MPPT and SPPT Control for PV-Connected Inverters Using Digital Adaptive Hysteresis Current Control



Abstract
:1. Introduction
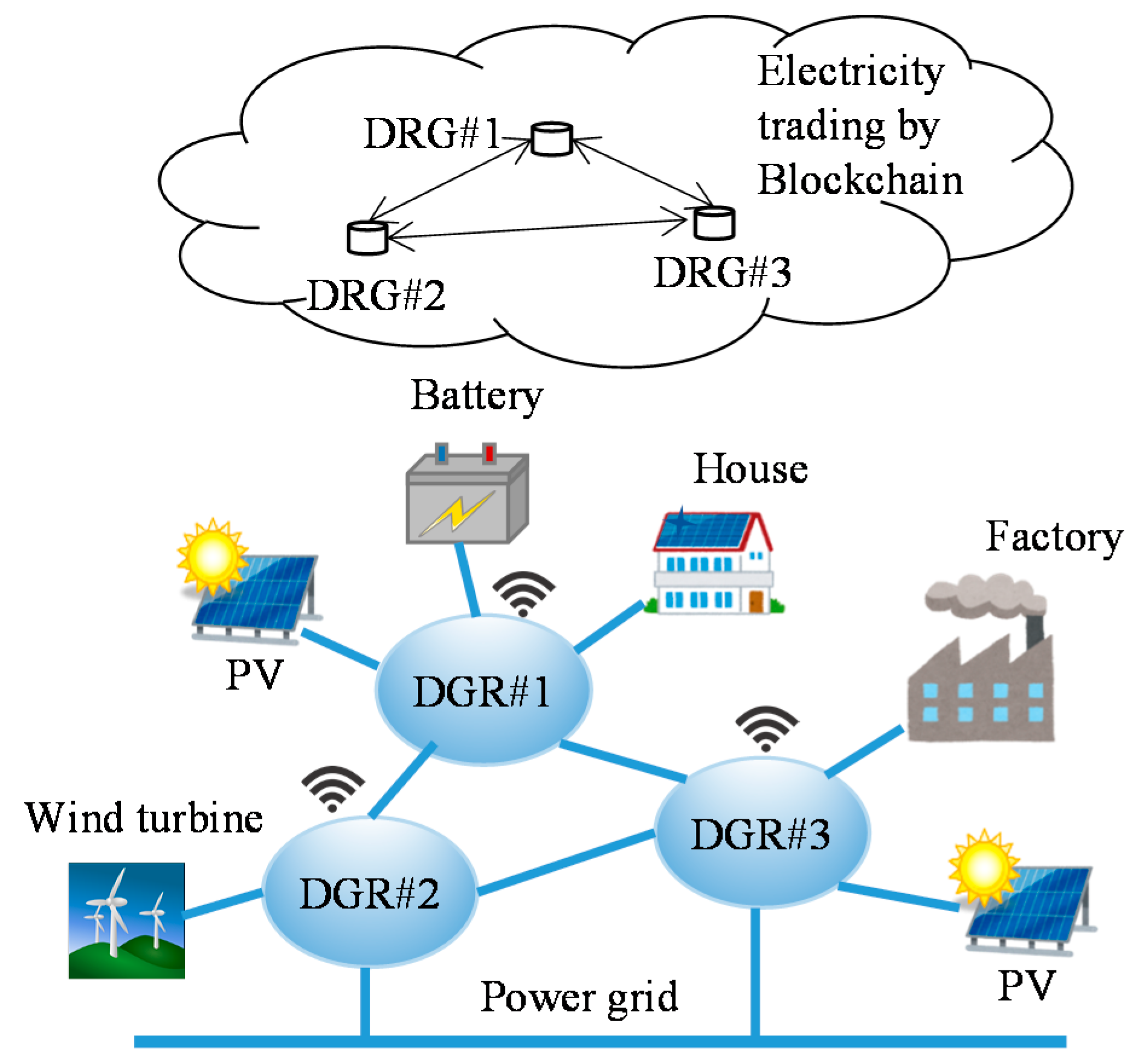
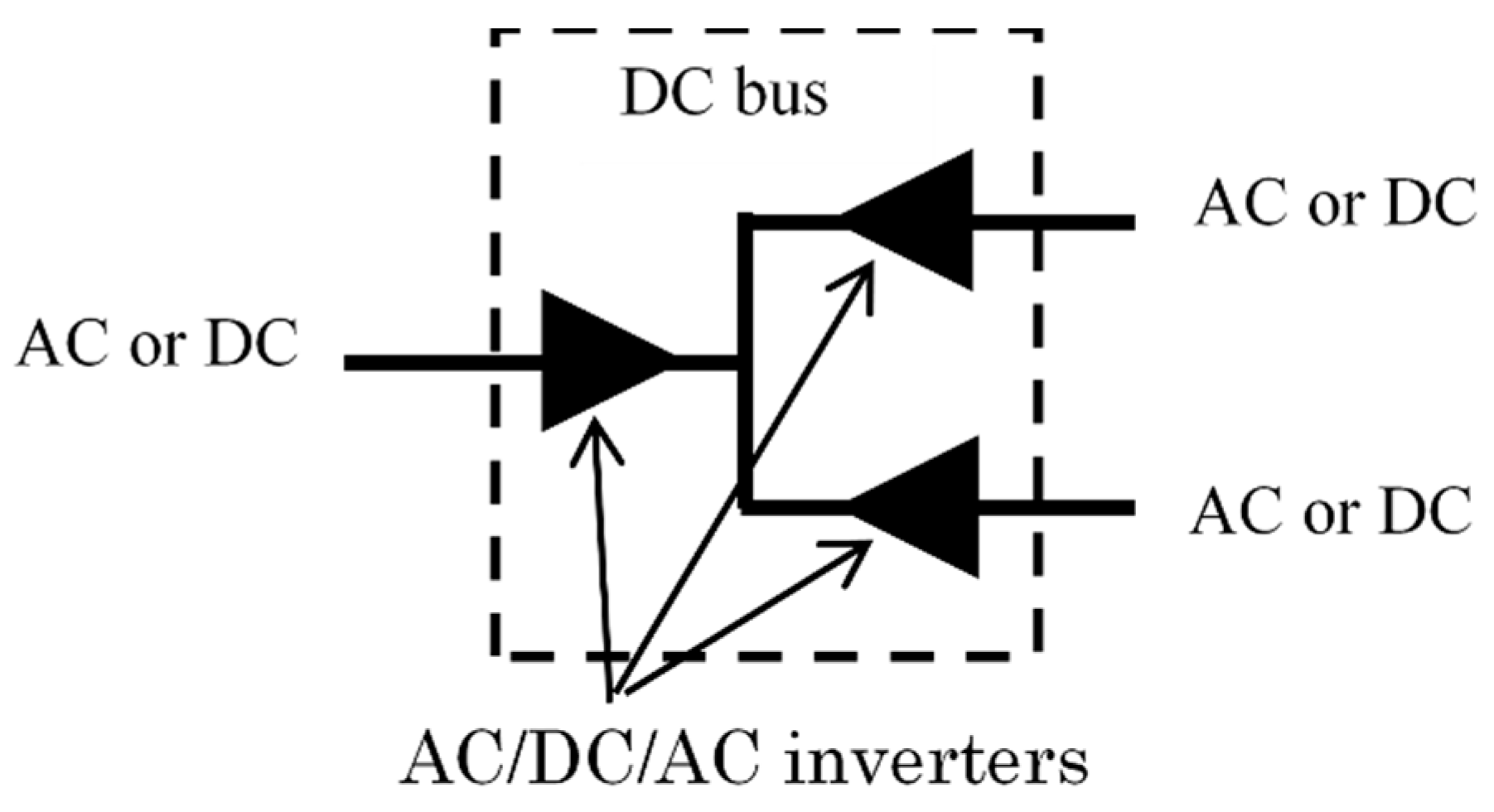
2. Digital Grid Router
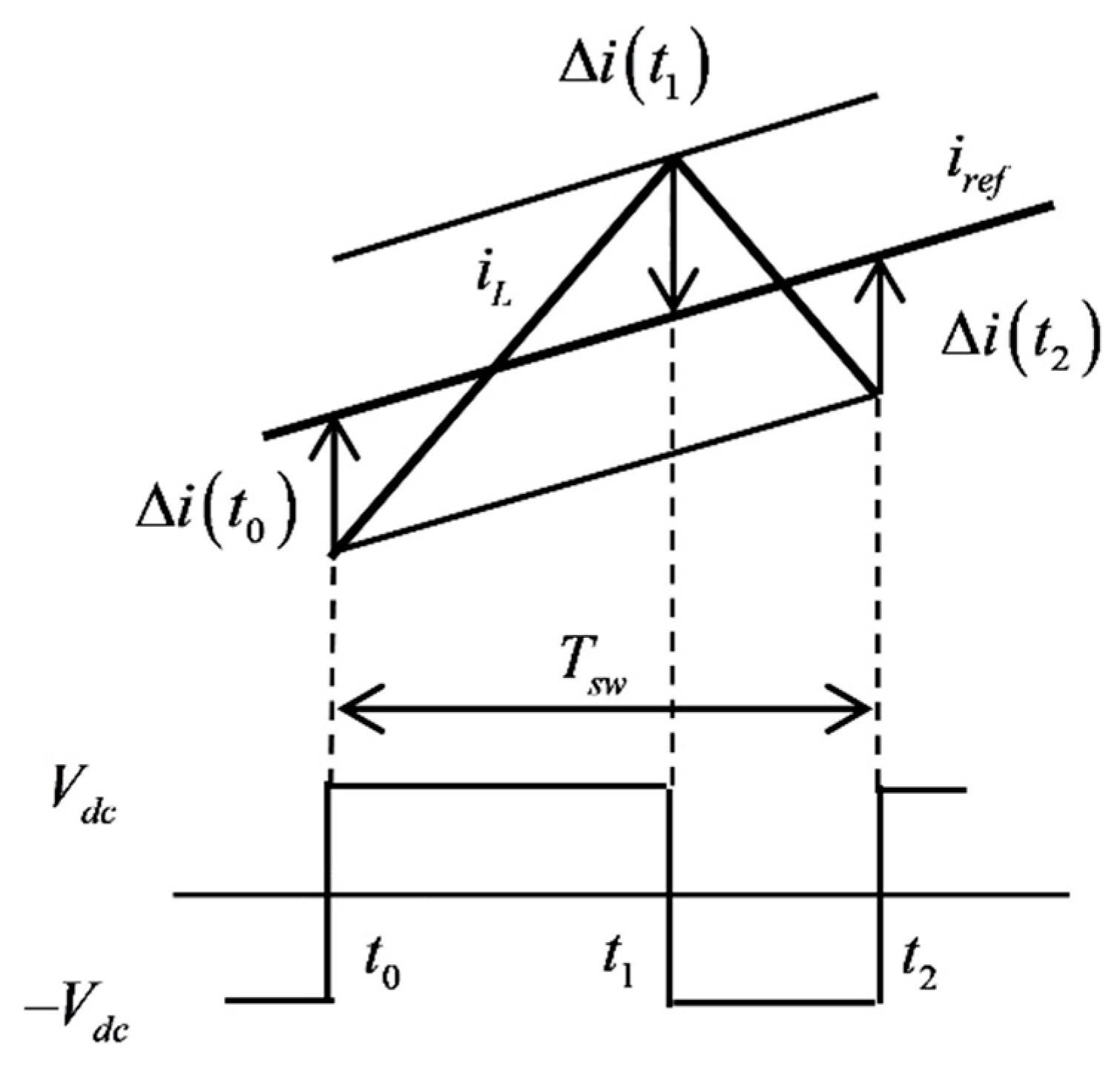
3. Adaptive Hysteresis Current Control
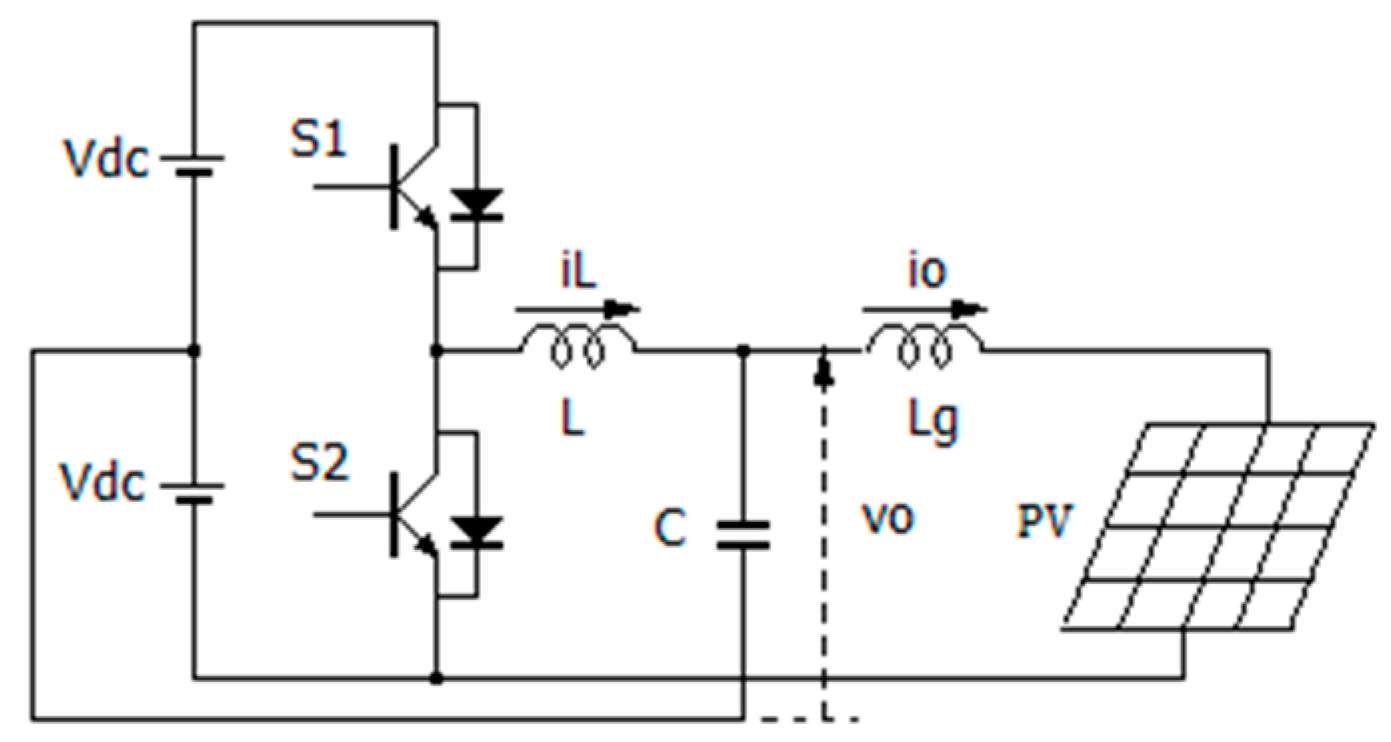
4. Hysteresis Current Control for PV-Connected Inverter
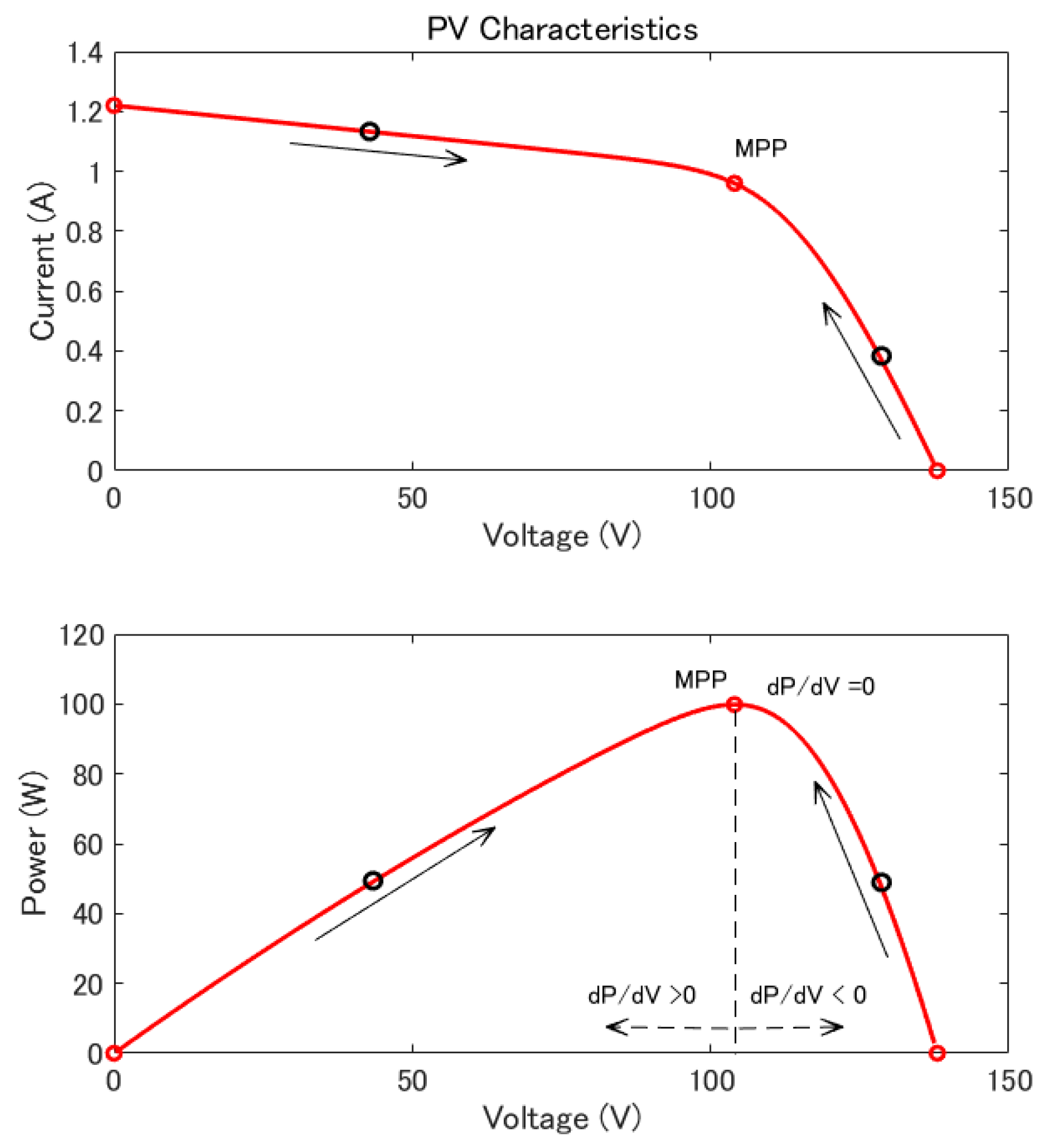
4.1. Algorithm for MPPT Control
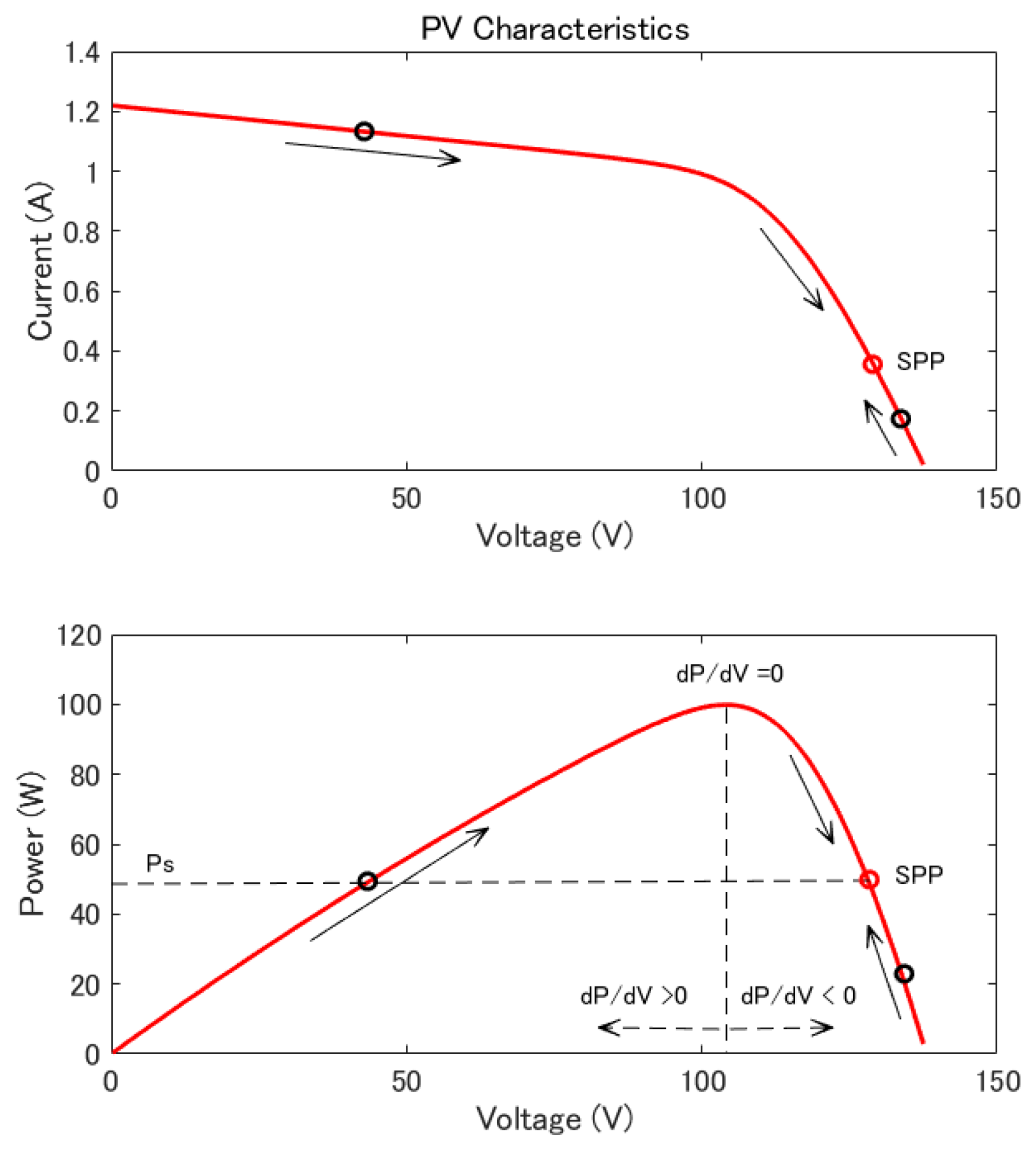
4.2. Algorithm for SPPT Control
5. Experimental Results
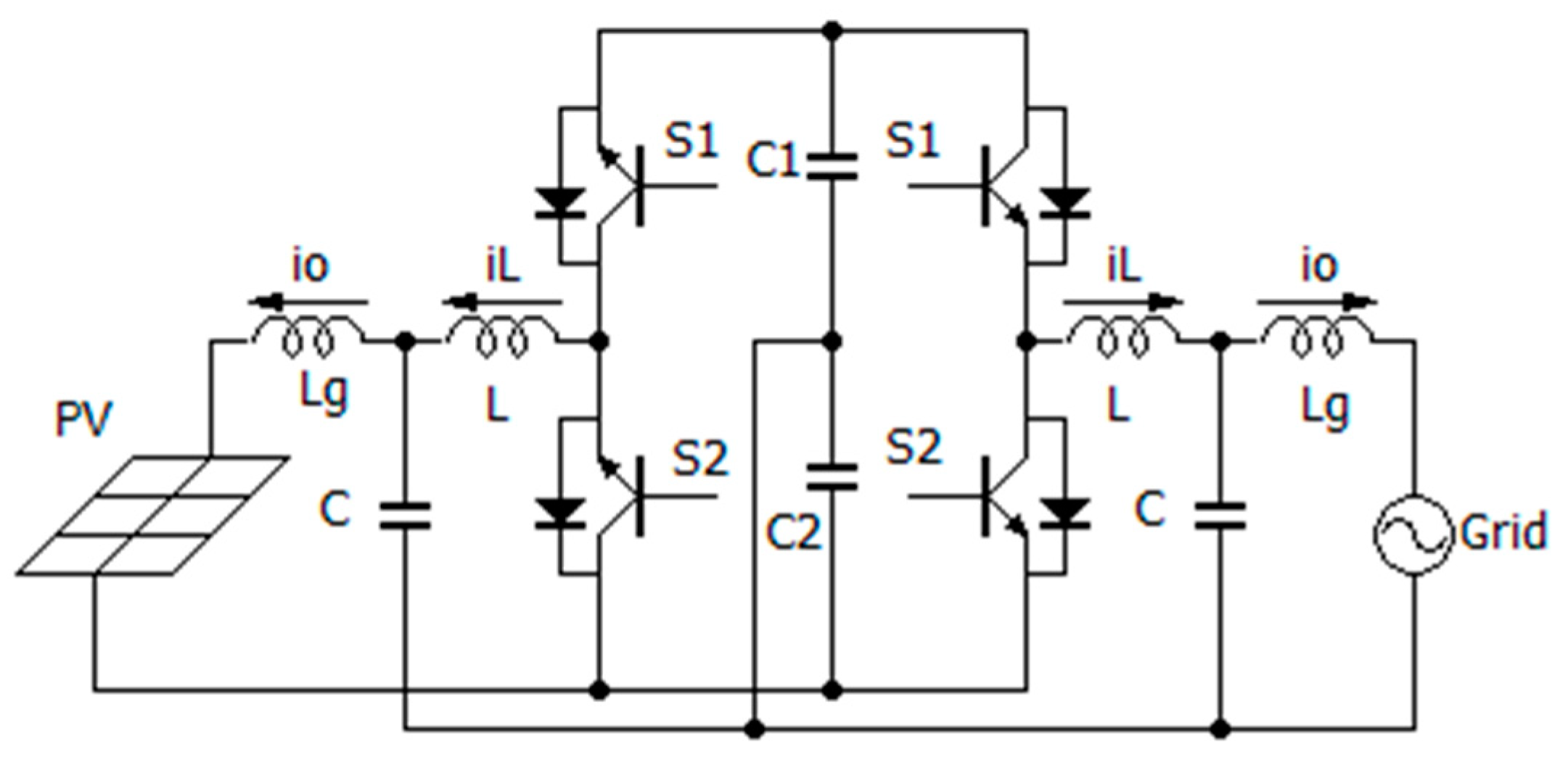
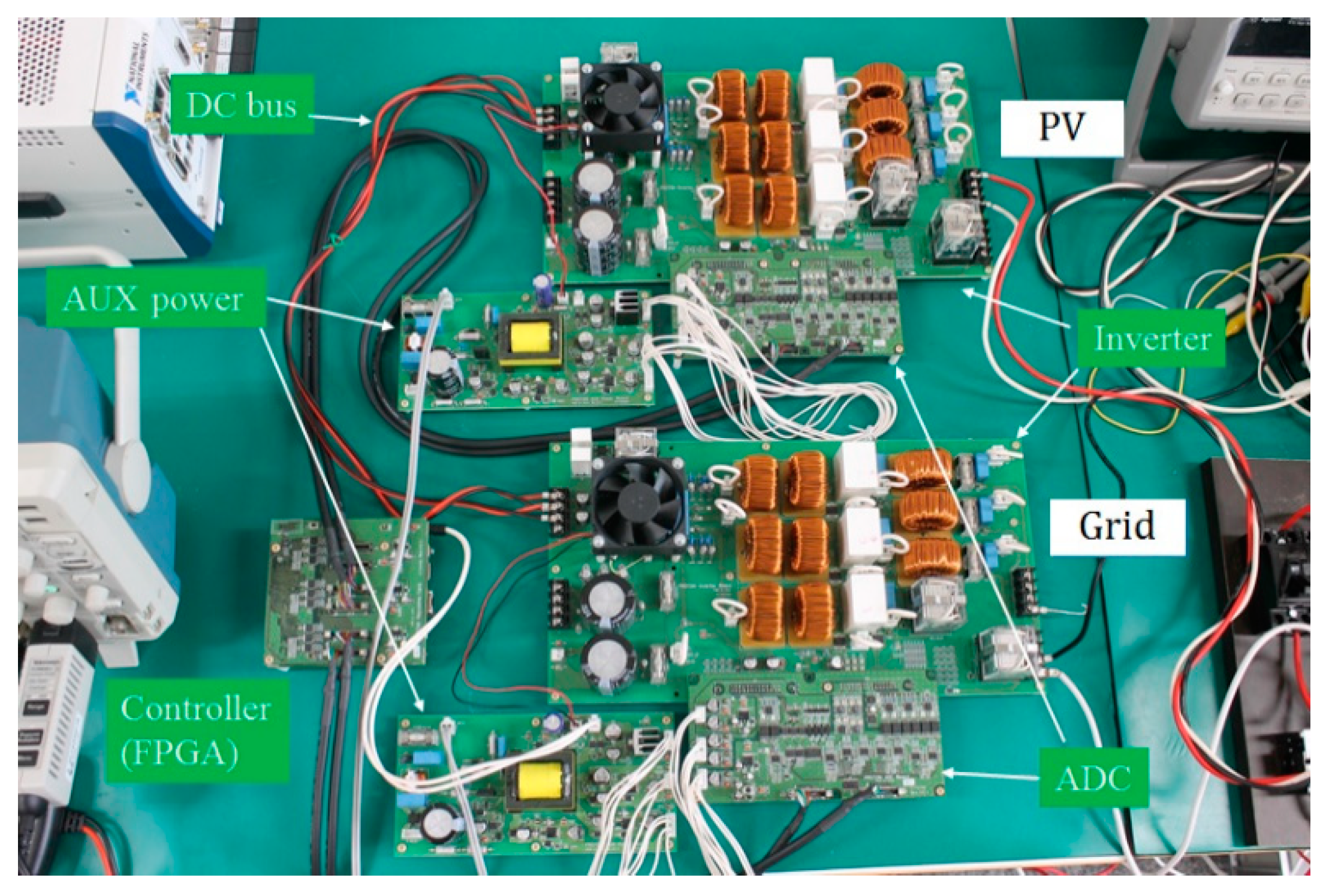
5.1. Grid-Connected PV System
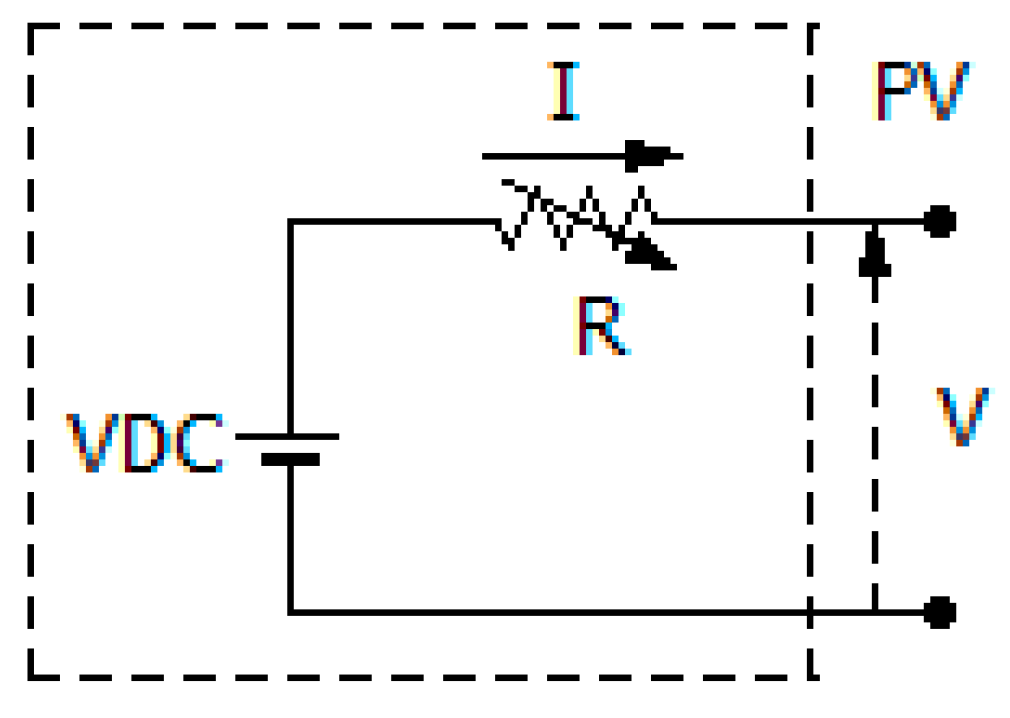
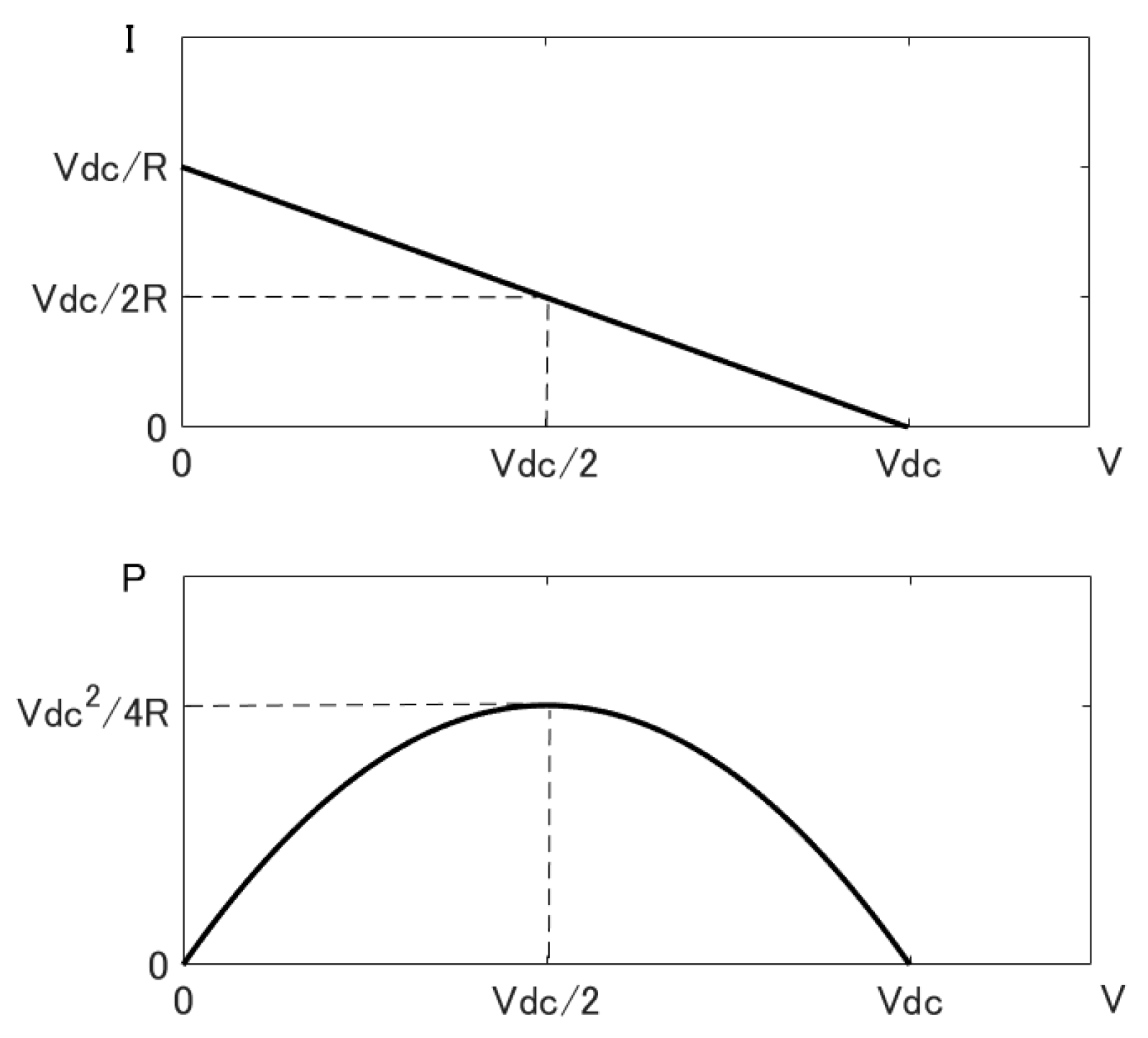
5.2. Simple Model for PV Panel
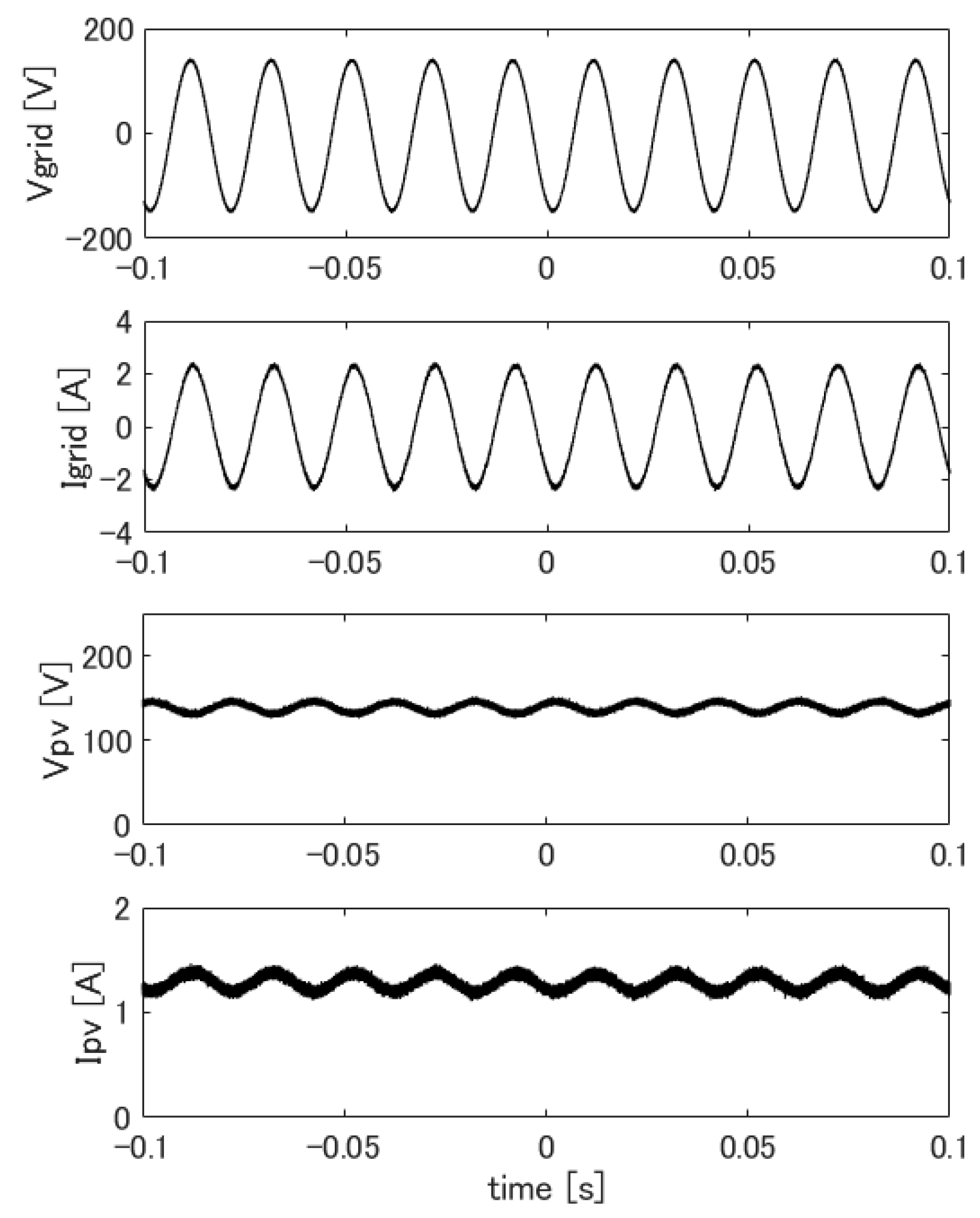
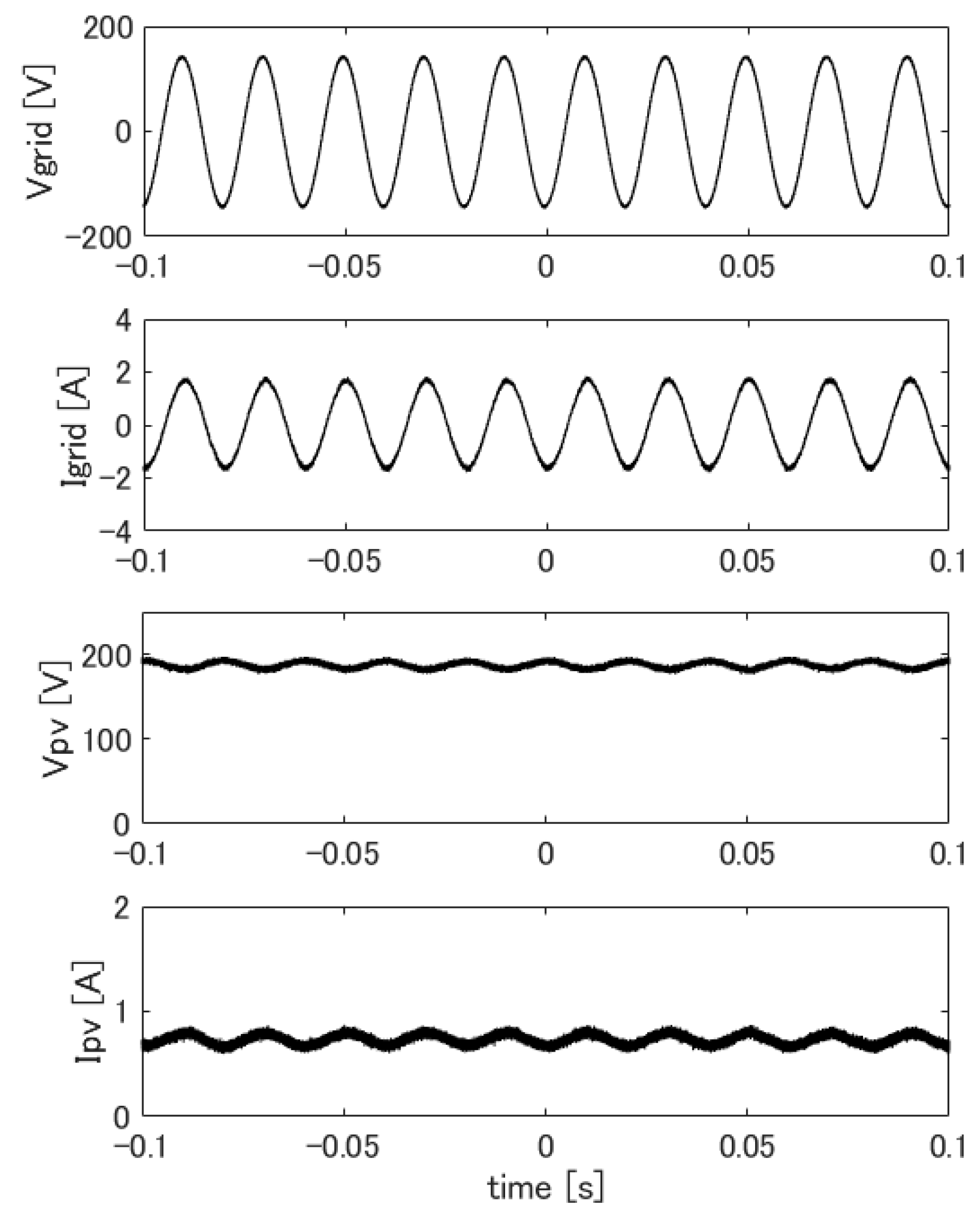
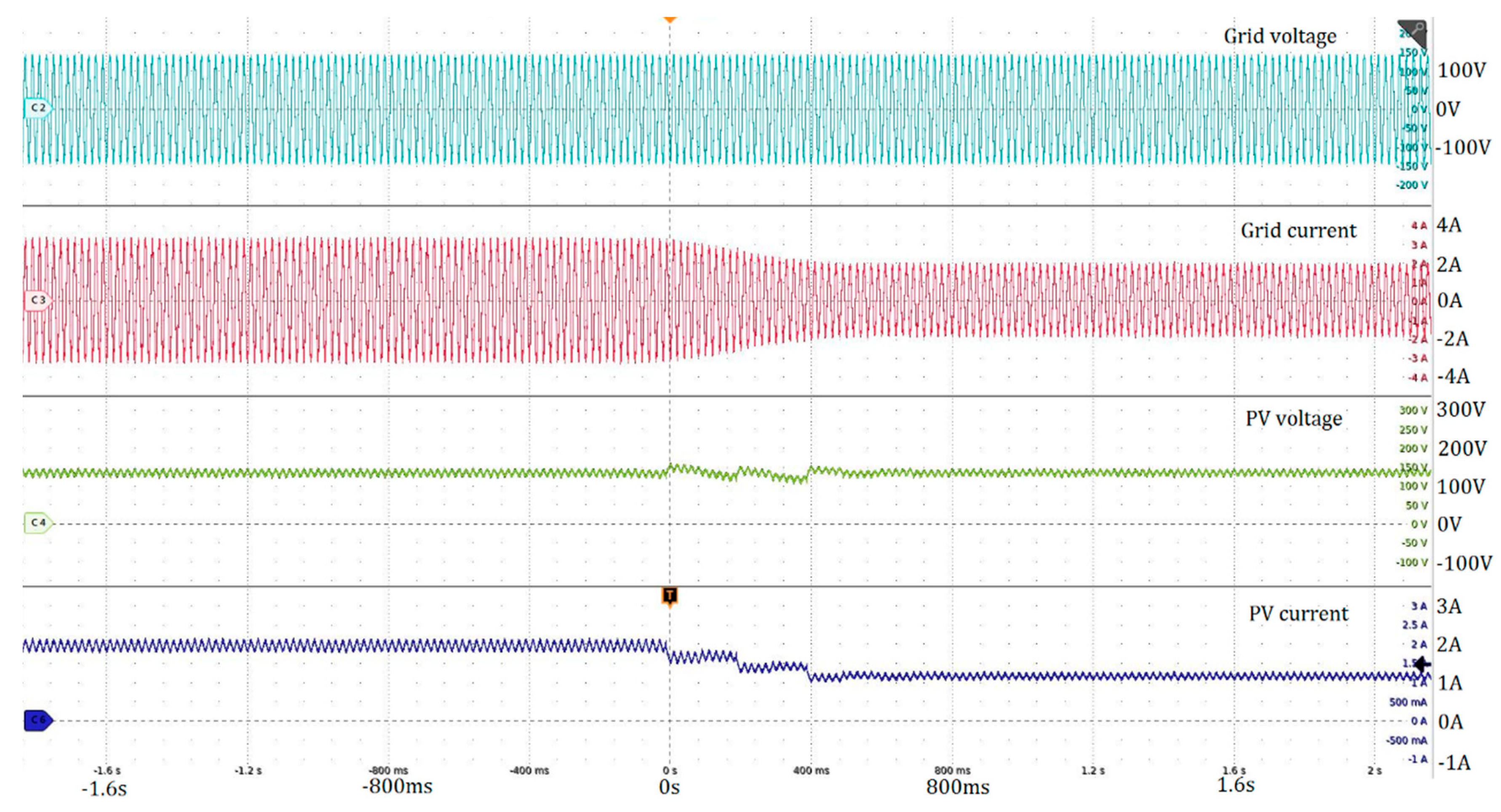
