
Comparative Study of Hysteresis Controller, Resonant Controller and Direct Torque Control of Five-Phase IM under Open-Phase Fault Operation

 ,
,  ,
,  and
and
Abstract
:1. Introduction
- The active FTC handles the system’s components faults (i.e., sensors, actuators, system structure itself) via the reconfiguration of the controller using the provided data by fault detection and diagnosis (FDD) units. For this reason, the active FTC is considered more accurate than the passive one.
- However, the active FTC requires much more time during execution; this can be inferred from the time taken by the FDD to send the collected information to the reconfigurable controller, and this also depends on the nature of the system’s fault.
- In the passive FTC, a set of possible failures besides the normal operating conditions are assumed known during the period of system design.
- The passive FTC does not require an FDD or a reconfigurable controller.
- The passive FTC depends only on the redundancies of the system and uses only one controller which is robust against the predefined set of failures.
- As a result, the passive FTC is considered much simpler but on the other hand, its robustness is much lower than the active FTC.
- Comparative study between three different control strategies, DTC, field-oriented control (FOC) based on resonant controller and hysteresis controller, which recently accomplished in pre-fault condition [36], and in this paper is drawn-out to the fault-tolerant situation.
- The advanced vision of the features of asymmetrical post-fault tolerance and its effect on the control performance are presented.
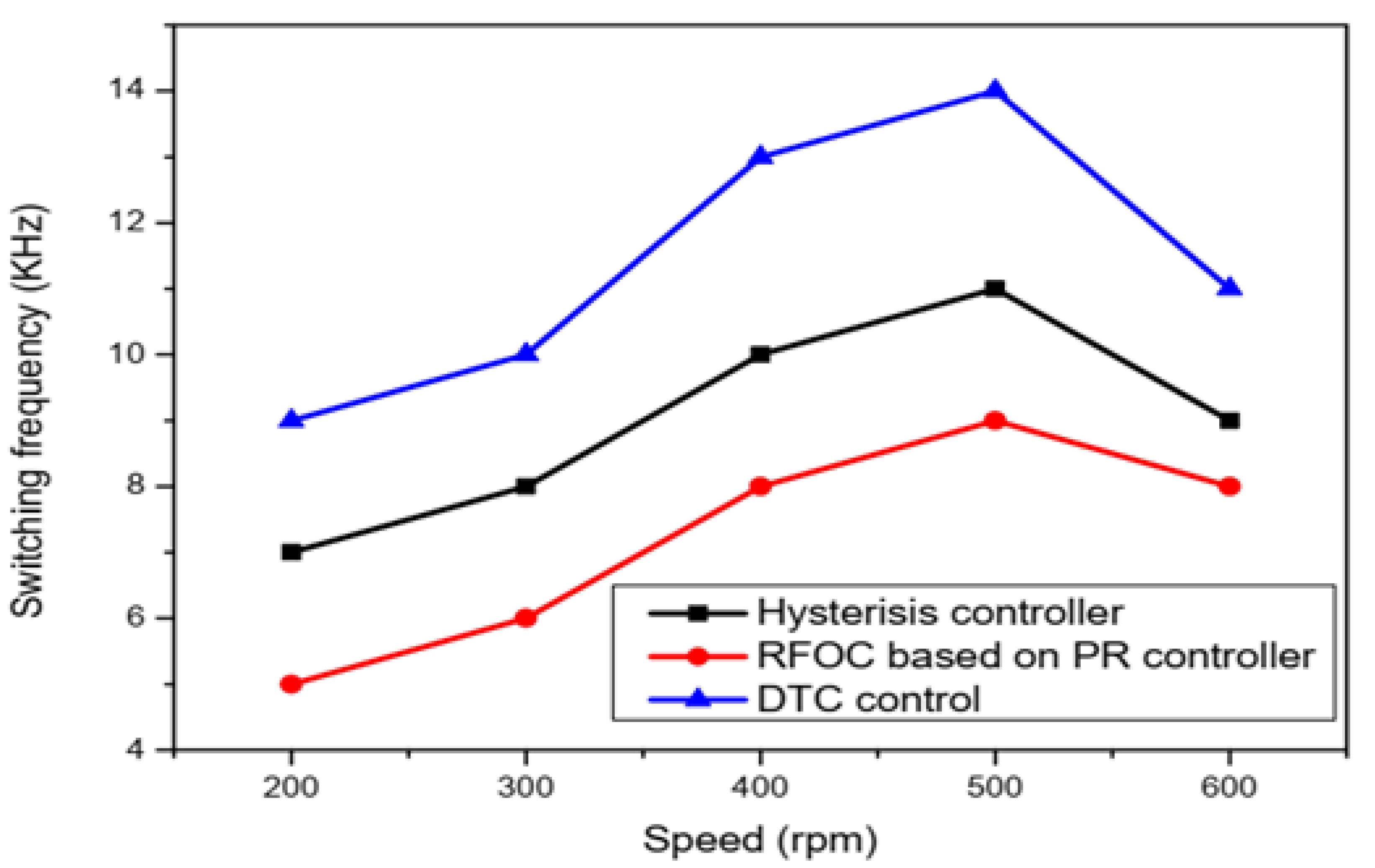
- The presented analysis outlines the features of different control techniques for the FPIM under open phase fault condition and itemize the most suitable one in terms of ripples reduction and switching frequency range.
2. Characteristic Analysis under Open Phase Fault Condition
2.1. Voltage Source Inverter
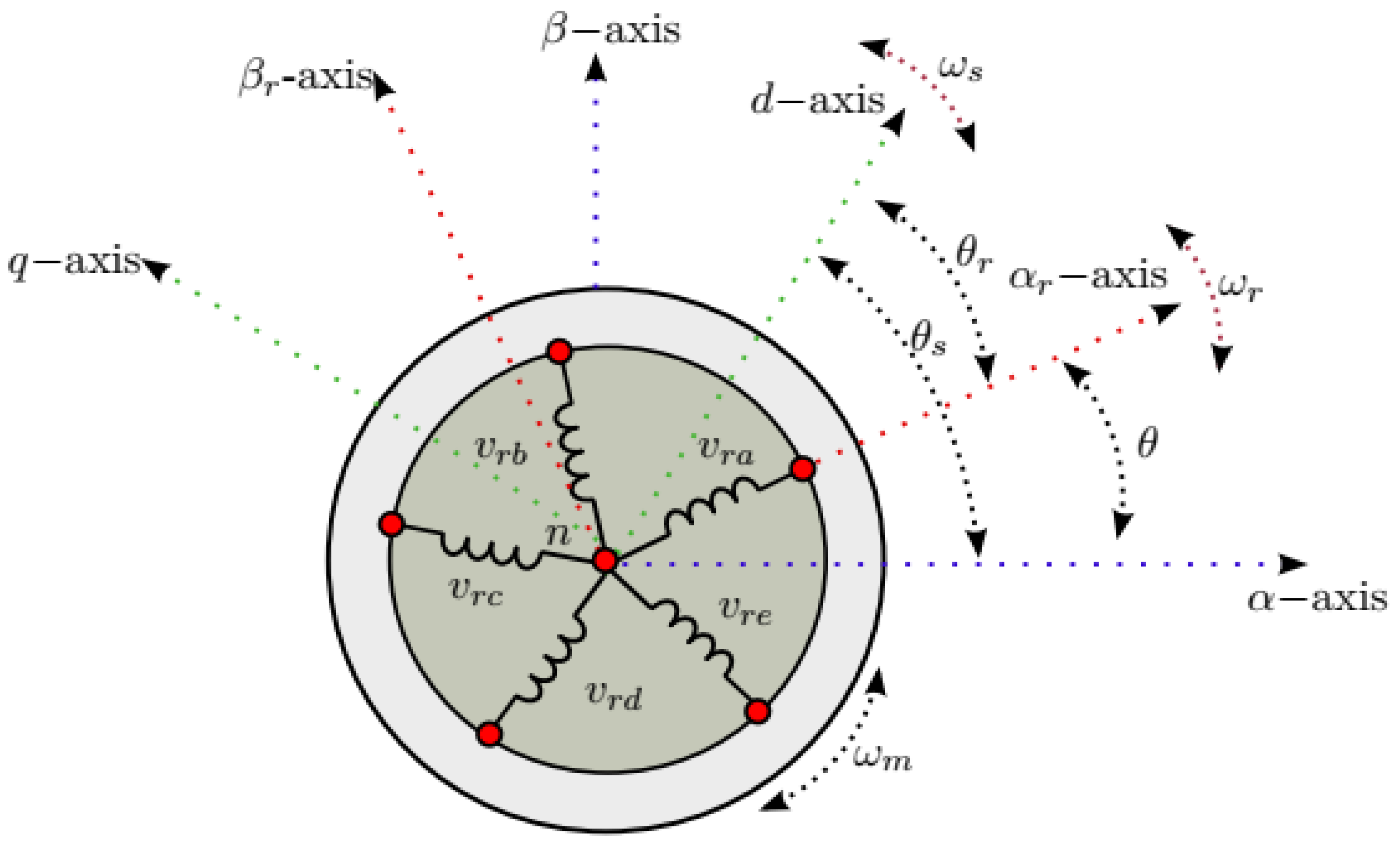
2.2. Five-Phase IM
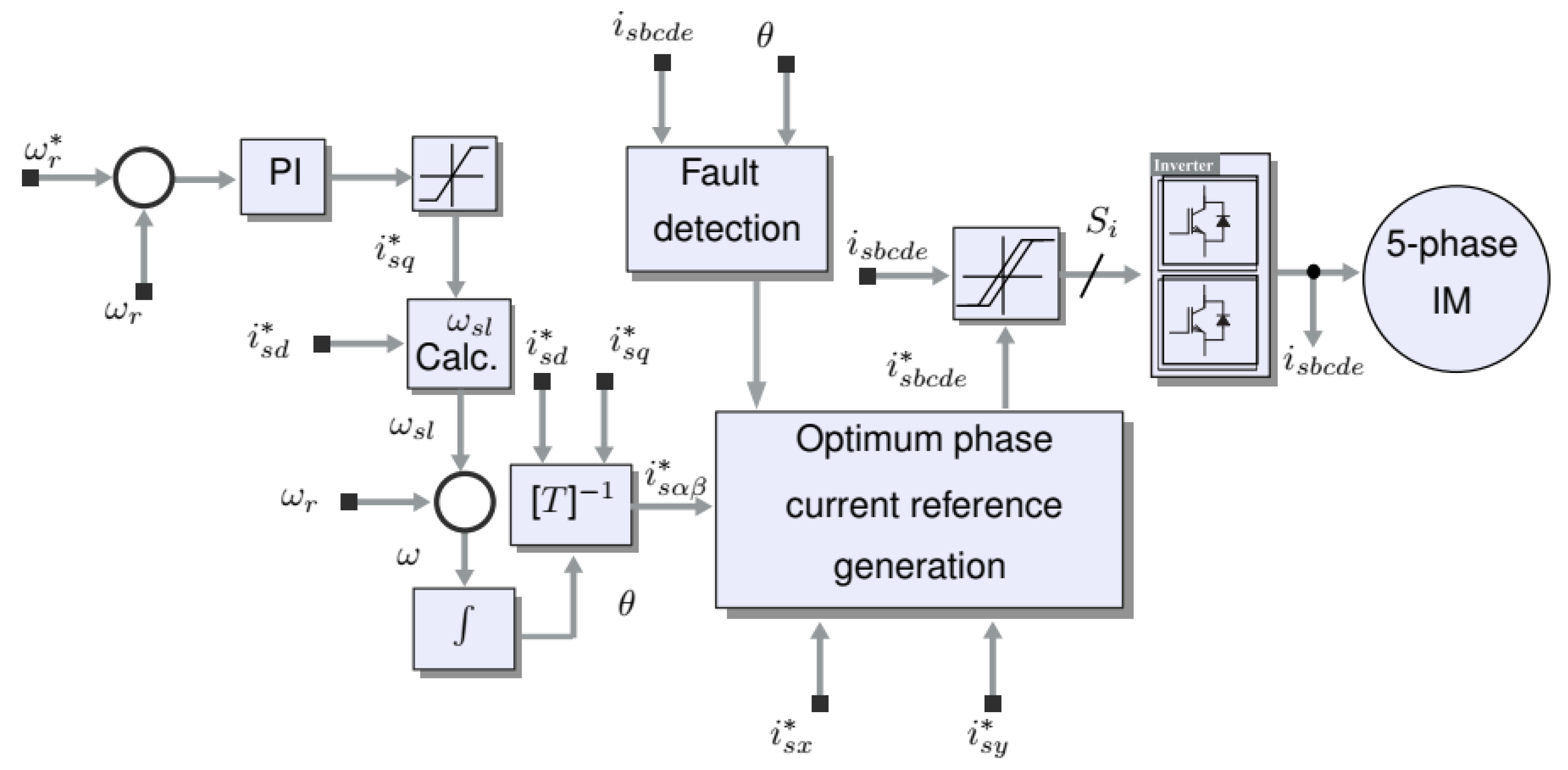
2.3. Post-Fault Current Reference Calculation
2.3.1. Minimum Derating (MD)
2.3.2. Minimum Copper Losses (ML)
3. Post-Fault Control Techniques and Comparative Study
3.1. Hysteresis Regulators
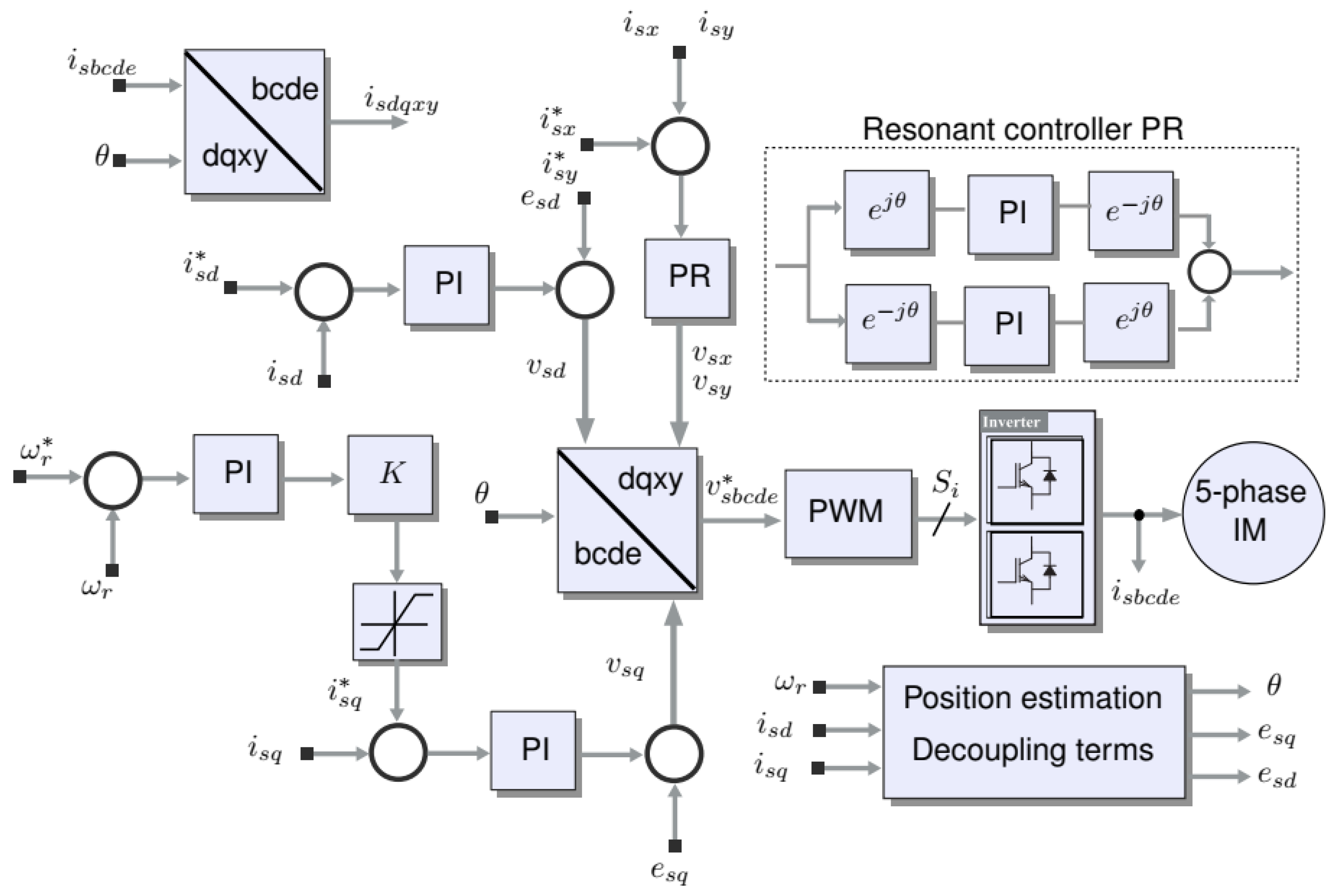
3.2. Field Oriented Control Using Resonant Controller
3.2.1. The PR Regulator Structure
3.2.2. Tuning of PR Regulators
- (a)
- Ultimate points for the frequency and gain are firstly determined.
