Study on Unbalanced Magnetic Pulling Analysis and Its Control Method for Primary Helium Circulator of High-Temperature Gas-Cooled Reactor

Abstract

1. Introduction
2. The Mechanism of UMP in PHC-EP
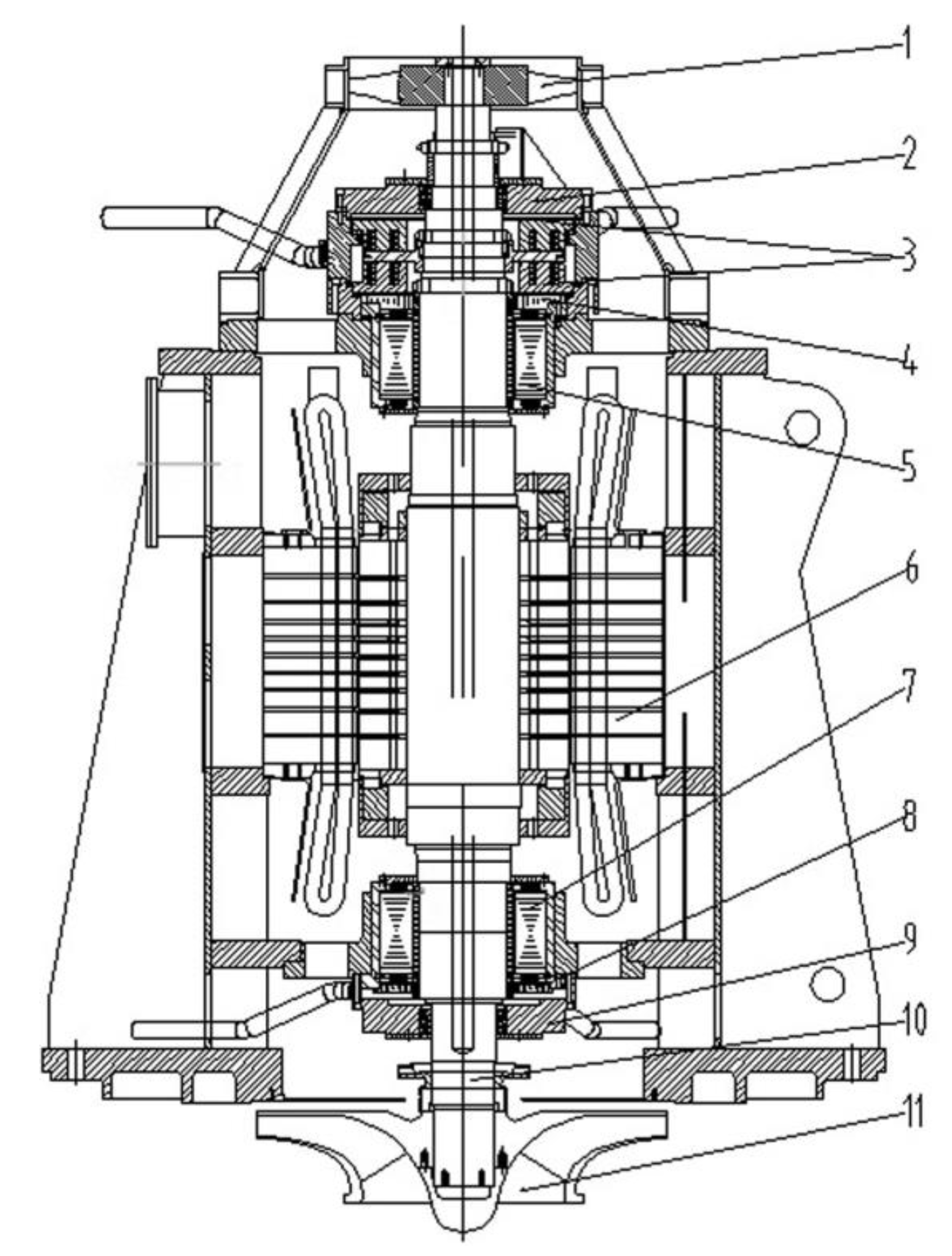
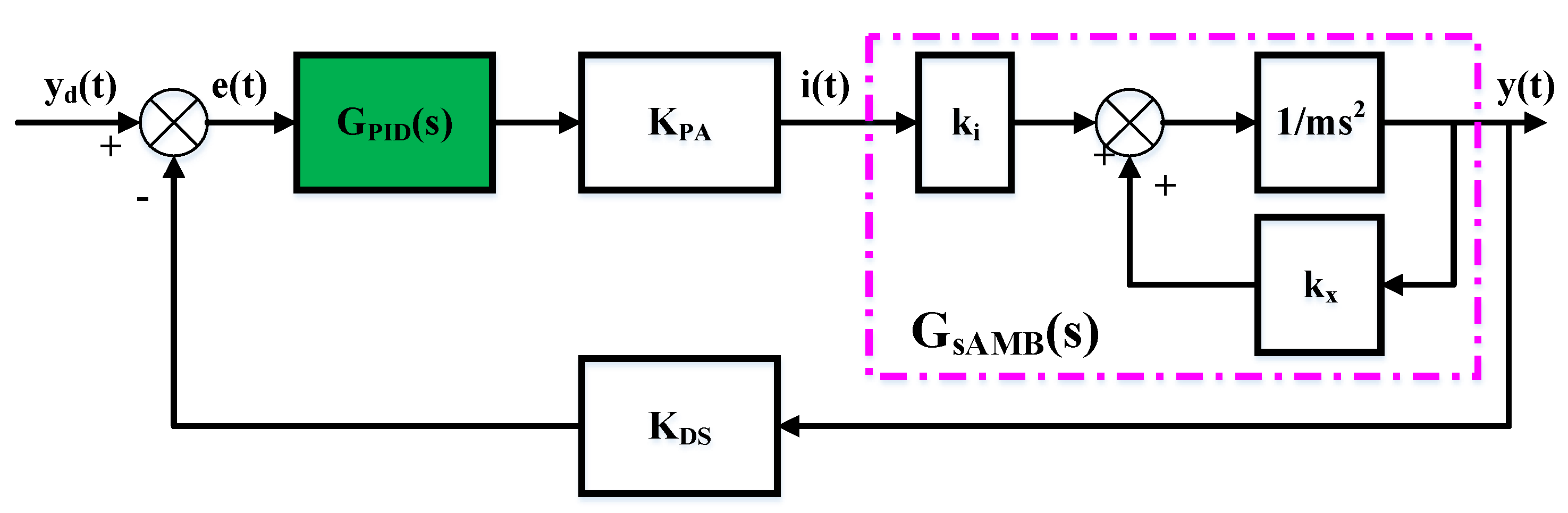
2.1. The Analysis of AMB in PHC-EP
2.2. The Analysis of UMP in PHC-EP
2.3. The Analysis of Multi-Frequency Vibration Characteristics
3. The Control Method for UMP
3.1. Distributed ILC Algorithm
- (1)
- is the initial control value. In this paper,.
- (2)
- is mainly used to improve the stability condition of the system with too fast convergence in the process of variable gain learning. It is also a kind of robust design method, to solve the problem that the identical initial conditions cannot be satisfied completely in each iteration. We set it here as the simplest inverse proportional function of. Namely,This is an empirical approach, and it can be adjusted according to the speed of actual iteration. Further,It can be seen from Equation (21) that as the number of iterations increases, is more and more dependent on the previous.
