A Single Intersection Cooperative-Competitive Paradigm in Real Time Traffic Signal Settings Based on Floating Car Data †




Department of Civil Engineering, Università della Calabria, Via P. Bucci Cubo 46b, 87036 Rende (CS), Italy
*
Author to whom correspondence should be addressed.
†
This paper is an extended version of our paper published in Cooperative-Competitive Paradigm in Traffic Signal Synchronization Based on Floating Car Data. In Proceedings of 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Palermo, Italy, 12–15 June 2018.
Energies 2019, 12(3), 409; https://doi.org/10.3390/en12030409
Submission received: 26 December 2018
/
Revised: 18 January 2019
/
Accepted: 26 January 2019
/
Published: 28 January 2019
(This article belongs to the Special Issue Selected Papers from EEEIC 2018—18th International Conference on Environment and Electrical Engineering)
Abstract
:New technologies such as “connected” and “autonomous” vehicles are going to change the future of traffic signal control and management and possibly will introduce new traffic signal systems that will be based on floating car data (FCD). The use of floating car data to regulate traffic signal systems, in real time, has the potential for an increased sustainability of transportation in terms of energy efficiency, traffic safety and environmental issues. However, research has never explored how not “connected” vehicles would benefit by the implementation of such systems. This paper explores the use of floating car data to regulate traffic signal systems in real-time in a single intersection and in terms of cooperative-competitive paradigm between “connected” vehicles and conventional vehicles. In a dedicated laboratory, developed for testing regulation algorithms, results show that “invisible vehicles” for the system (which are not “connected”) in most simulated cases also benefit when real time traffic signal settings based on floating car data are introduced. Moreover, the study estimates the energy and air quality impacts of a single intersection signal regulation by evaluating fuel consumption and pollutant emissions. Specifically, the study demonstrates that significant improvements in air quality are possible with the introduction of FCD regulated traffic signals.
1. Introduction
Co-operative intelligent transportation systems (C-ITS) can be used to share information between drivers and road management. Various co-operative systems have been proposed in Europe and have obtained research in funded projects, among them SAFESPOT [1], EuroFOT [2] and DRIVE C2X [3].
According to the European Commission traffic congestion costs are an important issue and road transportation accounts for more than 25% of the total energy consumption in the EU. Traffic signal regulation can be a major cause of delays in urban travelling and often, especially in Italy, traffic signals are regulated without adjusting them dynamically to real changing traffic conditions. Static signal plans adopted according to simple traffic surveys are extended to all other days and hours of the week resulting in great unnecessary delays for travellers.
Imperfect regulation of traffic lights sometime is perceived by drivers and can also cause the lack of respect for the rules (i.e., southern Italy); red-light running violations are also a serious problem in the USA [4]. In other countries like The Netherlands and Germany, traffic signals were, experimentally, completely eliminated, showing that congestion was reduced and safety increased [5,6]. Cassini [7,8] also presents a fascinating case where traffic signals were installed improperly causing residents to protest, without success, until the moment the lights went off for a technical failure and the traffic jams magically disappeared.
While these experiences hint that regulating traffic signal systems properly is an important and actual problem, mobile internet coupled with Global Navigation Satellite System (GNSS) localization systems are creating disruptive innovations in the transportation sector. A real technical revolution has started, driven by the convergence of mobile internet, GNSS and the introduction of “connected” vehicles.
Intelligent Transportation Systems (ITS) can take advantage in the use of Floating Car Data (FCD) for managing traffic flow or to extract traffic flow parameters and many large scale deployments of such systems based on Floating Car Data (FCD) are already showing the use of mobile phones [9,10,11,12] and wireless communications [13,14] combined with GNSS technologies.
Smartphones (and connected vehicles) can obtain localization and speed information from GNSS systems such as Galileo, GPS and Glonass. GPS sensors embedded in smartphones provide an economical method to obtain vehicular travel times [15] and to evaluate traffic scenarios [16,17]. Smartphones also allow the estimation of traffic safety parameters [18] and route choices [19]. Mobile devices have also been used to asses safety and risks by insurance companies [20] and for traffic safety [21,22] and fuel consumption estimation [23].
Cooperative systems based on smartphones are spontaneously spreading in ordinary use (BlaBla Car, Uber, etc.). Cooperative systems based on smartphones for pedestrians and bicycles are also emerging [24]. All these concepts will be further developed with the introduction of connected vehicles. Some of the complications connected with the implementation of ITS systems are discussed in [25] and [26]. The methodology of this paper can be implemented easily just with smartphones yet results are general and can be applied to any connected vehicle that can be the base of an FCD system.
The problem of traffic signal synchronization was studied starting in 1967 by Newell and others [25,26,27,28,29,30]. The problem of adaptive synchronization of traffic lights was then explored in 1980 by Sims [31] for the city of Sydney, which suffered from severe congestion problems. On that occasion the SCAT system was conceived in which a series of road signals are adaptive and coordinated allowing optimizing the use of the city road network. The Sidney SCAT system consisted of a central server and eleven distributed computers in different parts of the city, which managed to control up to 200 control units each, and over 1000 sensors and traffic light stations distributed over 1500 square kilometres of the city. Subsequently, the SCOOT system was created and then the TRANSYT method used to set up green wave systems [32]. Both in TRANSYT and in SCOOT it was important to reduce the sum of the average queues present in the area assigning the green as fast as possible. These systems estimate the length of the queue, and consequently regulate the traffic lights. TRANSYT estimates traffic conditions every hour while SCOOT does so every 4 s. Both systems assume a standard speed and dispersion for the vehicle platoons and a known and constant saturation flow rate during the green phase.
Sehgal et al. [33] proposed a similar system in which a series of sensors measure road traffic information and send them to a central monitoring station that modifies the traffic light cycles in the network dynamically. Their method was based on the simple idea of assigning the priority of green to the main flow. However, Sehgal highlights some shortcoming of the method where a change in traffic light applied too early can lead to congestion on other roads and a change too late could lead to traffic jams on the main road.
A variant of the SCAT and SCOOT systems was proposed in 2013 by Faye [34] developing the TAPIOCA algorithm, which regulates the traffic light cycles on the basis of data collected from wireless sensors, cameras, and a network of sensors located in the intersections. However, this system is applied only to virtual data of the French city of Amiens simulated through SUMO. The regulation of all intersections works with a local adaptation logic. This is done to limit the huge data exchange between the various intersections.
Choosing a different approach Clempner and Poznyak [35] analyzed the problem of synchronizing a traffic light network using game theory based on the extraproximal method. For them, too, the goal at an intersection is to minimize the queuing delay and set the green time for each phase, but the light controllers are considered as players in a Markov chain system.
