Fast Processing Intelligent Wind Farm Controller for Production Maximisation

 , ,
, ,
Abstract
:1. Introduction
2. Wind and Wake Modeling
3. Turbulence Intensity–Based Jensen Model (TI–JM)
4. Optimisation
4.1. Objective Function
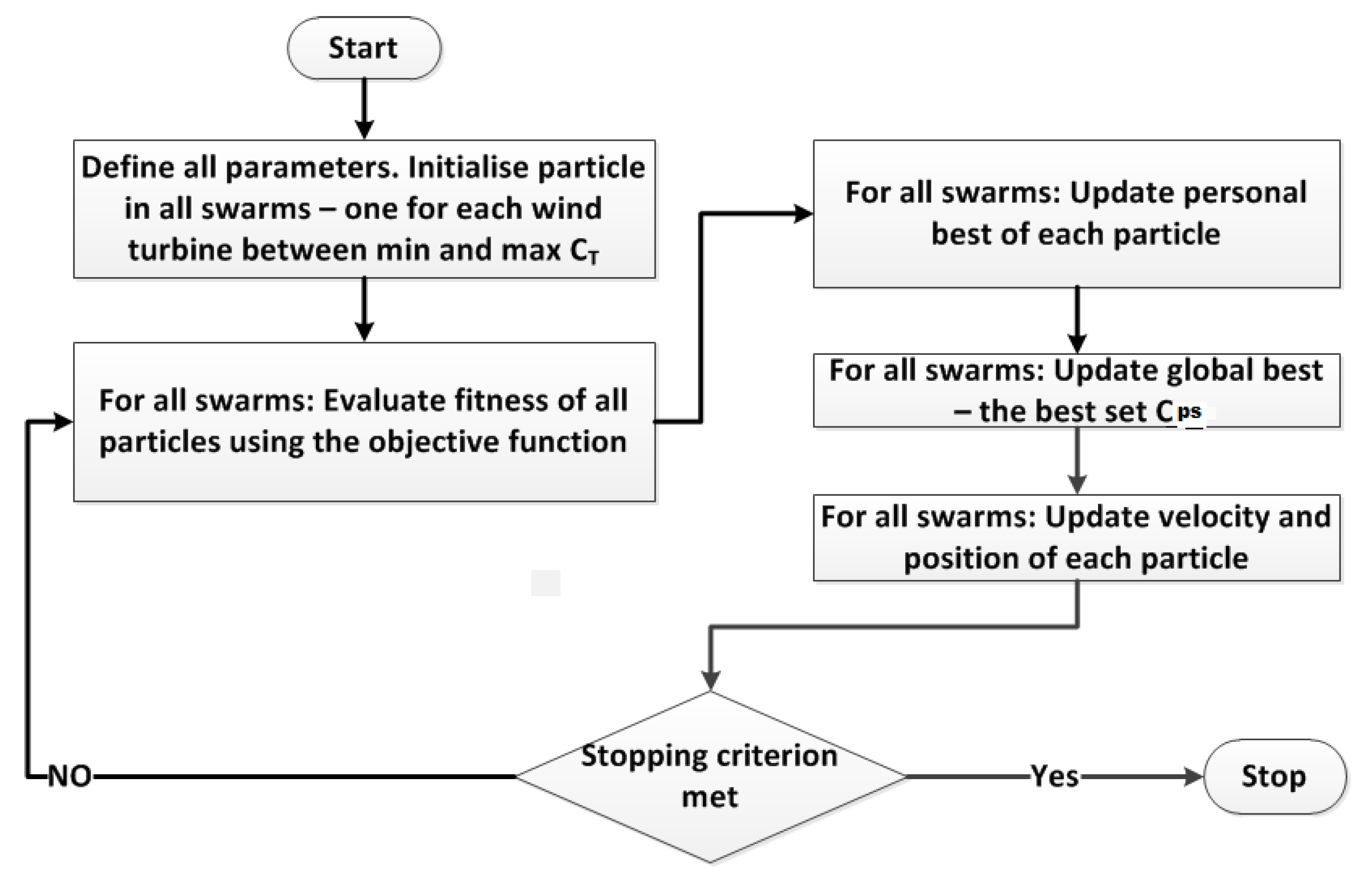
4.2. Particle Swarm Optimisation (PSO)
5. Wind Farms Case Studies
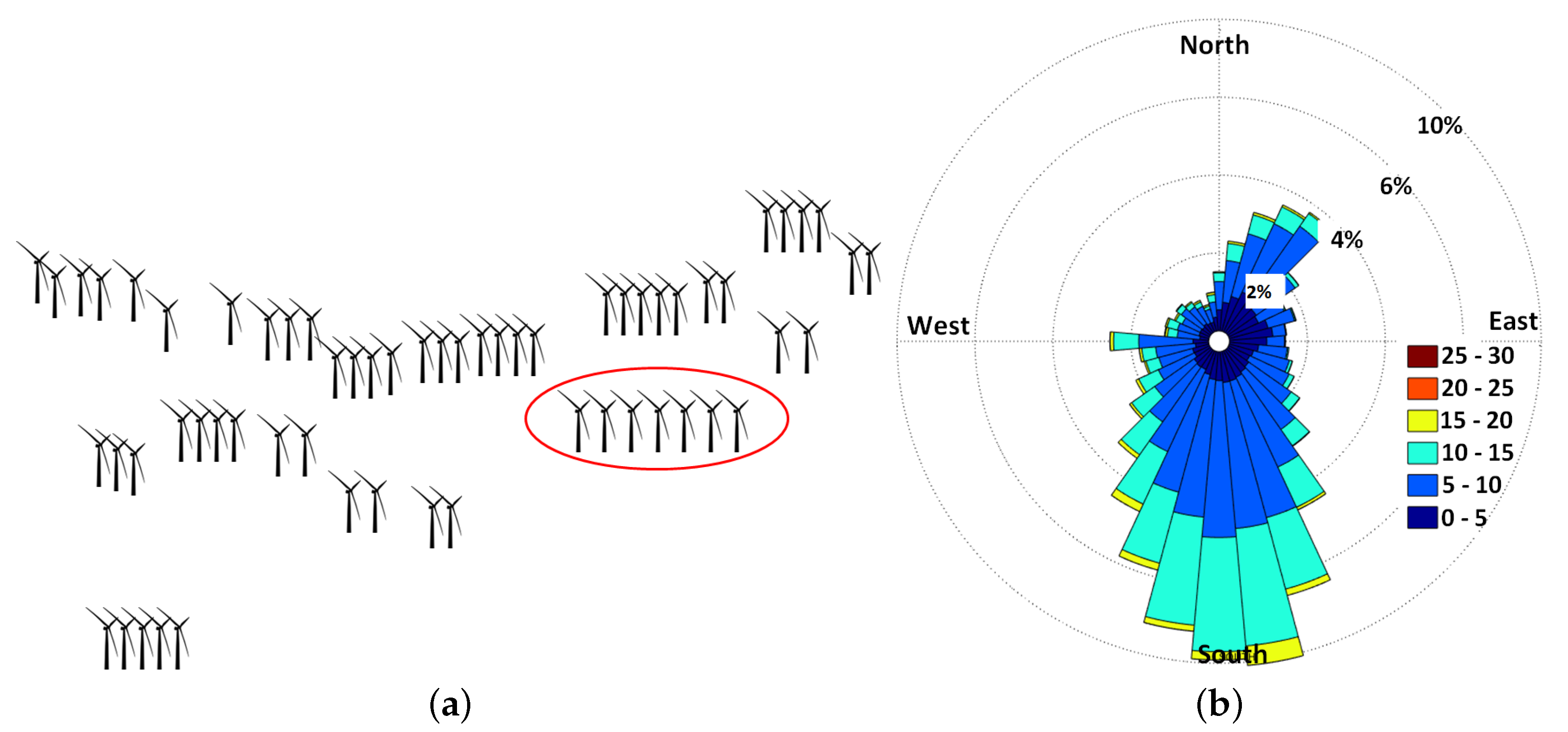
5.1. Brazos
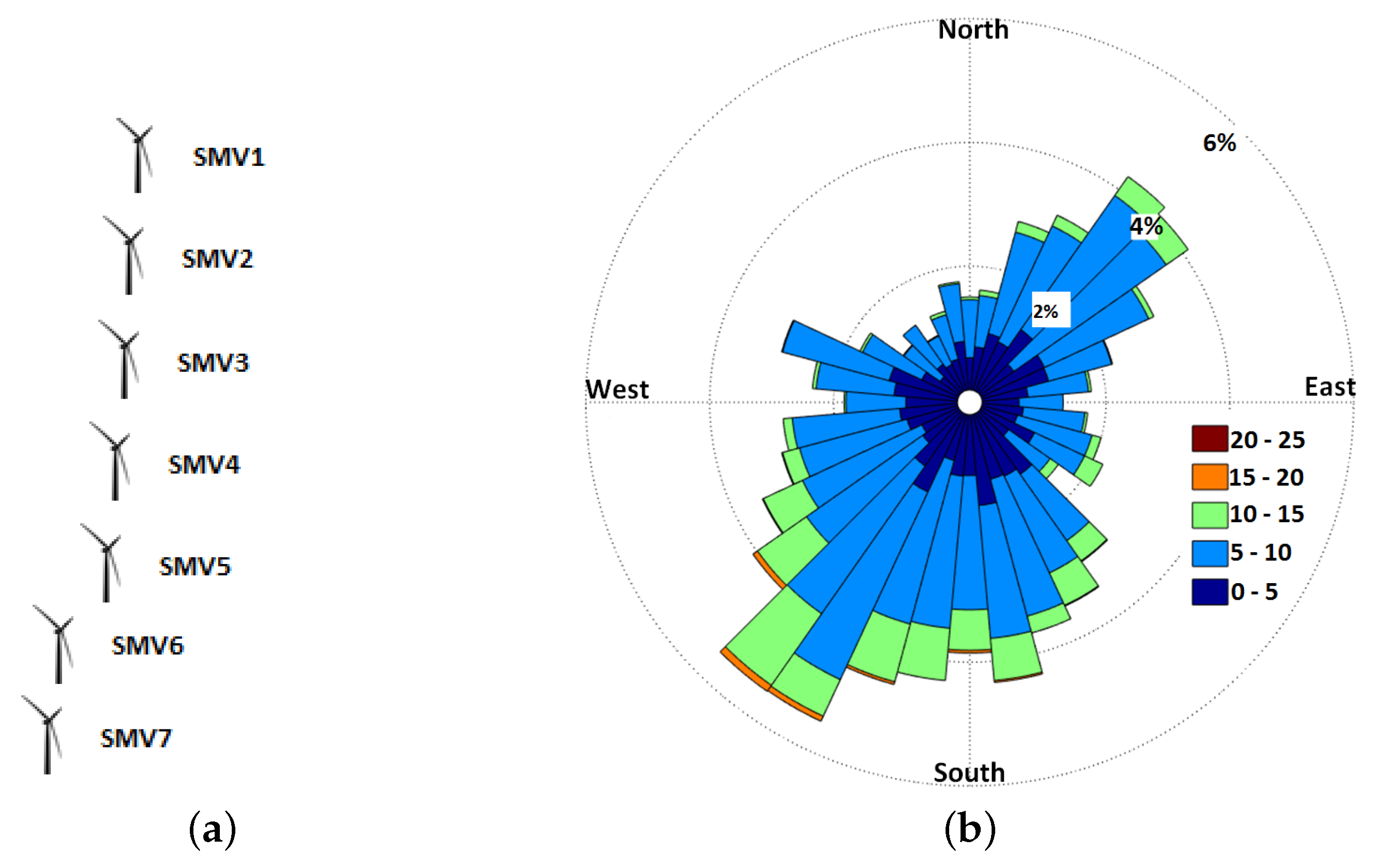
5.2. Le Sole de Moulin Vieux (SMV)
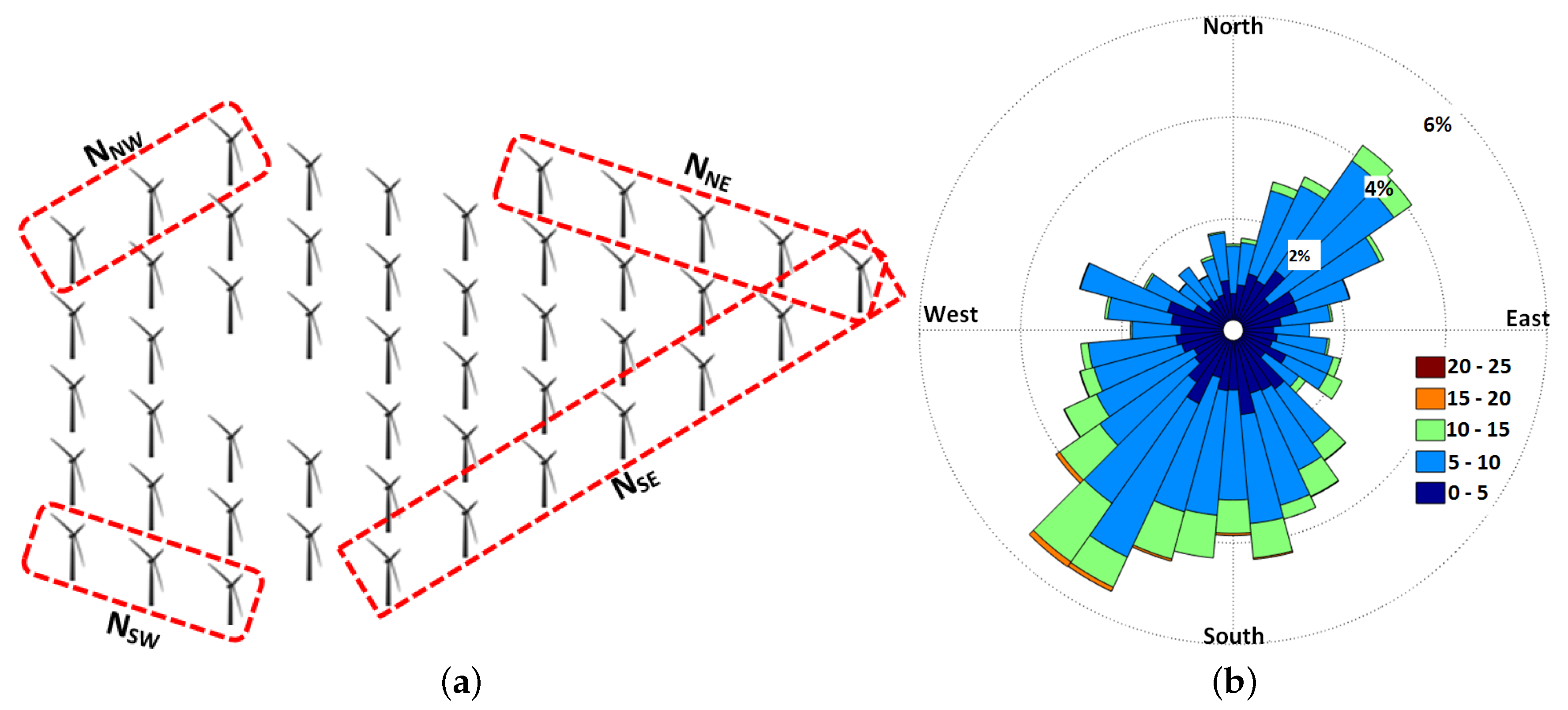
5.3. Lillgrund
6. Methodology for Calculating Efficiency