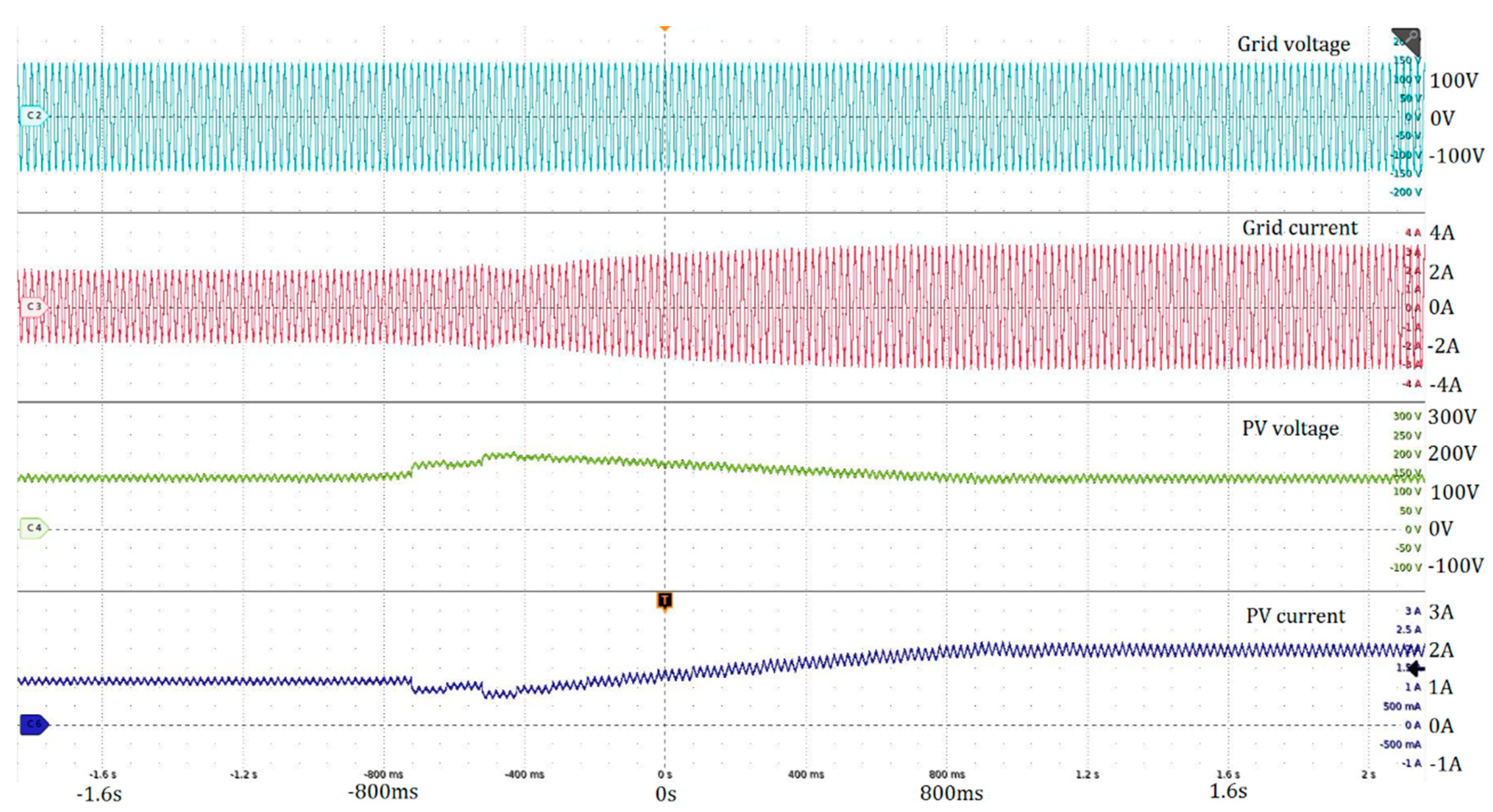
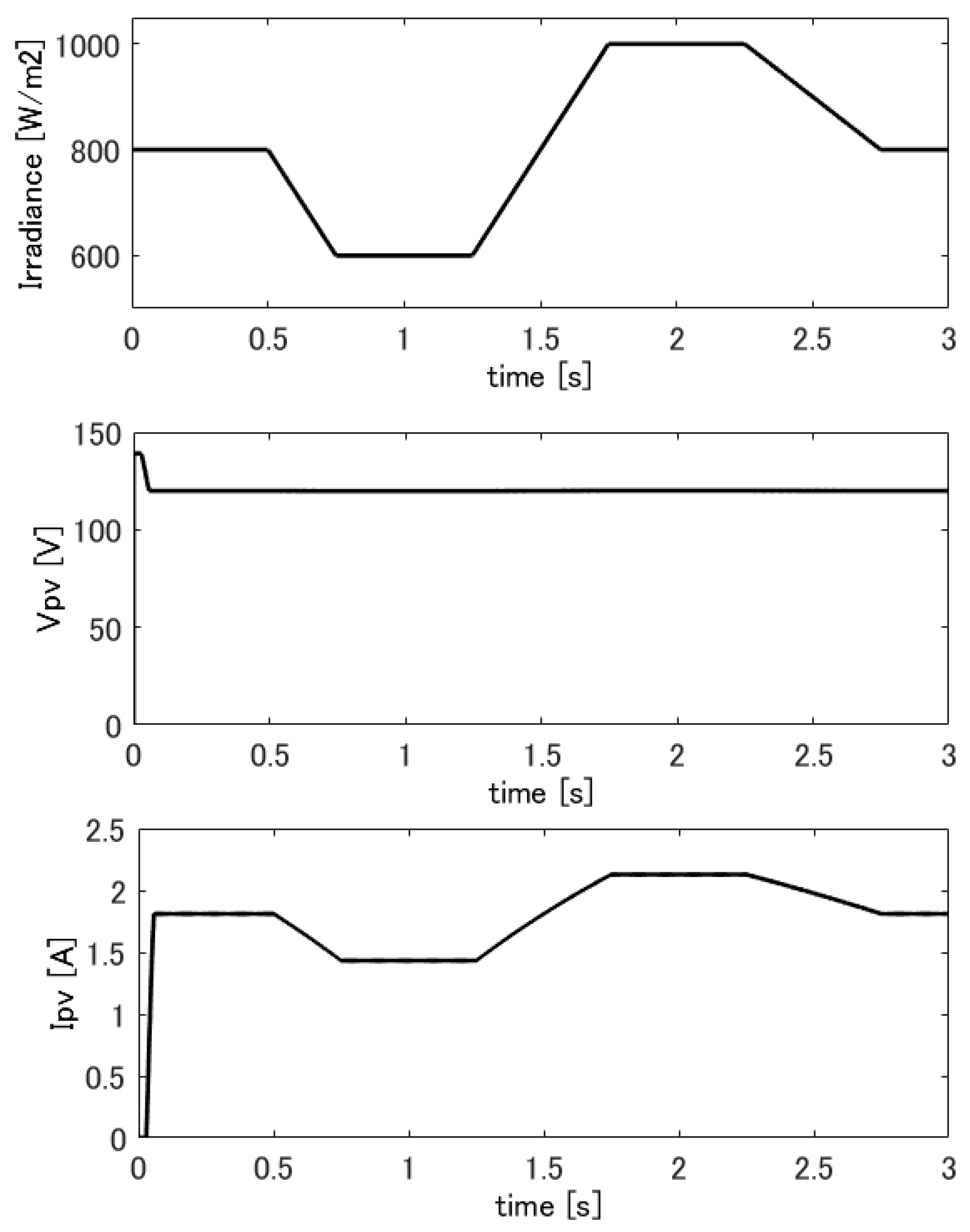
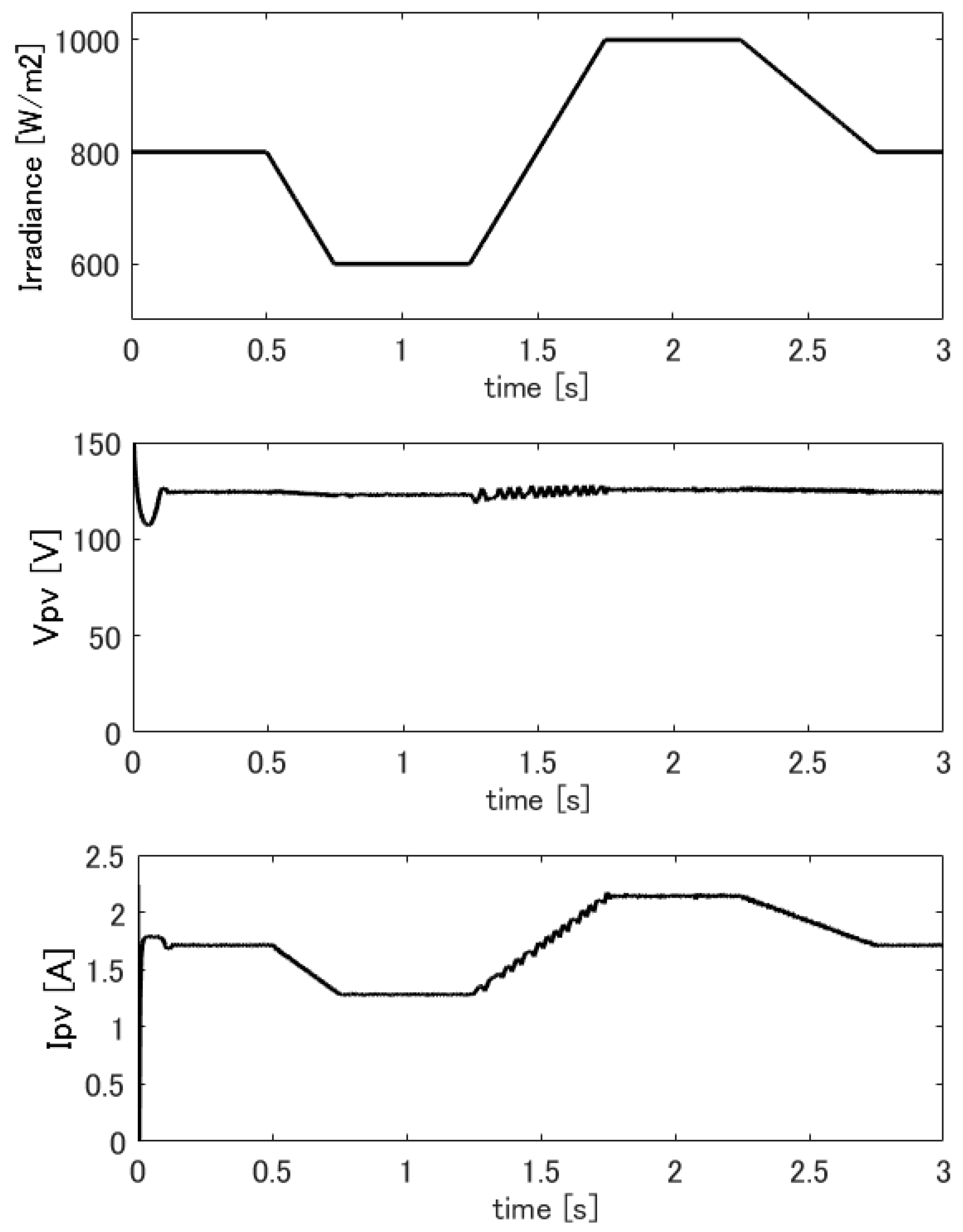
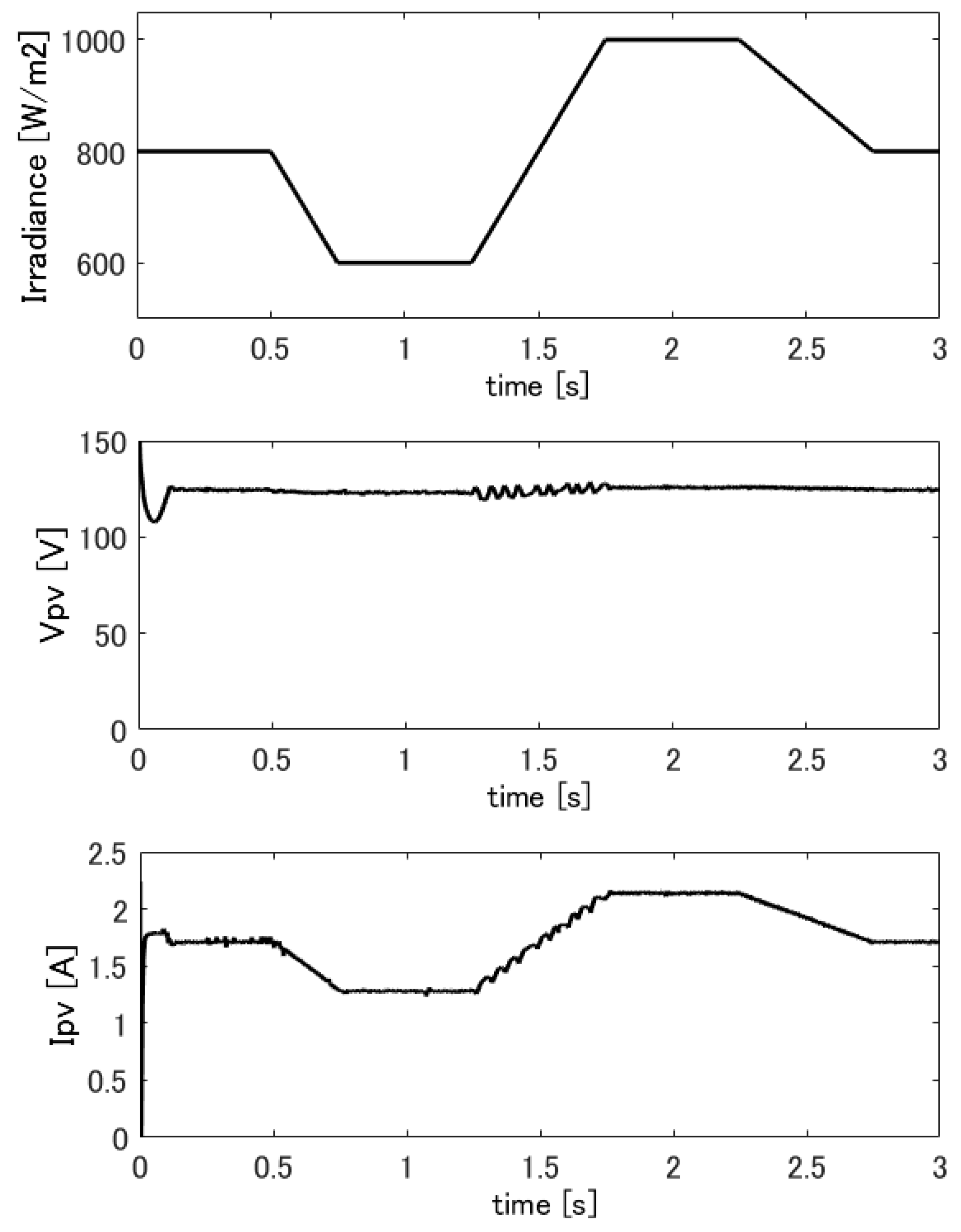
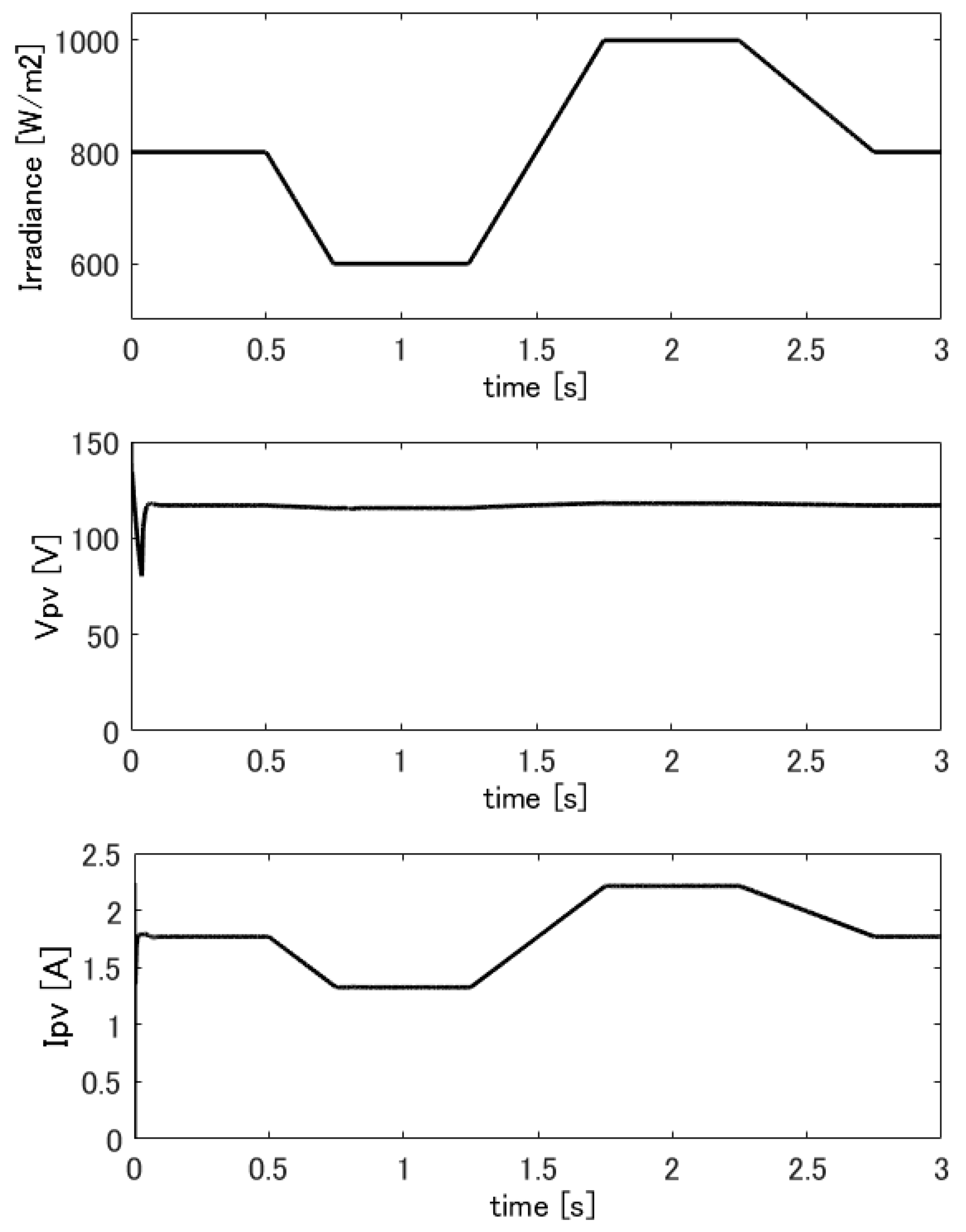
5.3. Experimental Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kouro, S.; Leon, J.I.; Vinnikov, D.; Franquelo, L.G. Grid-Connected Photovoltaic Systems: An Overview of Recent Research and Emerging PV Converter Technology. IEEE Ind. Electron. Mag. 2015, 9, 47–61. [Google Scholar] [CrossRef]
- Algarín, C.R.; Giraldo, J.T.; Álvarez, O.R. Fuzzy Logic Based MPPT Controller for a PV System. Energies 2017, 10, 2036. [Google Scholar] [CrossRef]
- Islam, H.; Mekhilef, S.; Shah, N.B.M.; Soon, T.K.; Seyedmahmousian, M.; Horan, B.; Stojcevski, A. Performance Evaluation of Maximum Power Point Tracking Approaches and Photovoltaic Systems. Energies 2018, 11, 365. [Google Scholar] [CrossRef]
