Prediction of Metallic Conductor Voltage Owing to Electromagnetic Coupling Via a Hybrid ANFIS and Backtracking Search Algorithm


 ,
,
Abstract
:1. Introduction
2. Literate Review
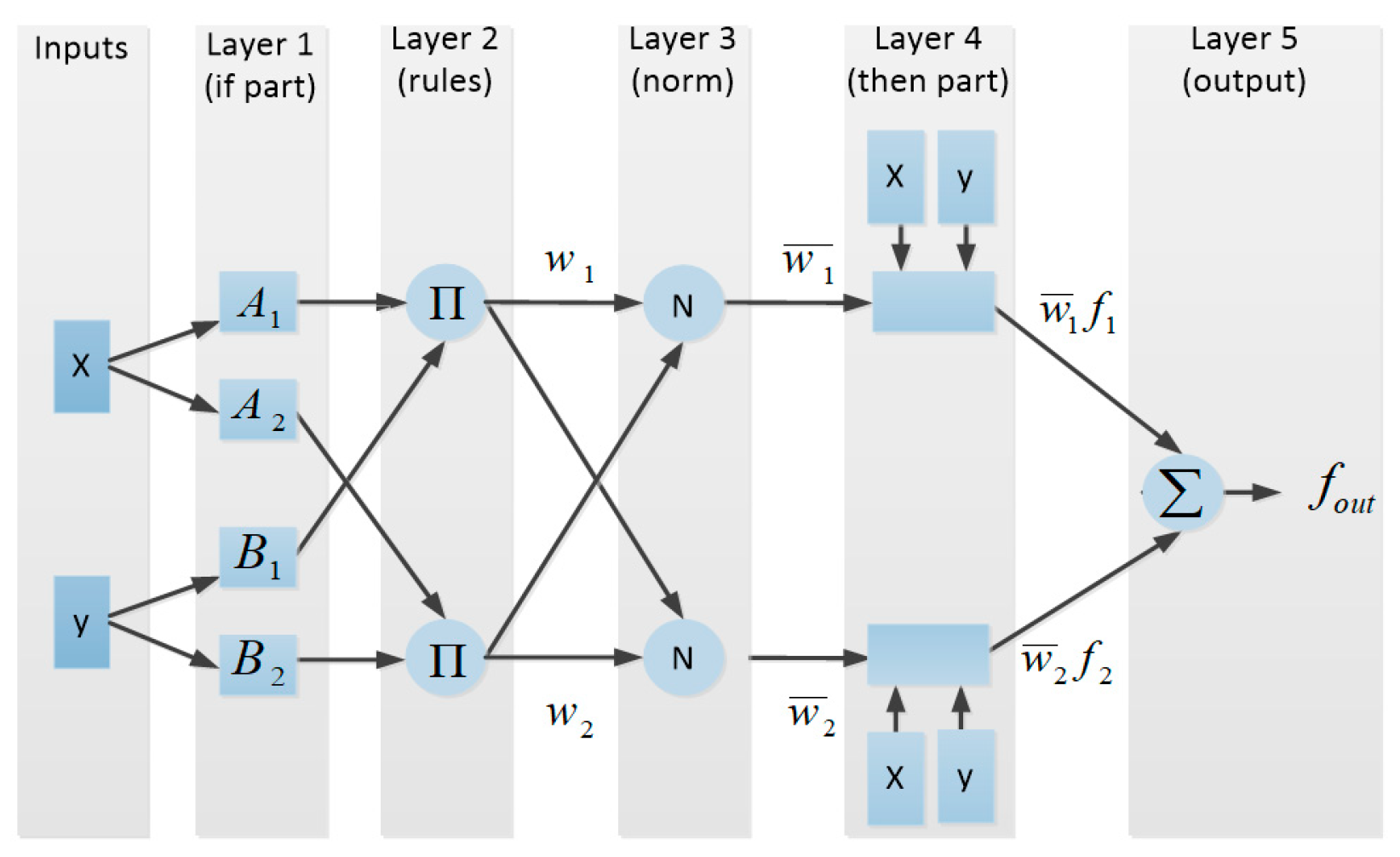
3. Adaptive Neuro-Fuzzy Inference System (ANFIS)
Rule 2: If x is A2 and y is B2 then z is f2(x, y; p2, q2, r2) = x p2 + y q2 + r2
Rule2: If x is A2 and y is B2 then z=f2(x, y; p2, q2, r2)
4. Backtracking Search Algorithm (BSA)
| Step 1: Initialization Scattering the population members in the solution space (Equation (11)) | nPop is population size. nVar signifies the optimization variable. Uniform distribution function is U. lowj and upj are upper and lower search space limits of jth variable. yi is productivity of ith individual. g is generation number. |
Step 2: Selection-I
| a and b are randomly generated numbers. permuting (oldP) is a random shuffling function. |
| Step 3: Mutation. The Wiener process (F) is implemented to control the amplitude of the search matrix according to Equation (15); | N is standard normal distribution |
| Step 4: Crossover. Determine the binary integer–valued matrix (map) and control parameter of individuals in BSA according to Equation (16); | |
