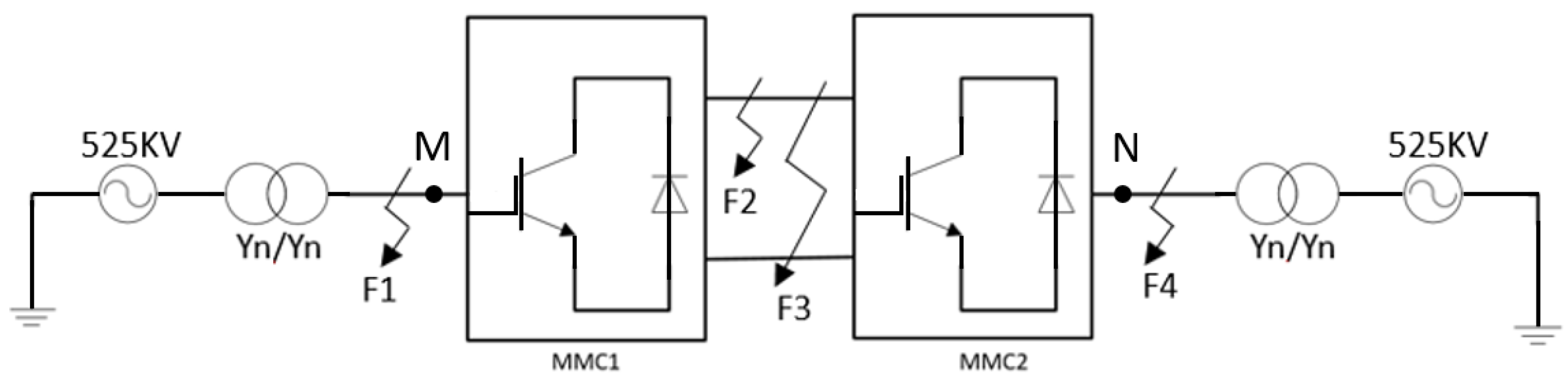
Figure 2.
Back-to-back (BTB) modular multilevel converter-based high-voltage direct current (MMC-HVDC) model.
Figure 2.
Back-to-back (BTB) modular multilevel converter-based high-voltage direct current (MMC-HVDC) model.
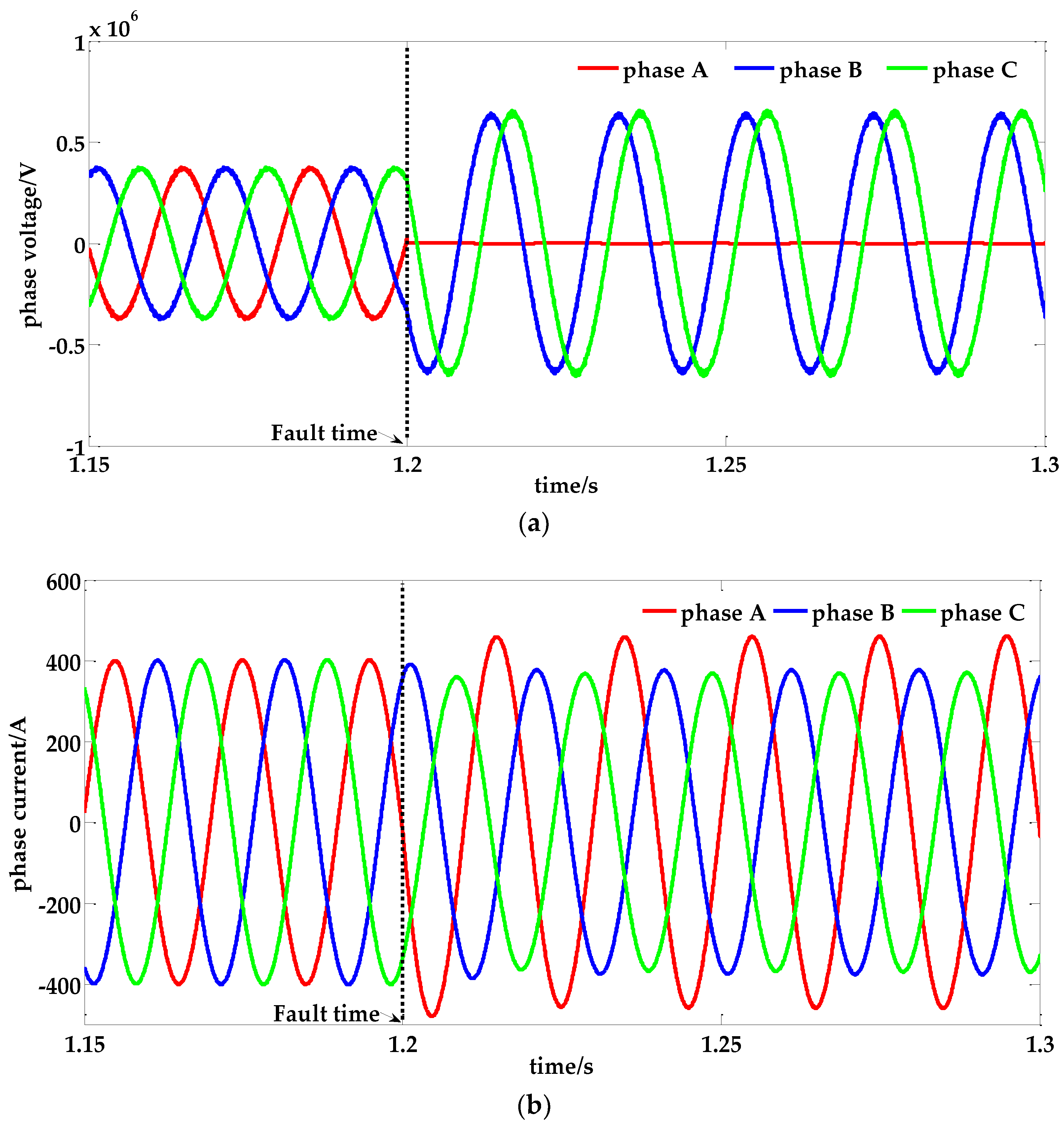
Figure 3.
Fault transients under a single-phase grounded fault at the rectifier side. (a) Phase voltage; (b) Phase current.
Figure 3.
Fault transients under a single-phase grounded fault at the rectifier side. (a) Phase voltage; (b) Phase current.
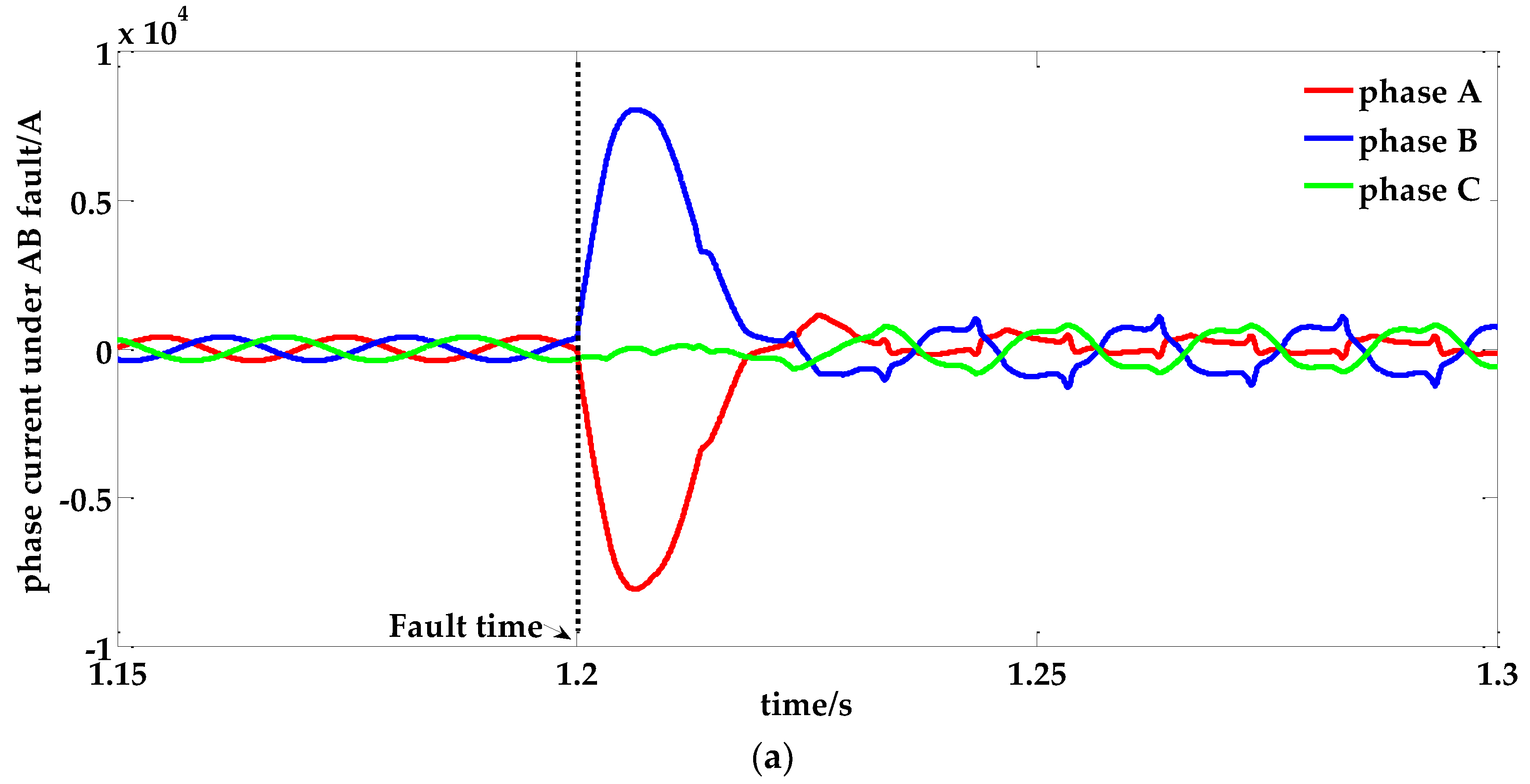
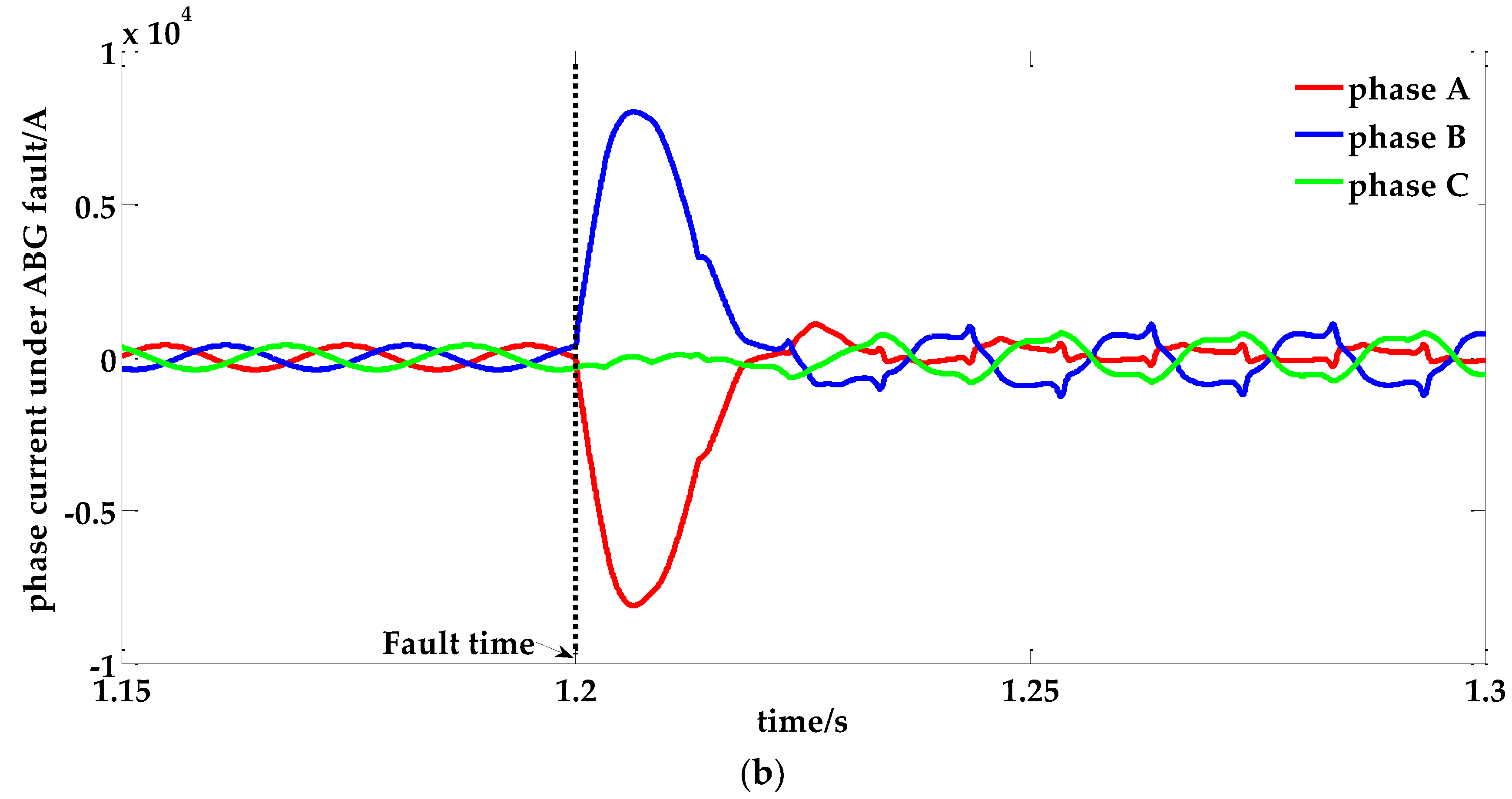
Figure 4.