More traditionally, in 2016 Ghazal [36] affirmed that for smart traffic lights, it is not advisable to use video sensors or fuzzy algorithms because this would only involve a waste of calculation resources.
Traffic light regulation can be done effectively knowing the exact position of vehicles at intersections. This information is useful to allocate green and red times improving real time regulation. Some works have been published on the use of Radio-Frequency Identification (RFID) tags or FCD data to regulate traffic lights [37,38,39,40]. Research has been carried out to obtain traffic light green times from FCD data coming from smart-phones [41,42]. The following works have introduced the idea to use FCD for traffic light regulation and the concept of FCD Adaptive Traffic Signals (FCDATS): [43,44]. In FCDATS all “connected” vehicles send localization information to a central traffic signal controller.
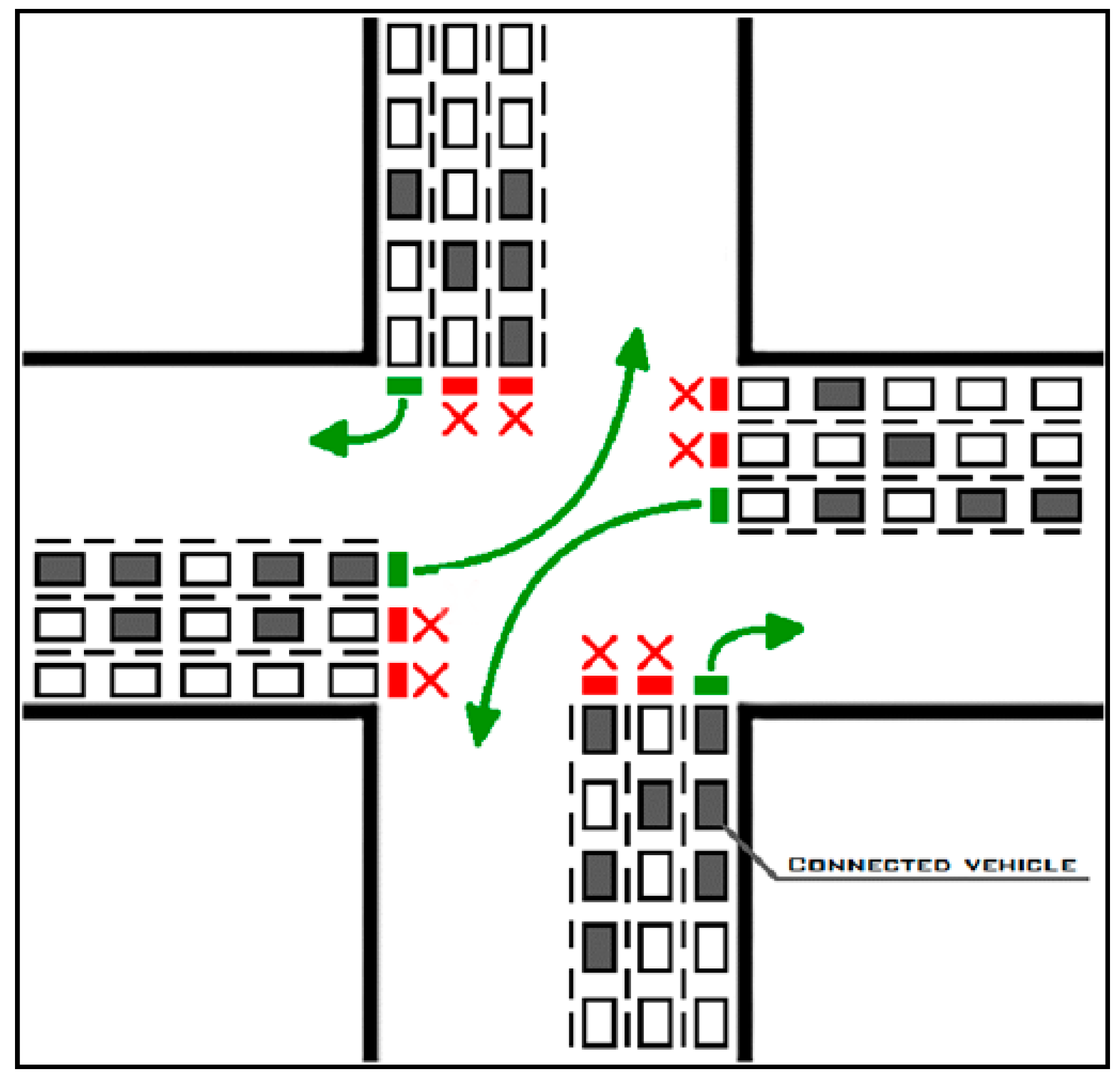
FCDATS systems regulate traffic lights according to the known position of some percentage of total vehicles. The traffic signal regulation algorithms would tend to minimize queuing and delays at intersections. To obtain this result it is useful to know the queue length for every group of lanes that is coupled with a turning manoeuvre. In the case of intersections with a single lane for each incoming road, the accuracy of smart-phone GNSS data is usually enough to establish the length of the queue and apply queue based control algorithms. Instead in the case of multiple lanes this is cannot be taken for granted.
As an example, in a situation such as that depicted in Figure 1, a FCDATS systems would be more accurate to reduce traffic delays at intersection by knowing the exact lane distribution of instrumented vehicles (dark shaded vehicles) in queues.
The accuracy of GNSS smartphone data has become the object of research in [45], in a study on the reconstruction of signal cycles from FCD data. The GNSS position was compared to the simulated one and an error area was used, with a radius given from a Gaussian distribution with average 0 and s.d. 25 m. This assumption derives from [46] in which the GPS position was corrected with Bayesian filters using data from different sensors. However, the study was intended for pedestrian GPS position correction and not vehicles. Speeds were, in fact, between 0 and 2 m/s.
Prior to these studies Angermann [47] also hypothesized that the position of GNSS data could be simulated with Gaussian distribution with standard deviation between 20 and 30 m. In other studies conducted on GPS signal reception problems [14,48,49,50,51,52] it was discovered that in an location where there are constructions and solid obstacles to satellite signals the error grows. GNSS can fail among tall buildings in situations that are defined as “urban canyons”. The need to recognize the lane occupancy of a car is also useful in autonomous driving. In this case, cameras are used to identify the lane lines on the road pavement. A summary of the state-of-the-art of camera methods can be found in [53]. Algorithms have been developed to correct satellite data and obtain an accurate positioning on the road e.g., in: [54] or [55]. The problem in most GNSS car positioning systems is that the accuracy is insufficient to identify lane occupancy. Solutions have been proposed to bring the accuracy to a level that would allow lane identification: [56] and [57] by using, for example differential GPS (D-GPS). Recent works on lane determination are: [58] and [59]. In [60], a simple method for smartphone GPS to determine the lane position of a car is proposed.
One paper, [61] proposes a fuzzy set procedure to identify occupied car lanes using GNSS data obtained from mobile phones. The proposed method was applied to three intersections in an Italian city. The paper shows the efficacy of the fuzzy set method when the actual car lane positions and those determined by the method are confronted.
FCDATS systems, such as that presented in [44], are based on the principle of a cooperative-competitive paradigm since “connected” drivers who are part of the system are granted green priority on other vehicles (competition), yet “connected” vehicles are also source of useful information for other vehicles (cooperation). The cooperative-competitive paradigm arising from FCD-based adaptive traffic signals, though, was not extensively explored in [44] or in any other work. An introduction to this topic in the simple case of signal cycle offset regulation can be found in [62] and the topic is further developed in this paper considering an extensive set of traffic scenarios for a single intersection. While it is clear, in a traditional adaptive traffic signal system, how to evaluate benefits for vehicles that are moving on a regulated network (in terms of reduced travel time). The same evaluation in an FCDATS system instead becomes not trivial since different percentages of “connected” vehicles could turn into different benefits (or damages) among different users. With an FCDATS system there is an intrinsic difference with all other adaptive traffic signal systems: some vehicles are “connected” and are considered in traffic signal regulation while other vehicles are not detected and accounted by the system. The evaluation of FCDATS systems performance must be based on the more complex assessment of travel times for both categories of vehicles: those “connected” and those “not connected”, with different percentages of “connected” vehicles”.
Since, in all past scientific works, there was no formal definition of cooperation and competition, in traffic signal settings, we will give a definition in this paper with the aim of evaluating different scenarios in terms of cooperation-competition. With traffic signal regulated intersection there is an obvious rivalry, between different categories of vehicles, for the right to move first at the intersection. So we will assume this general definition for competition at traffic signals: “Rivalry between different vehicles groups in the use of the scarce resource of green time at a signal regulated intersection” (which could be extended and generalized to the general case of road traffic use: “Rivalry between different vehicles in the use of the scarce resource of space on a traffic network”). With traditional traffic signals there is competition between vehicles using different lanes and receiving green in different phases. In FCDATS systems “connected” vehicles are in competition with “not connected” vehicles since regulation algorithms will regulate traffic signal according to the detected “connected” vehicles. This regulation may take green time from “not connected” vehicles and advantage “connected” vehicles. In this paper we will consider only competition between “connected” and “not connected” vehicles.
In FCDATS cooperation is also present since all “connected vehicles” are cooperating to produce an improved real time representation of traffic situation in the central server. This representation does not take into account “not connected” vehicles.
What is realistically expected is that if the percentage of “connected” vehicles is low they would get more green time than “not connected” vehicles. In practice they would cooperate among themselves competing at the same time with “not connected” vehicles, actually, stealing green time from them whenever possible.
Since FCDATS systems are systems in which competition and cooperation are both present at the same time we define them as “coopetitive” systems. Once a FCDATS system is introduced, drivers have the possibility of joining the system and becoming “connected”. Is this choice a selfish choice or also an altruistic choice? To what extent and in what cases would the introduction of an FCDATS system contribute to create competition or cooperation among drivers? Answers to these questions are given in a single intersection scenario by applying a competition-cooperation diagram which is introduced in Section 2. Some simulation results in terms of the competition-cooperation diagram are presented in Section 3.1. The last section of the paper (Conclusions), also presents more insights into the above-described issues.
2. Materials and Methods
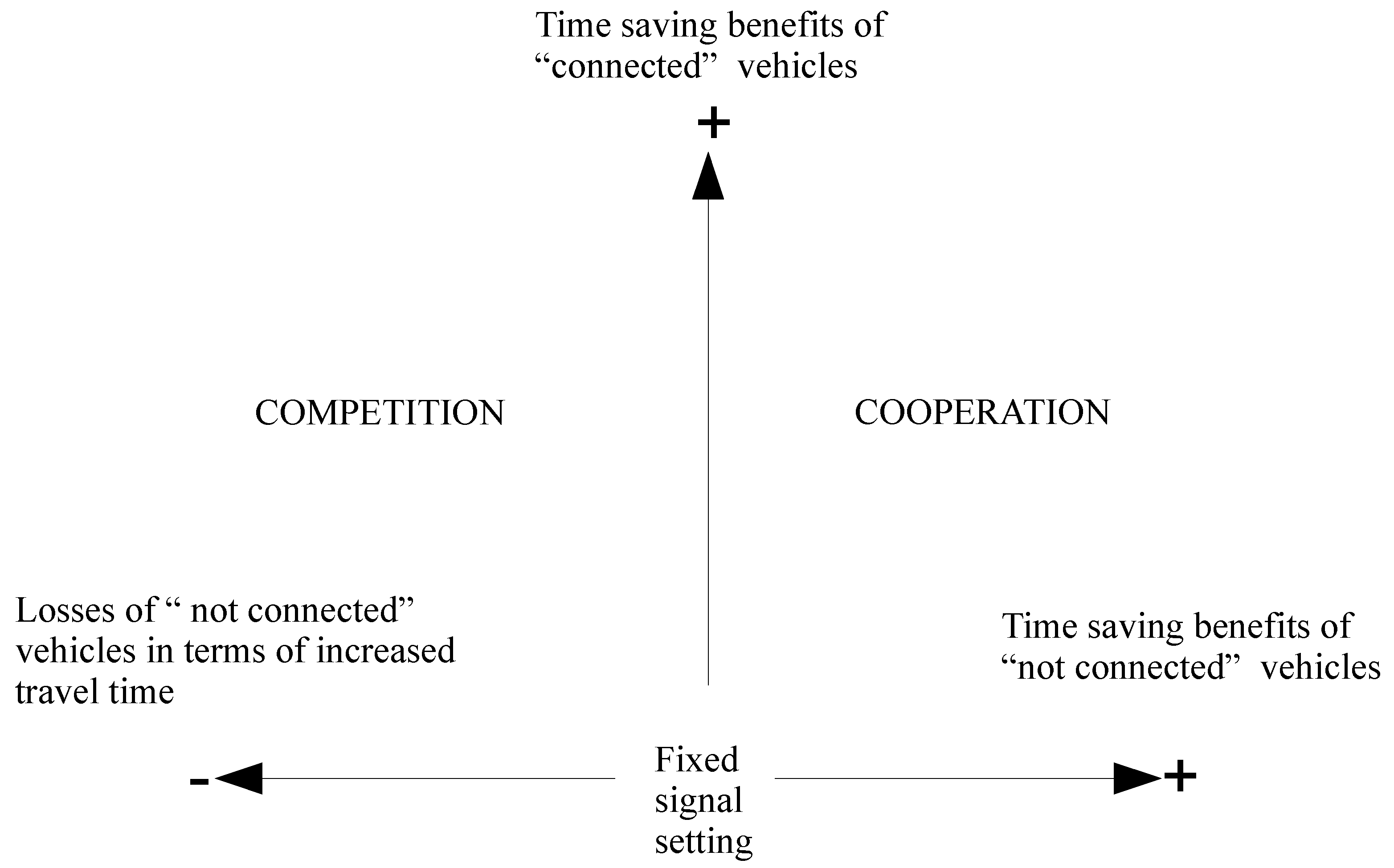
An evaluation of FCDATS systems in terms of competition-cooperation is proposed which is based on the dual utility diagram put forward by Cipolla [63] which assigns an action to four quadrants depending on whether the action brings benefits or losses to others or to themselves. Since in FCDATS systems there are only two groups of drivers which can benefit (or lose) in terms of travel time gains (or losses) such a diagram seems able to capture the level of cooperation-competition.
