DC/DC Boost Converter–Inverter as Driver for a DC Motor: Modeling and Experimental Verification

 , , , and
, , , and
Abstract
:
1. Introduction
2. “DC/DC Boost Converter–Inverter–DC Motor” System
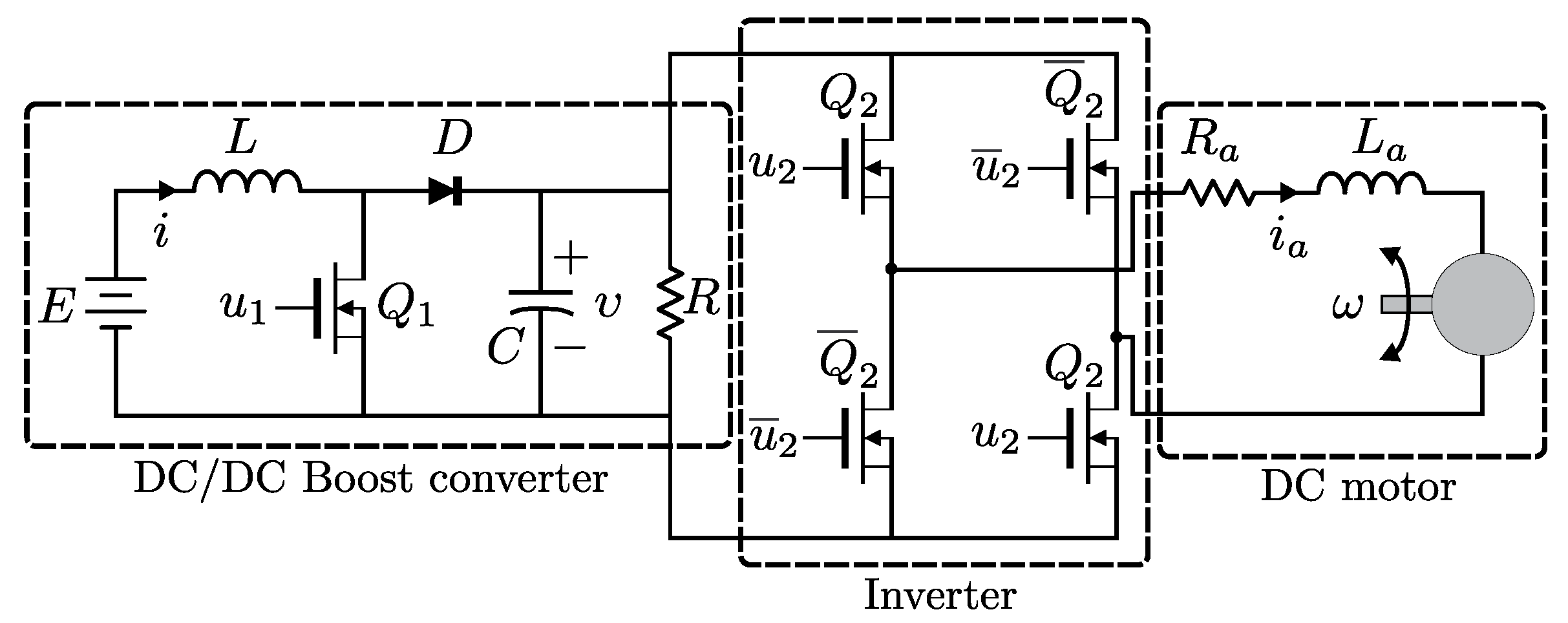
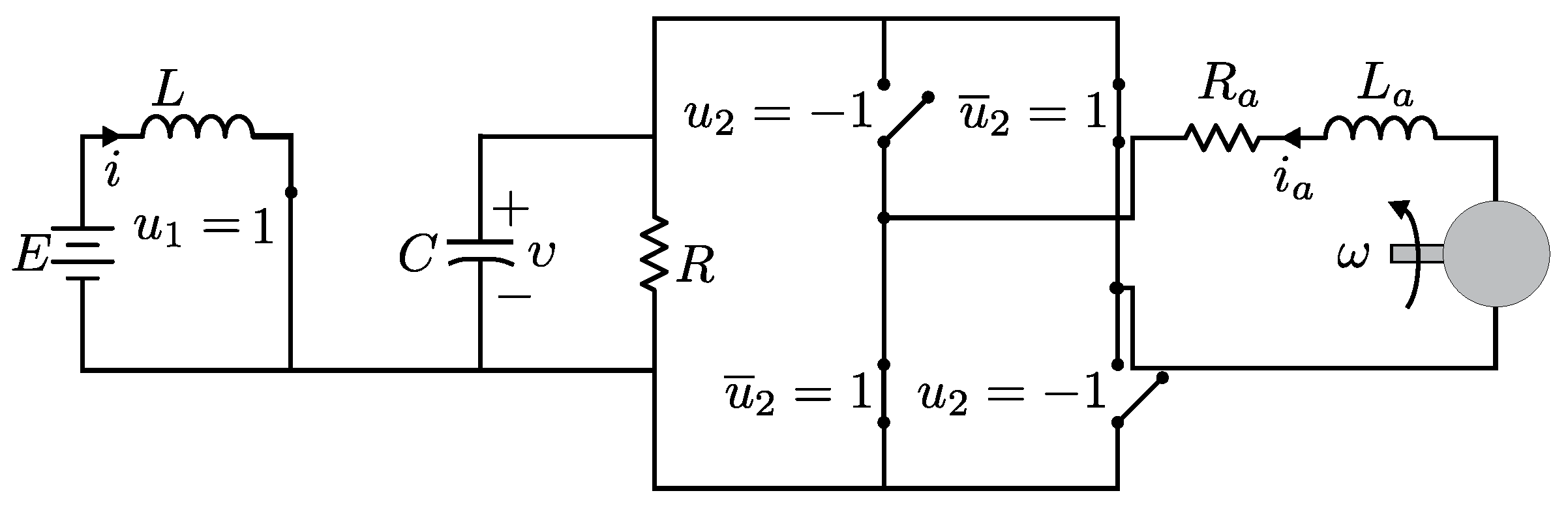
2.1. Mathematical Model of the System
- DC/DC boost converter. This is composed of a power supply E, a switching input that turns on/off transistor , a current i that flows through the inductor L, and a diode D. The output voltage, associated with capacitor C and load R, is denoted by .