7. Results and Analyses
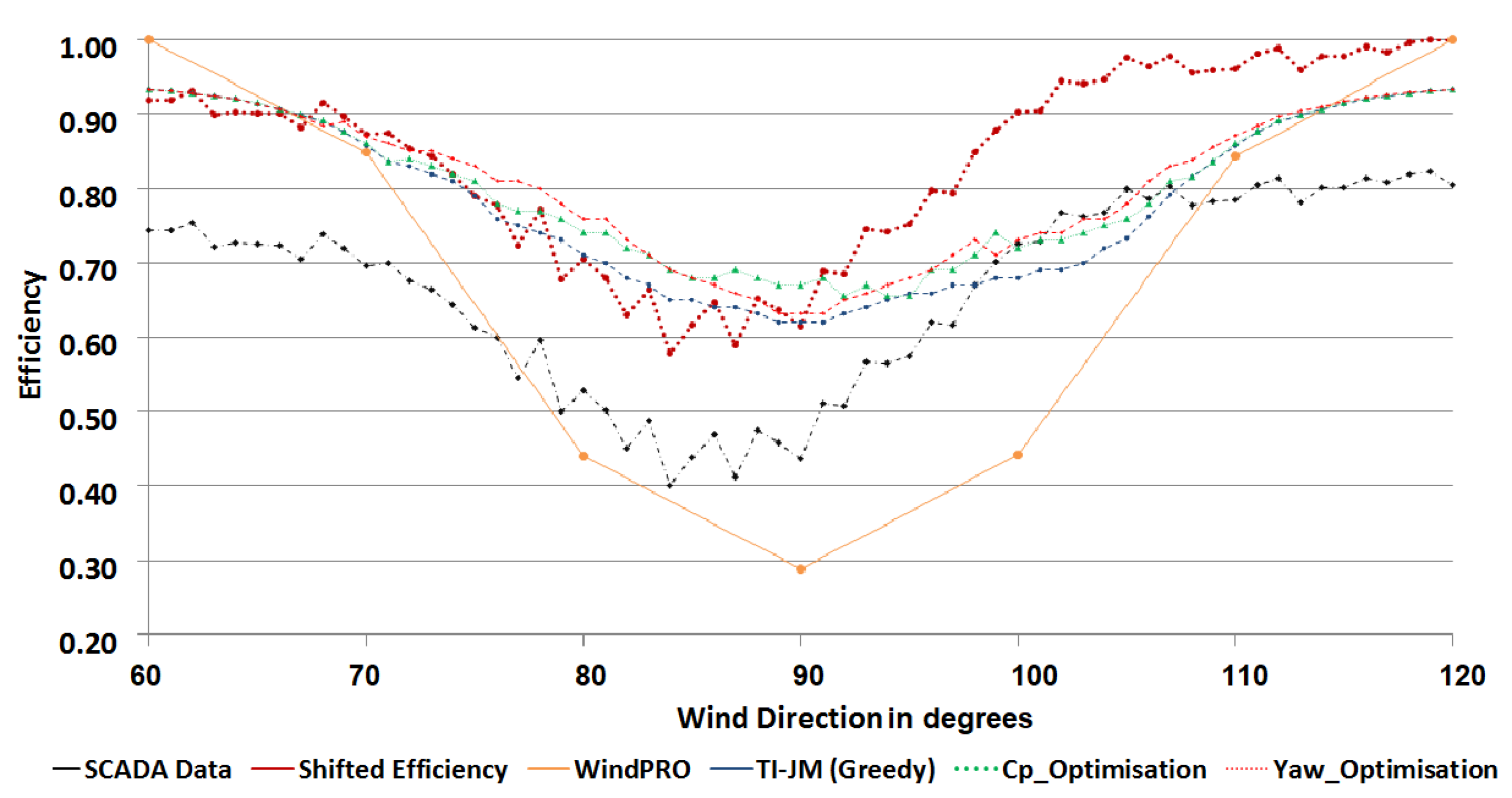
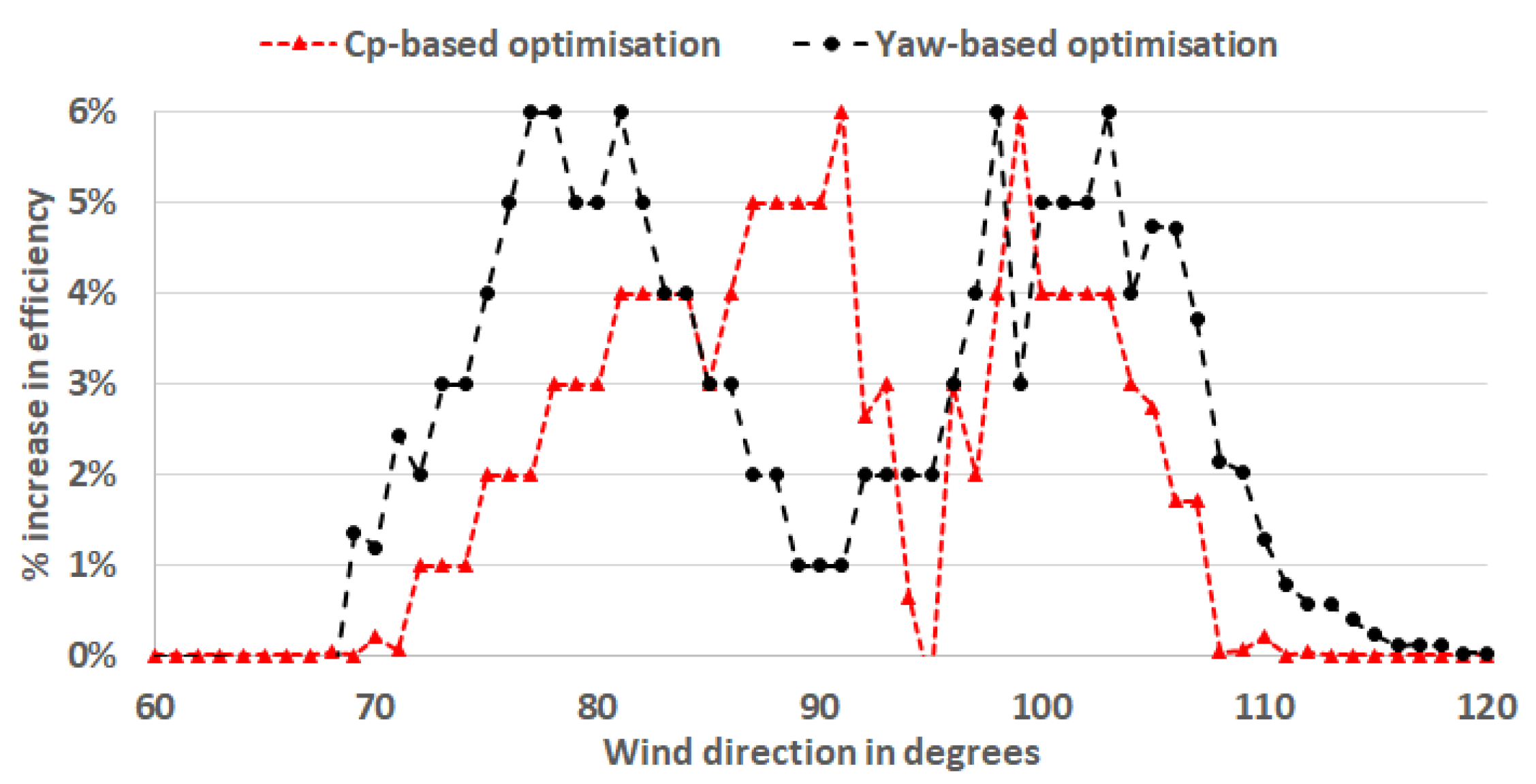
7.1. Brazos-Row
- Full wakes (worst case) =
- Partial wakes = and
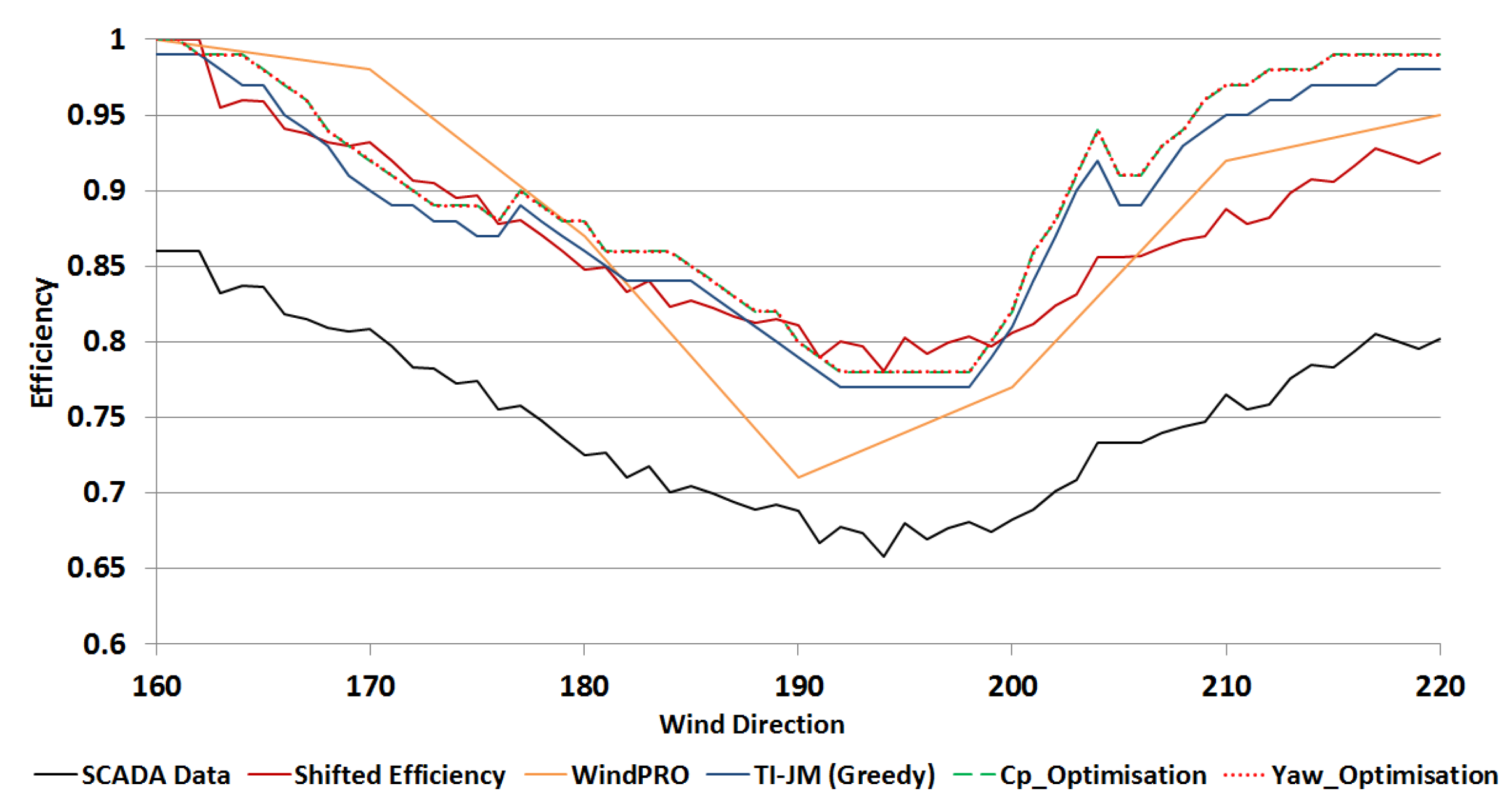
7.2. Le Sole de Moulin Vieux (SMV)
7.3. Lillgrund
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| PSO | Particle Swarm Optimisation |
| TI–JM | Turbulence Intensity based Jensen Model |
| SMV | Le Sole de Moulin Vieux |
| CFD | Computational Fluid Dynamics |
| SCADA | Supervisory Control And Data Acquisition |
References
