The Determination of the Theoretical Stroke Volume of Hydrostatic Positive Displacement Pumps and Motors from Volumetric Measurements


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
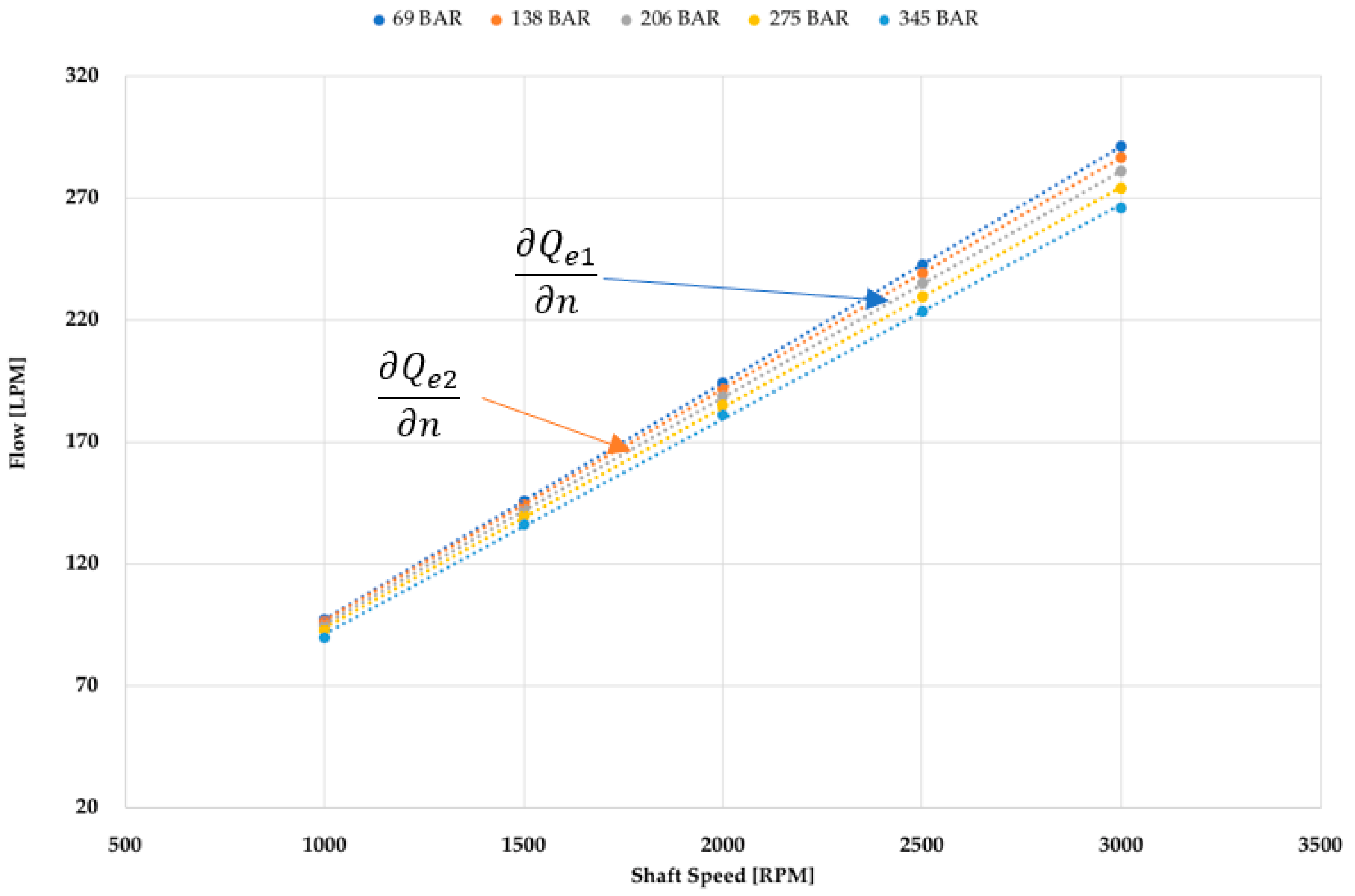
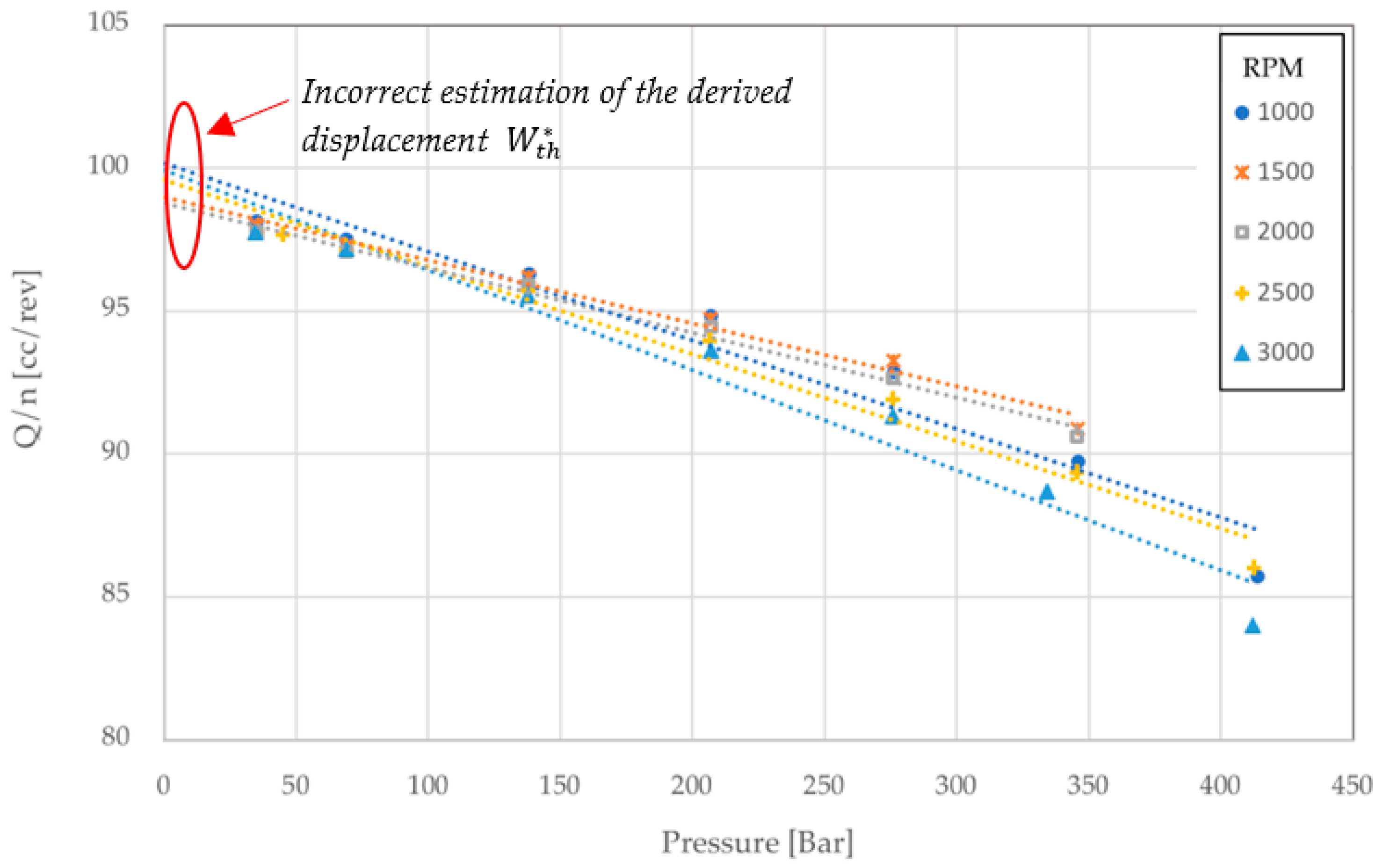
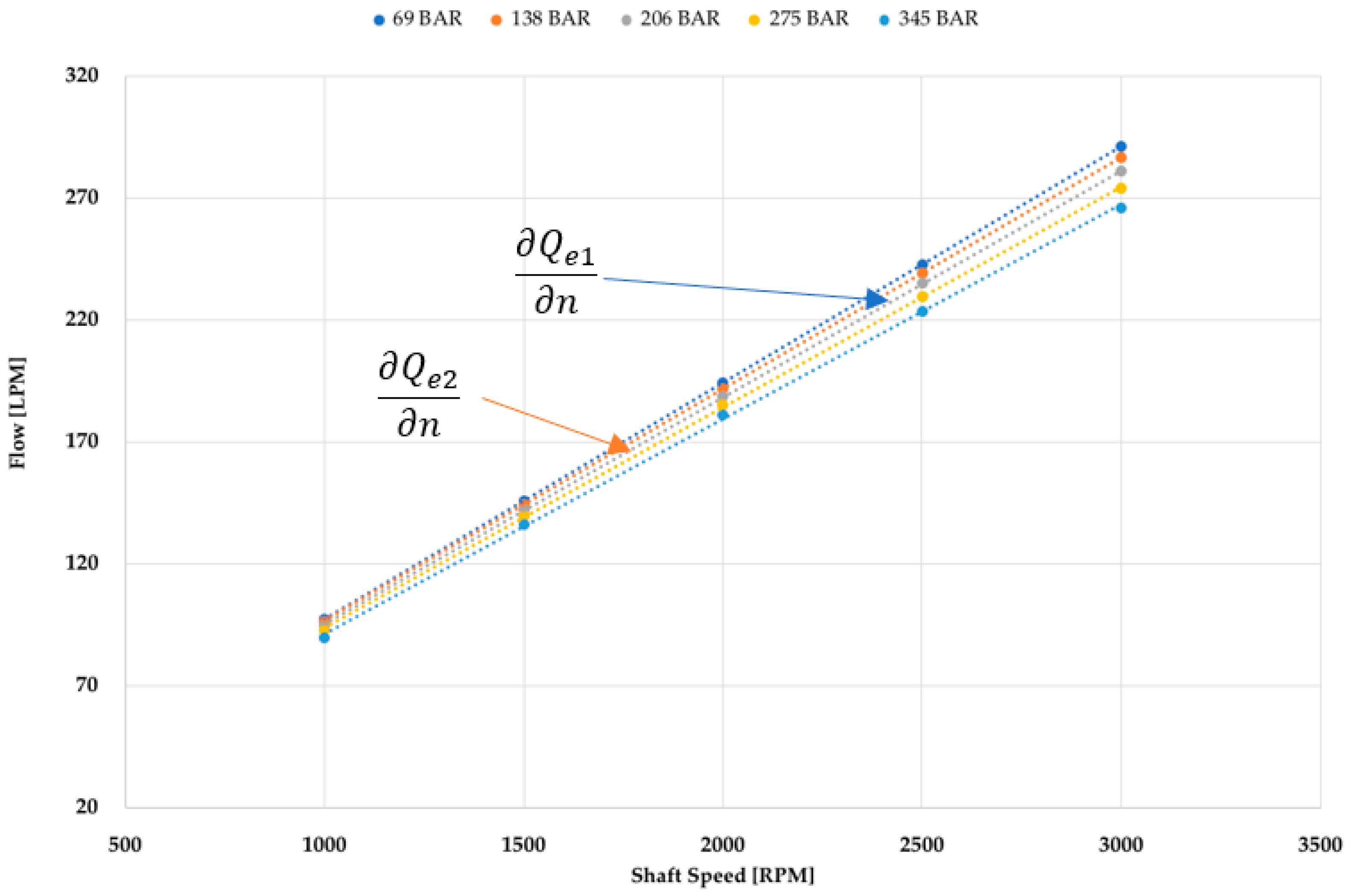
1.1. Illustrative Graphical Example