- Inverter. Here, and are the inputs that turn on/off transistors and , respectively, thus achieving the bidirectional rotation of the motor shaft.
- DC motor. Parameters , , and are the armature current, armature resistance, and armature inductance; denotes the angular velocity of the motor shaft. Additional parameters for the DC motor are J, , , and b, which correspond to the moment of inertia of the rotor and load, the counter-electromotive force constant, the torque constant, and the viscous friction coefficient, respectively.
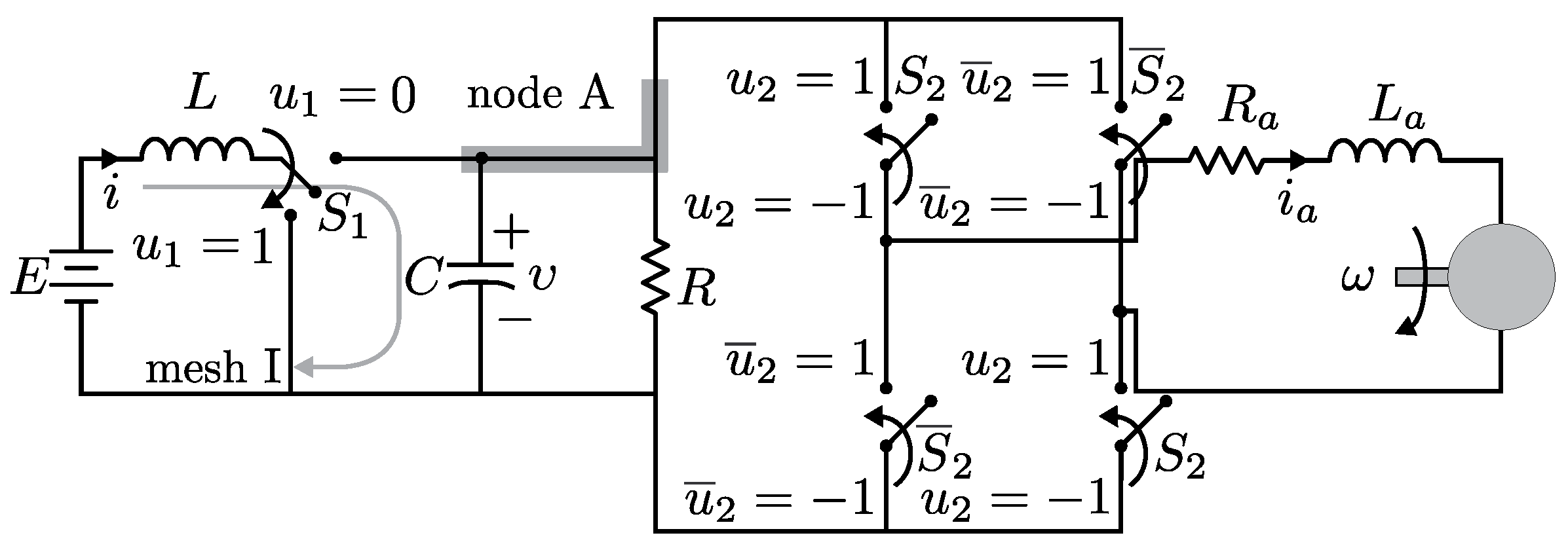
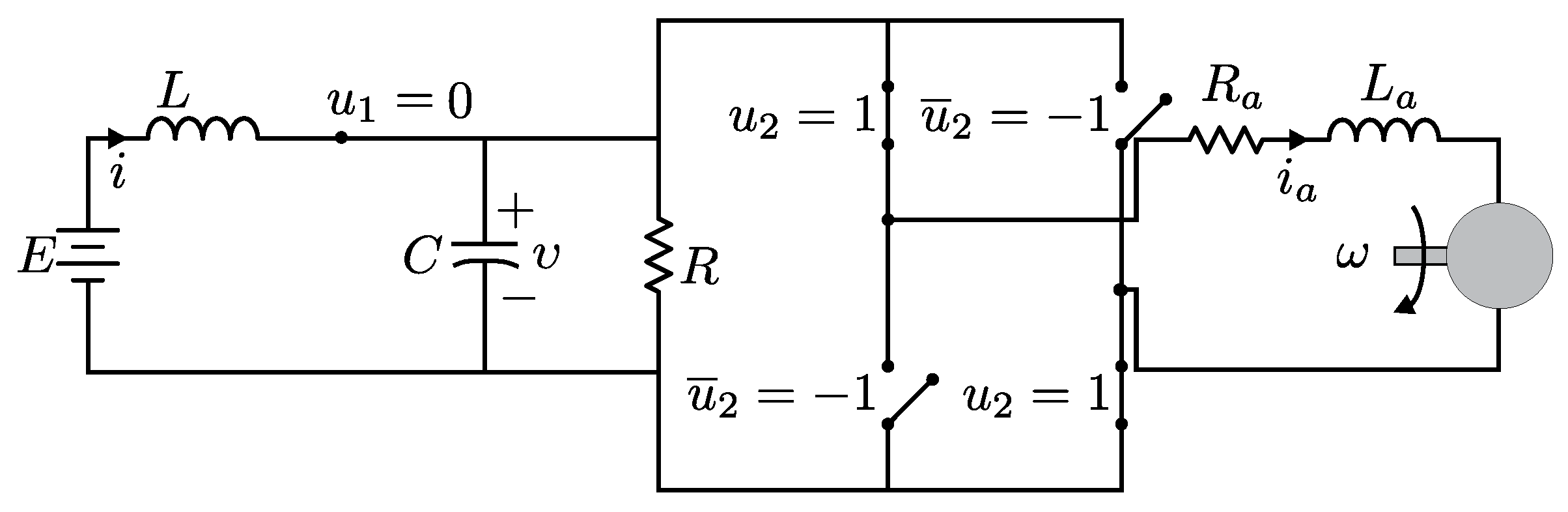