Since it presents level of competition and cooperation at the same time we will call this diagram “Coopetition diagram”. The diagram is structured as shown in the following Figure 2. The x axis is the percentage gain or loss in term of average travel time, with respect to a non-controlled situation, for “not connected” vehicles while the y axis is the percentage of gain for “connected” vehicles.
This research is based on the results of [64], where some issues relative to the accuracy of the GNSS smart-phone were explored by conducting an experimental survey. GNSS device error was correlated to a number of factors such as the occlusion of the sky. The study produced a first algorithm to be inserted into micro-simulators in order to correctly simulate FCD data.
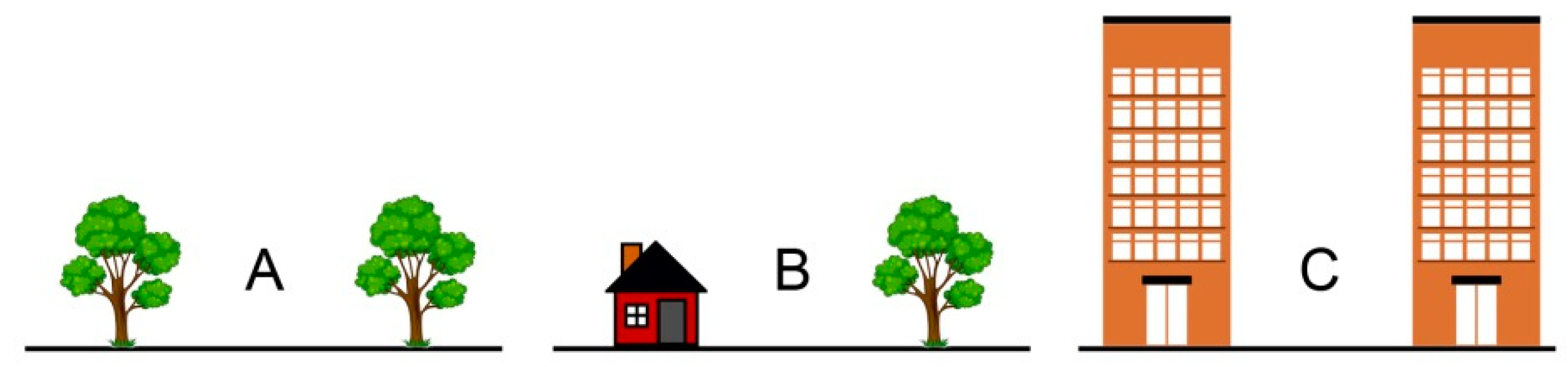
Experiments were performed in three different scenarios. Figure 3 shows the three types of scenarios in which experimental data were gathered. Case A represents a scenario where the satellite localization is almost perfect as the sky is almost completely clear. Case B represents a scenario where sight disturbances can reduce satellite signals. Case C is a scenario where there are tall buildings at least 18 m on the side of the street (urban canyon). The experimental survey was conducted in the urban area of Cosenza (Italy) fully representing the three above-described scenarios. A high precision GPS system was used to assess the accuracy of five different smart-phones in the three mentioned scenarios. In accordance with GNSS localization theory Rayleigh distribution was used as a reference for distance error and uniform distribution for angle error. Based on these experimental data a procedure was developed to reproduce GNSS error in traffic simulations and applied in this work.
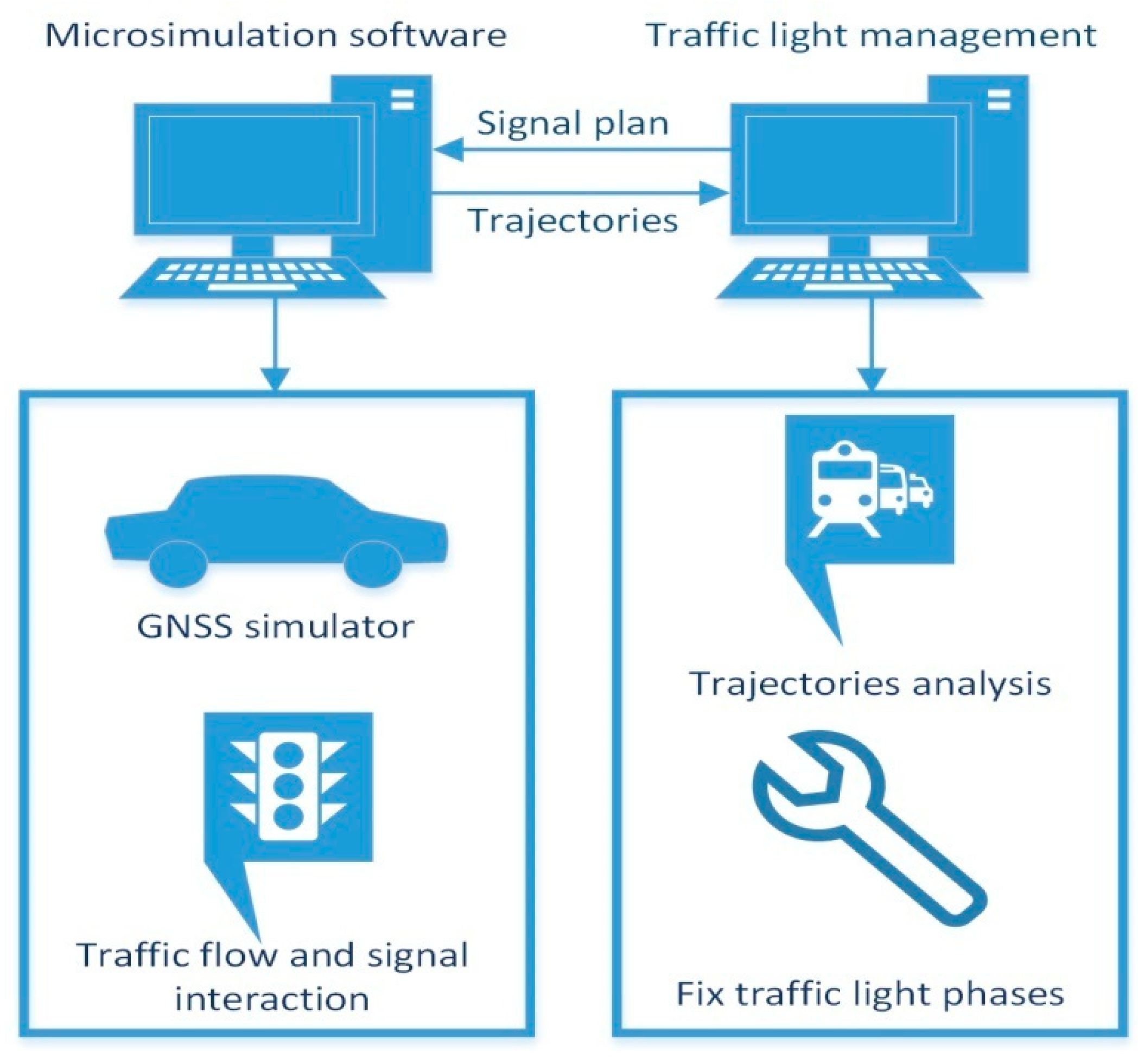
To evaluate performances of FCDATS systems we developed a special laboratory prototype in which to carry out experimental tests. Our laboratory prototype (Figure 4) is composed of a central server which is able to regulate traffic signals from connected vehicles data (such as one that can be used in real time in the field connected with real traffic signals) and another computer that creates a virtual reality environment by microsimulation combined with a module that simulates the GNSS errors. This laboratory implementation makes it possible to evaluate realistically the performances of the proposed system before a real implementation in the field. We applied the standard practice of using simulation to test the effectiveness of the FCDATS system because, in most academic studies, traffic light regulation and traffic signal optimization were designed and analyzed in simulated environments [65,66,67,68]. Once the results have been analyzed, if they are promising, the system can be tested in a real environment.
The virtual reality environment is created, with a micro-simulation module based on the Tritone microscopic traffic simulator [69,70]. Some details are presented in the following on: localization error simulation model, map-matching algorithm, car-following model, traffic emission model and fuel consumption model.
The localization errors are generated in a dedicated module for post-processing of vehicles trajectories. This module is very important for correctly assessing performances of a traffic settings algorithm.
Localization error model: the simulation procedure as in [70] assigns the first vehicle localized position on the network when the vehicle is generated (in the microsimulation), according to localization errors. This is done addressing separately distance error (which is a positive variable theoretically distributed as a Rayleigh variable) and angle error (which follows a uniform distribution). A distance error is generated, according to one of the three case scenarios, with a different Rayleigh distribution.
After the first time step, the error in distance is generated following a normal distribution with mean and standard deviation that are relative to one of the three scenarios and also relative to the error absolute value in the preceding time step (this is an empirical procedure that introduces some approximation). The experimental data showed, in fact, that autocorrelation translates into a different standard deviation of the error at time t+1 according to the absolute value of the error at time t.
A similar procedure is carried out for the angle simulation where instead the autocorrelation can be reproduced by just using a normal distribution for each of the three scenarios fully in accordance with theory. This can be done exactly following theory since the angle distribution, not considering autocorrelation, is a simple uniform distribution.
The procedure above described is useful to generate a sequence of distance and angle errors and allows applying microsimulation to test generic ITS algorithms and strategies that are based on FCD data.
Generated position data are transferred via an internet protocol to the central signal regulating server. The central server of the system elaborates positions, by correcting introduced random localization errors with a map-matching algorithm. Elaborated position data are then fed into the adaptive traffic signal algorithm (FCDATS).
To carry out the above-described simulations, the GNSS error generation module, the map-matching algorithm and the algorithm for traffic light control were implemented using the microscopic traffic simulation model Tritone [71]. The use of Tritone allowed automatic simulation of 20 repetitions for every scenario. Inside Tritone specific car-following, emission and fuel consumption models were used as described in this section.
Car-following: one of the major concerns for considering signalization at intersections is the modelling of rear-end interactions involving vehicles travelling along the approaches. Approaching a slower leading vehicle (car-following regime) the driver must recognize consciously some action points, and consider others unconsciously. The conscious actions is determined by the speed difference, relative distance to the leading vehicle, and driver-depended behaviour. The Car-following Model that was selected to represent the interactions among vehicles of the traffic stream is Wiedemann 99 [72]. In Tritone, the car-following model parameters are set up according to [73], that calibrated the Wiedemann 99 model in an urban intersection located in Southern Italy.
In their study, Gallelli et al. established that the parameters significantly influencing driver behaviour are: “Desired Speed” (average) (km/h) that represents individual free flow speed, “Observed vehicle ahead” that affects drivers’ capacity to regulate their speed/distance according to the number of lead vehicles, “Standstill distance” (m) (CC0) that defines the desired distance between stopped cars, “Headway time” (s) (CC1), “Following variation” (m) (CC2) threshold for the entering “following” (CC3), “Positive following” threshold (CC5),” Speed dependency of oscillation” (CC6), “Oscillation acceleration” (CC7) and “Standstill acceleration” (CC8). The parameters values considered in TRITONE are reported in the following Table 1.
Traffic emission modelling: In this research the traffic emissions are modelled according to a consolidated emission model [74]. The emission model was calibrated on experimental evidence and takes into account the instantaneous kinematic values of single vehicles considering: the driving style and the vehicle characteristics. For all pollutant emission it was considered a general function which takes into account instantaneous speed and acceleration of vehicles. The pollutants modelled are nitrogen oxides (NOx), volatile organic compounds (VOC), carbon dioxide (CO2) and particulate matter (PM). This choice is based on their potential health impacts and external costs.
The pollutant emission function which was applied is:
This function was derived in [74] by Panis et al. and takes into account instantaneous speeds and accelerations: vn(t) and an(t) are the speed and acceleration of vehicle n at time t. E0 is a lower limit of emission (g/s) defined for each vehicle and pollutant type, and the f1–f6 coefficients, which are relative to vehicle and pollutant, are determined by the regression analysis. The exact coefficients, which were obtained using non-linear multiple regression technique, for each single vehicle type can be found in [74].
