Analysis of Nonlinear Dynamics of a Quadratic Boost Converter Used for Maximum Power Point Tracking in a Grid-Interlinked PV System

 , , , and
, , , and
Abstract
:1. Introduction
- Development of a methodology to accurately predict subharmonic oscillation in switching converters used for MPPT for PV applications considering the nonlinearity of the PV energy source and the saturability of the inductors.
- Analytical and experimental determination of subharmonic oscillation boundaries in terms of relevant system parameters of different nature.
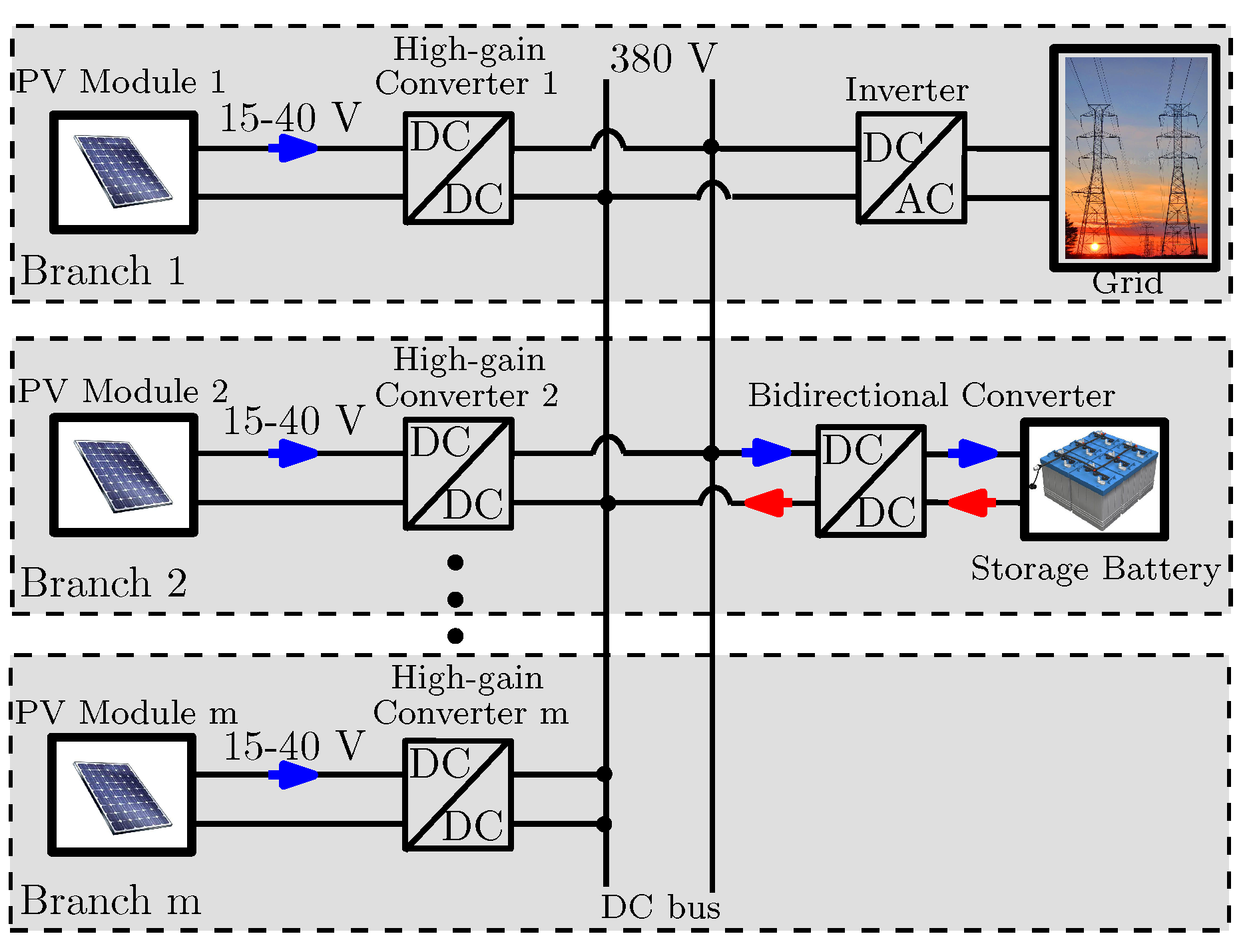
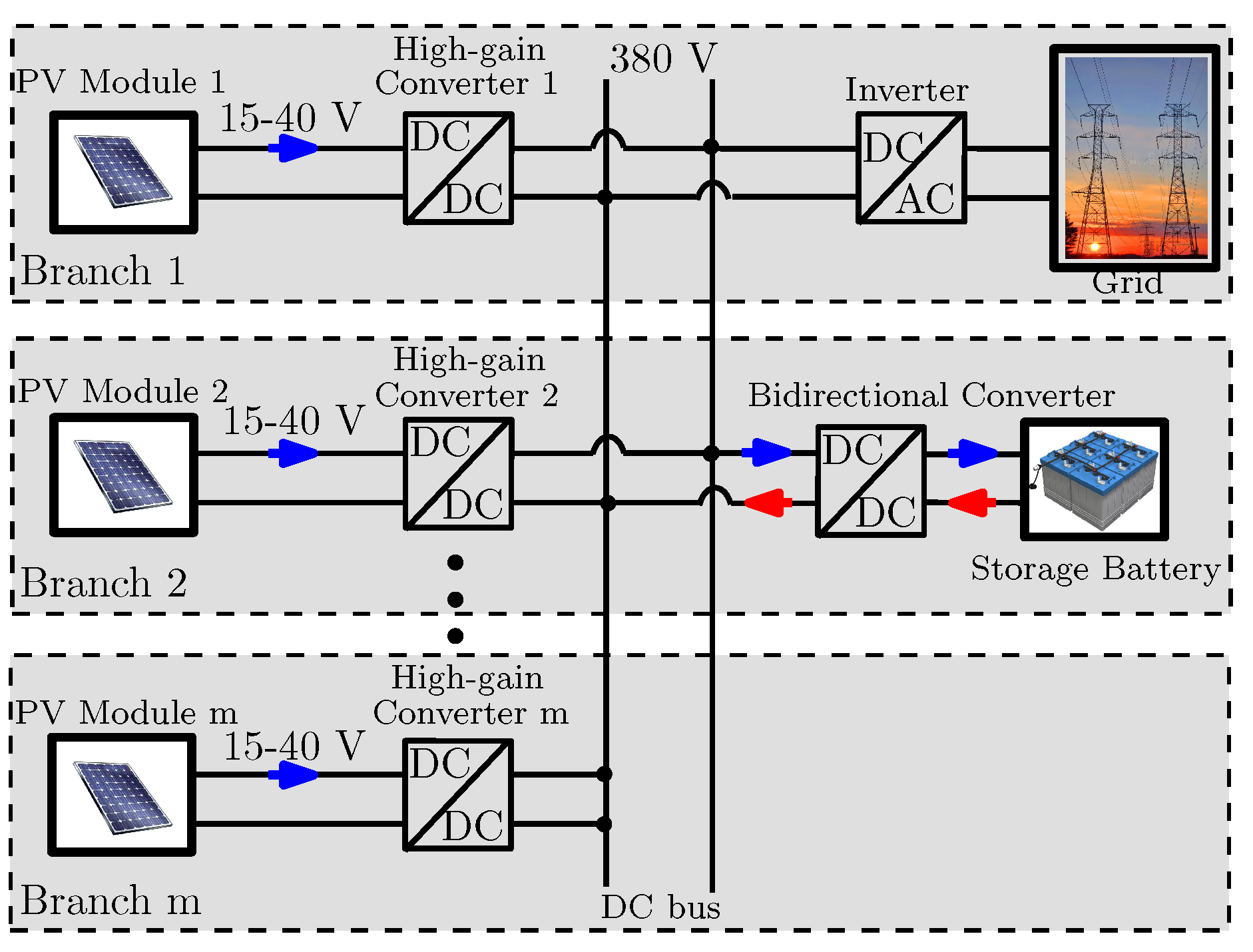
2. System Description and its Mathematical Modeling
2.1. Operation Principle
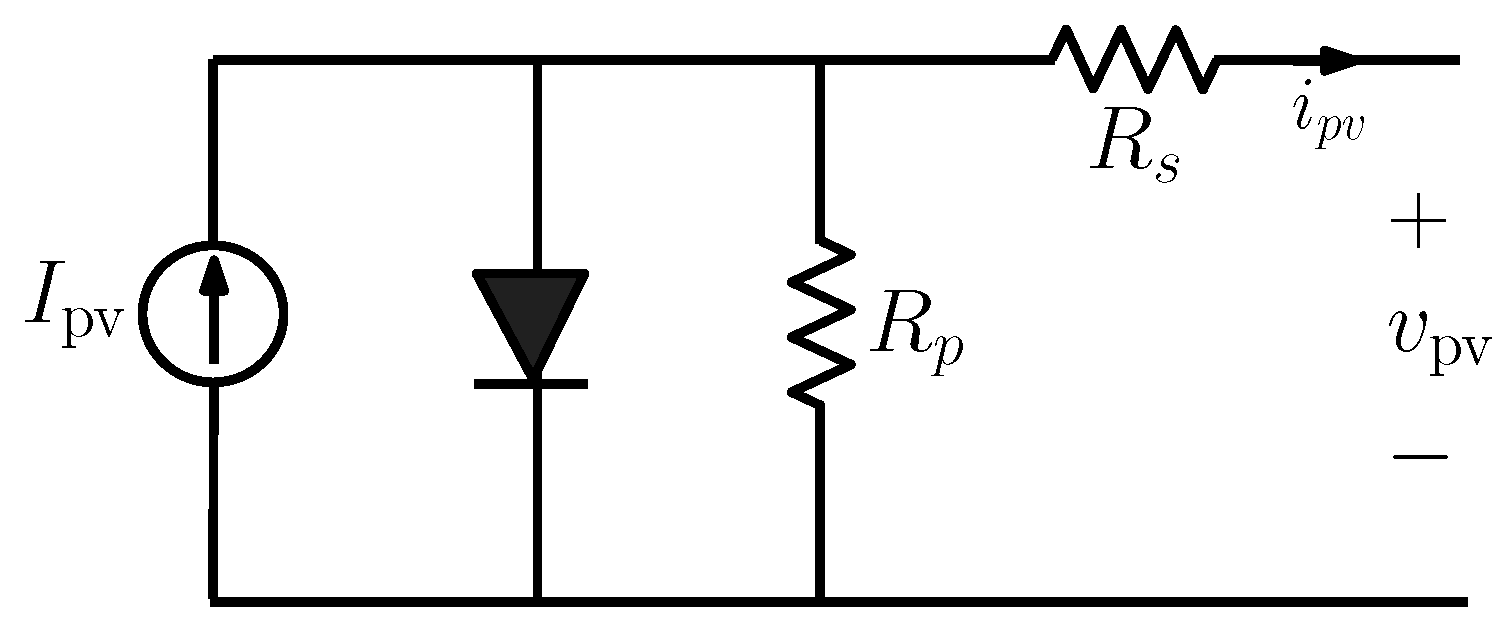
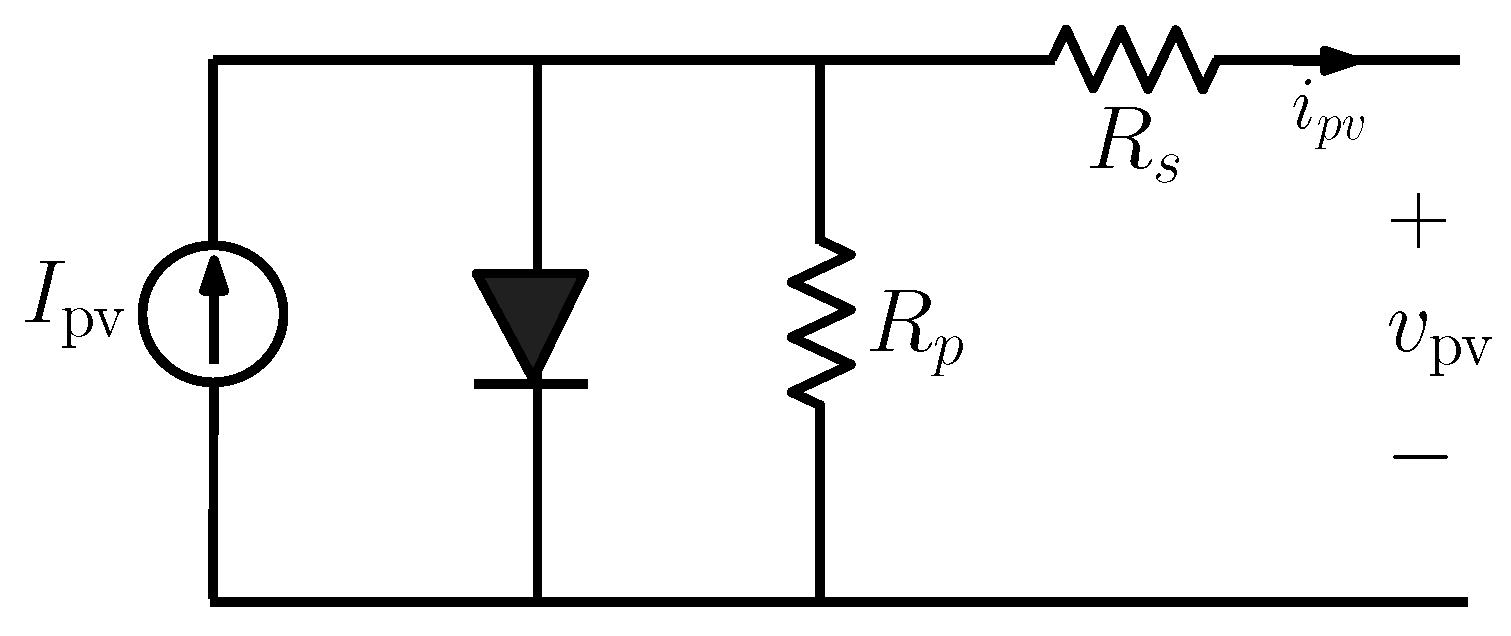
2.2. The Nonlinear Model of a PV Generator
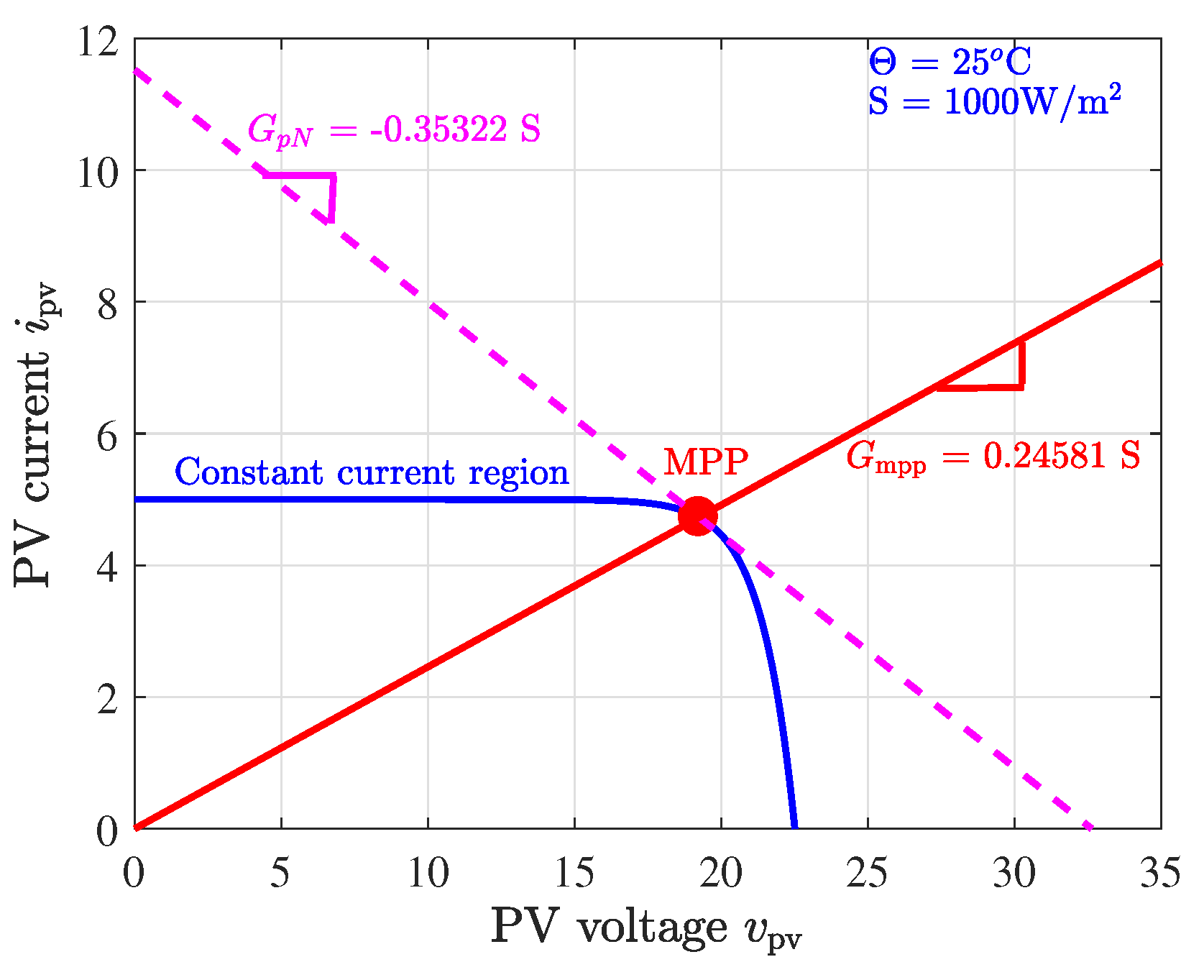
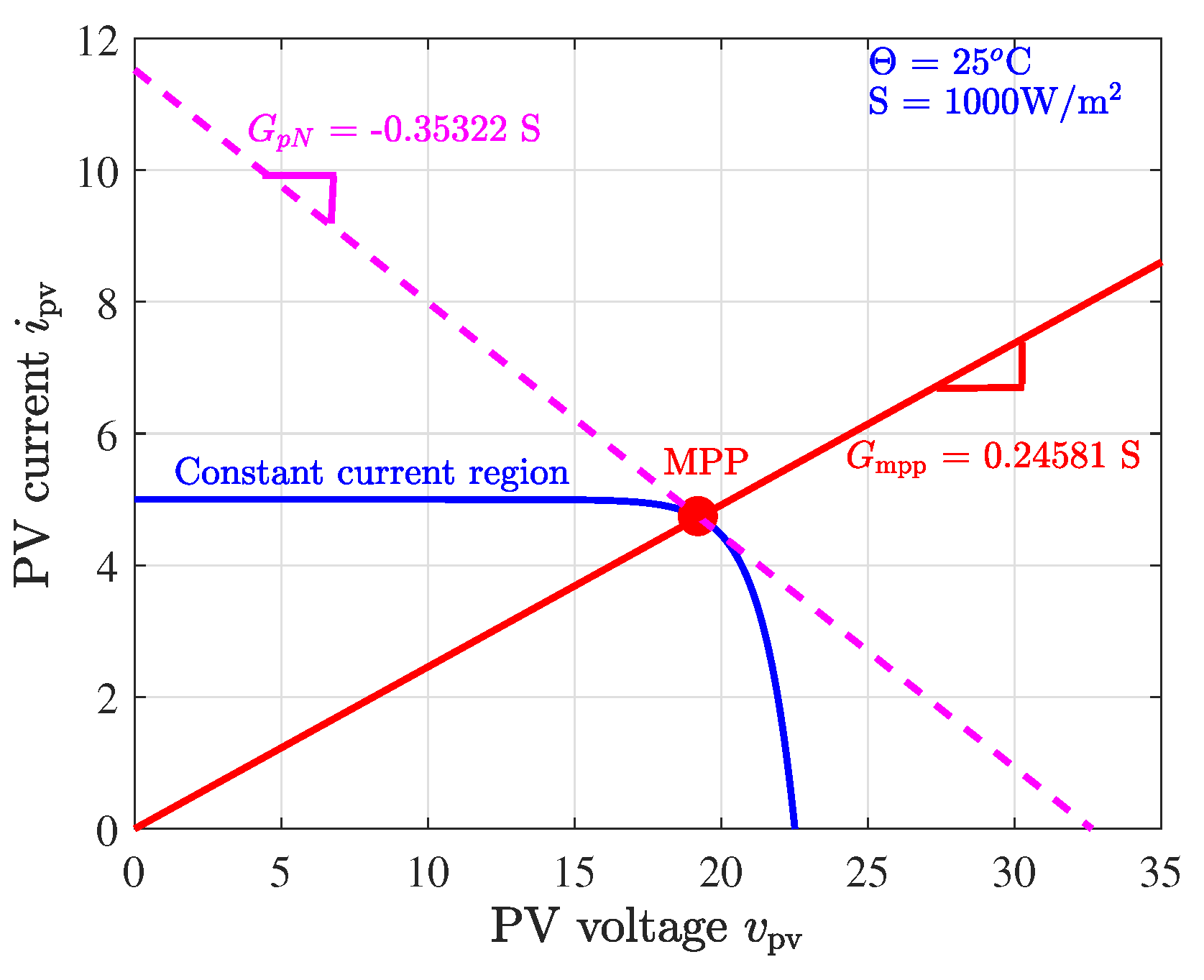