Fault current at point M under (a) AB-phase ungrounded (AB) short-circuit fault; (b) AB-phase grounded (ABG) short-circuit fault.
Figure 4.
Fault current at point M under (a) AB-phase ungrounded (AB) short-circuit fault; (b) AB-phase grounded (ABG) short-circuit fault.
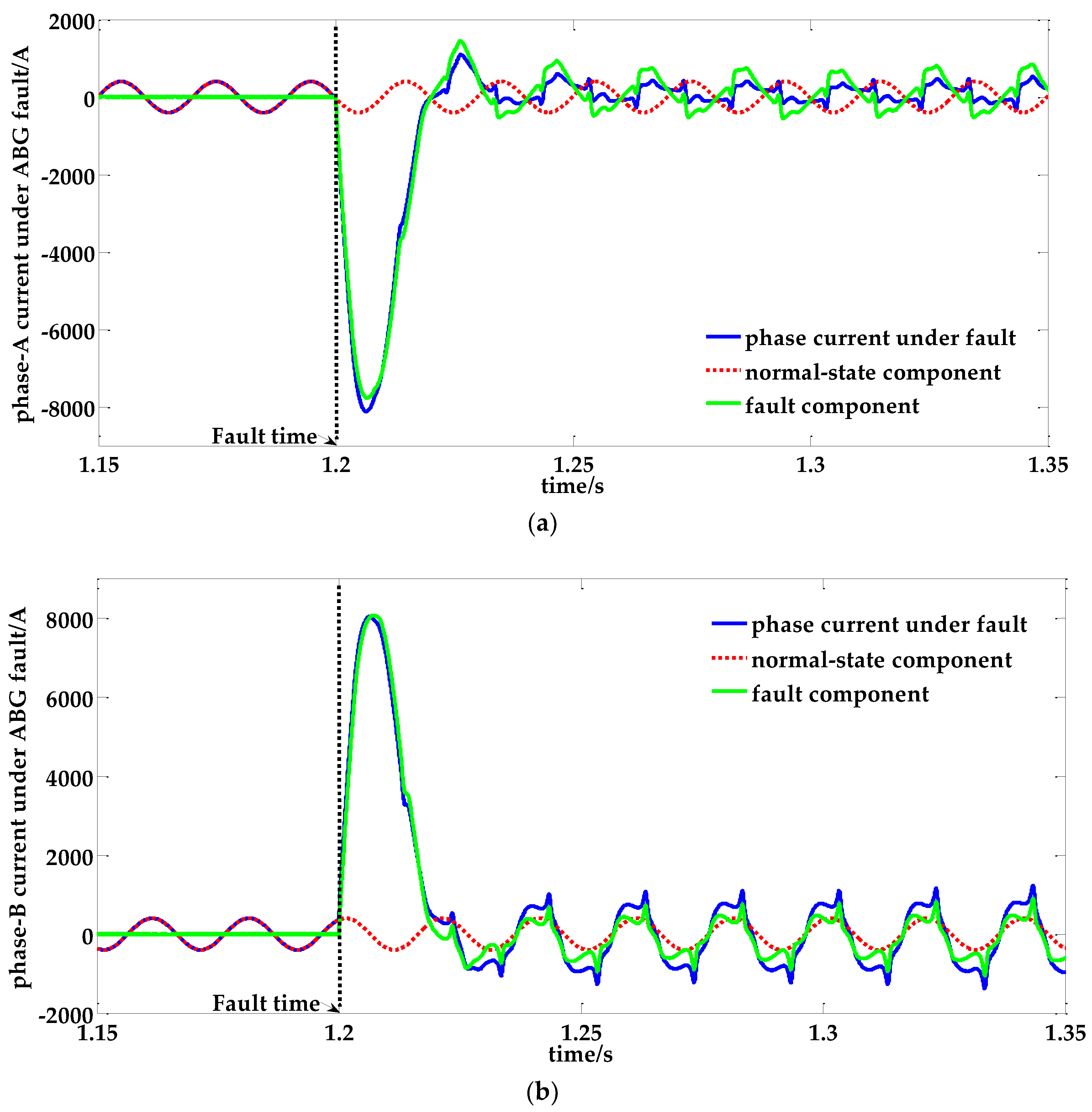
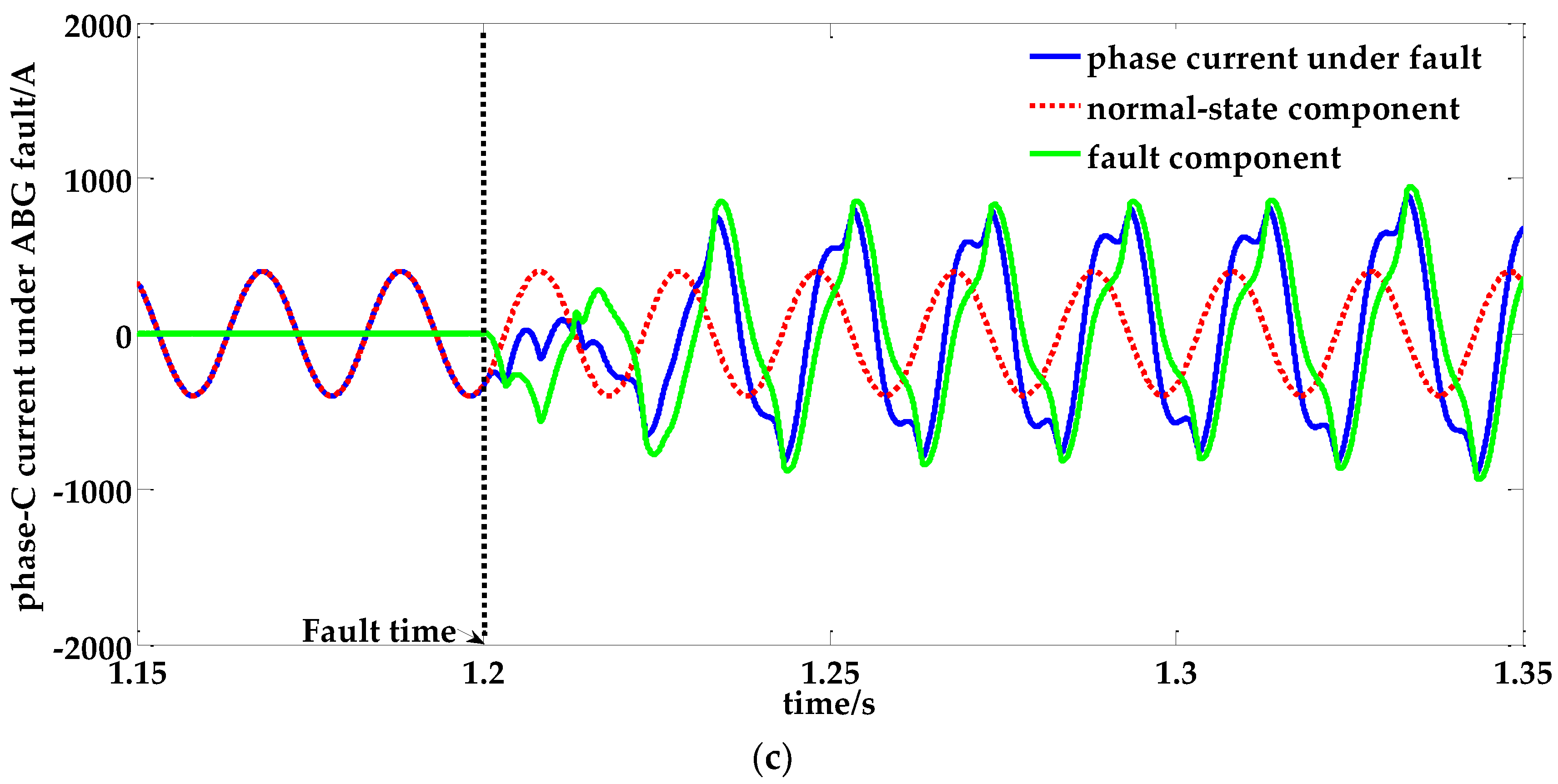
Figure 5.