Fuel consumption model: The fuel consumption model considered is the Akcelik model [75]. The choice is due to highly accurate fuel consumption estimates for traffic analysis.
The vehicle parameters in the fuel consumption model include: Fuel type (percentage of diesel vehicles), maximum engine power, power to weight ratio, number of wheels and tyre diameter, rolling resistance factor, frontal area and the aerodynamic drag coefficient.
The model is applied on the vehicles trajectories obtained from microsimulation and is applied differently for each of the four-mode elemental (modal) travelling cases: cruise, acceleration, deceleration and idling.
3. Results
A case study is presented where a simple greedy algorithm (more extensively described in [44]) is applied for the optimization of traffic settings based on FCD data. The algorithm is among the few control algorithms for FCDATS that have been introduced in the literature. Most preceding scientific works on adaptive traffic signals were based on traffic flow variables as input. FCDATL algorithms are based on the known positions of some of the vehicles and thus FCDATL control algorithms are conceptually different.
The control algorithm: the algorithm establishes in real time the phase sequence, the green times and the total cycle time. It is based on the evaluation of the number of “connected” vehicles that are detected on every approaching street at the intersection. The algorithm at every cycle establishes the sequence of phases by choosing first the phases with more “connected” vehicles. Every phase receives a green time which is enough to clear the queue of “connected” vehicles. Vehicles that are not “connected” are not considered and the signal setting may change before some of them are able to exit the intersection. If there is no “connected” vehicle on some of the approaches the algorithm falls back on a reference pre-established cycle establishing green times according to the pre-established fixed times of green. The algorithm guarantees at least 4 s of green for every phase (according to UK traffic light rules). It must be noted that this simple algorithm can be used only on intersections that have one single lane for every approach.
The above described algorithm, intuitively, appears to give an advantage to “connected” vehicles. It is, in fact, expected that it would bring a high level of competition between “connected” and “not connected” vehicles in the sense that green times would be given to “connected” vehicles at the expense of “not connected” vehicles. The first case study was specifically designed to evaluate numerically these issues with the objective of shedding some light on competition-cooperation issues in FCD based regulation.
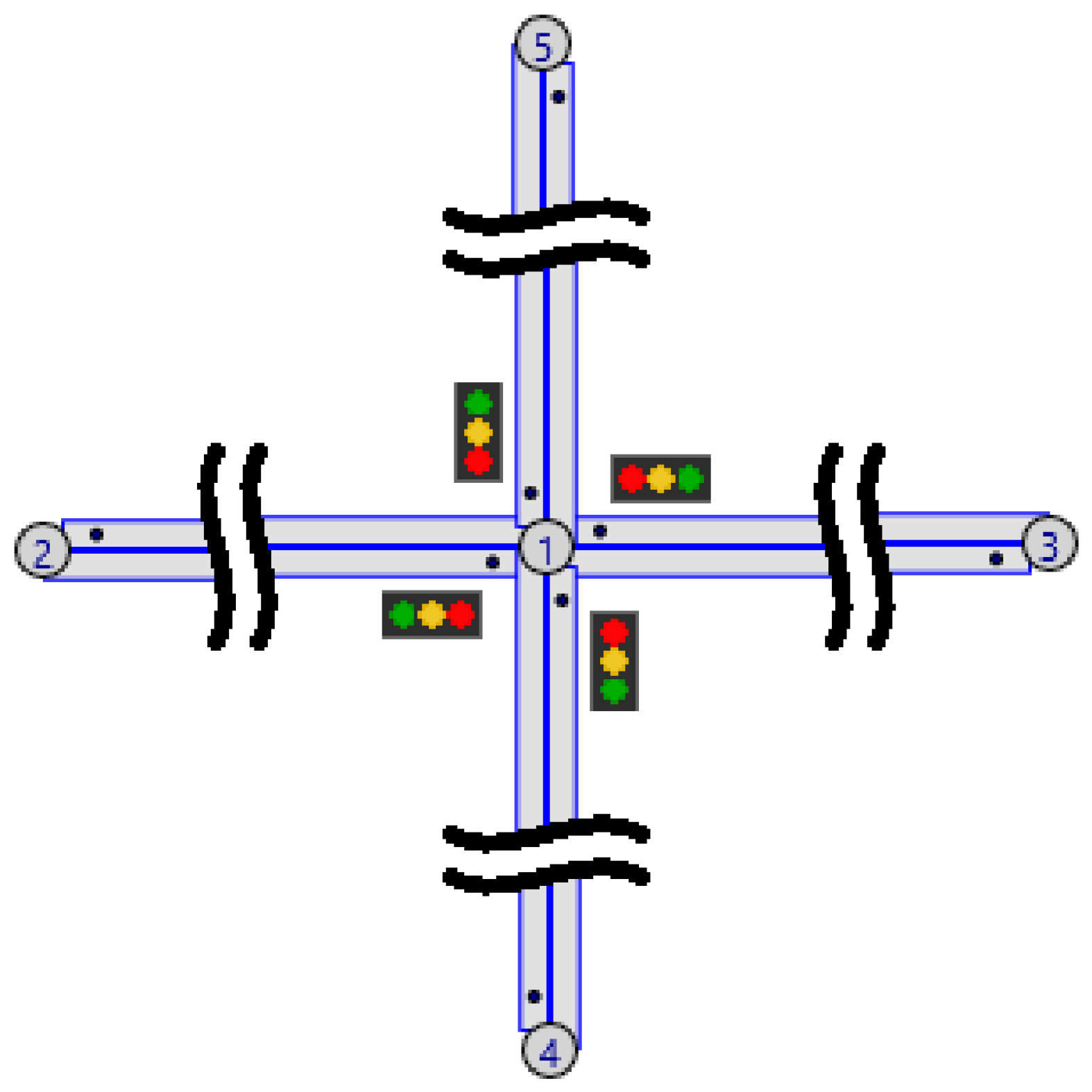
In this case study the simulated intersection is a typical symmetrical intersection with four approaching roads. Three different flow distributions were provided assuming that one direction is the main traffic direction: 60/40, 70/30 and 80/20. Approaching road links are of 200 m each. The direction of links 2-3 and 3-2 (see Figure 5) is considered the main direction. The distribution, of the various manoeuvres for a single approach, is uniform with 1/3 of the vehicles turning left, right or proceeding straight.
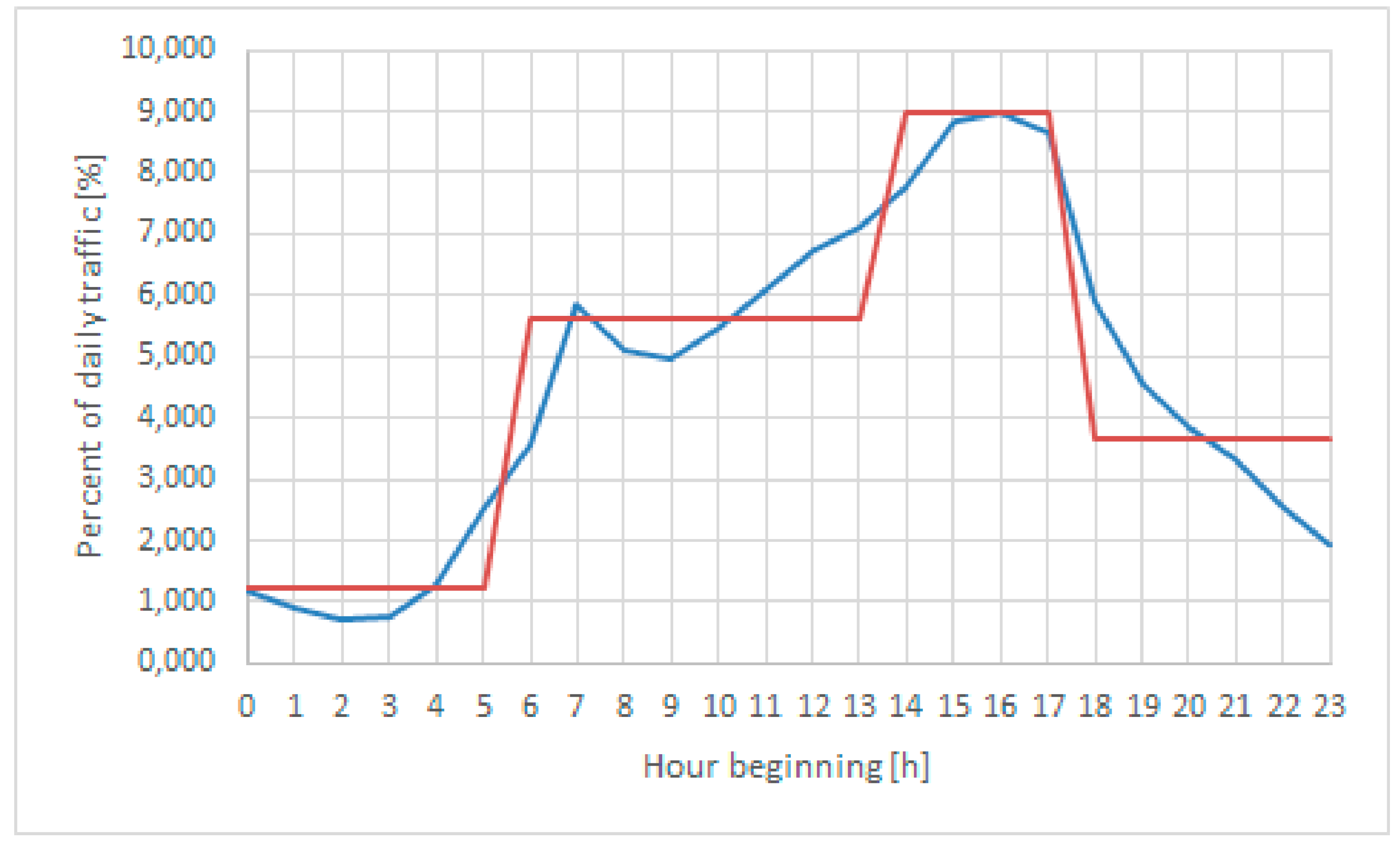
For the traffic demand a distribution such as that of the HCM 2010 [76] for the distribution of average daily traffic in urban areas is used. The distribution (Figure 6) was then approximated in order to obtain only four daily flows, 680, 424, 278 and 93 veh/h.
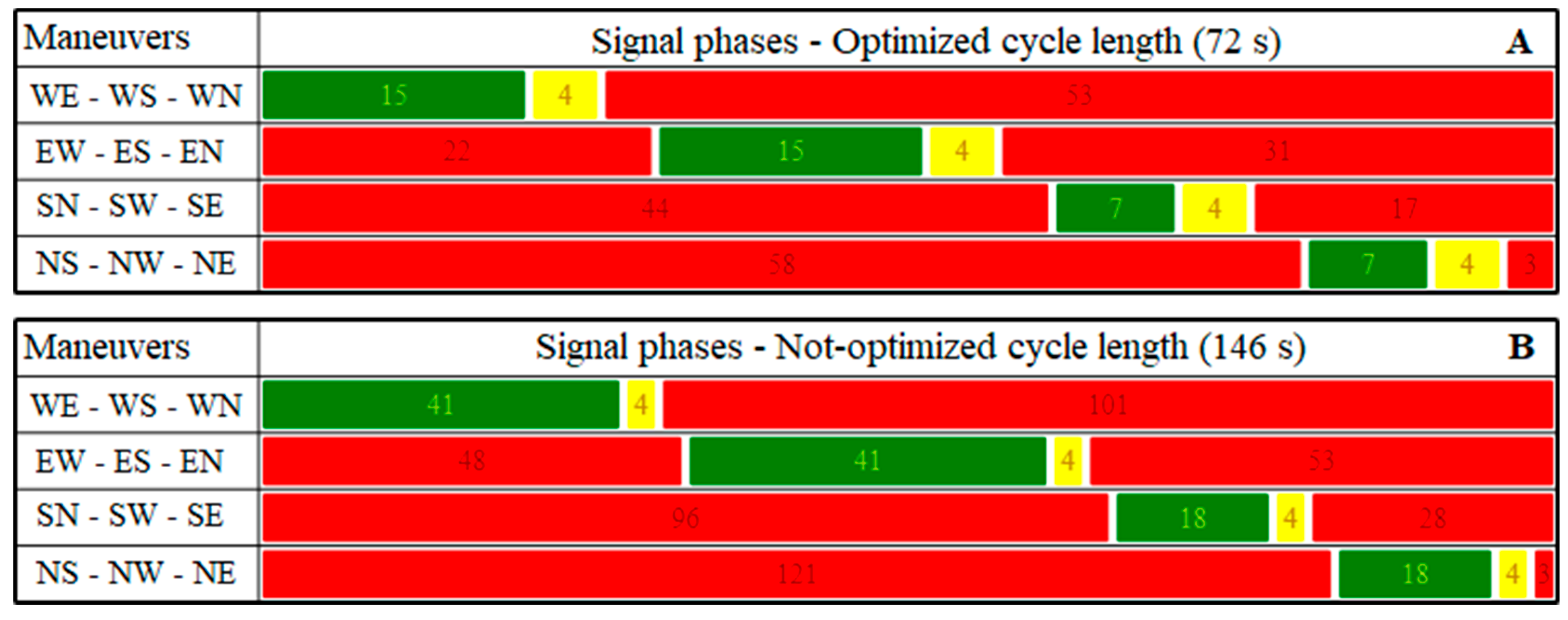
Two basic signal settings have been used as reference for the algorithm as in Figure 7.
The static traffic light setting A was established, according to the HCM 2010 methodology, for peak traffic and a 70/30 distribution of flows, while the second setting B is the optimum for the same configuration but with double total traffic. The B signal setting variant was created to evaluate the hypothesis in which the traffic light system is poorly regulated, in the first place, to assess how the FCD-based algorithm system automatically works to improve the way green is established.
A preliminary analysis was carried out based on the evaluation of the Ratio of Travel Time Saving (RTTS) both for “connected” and “not connected” vehicles expressed as follows:
where RTTSC is the Ratio of Travel Time Saving for “connected” vehicles; RTTSNC is the Ratio of Travel Time Saving for “not-connected” vehicles; TTO is the overall average travel time of the intersection four entry links (including service time) assuming that no vehicles are “connected” (no regulation of the traffic signal is applied); RTTSC is the Ratio of Travel Time Saving for “connected” vehicles and TTC(p) is the average travel time of the “connected” vehicles of the entry links of the intersection (including service time) assuming that penetration rate of “connected” vehicles is p.
Simulations were performed by varying the percentage of “connected” vehicles, also to establish which is, for this specific scenario, the minimum number of “connected” vehicles needed to have an optimal regulation. For this reason the same scenario was replicated by simulating different percentages of “connected” vehicles from 5% to 100% in increments of 5%.
3.1. Competition-Cooperation Diagrams
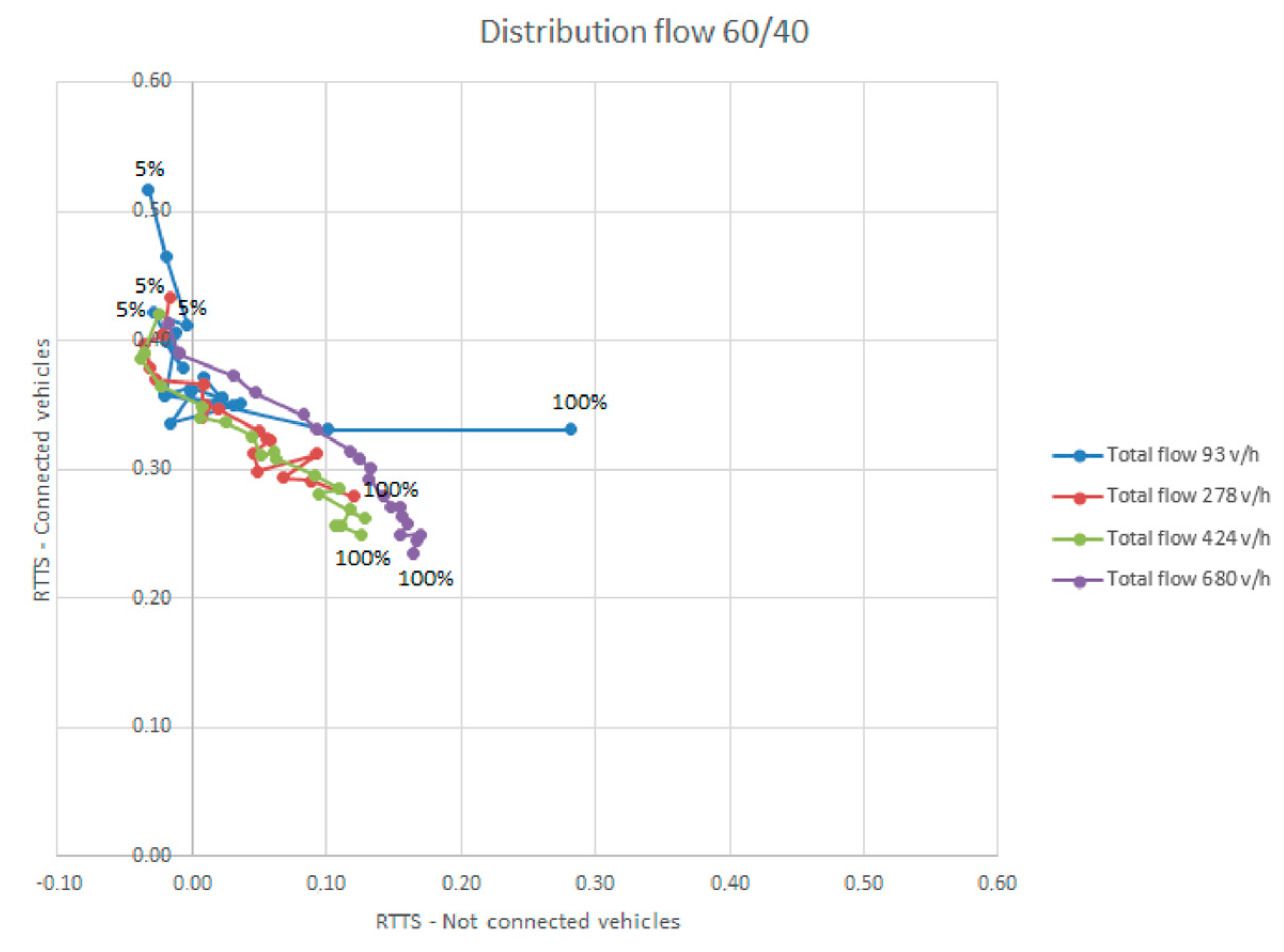
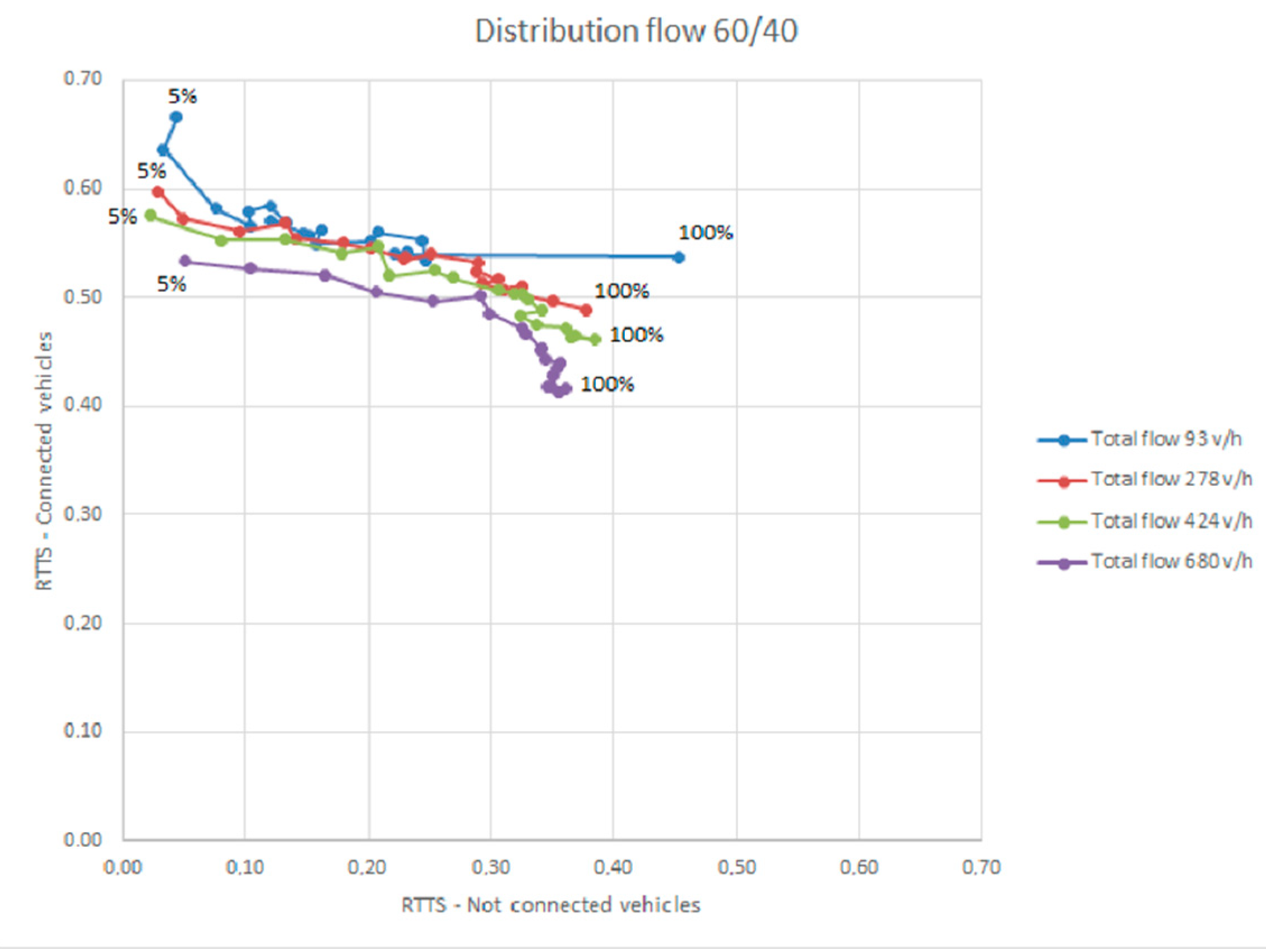
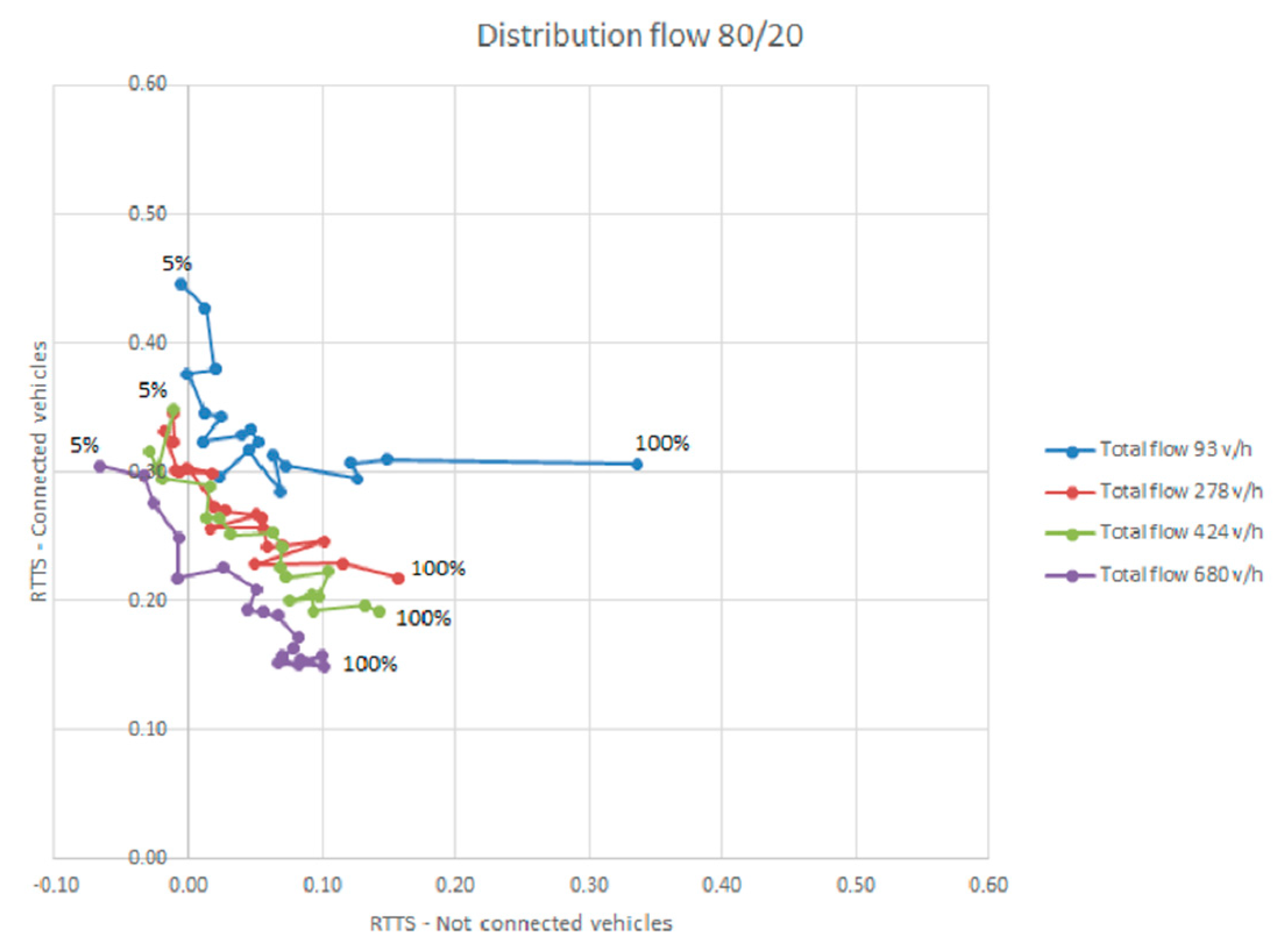
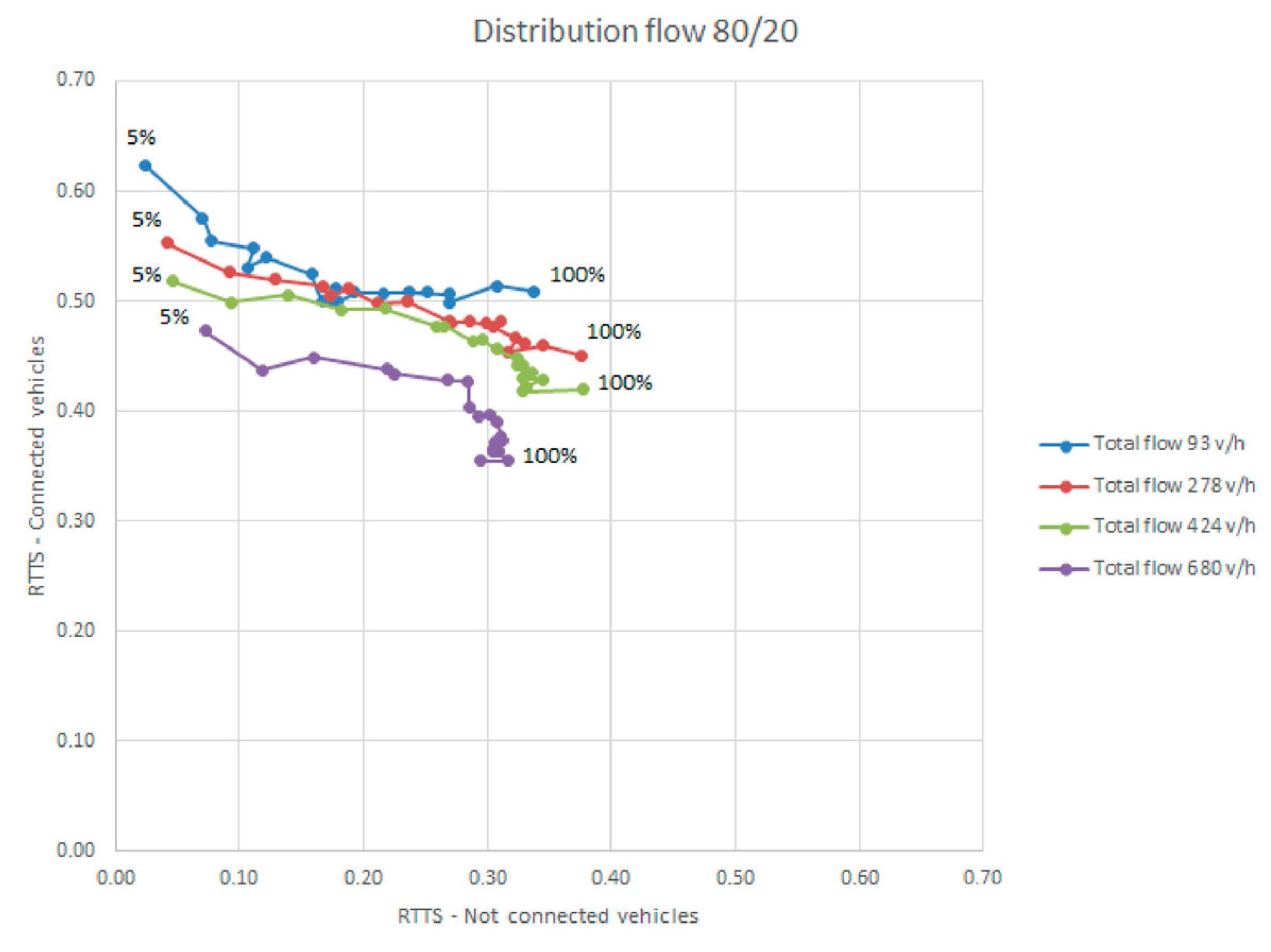
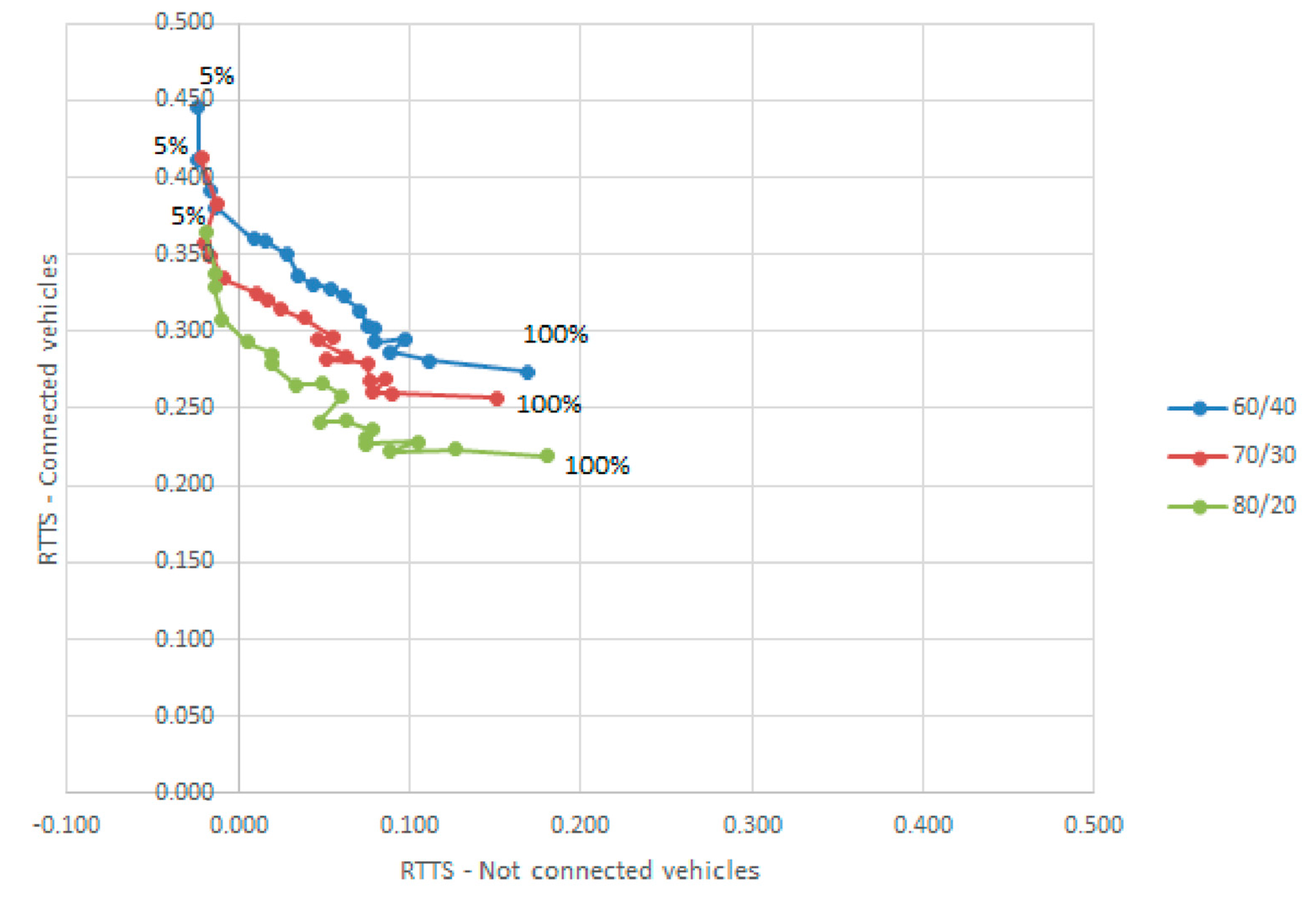
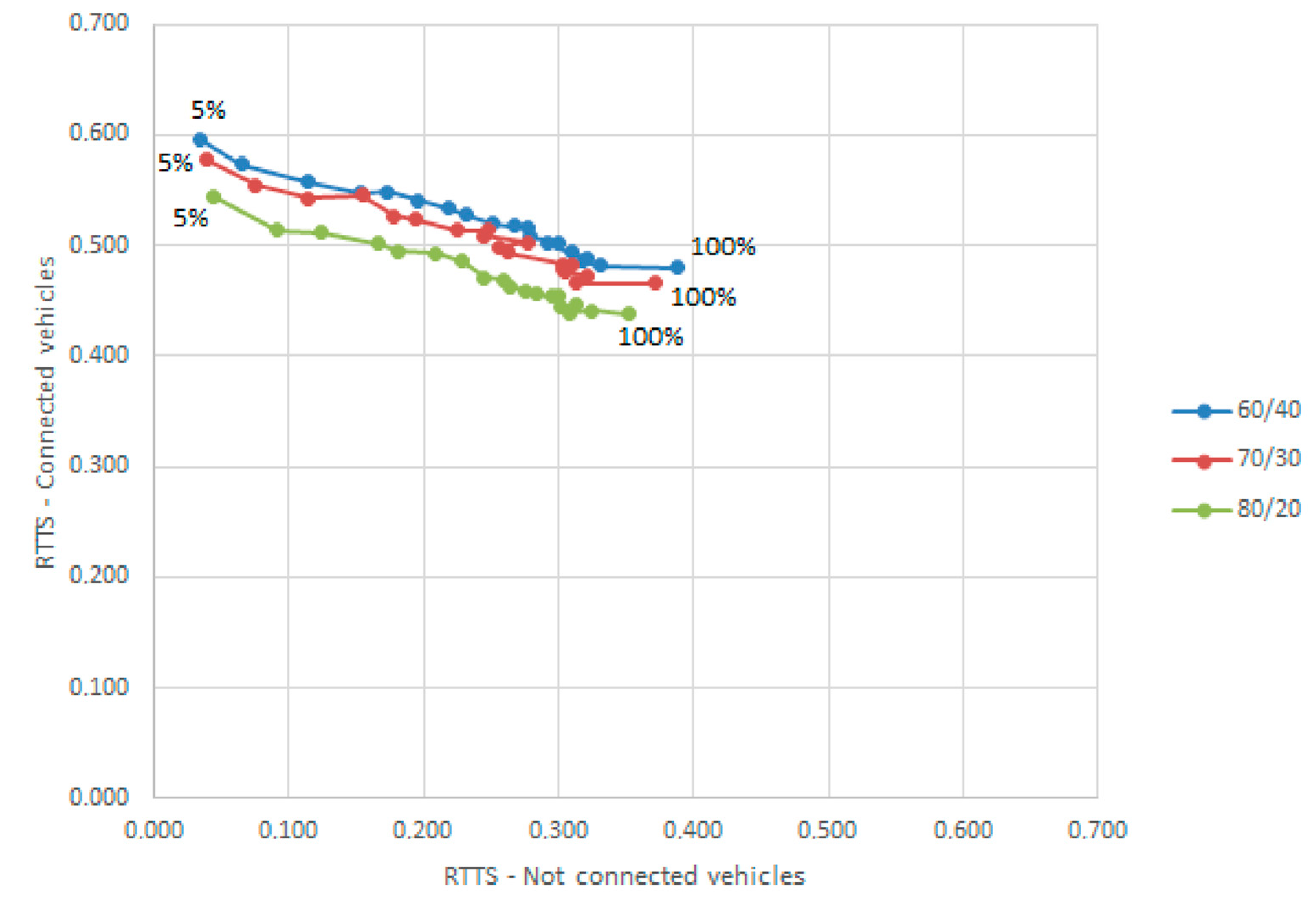
In the following Figure 8, Figure 9, Figure 10 and Figure 11 results in terms of “coopetition” diagram (above defined) are presented. Four different values of total flow and three different directional distributions were considered for Cases A and B (20 repetitions of each scenario were performed) for each percentage of “connected” vehicles (21 different cases) for a total number of 10.080 simulations (20 repetitions of each scenario were performed).
For the sake of brevity only results relative to a directional flow distribution 60/40 and 80/20 are presented in Figure 8, Figure 9, Figure 10 and Figure 11 for Cases A and B. Results show that the FCDATS systems always impact positively on Travel Time Saving of “connected” vehicles especially in Case B where confrontation is carried on in a inefficiently regulated intersection.
It should be noted that the marginal utility of “connected” vehicles, expressed in terms of Travel Time Saving, decreases with the increasing in the percentage of “connected” vehicles, in all cases (when the percentage of users is low they get a substantial advantage which in most cases is at least over 30% of average time saving, when percentage increases this differential advantage tends to fade).
In Case A (Figure 8 and Figure 10), no travel time saving (TTS) is observed for “not-connected” vehicles when the percentage of “connected” vehicles is less than 20%. With a low percentage of “connected” vehicles the situation is that of a clear competition between “connected” vehicles and “not connected” vehicles, “connected” vehicles are taking green time away from “not connected” vehicles and the points in the “coopetition” diagram are on the left of the y axis. This disadvantage for “not connected” vehicles disappears when more vehicles become “connected”. The marginal utility of the “not-connected” vehicles increases for all simulated scenarios with an increase of “connected” vehicles”.
On the other hand, when the basic traffic light cycle is inefficiently regulated, in the first place (traffic light Cycle B), “not-connected” vehicles benefit from an improvement in travel times even in the presence of very low percentages of “connected vehicles” both for balanced distributions and for unbalanced distributions of traffic volumes on the main and the secondary directions (Figure 9 and Figure 11). Overall, we can observe an improved optimization of travel times through the proposed FCDATS compared to static-flows based regulated traffic light cycles (i.e., traffic light Cycle A).
