1. Introduction
Permanent magnet synchronous motors (PMSMs) are widely employed in industrial drives, electric vehicles, renewable energy systems, etc., owing to their high torque density, high power density, and high efficiency [
1]. The motors, primarily applied in drones and fans, are of the outer rotor type, in which the rotor is located outside and the stator is located inside. These motor types are surface-mounted permanent magnet synchronous motors (SPMSMs) with the same
d-axis inductance and
q-axis inductance. The torque is generated only by the
q-axis current. In outer-rotor-type motors, the stator is located inside and temperature rises may occur and, as such, turn faults may occur as well. The life of the motor can be reduced by approximately 50% for every 10 °C increase in the stator winding temperature design limit [
2,
3]. The motor parameters are dependent on current and temperature. Due to high temperatures, or high currents, turn faults [
4,
5,
6] in the stator may occur. Current can be easily measured using the current sensors of the inverter. However, it is difficult to obtain the internal temperature of the motor, especially that of the stator winding.
Among all temperature monitoring methods, the most accurate is to insulate temperature sensors [
3]. However, the insulation of the temperature sensor is not cost-effective and temperature sensor reliability problems may occur. Motor internal temperature estimation methods can be classified into thermal model methods [
7,
8,
9,
10], and motor parameter estimation methods [
11,
12,
13,
14,
15]. The lumped-parameter thermal network [
7] is the most well-known thermal model method. The thermal model system is an eighth-order dynamic model, with many thermal capacitances and resistances, either directly acquired from various experimental tests, or derived from the dimensions and material thermal properties of the motor. However, with some assumptions in place, a few simplified thermal models have been proposed [
8,
9,
10]. The computations are less complicated, but the thermal models are still significant with many model parameters able to be identified from simulations and experimental tests. The thermal model is highly dependent on the cooling system and the geometry of the motor, and specific analysis for each motor design and application is required. These results lead to limited applications and require long development times. In the parameter estimation method, stator resistance is used as the indicator of the stator winding temperature. This approach has significant advantages over the thermal model method. The accuracy of the stator temperature estimation is not affected by the motor specifications, cooling method, or operating conditions [
11,
12], and the stator resistance can be estimated from the electrical equivalent model of the motor [
13]. However, the stator resistance is significantly small and the performance of the temperature estimation is too sensitive to motor inductance variations [
2]. To improve the accuracy of the stator resistance estimation, an inductance map and back electromotive force (BEMF) map are required. The inductance map and BEMF map are identified from the simulations and experimental results. These factors lead to long development times being required.
This paper presents a stator winding temperature estimation method for motor systems without additional temperature sensors. To obtain the stator winding temperature, the motor parameters are estimated. The estimated parameters enable the stator winding temperature to be obtained because the parameters vary with temperature. For the motor parameter estimation, the
d-axis current injection method is proposed. This paper is organized as follows: the principles and analysis of the SPMSM operation are presented in
Section 2; the proposed estimation method is analyzed in
Section 3; simulation and experimental results are described in
Section 4 and
Section 5 to evaluate the performance of the temperature estimation; and finally, conclusions are presented in
Section 6.
2. Operations of PMSMs
The fundamental model of PMSMs in the synchronous reference frame is given by [
14,
15,
16]:
where
ved,q and
ied,q are the
d-,
q-axis stator voltage and current vectors in the synchronous reference frame, respectively.
Rs and
Ld,q are the stator resistance and
d-,
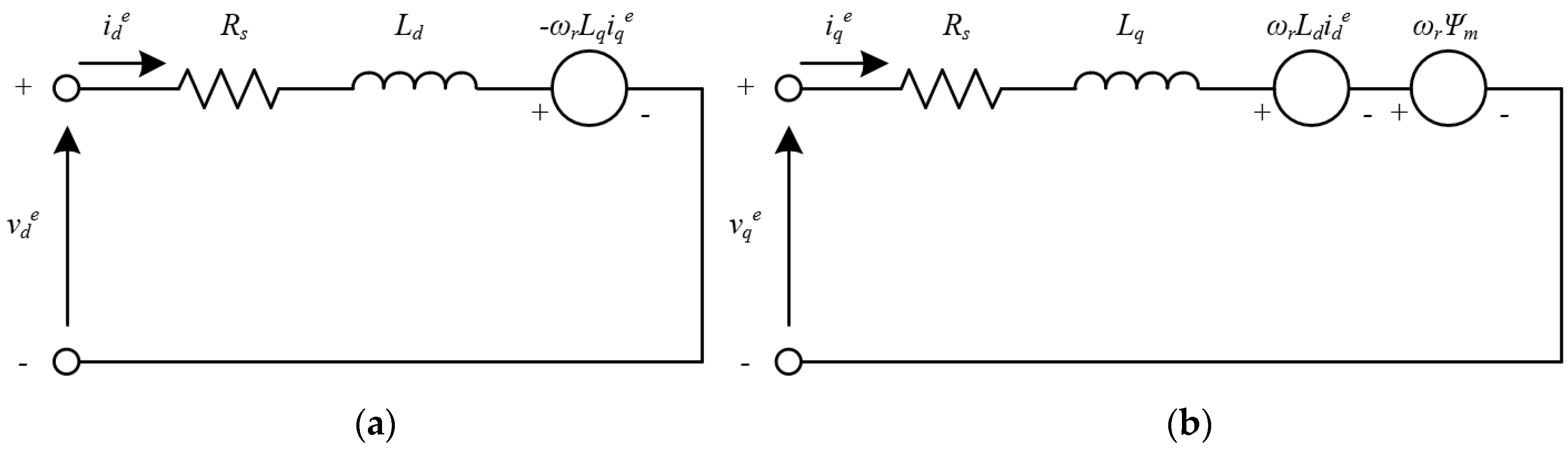
q-axis inductance. The equivalent circuit of PMSMs is shown in
Figure 1. The motor speed and the rotor flux are denoted by
ωr and
ψm, respectively.
p and
P are the differential operator and the motor poles, respectively.
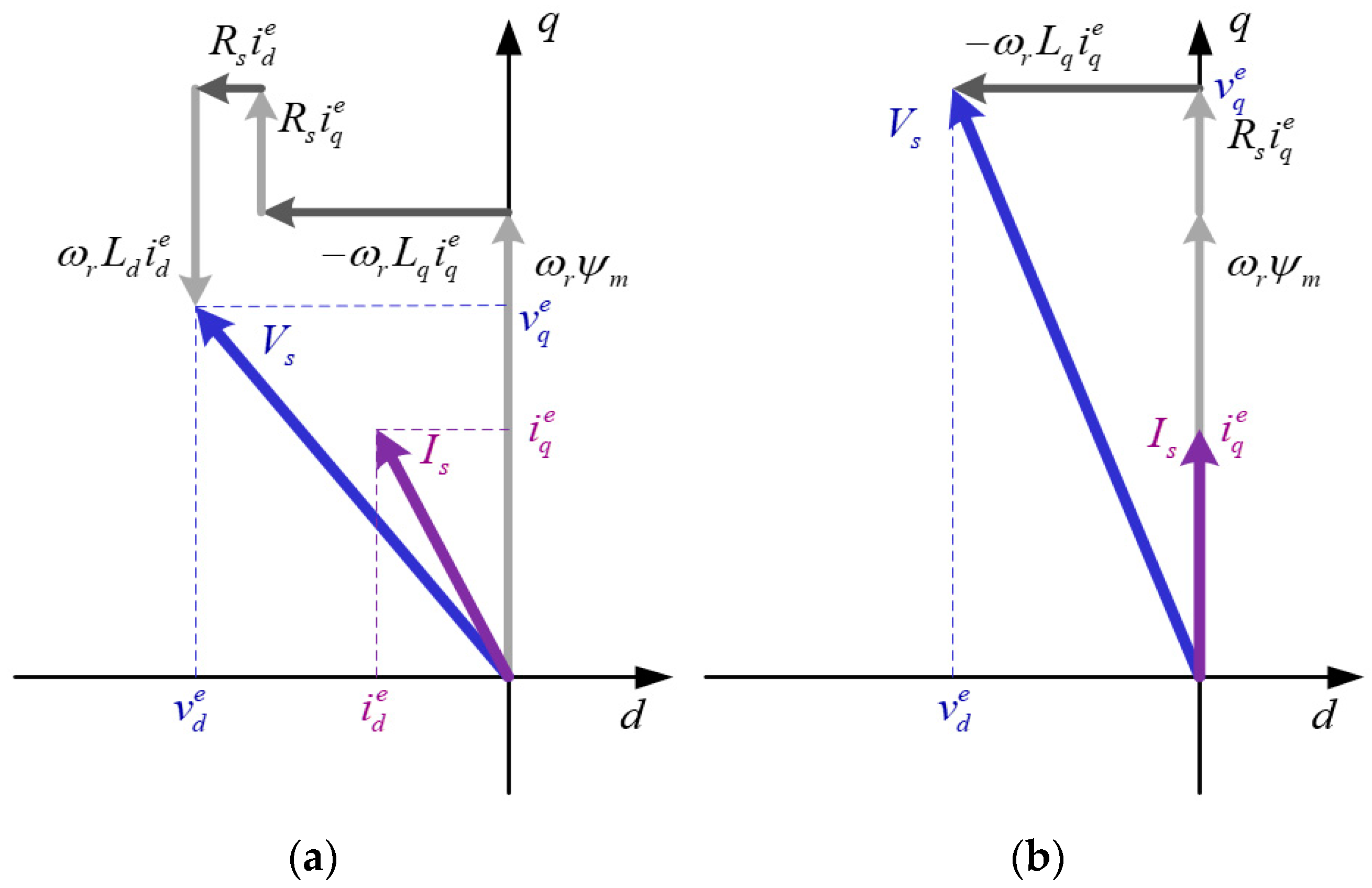
Assuming the steady-state condition, voltage Equation (1) can be approximated as Equation (2). It is noteworthy that
ωrLd,qied,q are the coupling terms, and that
ωrψm is the BEMF voltage. Based on Equation (2), the voltage and current vectors are described in
Figure 2 [
16].