of the Incorrectly Applied Method
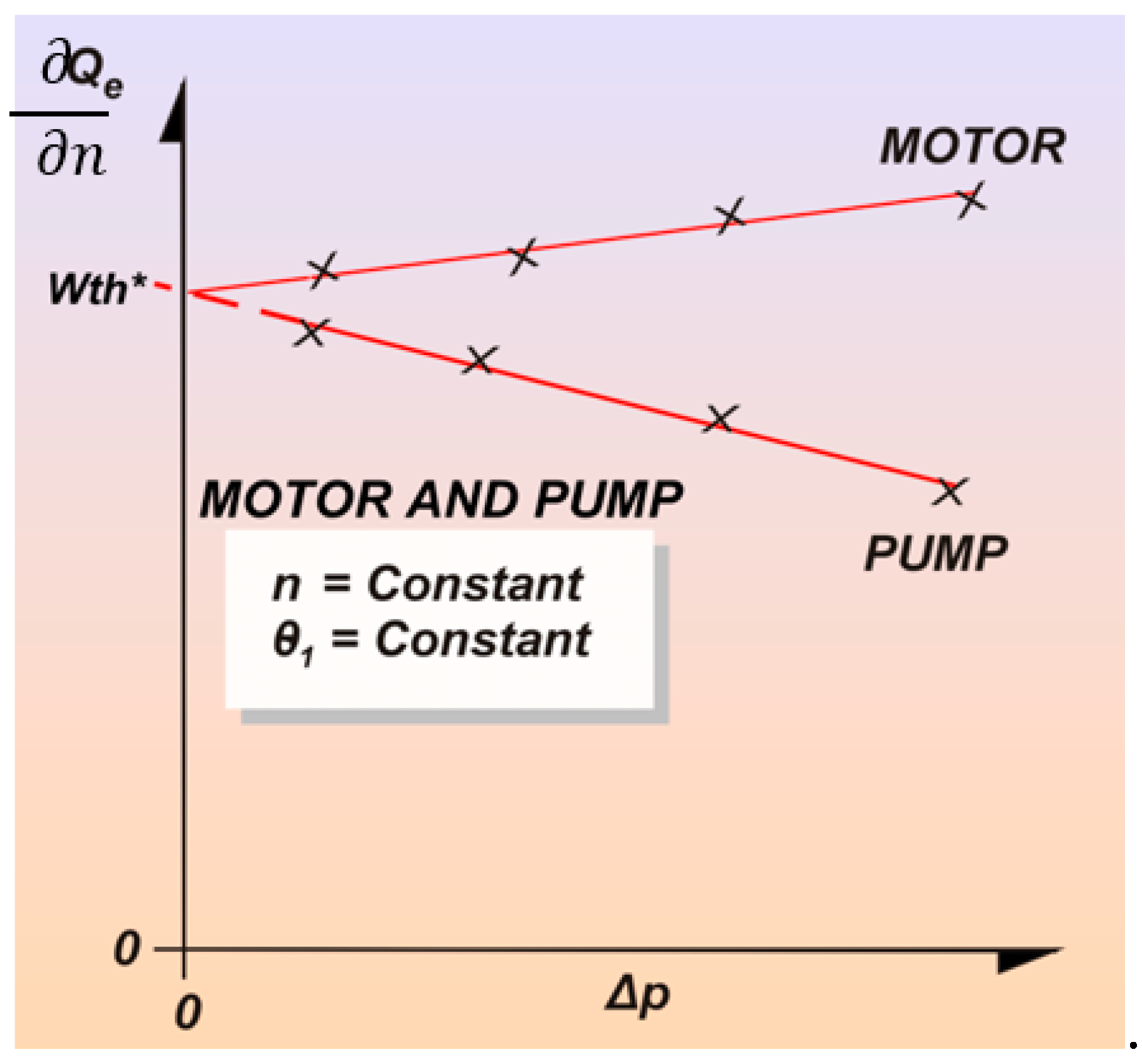
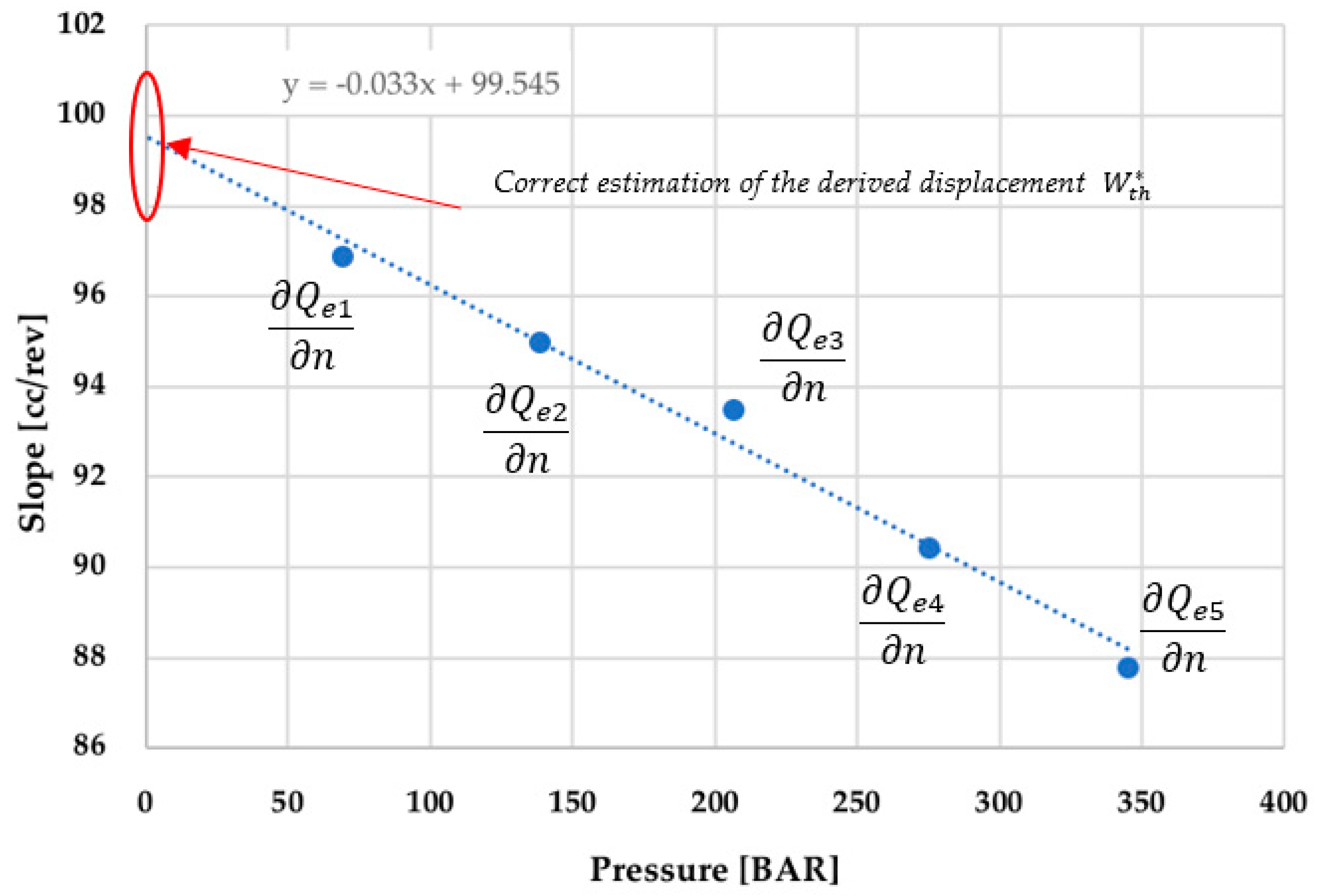
1.2. Graphical Example Illustrating the Correct Method