It should be noted that FCDATS advantages seems to decrease with the increase in total flow. In most cases (also with flow distribution 70/30 which is not in presented in the figures), the curves in the “coopetition” diagram shift left and down when the intersection is more saturated (total flow increasing). The only exception we found in our simulation is in case A with a 60/40 distribution of flow.
3.2. Average Results of a Typical Day
Results based on averaging the simulation for a typical day are based on the distribution of total flows of Figure 6 as in Table 2 (a typical day is composed of 24 h of simulation with flows that are distributed as in the above presented Figure 6):
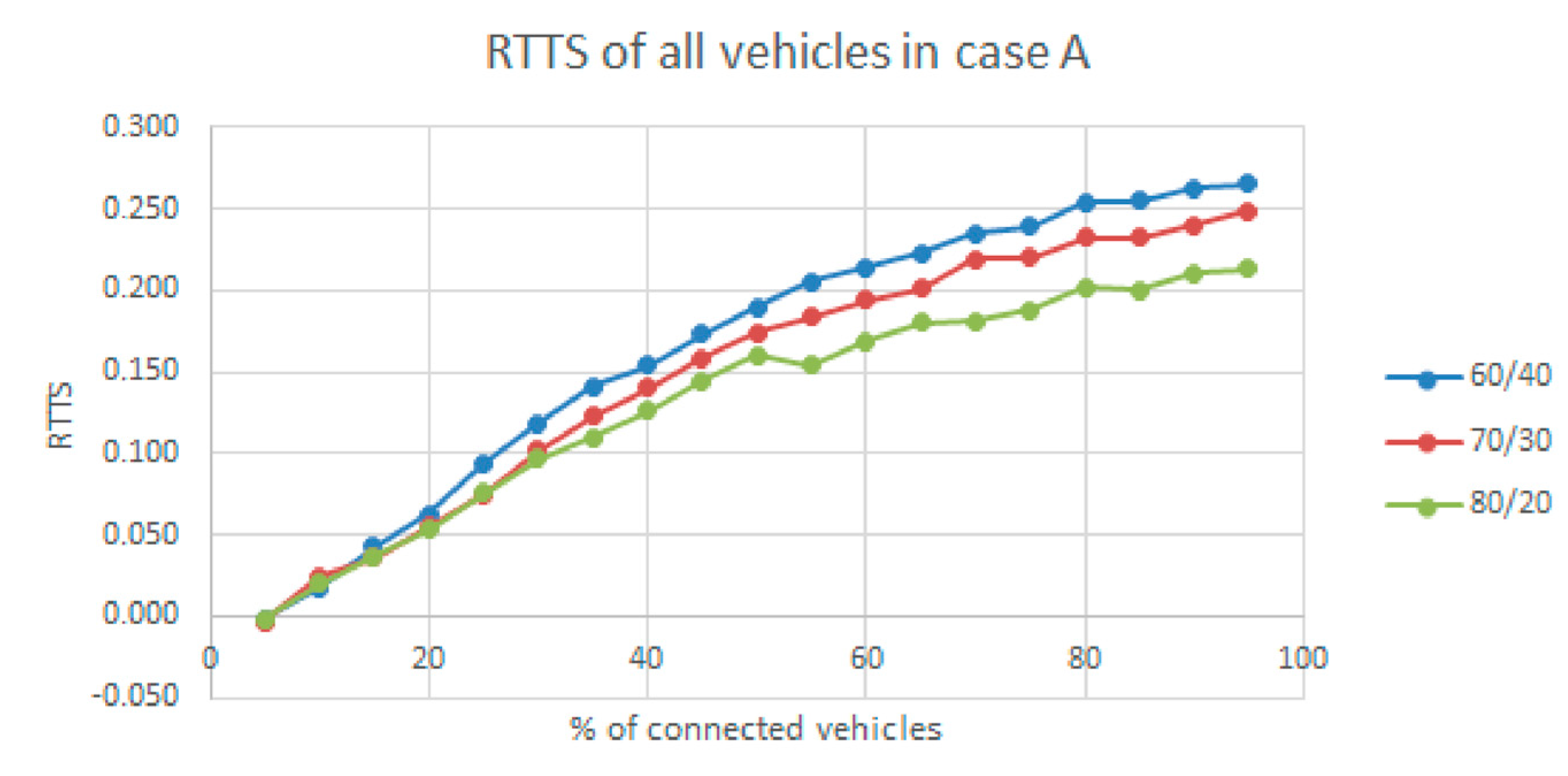
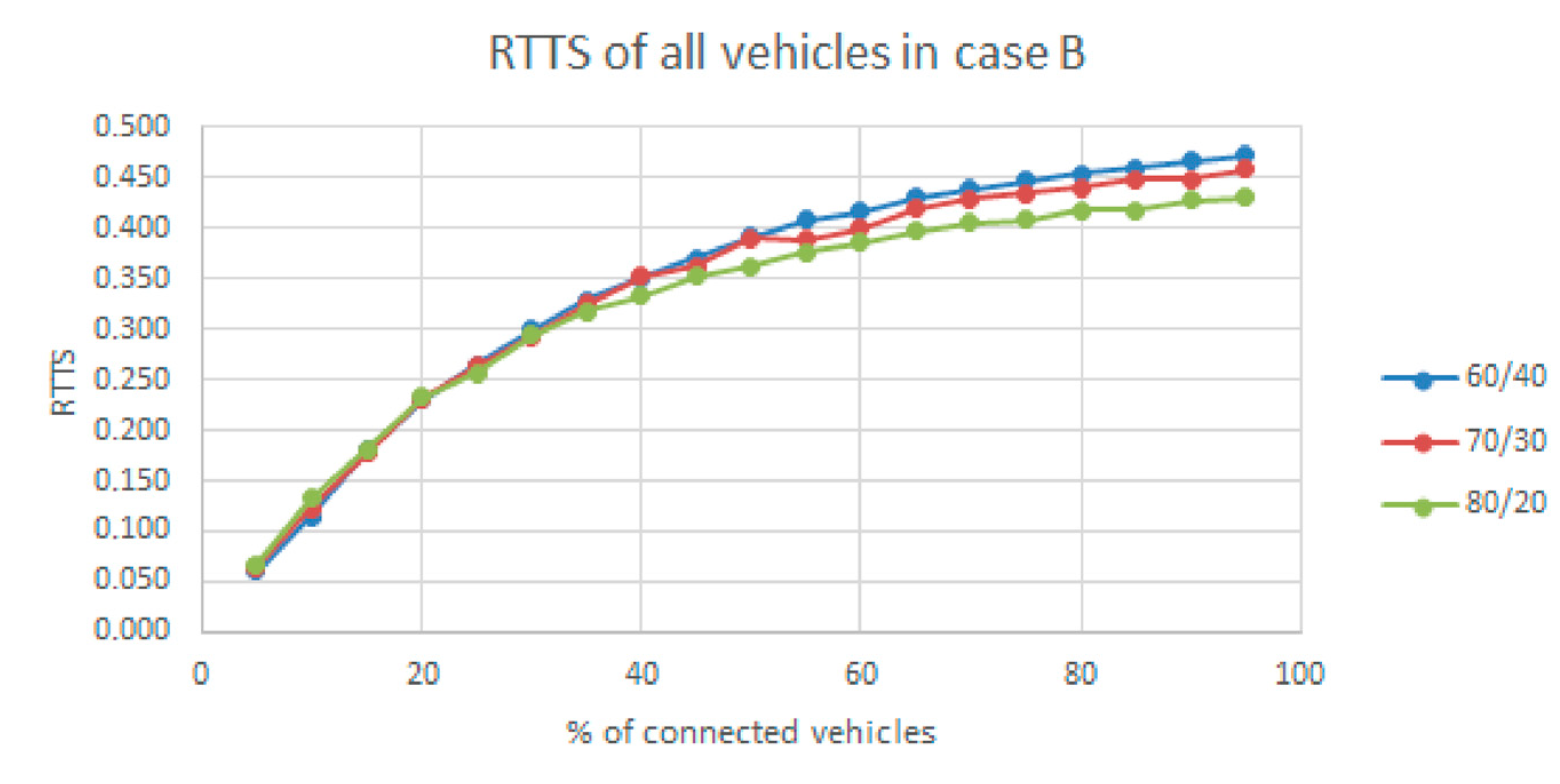
The results of Table 3 and Table 4 are also presented in Figure 12 and Figure 13 in terms of RTTS for all vehicles as a function of percentage of “connected” vehicles.
FCDATS show a general reduction in travel times, fuel consumption and pollutant emissions in all scenarios compared with values obtained from static signal regulation. Table 3, Table 4, Table 5, Table 6, Table 7, Table 8, Table 9 and Table 10 show that FCDATS perform better in Case A than in Case B in terms of absolute values when the percentage of “connected” vehicles is equal or less than 50%. This happens since the initial conditions are different. The algorithm in Case A is based on a properly calculated static reference signal cycle. The algorithm in cases where there are no “connected” vehicles, at the intersection, falls back on this basic static reference cycle and this means that in the scenarios of Case B sometime the wrong static reference signal cycle is applied bringing higher travel times and lower performances. This problem disappears when the percentage of connected vehicles is 75% or 100% since there would be fewer situations where the algorithm cannot rely on “connected” vehicles to adjust signal phases.
Improvements of FCDATS with respect to the static cycle derive mainly from the reduction in travel time on the links entering the intersection, but also from the reduced number of stop-and-go events near the traffic light, which consequently reduces the number of sudden braking and deceleration/acceleration.
The overall results compared to the static reference signal cycle are positive in all cases showing that FCDATS system can be implemented with benefit in all situations. The expected performances are to a larger extent better at intersections where the static signal cycle is not well established. The following Table 9 and Table 10 show the average values of NOx pollution:
3.3. Average Results of a Typical Day in Terms of Competition-Cooperation
The competition-cooperation diagram was calculated in Section 3.1 for some specific cases. This section shows results for the average day considering an intersection which has a fixed signal cycle for all day. Averaging travel times over all the day was done to evaluate real competition-cooperation in the common situation where traffic signals keep the same regulation during the day without adjusting to changing conditions. Figure 14 and Figure 15 show RTTS for “connected” and not “connected” vehicles in the “coopetition” diagram. Results show that at intersections where the cycle is correctly calculated (Figure 14) there is some competition for lower values of the percentage of “connected” vehicles. Connected vehicles are obtaining better travel times on a daily average at the expense of not “connected” vehicles. When the percentage of “connected” vehicles goes over 30% in all cases the effects of competition disappear since RTTS becomes positive also for not “connected” vehicles.
Results for the intersection, which is starting from an improper signal cycle, are instead always positive also for not “connected” vehicles, RTTS is always positive for both categories of vehicles as shown in Figure 15.
4. Discussion
The paper gives a first assessment of the penetration rate of “instrumented” vehicles that is necessary in order to obtain a good real time regulation in an FCDATS system and on the meaning of competition-cooperation in such a system.
This work is based on realistic assumptions on the control infrastructure and the quality of data that can be obtained from FCD. After experimenting for 15 years with mobile phones localization data we developed a dedicated Microsimulation Lab. The lab was developed specifically to test FCDATS algorithm with realistic assumptions on data quality that can be obtained from the field. For this reason one key element in our procedure is the introduction of a localization error and the consequent map-matching algorithm. Most research works on ITS assume the exact positioning of vehicle which is not necessary true. Moreover, everything that was done in this paper can be easily introduced in the field with standard mobile phone devices on vehicles.
The choice of microsimulation to test algorithms has a long historical background: traffic signal regulation has been verified and evaluated in simulation since the well-known Webster formula for delays which was evaluated in 1966 with the first computer traffic simulations.
Results of the simulations show a good performance of the simple implemented greedy algorithm even with a low percentage of “instrumented” vehicles: even on a well-regulated intersection (case A) FCDATS always improve traffic performances and can improve up to 25% travel time savings and reduce up to 10% fuel consumption and pollutant emissions. The disadvantages for not “connected” vehicles are contained and are an issue only in some cases and for a low percentage of “connected” vehicles. A driver who would choose to adopt these systems would compete with not “connected” vehicles only when the system is in its very initial start-up phase. As more and more drivers accept these systems they would cooperate also with not “connected” drivers for an improved general traffic signal regulation
All other performance measures, in terms of average travel time, fuel consumption and pollutant emissions, improved compared to the values of the original static signal cycle. Some level of competition among different classes of vehicles was revealed in some of the scenarios. Vehicles which are not “connected” may suffer disadvantages in terms of travel time with traffic regulation from FCDATS, for the benefit of “connected” vehicles, especially when the percentage of connected vehicles and the total flow at intersection is low.
General results prove that FCDATS systems can be an effective new solution, among smart city innovations, to increase transportation sustainability.
The algorithm used in the simulation is one of the very few control algorithms for FCDATS presented in the literature. It is a simple algorithm that allows other researchers to reproduce results. Future research efforts can be dedicated to developing specific algorithms to apply in more complex specific cases.
The work presented in this paper represents the first approach to analyze the traffic light regulation of a four legs intersection using FCDATS in terms of cooperation-competition. Future research efforts can also be devoted to test more general optimization algorithms in terms of cooperation-competition once new algorithms will be formalized so to perform a good regulation in FCDATS. Genetic algorithms may be a candidate for a superior solution to the problem given the complications involved that do not allow a simple analytical representation.
5. Conclusions
The competition between “connected” vehicles and not “connected” vehicles is a real problem which could hold back the use of innovative traffic signal regulation systems based on Floating Car Data. This paper has shown that practically, in all simulated scenarios of a single intersection, the advantages for the community of the introduction of FCDATS compared with traditional fixed time regulation are in terms of reduced consumption, reduced pollutant emissions and reduced travel time. The paper, however, does not analyses more complex intersection configurations and different levels of service (i.e., asymmetric approaching roads, higher traffic volumes, uneven turning manoeuvres, etc.). Furthermore, a simple greedy algorithm is applied to optimize the traffic settings based on FCD in order to demonstrate the advantages of the proposed system into a simulated environment. In this way, the authors investigated the validity of urban traffic regulation systems based on connected vehicles, regardless of the technology used, but limited to a simulated scenarios.