As shown in Equation (1), the electrical torque is composed of the magnetic torque and the reluctance torque. The magnetic torque is from the Lorentz force, and the reluctance torque is oriented from the
Ld,
Lq asymmetry [
17,
18]. Because the inductances
Ld,
Lq are equal for the SPMSMs, the reluctance torque becomes zero, and the torque equation can be rewritten as
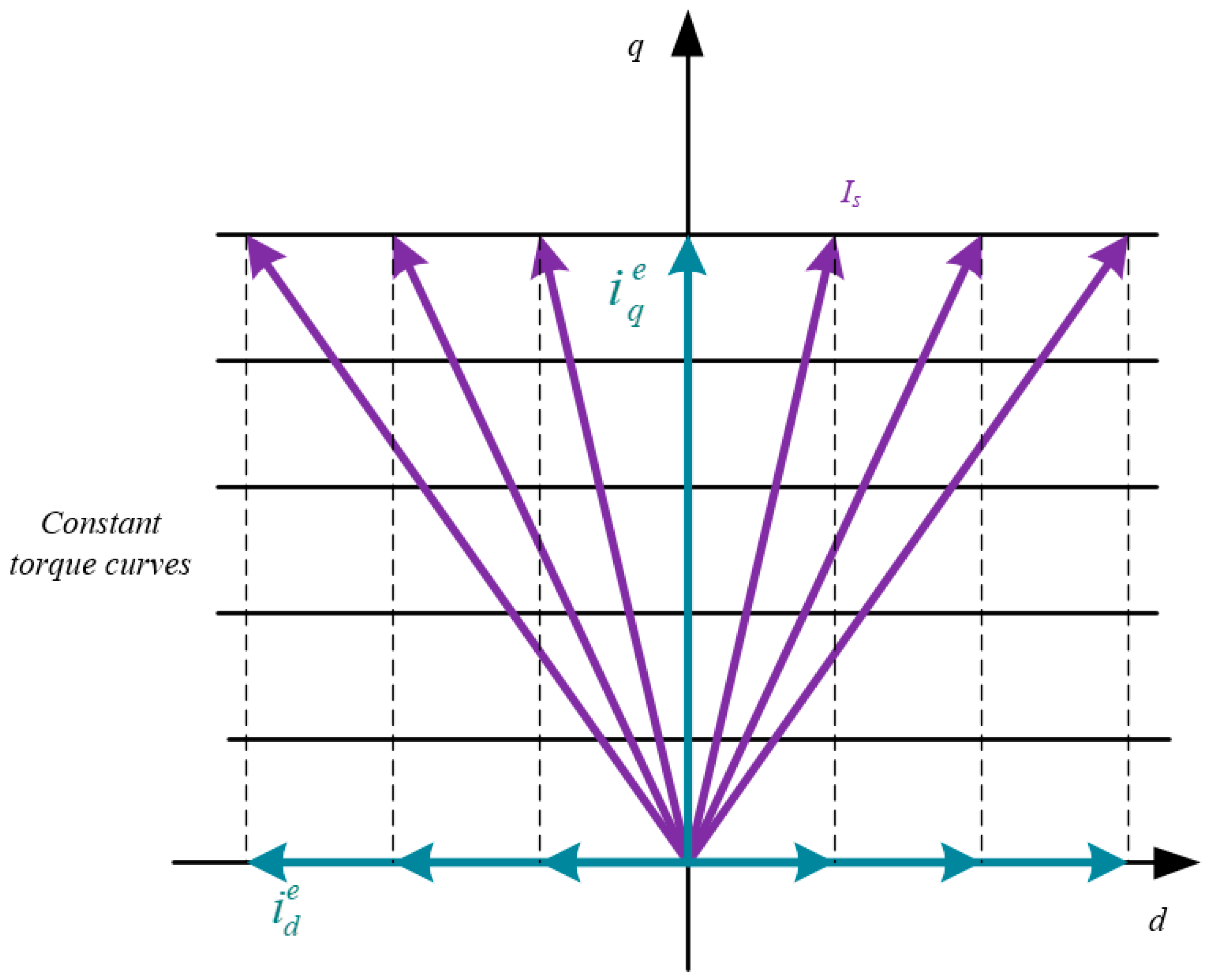
The electrical torque for the SPMSMs can be controlled using the
q-axis current. The constant torque curves of the SPMSMs are shown in
Figure 3. The torque of the SPMSMs is generated by the
q-axis current and the
d-axis current does not contribute to torque generation.
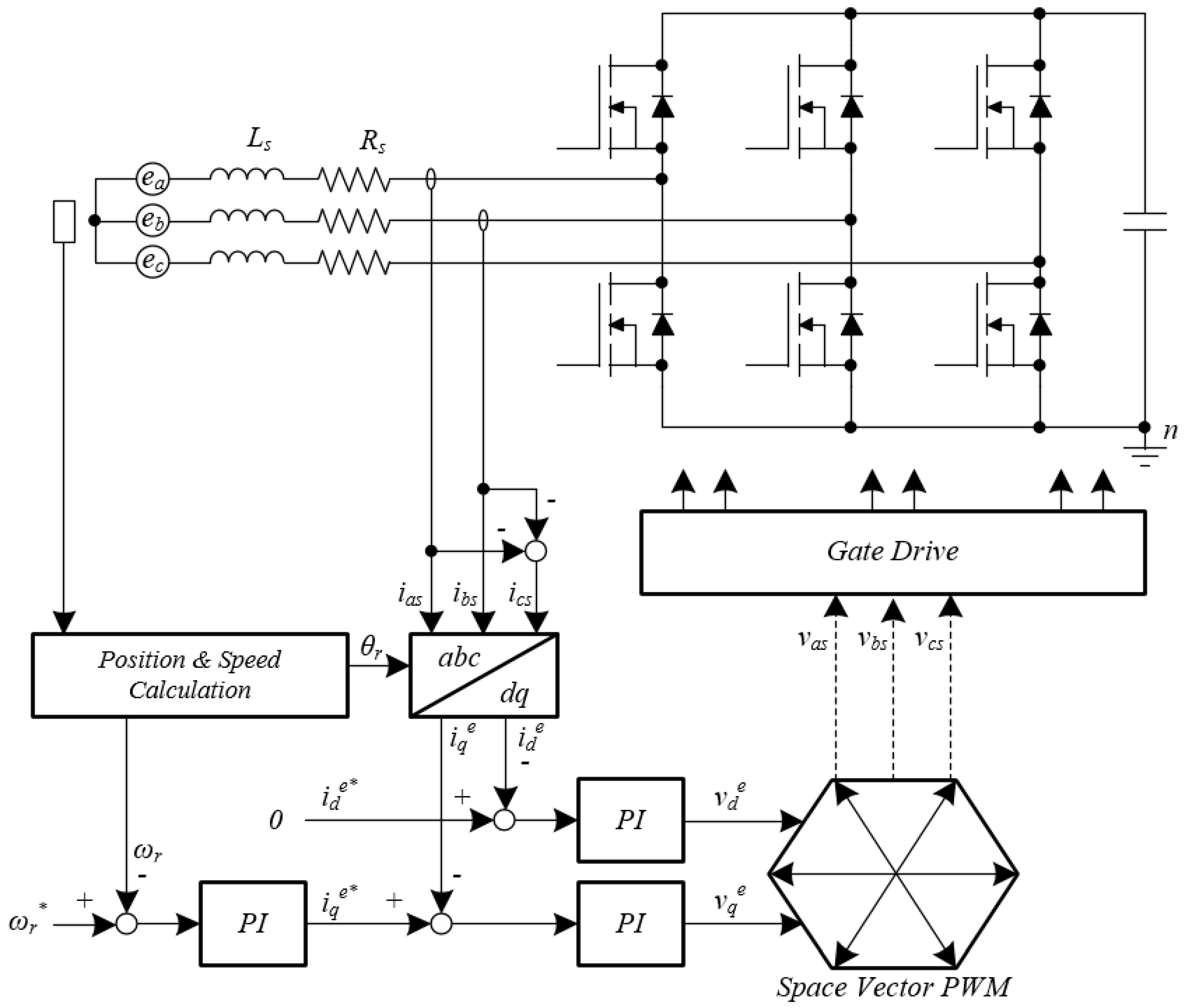
Figure 4 shows the conventional control configuration of SPMSMs for speed control. Because the torque of SPMSMs is generated by the
q-axis current, the
d-axis current command is set to zero, and the
q-axis current is used to construct the speed controller. Information about position and speed is measured by the position sensor. The
q-axis current command is determined by the speed controller, and the
d-,
q-axis current controllers generate the
d-,
q-axis voltage references. The pulse width modulation (PWM) duties are determined using the space vector PWM method, based on the voltage reference in the synchronous reference frame. Finally, PWM duties are applied to the power switch using the gate drive of the inverter.