| Step 5: Boundary control. At the end of step 4, if an individual in generated offspring (T) violates the boundary condition, the control mechanism developed in step 5 is updated according to Equation (17); | T is generated offspring |
| Step 6: Selection-II. Calculating the fitness and the position (Equation (18)). |
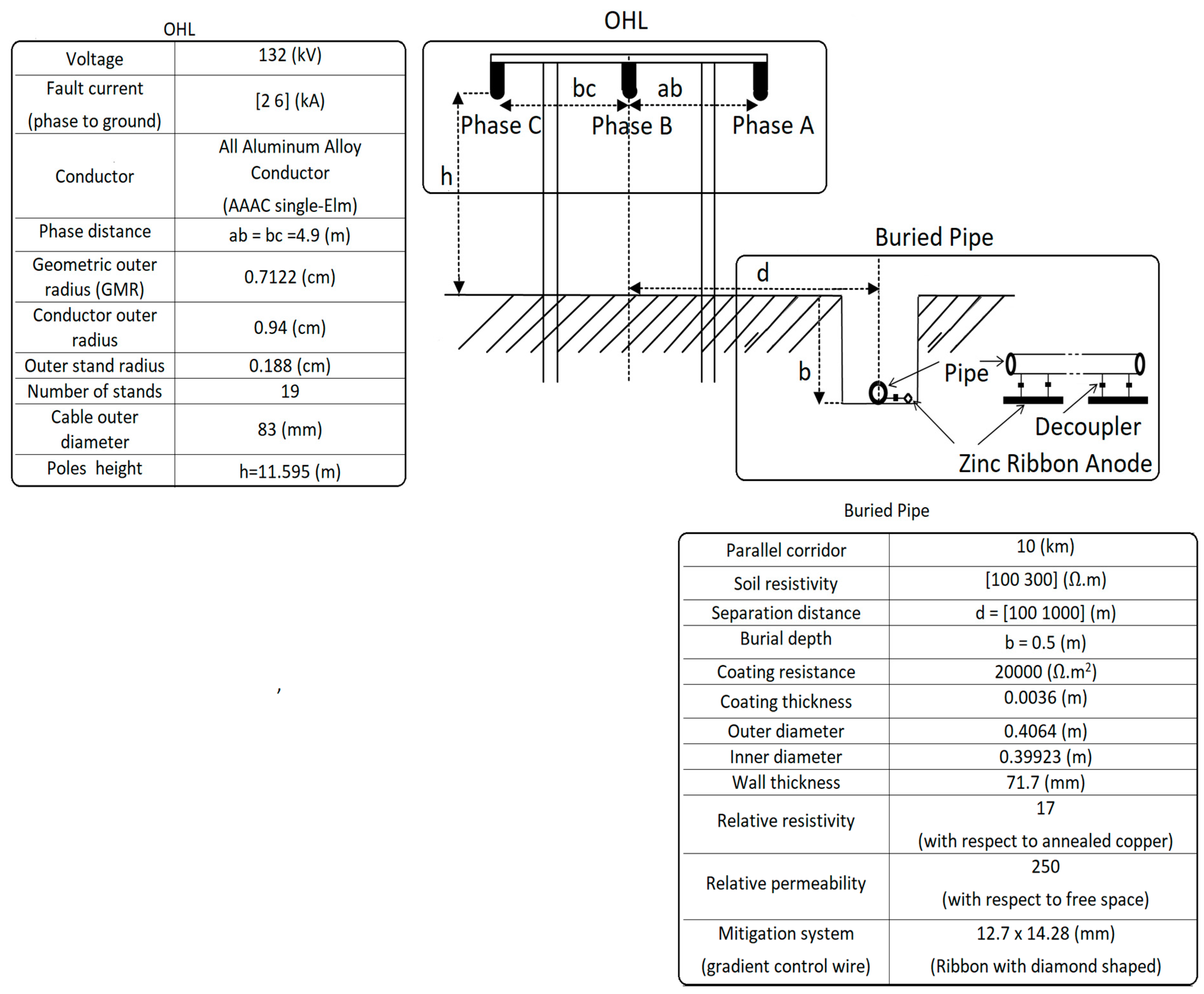
5. System Modeling
6. Simulation Results and Discussion
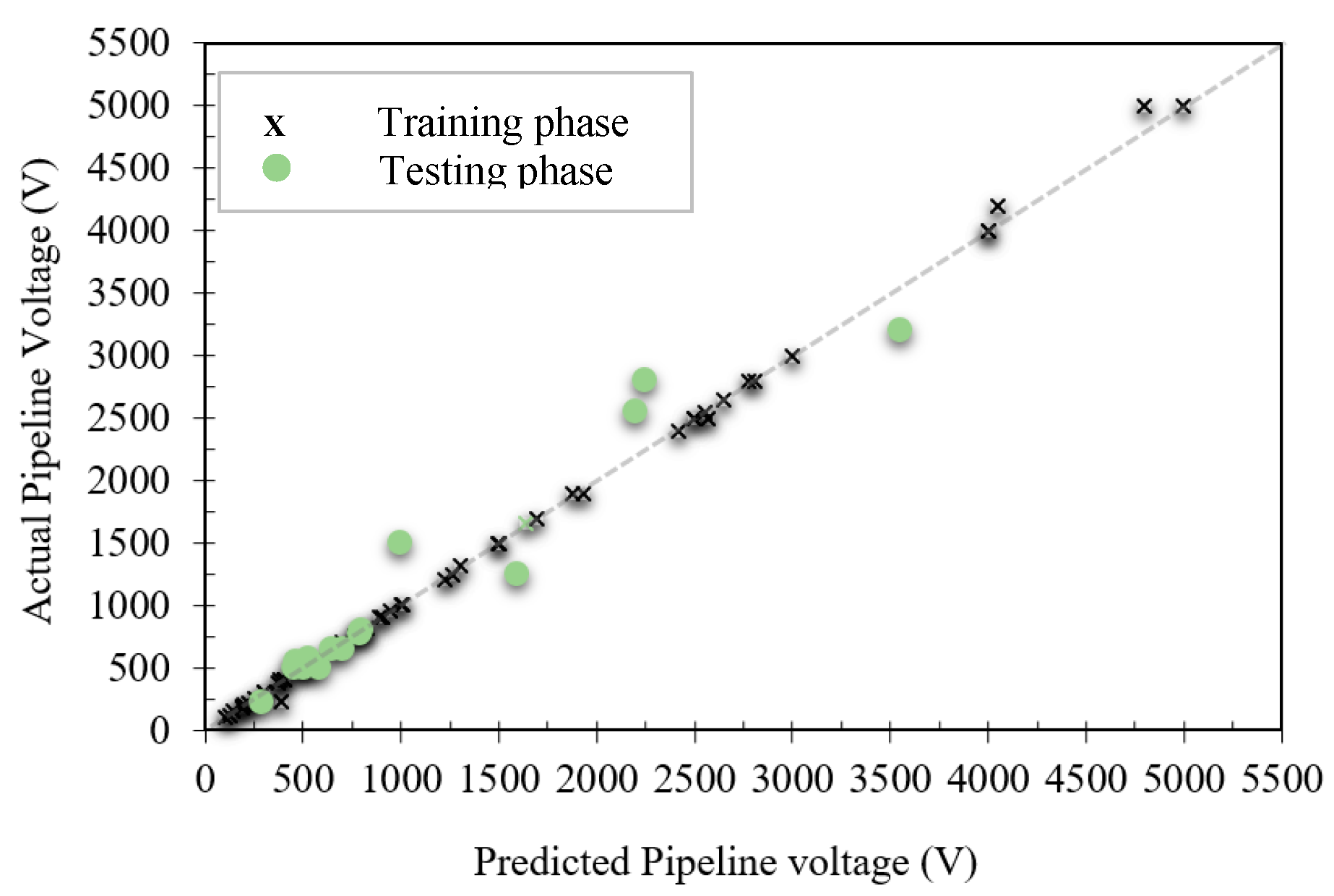
- The independent variables consisted of four inputs representing fault current, soil resistivity, separation distance, and mitigation system, while the dependent variable represented the total pipeline’s maximum voltage.
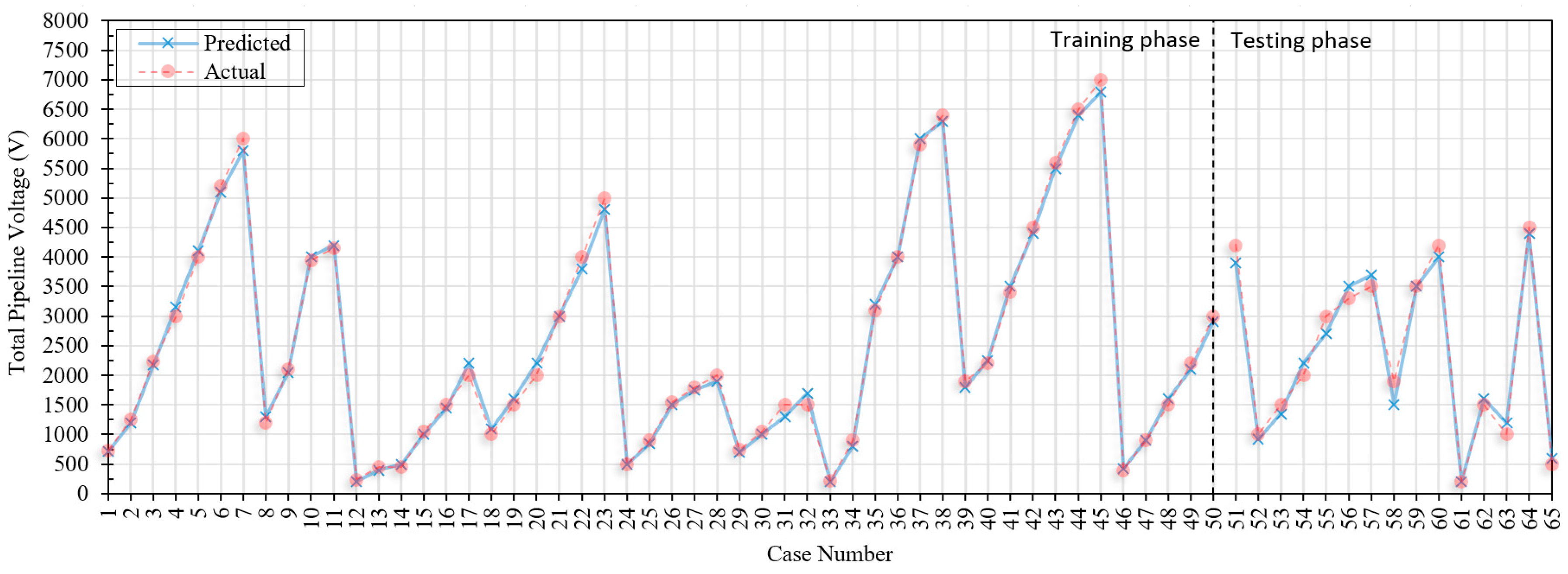
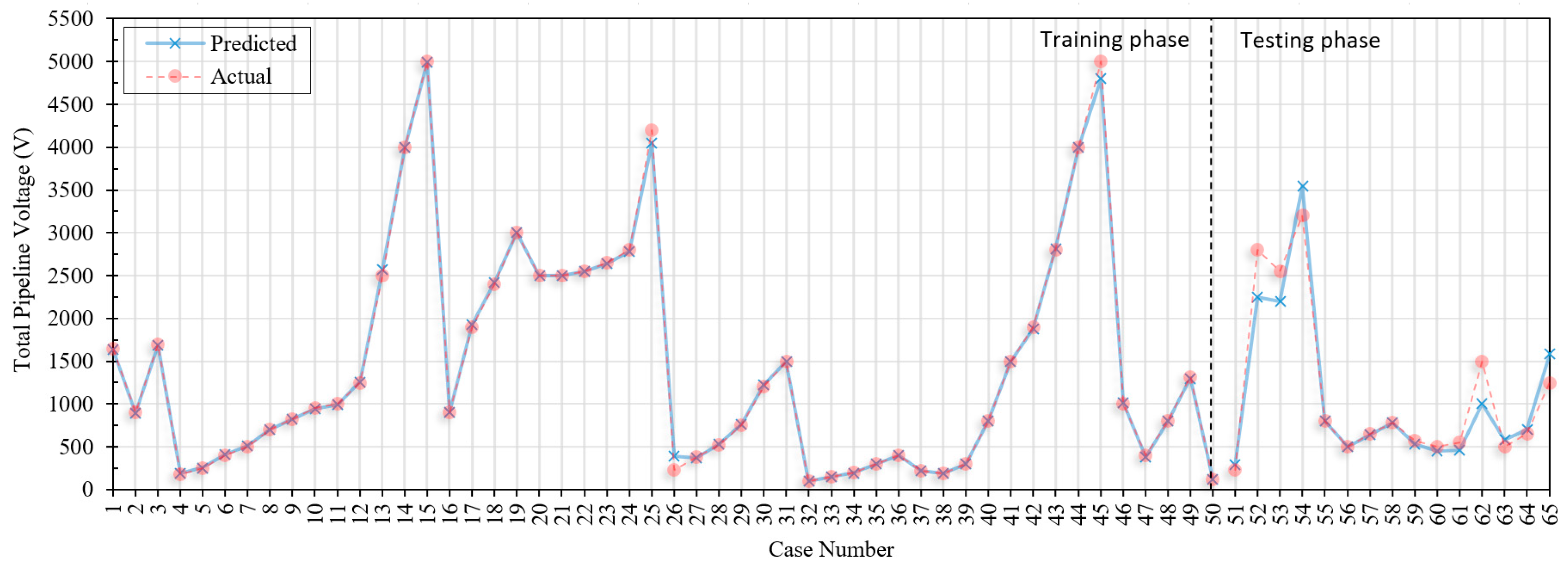
- Both dependent and independent variables were randomly distributed into two different phases: fifty of the total sixty-five systems with different configurations as the training phase, and the reminder as the testing phase. Since the range of dependent and independent variables varies widely, both variables were normalized by Equation (19). To speed up the learning process, the observed data were normalized prior to data processing. The main purpose of raw data normalization was unifying the observed data into a common scale.where Z is the data to be normalized and is the normalized data, and t is the number of observations.