- (3)
- is used to solve the problem that it is lack of real-time performance as a constant learning gain used in the algorithm; we choose a comprehensive exponential function based on and as the differential gain to achieve fast convergence of the system. Namely,where is determined by Equation (23). Based on equations (23), (37), and (38), it can be seen that it is only necessary to determine if the condition expressed in Equation (23) is satisfied. Further,
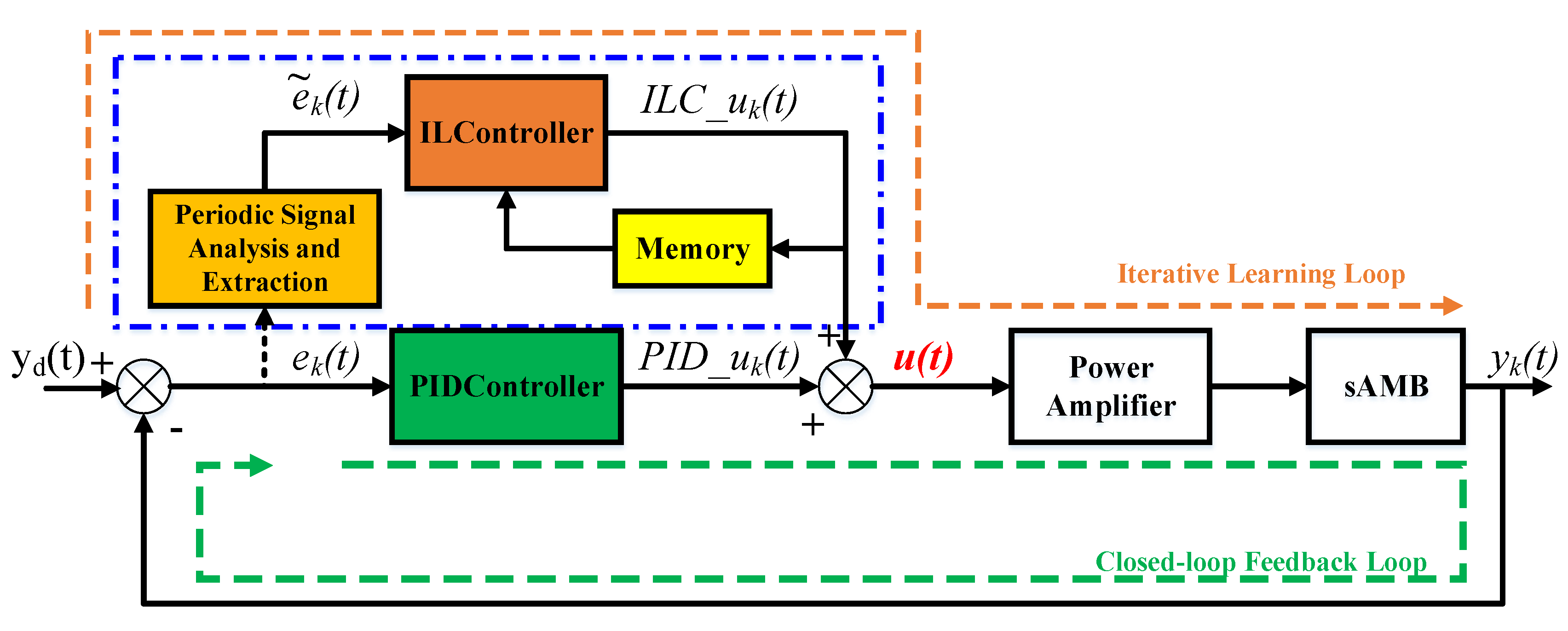
3.2. Integrated Parallel Control Scheme
3.3. Asynchronous Learning Mechanism Based on the Period of Rotation
- (1)
- The first step is to calculate the periodic component coefficients and , and expressed as
- (2)
- The second step is to synthesize periodic vibrations as expressed below:
4. Experimental Research on Control Method
4.1. Experimental System Design
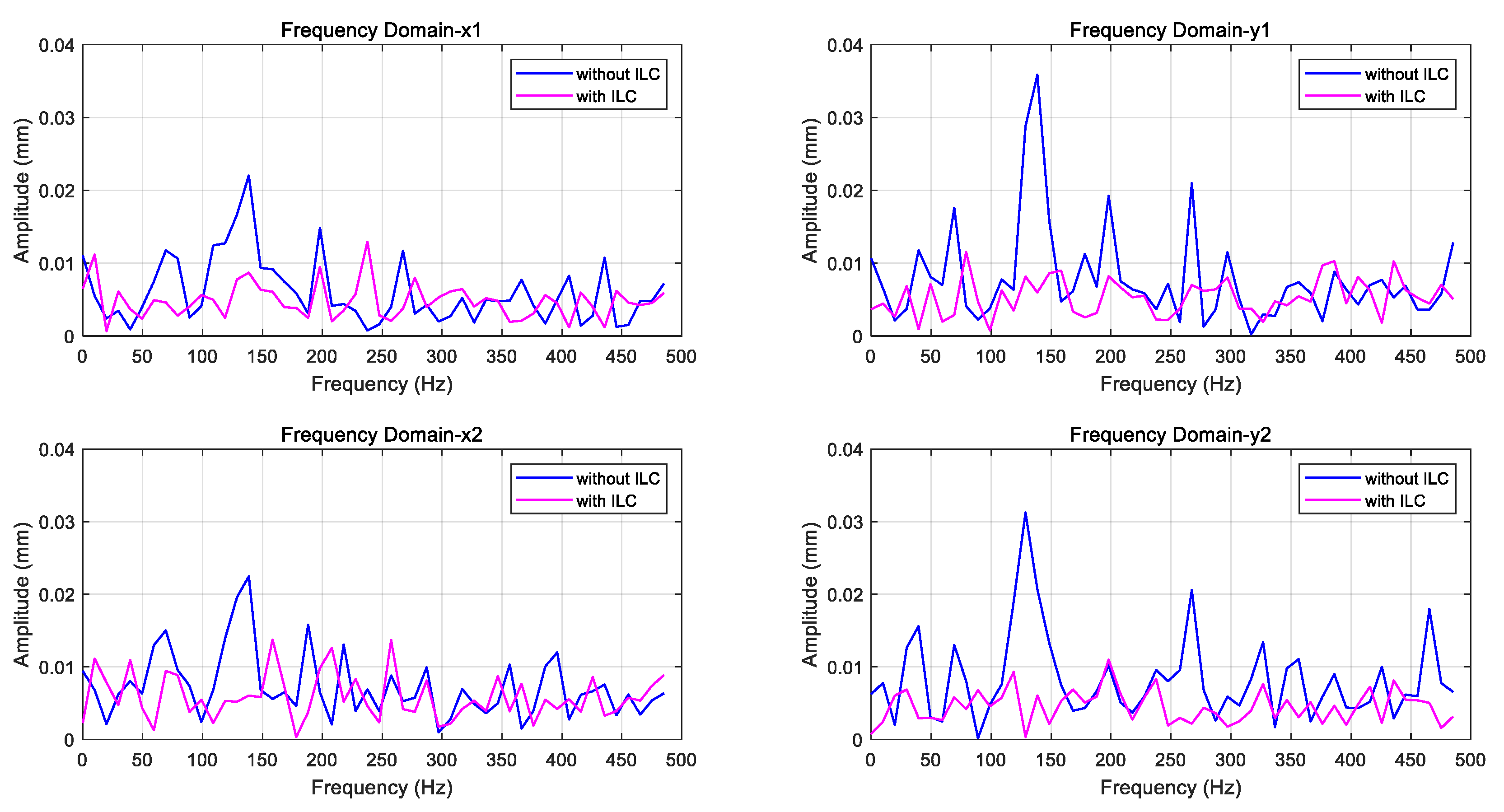
4.2. Experimental Results Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, Z.; Dong, Y.; Li, F.; Zhang, Y.; Wang, H.; Huang, X.; Li, H.; Liu, B.; Wu, X.; Wang, H.; et al. The Shandong Shidao Bay 200 MWe High-Temperature Gas-Cooled Reactor Pebble-Bed Module (HTR-PM) Demonstration Power Plant: An Engineering and Technological Innovation. Engineering 2016, 2, 112–118. [Google Scholar] [CrossRef]
- Dong, Z. Saturated Adaptive Output-Feedback Power-Level Control for Modular High Temperature Gas-Cooled Reactors. Energies 2014, 7, 7620–7639. [Google Scholar] [CrossRef]