More efforts have to be spent to implement the proposed system in a real context and evaluate its reliability by using an integrated hardware/software platform which allows the drivers to connect themselves to the traffic control system through their smartphones. As GNSS-embedded smartphones are widespread, especially in traffic congested areas, as previously described, they can be used as FCD to optimize travel times and queue lengths not only for isolated intersections, but also for wider areas including several traffic lights.
Author Contributions
V.A. was responsible for conceptualization and methodology, V.P.G. carried on the computer lab implementations, G.G. and A.V. performed supervision, review and editing.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Schubert, R.; Schlingelhof, M.; Cramer, H.; Wanielik, G. Accurate positioning for vehicular safety applications—The SAFESPOT approach. In Proceedings of the IEEE 66th Vehicular Technology Conference, Baltimore, MD, USA, 3 October 2007. [Google Scholar]
- Benmimoun, M.; Zlocki, A.; Eckstein, L. Advanced Driver Assistance Systems: Benefit Evaluation Method and User Acceptance for Adaptive Cruise Control and Collision Warning System. In Proceedings of the Transportation Research Board 91st Annual Meeting, Washington, DC, USA, 22–26 January 2012. [Google Scholar]
- Stahlmann, R.; Festag, A.; Tomatis, A.; Radusch, I.; Fischer, F. Starting European Field Tests for Car-2-X Communication: The Drive C2X Framework. In Proceedings of the 18th ITS World Congress and Exhibition, Toyota, Japan, 12 October 2011. [Google Scholar]
- Jahangiri, A.; Rakha, H.; Dingus, T.A. Red-light running violation prediction using observational and simulator data. Accid. Anal. Prev. 2016. [Google Scholar] [CrossRef] [PubMed]
- Cassini, M. NO IDLE MATTER: How signal-controlled traffic could be doing more harm than good. Traffic Technology International, October/November 2007; pp. 50–59. [Google Scholar]
- Steve Huntingford Traffic Lights Cause More Harm than Good. Available online: https://www.telegraph.co.uk/cars/comment/traffic-lights-cause-more-harm-than-good/ (accessed on 12 October 2018).
- Cassini, M. Traffic lights: Weapons of mass distraction, danger and delay. Econ. Aff. 2010. [Google Scholar] [CrossRef]
- Cassini, M. In your car no one can hear you scream! Are traffic controls in cities a necessary evil? Econ. Aff. 2006. [Google Scholar] [CrossRef]
- Astarita, V.; Florian, M. The use of mobile phones in traffic management and control. In Proceedings of the 2001 IEEE Intelligent Transportation Systems (ITSC 2001). Proceedings (Cat. No.01TH8585), Oakland, CA, USA, 25–29 August 2001. [Google Scholar] [CrossRef]
- Astarita, V.; Bertini, R.L.; d’Elia, S.; Guido, G. Motorway traffic parameter estimation from mobile phone counts. Eur. J. Oper. Res. 2006, 175. [Google Scholar] [CrossRef]
- Barceló, J.; Montero, L.; Marqués, L.; Carmona, C. Travel Time Forecasting and Dynamic Origin-Destination Estimation for Freeways Based on Bluetooth Traffic Monitoring. Transp. Res. Rec. J. Transp. Res. Board 2010. [Google Scholar] [CrossRef]
- Barceló, J.; Montero, L.; Bullejos, M.; Serch, O.; Carmona, C. A kalman filter approach for exploiting bluetooth traffic data when estimating time-dependent od matrices. J. Intell. Transp. Syst. Technol. Plan. Oper. 2013. [Google Scholar] [CrossRef]
- Guido, G.; Vitale, A.; Saccomanno, F.F.; Festa, D.C.; Astarita, V.; Rogano, D.; Gallelli, V. Using Smartphones as a Tool to Capture Road Traffic Attributes. Appl. Mech. Mater. 2013. [Google Scholar] [CrossRef]
- Guido, G.; Gallelli, V.; Saccomanno, F.; Vitale, A.; Rogano, D.; Festa, D. Treating uncertainty in the estimation of speed from smartphone traffic probes. Transp. Res. Part C Emerg. Technol. 2014. [Google Scholar] [CrossRef]
- Herrera, J.C.; Work, D.B.; Herring, R.; Ban, X.; Jacobson, Q.; Bayen, A.M. Evaluation of traffic data obtained via GPS-enabled mobile phones: The Mobile Century field experiment. Transp. Res. Part C Emerg. Technol. 2010. [Google Scholar] [CrossRef]
- Chen, W.J.; Chen, C.H.; Lin, B.Y.; Lo, C.C. A traffic information prediction system based on Global Position System-equipped probe car reporting. Adv. Sci. Lett. 2012. [Google Scholar] [CrossRef]
- Zhou, X.; Wang, W.; Yu, L.; Zhou, X.; Yu, Á.L.; Wang, W.; Lu, W. Traffic Flow Analysis and Prediction Based on GPS Data of Floating Cars. In Lecture Notes in Electrical Engineering; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Guido, G.; Vitale, A.; Astarita, V.; Saccomanno, F.; Giofré, V.P.; Gallelli, V. Estimation of Safety Performance Measures from Smartphone Sensors. Procedia Soc. Behav. Sci. 2012. [Google Scholar] [CrossRef]
- Bierlaire, M.; Chen, J.; Newman, J.P. Modeling Route Choice Behavior From Smartphone GPS Data; Report TRANSP-OR 101016; Transport and Mobility Laboratory, School of Architecture, Civil and Environmental Engineering, Ecole Polytechnique Fédérale de Lausanne: Lausanne, Switzerland, 2010. [Google Scholar]
- Händel, P.; Ohlsson, J.; Ohlsson, M.; Skog, I.; Nygren, E. Smartphone-based measurement systems for road vehicle traffic monitoring and usage-based insurance. IEEE Syst. J. 2014. [Google Scholar] [CrossRef]
- Astarita, V.; Caruso, M.V.; Danieli, G.; Festa, D.C.; Giofrè, V.P.; Iuele, T.; Vaiana, R. A Mobile Application for Road Surface Quality Control: UNIquALroad. Procedia Soc. Behav. Sci. 2012. [Google Scholar] [CrossRef]
- Vaiana, R.; Iuele, T.; Astarita, V.; Caruso, M.V.; Tassitani, A.; Zaffino, C.; Giofrè, V.P. Driving behavior and traffic safety: An acceleration-based safety evaluation procedure for smartphones. Mod. Appl. Sci. 2014, 8. [Google Scholar] [CrossRef]
- Astarita, V.; Guido, G.; Mongelli, D.; Giofrè, V.P. A co-operative methodology to estimate car fuel consumption by using smartphone sensors. Transport 2015, 30. [Google Scholar] [CrossRef]
- Gap Analysis in Cooperative Systems within Intelligent Transportation Systems; Royal Institute of Technology: Stockholm, Sweden, 2012.
- Paul, A.; Daniel, A.; Ahmad, A.; Rho, S. Cooperative cognitive intelligence for internet of vehicles. IEEE Syst. J. 2017. [Google Scholar] [CrossRef]
- Daniel, A.; Subburathinam, K.; Paul, A.; Rajkumar, N.; Rho, S. Big autonomous vehicular data classifications: Towards procuring intelligence in ITS. Veh. Commun. 2017. [Google Scholar] [CrossRef]
- Newell, G.F. Traffic Signal Synchronization For High Flows On A Two-Way Street. In Itte Calif Univ Research Reports; The National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 1967. [Google Scholar]
- Bavarez, E.; Newell, G.F. Traffic Signal Synchronization on a One-Way Street. Transp. Sci. 1967, 1, 55–73. [Google Scholar] [CrossRef]
- Hillier, J.A.; Rothery, R. The Synchronization of Traffic Signals for Minimum Delay. Transp. Sci. 1967, 1, 81–94. [Google Scholar] [CrossRef]
- Gartner, N. Optimal synchronization of traffic signal networks by dynamic programming. In Traffic Flow and Transportation; The National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 1972. [Google Scholar]
- Sims, A.G.; Dobinson, K.W. The Sydney Coordinated Adaptive Traffic (SCAT) System Philosophy and Benefits. IEEE Trans. Veh. Technol. 1980. [Google Scholar] [CrossRef]
- Robertson, D.I.; Bretherton, R.D. Optimizing Networks of Traffic Signals in Real Time—The SCOOT Method. IEEE Trans. Veh. Technol. 1991. [Google Scholar] [CrossRef]
- Sehgal, V.K.; Dhope, S.; Goel, P.; Chaudhry, J.S.; Sood, P. An embedded platform for intelligent traffic control. In Proceedings of the UKSim 4th European Modelling Symposium on Computer Modelling and Simulation, EMS2010, Pisa, Italy, 17–19 November 2010. [Google Scholar]
- Faye, S.; Chaudet, C.; Demeure, I. A Distributed Algorithm for Multiple Intersections Adaptive Traffic Lights Control Using a Wireless Sensor Networks. In Proceedings of the first workshop on Urban networking, UrbaNe ’12, Nice, France, 10 December 2012. [Google Scholar]
- Clempner, J.B.; Poznyak, A.S. Modeling the multi-traffic signal-control synchronization: A Markov chains game theory approach. Eng. Appl. Artif. Intell. 2015. [Google Scholar] [CrossRef]
- Ilal Ghazal, B.; Eikhatib, K. Smart Traffic Light Control System. In Proceedings of the 2016 Third International Conference on Electrical, Electronics, Computer Engineering and Their Applications (EECEA), Beirut, Lebanon, 21–23 April 2016. [Google Scholar]