- The learning process occurred during the training phase. The computer programs that link the input variables to the output were developed during learning process. The data required for the training of the AI-based methods was obtained via the CDEGS program. This program is especially designed to automate and simplify the modeling of complex RoW arrangements involving power transmission lines and other utilities, such as water, oil, or gas pipelines. Its results were strongly validated by analytical equations and by an experimental test rig reported in [8,36].Although the testing phase does not have any role in developing the models, it was employed to assess the performance of the models obtained by AI-based methods. To measure the predictive accuracy of the generated models, several evaluation criteria were used, such as Thiel’s inequality coefficient (U-statistic), root mean square error (RMSE), absolute error, and mean absolute percentage error (MAPE). The mathematical equations of those criteria are as follows:where the U-statistic provides a measure of how well fitted a time series of predicted values to a corresponding time series of observed data. The U-statistic is always in the range of zero to one, with a value closer to one indicating the estimation is no better than a naive estimate and the value closer to zero demonstrates higher prediction accuracy with a great fit.
- The Durbin–Watson (whiteness) test was calculated to guarantee that the generated models sufficiently describe given data sets [37]. The whiteness test is calculated via a confirmatory analysis. The main purpose of confirmation analysis is to guarantee the whiteness of estimated residuals. The whiteness of estimated residuals (e(t)) indicates that they are uncorrelated. The residuals autocorrelation function (RACF) is used to study the correlation of the whiteness of estimated residuals through the following equation:
- There is a strong correlation between the observed data and the predicted values if the generated model provides 0.8 < | R |.
- There is a moderate correlation between the observed data and the predicted values if the generated model provides 0.8 > | R | > 0.2.
- There is a weak correlation between the observed data and the predicted values if the generated model provides 0.2 > | R |.