- (b)
- The regulator parameters are selected such that
- The PI regulators which are used in the x–y frame must be resonant regulators and their parameters must be adjusted.
- The y-reference current must be replaced, according to the applied control in the post-fault operation, either to () for minimum losses or to (15) for minimum deration.
- The limitations for the α–β currents changes have to be modified according to either (17) for minimum losses or to (16) for minimum deration; this action can be realized through modifying the saturation limits of the anti wind-up PI current controllers.
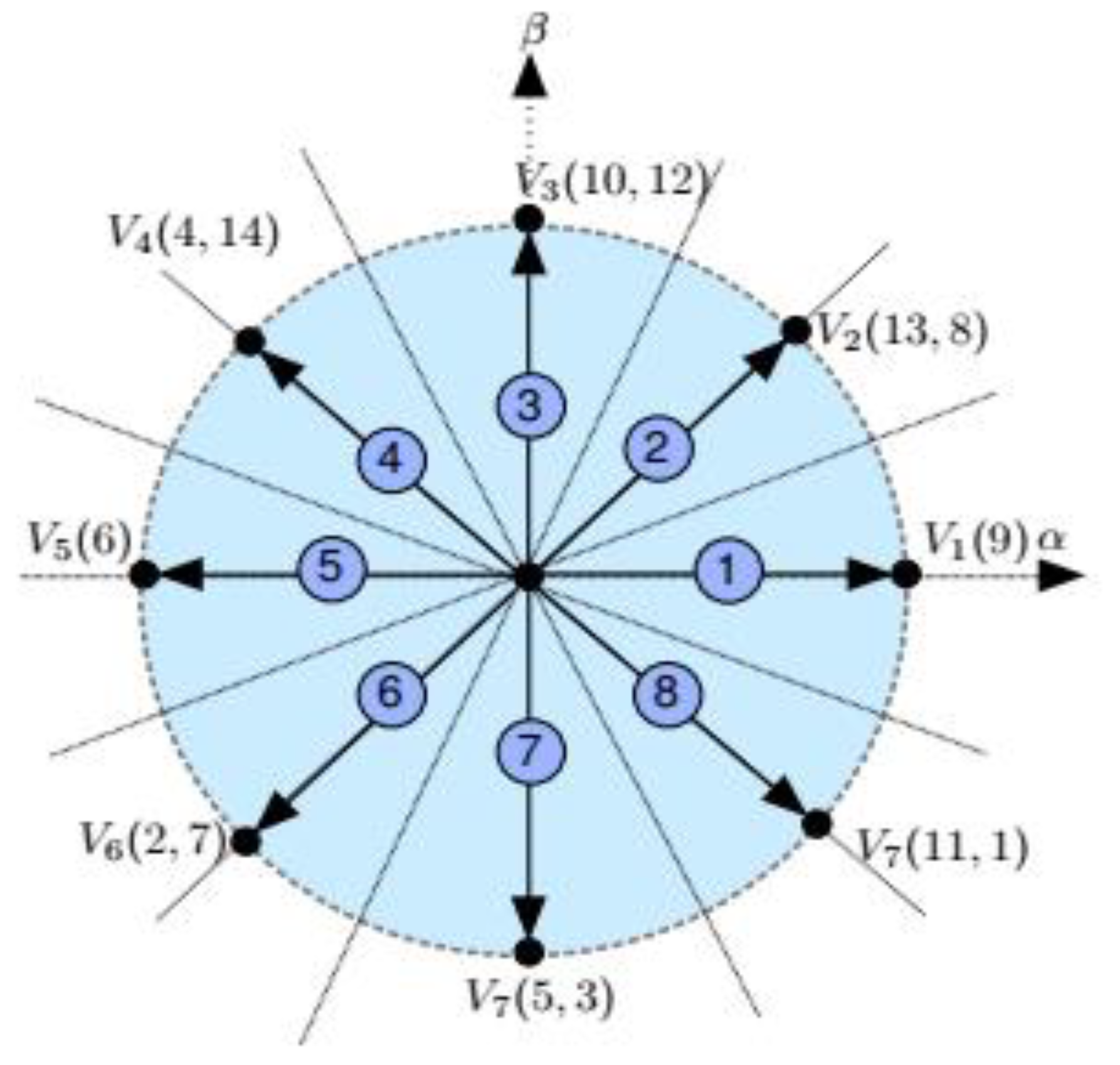
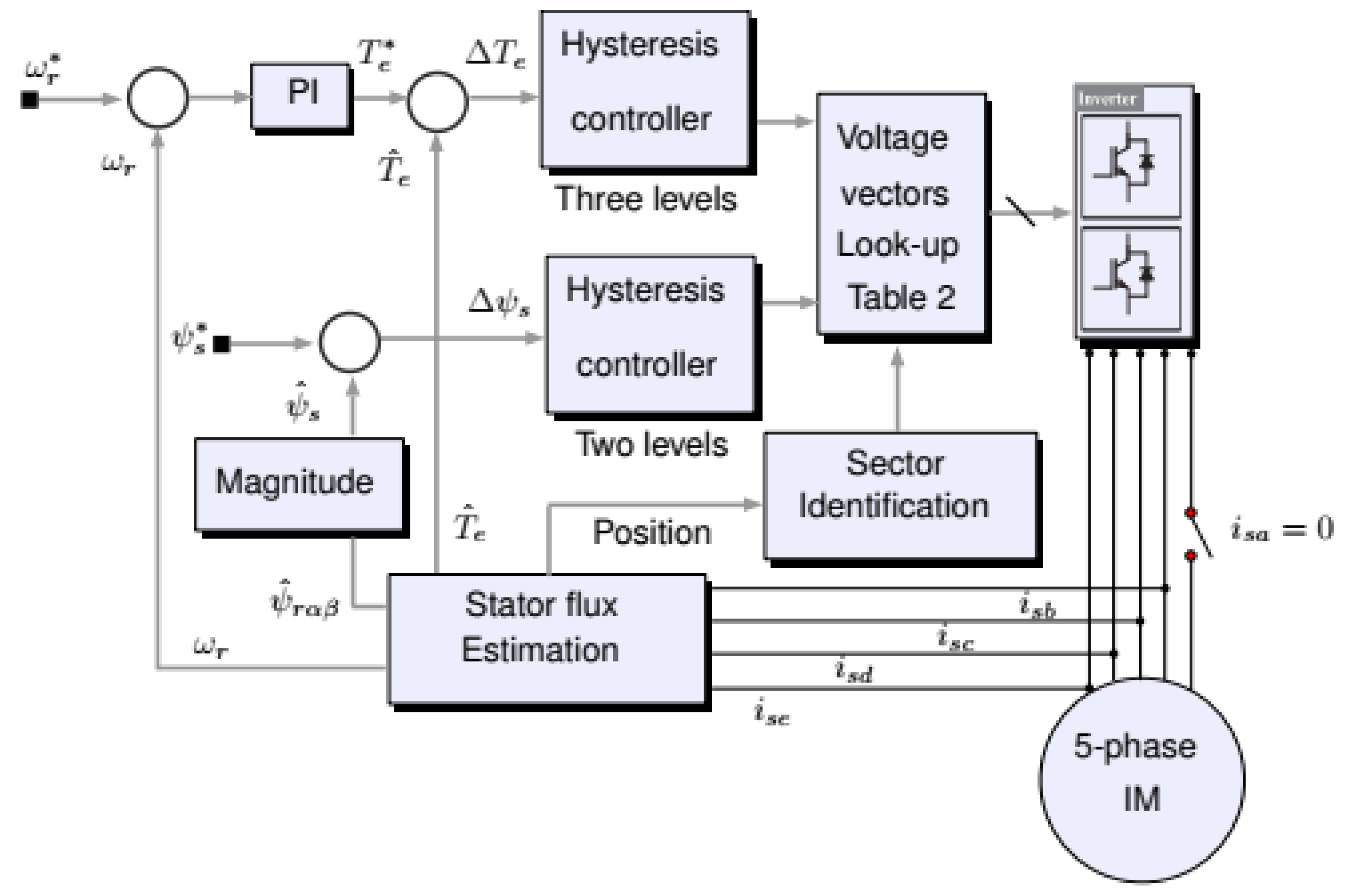
3.3. Post Fault Direct Torque Control
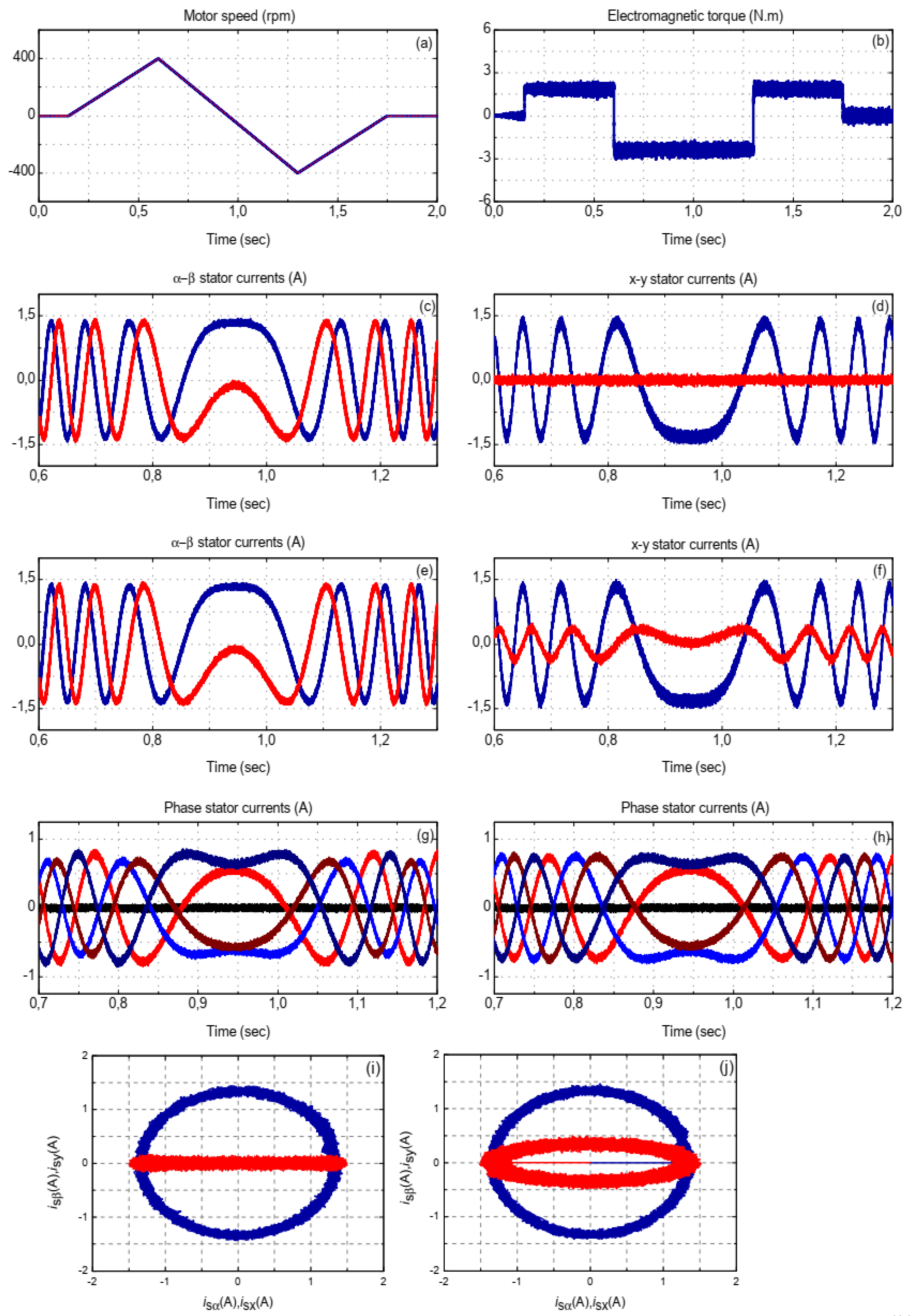
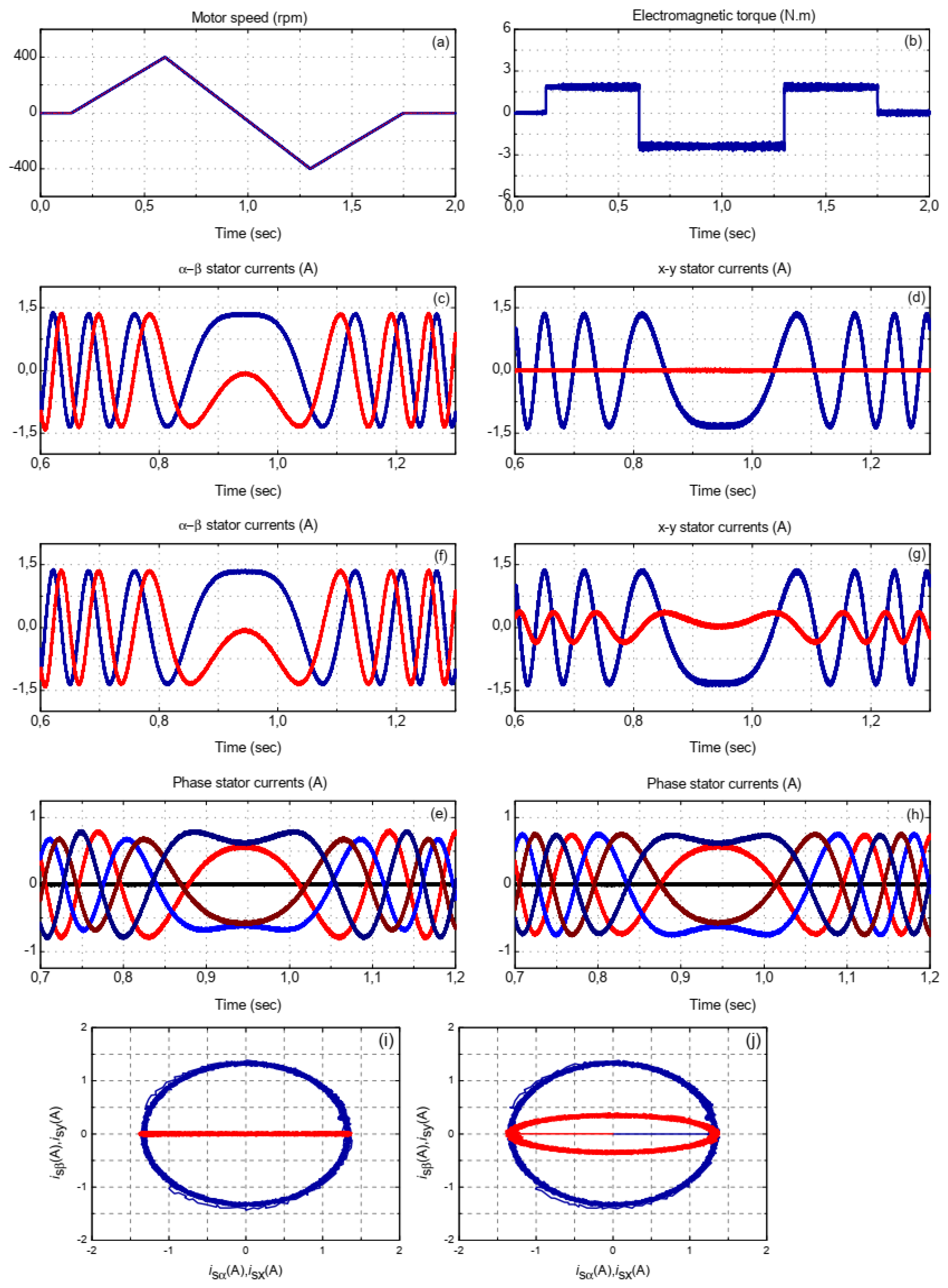
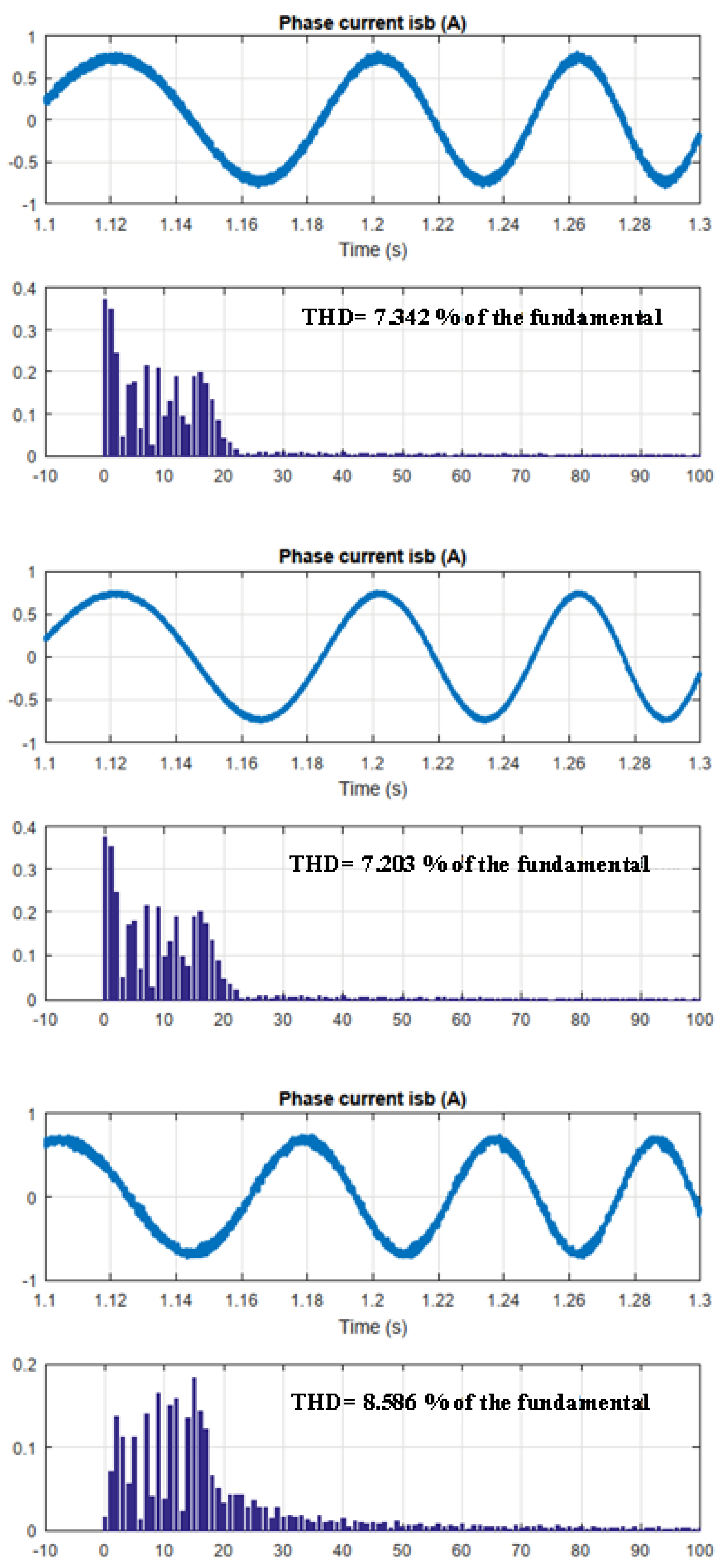
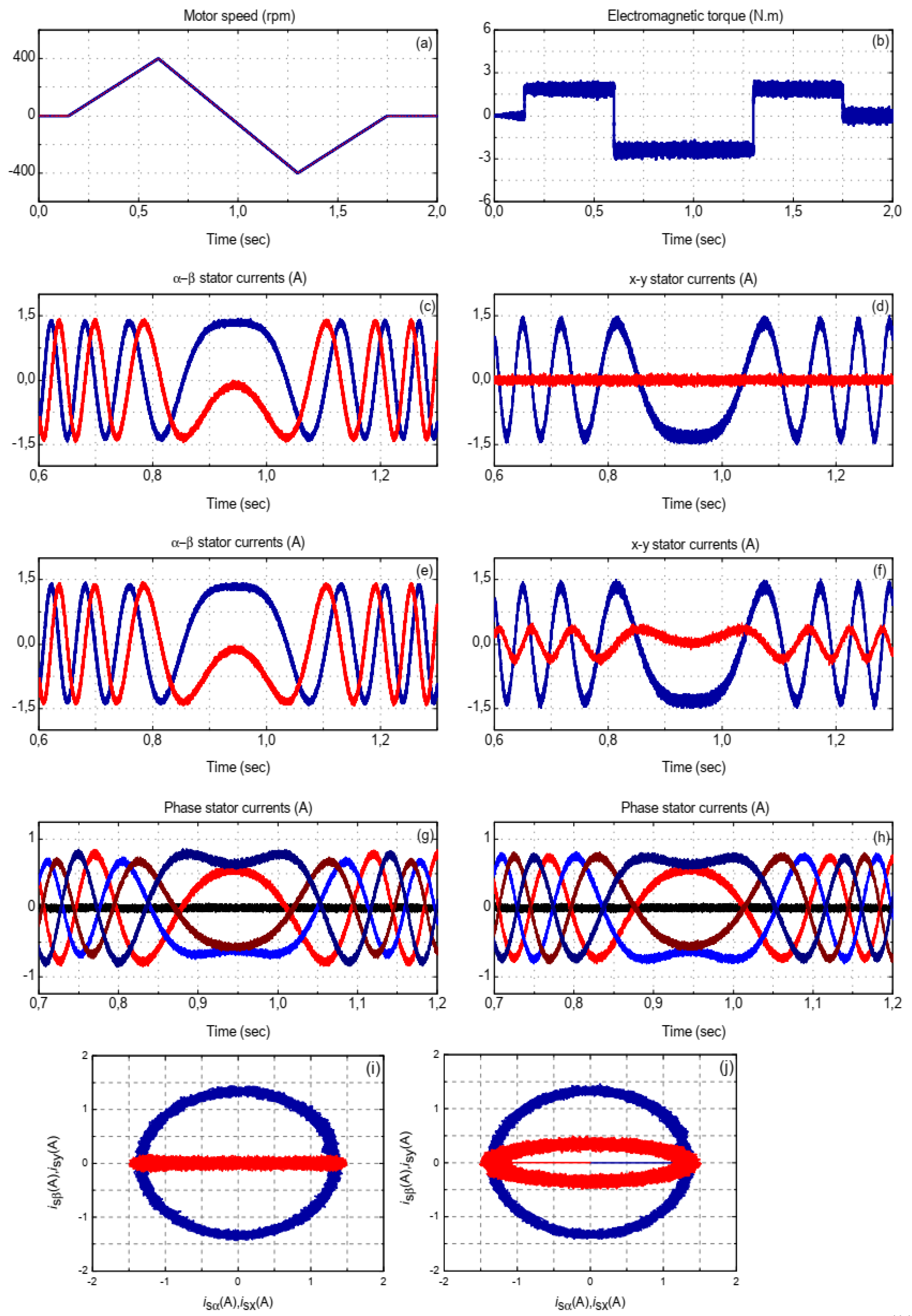
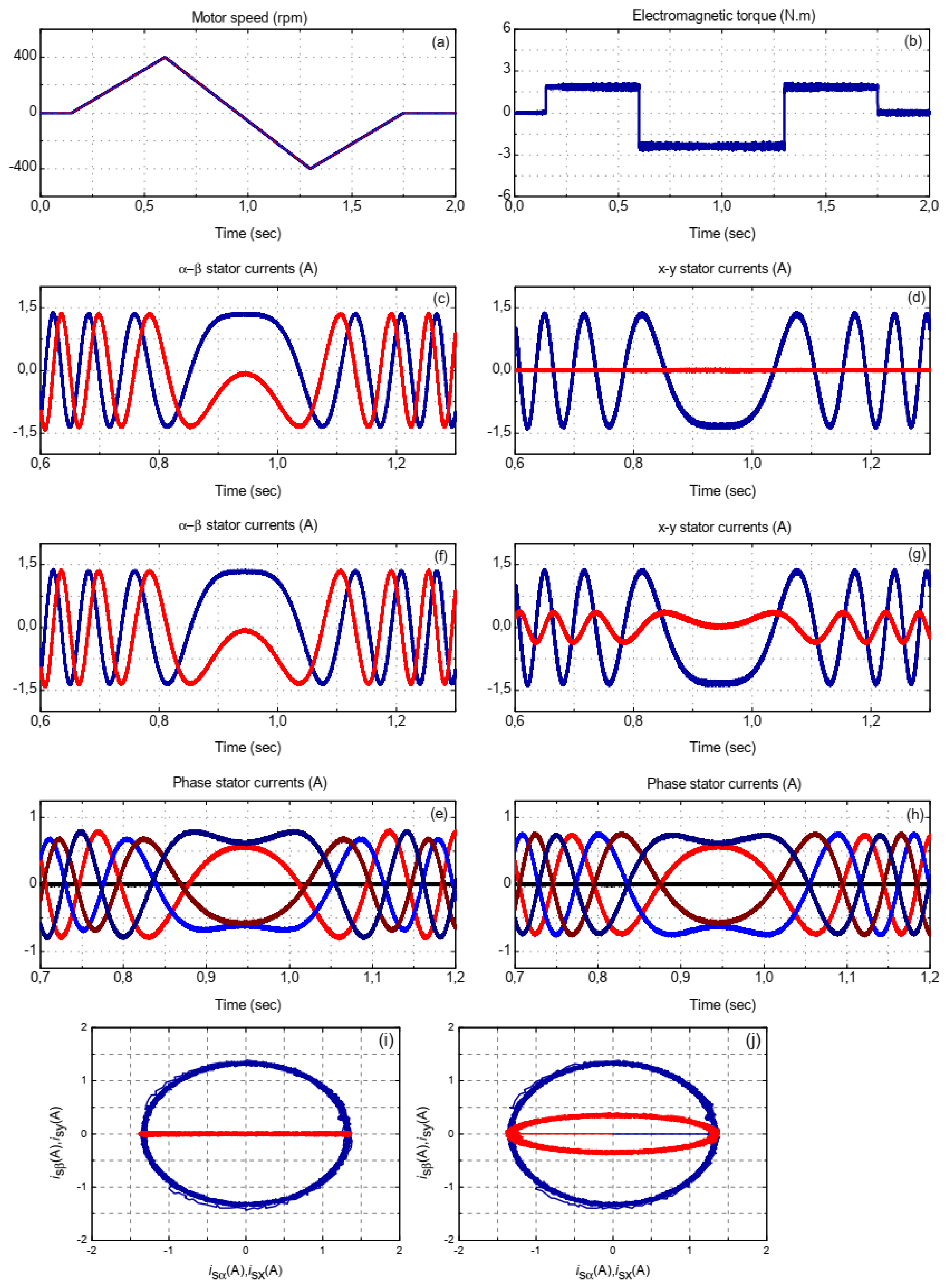
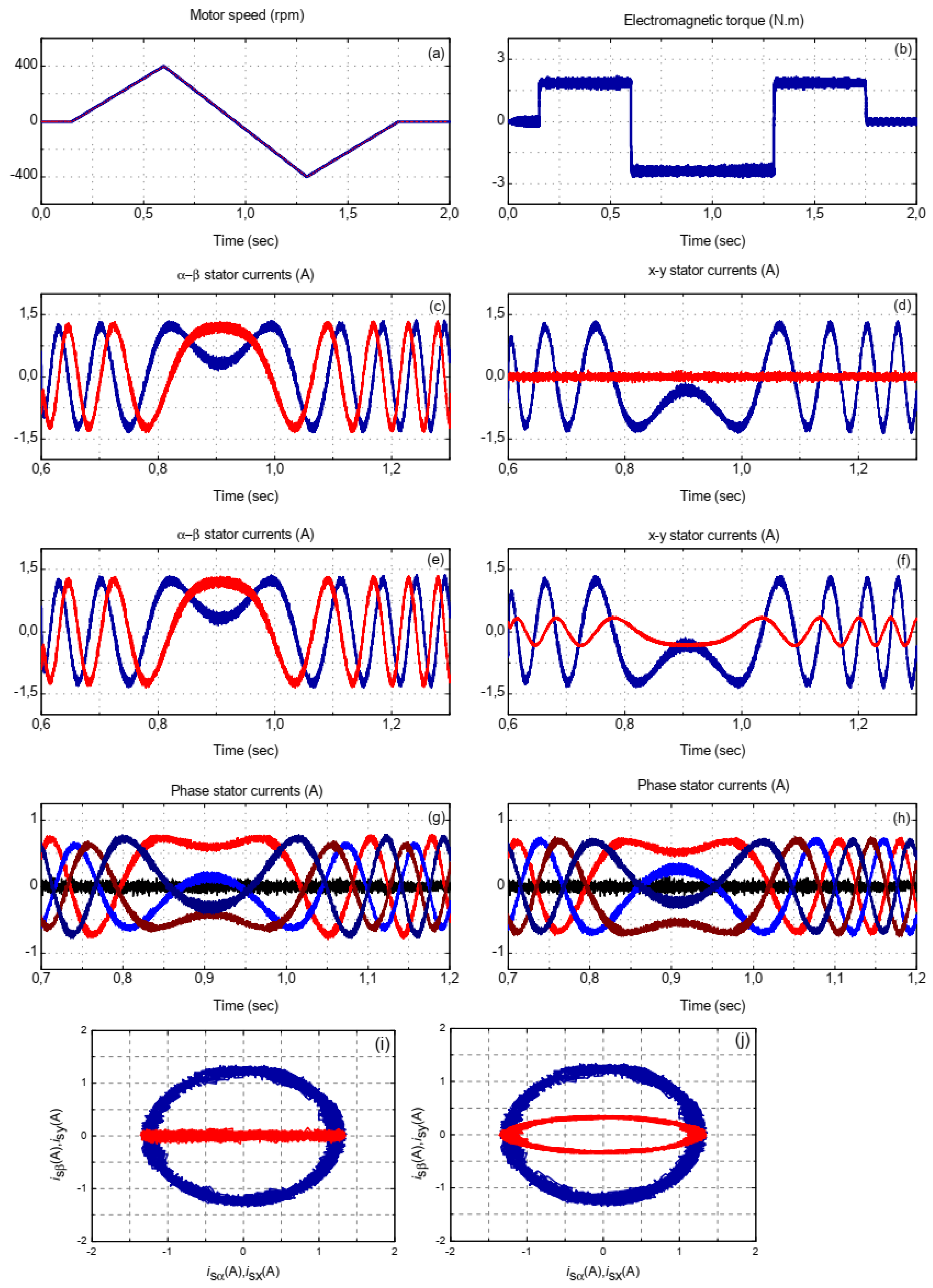
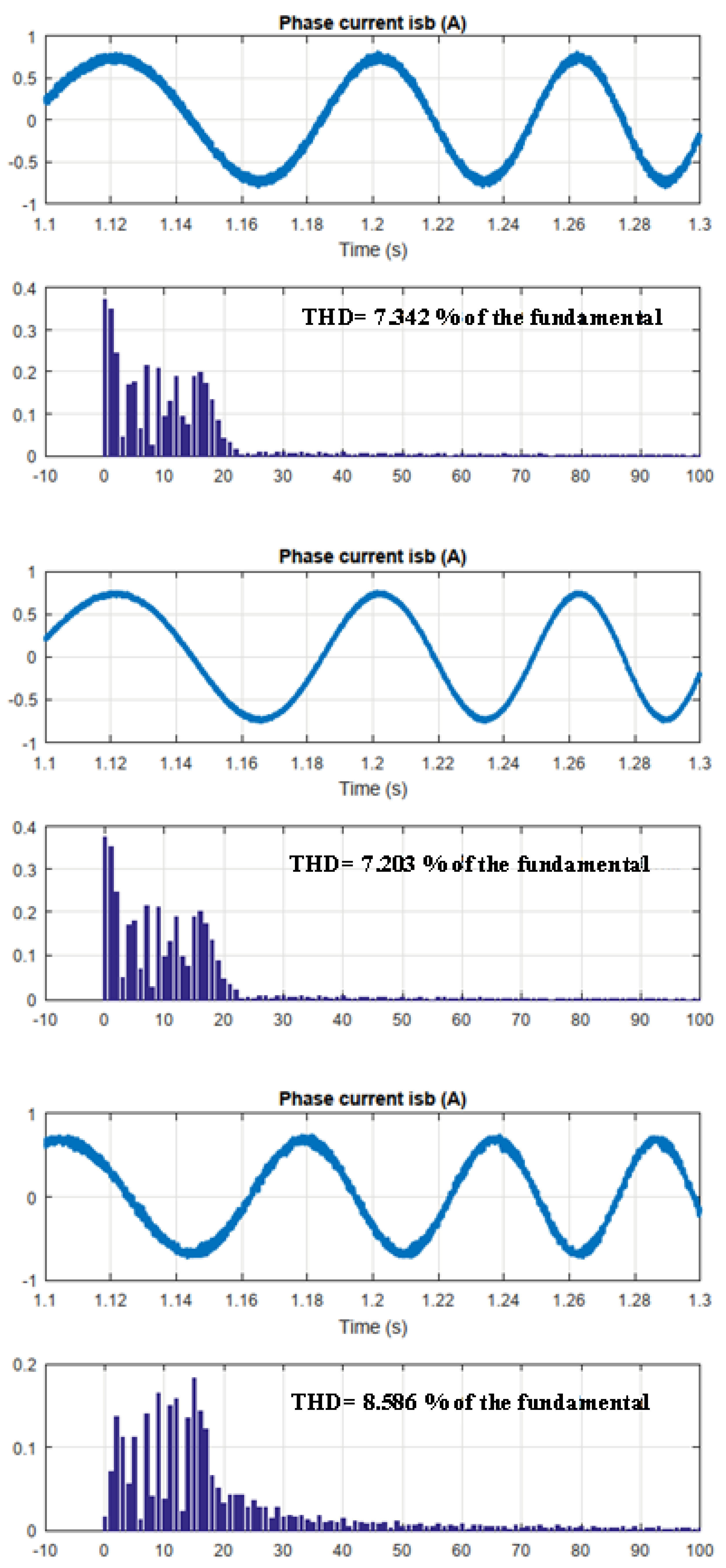
4. Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | P | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Value | 10 | 6.3 | 0.46 | 0.46 | 0.04 | 0.04 | 0.42 | 2 | 8.33 | 2.1 | 1.2705 | 0.01 |
| PI Gains | PR Gains | DTC | Hysteresis Controller | |||
|---|---|---|---|---|---|---|
| Flux Comparator Limits | Torque Comparator Limits | Hysteresis Limits | ||||
| 7.5398 | 2842.4 | 2000 | 0.1 | 0.007 and −0.007 | 0.005 and −0.005 | 2 * |
References
- Hang, C.; Emil, L.; Martin, J.; Mario, D.; Wooi, H.; Nasrudin, A. Operation of a six-phase induction machine using series-connected machine-side converters. IEEE Trans. Ind. Electron. 2014, 61, 164–176. [Google Scholar]
- Jen, F.; Tomas, L. Disturbance-free operation of a multiphase current-regulated motor drive with an opened phase. IEEE Trans. Ind. Appl. 1994, 30, 1267–1274. [Google Scholar] [CrossRef]
- Jose, R.; Federico, B.; Emil, L.; Mario, D.; Sergio, T.; Martin, J. Variable-speed five-phase induction motor drive based on predictive torque control. IEEE Trans. Ind. Electron. 2013, 60, 2957–2968. [Google Scholar]
- Xiaoyan, H.; Andrew, G.; Chris, G.; Youtong, F.; Qinfen, L. Design of a five-phase brushless dc motor for a safety critical aerospace application. IEEE Trans. Ind. Electron. 2012, 59, 3532–3541. [Google Scholar] [CrossRef]
