1. Introduction
Fretting happens when two contacting surfaces are normally loaded and subjected to small amplitude oscillatory relative movement. This amplitude generally varies from 5 to 100 µm [
1], but it can be as low as, or even below, 1 µm [
2]. Due to its cyclic characteristic and the high stresses gradient in the vicinity of contact, fretting may lead to unexpected failure due to fretting fatigue, being responsible for the premature failure of many common mechanical assemblies, such as bolted joints, shrink-fitted shafts, and dovetail joints. As a consequence, it has been an important research topic that has been vastly studied in the literature [
3,
4,
5,
6].
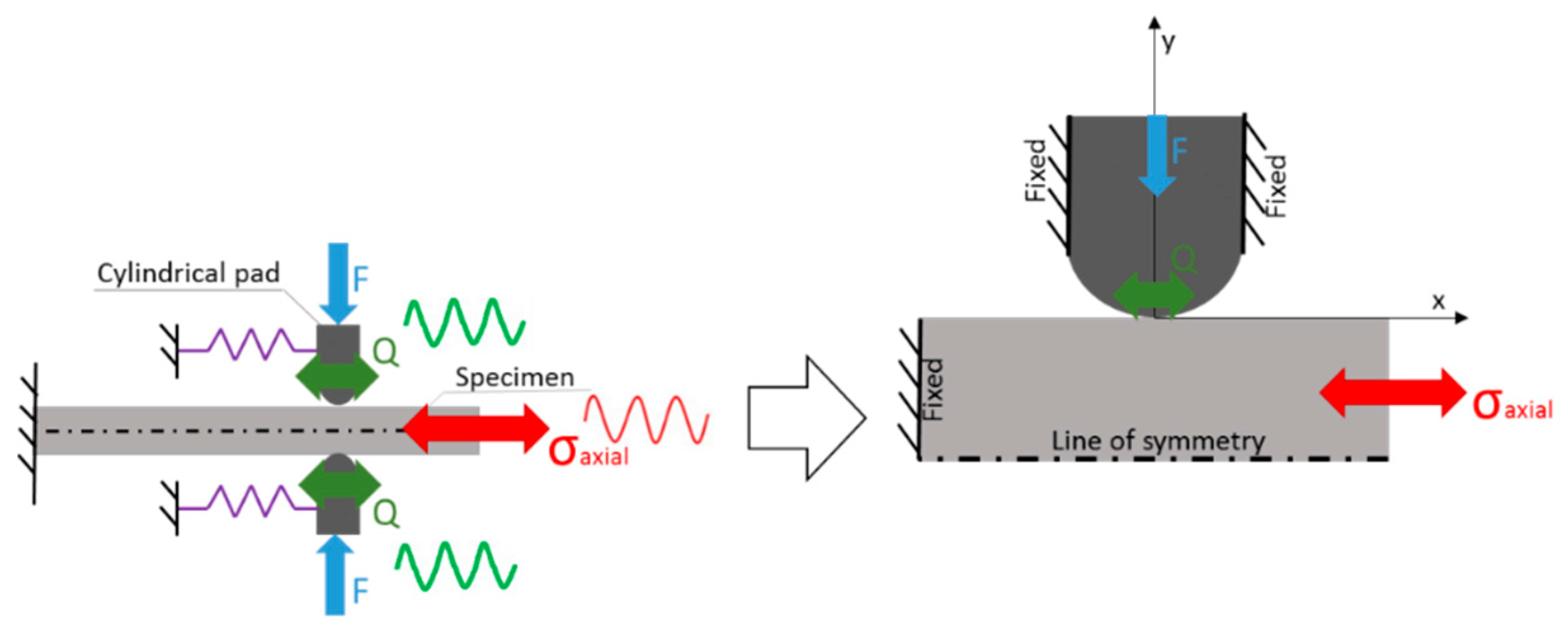
In order to evaluate the effects of different variables (surface finishing, coefficient of friction, normal load, relative slip amplitude, among others) on the characteristics of fretting, different laboratory tests are generally used. One of the most common is a cylinder-on-pad configuration, as illustrated in
Figure 1. In this set-up, two cylindrical pads are maintained in contact with a flat specimen through the application of a constant clamping or normal force,
F. The specimen is fixed at one end and the other end is subjected to an oscillatory bulk stress
σaxial. On application of the bulk stress, the compliance springs transmit an oscillatory tangential force,
Q, at the pads. Generally, the tangential load
|Q| is smaller than the product of the normal load,
F, by the coefficient of friction µ and the contact is divided into two regions: A stick zone and a slip region. In the early 1970s, Nishioka and Hirakawa [
7] had already used this configuration to study the effects of slip amplitude in the fatigue strength of specimens. Even in recent research, this test set-up is still very common. For instance, Pierres et al. [
8] proposed a combined numerical and experimental approach to simulate fretting fatigue crack growth of 2D and 3D configurations. A similar methodology was used by Luke et al. [
9], however, they were interested in simulating crack initiation using different damage parameters and they used laboratory tests to validated their predictions.
