
Multi-Objective Decentralized Model Predictive Control for Inverter Air Conditioner Control of Indoor Temperature and Frequency Stabilization in Microgrid

Abstract
:1. Introduction
1.1. Motivation
1.2. Literature Review
1.3. Methodology and Contributions
- (1)
- With multiple objectives (frequency deviation and indoor temperature deviation) of the controlling, the power consumption of IACs is able to maintain the indoor temperature inside the preferable range while regulating the frequency deviation.
- (2)
- The temperature weights of multi-objective DMPC are optimized by the firefly algorithm (FA) to minimize the frequency deviation and control the indoor temperature, which varied inside the preference ranges.
- (3)
- The proposed multi-objective DMPC is able to control the power consumption of a varied number of IACs and produce various ranges of temperature deviation satisfied with IACs owner preference.
- (4)
- This is the first paper that deals with controlling indoor temperature and frequency deviation simultaneously. The proposed method can apply to the microgrid, which does not have any energy storage system and operates at a severe frequency fluctuation. The IAC owners can decide whether or not to use their IACs for frequency regulation. Therefore, the power system is more stable by the multi-objective DMPC control IACs, in comparison to the conventional IAC load in the microgrid.
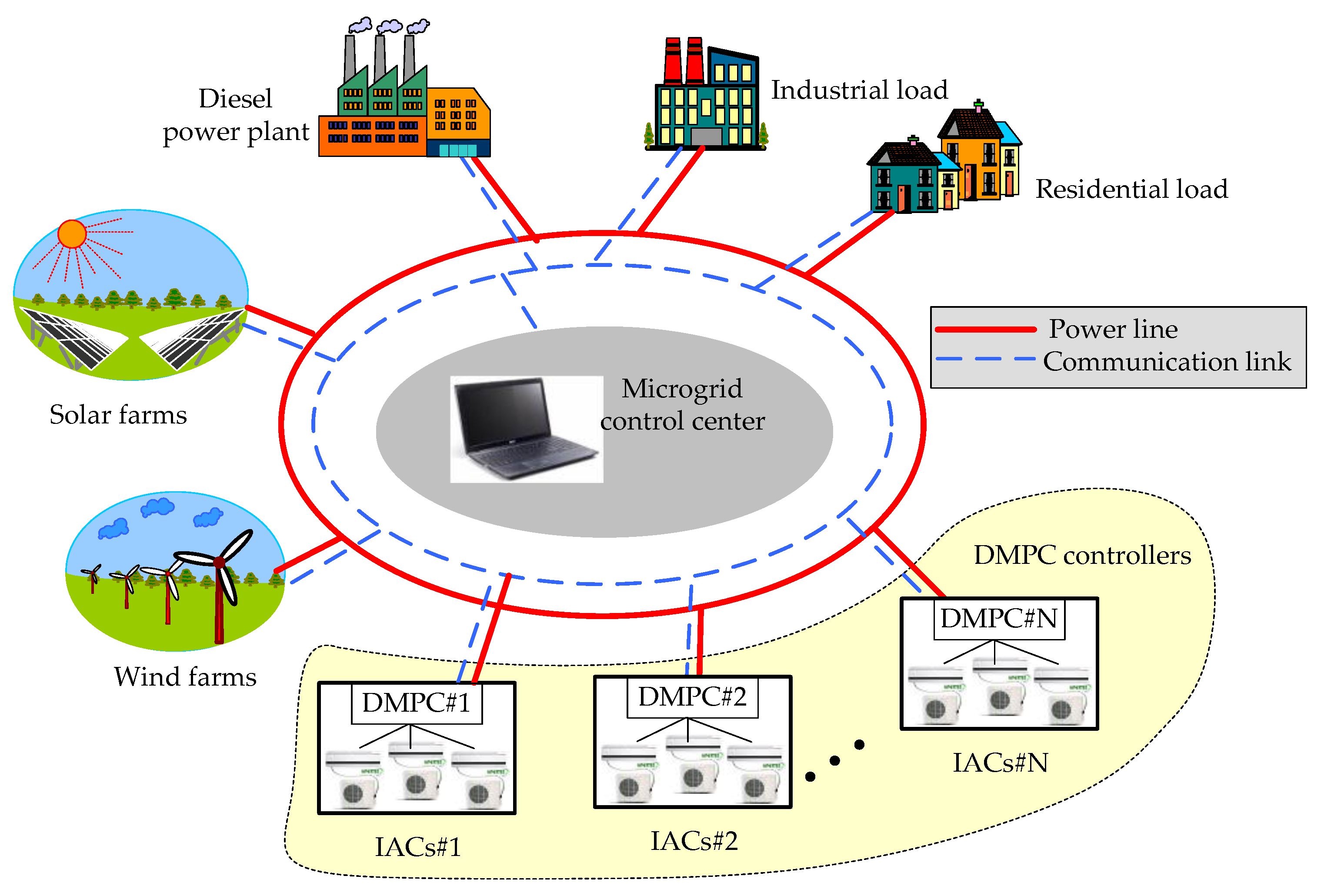
2. Microgrid and Its Model
2.1. Microgrid
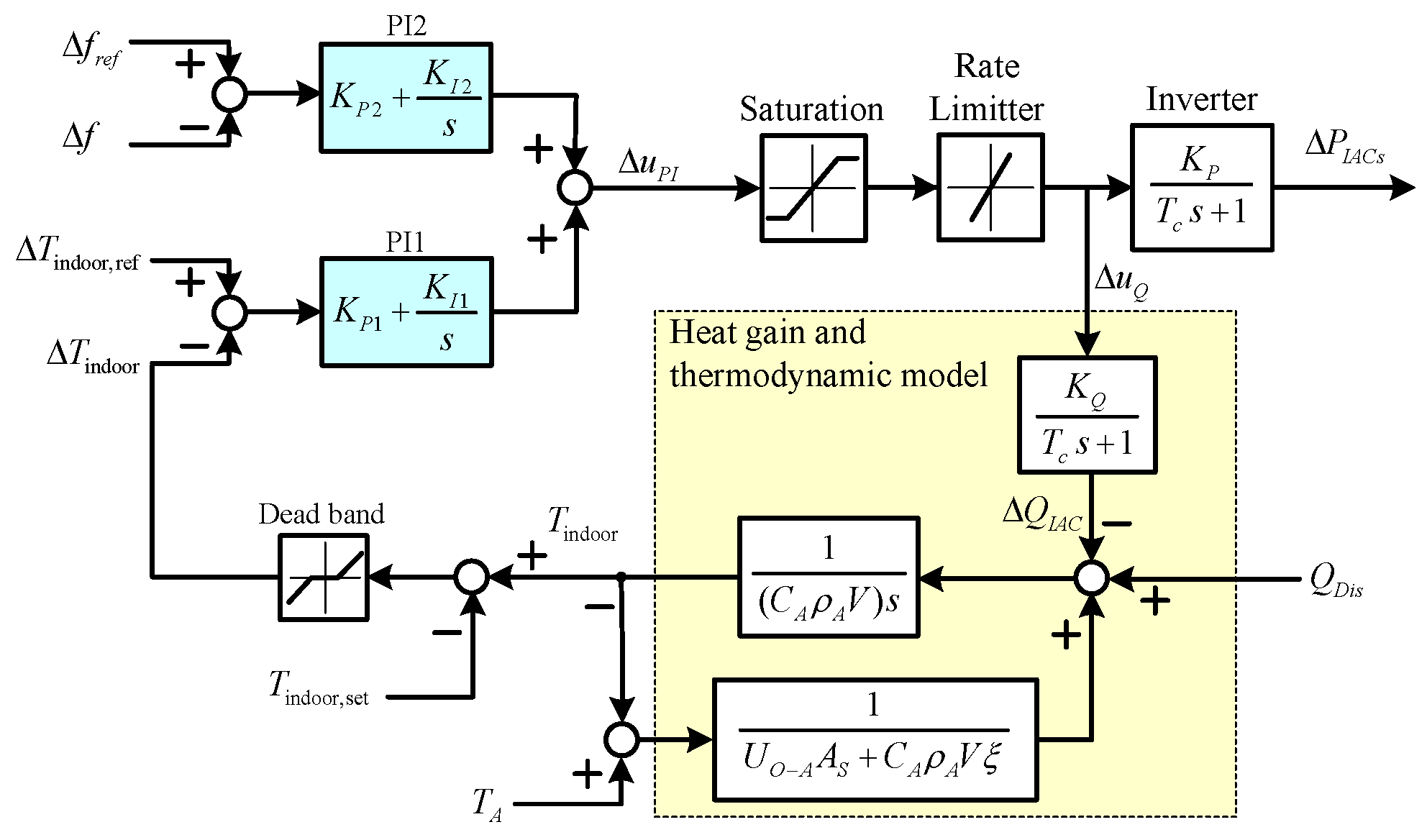
2.2. IAC Model
- (1)
- The thermal model of a room is developed to study the operating characteristics of IACs. The thermal model of a room is a model, which describes the relationship between the room temperature and the thermal deviation of the room from the refrigerating capacity of the IACs. The room temperature () can be defined as
- (2)
- The electrical model of IACs is provided using inverter interfaced IACs. The IAC’s compressor can change the speed continuously