- Khayyer, P.; Özgüner, Ü. Decentralized Control of Large-Scale Storage-Based Renewable Energy Systems. IEEE Trans. Smart Grid 2014, 5, 1300–1307. [Google Scholar] [CrossRef]
- Marwali, M.N.; Dai, M.; Keyhani, A. Robust stability analysis of voltage and current control for distributed generation systems. IEEE Trans. Energy Convers. 2006, 21, 516–526. [Google Scholar] [CrossRef]
- Yamaya, H.; Ohigashi, T.; Matsukawa, H.; Kaizuka, I.; Ikki, O. PV market in Japan and impacts of grid constriction. In Proceedings of the IEEE 42nd Photovoltaic Specialist Conference (PVSC), New Orleans, LA, USA, 14–19 June 2015; pp. 1–6. [Google Scholar]
- Abe, R.; Taoka, H.; McQuilkin, D. Digital Grid: Communicative Electrical Grids of the Future. IEEE Trans. Smart Grid 2011, 2, 399–410. [Google Scholar] [CrossRef] [Green Version]
- Irwin, J.D. Control in Power Electronics: Selected Problems, 1st ed.; Academic Press: New York, NY, USA, 2002. [Google Scholar]
- Vázquez, G.; Rodriguez, P.; Ordoñez, R.; Kerekes, T.; Teodorescu, R. Adaptive hysteresis band current control for transformerless single-phase PV inverters. In Proceedings of the 35th Annual Conference of IEEE Industrial Electronics, Porto, Portugal, 3–5 November 2009; pp. 173–177. [Google Scholar]
- Kumar, N.; Hussain, I.; Singh, B.; Panigrahi, B.K. Normal Harmonic Search Algorithm Based MPPT for Solar PV System and Integrated with Grid using Reduced Sensor Approach and PNKLMS Algorithm. IEEE Trans. Ind. Appl. 2018. [Google Scholar] [CrossRef]
- Bhatnagar, P.; Nema, R.K. A maximum power point tracking algorithm for photovoltaic systems using bang-bang controller. J. Renew. Sustain. Energy 2014, 6, 053126. [Google Scholar] [CrossRef]
- Buso, S.; Malesani, L.; Mattavelli, P. Comparison of current control techniques for active filter applications. IEEE Trans. Ind. Electron. 1998, 45, 722–729. [Google Scholar] [CrossRef] [Green Version]