2.3. The PV Generator Model Close to the MPP
2.4. Modeling of the DC-AC Inverter
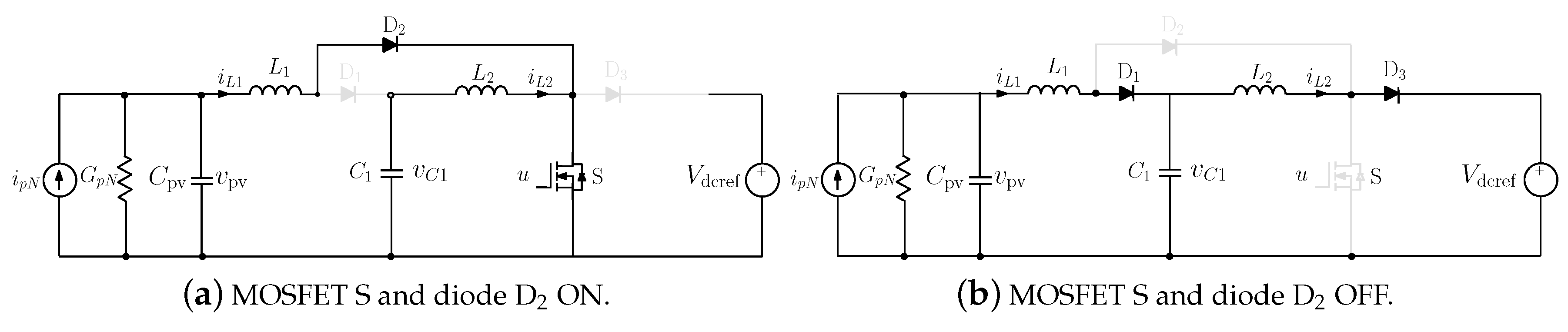
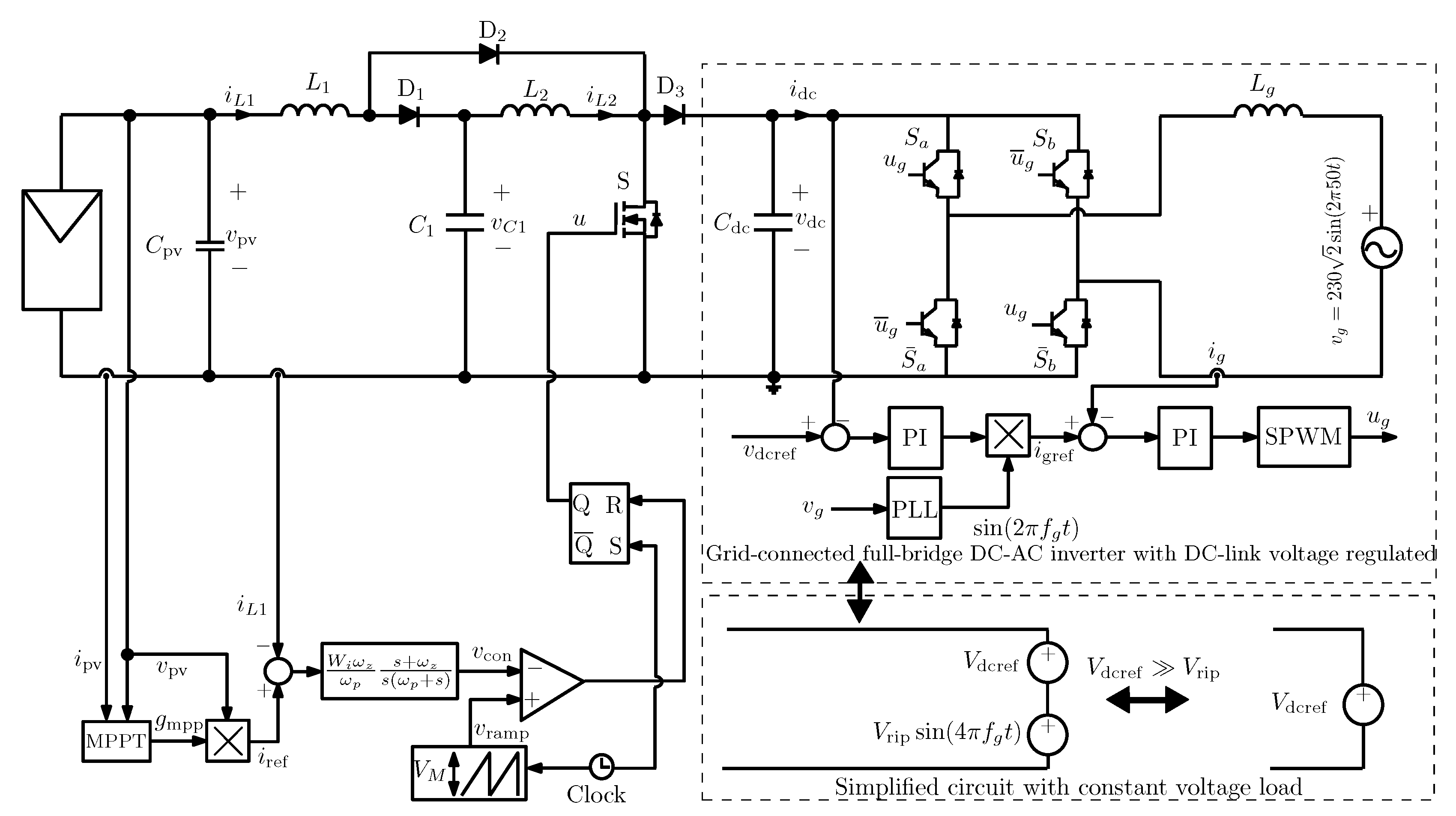
2.5. Dynamic Modeling of the Quadratic Boost Regulator Powered by a PV Generator
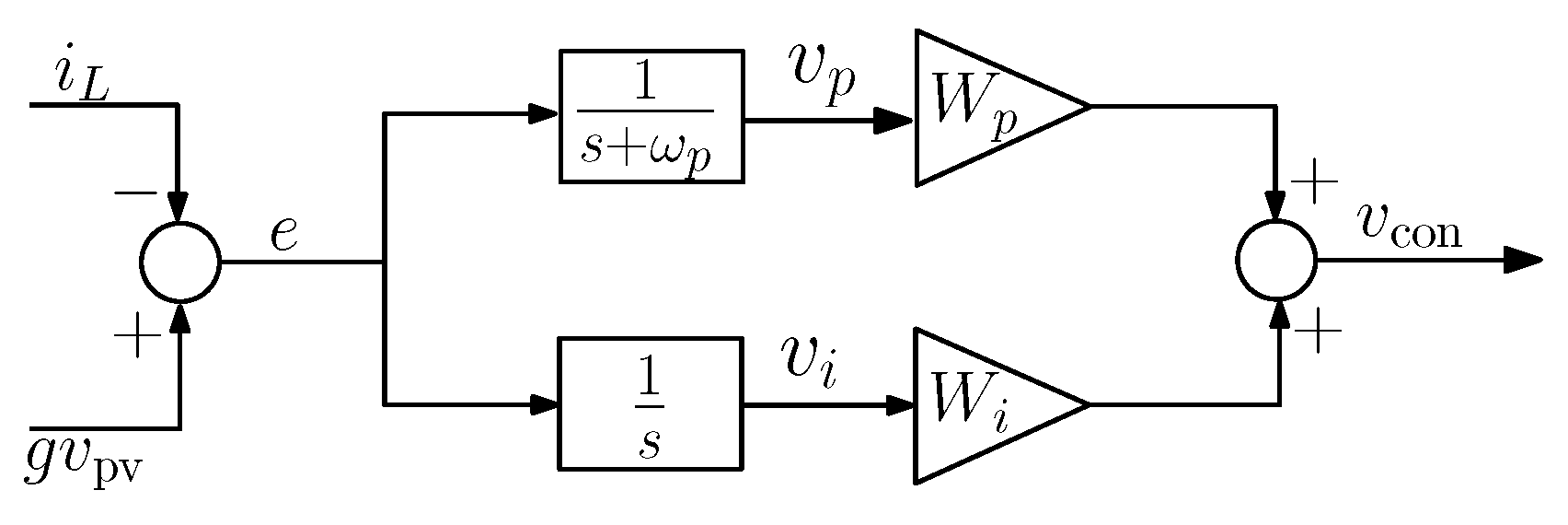
2.6. Modeling the Input Port Controller
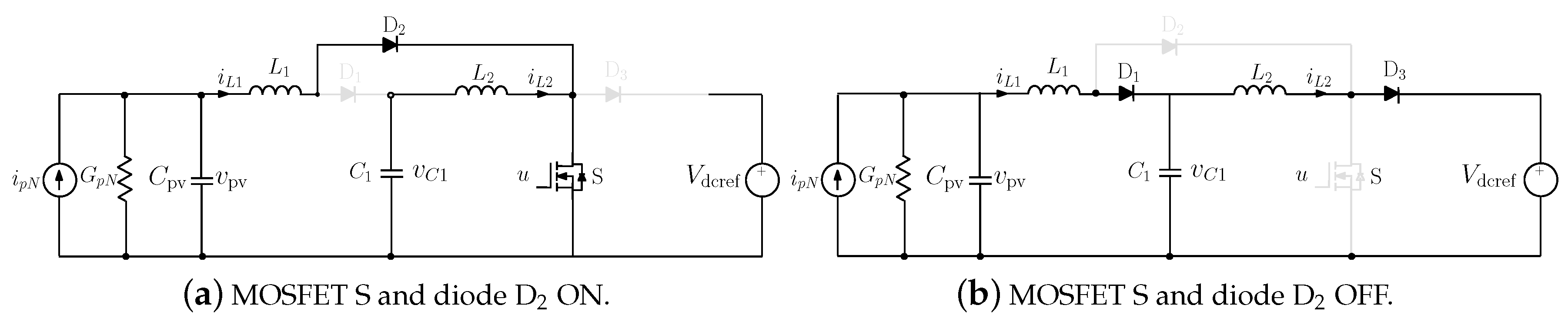
2.7. The State-Space Switched Model of the Quadratic Boost Converter