by adjusting the operating frequency. The operating power and refrigerating capacity are regulated with the operating frequency and can be expressed as
2.3. IACs for Primary Frequency Control
3. Multi-Objective DMPC for IACs Control
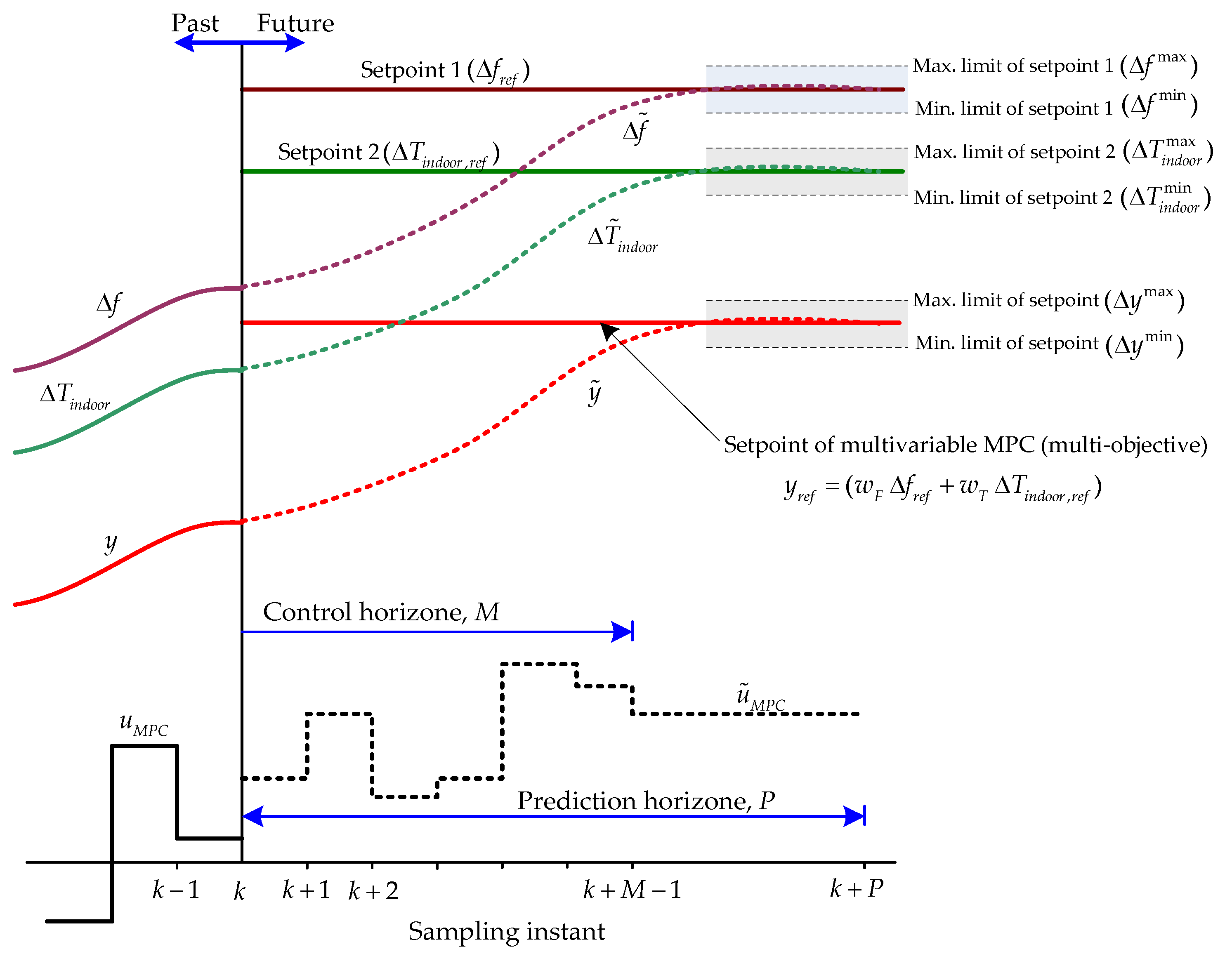
3.1. MPC Method
3.2. Decentralized MPC
3.3. Multi-Objective DMPC for IACs Control
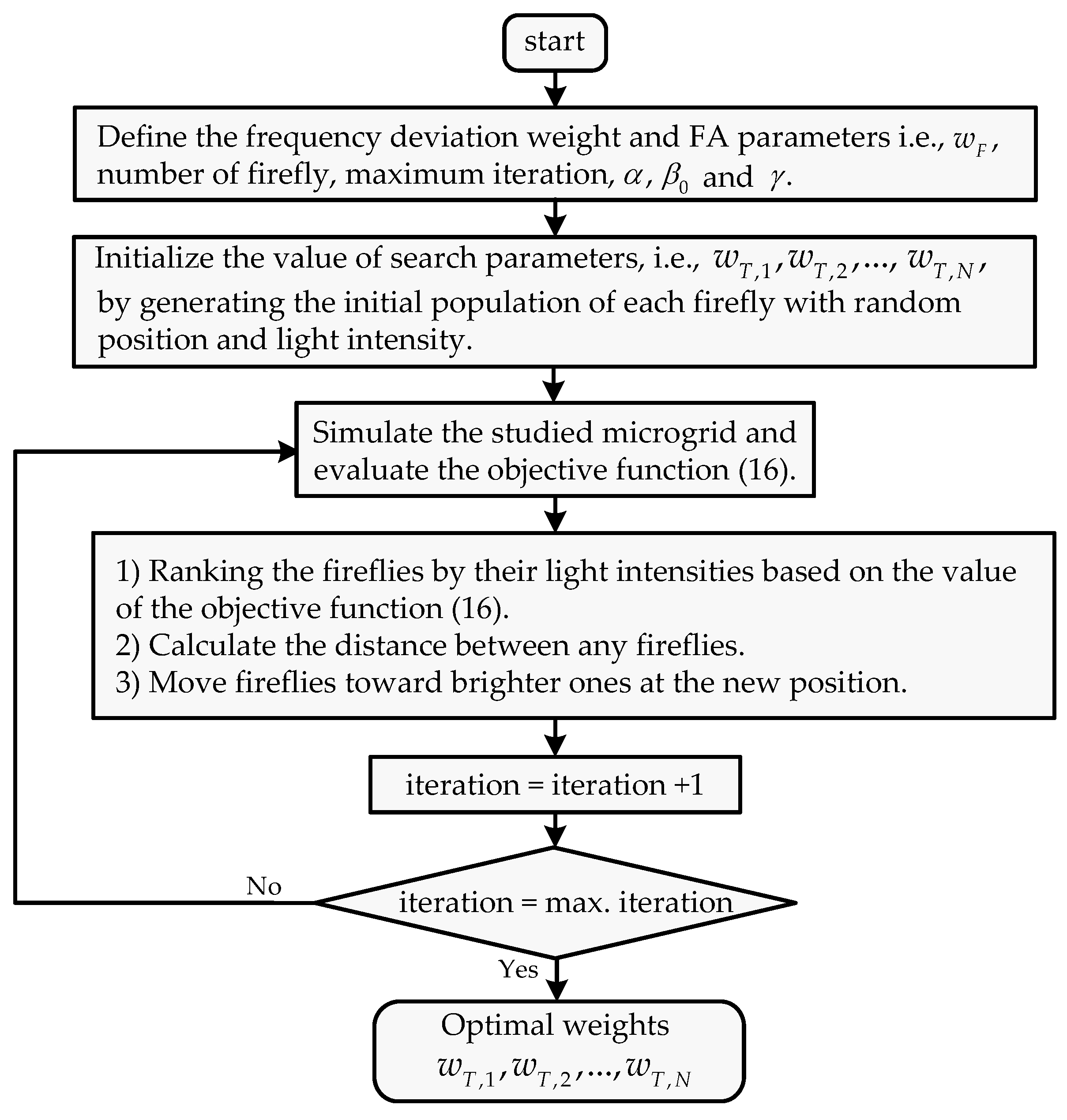
3.4. Weight Tuning of Multi-Objective DMPC
4. Simulation Results
5. Conclusions
- (1)
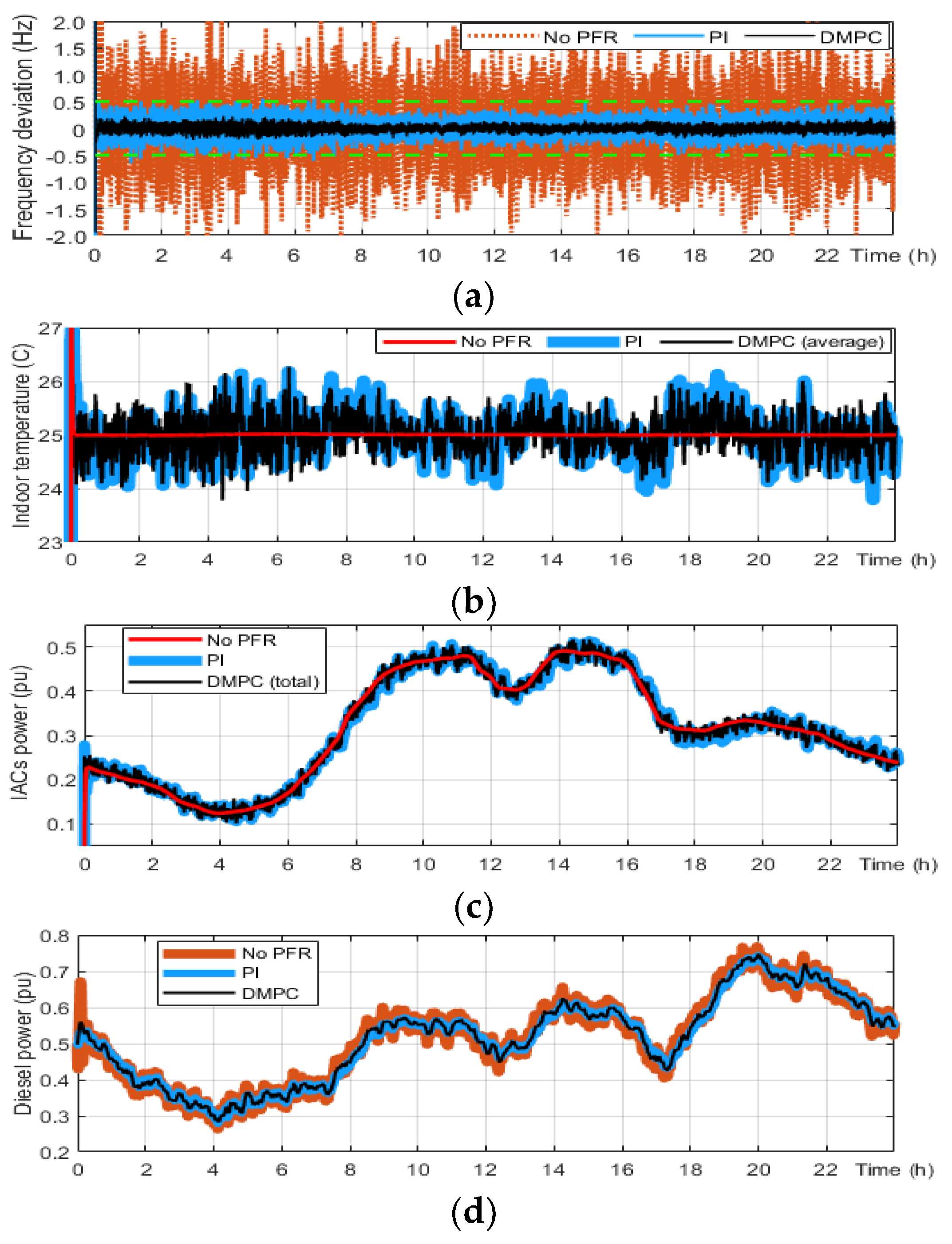
- The controlling of IAC power consumption is used to suppress the frequency deviation of microgrid with high penetration of wind and PV generators.