- Attaianese, C.; Monaco, M.D.; Tomasso, G. High Performance Digital Hysteresis Control for Single Source Cascaded Inverters. IEEE Trans. Ind. Inform. 2013, 9, 620–629. [Google Scholar] [CrossRef]
- Nguyen-Van, T.; Abe, R.; Tanaka, K. Stability of FPGA Based Emulator for Half-bridge Inverters Operated in Stand-alone and Grid-connected Modes. IEEE Access 2018, 6, 3603–3610. [Google Scholar] [CrossRef]
- Schaefer, M.; Hofmann, M.; Raab, S.; Ackva, A. FPGA Based Control of an Three Level Neutral Point Clamped Inverter. In Proceedings of the Europe 2017 International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management, Nuremberg, Germany, 16–18 May 2017; pp. 1–6. [Google Scholar]
- Nguyen-Van, T.; Abe, R.; Tanaka, K. A Digital Hysteresis Current Control for Half-Bridge Inverters with Constrained Switching Frequency. Energies 2017, 10, 1610. [Google Scholar] [CrossRef]
- Devaraj, D.; Sakthivel, S.; Punitha, K. Modeling of photovoltaic array and simulation of adaptive hysteresis current controlled inverter for solar application. In Proceedings of the 3rd International Conference on Electronics Computer Technology, Kanyakumari, India, 8–10 April 2011; pp. 302–306. [Google Scholar]
- Nguyen-Van, T.; Abe, R.; Tanaka, K. Digital Adaptive Hysteresis Current Control for Multi-functional Half-bridge Inverters. IEEE Trans. Power Electron. Under Reviewed.
- Takagi, S. The Japanese equity market: Past and present. J. Bank. Fin. 1989, 13, 537–570. [Google Scholar] [CrossRef]
- Nedumgatt, J.J.; Jayakrishnan, K.B.; Umashankar, S.; Vijayakumar, D.; Kothari, D.P. Perturb and observe MPPT algorithm for solar PV systems-modeling and simulation. In Proceedings of the 2011 Annual IEEE India Conference, Hyderabad, India, 16–18 December 2011; pp. 1–6. [Google Scholar]