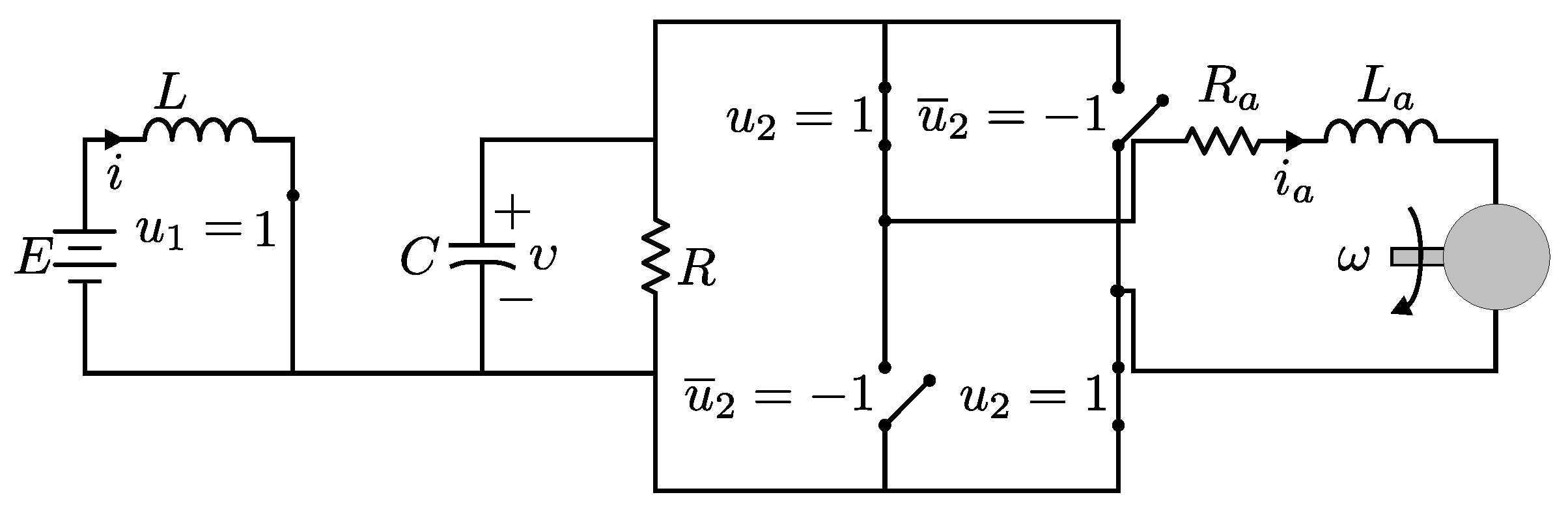
2.1.1. Operation Mode 1
2.1.2. Operation Mode 2
2.1.3. Operation Mode 3
2.1.4. Operation Mode 4
2.2. Generation of Reference Trajectories
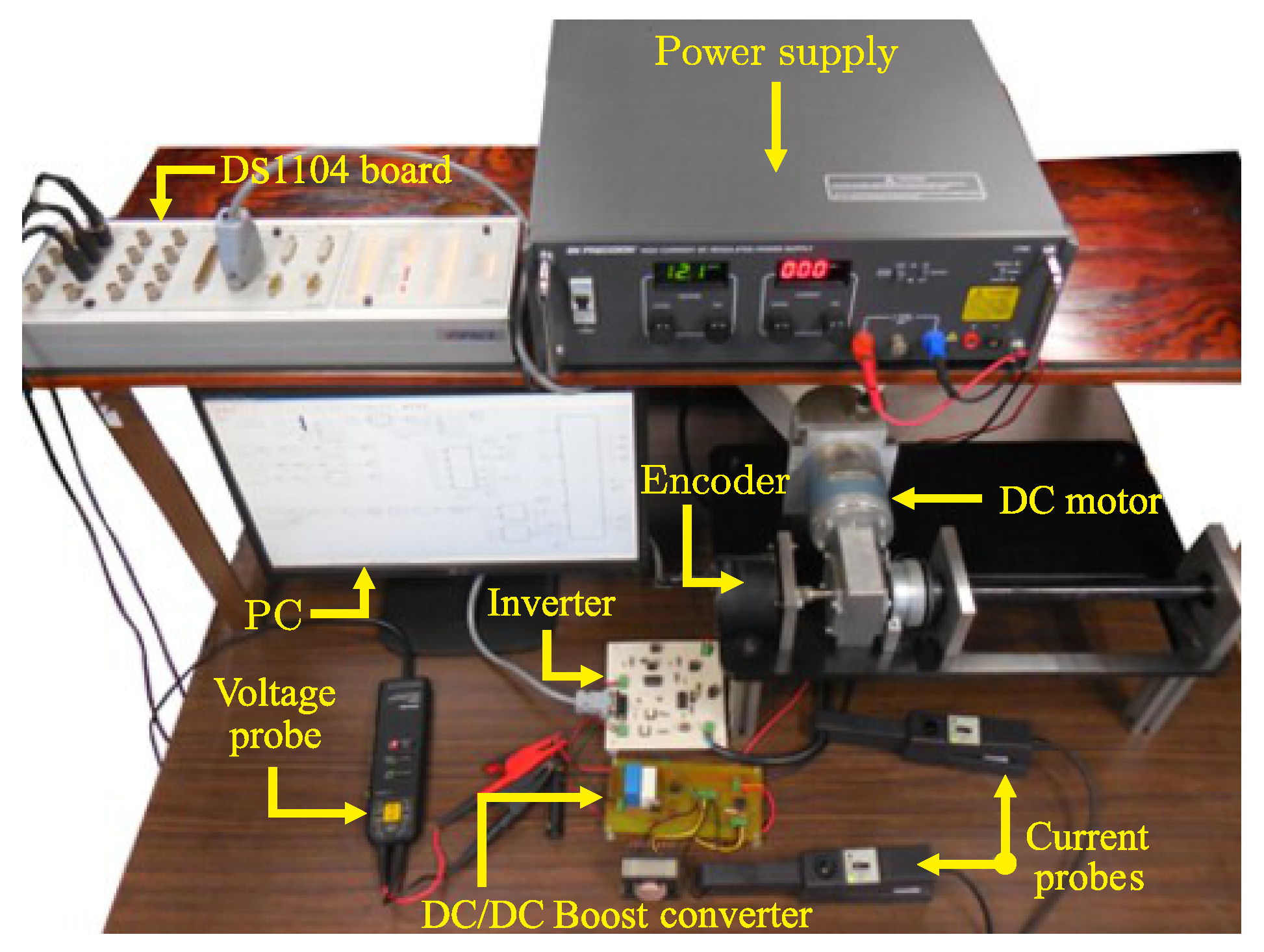
3. Built Experimental Prototype
- DC/DC boost converter–inverter–DC motor system. The following three subsystems are distinguished within this block: boost converter, inverter, and DC motor. In this direction, the nominal values associated with the converter parameters areThe inverter is composed of four IRF840 MOSFET transistors driven by two IR2113 IC’s. The DC motor is an ENGEL GNM5440E-G3.1, whose nominal parameters areSimilarly, variables i, , , and are measured via two A622 Tektronix current probes, a P5200A Tektronix voltage probe, and an E6B2-CWZ6C incremental encoder, respectively.
- Signal conditioning and DSP. Here, the DS1104 board is electrically isolated from the power stage through the NTE3087 and TLP250 optoisolators. Additionally, this block drives the boost converter and the inverter properly by generating the switched signals and via PWM.
- Generation of trajectories. The reference trajectories , , , , and and the desired trajectories and are programmed in this block.