3. Stator Winding Temperature Estimation Using d-Axis Current Injection
A temperature increase can cause several adverse effects [
18,
19]. For example, a temperature rise in the stator winding causes stator resistance variation and can degrade the stator winding insulation. The stator winding temperature can be detected through estimation of the stator resistance.
Under the steady-state condition, the voltage equation of PMSMs can be expressed as a variable depending on the temperature and current as
In Equation (4),
Rs and
ψm are functions of the stator and magnet temperatures, respectively.
Ld,q are the functions of the magnet temperature and the stator current. Equation (4) can be rewritten as Equation (5), because the
d-axis current becomes zero for the torque maximization of SPMSMs:
From Equation (5), the
q-axis inductance can be expressed as Equation (6).
The stator temperature can be estimated through the calculation of the stator resistance, as in Equation (7). However, as the rotor flux can vary with the rotor temperature, the stator winding temperature estimation may exhibit low accuracy. This may cause a large error in the temperature estimation of the stator winding. Therefore, an additional equation is required to obtain the stator winding temperature.
As mentioned in the previous section, the constant torque for the SPMSMs is maintained even if the
d-axis current is applied while the constant
q-axis current is generated. Under the constant torque operation, the motor speed is maintained, and Equation (4) can be expressed.
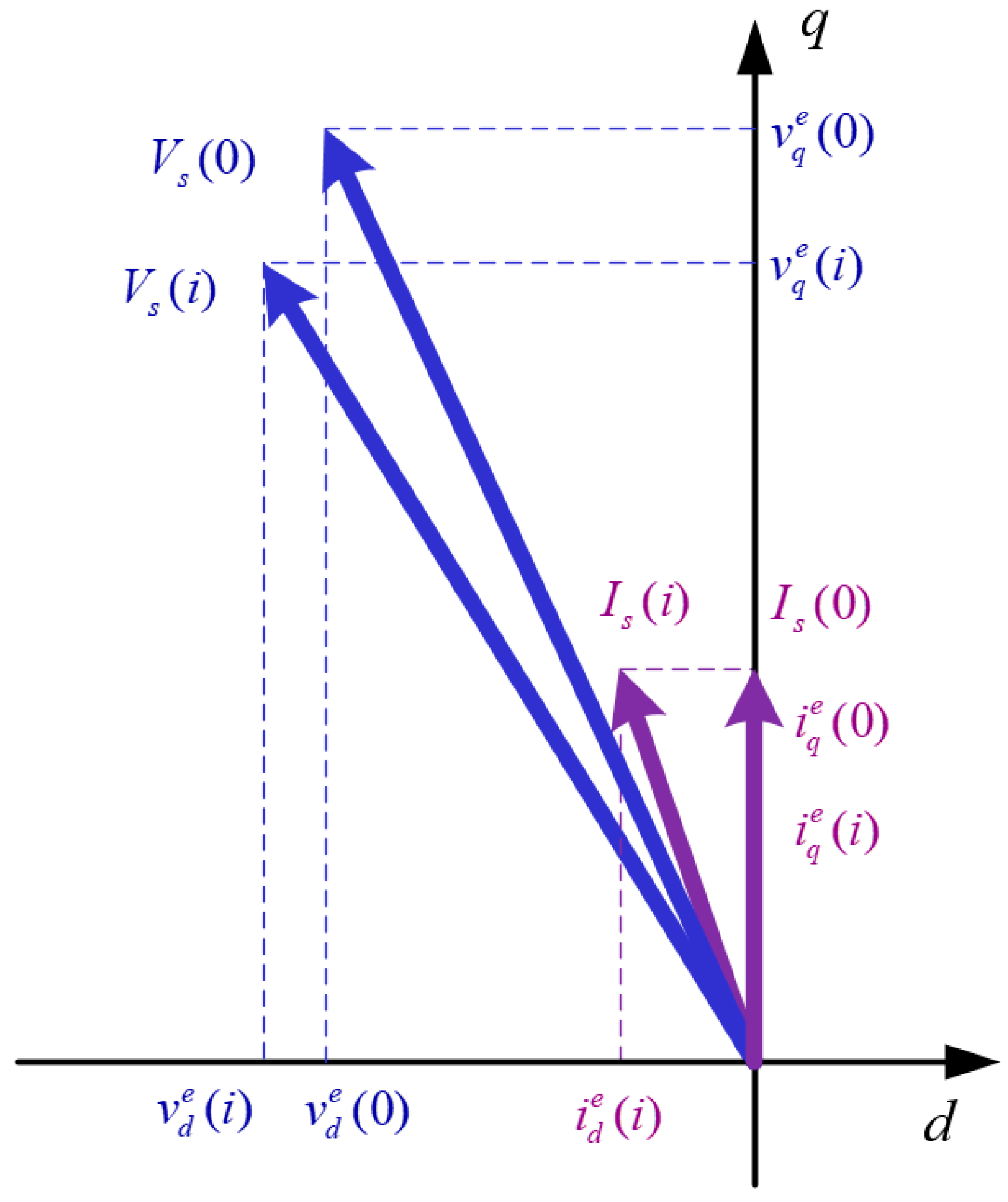
Figure 5 shows voltage and current vectors for temperature estimation. The
d-axis current injection can be performed while the
q-axis current is constant. When the
d-axis current
i is injected, the voltages and currents can be expressed as
ved(i),
veq(i), and
ied(i),
ieq(i), respectively. When
ied = 0, the voltage and the current can be expressed as
ved(0),
veq(0), and
ied(0),
ieq(0), respectively. The voltage equation for generating the same torque can be summarized as Equations (8) and (9).
Because the currents, motor speed, and voltage can be measured or calculated by the current sensor, position sensor, and current controller output, the
q-axis inductance can be calculated as Equation (10) from Equation (9). We can assume Equation (10) because the difference between the
d-axis inductance and the
q-axis inductance is sufficiently small.
Equation (10) can be substituted into Equation (8) and arranged as Equation (11). The phase resistance
Rs can be derived by using Equations (11) and (12).
Based on finite element analysis (FEA), the SPMSMs can be modeled and analyzed. The Rs map according to the stator winding temperature can be obtained from the FEA results. The stator winding temperature can be estimated by comparing the calculated Rs with the temperature map. Analysis is not required regarding the inductance and the rotor flux variation according to the current vectors and the magnet temperature using FEA, because the d-, q-axis inductances can be calculated as shown in Equation (10) and the rotor flux is not required to calculate the stator resistance.