- Bitar, E.; Seiler, P. Coordinated control of a wind turbine array for power maximization. In Proceedings of the 2013 American Control Conference (ACC), Washington, DC, USA, 17–19 June 2013; pp. 2898–2904. [Google Scholar]
- Pao, L.Y.; Johnson, K.E. A tutorial on the dynamics and control of wind turbines and wind farms. In Proceedings of the American Control Conference (ACC ’09), St. Louis, MO, USA, 10–12 June 2009; Volume 172, pp. 2076–2089. [Google Scholar]
- Johnson, K.E.; Thomas, N. Wind farm control: addressing the aerodynamic interaction among wind turbines. In Proceedings of the American Control Conference (ACC ’09), St. Louis, MO, USA, 10–12 June 2009; Volume 155, pp. 2104–2109. [Google Scholar]
- Ahmad, T.; Girard, N.; Kazemtabrizi, B.; Matthews, P. Analysis of Two Onshore Wind Farms with a Dynamic Farm Controller; EWEA: Paris, France, 2015. [Google Scholar]
- Dahlberg, J.A. Assessment of the Lillgrund Windfarm: Power Performance; Technical Report 21858-1; Vatenfall Vindkraft AB: Solna Municipality, Sweden, 2009; Available online: https://corporate.vattenfall.se/globalassets/sverige/om-vattenfall/om-oss/var-verksamhet/vindkraft/lillgrund/assessment.pdf (accessed on 6 February 2019).
- Aranda, F.A. Wind Farm Control Methods, IEA R&D Wind Task 11—Topical Expert Meeting; Technical Report; International Energy Agency: Solna, Sweden, 2012. [Google Scholar]
- Ahmad, T. Wind Farm Coordinated Control and Optimisation. Ph.D. Thesis, School of Engineering & Computing Sciences, Durham University, Durham, UK, 2017. Available online: http://etheses.dur.ac.uk/12323/1/Tanvir_Thesis_Final_Submission.pdf (accessed on 6 February 2019).