2. Original Paper—Translated from German
3. Determination of the Stroke Volume
3.1. Critique of a Common Definition of Wth
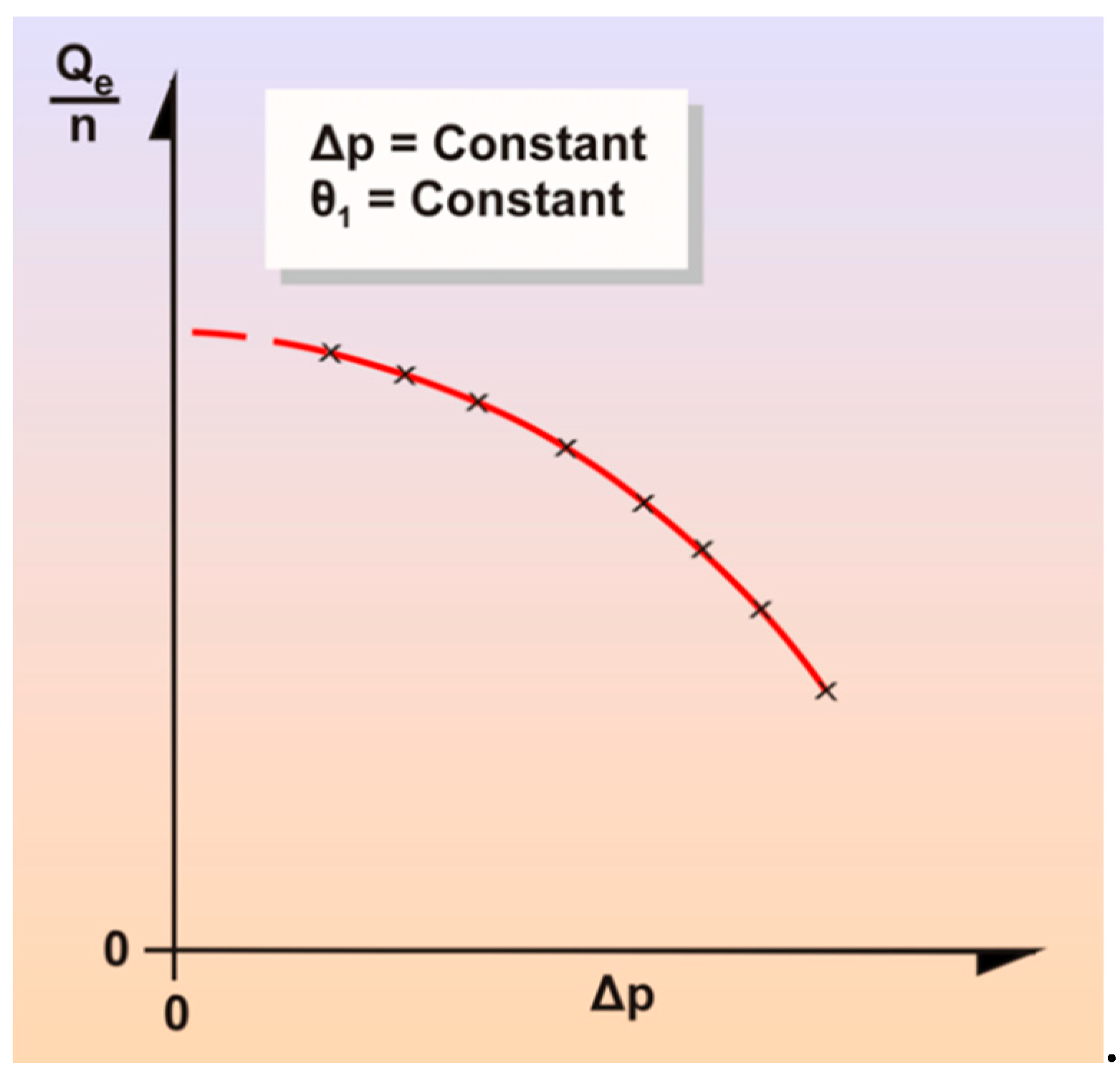