- Luigi, A.; Nicola, B. Experimental tests of dual three-phase induction motor under faulty operating condition. IEEE Trans. Ind. Electron. 2012, 59, 2041–2048. [Google Scholar]
- Yifan, Z.; Tomas, L. Modeling and control of a multi-phase induction machine with structural unbalance. IEEE Trans. Energy Convers. 1996, 11, 578–584. [Google Scholar]
- Hyung, R.; Ji, K.; Seung, S. Synchronous-frame current control of multiphase synchronous motor under asymmetric fault condition due to open phases. IEEE Trans. Ind. Appl. 2006, 42, 1062–1070. [Google Scholar] [CrossRef]
- Hang, C.; Mario, D.; Emil, L.; Martin, J.; Wooi, H.; Nasrudin, A. Postfault operation of an asymmetrical six-phase induction machine with single and two isolated neutral points. IEEE Trans. Power Electron. 2014, 29, 5406–5416. [Google Scholar]
- Angelo, T.; Michele, M.; Luca, Z.; Giovanni, S.; Domenico, C. Control of multiphase induction motors with an odd number of phases under open-circuit phase faults. IEEE Trans. Power Electron. 2012, 27, 565–577. [Google Scholar]
- Fabrice, L. Design and Modeling of a 7-Phase Axial Flux Permanent Magnet Synchronous Machine: Vector Control in Normal and Fault Mode Operations. Ph.D. Thesis, Universit’e des Sciences et Technologie de Lille, Lille, France, December 2006. [Google Scholar]
- Suman, D.; Leila, P. An optimal control technique for multiphase PM machines under open-circuit faults. IEEE Trans. Ind. Electron. 2008, 55, 1988–1995. [Google Scholar]
- Hamid, T.; Ruhe, S.; Huangsheng, X. A dsp-based vector control of five-phase synchronous reluctance motor. In Proceedings of the 2000 IEEE Industry Applications Conference, Thirty-Fifth IAS Annual Meeting and World Conference on Industrial Applications of Electrical Energy (Cat. No.00CH37129), Rome, Italy, 8–12 October 2000; Volume 3, pp. 1759–1765. [Google Scholar]
- Domenico, C.; Giovanni, S.; Angelo, T.; Luca, Z. General inverter modulation strategy for multi-phase motor drives. In Proceedings of the IEEE International Symposium on Industrial Electronics, Vigo, Spain, 4–7 June 2007; pp. 1131–1137. [Google Scholar]