Figure 6 shows the control block-diagram of the proposed stator winding temperature estimation method using the motor parameter estimation for the SPMSMs. As described above, two equations, depending on whether the
d-axis current is injected or not, are required for estimating the stator temperature. To detect the stator temperature, the output
d-,
q-axis currents, the applied
d-,
q-axis voltages, and the motor speed are stored when
ied = 0. Subsequently, the
d-axis current is applied in the same
q-axis current to measure the output
d-,
q-axis currents, the applied
d-,
q-axis voltages, and the motor speed. The
d-axis current should be applied considering the current limit. After the detection of variables for the temperature estimation, the
d-axis current is again applied at zero. The stator resistance is estimated using Equation (12). The stator winding temperature is estimated using the look-up table obtained from FEA. An averaging filter can be used in consideration of inverter noise during data acquisition. The estimation time is determined by the response performance of the current controller and filtering. The stator winding temperature estimation procedure does not need to be continuously operated, and the stator winding temperature can be estimated by applying the
d-axis current only when the stator winding temperature is required. A rectangular
d-axis current, can be used to estimate the stator winding temperature.
4. Simulation Results
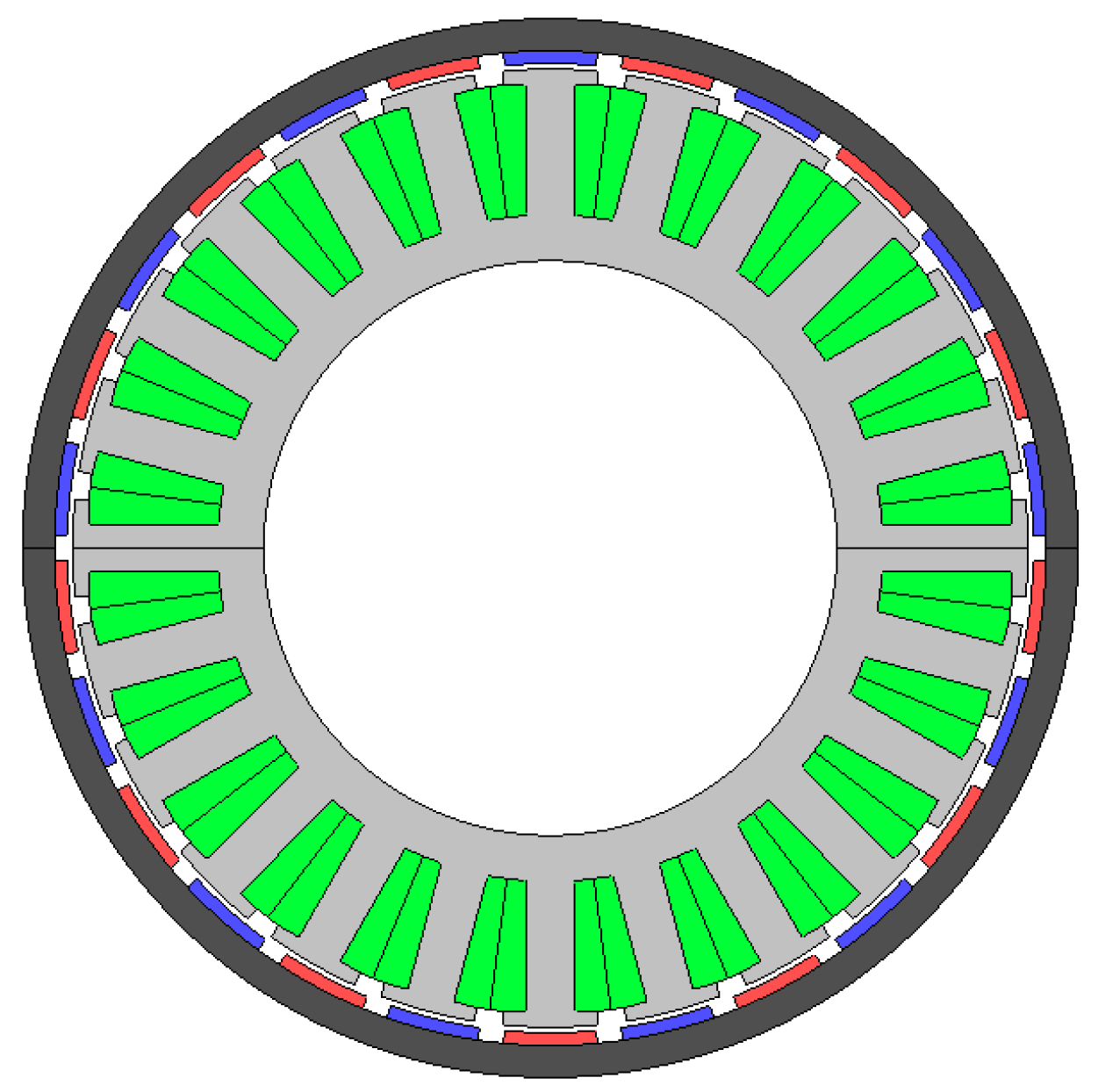
Finite element modeling (FEM) was used for the verification of motor parameter variation. The motor design used for the motor parameter variation simulation with temperature is shown in
Figure 7, and the motor parameters at 20 °C are shown in
Table 1.
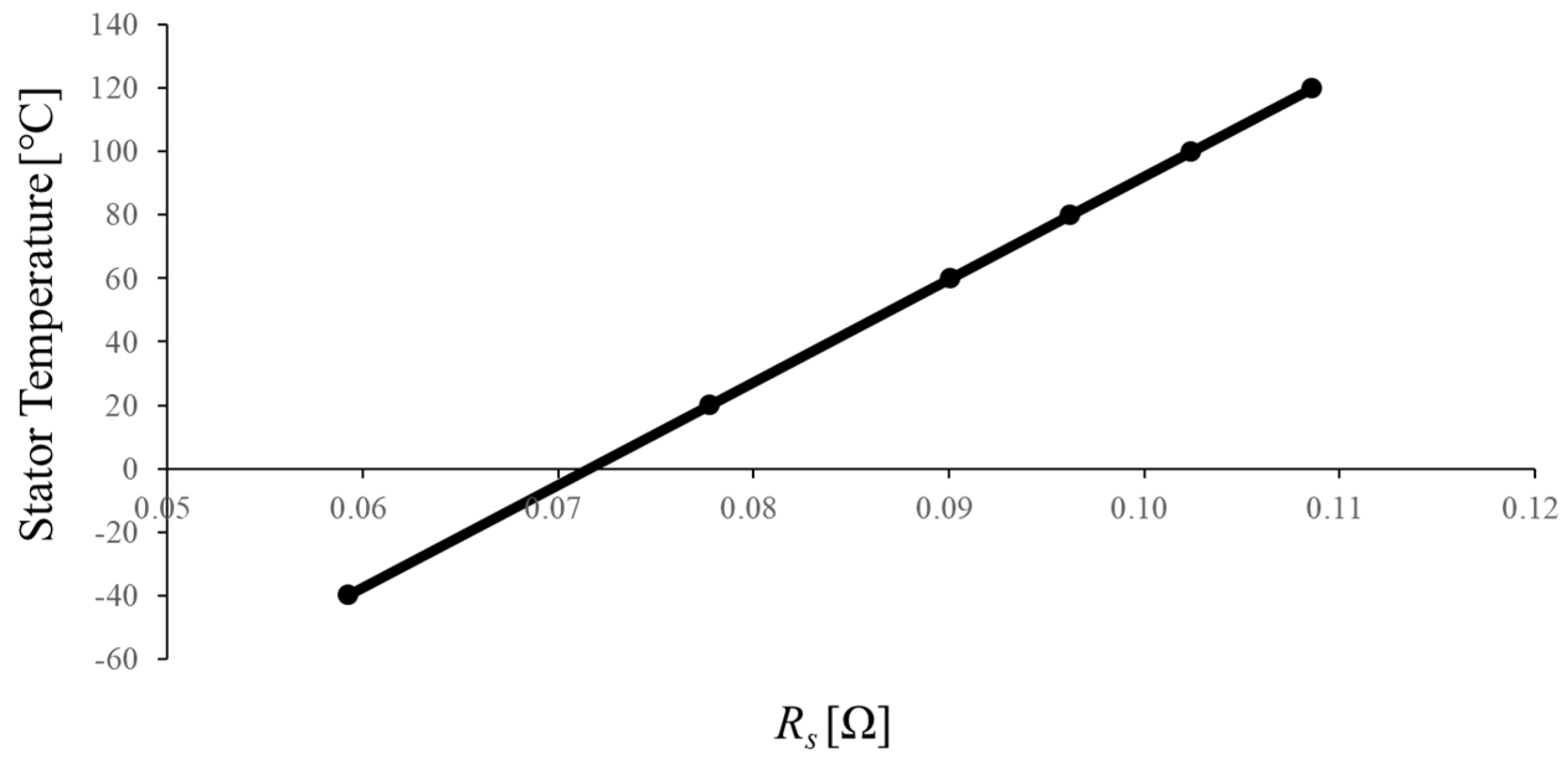
Figure 8 shows the stator resistance as a function of temperature. As the temperature increases, the stator resistance increases. The stator resistance can be calculated from Equation (12). The stator winding temperature can be estimated using the resistance table as shown in
Figure 8.