- (2)
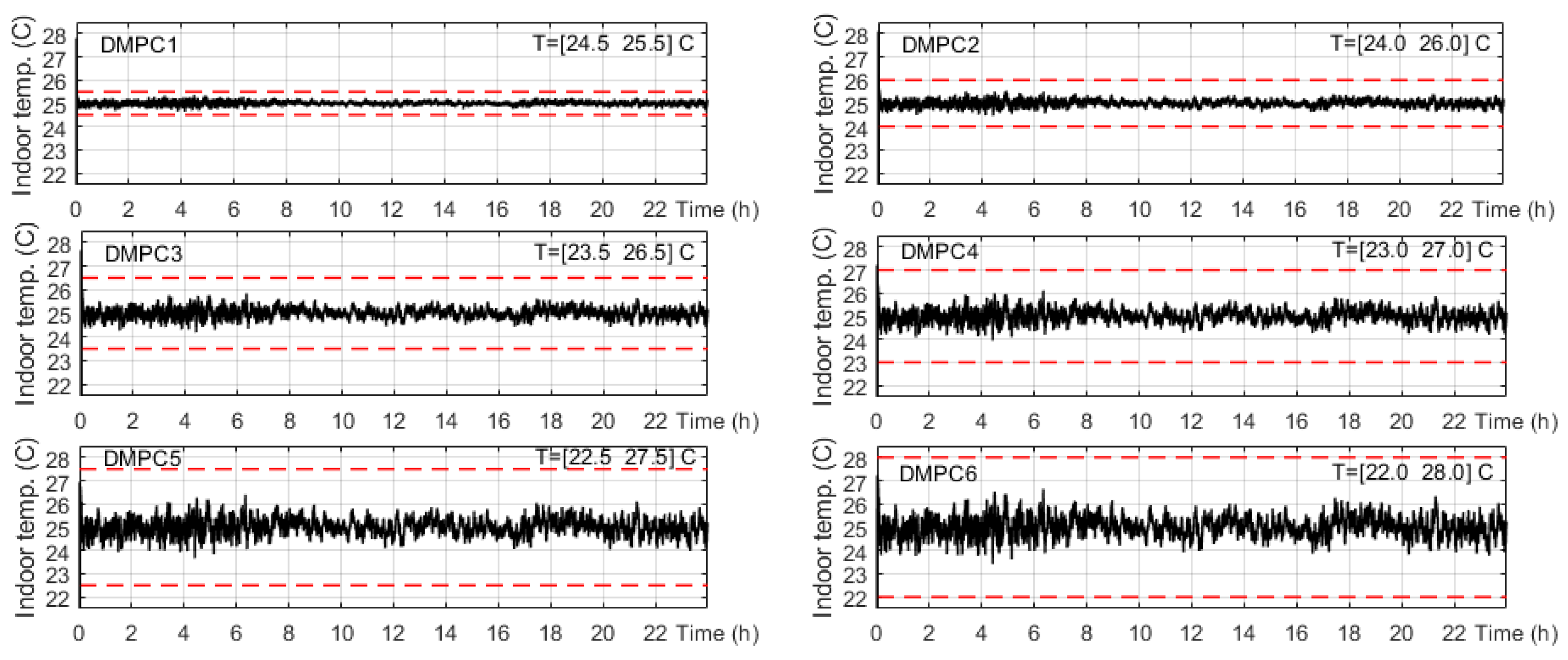
- The multi-objective DMPC is used to control the power consumption of the six IAC groups classified by acceptable variation of the indoor temperature range.
- (3)
- In the multi-objective DMPC design procedure, the weights of temperature deviation of the six IACs groups are optimized using the firefly algorithm (FA) to minimize the integral absolute frequency deviation and maintain the indoor temperature inside the acceptable ranges.
- (4)
- Simulation results on the studied microgrid demonstrate that the DMPC is able to suppress the frequency variation and control the temperature deviation concurrently when the temperature setting is constant and adjusted.
- (5)
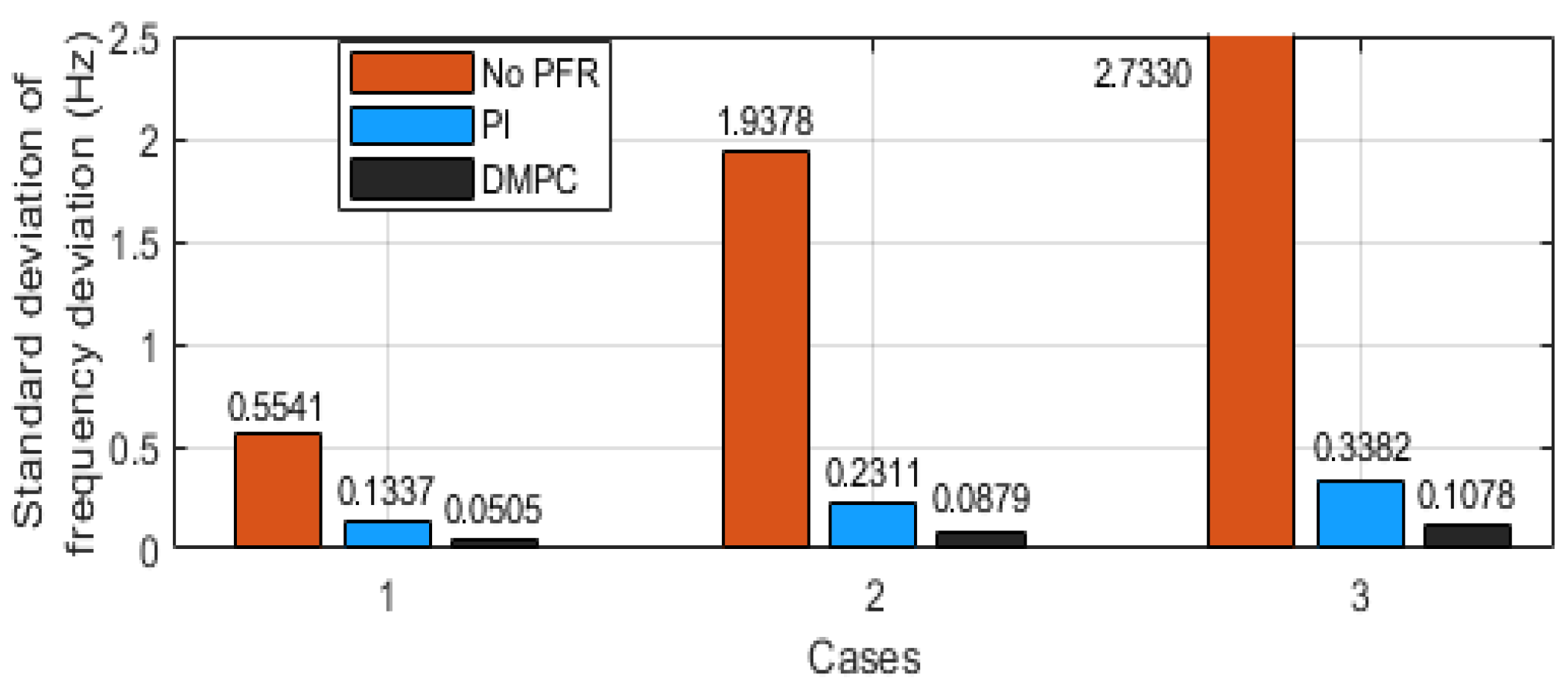
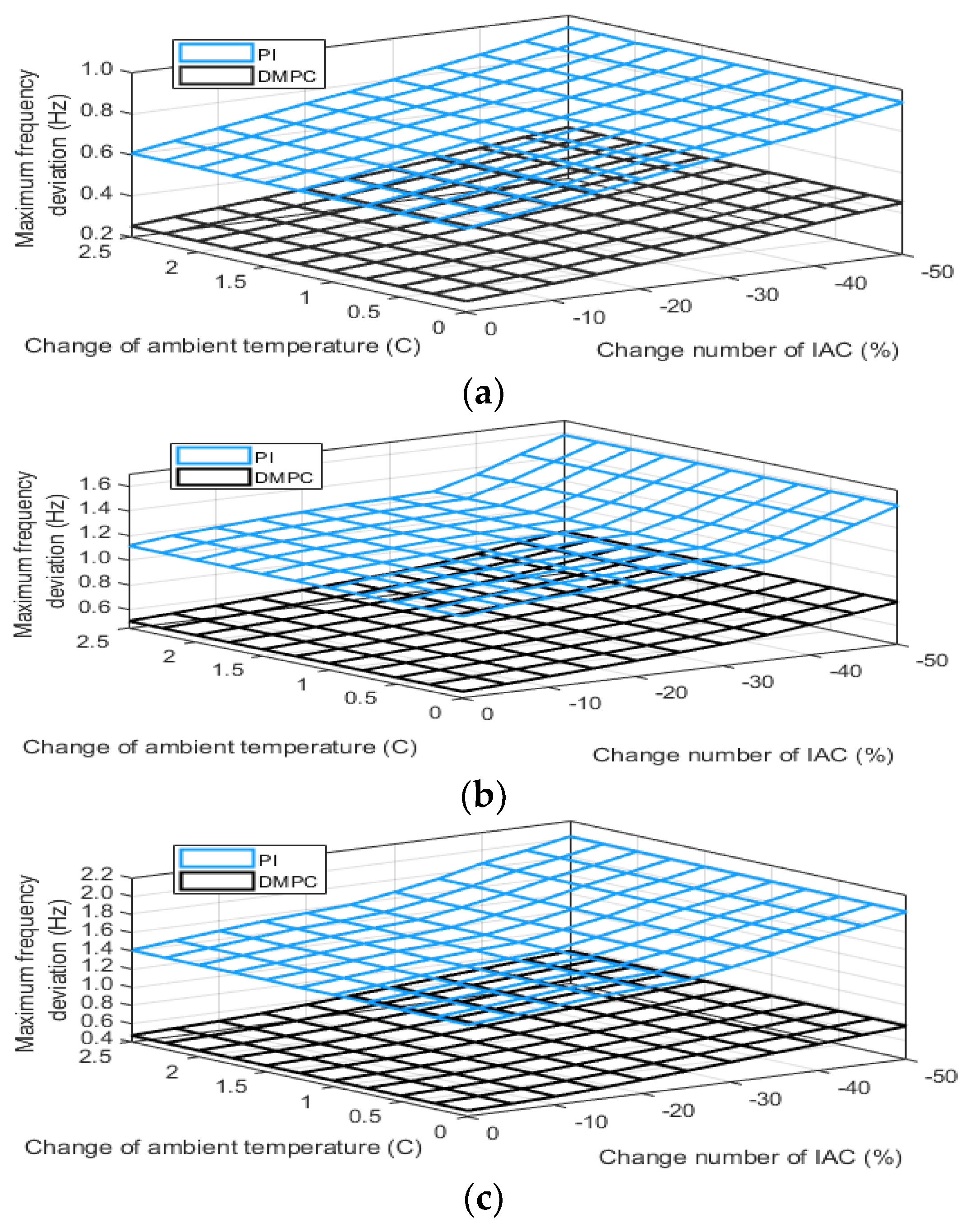
- The DMPC is able to reduce frequency deviation, satisfying indoor temperature preferences, and is robust to the various number of IACs, over the proportional-integral PI controller.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| AC | Air conditioner |
| BESS | Battery energy storage system |
| DG | Distributed generation |
| DMPC | Decentralized model predictive control |
| FA | Firefly algorithm |
| IAC | Inverter air conditioner |
| MG | Microgrid |
| MPC | Model predictive control |