- Maslen, E.; Schweitzer, G. Magnetic Bearings: Theory, Design, and Application to Rotating Machinery; Springer: Berlin, Germany, 2009. [Google Scholar]
- Yang, G.; Shi, Z.; Mo, N.; Zhao, L. Research on Active Magnetic Bearing Applied in Chinese Modular High-temperature Gas-cooled Reactor. Prog. Nucl. Energy 2014, 77, 352–360. [Google Scholar] [CrossRef]
- Zhang, G.; Wu, J.; Hao, L. Fast Calculation Model and Theoretical Analysis of Rotor Unbalanced Magnetic Pull for Inter-Turn Short Circuit of Field Windings of Non-Salient Pole Generators. Energies 2017, 10, 732. [Google Scholar] [CrossRef]
- Ruf, A.; Schroder, M.; Putri, A.K.; Konrad, R.; Franck, D.; Hameyer, K. Analysis and Determination of Mechanical Bearing Load Caused by Unbalanced Magnetic Pull. COMPEL 2016, 35, 728–743. [Google Scholar] [CrossRef]
- Xu, X.; Han, Q.; Chu, F. Nonlinear Vibration of a Generator Rotor with Unbalanced Magnetic Pull considering Both Dynamic and Static Eccentricities. Arch. Appl. Mech. 2016, 86, 1521–1536. [Google Scholar] [CrossRef]
- Zhang, A.; Bai, Y.; Yang, B.; Li, H. Analysis of Nonlinear Vibration in Permanent Magnet Synchronous Motors under Unbalanced Magnetic Pull. Appl. Sci. 2018, 8, 113. [Google Scholar] [CrossRef]
- Dorrell, D.; Kayani, O. Measurement and Calculation of Unbalanced Magnetic Pull in Wound Rotor Induction Machine. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Han, B.; Zheng, S.; Liu, X. Unbalanced Magnetic Pull Effect on Stiffness Models of Active Magnetic Bearing Due to Rotor Eccentricity in Brushless DC Motor Using Finite Element Method. Math. Probl. Eng. 2013, 2013, 1–10. [Google Scholar] [CrossRef][Green Version]