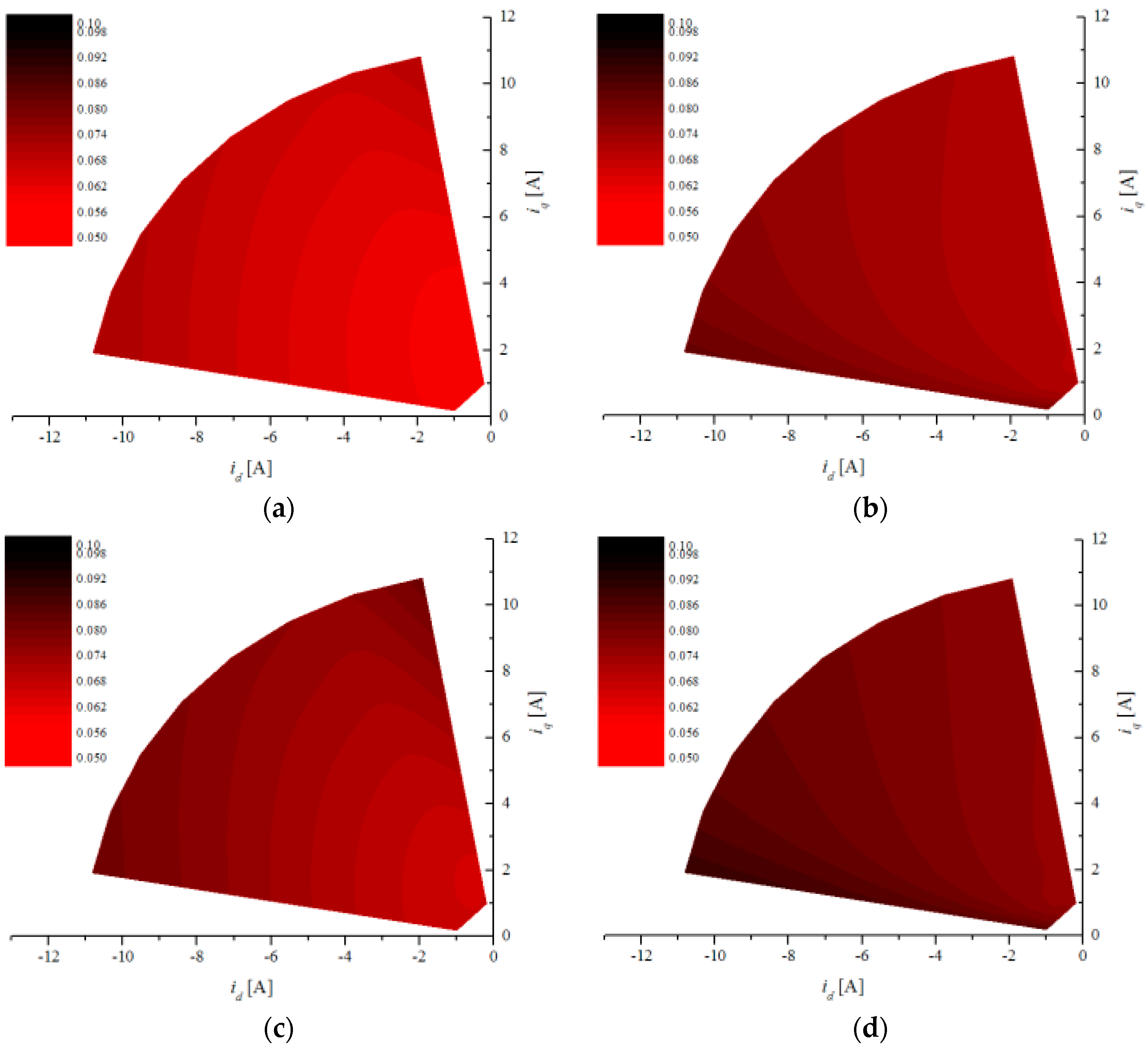
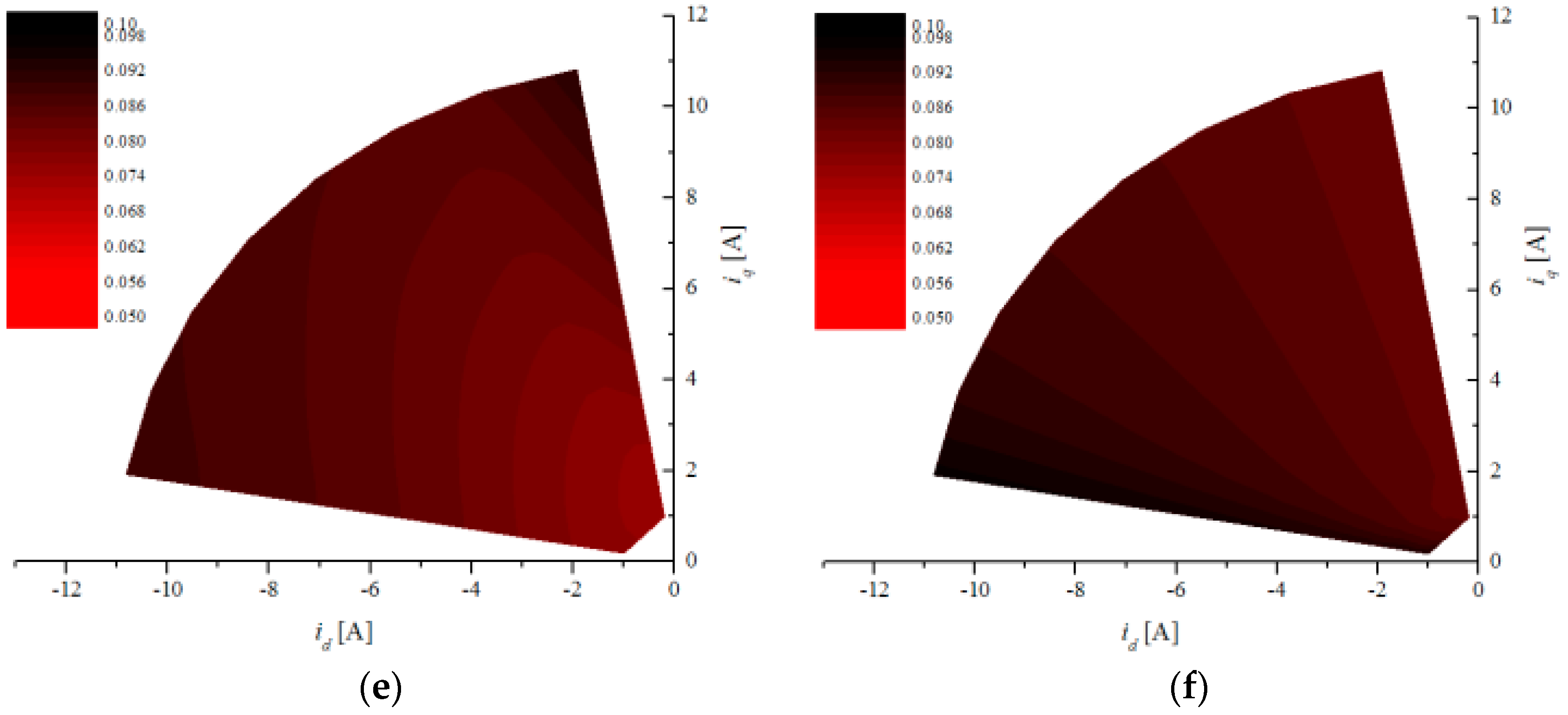
Figure 9 shows the
d- and
q-axis inductance maps according to
id and
iq at 20 °C. Unlike stator resistance, motor inductance varies with rotor temperature and current. Therefore, the inductance in the simulation should vary according to the temperature and the current. The inductance map was derived from the FEM analysis and applied to motor modeling.