| PFR | Primary frequency regulation |
| PHEV | Plug-in hybrid electric vehicle |
| PI | Proportional integral |
| PMSG | Permanent magnet synchronous generator |
| PV | Photovoltaic |
| RES | Renewable energy sources |
| RoCoF | Rate of change of frequency |
| SG | Synchronous generator |
| VSG | Virtual synchronous generator |
References
- Han, Y.; Li, H.; Shen, P.; Coelho, E.A.A.; Guerrero, J.M. Review of active and reactive power sharing strategies in hierarchical controlled microgrids. IEEE Trans. Power Electron. 2017, 32, 2427–2451. [Google Scholar] [CrossRef] [Green Version]
- Bose, U.; Chattopadhyay, S.K.; Chakraborty, C.; Pal, B. A novel method of frequency regulation in microgrid. IEEE Trans. Ind. Appl. 2019, 55, 111–121. [Google Scholar] [CrossRef]
- Hajimiragha, A.H.; Zadeh, M.R.D.; Moazeni, S. Microgrids Frequency Control Considerations Within the Framework of the Optimal Generation Scheduling Problem. IEEE Trans. Smart Grid 2014, 6, 534–547. [Google Scholar] [CrossRef]
- Technical Advice on Performance Standards for Stand-Alone Power Systems. Australian Energy Market Commission, 14 April 2020, Project Number: 12526485. Available online: https://www.aemc.gov.au/sites/default/files/2020-05/GHD%20Report%20-%20AEMC%20Performance%20standards%20for%20SAPS%202020.04.14.pdf (accessed on 16 October 2021).