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Czumbil, L.; Micu, D.; Ceclan, A. Artificial Intelligence Techniques Applied to Electromagnetic Interference Problems. In Proceedings of the International Conference on Advancements of Medicine and Health Care through Technology, Cluj-Napoca, Romania, 23–26 September 2009; pp. 339–344. [Google Scholar]
- Antunes, C.L.; Micu, D.D.; Czumbil, L.; Christoforidis, G.C.; Ceclan, A.; Şteţ, D. Evaluation of induced AC voltages in underground metallic pipeline. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2012, 31, 1133–1143. [Google Scholar]
- Ismail, H.M. Effect of oil pipelines existing in an HVTL corridor on the electric-field distribution. IEEE Trans. Power Deliv. 2007, 22, 2466–2472. [Google Scholar] [CrossRef]
- Lucca, G. Different approaches in calculating AC inductive interference from power lines on pipelines. IET Sci. Meas. Technol. 2018, 12, 802–806. [Google Scholar] [CrossRef]
- Lu, M.; Zhu, W.; Yin, L.; Peyton, A.J.; Yin, W.; Qu, Z. Reducing the lift-off effect on permeability measurement for magnetic plates from multifrequency induction data. IEEE Trans. Instrum. Meas. 2017, 67, 167–174. [Google Scholar] [CrossRef]
- Qi, L.; Yuan, H.; Li, L.; Cui, X. Calculation of interference voltage on the nearby underground metal pipeline due to the grounding fault on overhead transmission lines. IEEE Trans. Electromagn. Compat. 2013, 55, 965–974. [Google Scholar] [CrossRef]
- Micu, D.D.; Christoforidis, G.C.; Czumbil, L. AC interference on pipelines due to double circuit power lines: A detailed study. Electr. Power Syst. Res. 2013, 103, 1–8. [Google Scholar] [CrossRef]
- Al-Badi, A.; Al-Rizzo, H. Simulation of electromagnetic coupling on pipelines close to overhead transmission lines: A parametric study. J. Commun. Softw. Syst. 2005, 1. [Google Scholar] [CrossRef]
- Lu, M.; Xie, Y.; Zhu, W.; Peyton, A.J.; Yin, W. Determination of the magnetic permeability, electrical conductivity, and thickness of ferrite metallic plates using a multi-frequency electromagnetic sensing system. IEEE Trans. Ind. Inform. 2018, 15, 4111–4119. [Google Scholar] [CrossRef]
- Charalambous, C.A.; Demetriou, A.; Lazari, A.L.; Nikolaidis, A.I. Effects of Electromagnetic Interference on Underground Pipelines caused by the Operation of High Voltage AC Traction Systems: The Impact of Harmonics. IEEE Trans. Power Deliv. 2018, 33, 2664–2672. [Google Scholar] [CrossRef]
- Guo, Y.B.; Liu, C.; Wang, D.G.; Liu, S.H. Effects of alternating current interference on corrosion of X60 pipeline steel. Pet. Sci. 2015, 12, 316–324. [Google Scholar] [CrossRef] [Green Version]
- Yu, Z.; Liu, L.; Wang, Z.; Li, M.; Wang, X. Evaluation of the Interference Effects of HVDC Grounding Current on a Buried Pipeline. IEEE Trans. Appl. Supercond. 2019, 29, 1–5. [Google Scholar] [CrossRef]
- Southey, R.; Dawalibi, F.; Vukonich, W. Recent advances in the mitigation of AC voltages occurring in pipelines located close to electric transmission lines. IEEE Trans. Power Deliv. 1994, 9, 1090–1097. [Google Scholar] [CrossRef]
- Djekidel, R.; Bessedik, S.A.; Spiteri, P.; Mahi, D. Passive mitigation for magnetic coupling between HV power line and aerial pipeline using PSO algorithms optimization. Electr. Power Syst. Res. 2018, 165, 18–26. [Google Scholar] [CrossRef] [Green Version]
- Youwen, J.; Wuxi, B.; Kaizhi, C.; Meng, L.; Jun, Z. Mitigating Pipeline AC Interference Using Numerical Modeling and Continuous AC Voltage Monitoring. In Proceedings of the CORROSION 2018, Phoenix, AZ, USA, 15–19 April 2018. [Google Scholar]
- Popoli, A.; Sandrolini, L.; Cristofolini, A. A quasi-3D approach for the assessment of induced AC interference on buried metallic pipelines. Int. J. Electr. Power Energy Syst. 2019, 106, 538–545. [Google Scholar] [CrossRef]