- Al-Khateeb, K.; Johari, J.A.Y. Intelligent dynamic traffic light sequence using RFID. In Proceedings of the 2008 International Conference on Computer and Communication Engineering, Kuala Lumpur, Malaysia, 13–15 May 2008. [Google Scholar] [CrossRef]
- Sharma, S.; Pithora, A.; Gupta, G.; Goel, M.; Sinha, M. Traffic Light Priority Control For Emergency Vehicle Using RFID. Int. J. Innov. Eng. Technol. 2013, 2, 363–366. [Google Scholar]
- Neumann, T. A Cost-Effective Method for the Detection of Queue Lengths at Traffic Lights. In Traffic Data Collection and its Standardization; Springer: New York, NY, USA, 2010; pp. 151–160. [Google Scholar]
- Kerper, M.; Wewetzer, C.; Sasse, A.; Mauve, M. Learning traffic light phase schedules from velocity profiles in the cloud. In Proceedings of the 2012 5th International Conference on New Technologies, Mobility and Security (NTMS), Istanbul, Turkey, 7–10 May 2012. [Google Scholar]
- Axer, S.; Friedrich, B. Level of service estimation based on low-frequency floating car data. Transp. Res. Procedia 2014, 3, 1051–1058. [Google Scholar] [CrossRef]
- Axer, S.; Friedrich, B. Estimating signal phase and timing for traffic actuated intersections based on low frequency floating car data. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, ITSC, Rio de Janeiro, Brazil, 1–4 November 2016. [Google Scholar]
- Gordon, J. Talking to traffic signal. Traffic Technology International, October/November 2016; pp. 52–54. [Google Scholar]
- Astarita, V.; Giofrè, V.P.; Guido, G.; Vitale, A. The use of adaptive traffic signal systems based on floating car data. Wirel. Commun. Mob. Comput. 2017, 2017. [Google Scholar] [CrossRef]
- Axer, S.; Pascucci, F. Estimation of traffic signal timing data and total delay for urban intersections based on low frequency floating car data. In Proceedings of the 6th mobility TUM (2015), Munich, Germany, 30 June–1 July 2015. [Google Scholar]
- Wendlandt, K.; Khider, M.; Angermann, M.; Robertson, P. Continuous location and direction estimation with multiple sensors using particle filtering. In Proceedings of the 2006 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems, Heidelberg, Germany, 3–6 September 2006. [Google Scholar]
- Angermann, M.; Kammann, J.; Robertson, P.; Steingaß, A. Software representation for heterogeneous location data sources using probability density functions. In Proceedings of the International Symposium on Location Based Services for Cellular Users (LOCELLUS 2001), Munich, Germany, 5–7 February 2001. [Google Scholar]
- Ochieng, W.; Sauer, K. Urban road transport navigation: Performance of the global positioning system after selective availability. Transp. Res. Part C Emerg. Technol. 2002. [Google Scholar] [CrossRef]
- Wang, B. Application of Smartphone for Intersection Performance Measurement. Master’s Thesis, Civil Engineering, University of Akron, Akron, OH, USA, 2011. [Google Scholar]
- Zandbergen, P.A. Accuracy of iPhone locations: A comparison of assisted GPS, WiFi and cellular positioning. Trans. GIS 2009, 13, 5–25. [Google Scholar] [CrossRef]
- Zandbergen, P.A.; Barbeau, S.J. Positional accuracy of assisted GPS data from high-sensitivity GPS-enabled mobile phones. J. Navig. 2011. [Google Scholar] [CrossRef]
- Zhang, J.; Li, B.; Dempster, A.G.; Rizos, C. Evaluation of High Sensitivity GPS Receivers. In Proceedings of the 2010 International Symposium on GPS/GNSS, Taipei, Taiwan, 26–28 October 2010. [Google Scholar]
- Bar Hillel, A.; Lerner, R.; Levi, D.; Raz, G. Recent progress in road and lane detection: A survey. Mach. Vis. Appl. 2014. [Google Scholar] [CrossRef]
- Zhao, X. On processing GPS tracking data of spatio-temporal car movements: A case study. J. Locat. Based Serv. 2015. [Google Scholar] [CrossRef]
- Fouque, C.; Bonnifait, P. Matching raw GPS measurements on a navigable map without computing a global position. IEEE Trans. Intell. Transp. Syst. 2012. [Google Scholar] [CrossRef]
- Farrell, J.; Givargis, T. Differential GPS reference station algorithm-design and analysis. IEEE Trans. Control Syst. Technol. 2000. [Google Scholar] [CrossRef]
- Du, J.D.J.; Barth, M. Bayesian Probabilistic Vehicle Lane Matching for Link-Level In-Vehicle Navigation. In Proceedings of the 2006 IEEE Intelligent Vehicles Symposium, Tokyo, Japan, 13–15 June 2006. [Google Scholar] [CrossRef]
- Moon, S.-C.; Kim, B.-S.; Kim, J.-J.; Lee, S.-G. Discrimination of Traffic Lane Departure Based on GIS Using DGPS. In Proceedings of the 17th ITS World Congress, Busan, Korea, 25–29 October 2010. [Google Scholar]
- Basnayake, C.; Lachapelle, G.; Bancroft, J. Relative Positioning for Vehicle-to-Vehicle Communications-Enabled Vehicle Safety Applications. In Proceedings of the 18th ITS World Congress, Orlando, FL, USA, 16–20 October 2011. [Google Scholar]
- Sekimoto, Y.; Matsubayashi, Y.; Yamada, H.; Imai, R.; Usui, T.; Kanasugi, H. Lightweight lane positioning of vehicles using a smartphone GPS by monitoring the distance from the center line. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, ITSC, Anchorage, AK, USA, 16–19 September 2012. [Google Scholar]
- Marinelli, M.; Palmisano, G.; Astarita, V.; Ottomanelli, M.; Dell’Orco, M. A Fuzzy set-based method to identify the car position in a road lane at intersections by smartphone GPS data. Transp. Res. Procedia 2017, 27. [Google Scholar] [CrossRef]
- Vittorio, A.; Demetrio Carmine, F.; Vincenzo Pasquale, G. Cooperative-competitive paradigm in traffic signal synchronization based on floating car data. In Proceedings of the International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Palermo, Italy, 12–15 June 2018. [Google Scholar]
- Cipolla, C.M. Allegro Ma non Troppo; Il Mulino: Bologna, Italy, 1988; ISBN 978-88-15-01980-6. [Google Scholar]
- Giofre, V.P.; Astarita, V.; Guido, G.; Vitale, A. Localization issues in the use of ITS. In Proceedings of the 5th IEEE International Conference on Models and Technologies for Intelligent Transportation Systems, MT-ITS 2017, Skiathos Island, Greece, 26–28 June 2017. [Google Scholar]
- Webster, F.V. Traffic Signal Settings; Road Res. Tech. Pap. No.39; Road Reserch Lab: London, UK, 1958. [Google Scholar]
- Qian, R.; Lun, Z.; Wenchen, Y.; Meng, Z. A Traffic Emission-saving Signal Timing Model for Urban Isolated Intersections. Procedia Soc. Behav. Sci. 2013. [Google Scholar] [CrossRef]
- Vilarinho, C.; Tavares, J.P.; Rossetti, R.J.F. Intelligent Traffic Lights: Green Time Period Negotiaton. In Transportation Research Procedia; Elsevier: New York, NY, USA, 2017. [Google Scholar]
- Suphasawas, N.; Hussein, D. Evaluation of a Dynamic Signal Optimisation Control Model Using Traffic Simulation. IATSS Res. 2005. [Google Scholar] [CrossRef]
- Astarita, V.; Guido, G.; Vitale, A.; Giofré, V. A new microsimulation model for the evaluation of traffic safety performances. Eur. Transp. Trasp. Eur. 2012. [Google Scholar] [CrossRef]
- Guido, G.; Astarita, V.; Giofré, V.; Vitale, A. Safety performance measures: A comparison between microsimulation and observational data. Procedia Soc. Behav. Sci. 2011, 20, 217–225. [Google Scholar] [CrossRef]
- Giofrè, V.P.; Maciejewski, M.; Merkisz-Guranowska, A.; Piątkowski, B.; Astarita, V. Real road network application of a new microsimulation tool: TRITONE. Arch. Transp. 2013, 27–28. [Google Scholar] [CrossRef]
- PTV. PTV Planung Transport Verkehr; VISSIM User Manual Version 7.0; PTV: Melbourne, Australia, 2014. [Google Scholar]
- Gallelli, V.; Iuele, T.; Vaiana, R.; Vitale, A. Investigating the transferability of calibrated microsimulation parameters for operational performance analysis in roundabouts. J. Adv. Transp. 2017, 2017. [Google Scholar] [CrossRef]
- Int Panis, L.; Broekx, S.; Liu, R. Modelling instantaneous traffic emission and the influence of traffic speed limits. Sci. Total Environ. 2006. [Google Scholar] [CrossRef] [PubMed]
- Akcelik, R. Progress in Fuel Consumption Modelling for Urban Traffic Management; Australian Road Research Board: Melbourne, Australia, 1983; ISBN 0 86910 123 4. [Google Scholar]
- TRB Highway Capacity Manual; Transporation Reserch Board: Washingt, DC, USA, 2010; pp. 1–4.
Figure 1.
An example of signalized intersection, where, exact lane position information would be useful for FCDATL systems (X symbolizes manoeuvres that cannot move in the current phase).
Figure 1.
An example of signalized intersection, where, exact lane position information would be useful for FCDATL systems (X symbolizes manoeuvres that cannot move in the current phase).