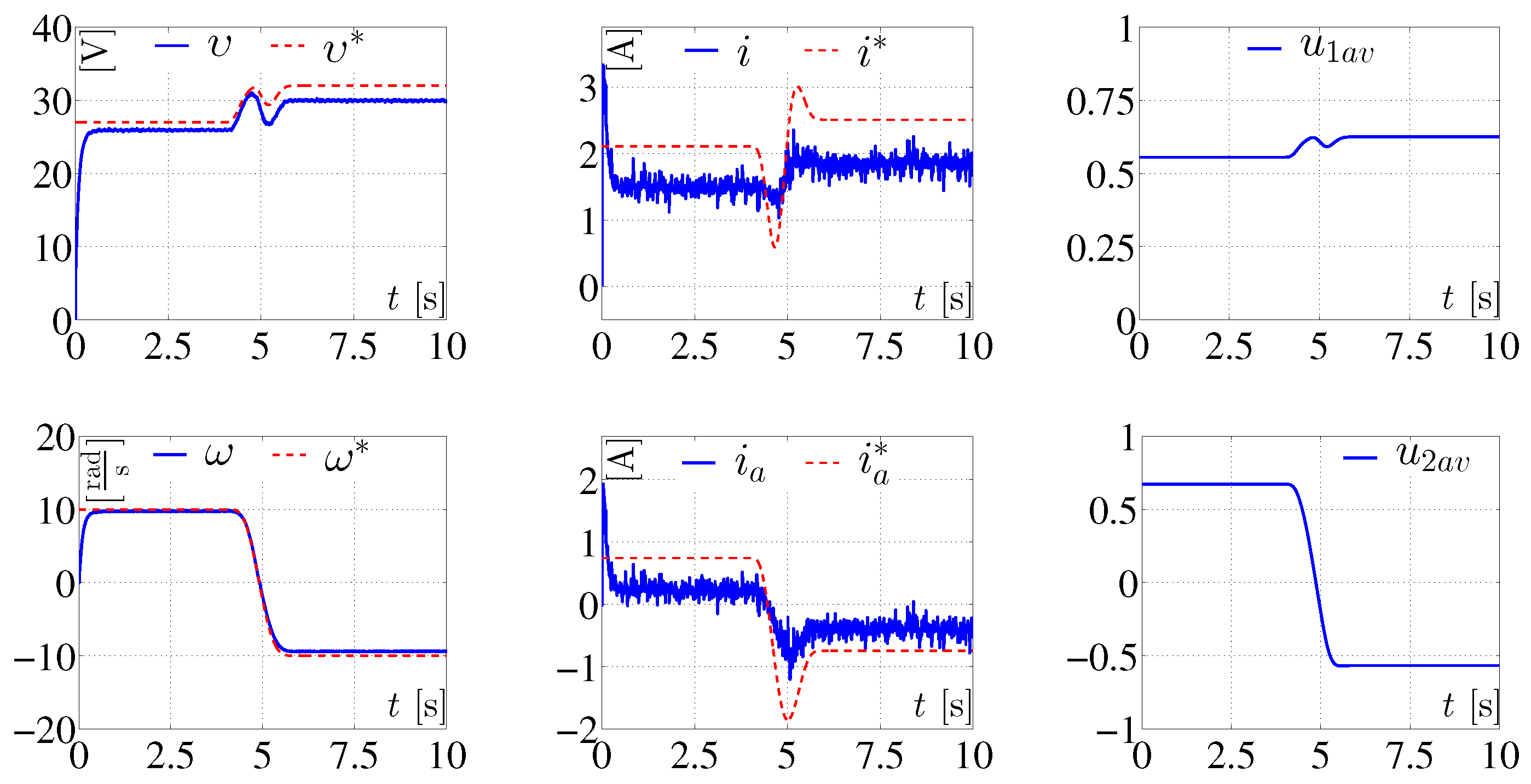
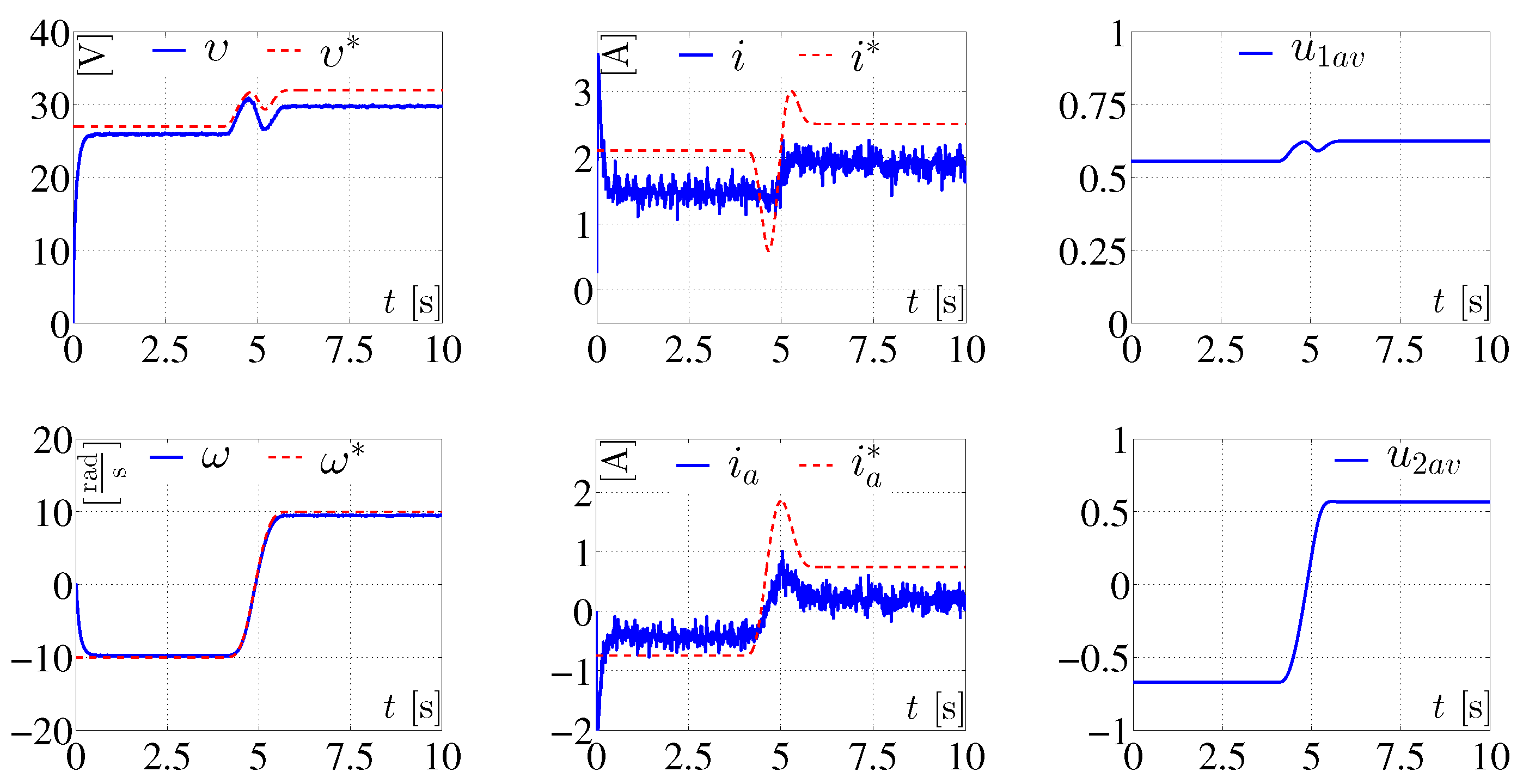
4. Experimental Results
4.1. Experiments Performed
4.1.1. Experiment 1
4.1.2. Experiment 2
4.1.3. Experiment 3
4.1.4. Experiment 4
4.1.5. Experiment 5
4.2. Comments on the Experimental Results
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- García-Sánchez, J.R.; Silva-Ortigoza, R.; Tavera-Mosqueda, S.; Márquez-Sánchez, C.; Hernández-Guzmán, V.M.; Antonio-Cruz, M.; Silva-Ortigoza, G.; Taud, H. Tracking control for mobile robots considering the dynamics of all their subsystems: Experimental implementation. Complexity 2017, 2017, 1–18. [Google Scholar] [CrossRef]
- García-Sánchez, J.R.; Tavera-Mosqueda, S.; Silva-Ortigoza, R.; Antonio-Cruz, M.; Silva-Ortigoza, G.; Rubio, J. Assessment of an avarage tracking controller that considers all the subsystems involved in a WMR: Implementation via PWM or sigma-delta modulation. IEEE Latin Am. Trans. 2016, 14, 1093–1102. [Google Scholar] [CrossRef]
- Silva-Ortigoza, R.; García-Sánchez, J.R.; Hernández-Guzmán, V.M.; Márquez-Sánchez, C.; Marcelino-Aranda, M. Trajectory tracking control for a differential drive wheeled mobile robot considering the dynamics related to the actuators and power stage. IEEE Latin Am. Trans. 2016, 14, 657–664. [Google Scholar] [CrossRef]
- Guzmán, E.; García, I.; Guerrero, E.; Pacheco, C. A tool for supporting the design of DC-DC converters through FPGA-based experiments. IEEE Latin Am. Trans. 2016, 14, 289–296. [Google Scholar] [CrossRef]
- Cosp, J.; Martínez, H. Design of an on-chip hybrid DC/DC converter. IEEE Latin Am. Trans. 2015, 13, 2101–2105. [Google Scholar] [CrossRef]
- Ortega, M.; Jurado, F.; Vera, D. Novel topology for DC-DC full-bridge unidirectional converter for renewable energies. IEEE Latin Am. Trans. 2014, 12, 1381–1388. [Google Scholar] [CrossRef]
- Antritter, F.; Maurer, P.; Reger, J. Flatness based control of a Buck-converter driven DC motor. In Proceedings of the 4th Symposium on Mechatronic Systems, IFAC 2006, Heidelberg, Germany, 12–14 September 2006; pp. 36–41. [Google Scholar]