- Ahmad, T.; Coupiac, O.; Pettit, A.; Guignard, S.; Girard, N.; Kazemtabrizi, B.; Matthews, P. Field Implementation and Trial of Coordinated Control of Wind Farms. IEEE Trans. Sustain. Energy 2018, 9, 1169–1176. [Google Scholar] [CrossRef]
- Ambekar, A.; Ryali, V.; Tiwari, A.K. Methods and Systems for Optimizing Farm-Level Metrics in a Wind Farm. U.S. Patent 9,201,410, 1 December 2015. [Google Scholar]
- Soleimanzadeh, M.; Wisniewski, R.; Kanev, S. An optimization framework for load and power distribution in wind farms. J. Wind Eng. Ind. Aerodyn. 2012, 107, 256–262. [Google Scholar] [CrossRef]
- Lignarolo, L.; Ragni, D.; Krishnaswami, C.; Chen, Q.; Simão Ferreira, C.; van Bussel, G. Experimental analysis of the wake of a horizontal-axis wind-turbine model. Renew. Energy 2014, 70, 31–46. [Google Scholar] [CrossRef]
- Sanderse, B. Aerodynamics of Wind Turbine Wakes; Tech. Rep ECN-E–09-016; Energy Research Center of the Netherlands (ECN): Petten, The Netherlands, 2009. [Google Scholar]
- Barthelmie, R.; Larsen, G.; Frandsen, S.; Folkerts, L.; Rados, K.; Pryor, S.; Lange, B.; Schepers, G. Comparison of Wake Model Simulations with Offshore Wind Turbine Wake Profiles Measured by Sodar. J. Atmos. Ocean. Technol. 2006, 23, 888–901. [Google Scholar] [CrossRef]
- Gaumond, M.; Réthoré, P.E.; Bechmann, A.; Ott, S.; Larsen, G.C.; Peña, A.; Hansen, K.S. Benchmarking of wind turbine wake models in large offshore wind farms. In Proceedings of the Science of Making Torque from Wind Conference, Oldenburg, Germany, 8–10 October 2012. [Google Scholar]
- Vogstad, K.; Bhutoria, V.; Lund, J.A.; Ivanell, S.; Uzunoglu, B. Instant Wind—Model Reduction for Fast CFD Computations; Elforsk Report 12:72. 2012. Available online: https://www.researchgate.net/publication/236222690_Instant_Wind_Model_reduction_for_fast_CFD_computations_Elforsk_report_1272 (accessed on 6 February 2019).
- Annoni, J.; Seiler, P.; Johnson, K.; Fleming, P.; Gebraad, P. Evaluating wake models for wind farm control. In Proceedings of the American Control Conference (ACC), Portland, OR, USA, 4–6 June 2014; pp. 2517–2523. [Google Scholar]
- Rados, K.; Larsen, G.; Barthelmie, R.; Schlez, W.; Lange, B.; Schepers, G.; Hegberg, T.; Magnisson, M. Comparison of wake models with data for offshore windfarms. Wind Eng. 2001, 25, 271–280. [Google Scholar] [CrossRef]
- Vermeer, L.; Sørensen, J.N.; Crespo, A. Wind turbine wake aerodynamics. Prog. Aerosp. Sci. 2003, 39, 467–510. [Google Scholar] [CrossRef]
- Franke, J.; Hirsch, C.; Jensen, A.; Krüs, H.; Schatzmann, M.; Westbury, P.; Miles, S.; Wisse, J.; Wright, N. Recommendations on the use of CFD in wind engineering. Cost Action C 2004, 14, C1. [Google Scholar]
- Ainslie, J.F. Calculating the flowfield in the wake of wind turbines. J. Wind Eng. Ind. Aerodyn. 1988, 27, 213–224. [Google Scholar] [CrossRef]
- Churchfield, M.J.; Moriarty, P.J.; Hao, Y.; Lackner, M.A.; Barthelmie, R.; Lundquist, J.K.; Oxley, G.S. A comparison of the dynamic wake meandering model, large-eddy simulation, and field data at the Egmond aan Zee Offshore wind plant. In Proceedings of the AIAA Science and Technology Forum and Exposition (SciTech 2015), Kissimmee, FL, USA, 5–9 January 2015. [Google Scholar]
- Sanderse, B.; Pijl, S.; Koren, B. Review of Computational Fluid Dynamics for wind turbine wake aerodynamics. Wind Energy 2011, 14, 799–819. [Google Scholar] [CrossRef]
- Hoelzer, M.; Hölling, M.; Wolken-Möhlmann, G.; Knebel, P.; Gottschall, J.; Anahua, E.; Barth, S.; Peinke, J. Annual Report 2007—Research Projects (RP); Technical Report; ForWind—Center for Wind Energy Research of the Universities of Oldenburg and Hannover: Oldenburg, Germany, 2007. [Google Scholar]
- Churchfield, M. Review of Wind Turbine Wake Models and Future Directions (Presentation); Technical Report NREL/PR-5000-60208; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2013.