Figure 2.
Coopetition (competition-cooperation) diagram.

Figure 3.
Experimental scenarios.

Figure 4.
Traffic signal algorithms testing lab.

Figure 5.
Simulated road intersection.

Figure 6.
Daily flow for local route (in blue real data, in red the constant piecewise approximation that was used in the simulations).
Figure 6.
Daily flow for local route (in blue real data, in red the constant piecewise approximation that was used in the simulations).

Figure 7.
Traffic light Cycle A and B.

Figure 8.
Ratio of Travel Time Saving for traffic light cycle A (Distribution of flow 60/40).

Figure 9.
Ratio of Travel Time Saving for traffic light cycle B (Distribution of flow 60/40).

Figure 10.
Ratio of Travel Time Saving for traffic light cycle A (Distribution of flow 80/20).

Figure 11.
Ratio of Travel Time Saving for traffic light cycle B (Distribution of flow 80/20).

Figure 12.
RTTS for all vehicles in Case A.

Figure 13.
RTTS for all vehicles in Case B.

Figure 14.
Competition-Cooperation diagram on a daily base in Case A.

Figure 15.
Competition-Cooperation diagram on a daily base in Case B.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Car following parameters.
| Calibration Parameter | Value | Unit |
|---|---|---|
| Desired Speed (average) | 25.43 | (km/h) |
| Observed vehicles ahead | 4 | |
| CC0 | 0.50 | (m) |
| CC1 | 0.52 | (s) |
| CC2 | 2.21 | (m) |
| CC3 | −7.06 | |
| CC6 | 8.01 | |
| CC7 | 0.27 | |
| CC8 | 3.48 |
Table 2.
Distribution of daily flow.
| Flow (veh/h) | Hours |
|---|---|
| 93 | 6 |
| 278 | 6 |
| 424 | 8 |
| 680 | 4 |
Table 3.
Average travel time [sec.], in a typical day, for Case A.
| Total Daily Flow 8838 veh | % of GNSS Vehicles | |||||
|---|---|---|---|---|---|---|
| Distribution | Static Cycle | 10 | 25 | 50 | 75 | 100 |
| 60/40 | 47.42 | 46.60 [1.73] * | 42.97 [9.38] | 38.44 [18.94] | 36.06 [23.96] | 34.29 [27.69] |
| 70/30 | 46.25 | 45.13 [2.42] | 42.78 [7.50] | 38.18 [17.45] | 36.06 [22.03] | 34.88 [24.58] |
| 80/20 | 45.30 | 44.39 [2.01] | 41.88 [7.55] | 38.05 [16.00] | 36.79 [18.79] | 35.70 [21.19] |
* relative savings [%] compared to the static cycle.
Table 4.
Average travel time [sec.] in a typical day for Case B: inefficiently regulated intersection.
Table 4.
Average travel time [sec.] in a typical day for Case B: inefficiently regulated intersection.
| Total Daily Flow 8838 veh | % of GNSS Vehicles | |||||
|---|---|---|---|---|---|---|
| Distribution | Static Cycle | 10 | 25 | 50 | 75 | 100 |
| 60/40 | 65.14 | 58.41 [10.33] * | 47.90 [26.47] | 39.59 [39.22] | 35.97 [44.78] | 33.93 [47.91] |
| 70/30 | 63.90 | 57.00 [10.80] | 47.05 [39.01] | 38.97 [39.01] | 36.06 [43.57] | 34.56 [45.92] |
| 80/20 | 61.95 | 54.78 [11.57] | 46.05 [25.67] | 39.52 [36.21] | 36.62 [40.89] | 35.06 [43.41] |
* relative savings [%] compared to the static cycle.
Table 5.
Average fuel consumption [l/km], in a typical day, for Case A.
| Total Daily Flow 8838 veh | % of GNSS Vehicles | |||||
|---|---|---|---|---|---|---|
| Distribution | Static Cycle | 10 | 25 | 50 | 75 | 100 |
| 60/40 | 0.235 | 0.232 [1.28] * | 0.221 [5.96] | 0.209 [11.06] | 0.205 [12.77] | 0.200 [14.89] |
| 70/30 | 0.238 | 0.234 [1.68] | 0.225 [5.46] | 0.212 [10.92] | 0.208 [12.61] | 0.204 [14.29] |
| 80/20 | 0.240 | 0.236 [1.67] | 0.229 [4.58] | 0.218 [9.17] | 0.215 [10.42] | 0.212 [11.67] |
* relative savings [%] compared to the static cycle.
Table 6.
Average fuel consumption [l/km], in a typical day, for Case B.
| Total Daily Flow 8838 veh | % of GNSS Vehicles | |||||
|---|---|---|---|---|---|---|
| Distribution | Static Cycle | 10 | 25 | 50 | 75 | 100 |
| 60/40 | 0.276 | 0.257 [6.88] * | 0.229 [17.03] | 0.209 [24.28] | 0.201 [27.17] | 0.198 [28.26] |
| 70/30 | 0.280 | 0.259 [7.50] | 0.232 [17.14] | 0.213 [23.93] | 0.204 [27.14] | 0.201 [28.21] |
| 80/20 | 0.276 | 0.257 [6.88] | 0.234 [15.22] | 0.217 [21.38] | 0.211 [23.55] | 0.208 [24.64] |
* relative savings [%] compared to the static cycle.
Table 7.
Average CO2 pollution [g/km], in a typical day, for Case A.
| Total Daily Flow 8838 veh | % of GNSS Vehicles | |||||
|---|---|---|---|---|---|---|
| Distribution | Static Cycle | 10 | 25 | 50 | 75 | 100 |
| 60/40 | 89.946 | 89.373 [0.64] * | 85.875 [4.53] | 82.111 [8.71] | 81.424 [9.47] | 79.695 [11.4] |
| 70/30 | 91.566 | 90.957 [0.67] | 87.793 [4.12] | 84.334 [7.90] | 83.212 [9.12] | 81.402 [11.1] |
| 80/20 | 94.134 | 93.077 [1.12] | 90.909 [3.43] | 87.834 [6.69] | 86.957 [7.62] | 85.177 [9.52] |
* relative savings [%] compared to the static cycle.
Table 8.
Average CO2 pollution [g/km], in a typical day, for Case B.
| Total Daily Flow 8838 veh | % of GNSS Vehicles | |||||
|---|---|---|---|---|---|---|
| Distribution | Static Cycle | 10 | 25 | 50 | 75 | 100 |
| 60/40 | 102.795 | 97.619 [5.00] * | 89.392 [13.00] | 82.127 [20.10] | 80.126 [22.60] | 79.161 [23.00] |
| 70/30 | 106.503 | 99.765 [6.30] | 91.211 [14.40] | 85.744 [19.05] | 82.035 [23.00] | 80.865 [24.10] |
| 80/20 | 107.129 | 101.32 [5.40] | 93.110 [13.10] | 87.532 [18.03] | 85.710 [20.00] | 84.160 [21.40] |
* relative savings [%] compared to the static cycle.
Table 9.
Average NOx pollution [g/km], in a typical day, for Case A.
| Total Daily Flow 8838 veh | % of GNSS Vehicles | |||||
|---|---|---|---|---|---|---|
| Distribution | Static Cycle | 10 | 25 | 50 | 75 | 100 |
| 60/40 | 1.152 | 1.147 [0.43] * | 1.092 [5.21] | 1.026 [10.9] | 0.999 [13.28] | 0.977 [15.19] |
| 70/30 | 1.159 | 1.156 [0.26] | 1.113 [3.97] | 1.047 [9.66] | 1.020 [11.99] | 1.004 [13.37] |
| 80/20 | 1.189 | 1.176 [1.09] | 1.144 [3.78] | 1.080 [9.17] | 1.062 [10.68] | 1.040 [12.53] |
* relative savings [%] compared to the static cycle.
Table 10.
Average NOx pollution [g/km], in a typical day, for Case B.
| Total Daily Flow 8838 veh | % of GNSS Vehicles | |||||
|---|---|---|---|---|---|---|
| Distribution | Static Cycle | 10 | 25 | 50 | 75 | 100 |
| 60/40 | 1.422 | 1.322 [7.03] * | 1.168 [26.09] | 1.051 [26.09] | 0.997 [29.89] | 0.973 [31.58] |
| 70/30 | 1.431 | 1.322 [7.62] | 1.175 [25.23] | 1.070 [25.23] | 1.018 [28.86] | 1.000 [30.12] |
| 80/20 | 1.437 | 1.336 [7.03] | 1.206 [23.31] | 1.102 [23.31] | 1.065 [25.89] | 1.041 [27.56] |
* relative savings [%] compared to the static cycle.
Table 11.
Average PM pollution [g/km], in a typical day, for Case A.
| Total Daily Flow 8838 veh | % of GNSS Vehicles | |||||
|---|---|---|---|---|---|---|
| Distribution | Static Cycle | 10 | 25 | 50 | 75 | 100 |
| 60/40 | 0.013 | 0.012 [7.69] * | 0.012 [7.69] | 0.011 [15.38] | 0.011 [15.38] | 0.011 [15.38] |
| 70/30 | 0.013 | 0.013 [0.00] | 0.012 [7.69] | 0.012 [7.69] | 0.012 [7.69] | 0.012 [7.69] |
| 80/20 | 0.014 | 0.014 [0.00] | 0.013 [7.14] | 0.013 [7.14] | 0.013 [7.14] | 0.013 [7.14] |
* relative savings [%] compared to the static cycle.
Table 12.
Average PM pollution [g/km], in a typical day, for Case B.
| Total Daily Flow 8838 veh | % of GNSS Vehicles | |||||
|---|---|---|---|---|---|---|
| Distribution | Static Cycle | 10 | 25 | 50 | 75 | 100 |
| 60/40 | 0.014 | 0.013 [7.14] * | 0.012 [14.29] | 0.011 [21.43] | 0.011 [21.43] | 0.011 [21.43] |
| 70/30 | 0.014 | 0.013 [7.14] | 0.012 [14.26] | 0.012 [14.29] | 0.012 [14.29] | 0.012 [14.29] |
| 80/20 | 0.015 | 0.014 [6.67] | 0.013 [13.33] | 0.013 [13.33] | 0.013 [13.33] | 0.012 [20.00] |
* relative savings [%] compared to the static cycle.
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Astarita, V.; Giofrè, V.P.; Guido, G.; Vitale, A. A Single Intersection Cooperative-Competitive Paradigm in Real Time Traffic Signal Settings Based on Floating Car Data. Energies 2019, 12, 409. https://doi.org/10.3390/en12030409
AMA Style
Astarita V, Giofrè VP, Guido G, Vitale A. A Single Intersection Cooperative-Competitive Paradigm in Real Time Traffic Signal Settings Based on Floating Car Data. Energies. 2019; 12(3):409. https://doi.org/10.3390/en12030409
Chicago/Turabian StyleAstarita, Vittorio, Vincenzo Pasquale Giofrè, Giuseppe Guido, and Alessandro Vitale. 2019. "A Single Intersection Cooperative-Competitive Paradigm in Real Time Traffic Signal Settings Based on Floating Car Data" Energies 12, no. 3: 409. https://doi.org/10.3390/en12030409
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.