- Czumbil, L.; Micu, D.D.; Stet, D.; Ceclan, A. A neural network approach for the inductive coupling between overhead power lines and nearby metallic pipelines. In Proceedings of the 2016 International Symposium on Fundamentals of Electrical Engineering (ISFEE), Bucharest, Romania, 30 June–2 July 2016; pp. 1–6. [Google Scholar]
- Micu, D.D.; Lingvay, I.; Lingvay, C.; Cret, L.; Simion, E. Numerical evaluation of induced voltages in the metallic underground pipelines. Rev. Roum. Sci. Tech. Ser. Electrotech. Energetique 2009, 54, 175–183. [Google Scholar]
- Milešević, B. Electromagnetic Influence of Electric Railway System on Metallic Structures; Fakultet elektrotehnike i računarstva, Sveučilište u Zagrebu: Zagreb, Croatia, 2014. [Google Scholar]
- Micu, D.D.; Czumbil, L.; Christoforidis, G.; Ceclan, A. Layer recurrent neural network solution for an electromagnetic interference problem. IEEE Trans. Magn. 2011, 47, 1410–1413. [Google Scholar] [CrossRef]
- Pourdaryaei, A.; Mokhlis, H.; Illias, H.A.; Kaboli, S.H.A.; Ahmad, S. Short-Term Electricity Price Forecasting via Hybrid Backtracking Search Algorithm and ANFIS Approach. IEEE Access 2019, 7, 77674–77691. [Google Scholar] [CrossRef]
- Micu, D.D.; Czumbil, L.; Christoforidis, G.; Simion, E. Neural networks applied in electromagnetic interference problems. Rev. Roum. Sci. Tech. Ser. Electrotech. Energetique 2012, 57, 162–171. [Google Scholar]
- Czumbil, L.; Micu, D.D.; Şteţ, D.; Ceclan, A. INDUCTIVE COUPLING BETWEEN OVERHEAD POWER LINES AND NEARBY METALLIC PIPELINES. A NEURAL NETWORK APPROACH. Carpathian J. Electr. Eng. 2015, 9, 29–43. [Google Scholar]
- Al-Badi, A.; Ellithy, K.; Al-Alawi, S. Prediction of Voltages on Mitigated Pipelines Paralleling Electric Transmission Lines Using an Arificial Neural Network. J. Corros. Sci. Eng. 2007, 10, 24–28. [Google Scholar]
- Al-Badi, A.; Ellithy, K.; Al-Alawi, S. Prediction of Voltages on Mitigated Pipelines Paralleling Electric Transmission Lines Using Ann. Int. J. Comput. Appl. 2010, 32, 15–22. [Google Scholar]
- Al-Badi, A.; Ghania, S.M.; El-Saadany, E.F. Prediction of metallic conductor voltage owing to electromagnetic coupling using neuro fuzzy modeling. IEEE Trans. Power Deliv. 2008, 24, 319–327. [Google Scholar] [CrossRef]
- Satsios, K.J.; Labridis, D.P.; Dokopoulos, P.S. An artificial intelligence system for a complex electromagnetic field problem. II. Method implementation and performance analysis. IEEE Trans. Magn. 2000, 35, 523–527. [Google Scholar] [CrossRef]
- Ghelardoni, L.; Ghio, A.; Anguita, D. Energy load forecasting using empirical mode decomposition and support vector regression. IEEE Trans. Smart Grid 2013, 4, 549–556. [Google Scholar] [CrossRef]
- Kaboli, S.H.A.; Fallahpour, A.; Selvaraj, J.; Rahim, N. Long-term electrical energy consumption formulating and forecasting via optimized gene expression programming. Energy 2017, 126, 144–164. [Google Scholar] [CrossRef]
- Damousis, I.G.; Satsios, K.; Labridis, D.; Dokopoulos, P. Combined fuzzy logic and genetic algorithm techniques—Application to an electromagnetic field problem. Fuzzy Sets Syst. 2002, 129, 371–386. [Google Scholar] [CrossRef]
- Civicioglu, P. Backtracking search optimization algorithm for numerical optimization problems. Appl. Math. Comput. 2013, 219, 8121–8144. [Google Scholar] [CrossRef]
- Lee, C.H.; Chang, C.N.; Jiang, J.A. Evaluation of ground potential rises in a commercial building during a direct lightning stroke using CDEGS. IEEE Trans. Ind. Appl. 2015, 51, 4882–4888. [Google Scholar] [CrossRef]
- Jang, J.S. ANFIS: Adaptive-network-based fuzzy inference system. IEEE Trans. Syst. Man Cybern. 1993, 23, 665–685. [Google Scholar] [CrossRef]
- Abbasi, M.R.; Shamiri, A.; Hussain, M.A.; Kaboli, S.H.A. Dynamic process modeling and hybrid intelligent control of ethylene copolymerization in gas phase catalytic fluidized bed reactors. J. Chem. Technol. Biotechnol. 2019, 94, 2433–2451. [Google Scholar] [CrossRef]
- Svalina, I.; Galzina, V.; Lujić, R.; ŠImunović, G. An adaptive network-based fuzzy inference system (ANFIS) for the forecasting: The case of close price indices. Expert Syst. Appl. 2013, 40, 6055–6063. [Google Scholar] [CrossRef]