3. Small-Signal Model of the DC-DC Quadratic Boost Converter and Its Input Controller Design
4. The Complete State-Space Switched Model of the Closed-Loop Quadratic Boost Regulator
5. A Glimpse at the Solar PV System Behavior from Its Complete Mathematical Model
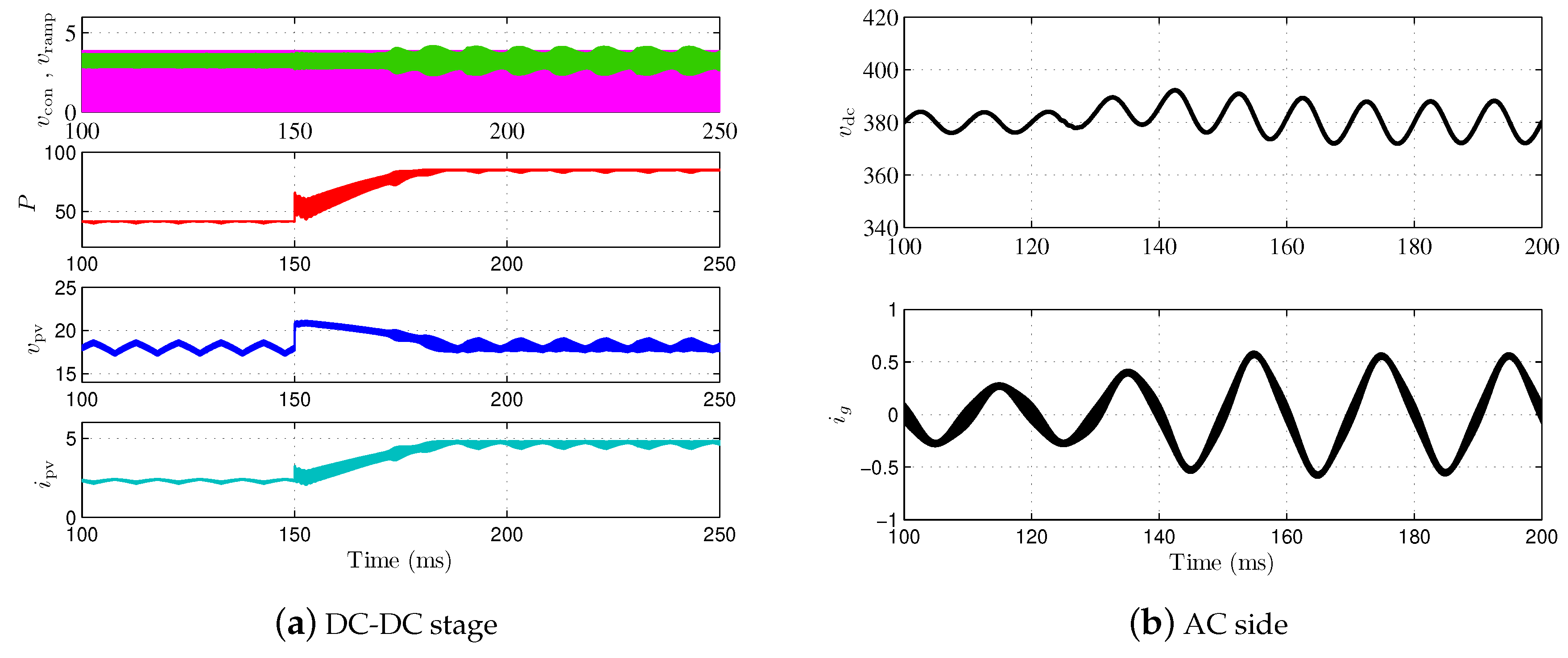
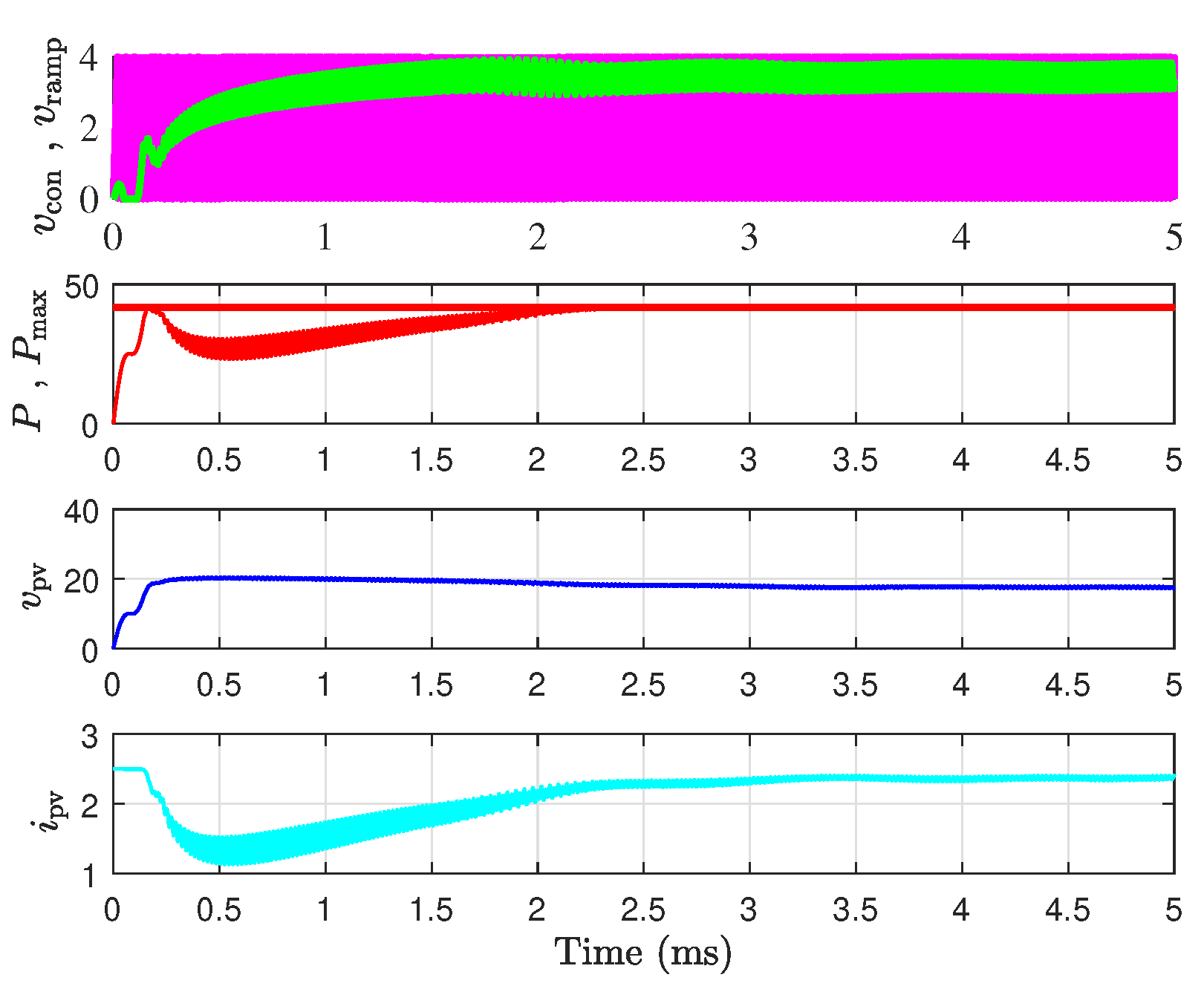
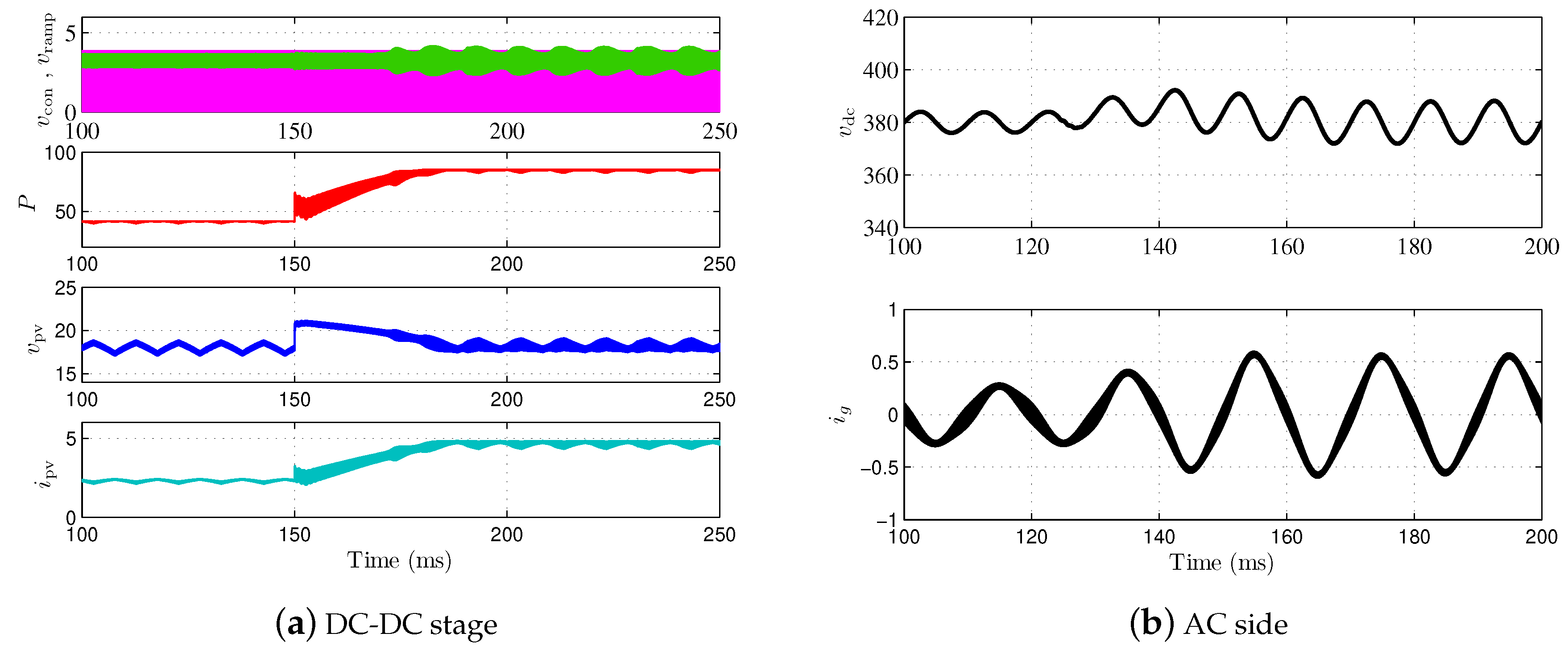
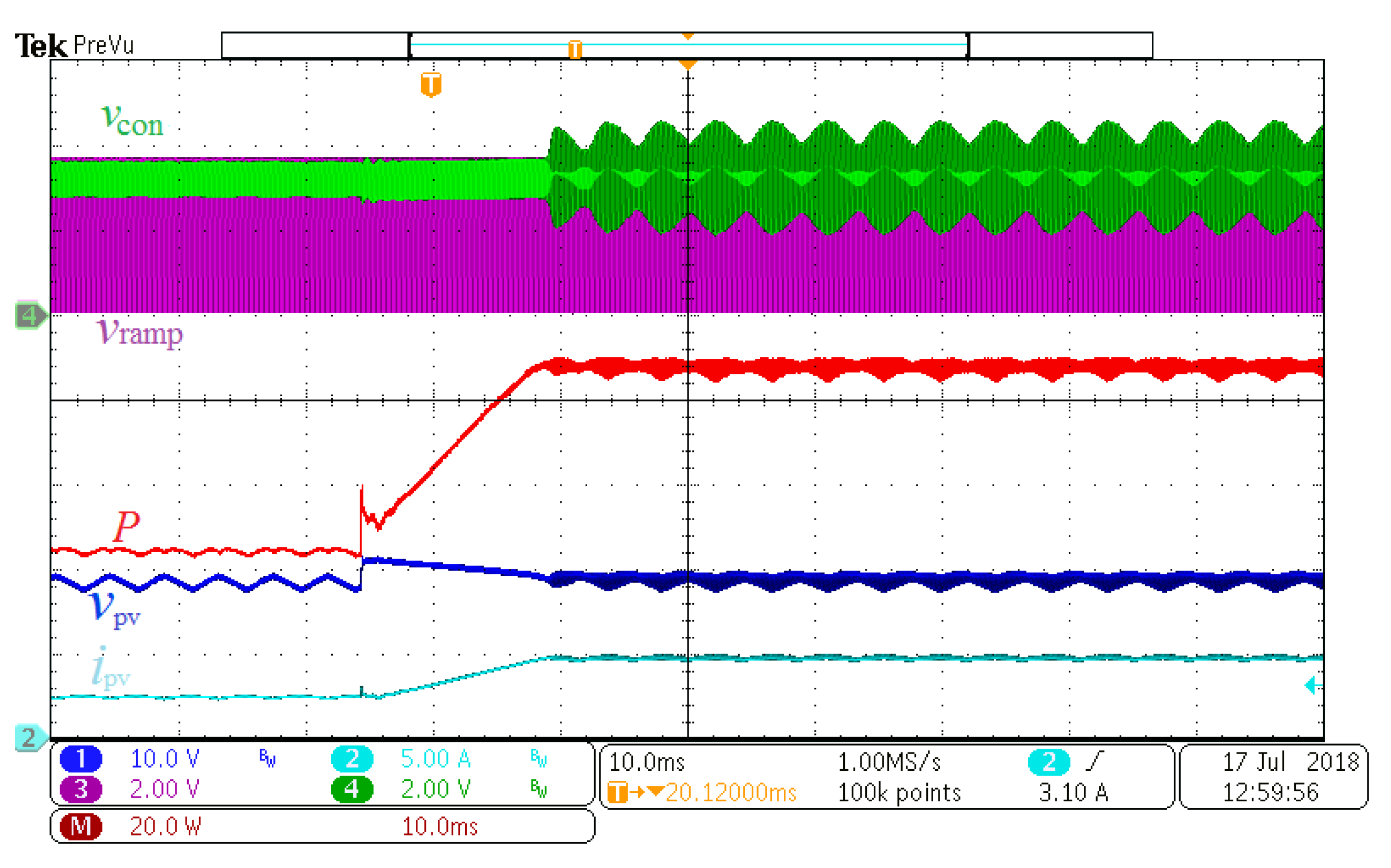
5.1. System Startup and Steady-State Response
