
Analysis and Design of an Active Stabilizer for a Boost Power Converter System


 and
and
Abstract
:1. Introduction
2. System Model and Control
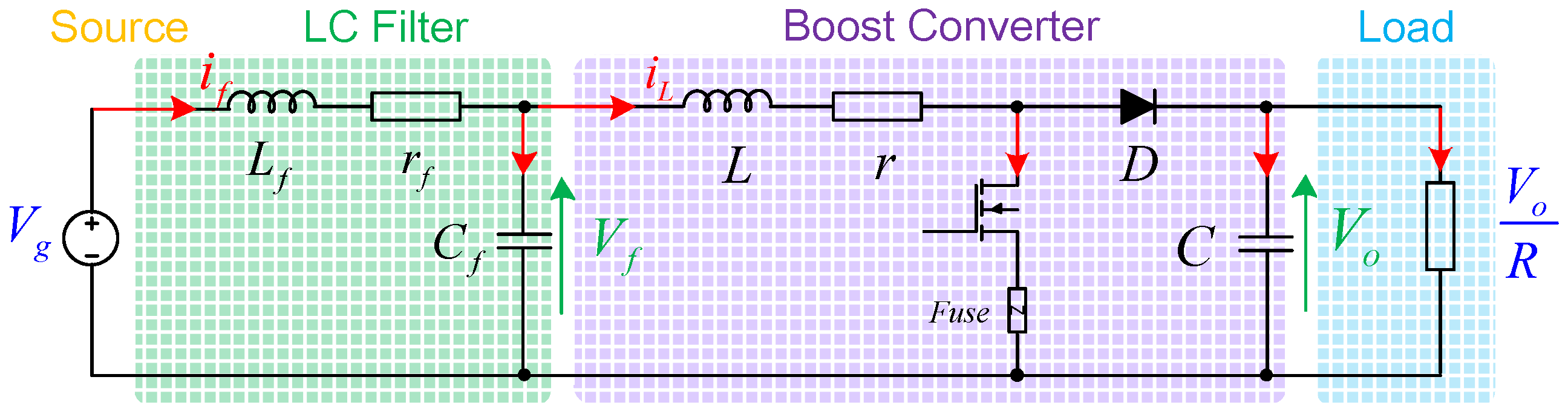
2.1. DC Power System Model
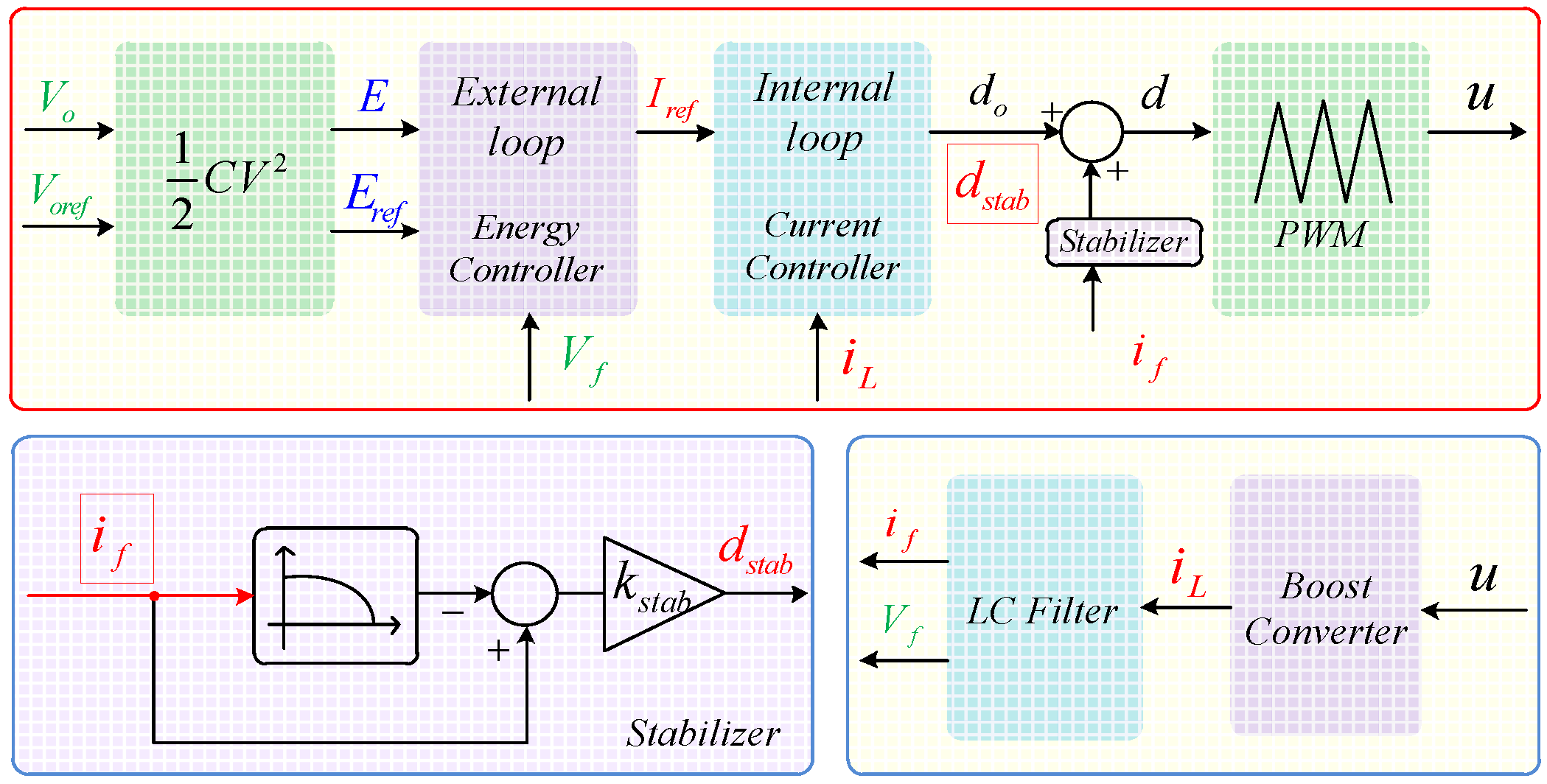
2.2. Control and Design of Stabilizer
2.3. Mathematical Modeling
3. Stability Analysis
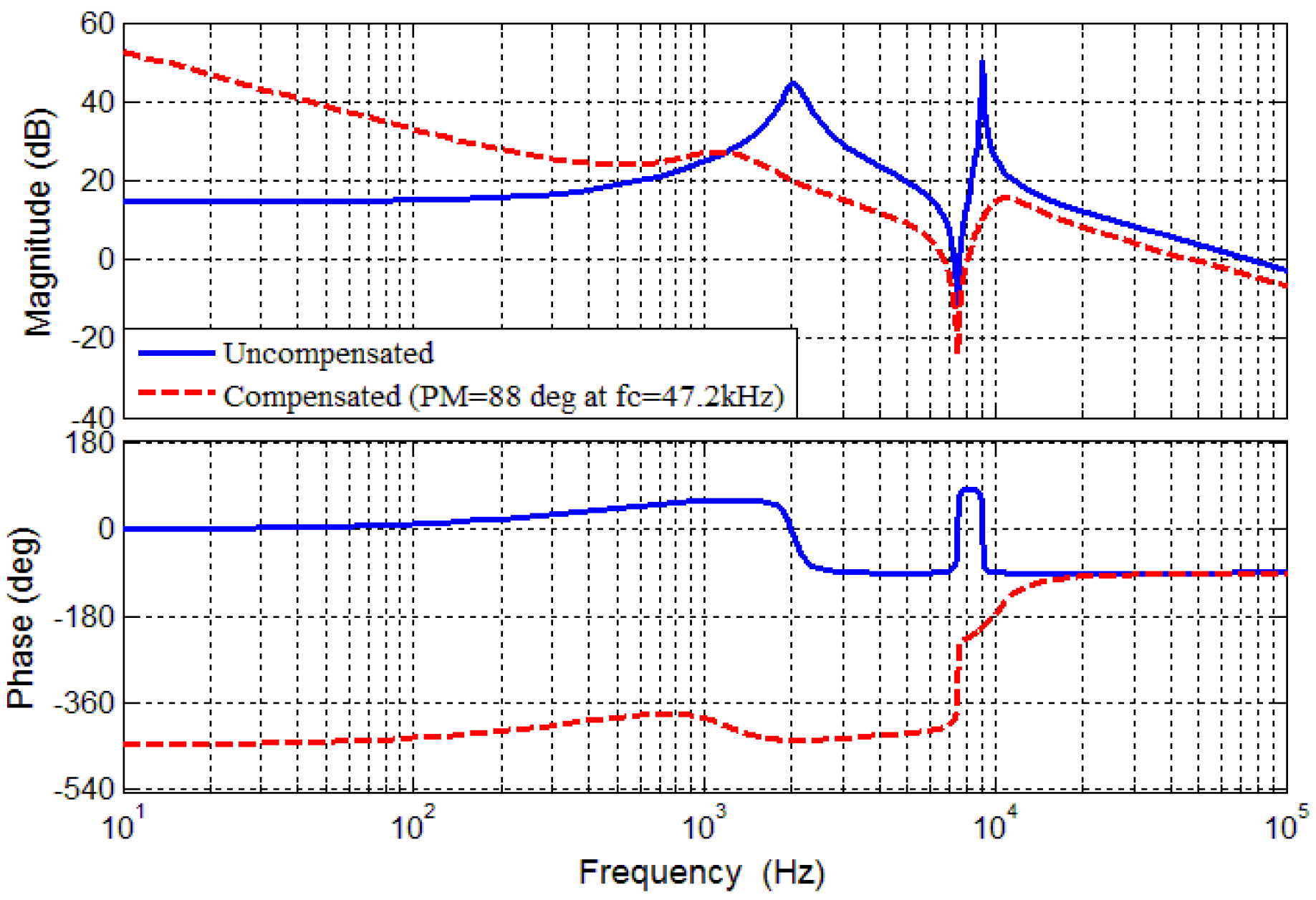
3.1. Analysis of the Loop Gain and Resonance Peak by Bode Diagram
3.2. Stability Analysis of the Whole System by the Lyapunov First Method