Fault component of the phase current under the ABG fault: (a) phase-A current; (b) phase-B current; (c) phase-C current.
Figure 5.
Fault component of the phase current under the ABG fault: (a) phase-A current; (b) phase-B current; (c) phase-C current.
Figure 6.
Equivalent circuit of a single-phase grounded short-circuit fault.
Figure 6.
Equivalent circuit of a single-phase grounded short-circuit fault.
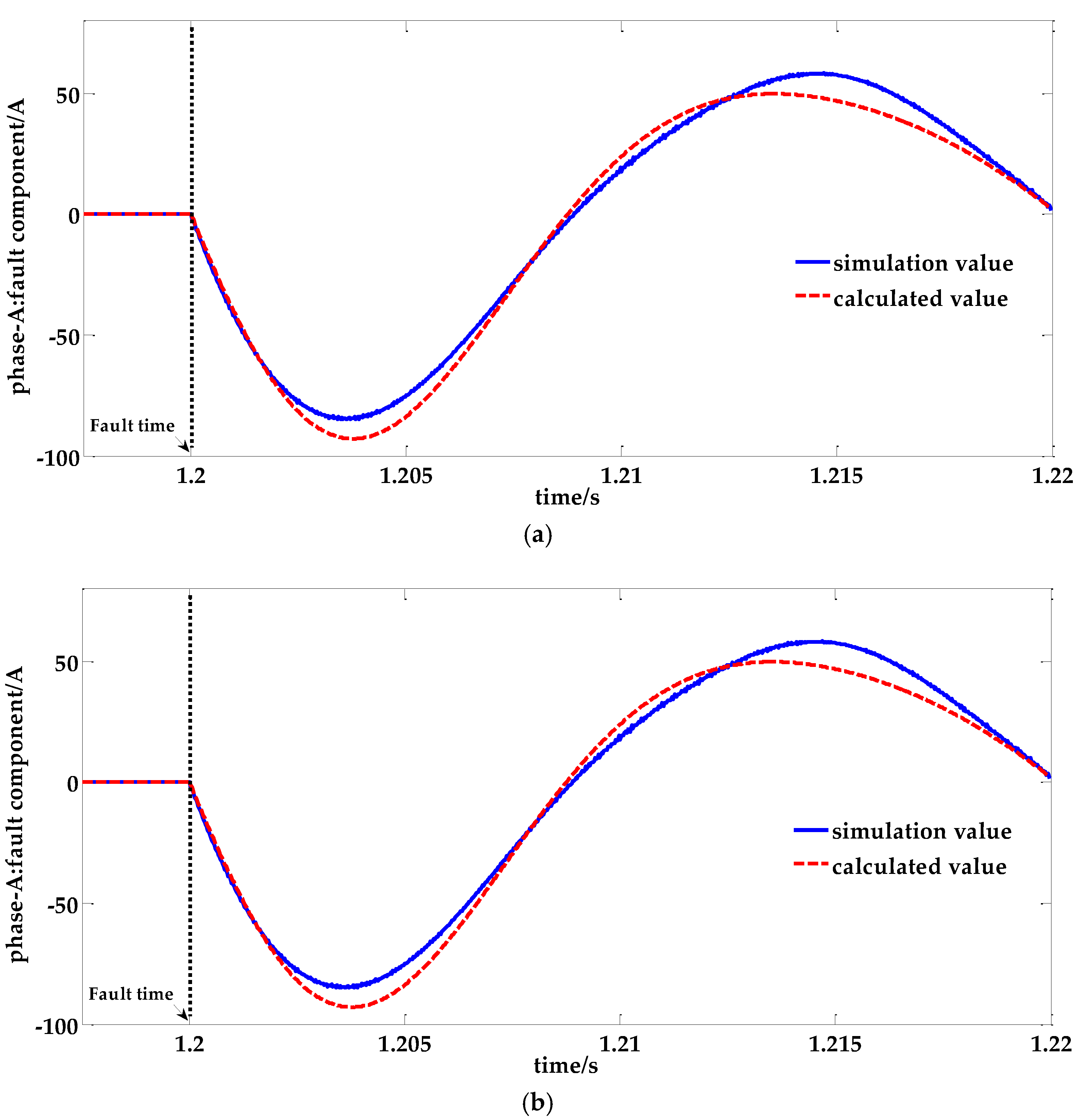
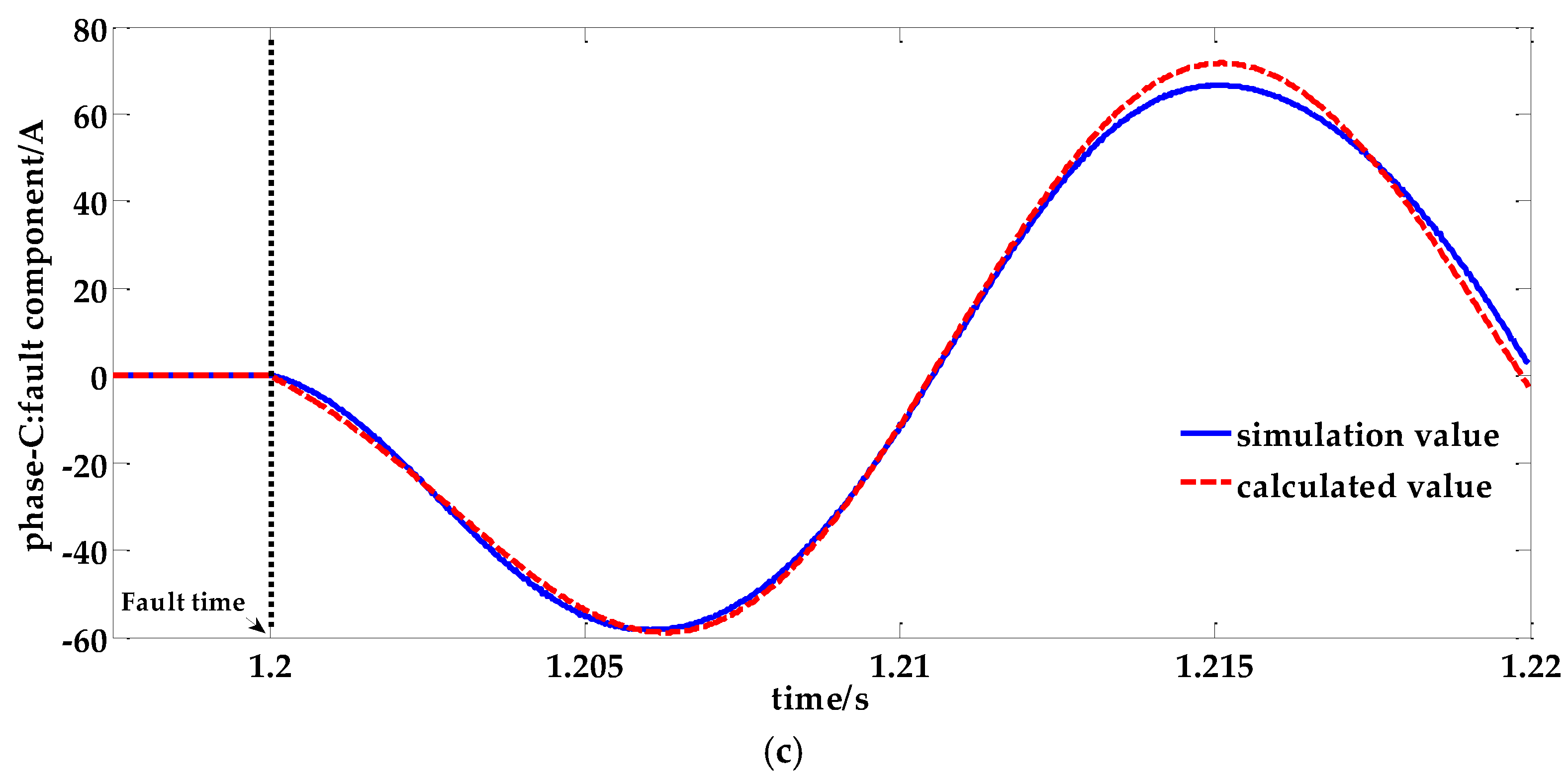
Figure 7.
Simulation and calculated values of the three phase currents under phase-A grounded (AG) fault: (a) phase-A current; (b) phase-B current; (c) phase-C current.
Figure 7.
Simulation and calculated values of the three phase currents under phase-A grounded (AG) fault: (a) phase-A current; (b) phase-B current; (c) phase-C current.