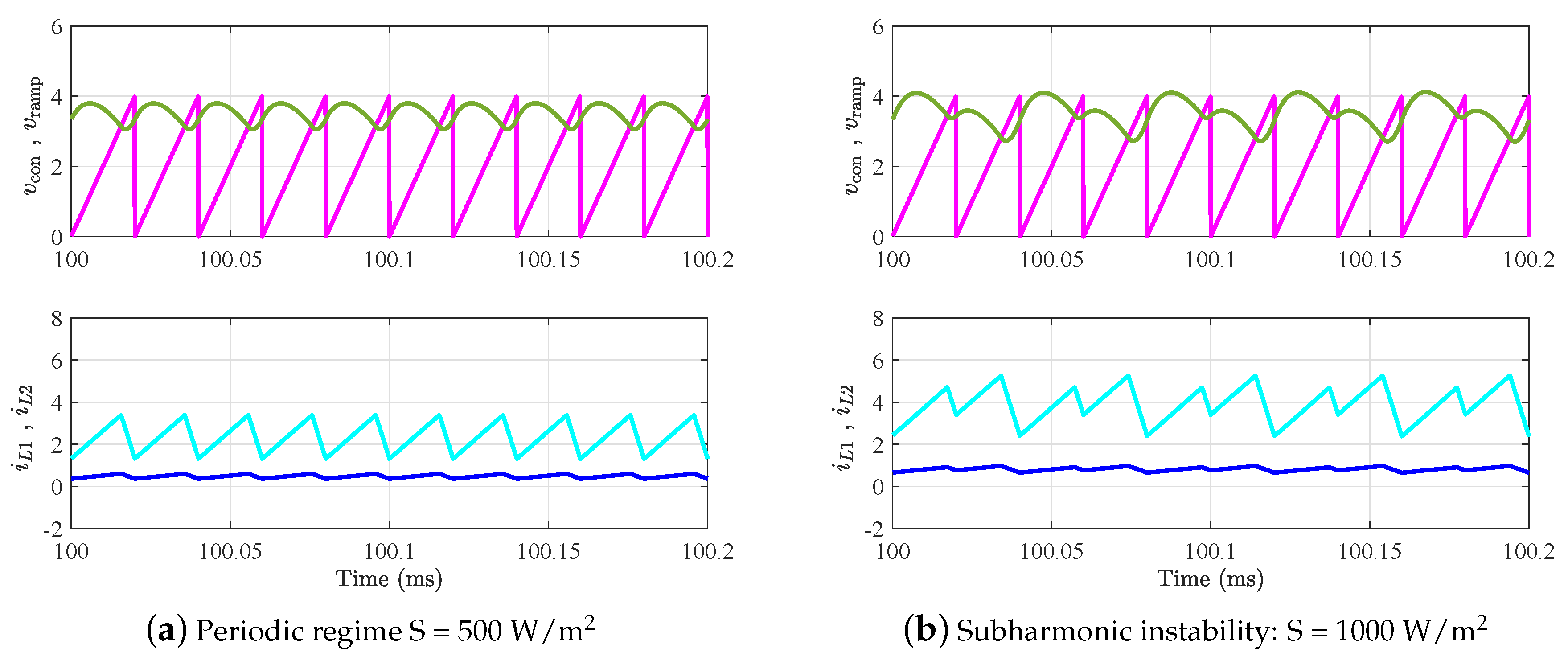
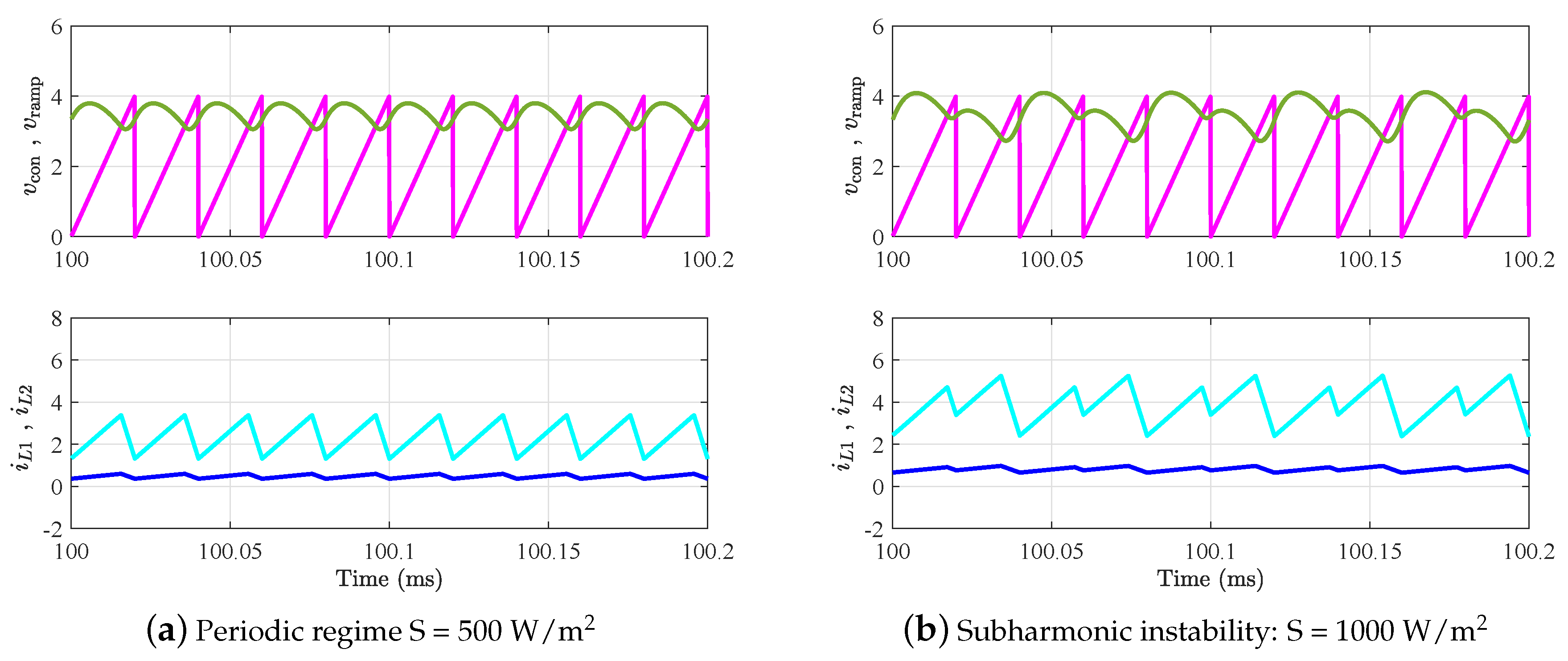
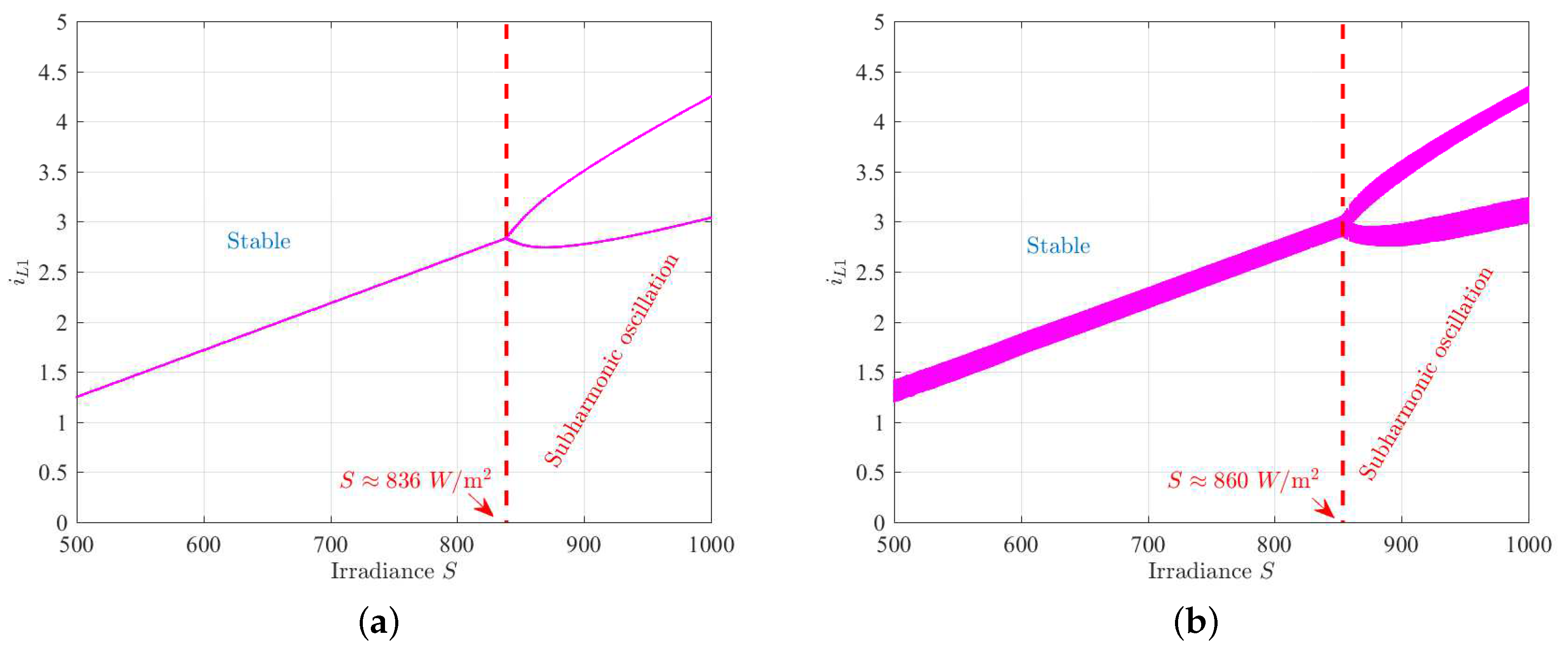
5.2. Bifurcation Diagram of the PV System by Varying the Irradiance Level
6. Stability Analysis of Periodic Orbits and Subharmonic Oscillation Boundary
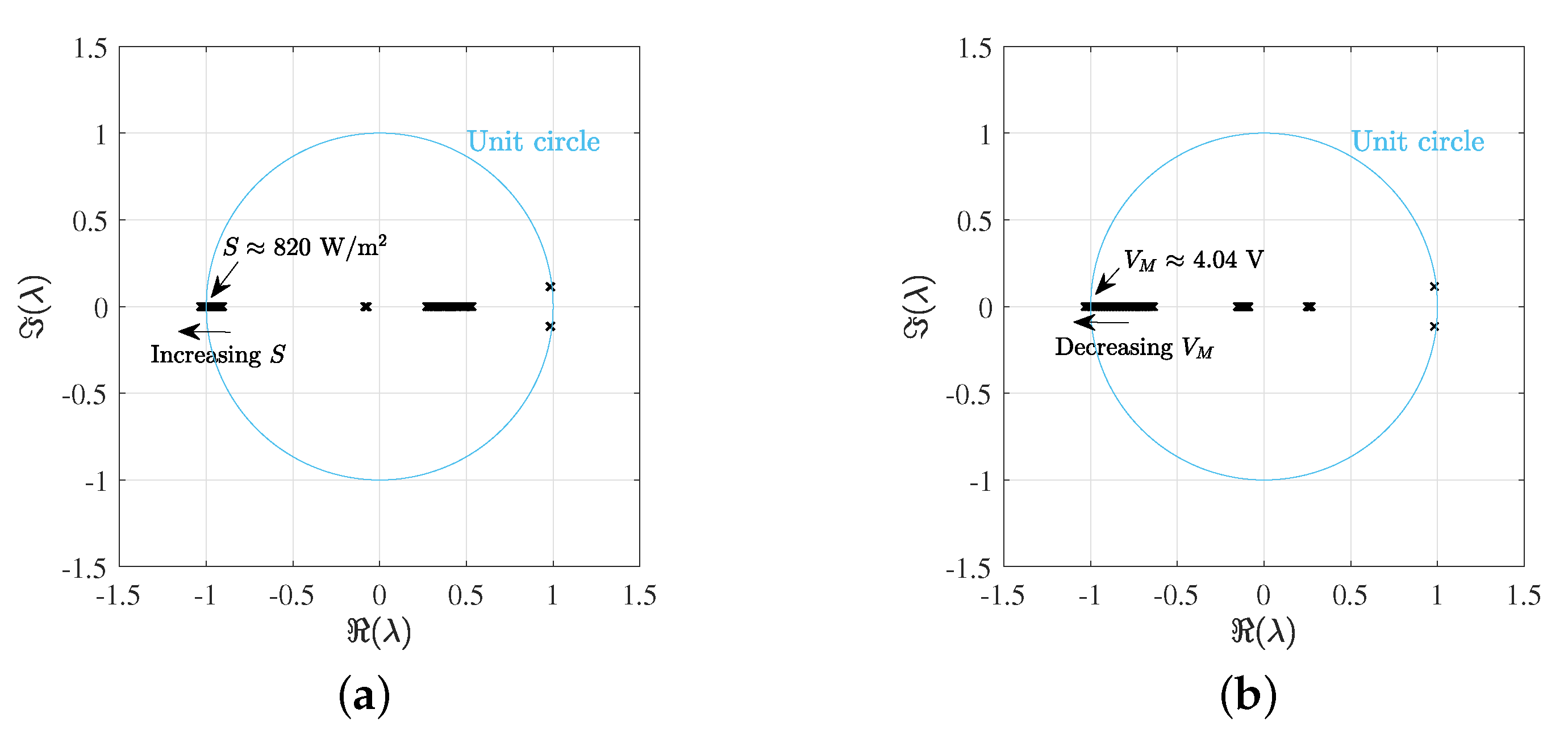
6.1. Stability Analysis of Periodic Orbits
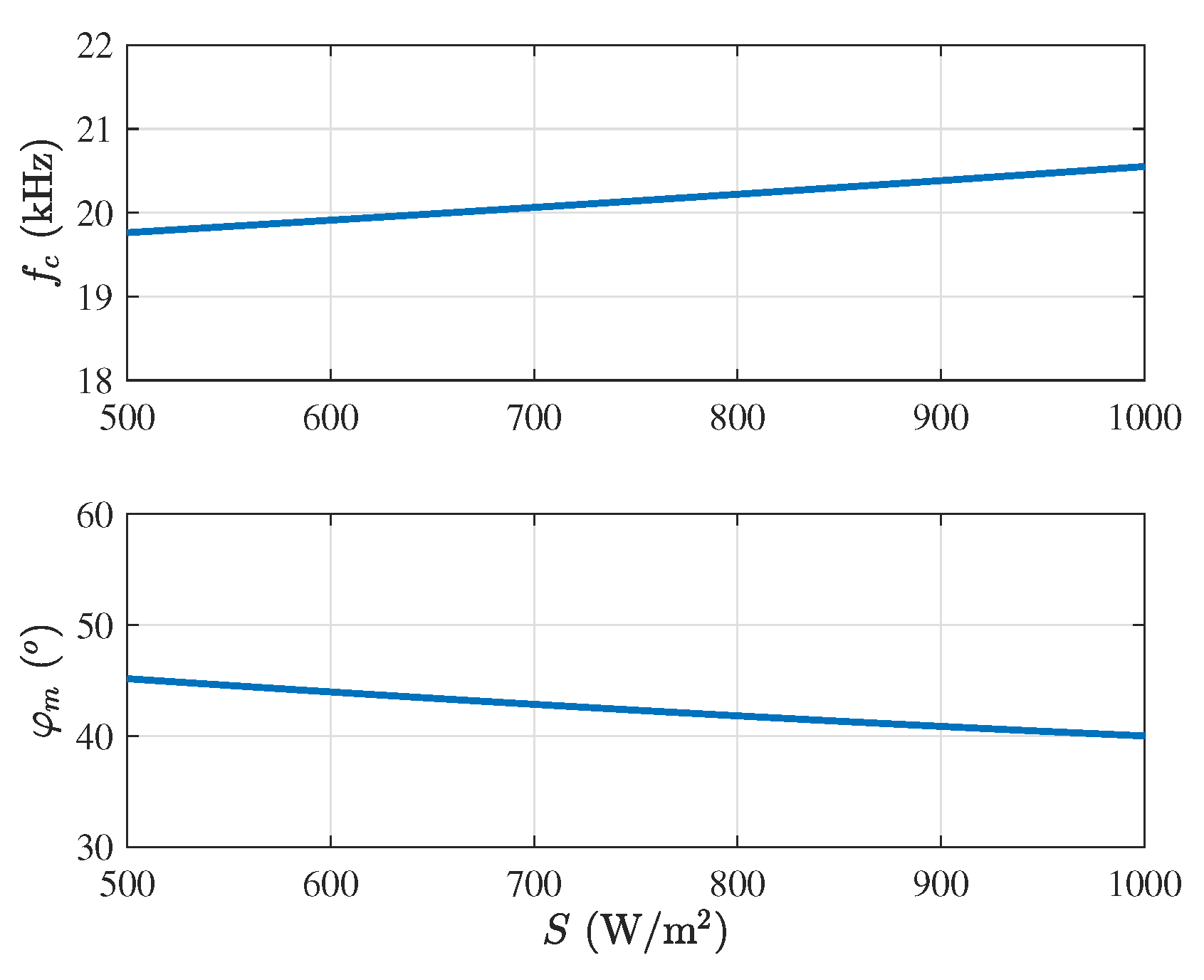
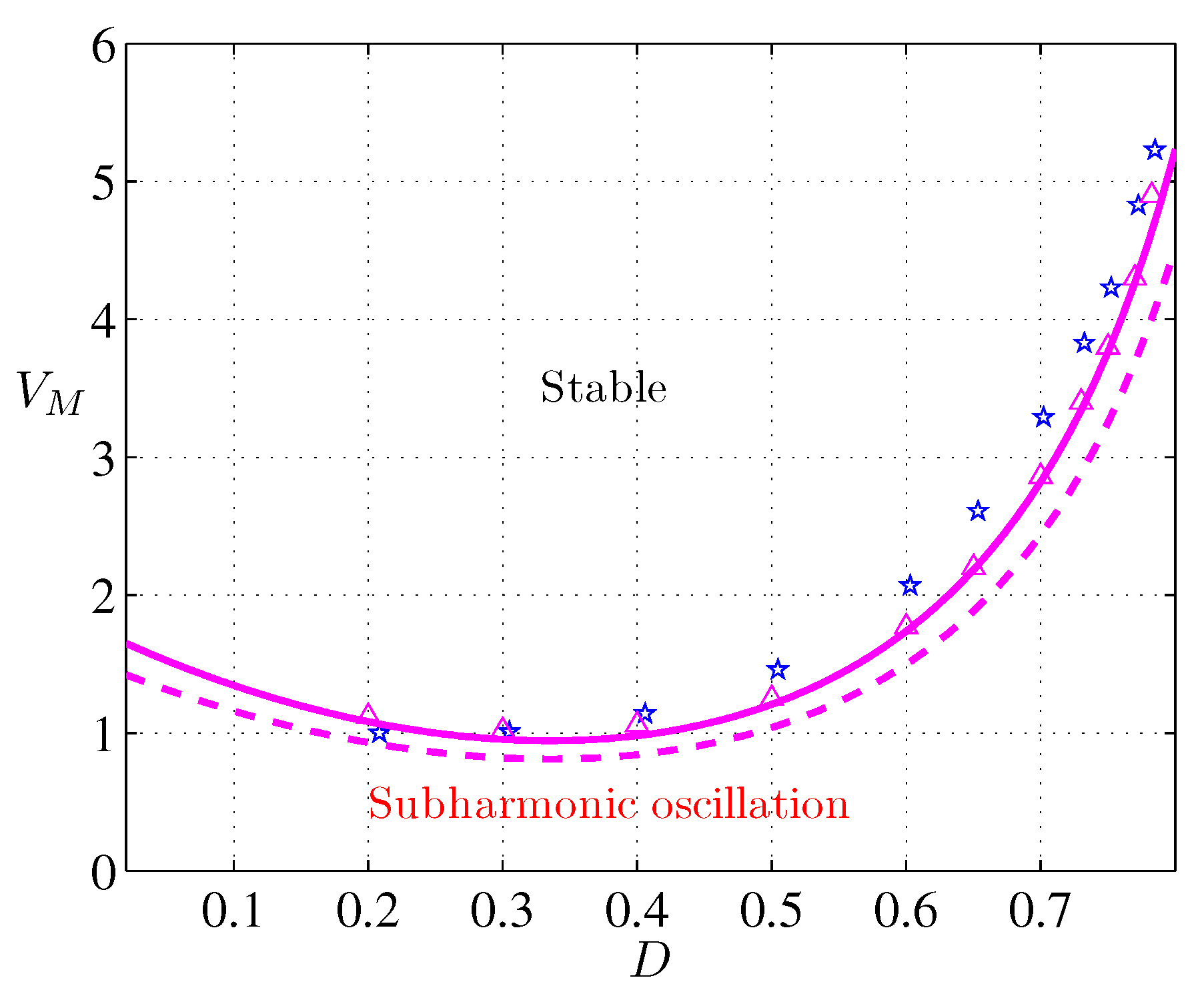
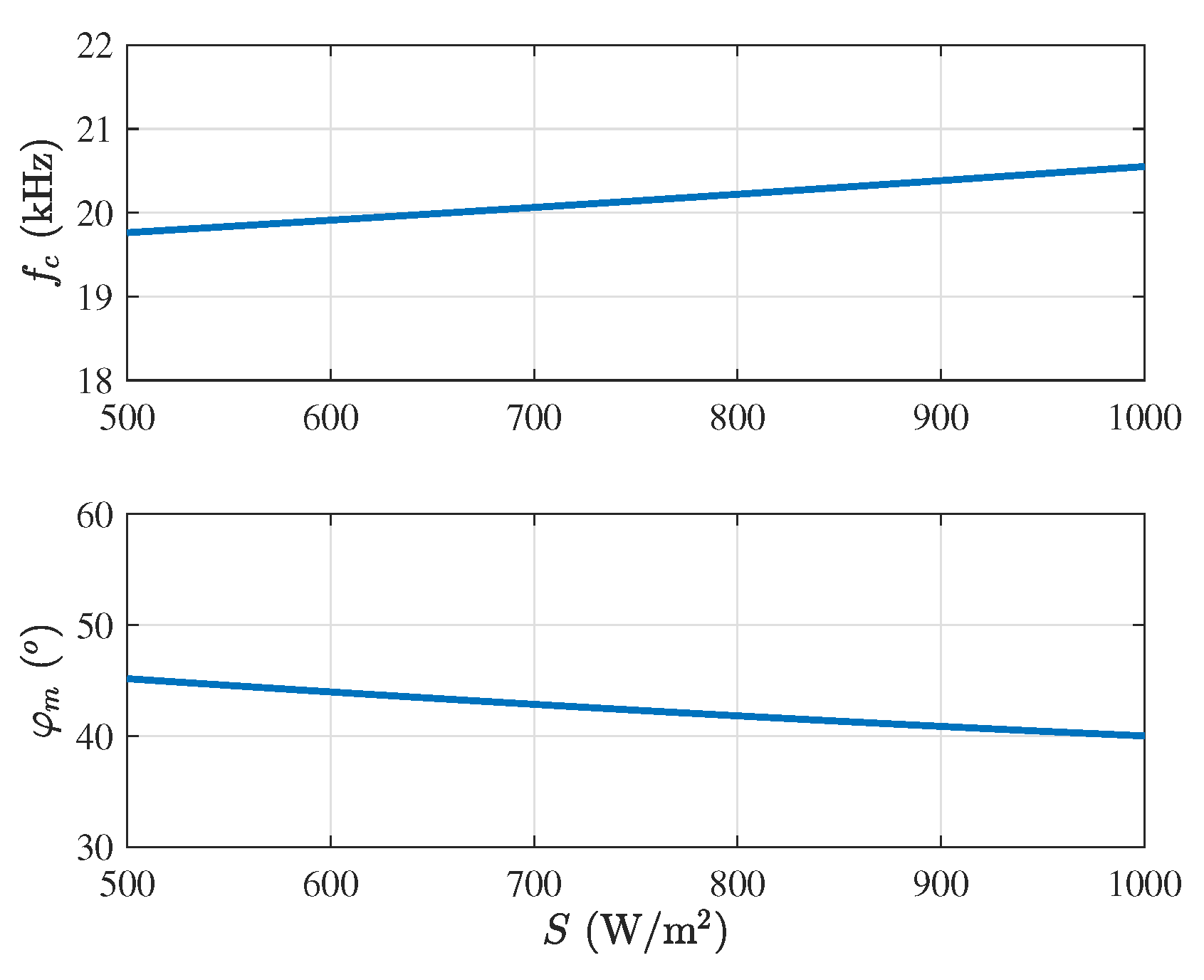