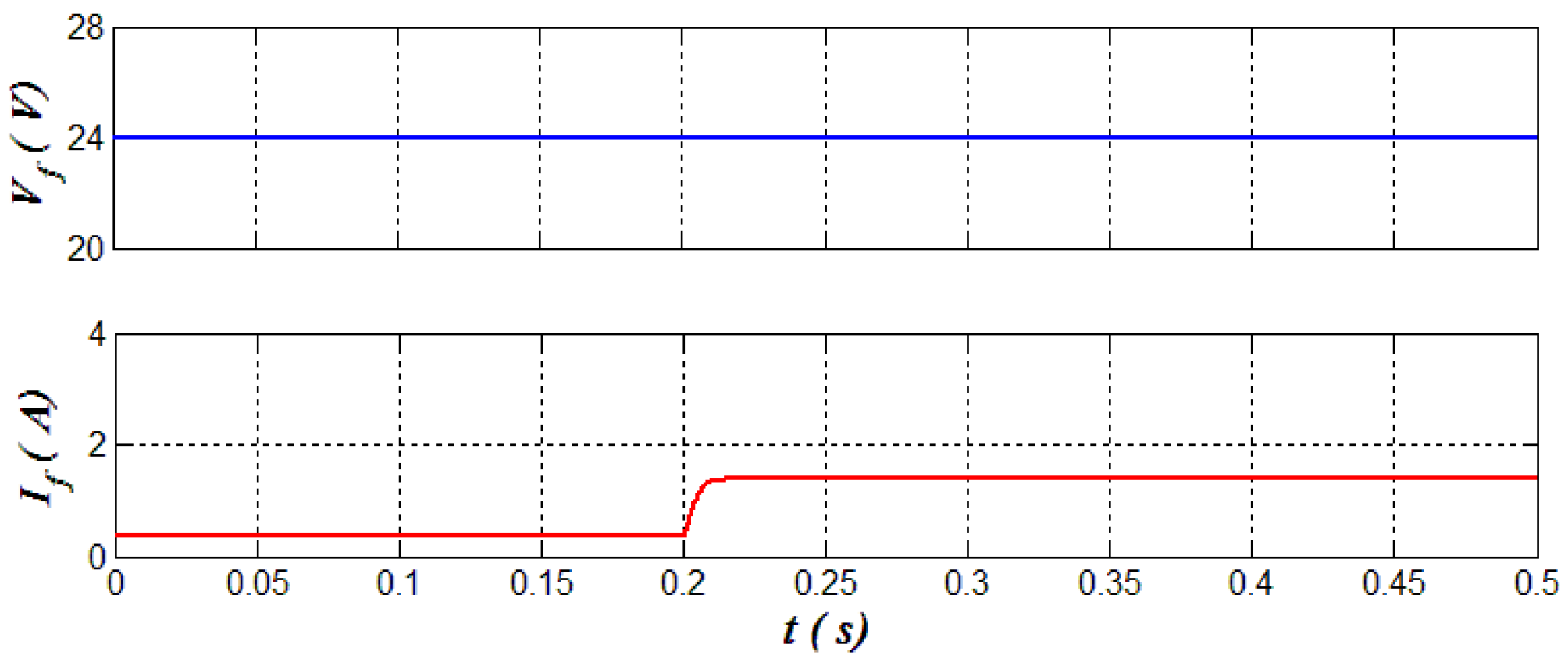
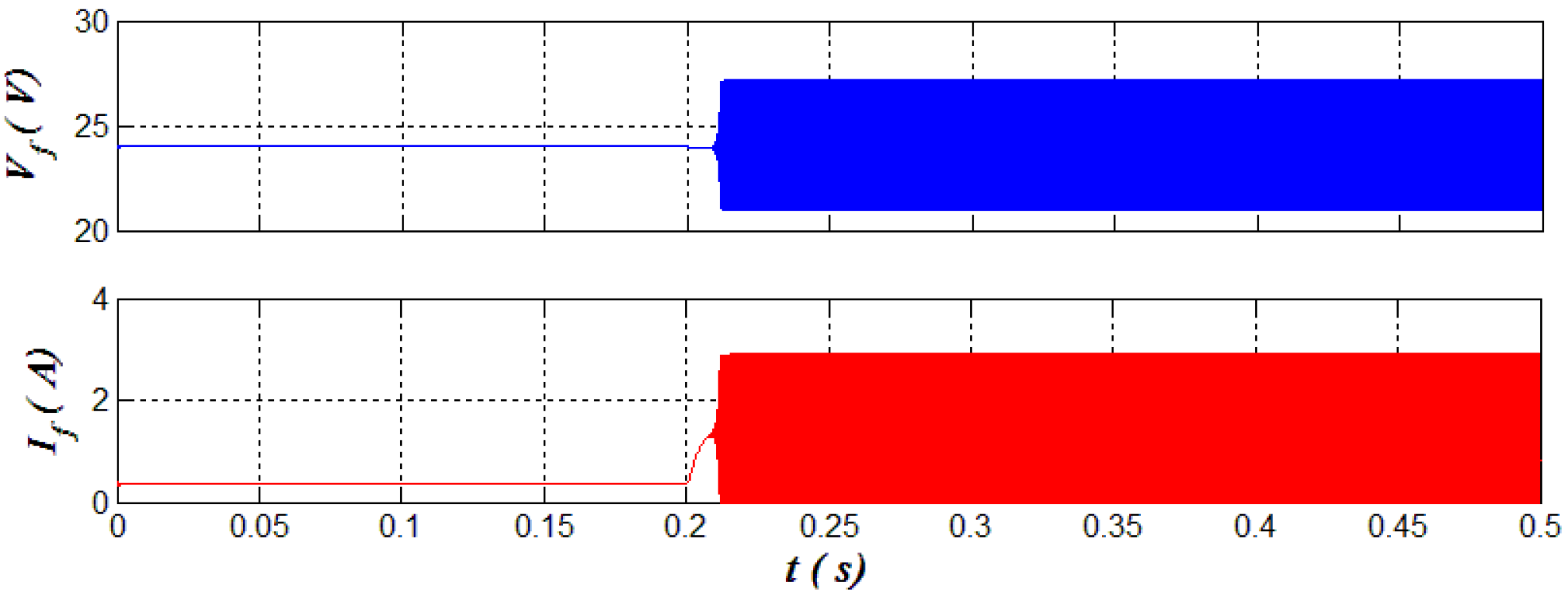
4. Simulation Results
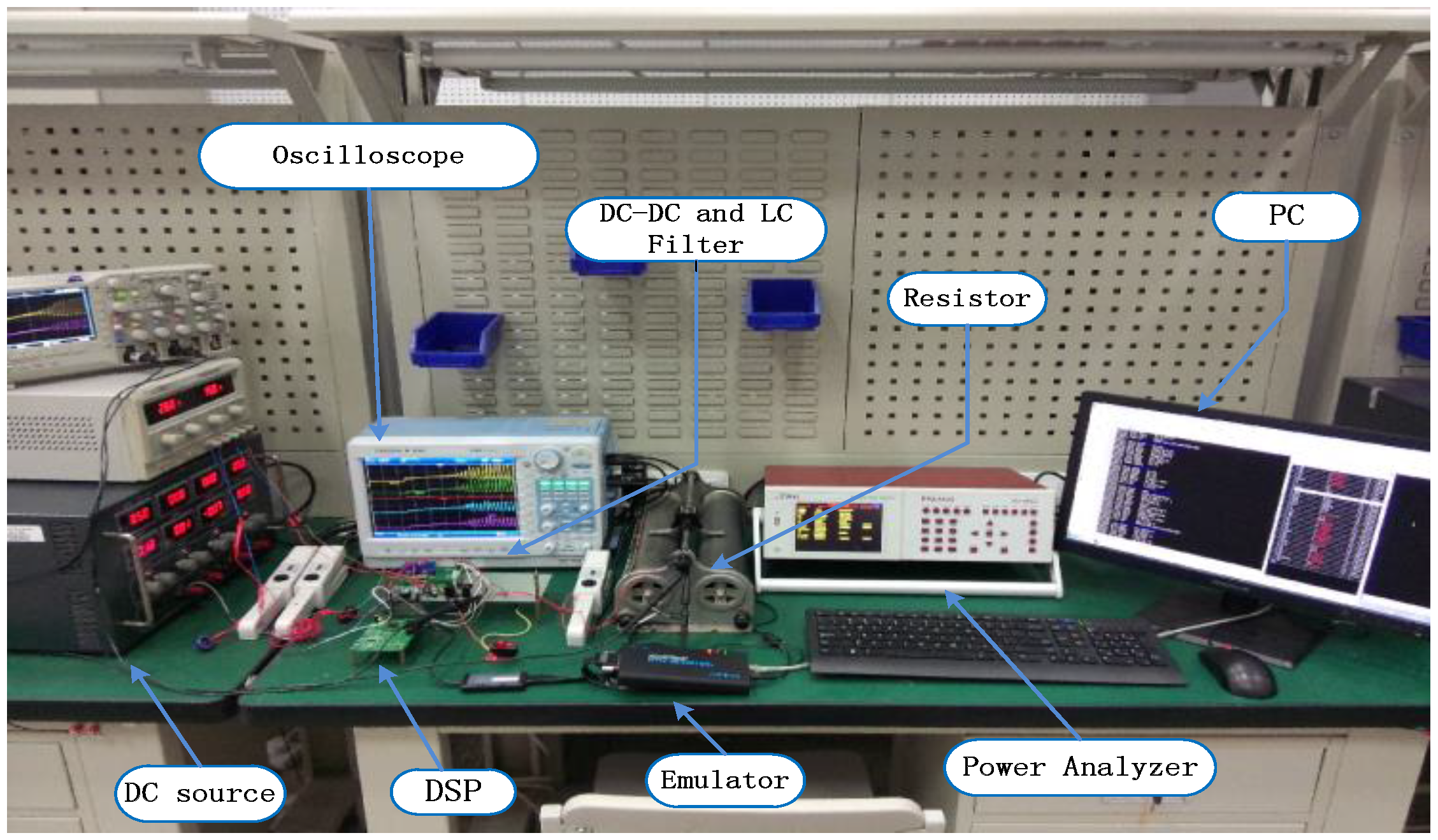
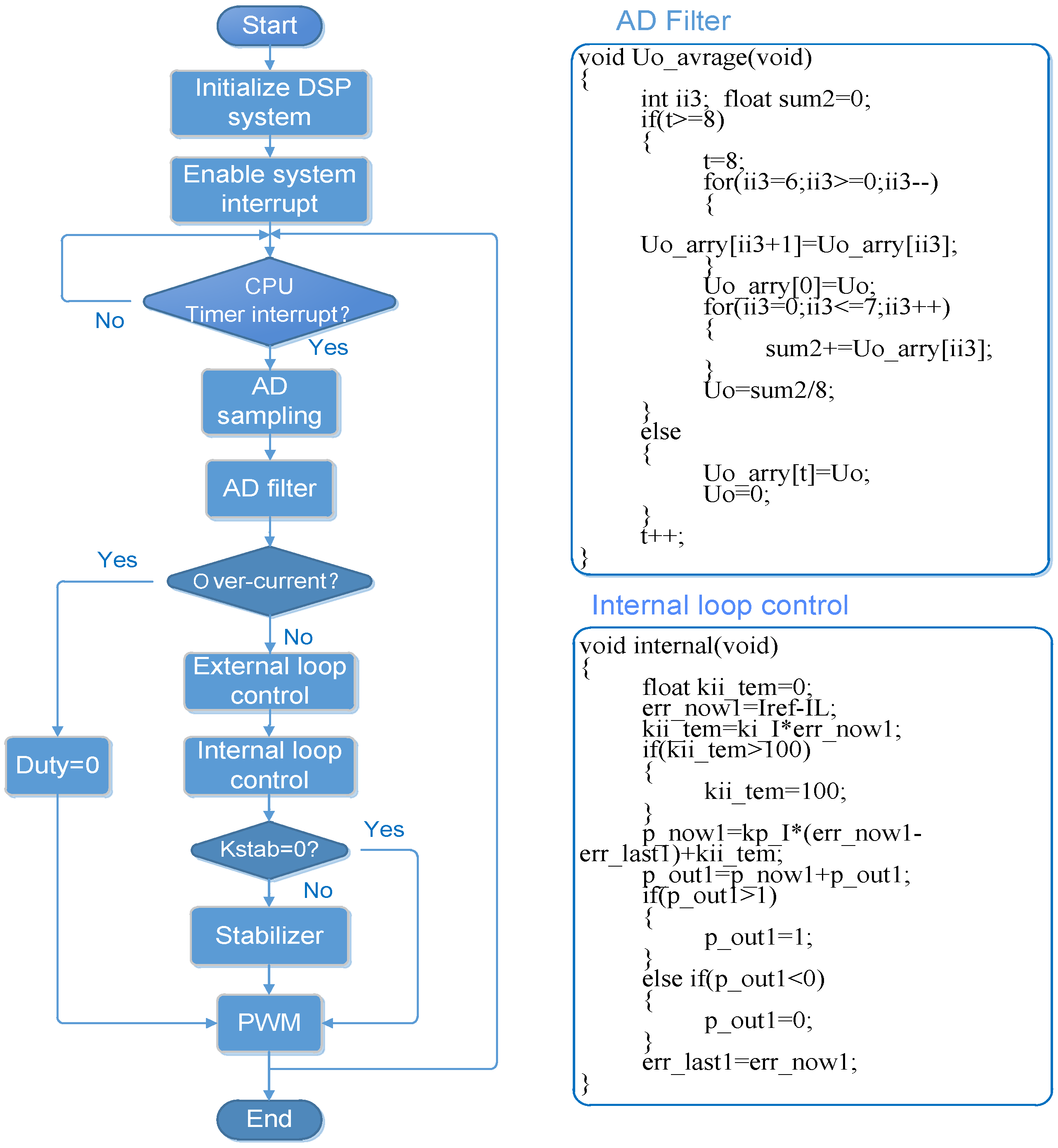
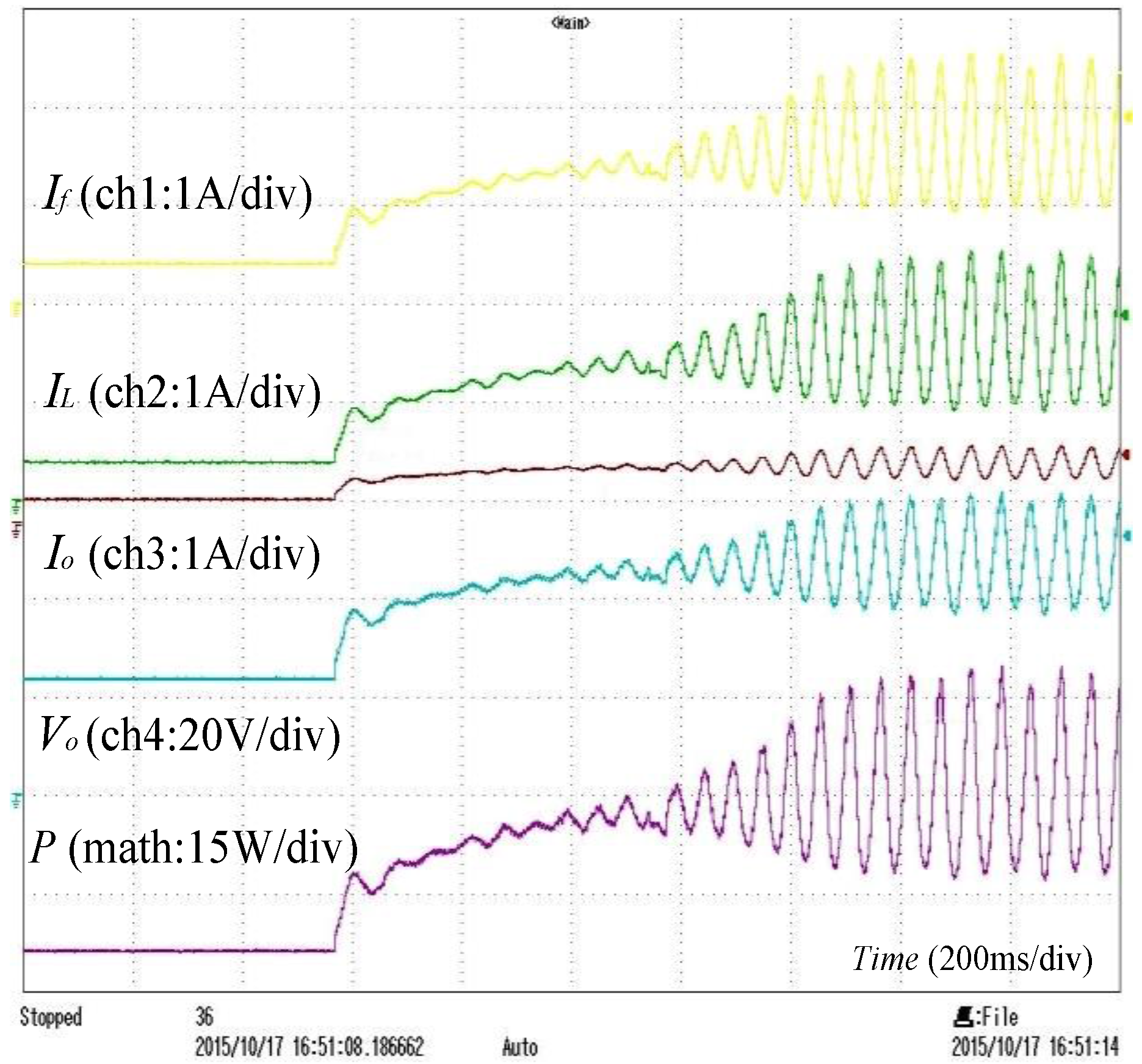
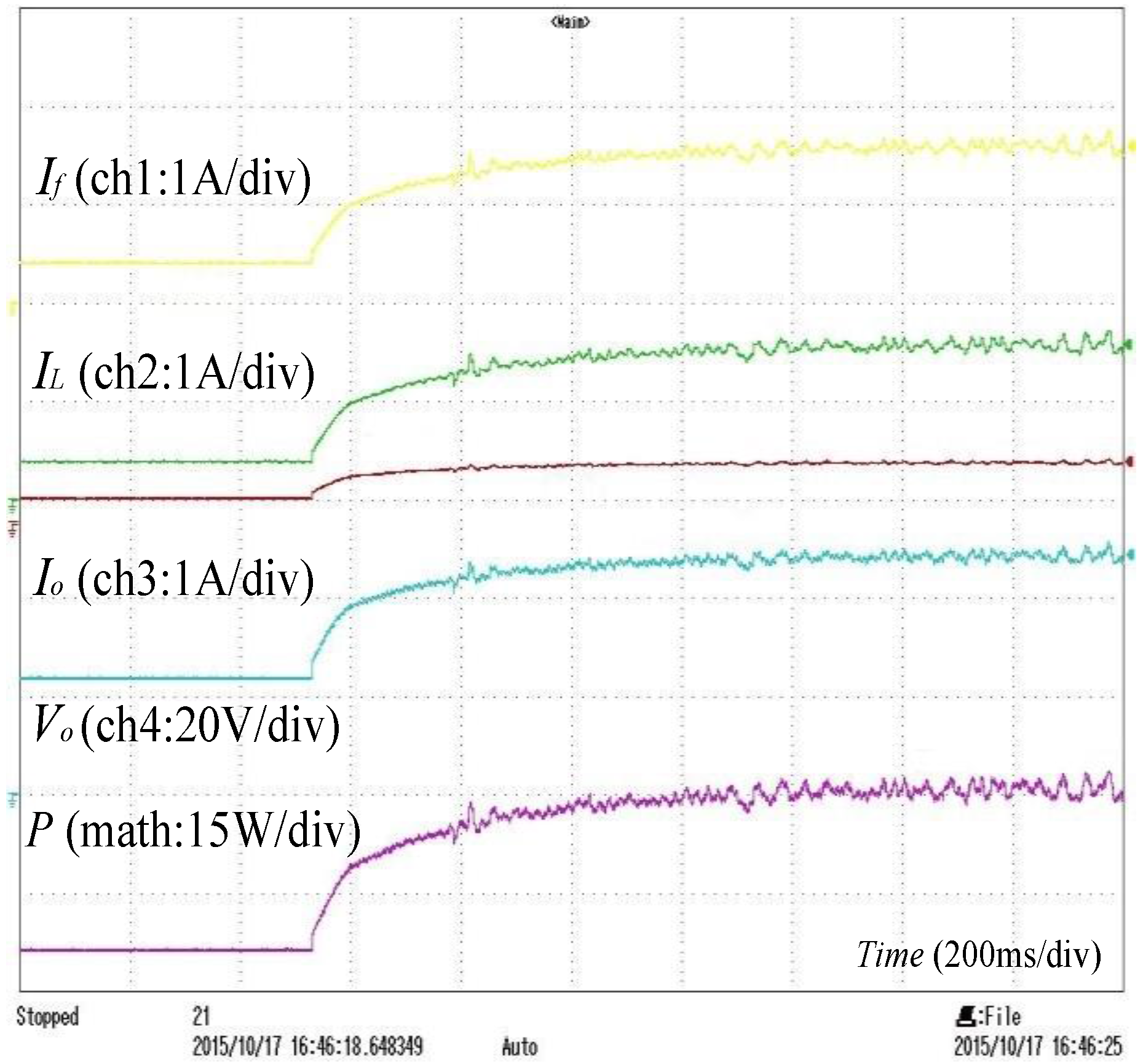
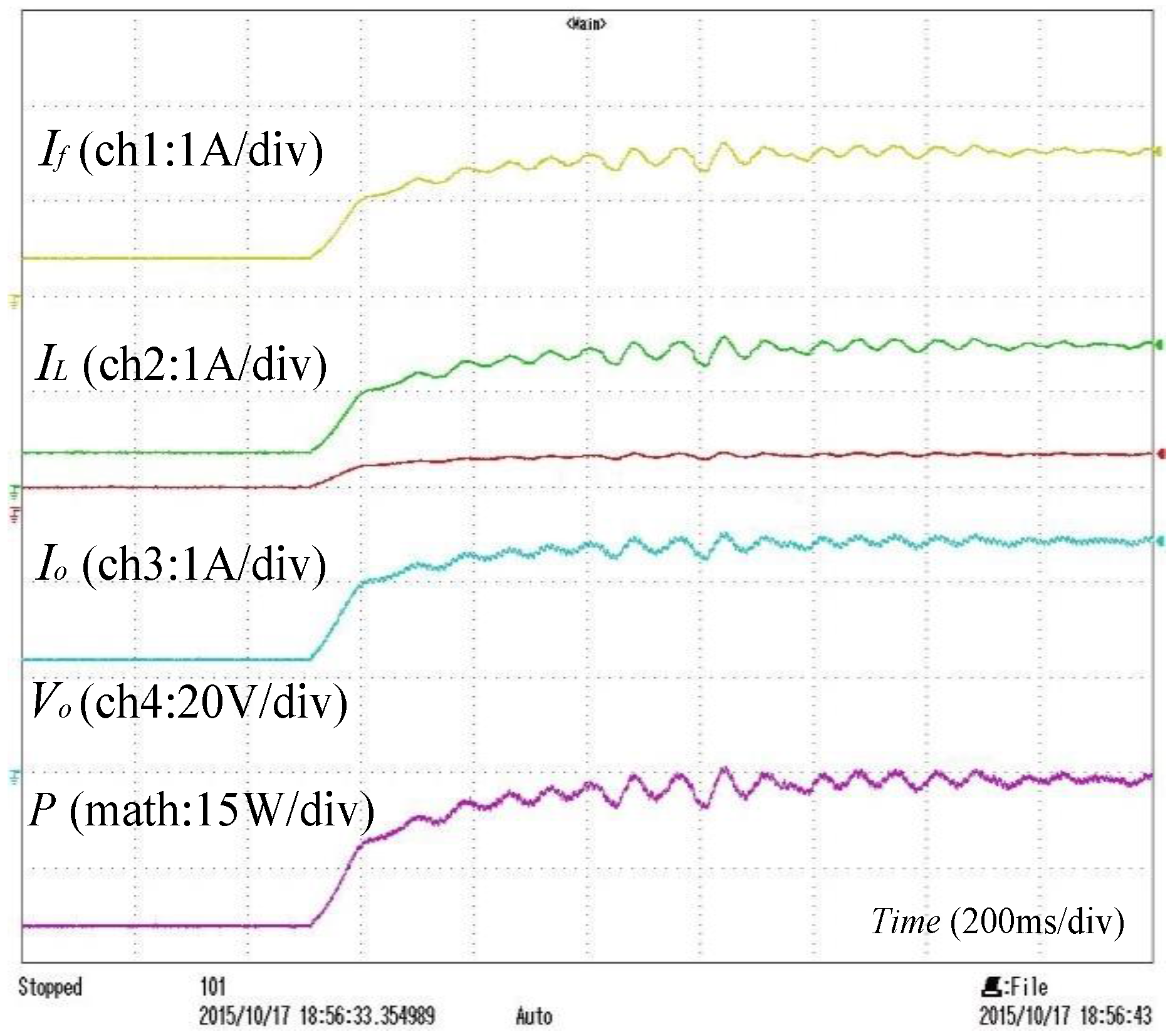
5. Experimental Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Magne, P.; Nahid-Mobarakeh, B.; Pierfederici, S. Dynamic Consideration of DC Microgrids with Constant Power