- Leila, P.; Hamid, T. Fault-tolerant interior-permanent-magnet machines for hybrid electric vehicle applications. IEEE Trans. Veh. Technol. 2007, 56, 1546–1552. [Google Scholar]
- Liu, Z.; Houari, A.; Machmoum, M.; Benkhoris, M.F.; Tang, T. An active FTC strategy using generalized proportional integral observers applied to five-phase PMSG based tidal current energy conversion systems. Energies 2020, 13, 6645. [Google Scholar] [CrossRef]
- Bing, T.; Galina, M.; Qun, A.; Li, S.; Dmitry, S. Fault-tolerant control of a five-phase permanent magnet synchronous motor for industry applications. IEEE Trans. Ind. Appl. 2018, 54, 3943–3952. [Google Scholar]
- Jinquan, X.; Boyi, Z.; Hao, F.; Hong, G. Guaranteeing the fault transient performance of aerospace multiphase permanent magnet motor system: An adaptive robust speed control approach. CES Trans. Electr. Mach. Syst. 2020, 4, 114–122. [Google Scholar]
- Khadar, S.; Kouzou, A.; Thiziri, A. Advanced fault-tolerant control of multiphase induction motor drives in EV. In Proceedings of the 1st International Conference on Sustainable Renewable Energy Systems and Applications (ICSRESA), Tebessa, Algeria, 4–5 December 2019; pp. 1–5. [Google Scholar]
- Anissa, H.; Ramzi, T.; Med, M.; Atif, I. Fault tolerant vector controlled five-phase permanent magnet synchronous motor drive with an open phase. In Proceedings of the 15th International Multi-Conference on Systems, Signals & Devices (SSD), Yasmine Hammamet, Tunisia, 19–22 March 2018. [Google Scholar]
- Zhong, P.; Zedong, Z.; Yongdong, L.; Zicheng, L. Fault-tolerant control of multiphase induction machine drives based on virtual winding method. In Proceedings of the IEEE Transportation Electrification Conference and Expo (ITEC), Chicago, IL, USA, 22–24 June 2017; pp. 252–256. [Google Scholar]
- Bheemaiah, C.; Utkal, M.; Rangan, B. Fault-tolerant DTC technique for five-phase three-level NPC inverter-fed induction motor drive with an open-phase fault. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 5281–5287. [Google Scholar]
- Ignacio, P.; Mario, D.; Paula, E.; Mario, B. Field-oriented control of multiphase drives with passive fault tolerance. IEEE Trans. Ind. Electron. 2020, 67, 7228–7238. [Google Scholar]