- Al-Badi, A.; Metwally, I. Induced voltages on pipelines installed in corridors of AC power lines. Electr. Power Compon. Syst. 2006, 34, 671–679. [Google Scholar] [CrossRef]
- AlRashidi, M.; El-Naggar, K. Long term electric load forecasting based on particle swarm optimization. Appl. Energy 2010, 87, 320–326. [Google Scholar] [CrossRef]
- Le, L.T.; Nguyen, H.; Dou, J.; Zhou, J. A Comparative Study of PSO-ANN, GA-ANN, ICA-ANN, and ABC-ANN in Estimating the Heating Load of Buildings’ Energy Efficiency for Smart City Planning. Appl. Sci. 2019, 9, 2630. [Google Scholar] [CrossRef]
- Bessedik, S.A.; Djekidel, R.; Ameur, A. Performance of different kernel functions for LS-SVM-GWO to estimate flashover voltage of polluted insulators. IET Sci. Meas. Technol. 2018, 12, 739–745. [Google Scholar] [CrossRef]
- Mostafavi, E.S.; Mousavi, S.M.; Hosseinpour, F. Gene Expression Programming as a Basis for New Generation of Electricity Demand Prediction Models. Comput. Ind. Eng. 2014, 74, 120–128. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Parameters | Value | |
|---|---|---|---|
| ANN | MLP | Hidden layer Transfer function Learning algorithm | 1 logarithmic sigmoid Levenberg-Marquardt PB |
| SVR | RBF kernel | Kernel’s parameter (∂) Soft margin parameter (C) Fraction of error (ʋ) | 1/6 1 0.5 |
| ANFIS | Subtractive clustering (SC) | Cluster radius | 0.8 |
| FIS structure | Sugeno-type | ||
| Membership function | Gaussian | ||
| Metaheuristic optimization | PSO | Swarm population w c1=c2 | 100 [0.4, 0.9] 2 |
| CSA | Number of nests Distribution factor (ß) Probability of an alien egg (Pa) | 100 1.5 [0, 1] | |
| BSA | Number of individuals | 100 | |
| Control parameter rate (P) | 100% | ||
| Methods | Performance Indexes | MAPE (%) | RMSE | Absolute Error | U-Statistic | RACF |
|---|---|---|---|---|---|---|
| MLP | Training | 1.2836 | 0.0365 | 0.9328 | 0.0091 | 0.0007 |
| Testing | 1.9627 | 0.0559 | 0.7432 | 0.0154 | 0.0003 | |
| Whole set | 1.5017 | 0.0462 | 1.6760 | 0.0110 | 0.0006 | |
| MLP-PSO | Training | 1.2377 | 0.0343 | 0.9172 | 0.0088 | 0.0004 |
| Testing | 1.8974 | 0.0532 | 0.7232 | 0.0152 | 0.0022 | |
| Whole set | 1.4534 | 0.0435 | 1.6404 | 0.0106 | 0.0014 | |
| MLP-CSA | Training | 1.2034 | 0.0314 | 0.8973 | 0.0087 | 0.0043 |
| Testing | 1.8879 | 0.0522 | 0.7189 | 0.0150 | 0.0019 | |
| Whole set | 1.4179 | 0.0399 | 1.6162 | 0.0104 | 0.0035 | |
| MLP-BSA | Training | 1.1835 | 0.2845 | 0.8875 | 0.0086 | 0.0008 |
| Testing | 1.8661 | 0.5043 | 0.6959 | 0.0149 | 0.0035 | |
| Whole set | 1.3979 | 0.0377 | 1.5834 | 0.0102 | 0.0021 | |
| SVR | Training | 1.3045 | 0.0397 | 0.9520 | 0.0097 | 0.0032 |
| Testing | 1.9903 | 0.0599 | 0.7736 | 0.0158 | 0.0045 | |
| Whole set | 1.6273 | 0.0483 | 1.7256 | 0.0114 | 0.0038 | |
| SVR-PSO | Training | 1.1194 | 0.0264 | 0.8614 | 0.0084 | 0.0035 |
| Testing | 1.7287 | 0.0471 | 0.6567 | 0.0151 | 0.0007 | |
| Whole set | 1.3586 | 0.0352 | 1.5181 | 0.0098 | 0.0025 | |
| SVR-CSA | Training | 1.1208 | 0.0273 | 0.8706 | 0.0085 | 0.0017 |
| Testing | 1.7322 | 0.0486 | 0.6613 | 0.0147 | 0.0013 | |
| Whole set | 1.3627 | 0.0367 | 1.5319 | 0.0101 | 0.0016 | |
| SVR-BSA | Training | 1.1174 | 0.0253 | 0.8506 | 0.0081 | 0.0009 |
| Testing | 1.7248 | 0.0458 | 0.6423 | 0.0140 | 0.0074 | |
| Whole set | 1.3541 | 0.0335 | 1.4929 | 0.0095 | 0.0028 | |
| ANFIS | Training | 1.2158 | 0.0329 | 0.9003 | 0.0086 | 0.0008 |
| Testing | 1.8845 | 0.0518 | 0.7115 | 0.0149 | 0.0011 | |
| Whole set | 1.4234 | 0.0406 | 1.6118 | 0.0103 | 0.0009 | |
| ANFIS-PSO | Training | 0.9912 | 0.0249 | 0.8010 | 0.0074 | 0.0024 |
| Testing | 1.6432 | 0.0405 | 0.6023 | 0.0131 | 0.0028 | |
| Whole set | 1.2105 | 0.0279 | 1.4033 | 0.0081 | 0.0019 | |
| ANFIS-CSA | Training | 0.9868 | 0.0207 | 0.7412 | 0.0065 | 0.0004 |
| Testing | 1.6247 | 0.0322 | 0.5708 | 0.0114 | 0.0011 | |