- For pumps: Qe is the volume flow available at the outlet port calculated at the outlet pressure but using the fluid temperature at the inlet port (Figure 6b);
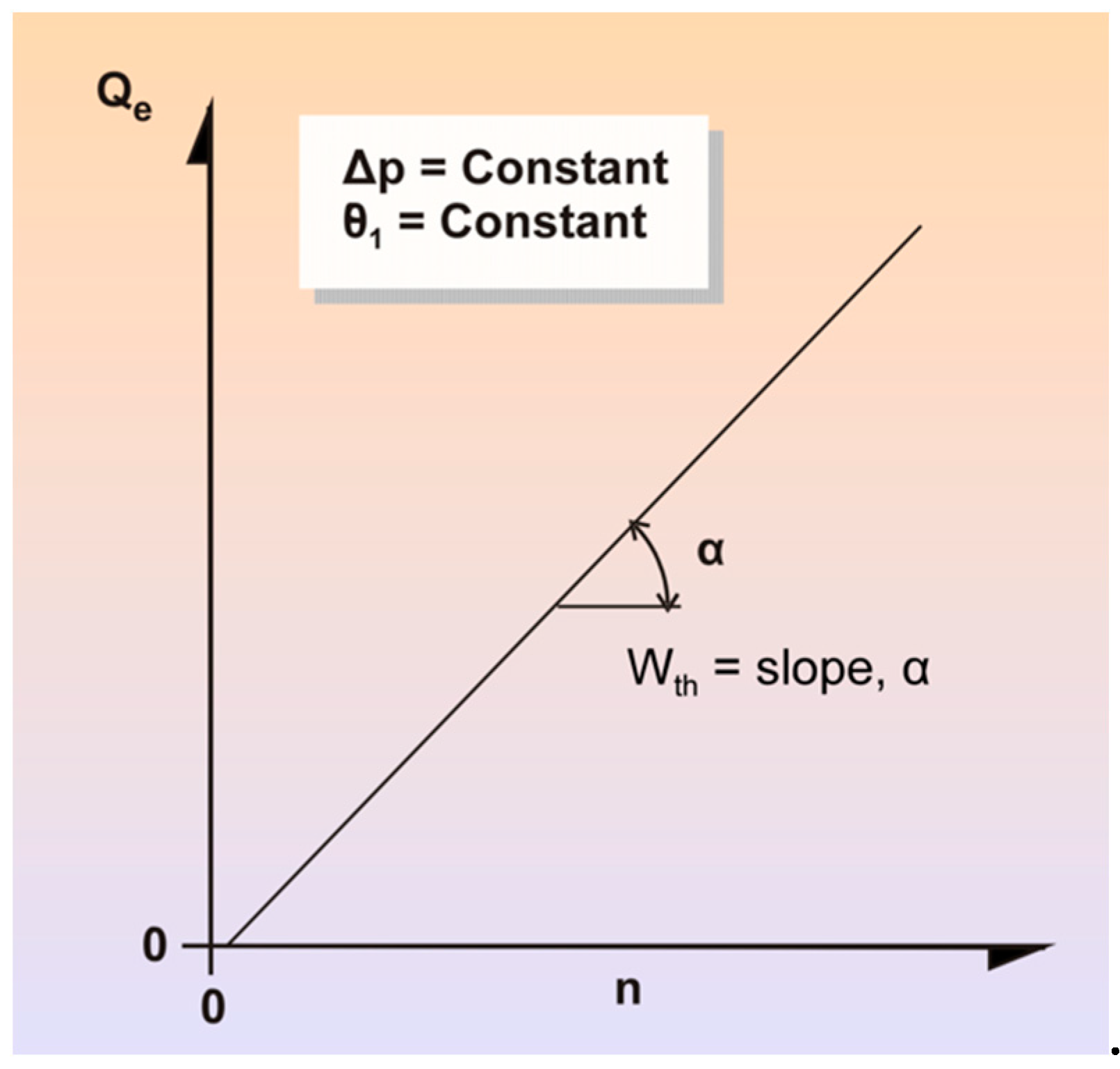
- For motors: Qe is the volume flow delivered to the inlet port calculated at the inlet pressure and uses the fluid temperature at the inlet port (Figure 6a).