6.2. Analytical Determination of the Subharmonic Instability Boundaries
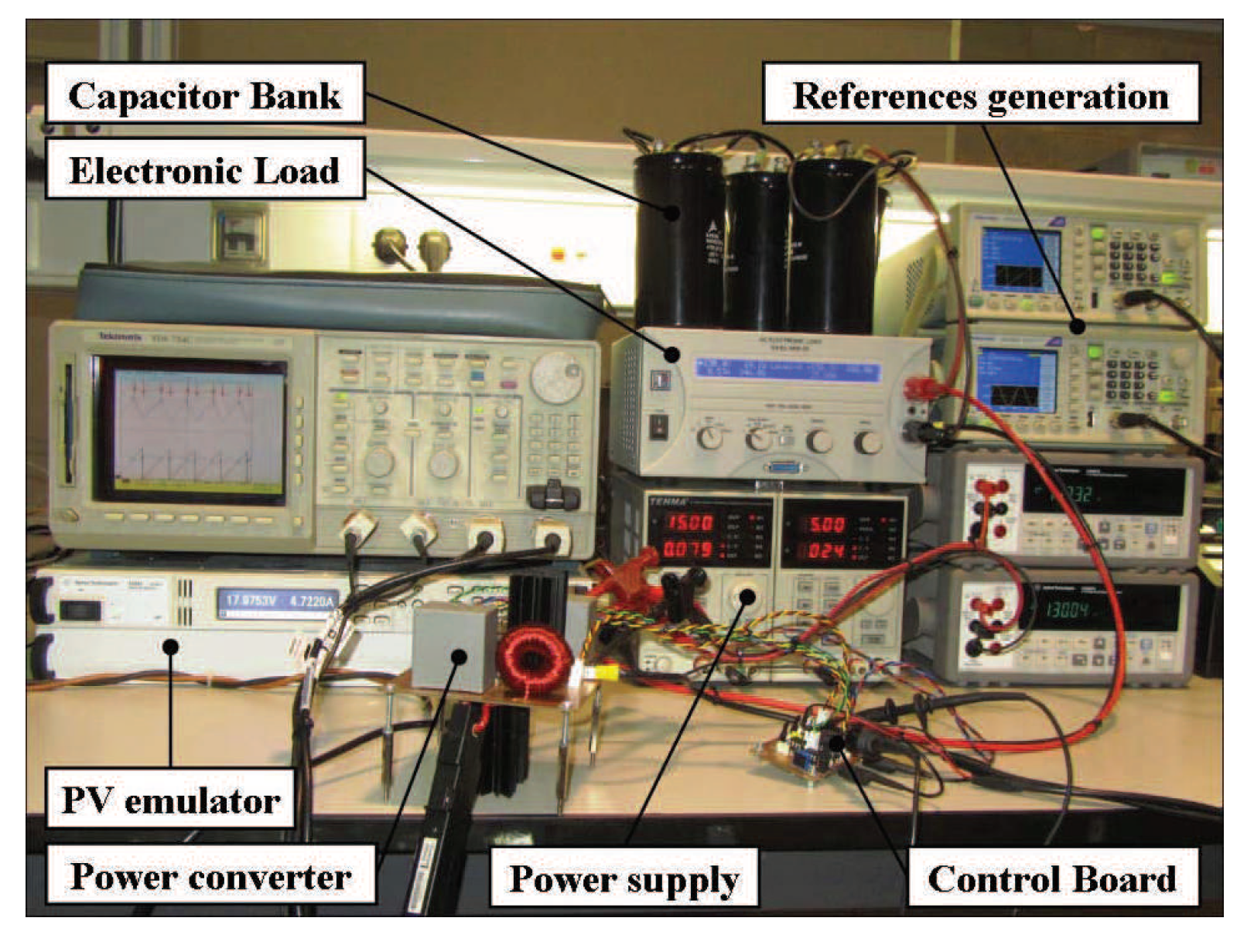
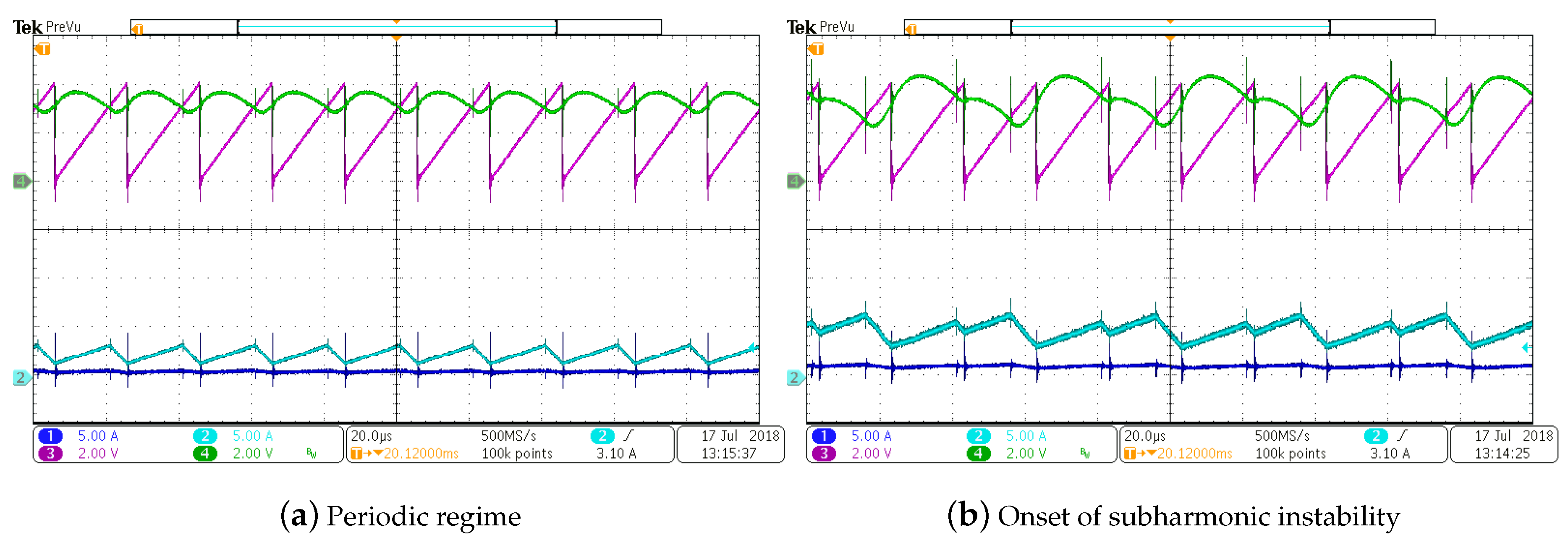
7. Validation of the Theoretical Results by Using Numerical Simulations and Experimental Results
7.1. Experimental Test 1
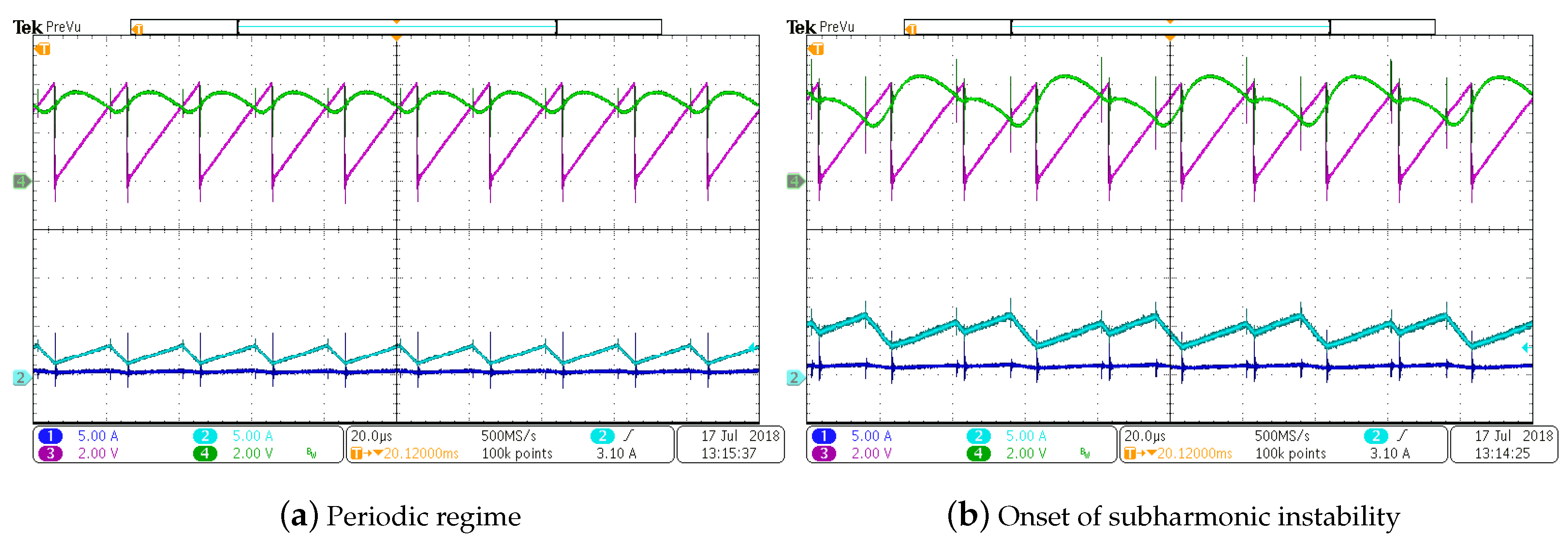
7.2. Experimental Test 2
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| PWM | Pulse width modulation |
| CCM | Continuous conduction mode |
| LFR | Loss-free-resistor |
| MPP | Maximum power point |
| MPPT | Maximum power point tracking |
| PV | Photovoltaic |
| SPWM | Sinusoidal pulse width modulation |
References
- Fahimi, B.; Kwasinski, A.; Davoudi, A.; Balog, R.S.; Kiani, M. Powering a more electrified planet. IEEE Power Energy Mag. 2011, 54–64. Available online: https://www.ieee-pes.org/images/files/pdf/2012-pe-smart-grid-compendium.pdf (accessed on 28 December 2018).