Under fretting conditions, the fatigue limit of a material may be shortened by up to 50% [
10]. It is known that, in this case, the crack growth phase is significantly different from plain fatigue propagation phase, due to the influence of contact stresses distributions on the crack and vice versa [
11]. This contact-crack interaction is particularly important for cracks’ length smaller than the magnitude of the contact zone dimension [
12] and must be taken into account. For a cylinder-on-plane configuration, the stress and strain field in the specimen can be analytically estimated by a combination of the normal pressure distribution
p(
x) (due to the normal force,
F) and surface traction
q(
x) (due to the tangential and bulk loads,
Q and
σaxial, respectively). However, these solutions are valid under a series of conditions, such as infinite and idealized bodies, elastic material properties, and loading conditions, among others. In addition, the stress field near the contact region is variable, multiaxial and non-proportional [
13], which provides extra complexity to the phenomena.
Fretting fatigue is a complex phenomenon due the stick-slip zone at the contact interface. This complex phenomenon is not well understood and a recent research report [
14] has questioned the applicability of the analytical solution (Cattaneo–Mindlin problem) to the stick-slip problems. In the analytical solution, the superimposing of shear stress due to normal load and due to fatigue load is a linear approximation and ignores the effect of interaction between both loads. Furthermore, recent laboratory measurements [
15,
16] indicated that the transition from ‘static’ to ‘dynamic’ friction (stick-slip) can be described by classical fracture mechanics singular solutions of shear cracks, rather than by Coulomb law. This motivates us to investigate whether or not stress singularity takes place at the stick-slip zone in fretting conditions.
Numerical methodologies have become an interesting option to evaluate stresses at contact and its impact on fretting fatigue lifetime. In this regard, the finite element analysis (FEA) has been widely used over the past few decades. For instance, McVeigh and Farris [
17] used finite element analysis to study the influence of the bulk loading
σaxial on the contact stresses distributions, and compared the results with analytical approximations, validating the latter. Tur et al. [
18] treated the problem considering the effects of plasticity on the contact stress distribution for a Titanium material and analyzed the impact of plastic deformations on the size of the stick zone and peak stresses. They concluded that the plastic zone started at the trailing edge (the edge of the largest slip zone) and that the effects of contact stresses decayed rapidly as the distance from the contact increased.
The focus of this paper is to recognize the existence of stress singularity at the stick-slip zone in fretting fatigue conditions using FEA. In order to do that, a finite element model of a fretting test configuration (cylindrical pad and flat specimen) was created and stresses at the contact interface were monitored and compared with analytical solutions for different mesh sizes and fretting contact conditions.
The paper is organized in the following way. Firstly, the analytical solutions of the contact stresses used as references in this study are described in
Section 2. Then the finite element models are constructed and details of them are provided in
Section 3. Finally, the results are presented and discussed in
Section 4 and conclusions are drawn in
Section 5.
3. Finite Element Model: Cylinder Pad on Flat Specimen
A parametric 2D finite element model was created in ABAQUS® and an analysis of the fretting cycle was performed, aiming to study the model response to different mesh sizes. Three values of coefficients of friction were considered (0.3, 0.85 and 2.0). These variable values of coefficient of friction (COF) allowed us to study different configurations of stick-slip regions and, therefore, to simulate different fretting scenarios.
The model details, such as geometry, material properties, mesh details, boundary conditions and loading history, are presented here. Two FE models were developed and their dimensions and boundary conditions are shown in
Figure 5. The models were composed of only two parts: A pad and a specimen, which represents half of the experimental set-up, due to its symmetry. In order to check the influence of different geometries, the radius of the pad was also variable in those models, and two values were chosen: 50 mm and 10 mm. Both parts were made of aluminum 2420-T3, having material properties which are summarized in
Table 1. We did not consider any plasticity effect in this study, only an elastic material response. Stress analysis was carried out by applying a normal load (
F = 543 N) and oscillatory axial and reaction stresses to the specimen, reflecting a fretting cycle.
The master-slave algorithm in ABAQUS® was used to describe the contact behavior and the Lagrange multiplier formulation was used to define the tangential behavior of the contact pair. The surface-to-surface and finite sliding options were used to define the contact interaction.