- Gonzalez-Prieto, A.; Aciego, J.J.; Gonzalez-Prieto, I.; Duran, M.J. Automatic fault-tolerant control of multiphase induction machines: A game changer. Electronics 2020, 9, 938. [Google Scholar] [CrossRef]
- Jiawei, S.; Zicheng, L.; Zedong, Z.; Yongdong, L. An online global fault-tolerant control strategy for symmetrical multiphase machines with minimum losses in full torque production range. IEEE Trans. Power Electron. 2020, 35, 2819–2830. [Google Scholar]
- Mahmoud, M.; Hamdi, E. A novel fault tolerant control approach based on backstepping controller for a five phase induction motor drive: Experimental investigation. ISA Trans. 2020, (in press). [Google Scholar] [CrossRef]
- Jiang, J.; Yu, X. Fault-tolerant control systems: A comparative study between active and passive approaches. Annu. Rev. Control 2012, 36, 60–72. [Google Scholar] [CrossRef]
- Mohamed, F.; Franck, B.; Gerard, C.; Farhat, F. Fuzzy logic and sliding-mode controls applied to six-phase induction machine with open phases. IEEE Trans. Ind. Electron. 2010, 57, 354–364. [Google Scholar]
- Reza, K.; Babak, M.; Lotfi, B.; Franck, B.; Gerard, C. Modeling and control of six-phase symmetrical induction machine under fault condition due to open phases. IEEE Trans. Ind. Electron. 2008, 55, 1966–1977. [Google Scholar]
- Mario, D.; Federico, B. Recent advances in the design, modeling, and control of multiphase machines: Part II. IEEE Trans. Ind. Electron. 2016, 63, 459–468. [Google Scholar]
- Xavier, K.; Eric, S. A vectorial approach for generation of optimal current references for multiphase permanent-magnet synchronous machines in real time. IEEE Trans. Ind. Electron. 2011, 58, 5057–5065. [Google Scholar]
- Jiabin, W.; Kais, A.; Davide, H. Optimal torque control of fault-tolerant permanent magnet brushless machines. IEEE Trans. on Magn. 2003, 39, 2962–2964. [Google Scholar] [CrossRef]
- Eric, S.; Alain, B.; Jean, H. Vectorial formalism for analysis and design of polyphase. Eur. Phys. J. Appl. Phys. 2003, 22, 207–220. [Google Scholar]