- Jensen, N.O. A Note on Wind Generator Interaction; Technical Report Risø -M-2411; Risø National Laboratory: Roskilde, Denmark, 1983. [Google Scholar]
- Katic, I.; Højstrup, J.; Jensen, N.O. A simple model for cluster efficiency. In Proceedings of the European Wind Energy Association Conference and Exhibition, Rome, Italy, 7–9 October 1986; pp. 407–410. [Google Scholar]
- Larsen, G.C.; Aagaard Madsen, H.; Sørensen, N.N. Mean wake deficit in the near field. In Proceedings of the European Wind Energy Conference and Exhibition, Madrid, Spain, 16–19 June 2003; European Wind Energy Association (EWEA): Brussels, Belgium, 2003. [Google Scholar]
- Frandsen, S.; Barthelmie, R.; Pryor, S.; Rathmann, O.; Larsen, S.; Højstrup, J.; Thøgersen, M. Analytical modelling of wind speed deficit in large offshore wind farms. Wind Energy 2006, 9, 39–53. [Google Scholar] [CrossRef]
- Annoni, J.; Gebraad, P.M.; Scholbrock, A.K.; Fleming, P.A.; van Wingerden, J.W. Analysis of axial-induction- based wind plant control using an engineering and a high-order wind plant model. Wind Energy 2015, 19, 1135–1150. [Google Scholar] [CrossRef]
- Barthelmie, R.J.; Rathmann, O.; Frandsen, S.T.; Hansen, K.; Politis, E.; Prospathopoulos, J.; Rados, K.; Cabezón, D.; Schlez, W.; Phillips, J.; et al. Modelling and measurements of wakes in large wind farms. J. Phys. Conf. Ser. 2007, 75, 012049. [Google Scholar] [CrossRef] [Green Version]
- Nielsen, P.; Villadsen, J.; Kobberup, J.; Madsen, P.; Jacobsen, T.; Thøgersen, M.L.; Sørensen, M.V.; Sørensen, T.; Svenningsen, L.; Motta, M.; et al. WindPRO 2.7 User Guide, 3rd ed.; EMD International A/S: Aalborg, Denmark, 2010. [Google Scholar]
- Beaucage, P.; Robinson, N.; Brower, M.; Alonge, C. Overview of six commercial and research wake models for large offshore wind farms. In Proceedings of the European Wind Energy Association Conference, Copenhagen, Denmark, 16–19 March 2012; pp. 95–99. [Google Scholar]
- Hassan, G. WindFarmer 5.3: Theory Manual; Garrad Hassan & Partners Ltd. DNV GL-Energy: Bristol, England, 2014. [Google Scholar]
- Zigras, D.; Moennich, K. Farm efficiencies in large wind farms. In Proceedings of the German Wind Energy Conference, Berlin, Germany, 28–30 July 2006. [Google Scholar]
- Manwell, J.F.; McGowan, J.G.; Rogers, A.L. Wind Energy Explained: Theory, Design and Application; John Wiley & Sons: West Sussex, UK, 2010. [Google Scholar]
- Sidewell, N.; Ahmad, T.; Matthews, P.C. Onshore Wind Farm Fast Wake Estimation Method: Critical Analysis of the Jensen Model; EWEA: Paris, France, 2015. [Google Scholar]
- Vogstad, K.; Bhutoria, V.; Lund, J.A.; Ivanell, S. Instant Wind Model Reduction for Fast CFD Computations; Technical Report 12:72; Elforsk: Stockholm, Sweden, 2012; Available online: https://uu.diva-portal.org/smash/get/diva2:924368/FULLTEXT01.pdf (accessed on 6 February 2019).
- Renkema, D.J. Validation of Wind Turbine Wake Models. Master’s Thesis, Faculty of Aerospace Engineering, TU Delft, Delft, The Netherlands, 2007. [Google Scholar]
- Park, J.; Kwon, S.; Law, K.H. Wind Farm Power Maximization Based on a Cooperative Static Game Approach. Available online: https://pdfs.semanticscholar.org/8fa6/c5709a61edd3a54e9a09303086fa93d73e2d.pdf (accessed on 6 February 2019).
- Ahmad, T.; Matthews, P.; Kazemtabrizi, B. PSO Based Wind Farm Controller. In Proceedings of the 11th Edition of the International Conference on Evolutionary and Deterministic Methods for Design, Optimization and Control with Applications to Industrial and Societal Problems (EUROGEN-2015), Glasgow, UK, 14–16 September 2015; pp. 277–283. [Google Scholar]
- González, J.S.; Payán, M.B.; Santos, J.R.; Rodríguez, Á.G.G. Maximizing the overall production of wind farms by setting the individual operating point of wind turbines. Renew. Energy 2015, 80, 219–229. [Google Scholar] [CrossRef]
- Marden, J.R.; Ruben, S.D.; Pao, L.Y. Surveying game theoretic approaches for wind farm optimization. In Proceedings of the AIAA Aerospace Sciences Meeting, Nashville, TN, USA, 9–12 January 2012; pp. 1–10. [Google Scholar]
- Burton, T.; Sharpe, D.; Jenkins, N.; Bossanyi, E. Wind Energy Handbook; John Wiley & Sons: Hoboken, NJ, USA, 2001. [Google Scholar]
- Steinbuch, M.; de Boer, W.; Bosgra, O.; Peters, S.; Ploeg, J. Optimal control of wind power plants. J. Wind Eng. Ind. Aerodyn. 1988, 27, 237–246. [Google Scholar] [CrossRef]
- Corten, G.; Schaak, P.; Bot, E. More power and less loads in wind farms: Heat and Flux. In Proceedings of the European Wind Energy Conference & Exhibition, London, UK, 22–25 November 2004. [Google Scholar]
- Soleimanzadeh, M.; Brand, A.J.; Wisniewski, R. A wind farm controller for load and power optimization in a farm. In Proceedings of the 2011 IEEE International Symposium on Computer-Aided Control System Design (CACSD), Denver, CO, USA, 28–30 September 2011; Volume 186, pp. 1202–1207. [Google Scholar]
- Soleimanzadeh, M.; Wisniewski, R. Controller design for a wind farm, considering both power and load aspects. Mechatronics 2011, 21, 720–727. [Google Scholar] [CrossRef]
- Odgaard, P.F.; Baekgaard, M.; Astrup, B. Model based control of wind parks. In Proceedings of the EWEC Conference, Warsaw, Poland, 20–23 April 2010. [Google Scholar]
- Spudic, V.; Jelavic, M.; Baotic, M.; Peric, N. Hierarchical wind farm control for power/load optimization. In Proceedings of the Science of making Torque from Wind (Torque2010), Heraklion, Greece, 28–30 June 2010. [Google Scholar]
- Spudic, V.; Baotic, M.; Peric, N. Wind farm load reduction via parametric programming based controller design. In Proceedings of the 18th IFAC World Congress, Milan, Italy, 28 August–2 September 2011. [Google Scholar]
- Spudić, V.; Jelavić, M.; Baotić, M. Wind turbine power references in coordinated control of wind farms. Automatika 2011, 52, 82–94. [Google Scholar] [CrossRef]
- Gebraad, P.; Teeuwisse, F.; Van Wingerden, J.; Fleming, P.A.; Ruben, S.; Marden, J.; Pao, L. Wind plant power optimization through yaw control using a parametric model for wake effects—A CFD simulation study. Wind Energy 2016, 19, 95–114. [Google Scholar] [CrossRef]
- Gebraad, P.; van Wingerden, J. Maximum power-point tracking control for wind farms. Wind Energy 2015, 18, 429–447. [Google Scholar] [CrossRef]
- Spruce, C.J. Simulation and Control of Windfarms. Ph.D. Thesis, University of Oxford, Oxford, UK, 1993. [Google Scholar]
- Knudsen, T.; Bak, T.; Svenstrup, M. Survey of wind farm control power and fatigue optimization. Wind Energy 2015, 18, 1333–1351. [Google Scholar] [CrossRef]
- Qian, G.W.; Ishihara, T. A New Analytical Wake Model for Yawed Wind Turbines. Energies 2018, 11, 665. [Google Scholar] [CrossRef]
- Marathe, N.; Swift, A.; Hirth, B.; Walker, R.; Schroeder, J. Characterizing power performance and wake of a wind turbine under yaw and blade pitch. Wind Energy 2016, 19, 963–978. [Google Scholar] [CrossRef]
- Wan, S.; Cheng, L.; Sheng, X. Effects of yaw error on wind turbine running characteristics based on the equivalent wind speed model. Energies 2015, 8, 6286–6301. [Google Scholar] [CrossRef]
- Park, J.; Law, K.H. A data-driven, cooperative wind farm control to maximize the total power production. Appl. Energy 2016, 165, 151–165. [Google Scholar] [CrossRef]
- Boorsma, K. Power and Loads for Wind Turbines in Yawed Conditions; Technical Report, ECN-E-12-047; ECN: Petten, The Netherlands, 2012. [Google Scholar]
- Annoni, J.; Fleming, P.; Scholbrock, A.; Roadman, J.; Dana, S.; Adcock, C.; Porte-Agel, F.; Raach, S.; Haizmann, F.; Schlipf, D. Analysis of Control-Oriented Wake Modeling Tools Using Lidar Field Results; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2018.