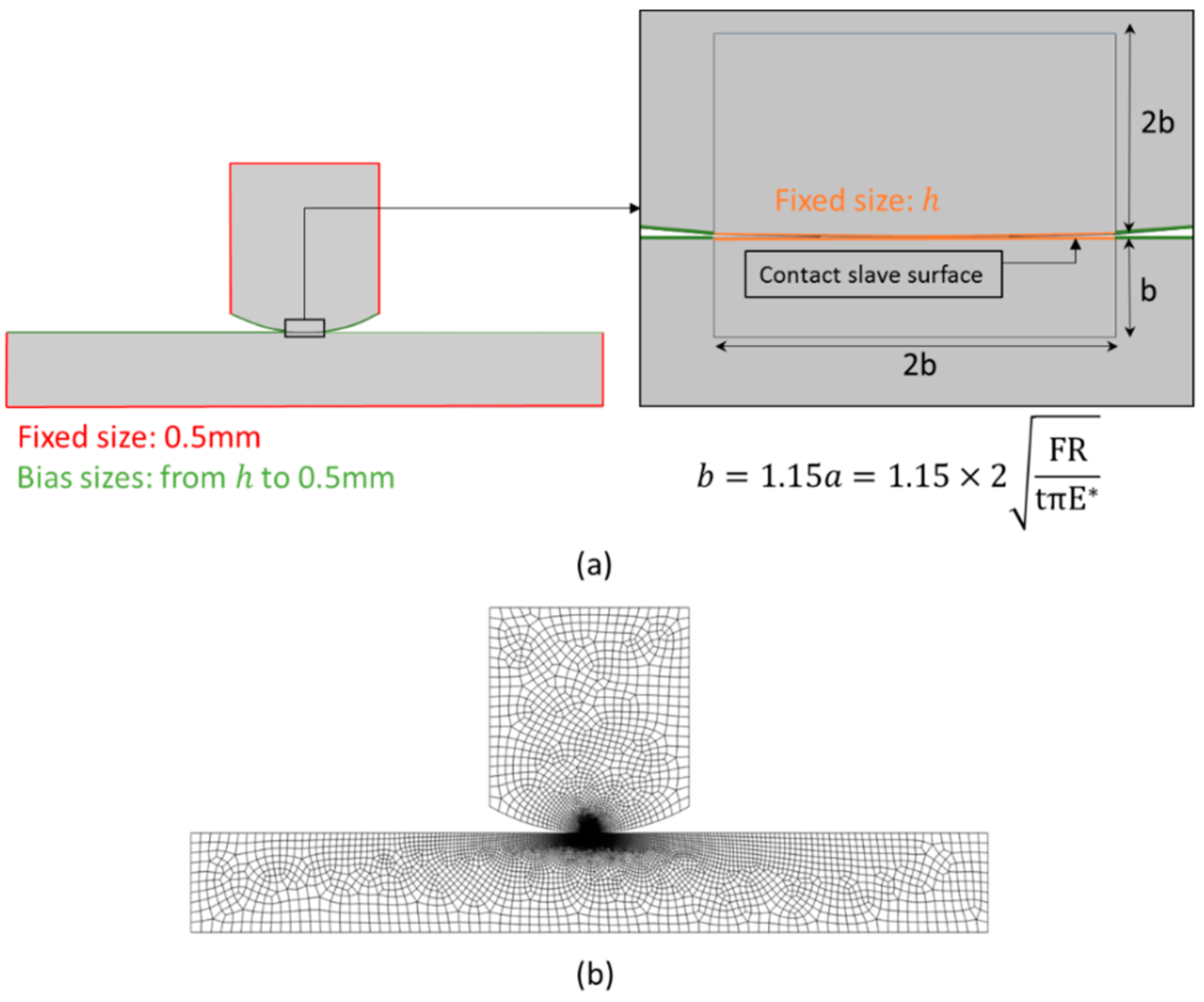
A 2D quadrilateral, 4-node (bilinear), plane strain, reduced integration element (CPE4R) was used in both models. Different mesh sizes were considered at the contact interface and increased as the distance from the contact region increased. In order to create a fine mesh at the contact region, the models were partitioned and the edges were seeded. The values of the mesh element size along the contact region varied according to the following list: 20, 10, 5, 2.5, 1.25, 0.625 and 0.3125 µm. Details of the seeding used to generate the mesh and also of the model partition dimensions are shown in
Figure 6. The partition dimensions were dependent on the radius of the pad, being calculated based on the semi-contact width,
a, from Equation (4). An illustration of one of the meshes used in this study is also presented in
Figure 6.
Due to the symmetry of the problem, the bottom of the specimen (representing the axial centerline of the specimen) was restricted from vertical movement in the y direction (Uy = 0). The sides of the pads were restricted from horizontal movement in the x direction (Ux = 0) and the Multiple point constraints (MPC) tie constraint was also used at the top surface of the pad to guarantee that it would not rotate due to the applied concentrated load, F.