- IEEE 1547.4-2011—IEEE Guide for Design, Operation, and Integration of Distributed Resource Island Systems with Electric Power Systems. IEEE Standards Coordinating Committee 21, USA. 20 July 2011. Available online: https://ieeexplore.ieee.org/servlet/opac?punumber=5960749 (accessed on 16 October 2021).
- Lasseter, R.H.; Paigi, P. Microgrid: A conceptual solution. In Proceedings of the 2004 IEEE 35th Annual Power Electronics Specialists Conf. (IEEE Cat. No.04CH37551), Aachen, Germany, 20–25 June 2004; Volume 6, pp. 4285–4290. [Google Scholar]
- Ahmethodzic, L.; Music, M. Comprehensive review of trends in microgrid control. Renew. Energy Focus 2021, 38, 84–96. [Google Scholar] [CrossRef]
- Sitompul, S.; Fujita, G. Impact of Advanced Load-Frequency Control on Optimal Size of Battery Energy Storage in Islanded Microgrid System. Energies 2021, 14, 2213. [Google Scholar] [CrossRef]
- Mazzeo, D.; Matera, N.; De Luca, P.; Baglivo, C.; Congedo, P.M.; Oliveti, G. A literature review and statistical analysis of photovoltaic-wind hybrid renewable system research by considering the most relevant 550 articles: An upgradable matrix literature database. J. Clean. Prod. 2021, 295, 126070. [Google Scholar] [CrossRef]
- Fang, J.; Li, H.; Tang, Y.; Blaabjerg, F. On the Inertia of Future More-Electronics Power Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 2130–2146. [Google Scholar] [CrossRef]
- Othman, M.H.; Mokhlis, H.; Mubin, M.; Talpur, S.; Aziz, N.F.A.; Dradi, M.; Mohamad, H. Progress in control and coordination of energy storage system-based VSG: A review. IET Renew. Power Gener. 2020, 14, 177–187. [Google Scholar] [CrossRef]
- Pahasa, J.; Ngamroo, I. Coordinated PHEV, PV, and ESS for Microgrid Frequency Regulation Using Centralized Model Predictive Control Considering Variation of PHEV Number. IEEE Access 2018, 6, 69151–69161. [Google Scholar] [CrossRef]
- Zhang, W.; Lian, J.; Chang, C.; Kalsi, K. Aggregated modeling and control of air conditioning loads for demand response. IEEE Trans. Power Syst. 2013, 28, 4655–4664. [Google Scholar] [CrossRef]
- Palensky, P.; Dietrich, D. Demand Side Management: Demand Response, Intelligent Energy Systems, and Smart Loads. IEEE Trans. Ind. Inform. 2011, 7, 381–388. [Google Scholar] [CrossRef] [Green Version]
- Song, M.; Gao, C.; Yan, H.; Yang, J. Thermal Battery Modeling of Inverter Air Conditioning for Demand Response. IEEE Trans. Smart Grid 2018, 9, 5522–5534. [Google Scholar] [CrossRef]
- Hui, H.; Ding, Y.; Liu, W.; Lin, Y.; Song, Y. Operating reserve evaluation of aggregated air conditioners. Appl. Energy 2017, 196, 218–228. [Google Scholar] [CrossRef]
- Mahdavi, N.; Braslavsky, J.H.; Seron, M.M.; West, S. Model Predictive Control of Distributed Air-Conditioning Loads to Compensate Fluctuations in Solar Power. IEEE Trans. Smart Grid 2017, 8, 3055–3065. [Google Scholar] [CrossRef]
- Shi, Q.; Li, F.; Liu, G.; Shi, D.; Yi, Z.; Wang, Z. Thermostatic load control for system frequency regulation considering daily demand profile and progressive recovery. IEEE Trans. Smart Grid 2019, 10, 6259–6270. [Google Scholar] [CrossRef]
- Mendieta, W.; Canizares, C.A. Primary Frequency Control in Isolated Microgrids Using Thermostatically Controllable Loads. IEEE Trans. Smart Grid 2021, 12, 93–105. [Google Scholar] [CrossRef]
- Hui, H.; Ding, Y.; Lin, Z.; Siano, P.; Song, Y. Capacity allocation and optimal control of inverter air conditioners considering area control error in multi-area power systems. IEEE Trans. Power Syst. 2020, 35, 332–345. [Google Scholar] [CrossRef]
- Jiang, T.; Ju, P.; Wang, C.; Li, H.; Liu, J. Coordinated control of air-conditioning loads for system frequency regulation. IEEE Trans. Smart Grid 2021, 12, 548–560. [Google Scholar] [CrossRef]
- Xiao, Y.; Su, Q.; Bresler, F.S.S.; Carroll, R.; Schmitt, J.R.; Olaleye, M. Performance-based regulation model in PJM wholesale markets. In Proceedings of the 2014 IEEE PES General Meeting|Conference & Exposition, National Harbor, MD, USA, 27–31 July 2014; pp. 1–5. [Google Scholar]
- Blum, D.H.; Zakula, T.; Norford, L.K. Opportunity cost quantification for ancillary services provided by heating, ventilating, and air-conditioning systems. IEEE Trans. Smart Grid 2017, 8, 1264–1273. [Google Scholar] [CrossRef]
- Li, W.; Du, P.; Lu, N. Design of a New Primary Frequency Control Market for Hosting Frequency Response Reserve Offers From Both Generators and Loads. IEEE Trans. Smart Grid 2017, 9, 4883–4892. [Google Scholar] [CrossRef]