- Wagenaar, J.; Machielse, L.; Schepers, J. Controlling wind in ECN scaled wind farm. In Proceedings of the Europe Premier Wind Energy Event, Copenhagen, Denmark, 16–19 April 2012; pp. 685–694. [Google Scholar]
- Schram, C.; Vyas, P. Windpark Turbine Control System and Method for Wind Condition Estimation and Performance Optimization. U.S. Patent App. 11/288,081, 31 May 2007. [Google Scholar]
- Kanev, S.; Savenije, F. Active Wake Control: Loads Trends; Technical Report ECN-E–15-004; ECN: Petten, The Netherlands, 2015. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Kennedy, J. Small worlds and mega-minds: Effects of neighborhood topology on particle swarm performance. In Proceedings of the 1999 Congress on Evolutionary Computation (CEC 99), Washington, DC, USA, 6–9 July 1999; Volume 3. [Google Scholar]
- Kennedy, J.; Mendes, R. Population structure and particle swarm performance. In Proceedings of the 2002 Congress on Evolutionary Computation, Honolulu, HI, USA, 12–17 May 2002; Available online: http://repositorium.sdum.uminho.pt/bitstream/1822/2291/1/wcci2002.pdf (accessed on 6 February 2019).
- Shi, Y. Particle swarm optimization. IEEE Connect. 2004, 2, 8–13. [Google Scholar]
- Rienecker, M.M.; Suarez, M.J.; Gelaro, R.; Todling, R.; Bacmeister, J.; Liu, E.; Bosilovich, M.G.; Schubert, S.D.; Takacs, L.; Kim, G.K.; et al. MERRA: NASA’s modern-era retrospective analysis for research and applications. J. Clim. 2011, 24, 3624–3648. [Google Scholar] [CrossRef]
- Moriarty, P.; Rodrigo, J.S.; Gancarski, P.; Chuchfield, M.; Naughton, J.W.; Hansen, K.S.; Machefaux, E.; Maguire, E.; Castellani, F.; Terzi, L.; et al. IEA-Task 31 WAKEBENCH: Towards a protocol for wind farm flow model evaluation. Part 2: Wind farm wake models. J. Phys. Conf. Ser. 2014, 524, 012185. [Google Scholar] [CrossRef] [Green Version]
- Thørgersen, M.; Sørensen, T.; Nielsen, P.; Grötzner, A.; Chun, S. WindPRO/PARK: Introduction to Wind Turbine Wake Modelling and Wake Generated Turbulence; EMD International A/S: Aalborg, Denmark, 2005; Available online: http://www.emd.dk/files/windpro/manuals/for_print/Appendices-all_UK.pdf (accessed on 6 February 2019).
- Bueno Gayo, J. ReliaWind Project Final Report; Technical Report Project Nr 212966; Gamesa Innovation and Technology: 2011. Available online: https://setis.ec.europa.eu/energy-research/sites/default/files/project/docs/Publishable%20Summary%20-%20110513_Reliawind_Final%20Publishable%20Summary%20to%20EC.pdf (accessed on 6 February 2019).
- Rohatgi, A. WebPlotDigitizer. Available online: http://arohatgi.info/WebPlotDigitizer/ (accessed on 1 February 2019).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wind Direction | Figure 4a | j | |
|---|---|---|---|
| North-west | 3 | Row-8 (3 turbines) | |
| South-west | 3 | Row-2 to row-4 (last turbine in each row) | |
| North east | 5 | Row-1 to row-5 (first turbine in each row) | |
| South-east | 7 | Row-1 (Seven turbines) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmad, T.; Basit, A.; Anwar, J.; Coupiac, O.; Kazemtabrizi, B.; Matthews, P.C. Fast Processing Intelligent Wind Farm Controller for Production Maximisation. Energies 2019, 12, 544. https://doi.org/10.3390/en12030544
Ahmad T, Basit A, Anwar J, Coupiac O, Kazemtabrizi B, Matthews PC. Fast Processing Intelligent Wind Farm Controller for Production Maximisation. Energies. 2019; 12(3):544. https://doi.org/10.3390/en12030544
Chicago/Turabian StyleAhmad, Tanvir, Abdul Basit, Juveria Anwar, Olivier Coupiac, Behzad Kazemtabrizi, and Peter C. Matthews. 2019. "Fast Processing Intelligent Wind Farm Controller for Production Maximisation" Energies 12, no. 3: 544. https://doi.org/10.3390/en12030544