- Grubišić-Čabo, F.; Nizetić, S.; Giuseppe Marco, T. Photovoltaic panels: A review of the cooling techniques. Trans. Famena 2016, 40, 63–74. [Google Scholar]
- Erickson, R.; Maksimovic, D. Fundamentals of Power Electronics, 2nd ed.; Kluwer Academic/Plenum Publishers: New York, NY, USA, 2001. [Google Scholar]
- Alajmi, B.N.; Ahmed, K.H.; Finney, S.J.; Williams, B.W. A maximum power point tracking technique for partially shaded photovoltaic systems in microgrids. IEEE Trans. Ind. Electron. 2013, 60, 1596–1606. [Google Scholar] [CrossRef]
- Sahan, B.; Vergara, A.N.; Henze, N.; Engler, A.; Zacharias, P. A single-stage PV module integrated converter based on a low-Power current-source inverter. IEEE Trans. Ind. Electron. 2008, 55, 2602–2609. [Google Scholar] [CrossRef]
- Xiao, W. Photovoltaic Power System: Modelling, Design and Control; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Wijeratne, D.S.; Moschopoulos, G. Quadratic power conversion for power electronics: Principles and circuits. IEEE Trans. Circuits Syst. I Regul. Pap. 2012, 59, 426–438. [Google Scholar] [CrossRef]
- Lopez-Santos, O.; Martinez-Salamero, L.; Garcia, G.; Valderrama-Blavi, H.; Sierra-Polanco, T. Robust sliding-mode control design for a voltage regulated quadratic Boost Converter. IEEE Trans. Power Electron. 2015, 30, 2313–2327. [Google Scholar] [CrossRef]
- Chen, Z.; Yang, P.; Zhou, G.; Xu, J.; Chen, Z. Variable duty cycle control for quadratic boost PFC converter. IEEE Trans. Ind. Electron. 2016, 63, 4222–4232. [Google Scholar] [CrossRef]
- Langarica-Cordoba, D.; Diaz-Saldierna, L.H.; Leyva-Ramos, J. Fuel-cell energy processing using a quadratic boost converter for high conversion ratios. In Proceedings of the IEEE 6th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Aachen, Germany, 22–25 June 2015; pp. 1–7. [Google Scholar]
- Deivasundari, P.S.; Uma, G.; Poovizhi, R. Analysis and experimental verification of Hopf bifurcation in a solar photovoltaic powered hysteresis current-controlled cascaded-boost converter. IET Power Electron. 2013, 6, 763–773. [Google Scholar] [CrossRef]
- El Aroudi, A. Prediction of subharmonic oscillation in a PV-fed quadratic boost converter with nonlinear inductors. In Proceedings of the IEEE International Symposium on Circuits and Systems (ISCAS), Florence, Italy, 27–30 May 2018; pp. 1–5. [Google Scholar]
- Valderrama-Blavi, H.; Bosque, J.M.; Guinjoan, F.; Marroyo, L.; Martinez-Salamero, L. Power adaptor device for domestic DC microgrids based on commercial MPPT inverters. IEEE Trans. Ind. Electron. 2013, 60, 1191–1203. [Google Scholar] [CrossRef]
- Femia, N.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Optimization of perturb and observe maximum power point tracking method. IEEE Trans. Power Electron. 2005, 20, 963–973. [Google Scholar] [CrossRef] [Green Version]
- Banerjee, S.; Verghese, G.C. (Eds.) Nonlinear Phenomena in Power Electronics: Attractors, Bifurcations Chaos, and Nonlinear Control; IEEE Press: New York, NY, USA, 2001. [Google Scholar]
- Tse, C.K. Complex Behavior of Switching Power Converters; CRC Press: New York, NY, USA, 2003. [Google Scholar]
- Cheng, L.; Ki, W.H.; Yang, F.; Mok, P.K.T.; Jing, X. Predicting subharmonic oscillation of voltage-mode switching converters using a circuit-oriented geometrical approach. IEEE Trans. Circuits Syst. I Regul. Pap. 2017, 64, 717–730. [Google Scholar] [CrossRef]
- Lu, W.; Li, S.; Chen, W. Current-ripple compensation control technique for switching power converters. IEEE Trans. Ind. Electron. 2018, 65, 4197–4206. [Google Scholar] [CrossRef]
- Islam, H.; Mekhilef, S.; Shah, N.B.M.; Soon, T.K.; Seyedmahmousian, M.; Horan, B.; Stojcevski, A. Performance Evaluation of maximum power point tracking approaches and photovoltaic systems. Energies 2018, 11, 365. [Google Scholar] [CrossRef]
- Abusorrah, A.; Al-Hindawi, M.M.; Al-Turki, Y.; Mandal, K.; Giaouris, D.; Banerjee, S.; Voutetakis, S.; Papadopoulou, S. Stability of a boost converter fed from photovoltaic source. Sol. Energy 2013, 98, 458–471. [Google Scholar] [CrossRef]
- Al-Hindawi, M.; Abusorrah, A.; Al-Turki, Y.; Giaouris, D.; Mandal, K.; Banerjee, S. Nonlinear dynamics and bifurcation analysis of a boost converter for battery charging in photovoltaic applications. Int. J. Bifurc. Chaos 2014, 24, 1450142. [Google Scholar] [CrossRef]
- Giaouris, D.; Banerjee, S.; Zahawi, B.; Pickert, V. Stability analysis of the continuous-conduction-mode buck converter via Filippov’s method. IEEE Trans. Circuits Syst. I Regul. Pap. 2008, 55, 1084–1096. [Google Scholar] [CrossRef]
- El Aroudi, A. Out of Maximum Power Point of a PV system because of subharmonic oscillations. In Proceedings of the International Symposium on Nonlinear Theory and Its Applications, NOLTA2017, Cancún, Mexico, 4–7 December 2017. [Google Scholar]
- Lee, J.H.; Bae, H.S.; Cho, B.H. Resistive control for a photovoltaic battery charging system using a microcontroller. IEEE Trans. Ind. Electron. 2008, 55, 2767–2775. [Google Scholar] [CrossRef]
- Valencia, P.A.O.; Ramos-Paja, C.A. Sliding-mode controller for maximum power point tracking in grid-connected photovoltaic systems. Energies 2015, 8, 12363–12387. [Google Scholar] [CrossRef]
- Shmilovitz, D. On the control of photovoltaic maximum power point tracker via output parameters. IEE Proc. Electr. Power Appl. 2005, 152, 239–248. [Google Scholar] [CrossRef]
- Xiao, W.; Ozog, N.; Dunford, W.G. Topology study of photovoltaic interface for maximum power point tracking. IEEE Trans. Ind. Electron. 2007, 54, 1696–1704. [Google Scholar] [CrossRef]
- Bianconi, E.; Calvente, J.; Giral, R.; Mamarelis, E.; Petrone, G.; Ramos-Paja, G.C.A.; Spagnuolo, G.; Vitelli, M.M. A fast current-based MPPT technique employing sliding mode control. IEEE Trans. Ind. Electron. 2012, 60, 1168–1178. [Google Scholar] [CrossRef]
- Huang, L.; Qiu, D.; Xie, F.; Chen, Y.; Zhang, B. Modeling and stability analysis of a single-phase two-stage grid-connected photovoltaic system. Energies 2017, 10, 2176. [Google Scholar] [CrossRef]
- Rodrigues, E.M.G.; Godina, R.; Marzband, M.; Pouresmaeil, E. Simulation and Comparison of Mathematical Models of PV Cells with Growing Levels of Complexity. Energies 2018, 11, 2902. [Google Scholar] [CrossRef]
- Villalva, M.; Gazoli, J.; Filho, E. Comprehensive approach to modeling and simulation of photovoltaic arrays. IEEE Trans. Power Electron. 2009, 24, 1198–1208. [Google Scholar] [CrossRef]
- BP Solar BP585 Datasheet. Available online: http://www.electricsystems.co.nz/documents/BPSolar85w.pdf (accessed on 19 December 2018).
- Krein, P.T.; Balog, R.S.; Mirjafari, M. Minimum energy and capacitance requirements for single-phase inverters and rectifiers using a ripple port. IEEE Trans. Power Electron. 2012, 27, 4690–4698. [Google Scholar] [CrossRef]
- El Aroudi, A. A new approach for accurate prediction of subharmonic oscillation in switching regulators— Part II: Case studies. IEEE Trans. Power Electron. 2017, 32, 5835–5849. [Google Scholar] [CrossRef]
- El Aroudi, A. A new approach for accurate prediction of Subharmonic oscillation in switching regulators— Part I: Mathematical derivations. IEEE Trans. Power Electron. 2017, 32, 5651–5665. [Google Scholar] [CrossRef]
- Xiao, W.; Dunford, W.G.; Palmer, P.R.; Capel, A. Regulation of photovoltaic voltage. IEEE Trans. Ind. Electron. 2007, 54, 1365–1374. [Google Scholar] [CrossRef]
- Al-Turki, Y.; El Aroudi, A.; Mandal, K.; Giaouris, D.; Abusorrah, A.; Al Hindawi, M.; Banerjee, S. Nonaveraged control-oriented modeling and relative stability analysis of DC-DC switching converters. Int. J. Circuit Theory Appl. 2018, 46, 565–580. [Google Scholar] [CrossRef]
- Haroun, R.; El Aroudi, A.; Cid-Pastor, A.; Garcia, G.; Olalla, C.; Martinez-Salamero, L. Impedance matching in photovoltaic systems using cascaded boost converters and sliding-mode control. IEEE Trans. Power Electron. 2015, 30, 3185–3199. [Google Scholar] [CrossRef]
- Leyva, R.; Alonso, C.; Queinnec, I.; Cid-Pastor, A.; Lagrange, D.; Martinez-Salamero, L. MPPT of photovoltaic systems using extremum-seeking control. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 249–258. [Google Scholar] [CrossRef]
- Zhou, Y.; Tse, C.K.; Qiu, S.S.; Lau, F.C.M. Applying resonant parametric perturbation to control chaos in the buck DC/DC converter with phase shift and frequency mismatch considerations. Int. J. Bifurc. Chaos Appl. Sci. Eng. 2003, 13, 3459–3471. [Google Scholar] [CrossRef]
- Di Capua, G.; Femia, N. A novel method to predict the real operation of ferrite inductors with moderate saturation in switching power supplies applications. IEEE Trans. Power Electron. 2016, 31, 2456–2464. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Number of cells | 36 |
| Standard light intensity | 1000 / |
| Ref temperature | 25 C |
| Series resistance | 0.005 |
| Parallel resistance | 1000 |
| Short circuit current | |
| Saturation current | 1.16 |
| Band energy | 1.12 |
| Ideality factor A | 1.2 |
| Temperature coefficient | C |
| Parameter | Value |
|---|---|
| Inductance | 20 mH |
| DC-link capacitance | 47 F |
| Grid frequency | 50 Hz |
| PWM switching frequency | 50 kHz |
| RMS value of the grid voltage | 230 V |
| Proportional gain (current) | 1 |
| Integral gain (current) | 20 krad/s |
| Cut-off frequency of the filter (current controller) | 50 Hz |
| Proportional gain (voltage) | 0.019 |
| Integral gain (voltage) | 0.51 rad/s |
| (H) | (mH) | , , () | (V) | (V) | (V) | , , (krad/s) | (kHz) |
|---|---|---|---|---|---|---|---|
| 120–138 | 3.5–5.5 | 10, 10, 47 | variable | 230 | 380 | 50, 1, 1 | 50 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
El Aroudi, A.; Al-Numay, M.; Garcia, G.; Al Hossani, K.; Al Sayari, N.; Cid-Pastor, A. Analysis of Nonlinear Dynamics of a Quadratic Boost Converter Used for Maximum Power Point Tracking in a Grid-Interlinked PV System. Energies 2019, 12, 61. https://doi.org/10.3390/en12010061
El Aroudi A, Al-Numay M, Garcia G, Al Hossani K, Al Sayari N, Cid-Pastor A. Analysis of Nonlinear Dynamics of a Quadratic Boost Converter Used for Maximum Power Point Tracking in a Grid-Interlinked PV System. Energies. 2019; 12(1):61. https://doi.org/10.3390/en12010061
Chicago/Turabian StyleEl Aroudi, Abdelali, Mohamed Al-Numay, Germain Garcia, Khalifa Al Hossani, Naji Al Sayari, and Angel Cid-Pastor. 2019. "Analysis of Nonlinear Dynamics of a Quadratic Boost Converter Used for Maximum Power Point Tracking in a Grid-Interlinked PV System" Energies 12, no. 1: 61. https://doi.org/10.3390/en12010061