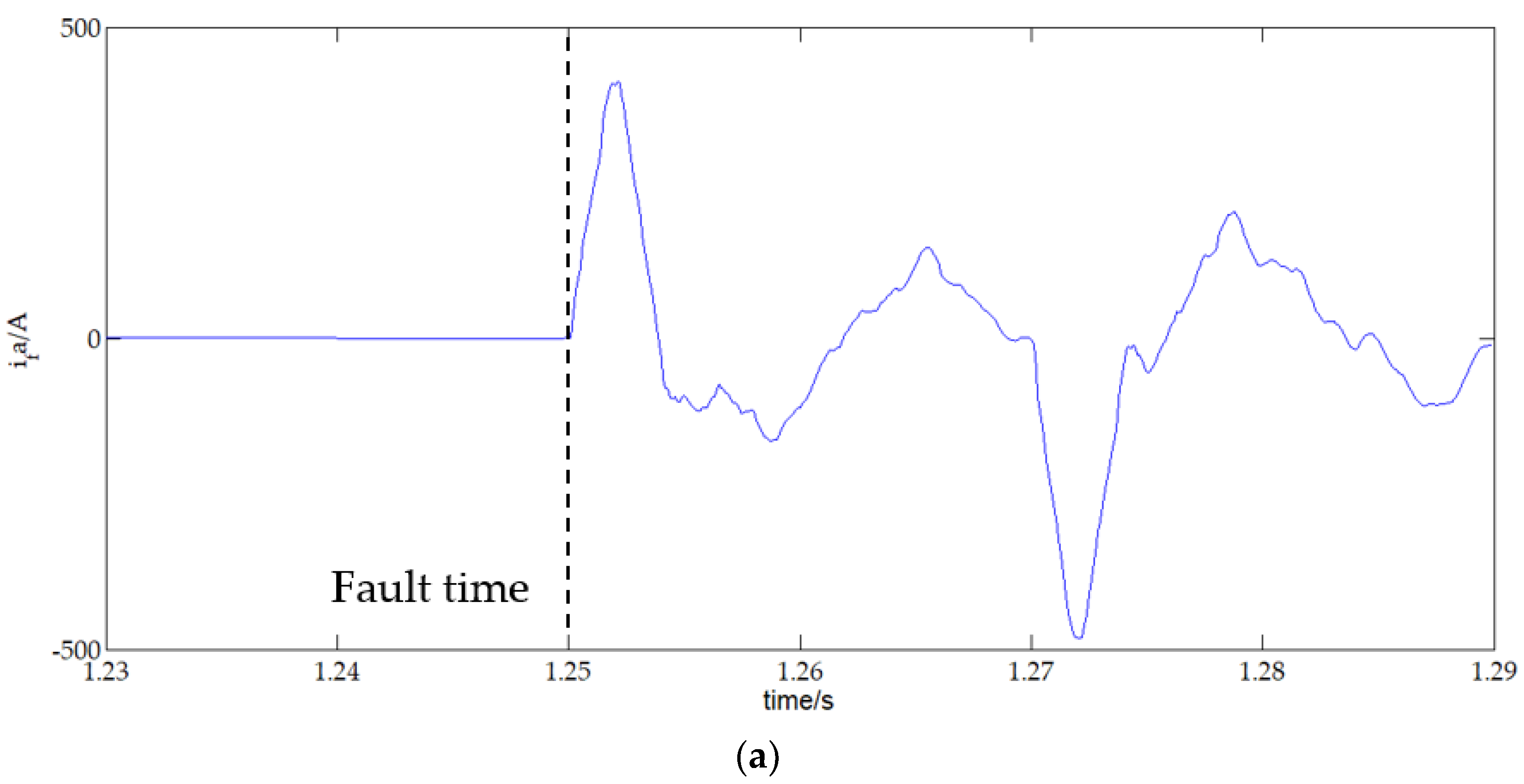
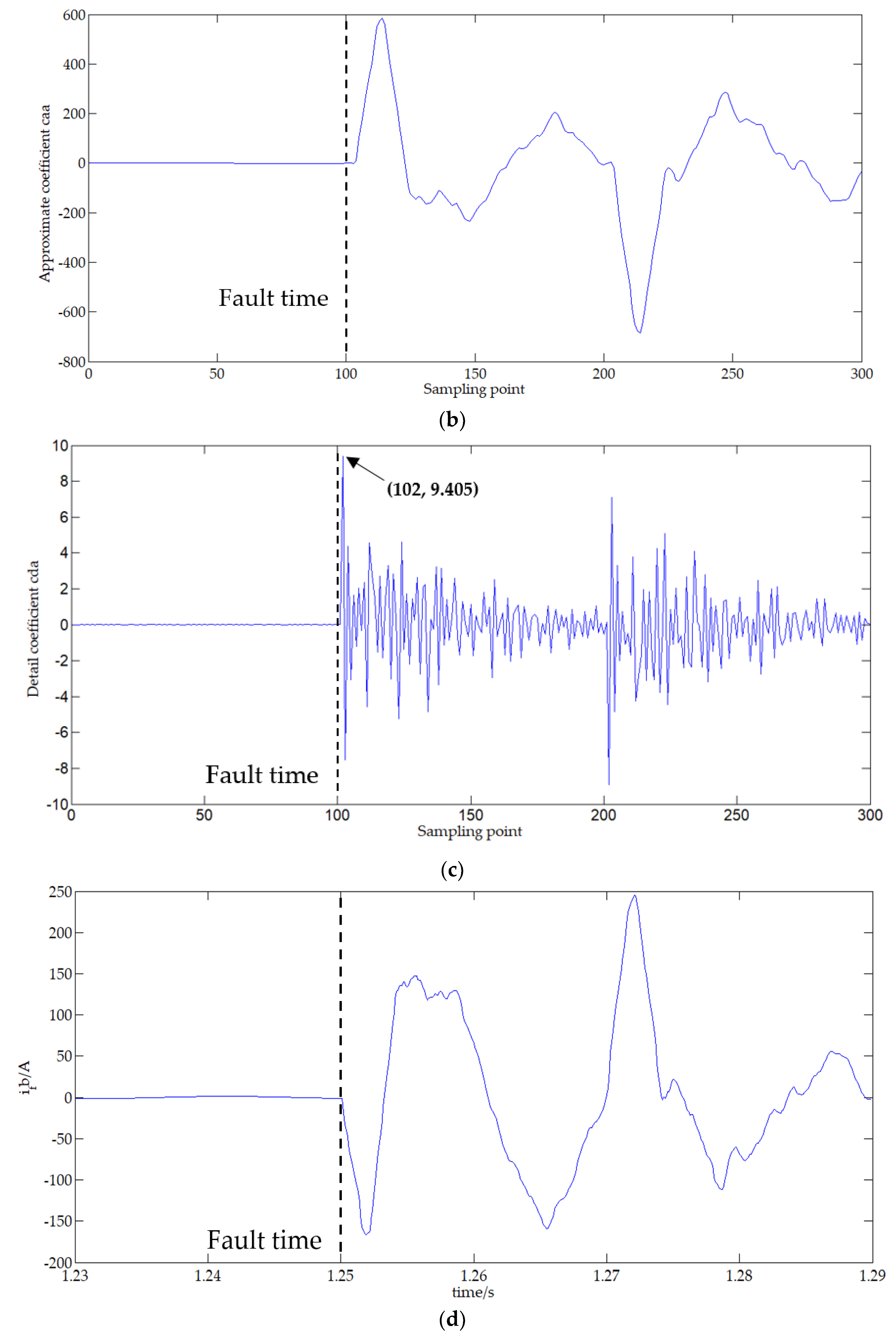
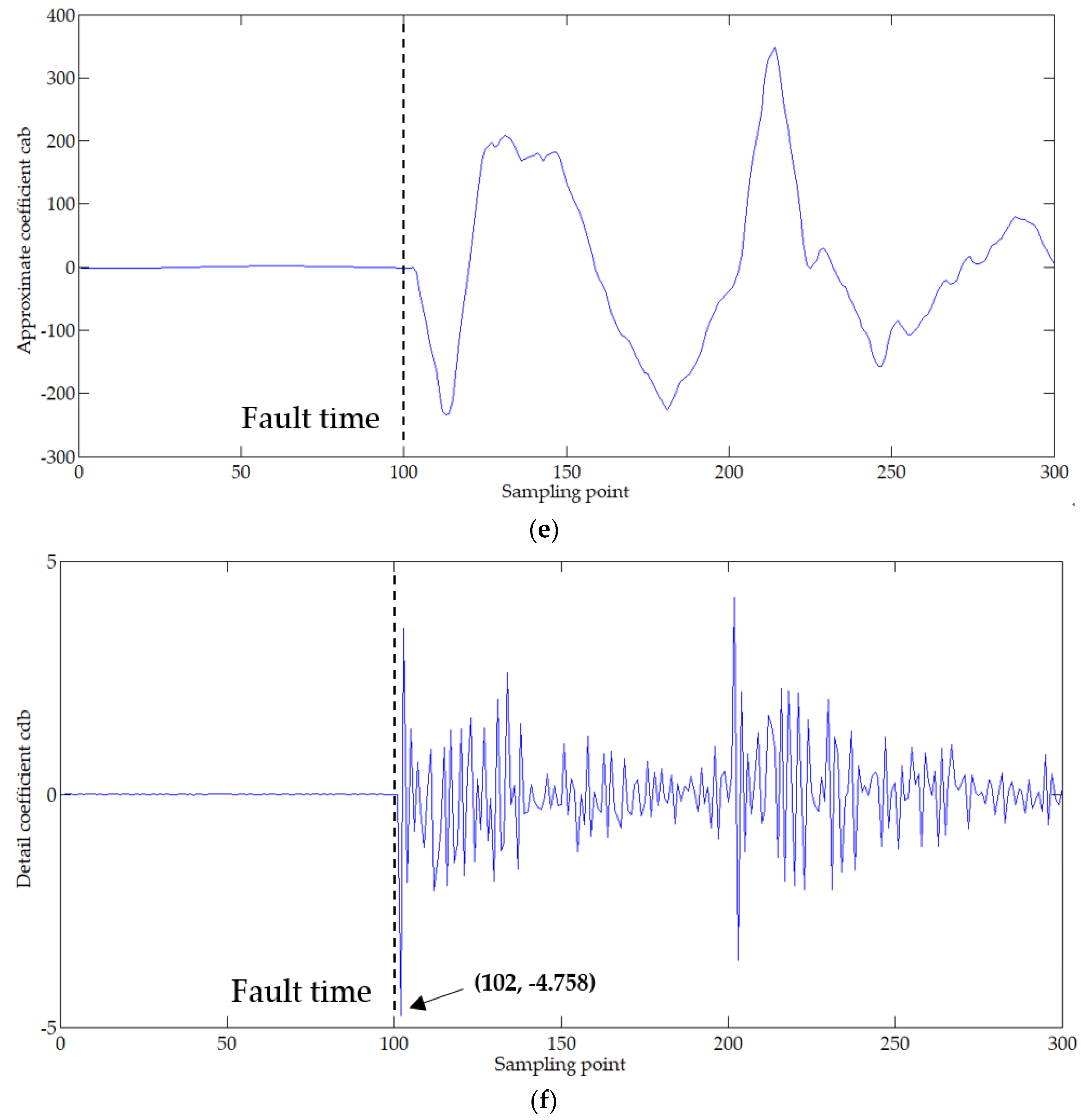
Figure 8.
AG fault and sound phase current signals under wavelet transform. Phase-A: (a) original phase current signal; (b) approximate coefficient; (c) detail coefficient; phase-B: (d) original phase current signal; (e) approximate coefficient; (f) detail coefficient.
Figure 8.
AG fault and sound phase current signals under wavelet transform. Phase-A: (a) original phase current signal; (b) approximate coefficient; (c) detail coefficient; phase-B: (d) original phase current signal; (e) approximate coefficient; (f) detail coefficient.