The basic parameters of the SPMSM are listed in
Table 1. The motor parameters with nonlinear characteristics, as shown in
Figure 8 and
Figure 9, were applied using a look-up table. The proposed estimation method of motor parameter R
s was modeled and simulated in MATLAB Simulink. The motor model for the simulation is shown in
Figure 10. The stator resistance was determined by the stator resistance table according to the stator winding temperature. The inductances were determined by the inductance a three-dimensional table according to current and rotor temperature.
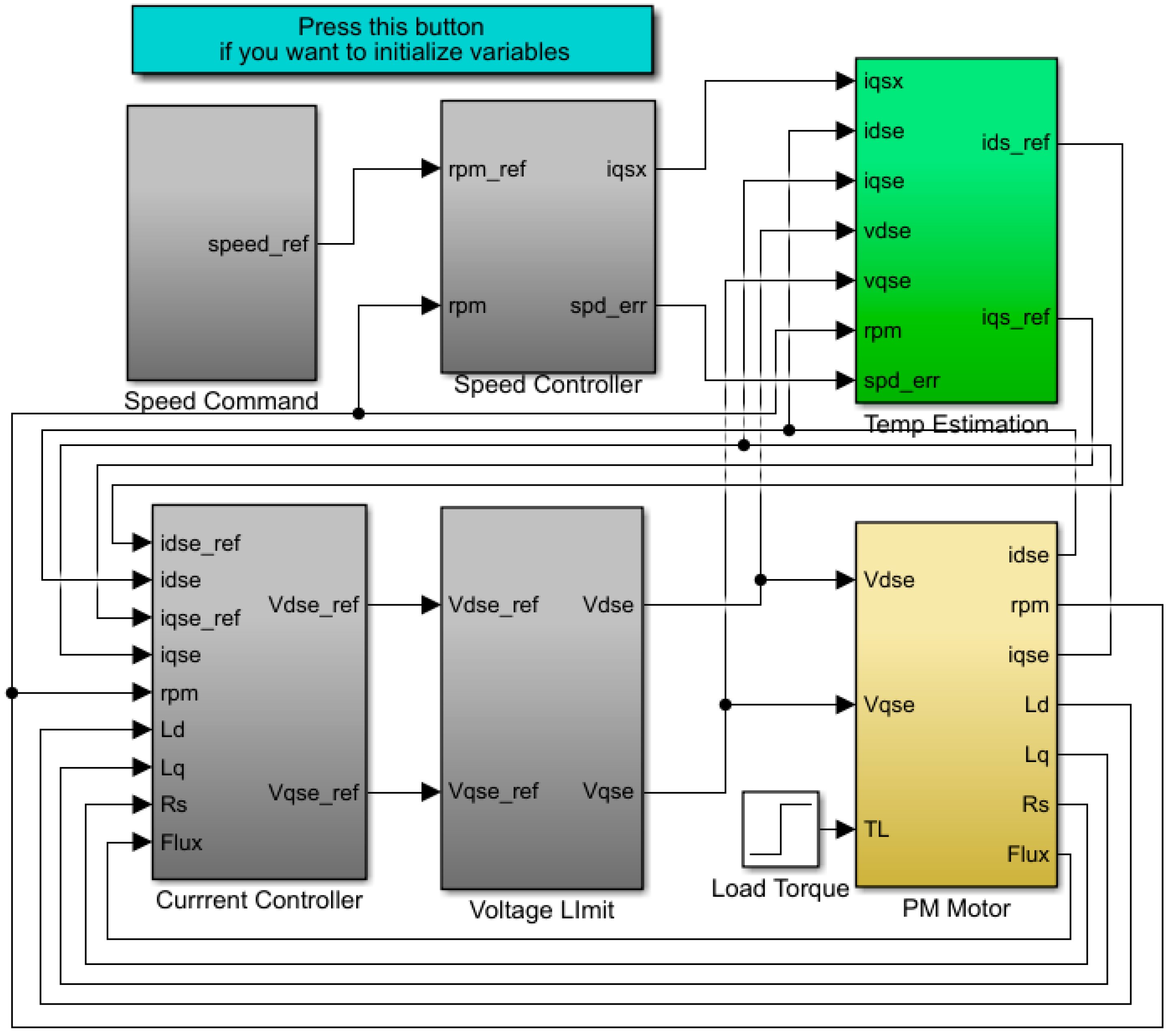
The SPMSM controller and the motor model were configured as shown in
Figure 11, based on the speed controller. To verify the proposed method, the simulation for the temperature estimation method was performed at 1000 rpm and 0.2 Nm. The rotor and the stator temperatures were assumed to be 20 °C and 60 °C, respectively.
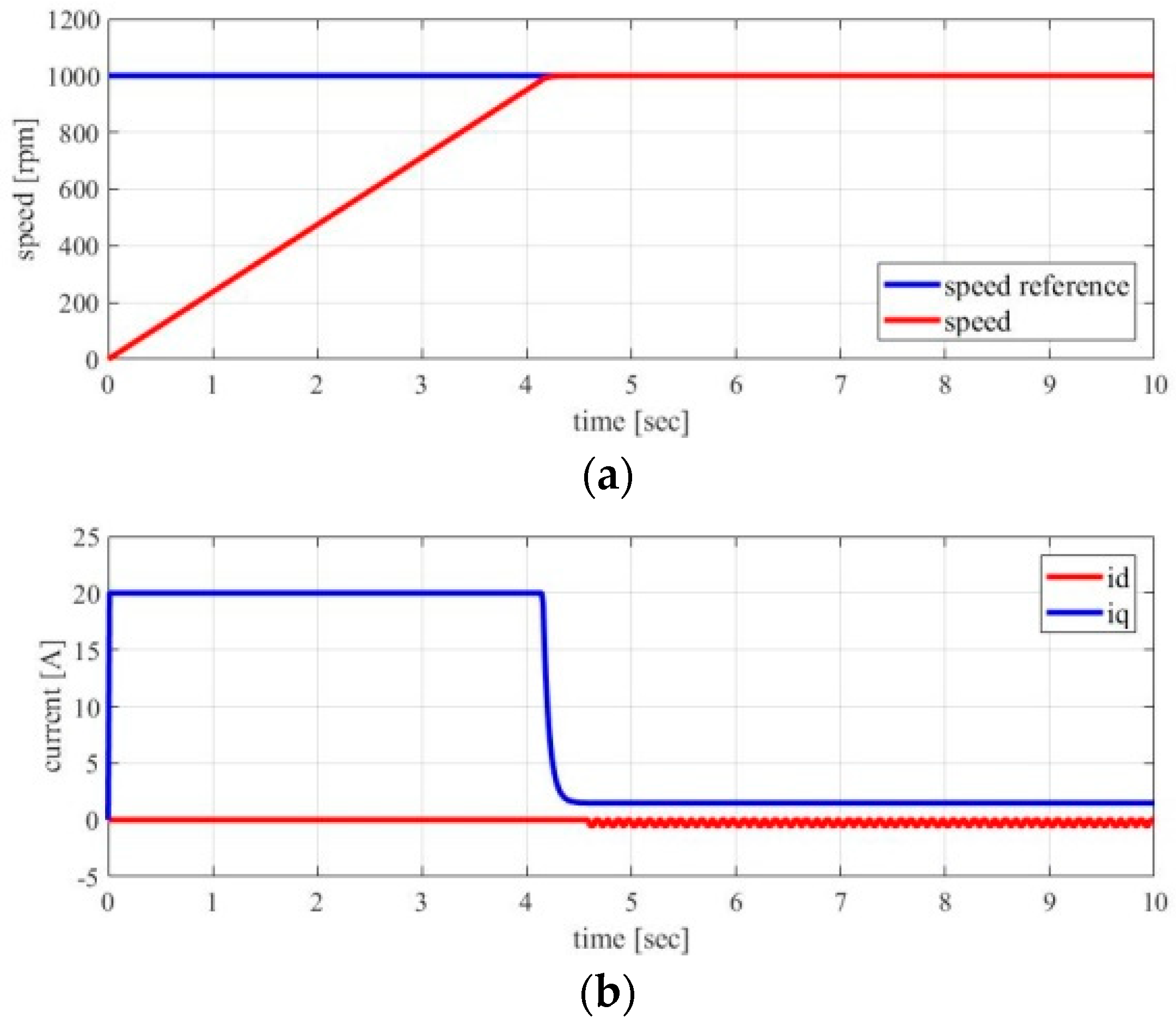
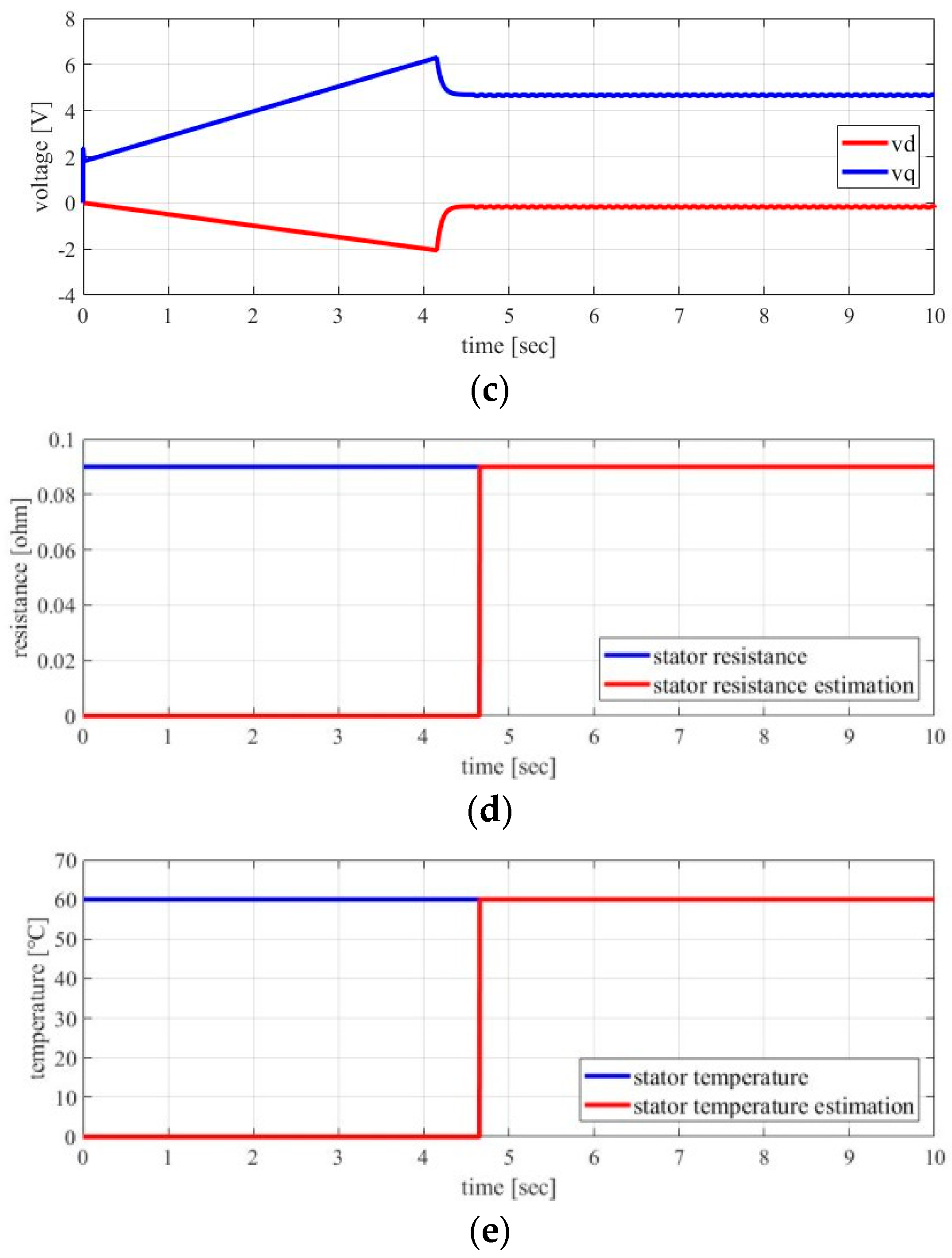
Figure 12 shows the simulation results for the stator winding temperature estimation. In the steady-state, where the target speed is reached, the motor parameter estimation method, through the