| Whole set | 1.1940 | 0.0255 | 1.3120 | 0.0078 | 0.0010 | |
| ANFIS-BSA | Training | 0.9684 | 0.0160 | 0.6007 | 0.0058 | 0.0012 |
| Testing | 1.5849 | 0.0261 | 0.4206 | 0.0100 | 0.0017 | |
| Whole set | 1.1581 | 0.0197 | 1.0213 | 0.0072 | 0.0015 |
| Methods | Performance Indexes | MAPE (%) | RMSE | Absolute Error | U-Statistic | RACF |
|---|---|---|---|---|---|---|
| MLP | Training | 0.7451 | 0.0227 | 1.7845 | 0.0097 | 0.0002 |
| Testing | 2.4101 | 0.1541 | 1.4712 | 0.0310 | 0.0005 | |
| Whole set | 1.1125 | 0.0478 | 3.2557 | 0.0189 | 0.0004 | |
| MLP-PSO | Training | 0.6521 | 0.0201 | 1.5924 | 0.0088 | 0.0017 |
| Testing | 2.2273 | 0.1287 | 1.2873 | 0.0251 | 0.0022 | |
| Whole set | 0.9547 | 0.0421 | 2.8798 | 0.0157 | 0.0020 | |
| MLP-CSA | Training | 0.7017 | 0.0218 | 1.6738 | 0.0093 | 0.0004 |
| Testing | 2.3414 | 0.1324 | 1.3671 | 0.0275 | 0.0002 | |
| Whole set | 1.0987 | 0.0441 | 3.0409 | 0.0170 | 0.0003 | |
| MLP-BSA | Training | 0.6013 | 0.0193 | 1.5024 | 0.0080 | 0.0032 |
| Testing | 2.2014 | 0.1214 | 1.2017 | 0.0223 | 0.0006 | |
| Whole set | 0.9101 | 0.0400 | 2.7041 | 0.0125 | 0.0019 | |
| SVR | Training | 1.2349 | 0.0332 | 2.2145 | 0.0128 | 0.0032 |
| Testing | 2.7497 | 0.1762 | 2.0011 | 0.0398 | 0.0045 | |
| Whole set | 1.5743 | 0.0624 | 4.2156 | 0.0296 | 0.0038 | |
| SVR-PSO | Training | 0.5978 | 0.0186 | 1.4786 | 0.0076 | 0.0040 |
| Testing | 2.1785 | 0.1204 | 1.1963 | 0.0217 | 0.0021 | |
| Whole set | 0.9002 | 0.0387 | 2.6749 | 0.0118 | 0.0028 | |
| SVR-CSA | Training | 0.6213 | 0.0195 | 1.5207 | 0.0085 | 0.0015 |
| Testing | 2.2314 | 0.1225 | 1.2203 | 0.0232 | 0.0016 | |
| Whole set | 0.9230 | 0.0421 | 2.7041 | 0.0137 | 0.0015 | |
| SVR-BSA | Training | 0.5723 | 0.0178 | 1.4122 | 0.0071 | 0.0014 |
| Testing | 2.0994 | 0.1192 | 1.1801 | 0.0202 | 0.0018 | |
| Whole set | 0.8879 | 0.0371 | 2.5923 | 0.0105 | 0.0015 | |
| ANFIS | Training | 0.3534 | 0.0128 | 0.7789 | 0.0049 | 0.0021 |
| Testing | 1.9876 | 0.0560 | 0.5823 | 0.0207 | 0.0003 | |
| Whole set | 0.8634 | 0.0343 | 1.3612 | 0.0116 | 0.0013 | |
| ANFIS-PSO | Training | 0.3134 | 0.0120 | 0.7567 | 0.0042 | 0.0009 |
| Testing | 1.9392 | 0.0532 | 0.5668 | 0.0198 | 0.0013 | |
| Whole set | 0.8083 | 0.0327 | 1.3235 | 0.0111 | 0.0012 | |
| ANFIS-CSA | Training | 0.3034 | 0.0109 | 0.7387 | 0.0039 | 0.0007 |
| Testing | 1.9233 | 0.0503 | 0.5523 | 0.0193 | 0.0002 | |
| Whole set | 0.7954 | 0.0310 | 1.2910 | 0.0105 | 0.0005 | |
| ANFIS-BSA | Training | 0.2730 | 0.0095 | 0.6890 | 0.0036 | 0.0014 |
| Testing | 1.9011 | 0.0442 | 0.5147 | 0.0184 | 0.0010 | |
| Whole set | 0.7740 | 0.0258 | 1.2037 | 0.0100 | 0.0011 |
| Item | Formula | Condition | ANFIS-BSA Unmitigated | ANFIS-BSA Mitigated |
|---|---|---|---|---|
| 1 | R | 0.8 < R0 | 0.9997 | 0.9965 |
| 2 | 0.85 < k < 1.15 | 0.9975 | 0.9993 | |
| 3 | 0.85 < k’ < 1.15 | 1.0014 | 1.0017 | |
| 4 | │m│ < 0.1 | −0.0024 | −0.0014 | |
| 5 | │n│ < 0.1 | −0.0013 | −0.0033 | |
| 6 | 0.5 < Rm | 0.9981 | 0.9923 | |
| Where | 0.8 < R02 < 1 | 1.0000 | 1.0000 | |
| 0.8 < R0’ 2 < 1 | 1.0000 | 1.0000 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aghay Kaboli, S.H.; Al Hinai, A.; Al-Badi, A.H.; Charabi, Y.; Al Saifi, A. Prediction of Metallic Conductor Voltage Owing to Electromagnetic Coupling Via a Hybrid ANFIS and Backtracking Search Algorithm. Energies 2019, 12, 3651. https://doi.org/10.3390/en12193651
Aghay Kaboli SH, Al Hinai A, Al-Badi AH, Charabi Y, Al Saifi A. Prediction of Metallic Conductor Voltage Owing to Electromagnetic Coupling Via a Hybrid ANFIS and Backtracking Search Algorithm. Energies. 2019; 12(19):3651. https://doi.org/10.3390/en12193651
Chicago/Turabian StyleAghay Kaboli, S. Hr., Amer Al Hinai, A.H. Al-Badi, Yassine Charabi, and Abdulrahim Al Saifi. 2019. "Prediction of Metallic Conductor Voltage Owing to Electromagnetic Coupling Via a Hybrid ANFIS and Backtracking Search Algorithm" Energies 12, no. 19: 3651. https://doi.org/10.3390/en12193651