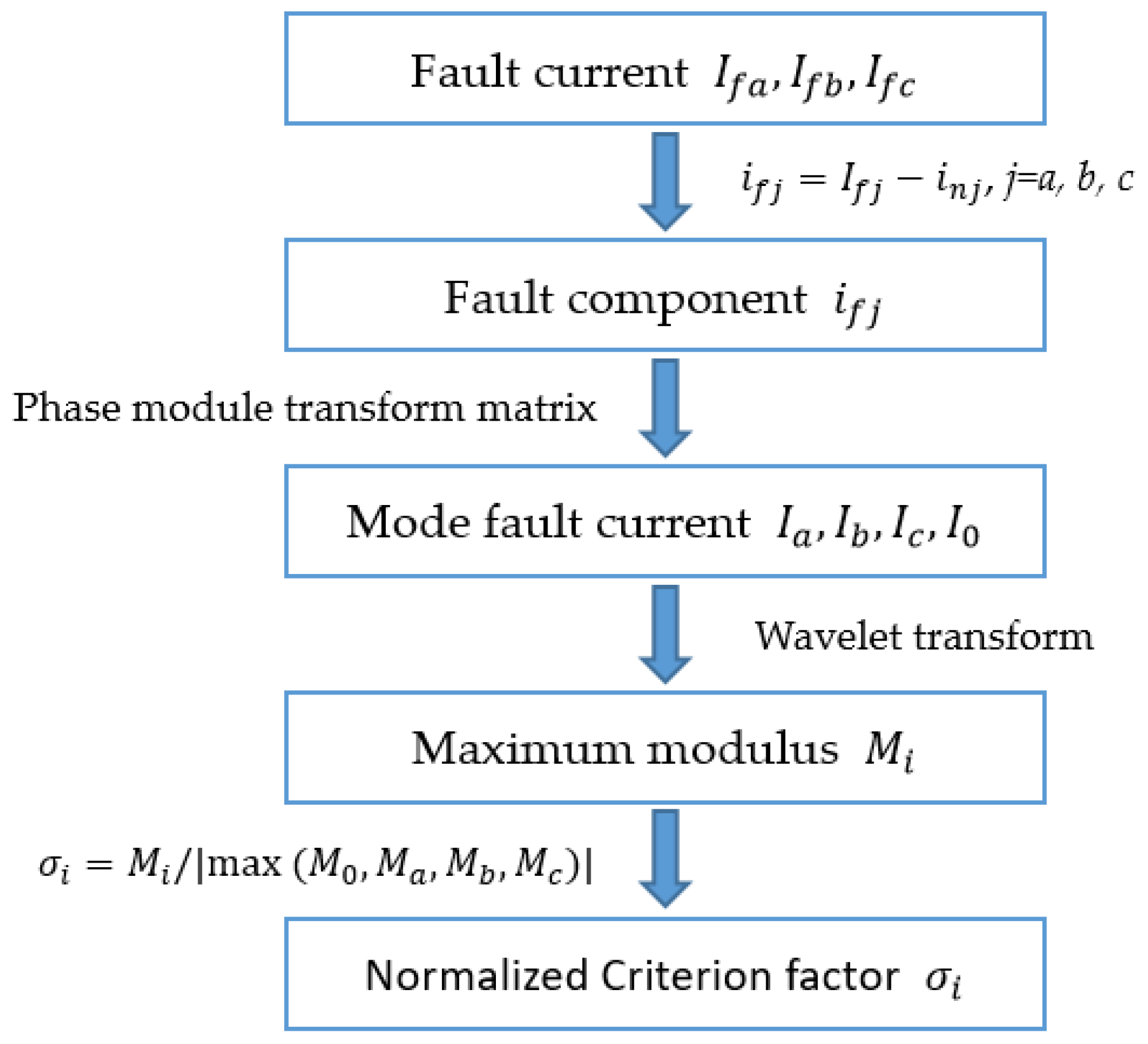
Figure 9.
Flowchart for processing fault current signal.
Figure 9.
Flowchart for processing fault current signal.
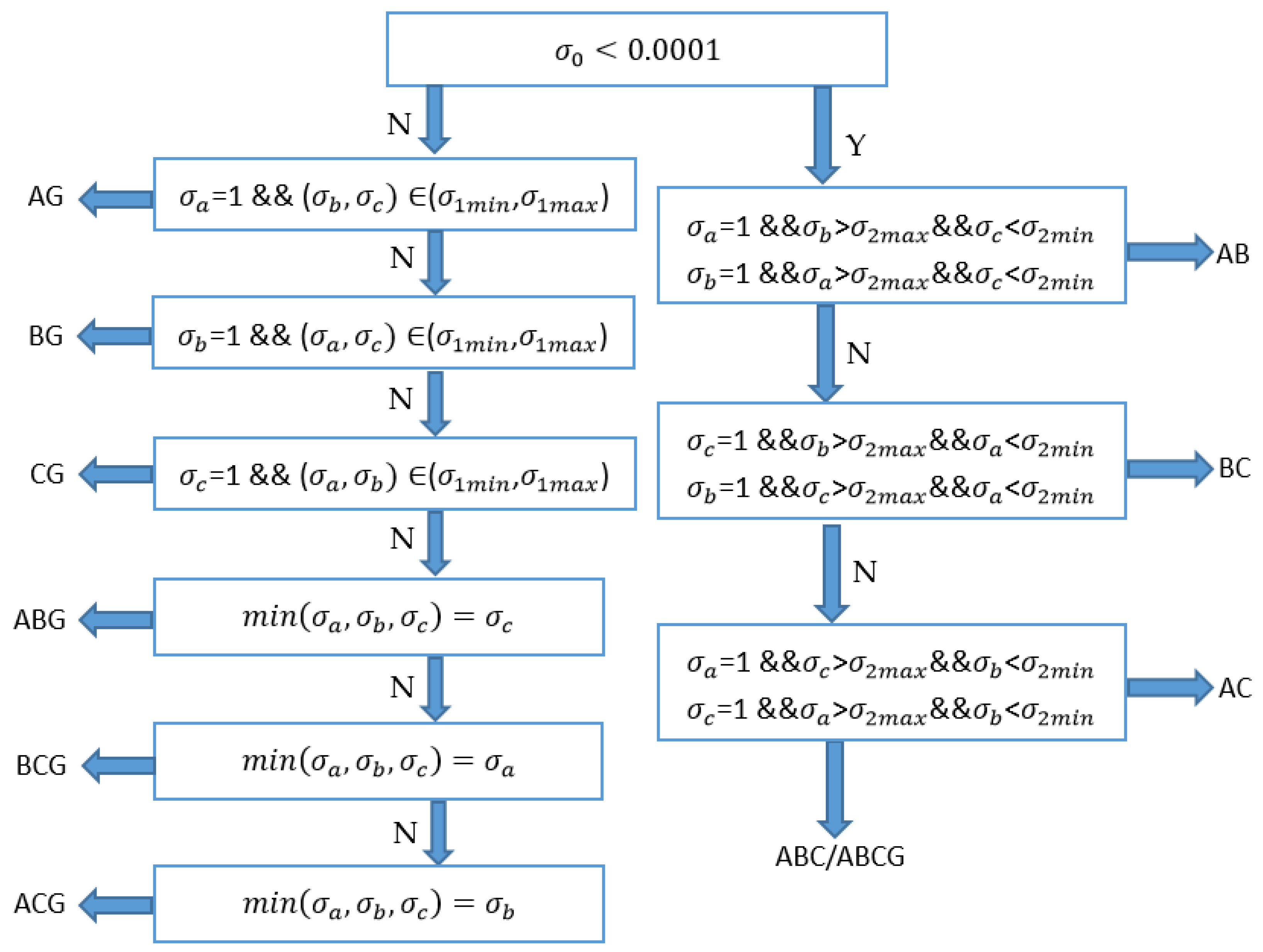
Figure 10.
Fault classification scheme.
Figure 10.
Fault classification scheme.
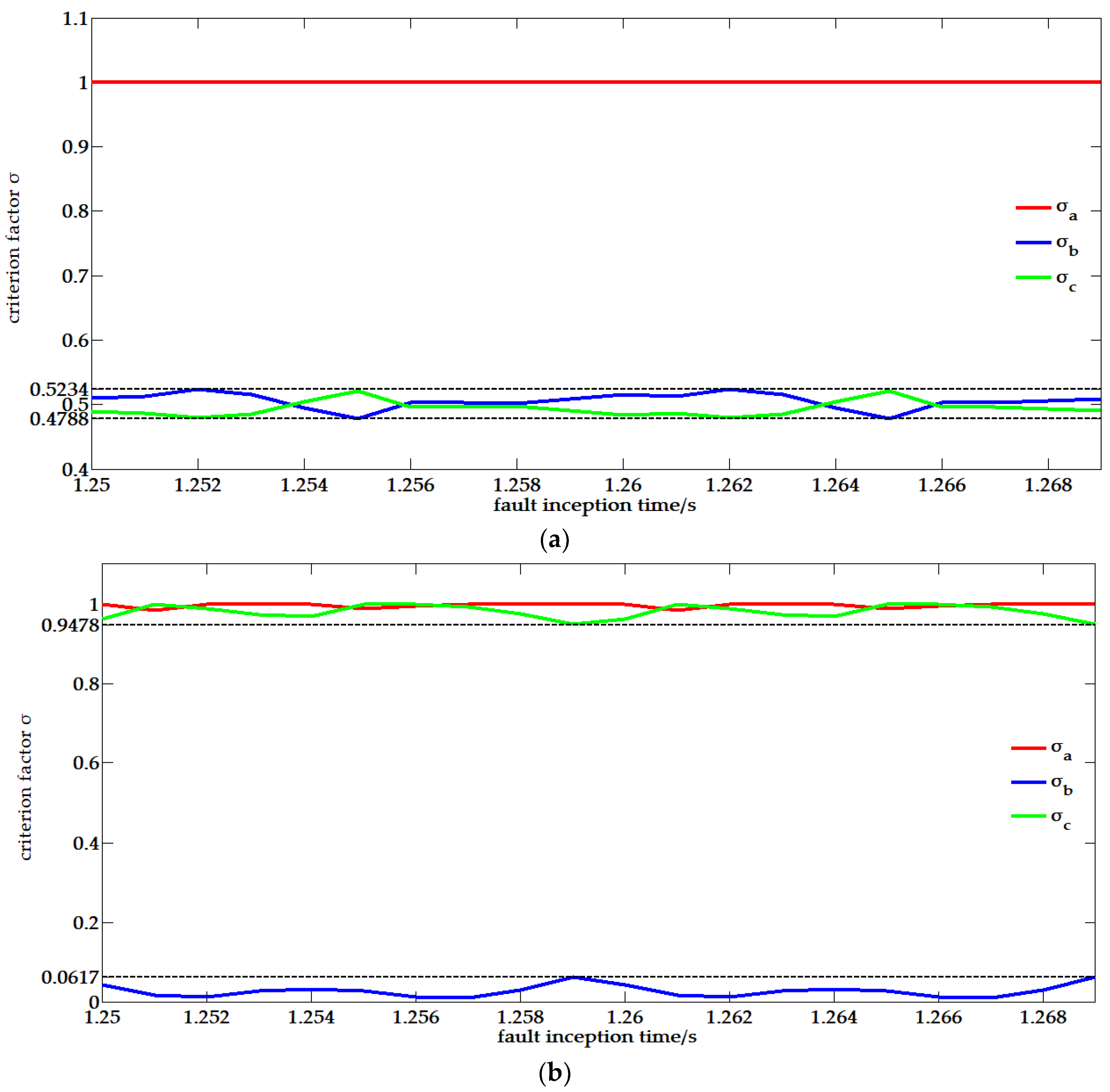
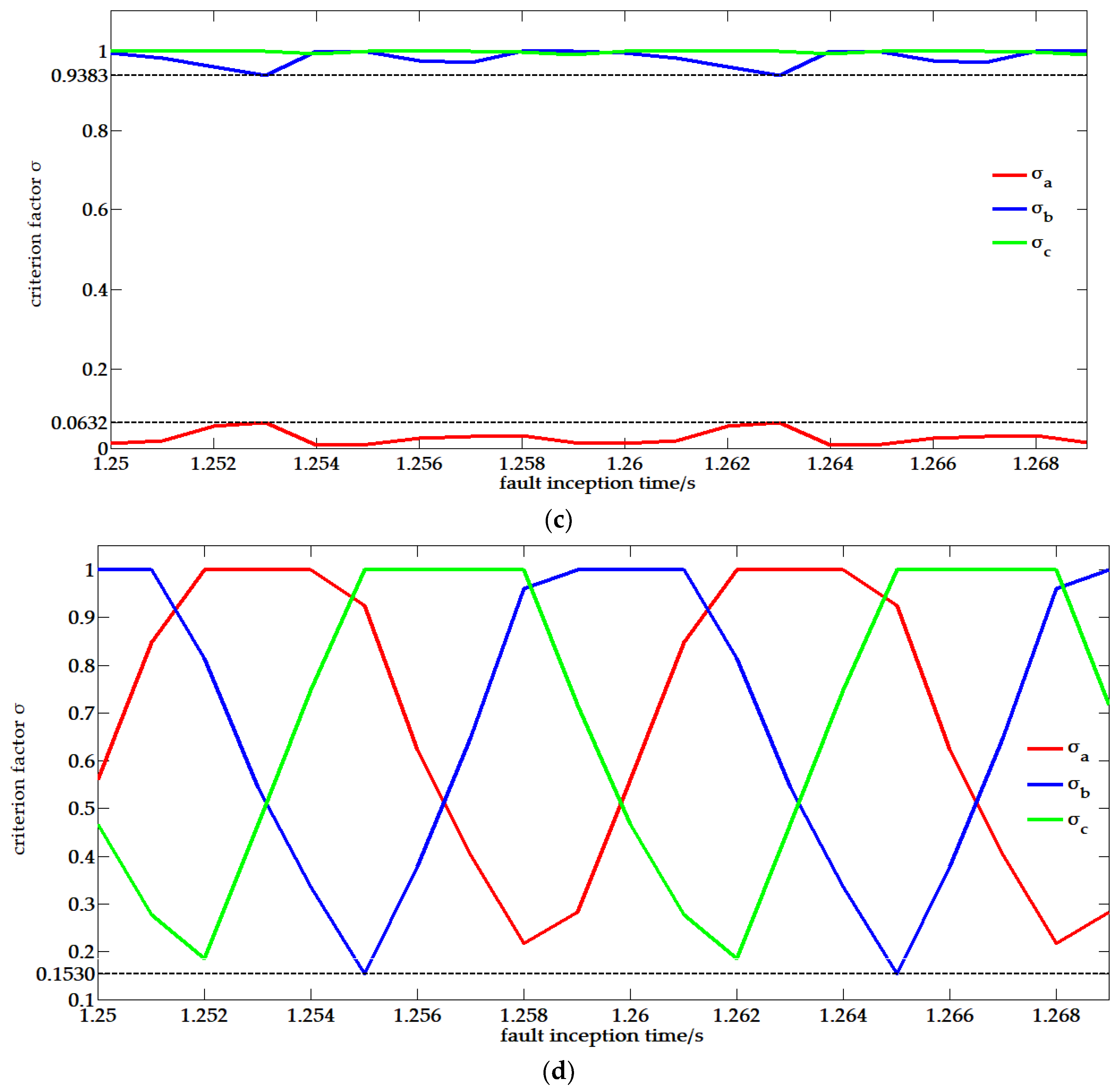
Figure 11.
Criterion factors of the different fault types with variable fault inception time of the whole cycle: (a) AG; (b) ACG; (c) BC; (d) ABC.