- Hyung, R.; Ji, K.; Seung, S. Synchronous frame current control of multi-phase synchronous motor. part i. modeling and current control based on multiple d-q spaces concept under balanced condition. In Proceedings of the Conference Record of the 2004 IEEE Industry Applications Conference, 39th IAS Annual Meeting, Seattle, WA, USA, 3–7 October 2004; Volume 1, p. 63. [Google Scholar]
- Jose, R.; Marian, K.; Jose, R.; Pericle, Z.; Haitham, A.; Hector, Y.; Christian, R. State of the art of finite control set model predictive control in power electronics. IEEE Trans. Ind. Inform. 2013, 9, 1003–1016. [Google Scholar]
- Petros, K.; Tobias, G.; Nikolaos, K.; Frederick, K.; Stefanos, M. Direct model predictive control: A review of strategies that achieve long prediction intervals for power electronics. IEEE Ind. Electron. Mag. 2014, 8, 32–43. [Google Scholar]
- Mario, D.; Federico, B.; Joel, P.; Sergio, T. Predictive current control of dual three-phase drives using restrained search techniques and multi level voltage source inverters. In Proceedings of the IEEE International Symposium on Industrial Electronics, Bari, Italy, 4–7 July 2010; pp. 3171–3176. [Google Scholar]
- Joel, P.; Federico, B.; Chee, L.; Emil, L. Predictive current control with modulation in asymmetrical six-phase motor drives. In Proceedings of the 15th International Power Electronics and Motion Control Conference (EPE/PEMC), Novi Sad, Serbia, 4–6 September 2012; pp. 1–8. [Google Scholar]
- Haitham, R.; Atif, I.; Jaroslaw, G. High Performance Control of AC Drives with MATLAB/Simulink Models; Wiley Online Library: Hoboken, NJ, USA, 2012. [Google Scholar]
- Klingshirn, E.A. High phase order induction motors—Part I. description and theoretical considerations. IEEE Power Eng. Rev. 1983, 3, 27. [Google Scholar]
- Saim, A.; Mellah, R.; Houari, A.; Machmoum, M.; Djerioui, A. Adaptive resonant based multi-loop control strategy for parallel distributed generation units in standalone microgrid application. Electr. Power Syst. Res. 2017, 143, 262–271. [Google Scholar] [CrossRef]
- Hugo, G.; Mario, D.; Federico, B.; Blas, B.; Sergio, T. Speed control of five-phase induction motors with integrated open-phase fault operation using model-based predictive current control techniques. IEEE Trans. Ind. Electron. 2014, 61, 4474–4484. [Google Scholar]