- Di, C.; Petrov, I.; Pyrhönen, J.J.; Bao, X. Unbalanced Magnetic Pull Compensation with Active Magnetic Bearings in a 2 MW High-Speed Induction Machine by FEM. IEEE Trans. Magn. 2018, 54, 1–13. [Google Scholar] [CrossRef]
- Yang, G.; Shi, Z.; Mo, N. Technical Design and Engineering Prototype Experiment of Active Magnetic Bearing for Helium Blower of HTR-PM. Ann. Nucl. Energy 2014, 71, 103–110. [Google Scholar] [CrossRef]
- Dimarogonas, A.D.; Paipetis, S.A.; Chondros, T.G. Analytical Methods in Rotor Dynamics; Springer: Berlin, Germany, 2013. [Google Scholar]
- Krause, P.; Wasynczuk, O.; Pekarek, S. Electromechanical Motion Devices, 2nd ed.; John Wiley & Sons: Haboken, NJ, USA, 2012. [Google Scholar]
- Gerling, D. Electrical Machines and Drives: Mathematical Fundamentals of Machine Topology; Springer: Berlin, Germany, 2012. [Google Scholar]
- Guo, D.; Chu, F.; Chen, D. The unbalanced magnetic pull and its effects on vibration in a three-phase generator with eccentric rotor. J. Sound Vib. 2002, 254, 297–312. [Google Scholar] [CrossRef]
- Sen, P. Principles of Electric Machines and Power Electronics, 3rd ed.; John Wiley and Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Howell, K. Principles of Fourier Analysis, 2nd ed.; Textbooks in Mathematics; CRC Press: Boca Raton, FL, USA, 2016; pp. 76–77. [Google Scholar]
- Schweitzer, G. Magnetic Bearings for Vibration Control; Technical Report No. 86-30185; NASA: Washington, DC, USA, 2014.