3.2. A Critical Analysis of the Effective Volume Flow
3.2.1. The Positive Displacement Component
3.2.2. The Couette Component
3.2.3. The Leakage Component
3.2.4. The Compressibility Component
- -
- The pressure at the low pressure side is close to atmospheric pressure;
- -
- The contribution of the Couette flow and leakage effect is negligibly small;
- -
- Consequently, by disregarding the very small contribution of the Couette and leakage current influences, the parenthetical in Equation (13) can be reduced, and the expansion rate is:
- -
- The constants K1 and K2 are known to be positive or negative;
- -
- -
- All relationships apply to the temperature, , on the inlet side.
4. Proposal for a New, Final Definition of the Theoretical Displacement
- is independent of n and Δp;
- As a result of the definition of , it is unavoidable that all influencing effects on the volumetric flow, which are not expressed by , and , can contribute to the amount of the leakage flow, Qs;
- At present, no methods for the separation of Wg and Wm are known;
- Among other things, the cause of the repeated occurrence of volumetric efficiencies greater than 100% must be sought in the application of Wg as the theoretical displacement volume, ignoring the entrainment volume Wm. This excess volumetric efficiency effect occurs especially in pumps with high volumetric efficiencies;
- Pumps and motors with a mathematically very precise determinable geometric displacement, where a Couette volume is absent or negligible, show values for that are very close to , provided that θ1 is the same. Measurements have shown that this is the case with screw pumps and motors [21].
5. Differences between and the Earlier Method
- The theoretical displacement based on the definition from Equation (2) is repeated here for convenience:Apart from Δp, the effective flow is also dependent on the influence of the speed on the leakage flow. The derived displacement volume is thus dependent on the shape of the leakage clearances, the internal resistance, and the properties of the fluid.
- The method of determining leaves the choice of Δp much leeway. In the determination of , this freedom is no longer present, since is determined for values with Δp = 0, where Δpi should be small.
6. The Practical Implementation of the Method
7. Original Conclusions from Translated Paper
8. End of the Translated Document
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Symbol | Description | Dimensions | Symbol | Description | Dimensions |
| n | Shaft speed | T−1 | Derived displacement for a pump | L3 | |
| Δp | Pressure differential between high and low sides | M L−1T−2 | Derived displacement for a motor | L3 | |
| Qg | Geometric volumetric flow | L3T−1 | a | Constant in the Qe vs. n relationship | L3 |
| Qe | Effective volumetric flow | L3T−1 | b | Constant in the Qe vs. n relationship | L3T−1 |
| Qs | Leakage flow | L3T−1 | c | Constant in the ∂Qe/∂n vs. Δp relationship | M−1 L4T2 |
| Qexp | Compressibility flow | L3T−1 | d | Constant in the ∂Qe/∂n vs. Δp relationship | L3 |
| QTh | Theoretical/ ideal flow | L3T−1 | θ1 | Inlet temperature | °C |
| Wth | Derived displacement | L3 | Fluid density at pressure p and temperature θ1 | M L−3 | |
| Wg | Geometric displacement | L3 | Fluid density at standard conditions | M L−3 | |
| Wm | Couette volume | L3 | A | Temperature dependent factor in the state equation | M−1 LT−2 |
| Derived displacement from measurements | L3 | B | Temperature dependent factor in the state equation | M−2 L2T4 | |
| K1 | Bulk modulus for geometric stroke volume | M L−1T−2 | C | Temperature dependent factor in the state equation | M−2 L3T6 |
| K2 | Bulk modulus for fluid volume | M L−1T−2 |
References
- Toet, G. Die Bestimmung des theoretischen Hubvolumens von hydrostatischen Verdrangerpumpen und Motoren aus volumetrischen Messungen. Olhydraulik Pneum. 1970, 14, 185–190. [Google Scholar]
- Post, W.J.A.E.M. Models for steady-state performance of hydraulic pumps: Determination of displacement. In Proceedings of the 9th International Workshop, Bath, UK, 9–11 September 1996. [Google Scholar]
- Conrad, F.; Trostmann, E.; Zhang, M. Experimental identification and modelling of flow and torque losses in gerotor hydraulic motors. Jpn. Fluid Power Syst. Soc. 1993, 1993, 677–682. [Google Scholar] [CrossRef] [Green Version]