Figure 11.
Criterion factors of the different fault types with variable fault inception time of the whole cycle: (a) AG; (b) ACG; (c) BC; (d) ABC.
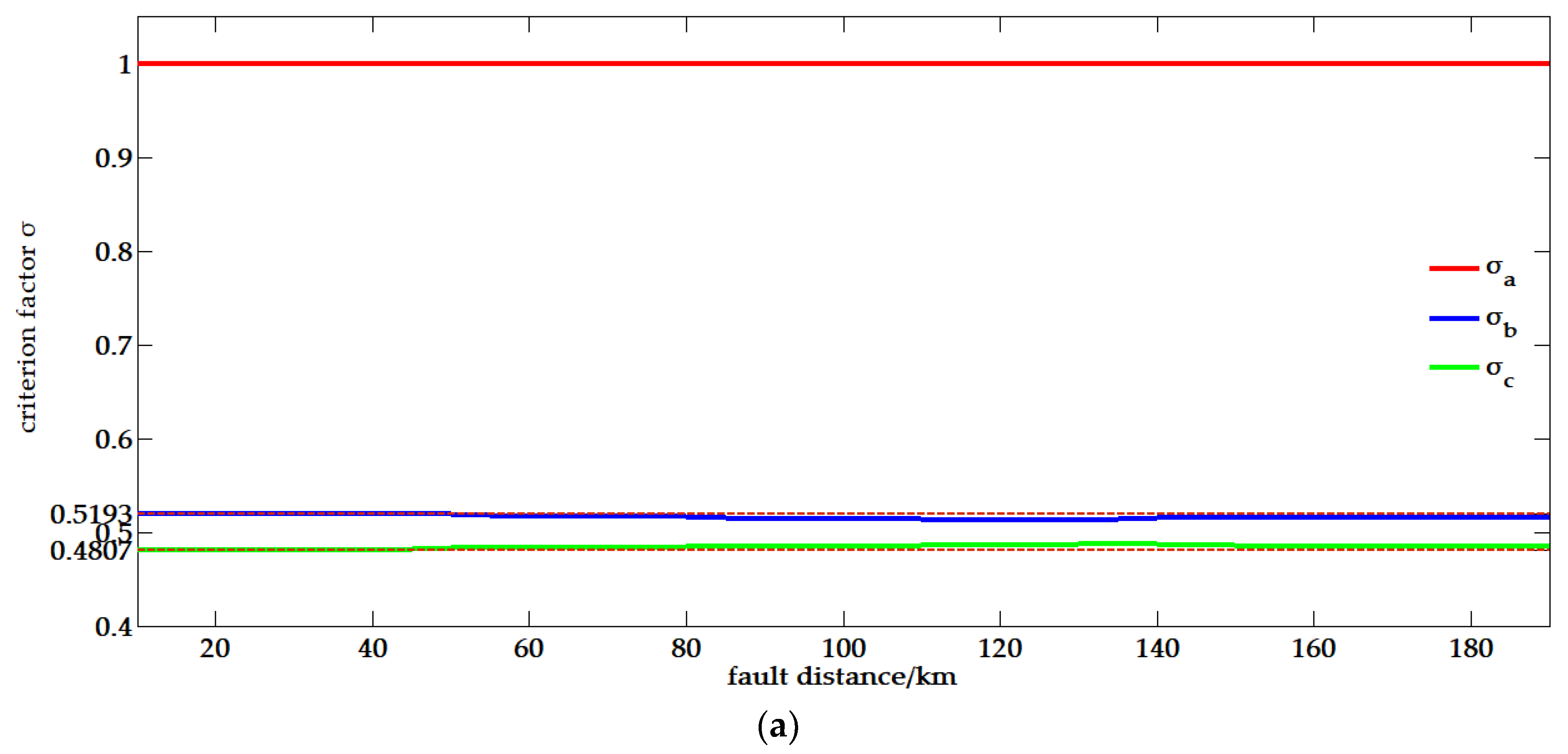
Figure 12.
Criterion factors of different fault types with variable fault distance from the bus, (a) AG; (b) ACG; (c) BC; (d) ABC.
Figure 12.
Criterion factors of different fault types with variable fault distance from the bus, (a) AG; (b) ACG; (c) BC; (d) ABC.