- Lyshevski, S.E. Electromechanical Systems, Electric Machines, and Applied Mechatronics; CRC Press: Boca Raton, FL, USA, 2000; ISBN 0-8493-2275-8. [Google Scholar]
- Linares-Flores, J.; Reger, J.; Sira-Ramírez, H. Load torque estimation and passivity-based control of a Boost-converter/DC-motor combination. IEEE Trans. Control Syst. Technol. 2010, 18, 1398–1405. [Google Scholar] [CrossRef]
- Alexandridis, A.T.; Konstantopoulos, G.C. Modified PI speed controllers for series-excited DC motors fed by DC/DC Boost converters. Control Eng. Pract. 2014, 23, 14–21. [Google Scholar] [CrossRef]
- Konstantopoulos, G.C.; Alexandridis, A.T. Enhanced control design of simple DC-DC Boost converter-driven DC motors: Analysis and implementation. Electr. Power Compon. Syst. 2015, 43, 1946–1957. [Google Scholar] [CrossRef]
- Silva-Ortigoza, R.; García-Sánchez, J.R.; Alba-Martínez, J.M.; Hernández-Guzmán, V.M.; Marcelino-Aranda, M.; Taud, H.; Bautista-Quintero, R. Two-stage control design of a Buck converter/DC motor system without velocity measurements via a Σ-Δ-modulator. Math. Probl. Eng. 2013, 2013, 1–11. [Google Scholar] [CrossRef]
- Sira-Ramírez, H.; Oliver-Salazar, M.A. On the robust control of Buck-converter DC-motor combinations. IEEE Trans. Power Electron. 2013, 28, 3912–3922. [Google Scholar] [CrossRef]
- Silva-Ortigoza, R.; Márquez-Sánchez, C.; Carrizosa-Corral, F.; Antonio-Cruz, M.; Alba-Martínez, J.M.; Saldaña-González, G. Hierarchical velocity control based on differential flatness for a DC/DC Buck converter-DC motor system. Math. Probl. Eng. 2014, 2014, 1–12. [Google Scholar] [CrossRef]
- Silva-Ortigoza, R.; Hernández-Guzmán, V.M.; Antonio-Cruz, M.; Muñoz-Carrillo, D. DC/DC Buck power converter as a smooth starter for a DC motor based on a hierarchical control. IEEE Trans. Power Electron. 2015, 30, 1076–1084. [Google Scholar] [CrossRef]
- Hernández-Guzmán, V.M.; Silva-Ortigoza, R.; Muñoz-Carrillo, D. Velocity control of a brushed DC–motor driven by a DC to DC Buck power converter. Int. J. Innov. Comp. Inf. Control 2015, 11, 509–521. Available online: http://www.ijicic.org/ijicic-14-04031.pdf (accessed on 10 June 2018).