- Ziegler, J.G.; Nichols, N.B. Optimum settings for automatic controllers. Trans. ASME 1942, 64, 759–768. [Google Scholar] [CrossRef]
- Hamdi, E.; Ramzi, T.; Atif, I.; Mohamed, M. Adaptive direct torque control using luenberger-sliding mode observer for online stator resistance estimation for five-phase induction motor drives. Electr. Eng. 2018, 100, 1639–1649. [Google Scholar]




| Characteristics of Five-Phase IMdrive System | Pre-Fault Operation | Post-Fault Operation |
|---|---|---|
| Possible switching states | 25 = 32 | 24 = 16 |
| Leg-to-phase voltages | Equations (3) and (4) | Equations (6), (7) and (13) |
| Clarke transformation | Matrix [T5] | Matrix [T4] |
| Motor model | Equations (8) and (9) | Equations (14) and (9) |
| Dwell Time | Virtual Vectors | |||||||
|---|---|---|---|---|---|---|---|---|
| 1 | 0.382 | 0.191 | 0.382 | 1 | 0.382 | 0.191 | 0.382 | |
| - | 0.618 | 0.809 | 0.618 | - | 0.618 | 0.809 | 0.618 | |
| Stator Flux Sector | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | ||
| +1 | +1 | ||||||||
| −1 | |||||||||
| 0 | |||||||||
| −1 | +1 | ||||||||
| −1 | |||||||||
| 0 | |||||||||
| Method | Speed (rpm) | Current Ripple (A) | Torque Ripple (Nm) |
|---|---|---|---|
| Hysteresis controller | 100 400 | 0.12 0.1 | 0.9 0.7 |
| PR controller | 100 400 | 0.08 0.05 | 0.7 0.4 |
| DTC controller | 100 400 | 0.24 0.14 | 1.2 0.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
A. Mossa, M.; Echeikh, H.; Diab, A.A.Z.; Haes Alhelou, H.; Siano, P. Comparative Study of Hysteresis Controller, Resonant Controller and Direct Torque Control of Five-Phase IM under Open-Phase Fault Operation. Energies 2021, 14, 1317. https://doi.org/10.3390/en14051317
A. Mossa M, Echeikh H, Diab AAZ, Haes Alhelou H, Siano P. Comparative Study of Hysteresis Controller, Resonant Controller and Direct Torque Control of Five-Phase IM under Open-Phase Fault Operation. Energies. 2021; 14(5):1317. https://doi.org/10.3390/en14051317
Chicago/Turabian StyleA. Mossa, Mahmoud, Hamdi Echeikh, Ahmed A. Zaki Diab, Hassan Haes Alhelou, and Pierluigi Siano. 2021. "Comparative Study of Hysteresis Controller, Resonant Controller and Direct Torque Control of Five-Phase IM under Open-Phase Fault Operation" Energies 14, no. 5: 1317. https://doi.org/10.3390/en14051317