d-axis current injection, is operating. The stator winding temperature was estimated through the motor parameter estimation. As shown in
Figure 12, the stator winding temperature was estimated almost exactly.
5. Experimental Results
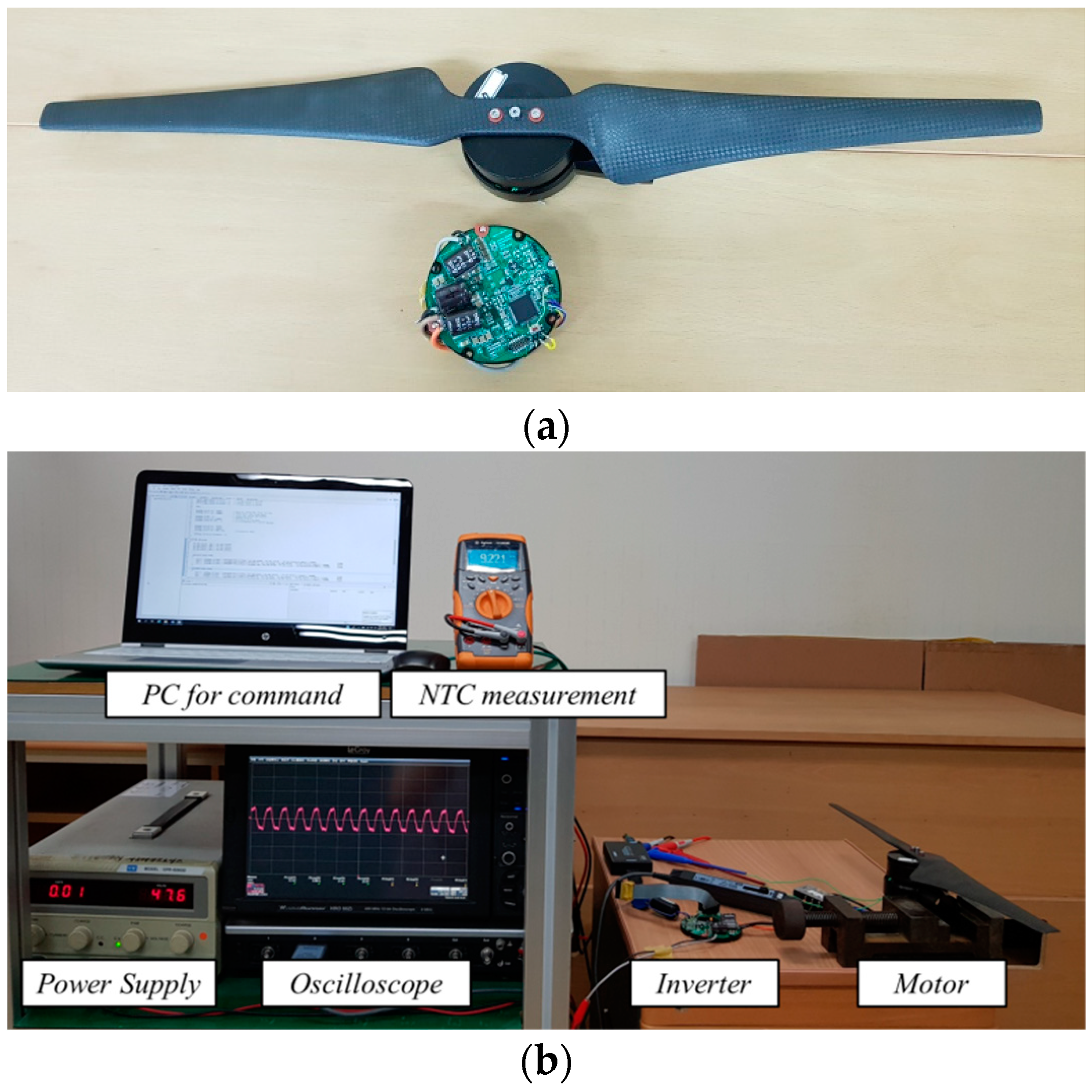
Figure 13 shows an experimental setup for validating the stator winding temperature estimation method, consisting of a prototype SPMSM and an inverter. The test motor is the outer-rotor-type for a drone, and the specifications are shown in
Table 1. A 20 kHz PWM frequency was applied to the inverter, and the stator winding estimator was operated synchronously with the PWM frequency. For comparison with the estimation value, the negative temperature coefficient (NTC) thermistor 103NT-4-R025H34G temperature sensor was attached inside the stator winding. A characteristic of the NTC thermistor is that the resistance decreases when the temperature increases. The stator winding temperature was obtained from the NTC thermistor, and the accuracy of the estimated stator winding temperature was evaluated. For the competitive experiment, the test was carried out with the actual load fan. The stator winding temperature estimation was compared until temperature saturation at 1000 rpm, where the drone fan motor was mainly operated.