- Kumar, S.G.; Thilagar, S.H. Sensorless load torque estimation and passivity based control of Buck converter fed DC motor. Sci. World J. 2015, 2015, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Khubalkar, S.; Chopade, A.; Junghare, A.; Aware, M.; Das, S. Design and realization of stand-alone digital fractional order PID controller for Buck converter fed DC motor. Circuits Syst. Signal Process. 2016, 35, 2189–2211. [Google Scholar] [CrossRef]
- Rigatos, G.; Siano, P.; Wira, P.; Sayed-Mouchaweh, M. Control of DC-DC converter and DC motor dynamics using differential flatness theory. Intell. Ind. Syst. 2016, 2, 371–380. [Google Scholar] [CrossRef]
- Nizami, T.K.; Chakravarty, A.; Mahanta, C. Design and implementation of a neuro-adaptive backstepping controller for Buck converter fed PMDC-motor. Control Eng. Pract. 2017, 58, 78–87. [Google Scholar] [CrossRef]
- Chakravarty, A.; Nizami, T.K.; Mahanta, C. Real time implementation of an adaptive backstepping control of Buck converter PMDC-motor combinations. In Proceedings of the Indian Control Conference, Guwahati, India, 4–6 January 2017; pp. 277–282. [Google Scholar]
- Roy, T.K.; Paul, L.C.; Sarkar, M.I.; Pervej, M.F.; Tumpa, F.K. Adaptive controller design for speed control of DC motors driven by a DC-DC Buck converter. In Proceedings of the International Conference on Electrical, Computer and Communication Engineering, Cox’s Bazar, Bangladesh, 16–18 February 2017; pp. 100–105. [Google Scholar]
- Ahmad, M.A.; Raja-Ismail, R.M.T. A data-driven sigmoid-based PI controller for Buck-converter powered DC motor. In Proceedings of the IEEE Symposium on Computer Applications and Industrial Electronics, Langkawi Island, Malaysia, 24–25 April 2017; pp. 81–86. [Google Scholar]
- Nizami, T.K.; Chakravarty, A.; Mahanta, C. A fast learning neuro adaptive control of Buck converter driven PMDC-motor: Design, analysis and validation. In Proceedings of the 20th IFAC World Congress, Toulouse, France, 9–14 July 2017; pp. 37–42. [Google Scholar]
- Wu, H.; Zhang, L.; Yang, J.; Li, S. Model predictive control for DC-DC Buck power converter-DC motor system with uncertainties using GPI observer. In Proceedings of the 36th Chinese Control Conference, Dalian, China, 26–28 July 2017; pp. 4906–4911. [Google Scholar]
- Sönmez, Y.; Dursun, M.; Güvenç, U.; Yilmaz, C. Start up current control of Buck-Boost convertor-fed serial DC motor. Pamukkale Univ. J. Eng. Sci. 2009, 15, 278–283. Available online: https://www.journalagent.com/pajes/pdfs/PAJES_15_2_278_283.pdf (accessed on 10 June 2018).