Loads and Active Damping System—A Design Method for Fault-Tolerant Stabilizing System. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 562–570. [Google Scholar] [CrossRef]
- Yang, N.; Paire, D.; Gao, F.; Miraoui, A.; Liu, W. Compensation of droop control using common load condition in DC microgrids to improve voltage regulation and load sharing. Int. J. Electr. Power Energy Syst. 2015, 64, 752–760. [Google Scholar] [CrossRef]
- Zadeh, M.K.; Roghayeh, G.-G.; Pierfederici, S.; Babak, N.-M.; Molinas, M. A discrete-time tool to analyze the stability of weakly filtered active front-end PWM converters. In Proceedings of the Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 15–18 June 2014; pp. 1–7.
- Xing, L.; Feng, F.; Sun, J. Optimal damping of EMI filter input impedance. IEEE Trans. Ind. Appl. 2011, 47, 1432–1440. [Google Scholar] [CrossRef]
- Pang, S.; Huangfu, Y.; Guo, L.; Nahid-Mobarakeh, B. A Stability Method Using High-frequency Current Feed-forward Compensation for Boost Converter Systems. Proc. CSEE 2016, 20, 5616–5623. [Google Scholar]
- Saublet, L.-M.; Gavagsaz-Ghoachani, R.; Martin, J.-P. Asymptotic Stability Analysis of the Limit Cycle of a Cascaded DC–DC Converter Using Sampled Discrete-Time Modeling. IEEE Trans. Ind. Electron. 2016, 63, 2477–2487. [Google Scholar] [CrossRef]
- Jamshidpour, E.; Nahid-Mobarakeh, B.; Poure, P.; Pierfederici, S.; Meibody-Tabar, F.; Saadate, S. Distributed active resonance suppression in hybrid DC power systems under unbalanced load conditions. IEEE Trans. Power Electron. 2013, 28, 1833–1842. [Google Scholar] [CrossRef]
- Magne, P.; Nahid-Mobarakeh, B.; Pierfederici, S. DC-link voltage large signal stabilization and transient control using a virtual capacitor. In Proceedings of the Industry Applications Society Annual Meeting (IAS), Houston, TX, USA, 3–7 October 2010; pp. 1–8.
- Jamshidpour, E.; Nahid-Mobarakeh, B.; Poure, P.; Pierfederici, S.; Saadate, S. Distributed stabilization in DC hybrid power systems. In Proceedings of the Vehicle Power and Propulsion Conference (VPPC), Chicago, IL, USA, 6–9 September 2011; pp. 1–6.
- Middlebrook, R.D. Input Filter Considerations in Design and Application of Switching Regulators. In Proceedings of the Industry Applications Society Annual Meeting IAS, Chicago, IL, USA, 11–14 October 1976.
- Middlebrook, R. Design techniques for preventing input-filter oscillations in switched-mode regulators. In Proceedings of the Powercon, San Francisco, CA, USA, 4–6 May 1978; pp. A3.1–A3.16.