- Newmark, N. A method of computation for structural dynamics. J. Eng. Mech. Div. Am. Soc. Civ. Eng. 1959, 85, 67–94. [Google Scholar]
- Sal, K. ; World Public Library Association Author Community. Complex Roots of the Characteristic Equations 2 Differential Equations Series; Khan Academy: Mountain View, CA, USA, 2014. [Google Scholar]
- Xu, J.; Xu, Y. Linear and Nonlinear Iterative Learning Control; Springer: Berlin, Germany, 2003. [Google Scholar]
- Owens, D. Iterative Learning Control; Springer: Berlin, Germany, 2016. [Google Scholar]
- Rabbath, C.; Léchevin, N. Discrete-Time Control System Design with Applications; Springer: Berlin, Germany, 2014. [Google Scholar]
- Saff, E.; Arthur, D. Fundamentals of Matrix Analysis with Applications; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Maeda, G.; Manchester, I.; Rye, D. Combined ILC and Disturbance Observer for the Rejection of Near-Repetitive Disturbances with Application to Excavation. IEEE Trans. Control Syst. Technol. 2015, 23, 1754–1769. [Google Scholar] [CrossRef]
- Zundert, J.; Oomen, T. On Optimal Feedforward and ILC: The Role of Feedback for Optimal Performance and Inferential Control. IFAC PapersOnLine 2017, 50, 6093–6098. [Google Scholar]
- Xu, J.; Panda, S.; Lee, T. Real-Time Iterative Learning Control: Design and Applications; Springer: Berlin, Germany, 2009. [Google Scholar]
- Sundararajan, D. The Discrete Fourier Transform Theory, Algorithms and Applications; World Scientific: Singapore, 2001. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Rotor mass with impeller | 4 000 kg |
| Rated speed | 4 000 () |
| Motor Type | Three phase induction () |
| AMB control method | Distributed control |
| Operation mode | Constant speed |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, Y.; Mo, N.; Sun, Z.; Zhou, Y.; Shi, Z. Study on Unbalanced Magnetic Pulling Analysis and Its Control Method for Primary Helium Circulator of High-Temperature Gas-Cooled Reactor. Energies 2019, 12, 3682. https://doi.org/10.3390/en12193682
Zheng Y, Mo N, Sun Z, Zhou Y, Shi Z. Study on Unbalanced Magnetic Pulling Analysis and Its Control Method for Primary Helium Circulator of High-Temperature Gas-Cooled Reactor. Energies. 2019; 12(19):3682. https://doi.org/10.3390/en12193682
Chicago/Turabian StyleZheng, Yangbo, Ni Mo, Zhe Sun, Yan Zhou, and Zhengang Shi. 2019. "Study on Unbalanced Magnetic Pulling Analysis and Its Control Method for Primary Helium Circulator of High-Temperature Gas-Cooled Reactor" Energies 12, no. 19: 3682. https://doi.org/10.3390/en12193682
APA StyleZheng, Y., Mo, N., Sun, Z., Zhou, Y., & Shi, Z. (2019). Study on Unbalanced Magnetic Pulling Analysis and Its Control Method for Primary Helium Circulator of High-Temperature Gas-Cooled Reactor. Energies, 12(19), 3682. https://doi.org/10.3390/en12193682