- Safari, A.; Mekhilef, S. Incremental conductance MPPT method for PV systems. In Proceedings of the 24th Canadian Conference on Electrical and Computer Engineering (CCECE), Niagara Falls, ON, Canada, 8–11 May 2011; pp. 345–347. [Google Scholar]
- Ahmad, J. A fractional open circuit voltage based maximum power point tracker for photovoltaic arrays. In Proceedings of the 2nd International Conference on Software Technology and Engineering, San Juan, PR, USA, 3–5 October 2010; pp. V1-247–V1-250. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Resistor | Measured Current | Measured Voltage | Measured Power | Calculated Power |
|---|---|---|---|---|
| 100 | 1.19 | 131 | 155 | 156 |
| 80 | 1.38 | 140 | 194 | 195 |
| 60 | 1.87 | 136 | 254 | 260 |
| Resistor | Measured Current | Measured Voltage | Measured Power | Specified Power |
|---|---|---|---|---|
| 100 | 0.9 | 161 | 145 | 150 |
| 80 | 0.76 | 191 | 144 | |
| 60 | 0.72 | 208 | 148 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen-Van, T.; Abe, R.; Tanaka, K. MPPT and SPPT Control for PV-Connected Inverters Using Digital Adaptive Hysteresis Current Control. Energies 2018, 11, 2075. https://doi.org/10.3390/en11082075
Nguyen-Van T, Abe R, Tanaka K. MPPT and SPPT Control for PV-Connected Inverters Using Digital Adaptive Hysteresis Current Control. Energies. 2018; 11(8):2075. https://doi.org/10.3390/en11082075
Chicago/Turabian StyleNguyen-Van, Triet, Rikiya Abe, and Kenji Tanaka. 2018. "MPPT and SPPT Control for PV-Connected Inverters Using Digital Adaptive Hysteresis Current Control" Energies 11, no. 8: 2075. https://doi.org/10.3390/en11082075
APA StyleNguyen-Van, T., Abe, R., & Tanaka, K. (2018). MPPT and SPPT Control for PV-Connected Inverters Using Digital Adaptive Hysteresis Current Control. Energies, 11(8), 2075. https://doi.org/10.3390/en11082075