- Cespedes, M.; Xing, L.; Sun, J. Constant-power load system stabilization by passive damping. IEEE Trans. Power Electron. 2011, 26, 1832–1836. [Google Scholar] [CrossRef]
- Gavagsaz-Ghoachani, R.; Martin, J.; Pierfederici, S.; Nahid-Mobarakeh, B.; Davat, B. DC Power Networks with Very Low Capacitances for Transportation Systems: Dynamic Behavior Analysis. IEEE Trans. Power Electron. 2013, 28, 5865–5877. [Google Scholar] [CrossRef]
- Lee, W.-J.; Sul, S.-K. DC-link voltage stabilization for reduced DC-link capacitor inverter. IEEE Trans. Ind. Appl. 2014, 50, 404–414. [Google Scholar]
- Zadeh, M.K.; Amin, M.; Suul, J.A.; Molinas, M.; Fosso, O.B. Small-signal stability study of the Cigré DC grid test system with analysis of participation factors and parameter sensitivity of oscillatory modes. In Proceedings of the Power Systems Computation Conference (PSCC), Wroclaw, Poland, 18–22 August 2014; pp. 1–8.
- Kondratiev, I.; Santi, E.; Dougal, R.; Veselov, G. Synergetic control for DC–DC buck converters with constant power load. In Proceedings of the 35th Annual Power Electronics Specialists Conference, PESC, Aachen, Germany, 20–25 June 2004; pp. 3758–3764.
- Santi, E.; Li, D.; Monti, A. A geometric approach to large-signal stability of switching converters under sliding mode control and synergetic control. In Proceedings of the IEEE 36th Power Electronics Specialists Conference, Recife, Brazil, 12–18 June 2005; pp. 1389–1395.
- Saublet, L.-M.; Gavagsaz-Ghoachani, R.; Martin, J.-P.; Pierfederici, S.; Nahid-Mobarakeh, B.; Da Silva, J. Stability analysis of a tightly controlled load supplied by a DC-DC boost converter with a modified sliding mode controller. In Proceedings of the IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 15–18 June 2014; pp. 1–6.
- Rivetta, C.H.; Emadi, A.; Williamson, G.; Jayabalan, R.; Fahimi, B. Analysis and control of a buck DC-DC converter operating with constant power load in sea and undersea vehicles. IEEE Trans. Ind. Appl. 2006, 42, 559–572. [Google Scholar] [CrossRef]
- Marx, D.; Pierfederici, S.; Nahid-Mobarakeh, B.; Davat, B. Contribution to determination of domain of attraction in power systems: Application to drives with input filter. In Proceedings of the Industry Applications Society Annual Meeting, Houston, TX, USA, 4–8 October 2009; pp. 1–8.
- Lu, X.; Sun, K.; Huang, L.; Guerrero, J.M.; Vasquez, J.C.; Xing, Y. Virtual impedance based stability improvement for DC microgrids with constant power loads. In Proceedings of the Energy Conversion Congress and Exposition (ECCE), Pittsburg, PA, USA, 14–18 September 2014; pp. 2670–2675.
- Wu, M.; Lu, D.D.-C. A Novel Stabilization Method of LC Input Filter with Constant Power Loads without Load Performance Compromise in DC Microgrids. IEEE Trans. Ind. Electron. 2015, 62, 4552–4562. [Google Scholar] [CrossRef]
- Mohamed, Y.A.-R.; Radwan, A.A.A.; Lee, T. Decoupled reference-voltage-based active DC-link stabilization for PMSM drives with tight-speed regulation. IEEE Trans. Ind. Electron. 2012, 59, 4523–4536. [Google Scholar] [CrossRef]
- Magne, P.; Nahid-Mobarakeh, B.; Pierfederici, S. General active global stabilization of multiloads DC-power networks. IEEE Trans. Power Electron. 2012, 27, 1788–1798. [Google Scholar] [CrossRef]
- Thounthong, P.; Chunkag, V.; Sethakul, P.; Sikkabut, S.; Pierfederici, S.; Davat, B. Energy management of fuel cell/solar cell/supercapacitor hybrid power source. J. Power Sources 2011, 196, 313–324. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Quantity | |
|---|---|---|---|
| Input Filter Parameters | |||
| Filter capacitance | Cf | 10 | |
| Filter inductance | Lf | 43 | |
| Filter inductor resistance | rf | 0.02 | |
| DC-DC Converter Parameters | |||
| Boost capacitance | C | 10 | |
| Boost inductance | L | 100 | |
| Boost inductor resistance | r | 0.04 | |
| Source and Load Parameters | |||
| Source input voltage | Vg | 24 V | |
| Load Resistance | R | 70 | |
| Stabilizer Parameters | |||
| Stabilizer Gain | Kstab | −0.8 | |
| High-pass filter pulsation | ωn | 16,075 rad/s | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huangfu, Y.; Pang, S.; Nahid-Mobarakeh, B.; Rathore, A.; Gao, F.; Zhao, D. Analysis and Design of an Active Stabilizer for a Boost Power Converter System. Energies 2016, 9, 934. https://doi.org/10.3390/en9110934
Huangfu Y, Pang S, Nahid-Mobarakeh B, Rathore A, Gao F, Zhao D. Analysis and Design of an Active Stabilizer for a Boost Power Converter System. Energies. 2016; 9(11):934. https://doi.org/10.3390/en9110934
Chicago/Turabian StyleHuangfu, Yigeng, Shengzhao Pang, Babak Nahid-Mobarakeh, Akshay Rathore, Fei Gao, and Dongdong Zhao. 2016. "Analysis and Design of an Active Stabilizer for a Boost Power Converter System" Energies 9, no. 11: 934. https://doi.org/10.3390/en9110934