- Linares-Flores, J.; Barahona-Avalos, J.L.; Sira-Ramírez, H.; Contreras-Ordaz, M.A. Robust passivity-based control of a Buck-Boost-converter/DC–motor system: An active disturbance rejection approach. IEEE Trans. Ind. Appl. 2012, 48, 2362–2371. [Google Scholar] [CrossRef]
- Jiménez-Toribio, E.E.; Labour-Castro, A.A.; Muñiz-Rodríguez, F.; Pérez-Hernández, H.R.; Ortiz-Rivera, E.I. Sensorless control of Sepic and Ćuk converters for DC motors using solar panels. In Proceedings of the IEEE International Electric Machines and Drives Conference (IEMDC 2009), Miami, FL, USA, 3–6 May 2009; pp. 1503–1510. [Google Scholar]
- Silva-Ortigoza, R.; Alba-Juárez, J.N.; García-Sánchez, J.R.; Antonio-Cruz, M.; Hernández-Guzmán, V.M.; Taud, H. Modeling and Experimental Validation of a Bidirectional DC/DC Buck Power Electronic Converter-DC Motor System. IEEE Latin Am. Trans. 2017, 15, 1043–1051. [Google Scholar] [CrossRef]
- Silva-Ortigoza, R.; Alba-Juárez, J.N.; García-Sánchez, J.R.; Hernández-Guzmán, V.M.; Sosa-Cervantes, C.Y.; Taud, H. A sensorless passivity-based control for the DC/DC Buck converter–inverter–DC motor system. IEEE Latin Am. Trans. 2016, 14, 4227–4234. [Google Scholar] [CrossRef]
- Hernández-Márquez, E.; García-Sánchez, J.R.; Silva-Ortigoza, R.; Antonio-Cruz, M.; Hernández-Guzmán, V.M.; Taud, H.; Marcelino-Aranda, M. Bidirectional tracking robust controls for a DC/DC Buck converter-DC motor system. Complexity 2017, in press. [Google Scholar]
- García-Rodríguez, V.H.; Silva-Ortigoza, R.; Hernández-Márquez, E.; García-Sánchez, J.R.; Ponce-Silva, M.; Saldaña-González, G. A DC motor driven by a DC/DC Boost converter-inverter: Modeling and simulation. In Proceedings of the 2016 International Conference on Mechatronics, Electronics and Automotive Engineering, ICMEAE 2016, Cuernavaca, Morelos, Mexico, 22–25 November 2016; pp. 78–83. [Google Scholar]
- García-Rodríguez, V.H.; García-Sánchez, J.R.; Silva-Ortigoza, R.; Hernández-Márquez, E.; Taud, H.; Ponce-Silva, M.; Saldaña-González, G. Passivity based control for the Boost converter-inverter- DC motor system. In Proceedings of the 2017 International Conference on Mechatronics, Electronics and Automotive Engineering, ICMEAE 2017, Cuernavaca, Morelos, Mexico, 21–24 November 2017; pp. 77–81. [Google Scholar]
- Hernández-Márquez, E.; Silva-Ortigoza, R.; García-Sánchez, J.R.; García-Rodríguez, V.H.; Alba-Juárez, J.N. A new DC/DC Buck-Boost converter–DC motor system: Modeling and experimental validation. IEEE Latin Am. Trans. 2017, 15, 2043–2049. [Google Scholar] [CrossRef]
- Hernández-Márquez, E.; Silva-Ortigoza, R.; García-Sánchez, J.R.; Marcelino-Aranda, M.; Saldaña-González, G. A DC/DC Buck-Boost converter-inverter-DC motor system: Sensorless passivity-based control. IEEE Access 2018, 6, 31486–31492. [Google Scholar] [CrossRef]
- Linares-Flores, J.; Sira-Ramírez, H.; Cuevas-López, E.F.; Contreras-Ordaz, M.A. Sensorless passivity based control of a DC motor via a solar powered Sepic converter-full bridge combination. J. Power Electron. 2011, 11, 743–750. [Google Scholar] [CrossRef]
- Hernández-Guzmán, V.M.; Silva-Ortigoza, R.; Carrillo-Serrano, R.V. Control Automático: Teoría de Diseño, Construcción de Prototipos, Modelado, Identificación y Pruebas Experimentales; Colección CIDETEC-IPN: Mexico City, Mexico, 2013; ISBN 978-607-414-362-1. [Google Scholar]
- Sira-Ramírez, H.; Silva-Ortigoza, R. Control Design Techniques in Power Electronics Devices; Springer-Verlag: London, UK, 2006; ISBN 978-1-84628-458-8. [Google Scholar]
- Silva-Ortigoza, R.; Sira-Ramírez, H.; Hernández-Guzmán, V.M. Control por modos deslizantes y planitud diferencial de un convertidor de CD/CD Boost: Resultados experimentales. Rev. Iberoam. Autom. Inform. Ind. 2008, 5, 77–82. [Google Scholar] [CrossRef]
- Biagiotti, L.; Melchiorri, C. Trajectory Planning for Automatic Machines and Robots; Springer-Verlag: London, UK, 2008; ISBN 978-3-540-85628-3. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
García-Rodríguez, V.H.; Silva-Ortigoza, R.; Hernández-Márquez, E.; García-Sánchez, J.R.; Taud, H. DC/DC Boost Converter–Inverter as Driver for a DC Motor: Modeling and Experimental Verification. Energies 2018, 11, 2044. https://doi.org/10.3390/en11082044
García-Rodríguez VH, Silva-Ortigoza R, Hernández-Márquez E, García-Sánchez JR, Taud H. DC/DC Boost Converter–Inverter as Driver for a DC Motor: Modeling and Experimental Verification. Energies. 2018; 11(8):2044. https://doi.org/10.3390/en11082044
Chicago/Turabian StyleGarcía-Rodríguez, Víctor Hugo, Ramón Silva-Ortigoza, Eduardo Hernández-Márquez, José Rafael García-Sánchez, and Hind Taud. 2018. "DC/DC Boost Converter–Inverter as Driver for a DC Motor: Modeling and Experimental Verification" Energies 11, no. 8: 2044. https://doi.org/10.3390/en11082044