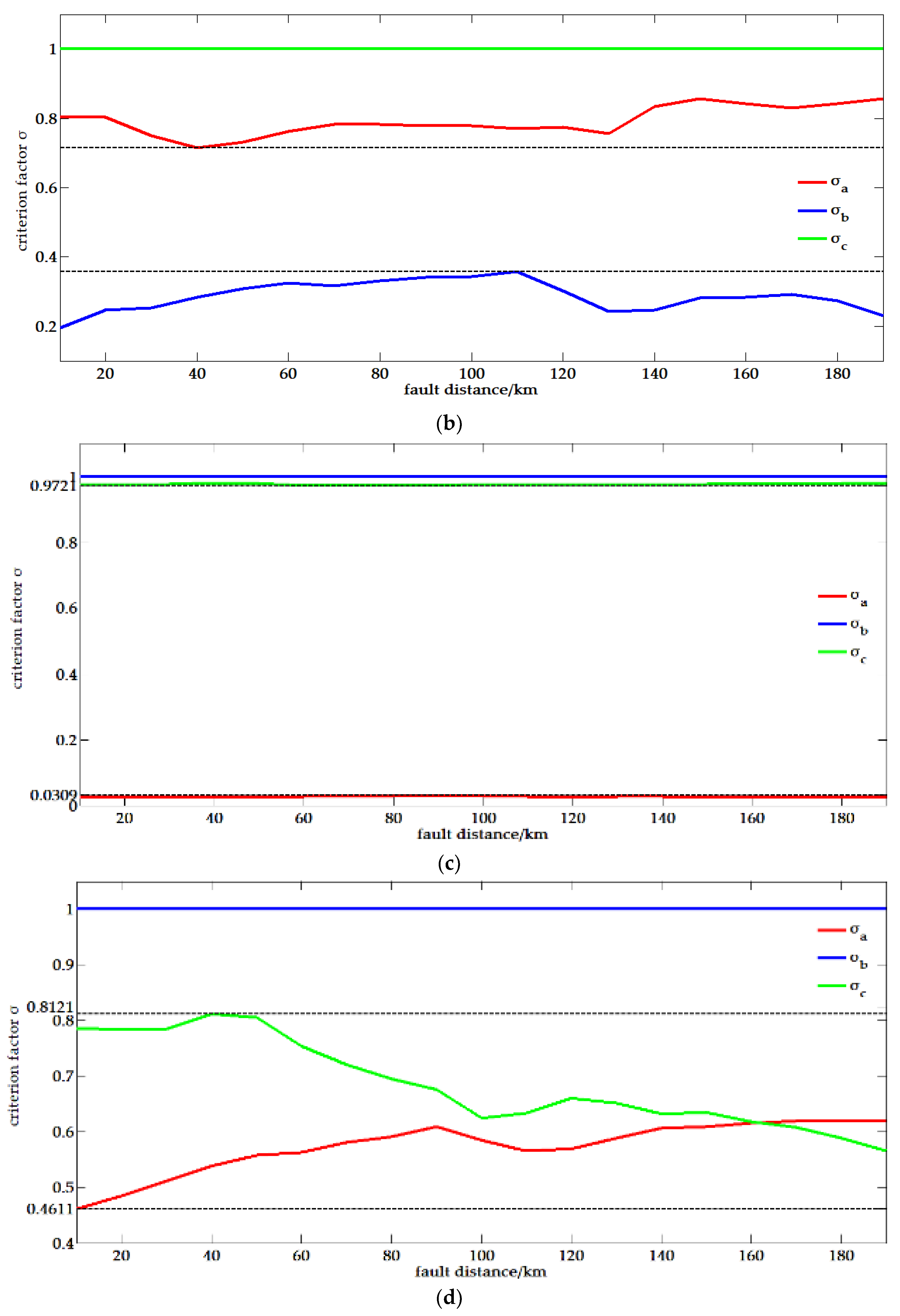
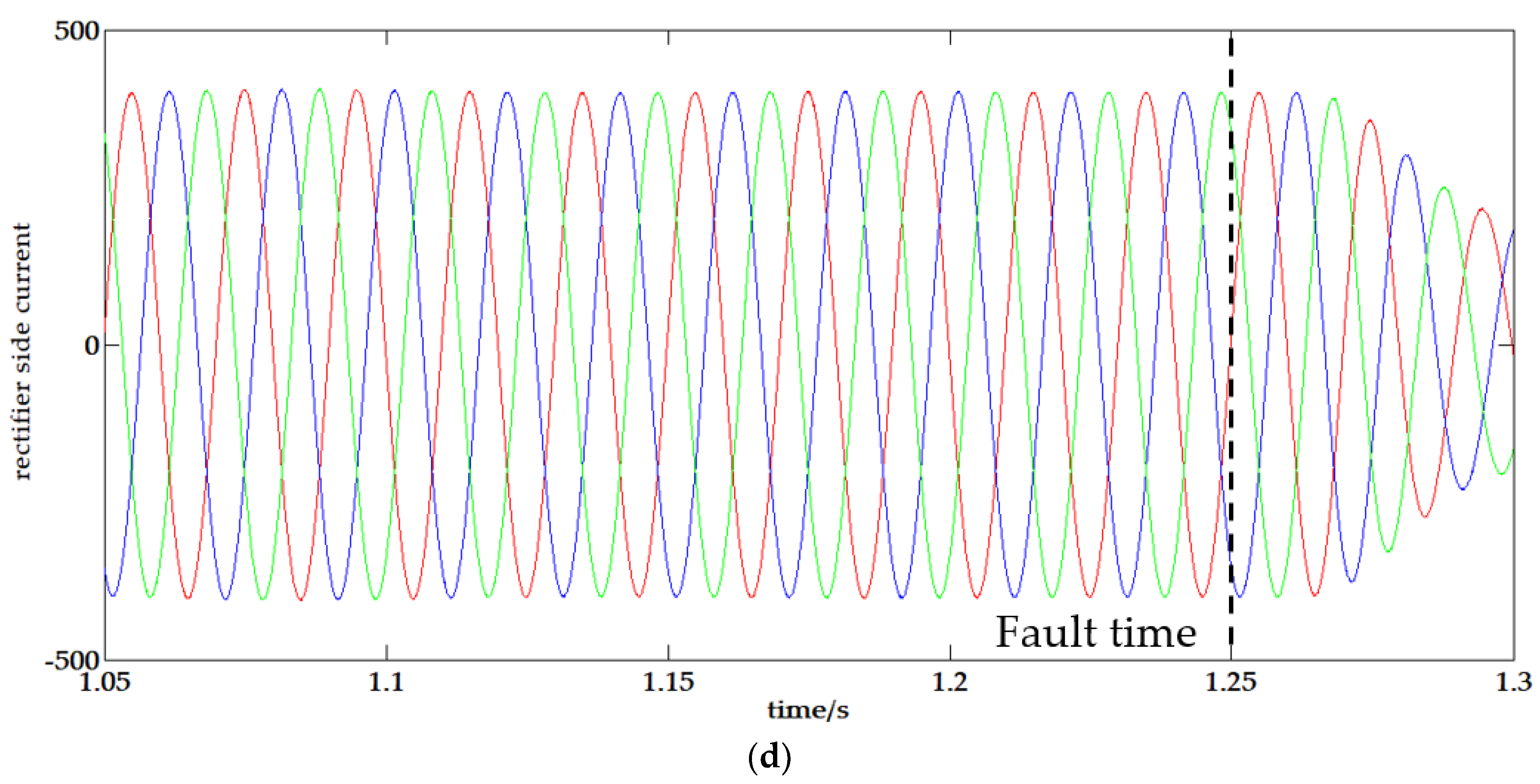
Figure 13.
Rectifier-side current under inverter-side faults: (a) AG; (b) ACG; (c) BC; (d) ABC. (Red line-phase A; Blue line-phase B; Green line-phase C).
Figure 13.
Rectifier-side current under inverter-side faults: (a) AG; (b) ACG; (c) BC; (d) ABC. (Red line-phase A; Blue line-phase B; Green line-phase C).
Figure 14.
Phase current measured at point M under phase-A grounded fault: (a) phase-A; (b) phase-B; (c) phase-C.
Figure 14.
Phase current measured at point M under phase-A grounded fault: (a) phase-A; (b) phase-B; (c) phase-C.
Table 1.
BTB MMC-HVDC system parameters.
Table 1.
BTB MMC-HVDC system parameters.
| System Parameters |
|---|
| DC voltage | ±420 kV | Submodule number | 60 |
| Rated power | 1250 MW | Bridge inductance | 140 mH |
| Short-circuit ratio | 20 | Internal grounding | Yg |
| AC voltage | 450 kV | AC line length | 200 km |
| Frequency | 50 Hz | Line resistance | 12.73 |
| Transformer voltage | 525 kV/450 kV | Line inductance | 0.9937 mH |
| Transformer grounding | Yn/yn | Line capacitance | 12.74 nF/km |
| Magnetization resistance | 99,866 | Magnetization inductance | 321.09 H |
| Winding resistance | 1.498 | Leakage inductance | 0.096326 H |
Table 2.
Characteristics of the mode fault current modulus.
Table 2.
Characteristics of the mode fault current modulus.
| Fault Type | Characteristics of the Mode Fault Current |
|---|
| Ia | Ib | Ic | I0 |
|---|
| AG | | | | ≠0 |
| BG | | | | ≠0 |
| CG | | | | ≠0 |
| ABG | | | | ≠0 |
| ACG | | | | ≠0 |
| BCG | | | | ≠0 |
| AB | | | 0 | 0 |
| AC | | 0 | | 0 |
| BC | 0 | | | 0 |
| ABCG | | | | 0 |
| ABC | | | | 0 |
Table 3.
Criterion factor of the calculated current of the different fault types (resistance R = 0.001 Ω, fault distance d = 100 km, fault inception time: A phase voltage cross zero [1.200 s]).
Table 3.
Criterion factor of the calculated current of the different fault types (resistance R = 0.001 Ω, fault distance d = 100 km, fault inception time: A phase voltage cross zero [1.200 s]).
| Fault Type | Window Length | | | | |
|---|
| AG | 1 ms | 1 | 0.5068 | 0.4932 | 0.0474 |
| 2 ms | 1 | 0.5085 | 0.4914 | 0.0795 |
| 3 ms | 1 | 0.5086 | 0.4914 | 0.1579 |
| 4 ms | 1 | 0.5086 | 0.4914 | 0.1879 |
| 5 ms | 1 | 0.5086 | 0.4914 | 0.1998 |
| ABG | 1 ms | 0.7861 | 1 | 0.2139 | 0.0234 |
| 2 ms | 1 | 0.9511 | 0.1713 | 0.0142 |
| 3 ms | 0.9994 | 1 | 0.1226 | 0.0101 |
| 4 ms | 0.9601 | 1 | 0.0928 | 0.0077 |
| 5 ms | 0.9536 | 1 | 0.0789 | 0.0065 |
| AC | 1 ms | 1 | 0.0334 | 0.9862 | 0 |
| 2 ms | 1 | 0.0362 | 0.9687 | 0 |
| 3 ms | 1 | 0.0362 | 0.9687 | 0 |
| 4 ms | 0.9803 | 0.0254 | 1 | 0 |
| 5 ms | 1 | 0.0341 | 0.9659 | 0 |
| ABC | 1 ms | 0.2226 | 1 | 0.7774 | 0 |
| 2 ms | 0.3992 | 1 | 0.6008 | 0 |
| 3 ms | 0.5922 | 1 | 0.4718 | 0 |
| 4 ms | 0.7814 | 1 | 0.4163 | 0 |
| 5 ms | 0.9820 | 1 | 0.3998 | 0 |
Table 4.
Criterion factor of the simulation current of the different fault types (resistance R = 0.001 Ω, fault distance d = 100 km, fault inception time: A phase voltage cross zero [1.200 s]).
Table 4.
Criterion factor of the simulation current of the different fault types (resistance R = 0.001 Ω, fault distance d = 100 km, fault inception time: A phase voltage cross zero [1.200 s]).
| Fault Type | | | | |
|---|
| AG | 1 | 0.5103 | 0.4897 | 0.0732 |
| BG | 0.4856 | 1 | 0.5144 | 0.0735 |
| CG | 0.4957 | 0.5043 | 1 | 0.0774 |
| ABG | 0.9017 | 1 | 0.1092 | 0.0142 |
| ACG | 0.7470 | 0.2826 | 1 | 0.0433 |
| BCG | 0.0464 | 1 | 0.9536 | 0.0037 |
| AB | 0.9858 | 1 | 0.0142 | 0 |
| AC | 1 | 0.0392 | 0.9643 | 0 |
| BC | 0.0186 | 1 | 0.9814 | 0 |
| ABCG | 0.2571 | 1 | 0.7429 | 0 |
| ABC | 0.2571 | 1 | 0.7429 | 0 |
Table 5.
Criterion factor of the different fault types with variable fault inception angle (resistance R = 0.001 Ω, fault distance d = 180 km from the bus).
Table 5.