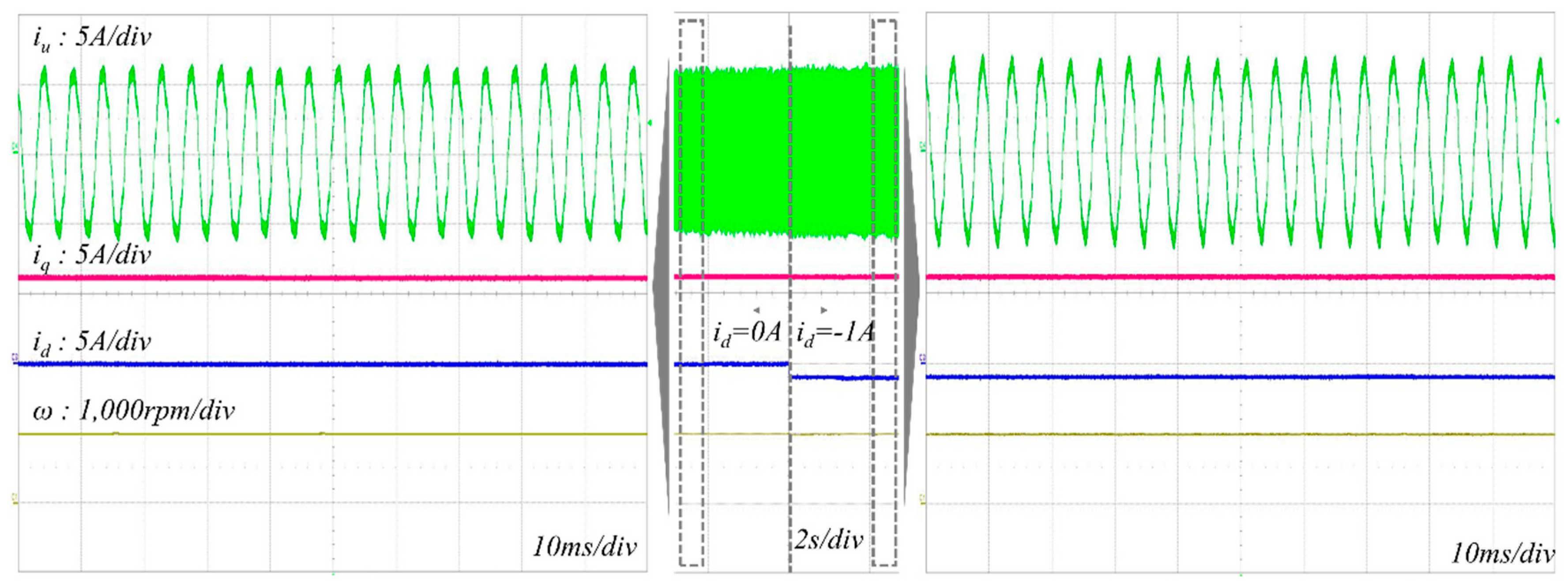
Figure 14 shows the phase current,
q-axis current, and
d-axis current waveforms for when the
d-axis current was or was not injected at 1000 rpm. For estimating the stator winding temperature, a
d-axis current of −1 A was injected. The magnitude of the phase current was slightly increased due to the
d-axis current injection.
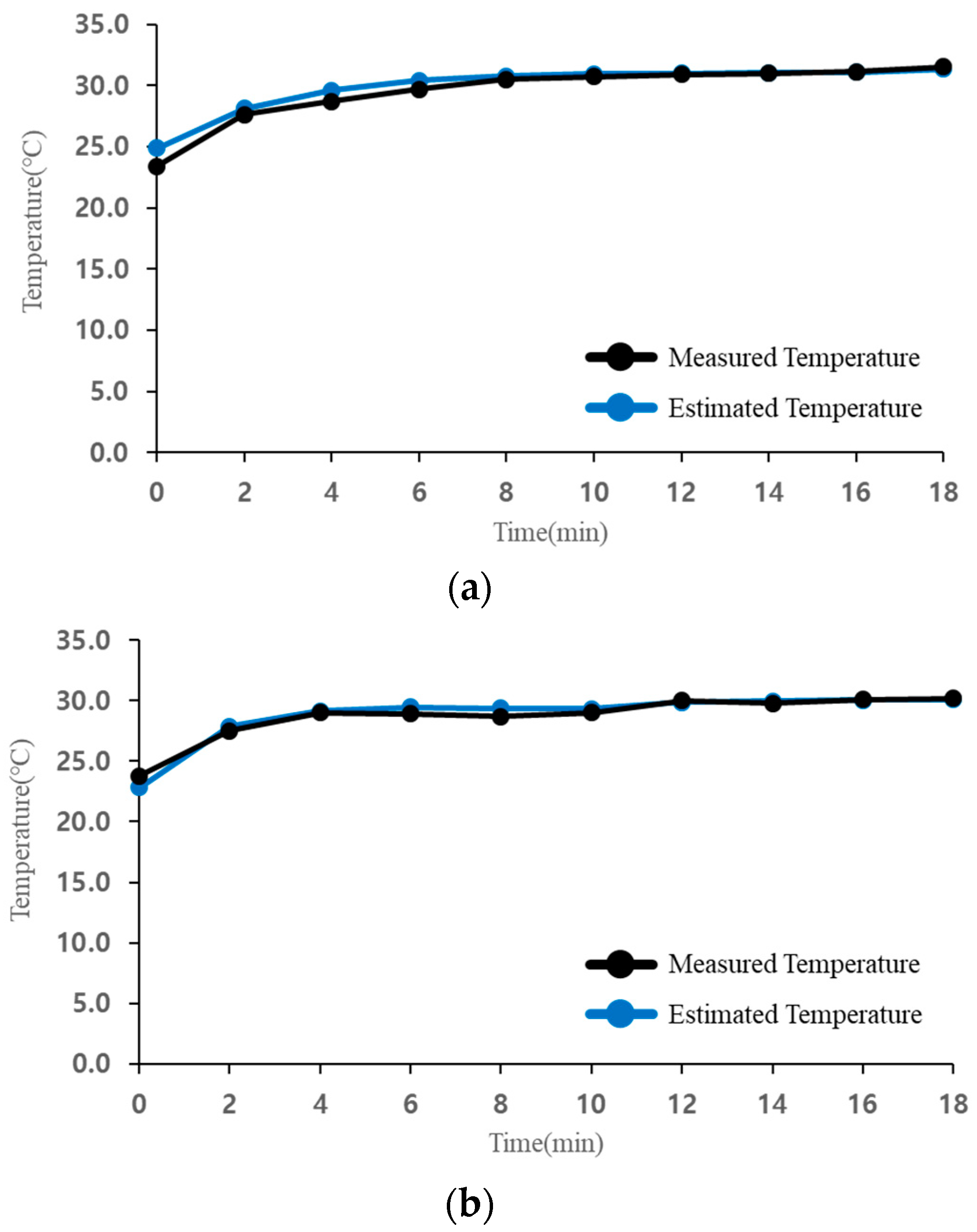
Figure 15 shows the stator winding temperature estimation results for no load and fluid load. At no load, stator temperature saturation occurred after approximately 8 min of motor operation, and the temperature increased to 32 °C. However, the stator temperature saturation occurred after approximately 2 min of motor operation at the fluid load, and the temperature increased to 30 °C. In the fluid load, the fan affects the temperature of the motor, and the stator temperature saturated at lower temperatures than at no load. The maximum error of temperature estimation was measured at approximately 2 °C. The stator winding temperature estimation was verified for both no load and fluid load.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}