- Maciejowski, J.M. Predictive Control with Constraints; Prentice-Hall: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Rossiter, J.A. Model-based Predictive Control: A Practical Approach; CRC Press: Boca Raton, FL, USA, 2003. [Google Scholar]
- Seborg, D.E.; Edgar, T.F.; Mellichamp, D.A. Process Dynamics and Control, 2nd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2003. [Google Scholar]
- Rawlings, J.B.; Mayne, D.Q. Model Predictive Control: Theory and Design; Nob Hill Publishing: Madison, WI, USA, 2009. [Google Scholar]
- Bemporad, A.; Ricker, N.L.; Morari, M. Model Predictive Control Toolbox™ User’s Guide; MATH WORKS Inc.: Natick, MA, USA, 2019. [Google Scholar]
- Zheng, Y.; Li, S.; Tan, R. Distributed Model Predictive Control for On-Connected Microgrid Power Management. IEEE Trans. Control. Syst. Technol. 2018, 26, 1028–1039. [Google Scholar] [CrossRef]
- Moradzadeh, M.; Boel, R.; Vandevelde, L. Voltage coordination in multi-area power systems via distributed model predictive control. IEEE Trans. Pow. Syst. 2013, 28, 513–521. [Google Scholar] [CrossRef] [Green Version]
- Ma, M.; Zhang, C.; Liu, X.; Chen, H. Distributed Model Predictive Load Frequency Control of the Multi-Area Power System after Deregulation. IEEE Trans. Ind. Electron. 2016, 64, 5129–5139. [Google Scholar] [CrossRef]
- Qin, S.; Chang, Y.; Xie, Z.; Li, S. Improved virtual inertia of PMSG-based wind turbines based on multi-objective model-predictive control. Energies 2021, 14, 3612. [Google Scholar] [CrossRef]
- Rafiee, A.; Batmani, Y.; Ahmadi, F.; Bevrani, H. Robust load-frequency control in islanded microgrids: Virtual synchronous generator concept and quantitative feedback theory. IEEE Trans. Power Syst. 2021, 36. [Google Scholar] [CrossRef]
- Kerdphol, T.; Rahman, F.S.; Watanabe, M.; Mitani, Y. Robust Virtual Inertia Control of a Low Inertia Microgrid Considering Frequency Measurement Effects. IEEE Access 2019, 7, 57550–57560. [Google Scholar] [CrossRef]
- Rakhshani, E.; Rodriguez, P. Inertia emulation in AC/DC interconnected power systems using derivative technique considering frequency measurement effects. IEEE Trans. Power Syst. 2017, 32, 3338–3351. [Google Scholar] [CrossRef]
- HHui, H.; Ding, Y.; Zheng, M. Equivalent Modeling of Inverter Air Conditioners for Providing Frequency Regulation Service. IEEE Trans. Ind. Electron. 2019, 66, 1413–1423. [Google Scholar] [CrossRef]
- Hui, H.; Ding, Y.; Chen, T.; Rahman, S.; Song, Y. Dynamic and Stability Analysis of the Power System with the Control Loop of Inverter Air Conditioners. IEEE Trans. Ind. Electron. 2021, 68, 2725–2736. [Google Scholar] [CrossRef]
- Yang, X.S. Engineering Optimisation: An Introduction with Metaheuristic Applications; Wiley: Hoboken, NJ, USA, 2010. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Reference frequency, (Hz) | 50 |
| Inertia constant, (s) | 0.1 |
| Damping characteristic of load, (pu) | 0.12 |
| Governor time constant, (s) | 0.1 |
| Turbine time constant, (s) | 0.4 |
| Primary droop factor, (Hz/pu.MW) | 0.4 |
| Secondary frequency controller, (s) | 0.1 |
| Total number of IAC (units) | 2000 |
| Capacity of IAC (kW) | 8 |
| Time constant of the compressor of the IACs, (s) | 0.02 |
| Compressor of the IACs gain, | 40 |
| Feedback heat gain of the IACs, | 120 |
(°C) | ||||
|---|---|---|---|---|
| 00.01–07.00 h | 07.01–18.00 h (Perfect PV/Non-Perfect PV) | 18.01–24.00 h | ||
| DMPC 1 | [−0.5 0.5] | 0.486 | 0.504/0.819 | 0.347 |
| DMPC 2 | [−1.0 1.0] | 0.293 | 0.301/0.502 | 0.283 |
| DMPC 3 | [−1.5 1.5] | 0.299 | 0.223/0.305 | 0.166 |
| DMPC 4 | [−2.0 2.0] | 0.161 | 0.167/0.235 | 0.115 |
| DMPC 5 | [−2.5 2.5] | 0.031 | 0.029/0.115 | 0.043 |
| DMPC 6 | [−3.0 3.0] | 0.012 | 0.023/0.105 | 0.014 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pahasa, J.; Potejana, P.; Ngamroo, I. Multi-Objective Decentralized Model Predictive Control for Inverter Air Conditioner Control of Indoor Temperature and Frequency Stabilization in Microgrid. Energies 2021, 14, 6969. https://doi.org/10.3390/en14216969
Pahasa J, Potejana P, Ngamroo I. Multi-Objective Decentralized Model Predictive Control for Inverter Air Conditioner Control of Indoor Temperature and Frequency Stabilization in Microgrid. Energies. 2021; 14(21):6969. https://doi.org/10.3390/en14216969
Chicago/Turabian StylePahasa, Jonglak, Potejanasak Potejana, and Issarachai Ngamroo. 2021. "Multi-Objective Decentralized Model Predictive Control for Inverter Air Conditioner Control of Indoor Temperature and Frequency Stabilization in Microgrid" Energies 14, no. 21: 6969. https://doi.org/10.3390/en14216969