Criterion factor of the different fault types with variable fault inception angle (resistance R = 0.001 Ω, fault distance d = 180 km from the bus).
| Fault Type | Fault Inception Angle | | | | | Fault Classification Result |
|---|
| AG | 1/5π | 1 | 0.5235 | 0.4801 | 0.0947 | AG |
| AG | 2/5π | 1 | 0.4953 | 0.5047 | 0.0812 | AG |
| AG | 1/2π | 1 | 0.4788 | 0.5212 | 0.0780 | AG |
| ACG | 1/5π | 1 | 0.0121 | 0.9879 | 0.0021 | ACG |
| ACG | 2/5π | 1 | 0.0319 | 0.9681 | 0.0041 | ACG |
| ACG | 1/2π | 0.9871 | 0.0264 | 1 | 0.0118 | ACG |
| BC | 1/5π | 0.0561 | 0.9594 | 1 | 0 | BC |
| BC | 2/5π | 0.0073 | 1 | 0.9927 | 0 | BC |
| BC | 1/2π | 0.0091 | 0.9970 | 1 | 0 | BC |
| ABC | 1/5π | 1 | 0.8152 | 0.1848 | 0 | ABC |
| ABC | 2/5π | 1 | 0.3348 | 0.7485 | 0 | ABC |
| ABC | 1/2π | 0.9245 | 0.1530 | 1 | 0 | ABC |
Table 6.
Criterion factor of different fault types with variable fault distance from the bus (resistance R = 100 Ω, fault inception time: A phase voltage cross zero [1.250 s]).
Table 6.
Criterion factor of different fault types with variable fault distance from the bus (resistance R = 100 Ω, fault inception time: A phase voltage cross zero [1.250 s]).
| Fault Type | Fault Distance | | | | | Fault Classification Result |
|---|
| AG | 20 km | 1 | 0.5190 | 0.4810 | 0.1446 | AG |
| AG | 100 km | 1 | 0.5129 | 0.4884 | 0.1216 | AG |
| AG | 180 km | 1 | 0.5159 | 0.4841 | 0.1016 | AG |
| ACG | 20 km | 0.8029 | 0.2467 | 1 | 0.0530 | ACG |
| ACG | 100 km | 0.7795 | 0.3429 | 1 | 0.0487 | ACG |
| ACG | 180 km | 0.8421 | 0.2727 | 1 | 0.0430 | ACG |
| BC | 20 km | 0.0262 | 1 | 0.9741 | 0 | BC |
| BC | 100 km | 0.0296 | 1 | 0.9762 | 0 | BC |
| BC | 180 km | 0.0253 | 1 | 0.9790 | 0 | BC |
| ABC | 20 km | 0.4837 | 1 | 0.7839 | 0 | ABC |
| ABC | 100 km | 0.5848 | 1 | 0.6244 | 0 | ABC |
| ABC | 180 km | 0.6191 | 1 | 0.5876 | 0 | ABC |
Table 7.
Criterion factor of the different fault types with variable resistance (fault distance d = 180 km from the bus, fault inception time: A phase voltage cross zero [1.250 s]).
Table 7.
Criterion factor of the different fault types with variable resistance (fault distance d = 180 km from the bus, fault inception time: A phase voltage cross zero [1.250 s]).
| Fault Type | Fault Resistance | | | | | Fault Classification Result |
|---|
| AG | 0.001 | 1 | 0.5157 | 0.4843 | 0.0999 | AG |
| AG | 100 | 1 | 0.5159 | 0.4841 | 0.1016 | AG |
| AG | 500 | 1 | 0.5193 | 0.4808 | 0.1025 | AG |
| ACG | 0.001 | 1 | 0.0420 | 0.9624 | 0.0542 | ACG |
| ACG | 100 | 0.8421 | 0.2727 | 1 | 0.0430 | ACG |
| ACG | 500 | 0.9451 | 0.1073 | 1 | 0.0222 | ACG |
| BC | 0.001 | 0.0113 | 0.9952 | 1 | 0 | BC |
| BC | 100 | 0.0253 | 1 | 0.9790 | 0 | BC |
| BC | 500 | 0.0168 | 1 | 0.9917 | 0 | BC |
| ABC | 0.001 | 0.5606 | 1 | 0.4675 | 0 | ABC |
| ABC | 100 | 0.6191 | 1 | 0.5876 | 0 | ABC |
| ABC | 500 | 0.4846 | 1 | 0.6127 | 0 | ABC |
Table 8.
Criterion factor of DC faults F2 and F3 with variable fault inception time (resistance R = 0.001 Ω, F2+ means a positive pole-to-ground fault, F2− denotes a negative pole-to-ground fault).
Table 8.
Criterion factor of DC faults F2 and F3 with variable fault inception time (resistance R = 0.001 Ω, F2+ means a positive pole-to-ground fault, F2− denotes a negative pole-to-ground fault).
| Fault Type | Fault Inception Angle | | | | |
|---|
| F2+ | 0 | 0.0007 | 0.0023 | 0.0021 | 1 |
| F2+ | 1/5π | 0.0017 | 0.0025 | 0.0012 | 1 |
| F2+ | 2/5π | 0.0025 | 0.0018 | 0.0009 | 1 |
| F2- | 0 | 0.0010 | 0.0023 | 0.0021 | 1 |
| F2− | 1/5π | 0.0017 | 0.0025 | 0.0009 | 1 |
| F2− | 2/5π | 0.0025 | 0.0018 | 0.0010 | 1 |
| F3 | 0 | 0.9228 | 1 | 0.1526 | 0 |
| F3 | 1/5π | 1 | 0.4632 | 0.5368 | 0 |
| F3 | 2/5π | 0.8472 | 0.1528 | 1 | 0 |
Table 9.
Criterion factor of the inverter-side faults.
Table 9.
Criterion factor of the inverter-side faults.
| Fault Type | | | | |
|---|
| AG | 0.0212 | 0.0465 | 0.0676 | 1 |
| ACG | 0.0155 | 0.0340 | 0.0494 | 1 |
| BC | 0.3145 | 0.6869 | 1 | 0.0898 |
| ABC | 0.3145 | 0.6869 | 1 | 0.1087 |
| Normal | 0.3163 | 0.6848 | 1 | 0.0033 |
Table 10.
Contrast test under Q control mode (resistance R = 0.001 Ω, fault distance d = 100 km, fault inception time: A phase voltage cross zero [1.200 s]).
Table 10.
Contrast test under Q control mode (resistance R = 0.001 Ω, fault distance d = 100 km, fault inception time: A phase voltage cross zero [1.200 s]).
| Fault Type | | | | |
|---|
| AG | 1 | 0.5182 | 0.4818 | 0.0609 |
| BG | 0.4967 | 1 | 0.5034 | 0.0628 |
| CG | 0.4980 | 0.5020 | 1 | 0.0548 |
| ABG | 0.9879 | 1 | 0.0121 | 0.0011 |
| ACG | 0.9704 | 0.0434 | 1 | 0.0050 |
| BCG | 0.0100 | 1 | 0.9900 | 0.0004 |
| AB | 0.9959 | 1 | 0.0041 | 0 |
| AC | 1 | 0.0159 | 0.9894 | 0 |
| BC | 0.0063 | 1 | 0.9937 | 0 |
| ABCG | 0.2857 | 1 | 0.7143 | 0 |
| ABC | 0.2571 | 1 | 0.7429 | 0 |
Table 11.
Test result with different power load: (a) P = 0.1 p.u. Q = 0; (b) P = 0.25 p.u. Q = 0; (c) P = 0.2 p.u. Q = 0.1 (resistance R = 0.001 Ω, fault distance d = 100 km, fault inception time: A phase voltage cross zero [1.200 s]).
Table 11.
Test result with different power load: (a) P = 0.1 p.u. Q = 0; (b) P = 0.25 p.u. Q = 0; (c) P = 0.2 p.u. Q = 0.1 (resistance R = 0.001 Ω, fault distance d = 100 km, fault inception time: A phase voltage cross zero [1.200 s]).
| (a) |
| Fault Type | | | | |
| AG | 1 | 0.4899 | 0.5101 | 0.7317 |
| BG | 0.5001 | 1 | 0.4999 | 0.8036 |
| CG | 0.5005 | 0.4995 | 1 | 0.7270 |
| ABG | 0.9857 | 1 | 0.0143 | 0.0124 |
| ACG | 1 | 0.0177 | 0.9823 | 0.0279 |
| BCG | 0.0130 | 1 | 0.9870 | 0.0027 |
| AB | 0.9938 | 1 | 0.0062 | 0 |
| AC | 1 | 0.0349 | 0.9651 | 0 |
| BC | 0.0111 | 1 | 0.9889 | 0 |
| ABCG | 0.2137 | 1 | 0.7863 | 0 |
| ABC | 0.2137 | 1 | 0.7863 | 0 |
| (b) |
| Fault Type | | | | |
| AG | 1 | 0.4971 | 0.5029 | 0.7376 |
| BG | 0.5065 | 1 | 0.4939 | 0.7936 |
| CG | 0.4940 | 0.5060 | 1 | 0.7292 |
| ABG | 0.9855 | 1 | 0.0145 | 0.0111 |
| ACG | 1 | 0.0213 | 0.9884 | 0.0365 |
| BCG | 0.0154 | 1 | 0.9846 | 0.0033 |
| AB | 0.9926 | 1 | 0.0074 | 0 |
| AC | 1 | 0.0331 | 0.9669 | 0 |
| BC | 0.0131 | 1 | 0.9869 | 0 |
| ABCG | 0.2113 | 1 | 0.7887 | 0 |
| ABC | 0.2113 | 1 | 0.7887 | 0 |
| (c) |
| Fault Type | | | | |
| AG | 1 | 0.5012 | 0.4988 | 0.7347 |
| BG | 0.4996 | 1 | 0.5004 | 0.7931 |
| CG | 0.4929 | 0.5071 | 1 | 0.7216 |
| ABG | 0.9848 | 1 | 0.0152 | 0.0115 |
| ACG | 1 | 0.0189 | 0.9891 | 0.0333 |
| BCG | 0.0133 | 1 | 0.9867 | 0.0030 |
| AB | 0.9923 | 1 | 0.0077 | 0 |
| AC | 1 | 0.0306 | 0.9694 | 0 |
| BC | 0.0112 | 1 | 0.9888 | 0 |
| ABCG | 0.2296 | 1 | 0.7704 | 0 |
| ABC | 0.2296 | 1 | 0.7704 | 0 |
Table 12.
Detection time comparison of fault diagnosis methods.
Table 12.
Detection time comparison of fault diagnosis methods.
| Fault Diagnosis Method | Main Technique | Detection Time |
|---|
| Reference 9 | Phase current difference | 20 ms |
| Reference 10 | Change rate of phase current phasor | 5 ms |
| Reference 11 | Time-frequency characteristics of transient travelling wave | 2.5 ms |
| Reference 12 | Artificial immune algorithm & transient current energy | 5 ms |
| Reference 14 | Renyi wavelet packet time entropy | 20 ms |
| This paper | DWT & Modulus maxima | 1 ms |

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






