- Ivantysyn, J.; Ivantysynova, M. Hydrostatic Pumps and Motors, Principles, Designs, Performance, Modeling, Analysis, Control and Testing; Academia Books International: New Delhi, India, 2000. [Google Scholar]
- International Organization for Standardization (ISO). Hydraulic Fluid Power—Positive Displacement Pumps and Motors—Determination of Derived Capacity; ISO Copyright Office: Geneva, Switzerland, 2008. [Google Scholar]
- SAE. Hydraulic Power Pump Test Procedure. J745 (Recommended Practice). In SAE Handbook; Society of Automotive Engineers: Warrendale, PA, USA, 1991. [Google Scholar]
- Hall, S. Statistical Analysis of Multiple Hydrostatic Pump Flow Loss Models. Master’s Thesis, Iowa State University, Ames, IA, USA, 2014. [Google Scholar]
- Myszkowski, A. Energy analysis of an ideal suction-pressure unit. Arch. Mech. Technol. Mater. 2015, 35, 51–60. [Google Scholar]
- Czyński, M. Energy efficiency of hydrostatic transmission. Comparing results of laboratory and simulation tests. Sci. Probl. Mach. Oper. Maint. 2008, 43, 59–70. [Google Scholar]
- Taeho, K.; Kalbfleisch, P.; Ivantysynova, M. The effect of cross porting on derived displacement volume. Int. J. Fluid Power 2014, 15, 77–85. [Google Scholar]
- Zecchi, M.; Mehdizadeh, A.; Ivantysynova, M. A novel approach to predict the steady state temperature in ports and case of swash plate type axial piston machines. In Proceedings of the 13th Scandinavian International Conference on Fluid Power, Linköping, Sweden, 3–5 June 2013; Linköping University Electronic Press: Linköping, Sweden, 2013; pp. 177–187. [Google Scholar]
- Manring, N.; Christopher, W. Calculating the Mechanical and Volumetric Efficiencies for Check-Valve Type, Digital Displacement Pumps. In Proceedings of the BATH/ASME 2018 Symposium on Fluid Power and Motion Control, Bath, UK, 12–14 September 2018. [Google Scholar]
- Noah, M.; Williamson, C. The Theoretical Volumetric Displacement of a Check-Valve Type, Digital Displacement Pump. J. Dyn. Syst. Meas. Control 2019, 141, 031014. [Google Scholar]
- Kohmäscher, T.; Rahmfeld, R.; Murrenhoff, H.; Skirde, E. Improved loss modeling of hydrostatic units: Requirement for precise simulation of mobile working machine drivelines. In Proceedings of the ASME 2007 International Mechanical Engineering Congress and Exposition, Seattle, WA, USA, 11–15 November 2007; pp. 195–206. [Google Scholar]
- Garcia-Bravo, J.; Nicholson, J. What is the real size of that pump? Fluid Power J. Manuf. Dir. 2018, 25, 20–21. [Google Scholar]
- Schlosser, W.M.J.; Hilbrands, J.W. Das volumetrische Wirkungsgrad von Verdrongerpumpen. Oilhydraulik Pneum. 1963, 7, 469–476. [Google Scholar]
- Wilson, W.E. Positive Displacement Pumps and Fluid Motors; Publication Corporation: New York, NY, USA, 1950. [Google Scholar]
- Schlosser, W.M.J. Meten aan Verdringerpompen. Ph.D. Thesis, Technical Hogeschool Delft, Delft, The Netherlands, 1957. [Google Scholar]
- Schlosser, W.M.J.; Hilbrands, J.W. Das theoretische Hubvolumen von Verdrangerpumpen. Olhydraulik Pneum. 1963, 7, 133–138. [Google Scholar]
- Schlosser, W.M.J.; Verduyn, H.A. Folgerungen aus einer Zustandsgleichung fur Mineralole. Olhydraulik Pneum. 1960, 2, 39–41. [Google Scholar]
- Van der Kroonenberg, H.H. Het Meten en Verkloren of de Karakferistieken van a Hydrostatische Wormmotor. Ph.D. Thesis, TH Eindhoven, Eindhoven, The Netherlands, 1966. [Google Scholar]
- Schlosser, W.M.J.; Toet, G. Messung stationärer Eigenschaften von hydraulischen Übertragungen. Schweiz. Bauzeilung 1969, 87, 167–175. [Google Scholar]




© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Toet, G.; Johnson, J.; Montague, J.; Torres, K.; Garcia-Bravo, J. The Determination of the Theoretical Stroke Volume of Hydrostatic Positive Displacement Pumps and Motors from Volumetric Measurements. Energies 2019, 12, 415. https://doi.org/10.3390/en12030415
Toet G, Johnson J, Montague J, Torres K, Garcia-Bravo J. The Determination of the Theoretical Stroke Volume of Hydrostatic Positive Displacement Pumps and Motors from Volumetric Measurements. Energies. 2019; 12(3):415. https://doi.org/10.3390/en12030415
Chicago/Turabian StyleToet, Gijsbert, Jack Johnson, John Montague, Ken Torres, and José Garcia-Bravo. 2019. "The Determination of the Theoretical Stroke Volume of Hydrostatic Positive Displacement Pumps and Motors from Volumetric Measurements" Energies 12, no. 3: 415. https://doi.org/10.3390/en12030415