The effect of the compliance spring and tangential load
Q were modeled as a cyclic reaction stress (
σreaction). This reaction stress is obtained as:
where
b is the specimen width (
b = 10 mm);
t is the specimen thickness (
t = 4 mm). The values of
Q and
σaxial are obtained from experimental data (see
Table 2). For this study, they are taken from the experimental set-up FF1 in Reference [
25].
In order to simulate fretting fatigue conditions, the loads are applied in three steps (see
Figure 7), with adaptive time steps in ABAQUS
®. In the first loading step, the top pad was pressed against the specimen surface by a normal load
F = 543 N and this compressed condition was held constant until the end of the cycle. Then, both axial and reaction maximum stresses were applied to the sides of the specimen (values are presented in
Table 2). Finally, in the third loading step, both axial and reaction minimum stresses were applied.
4. Results and Discussion
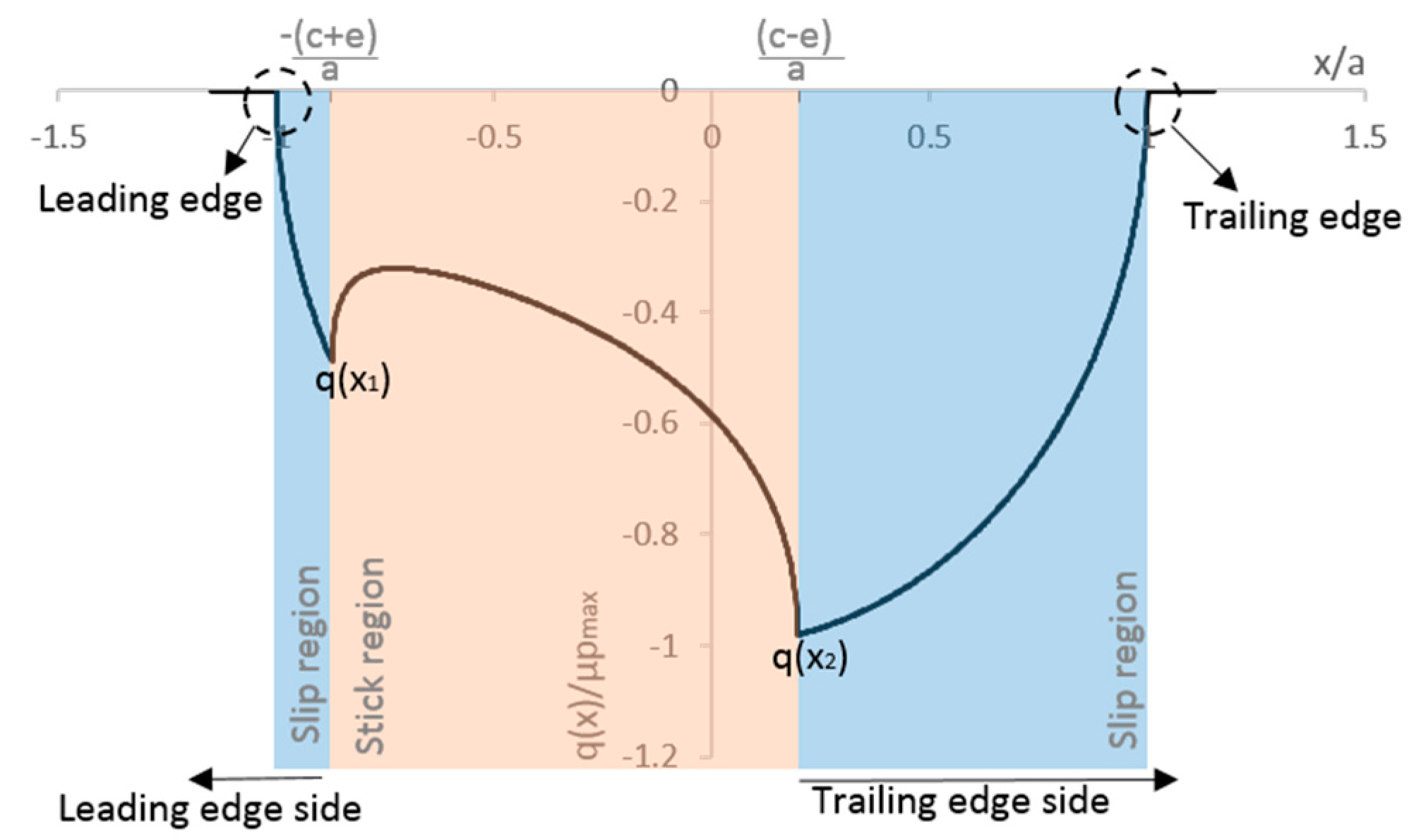
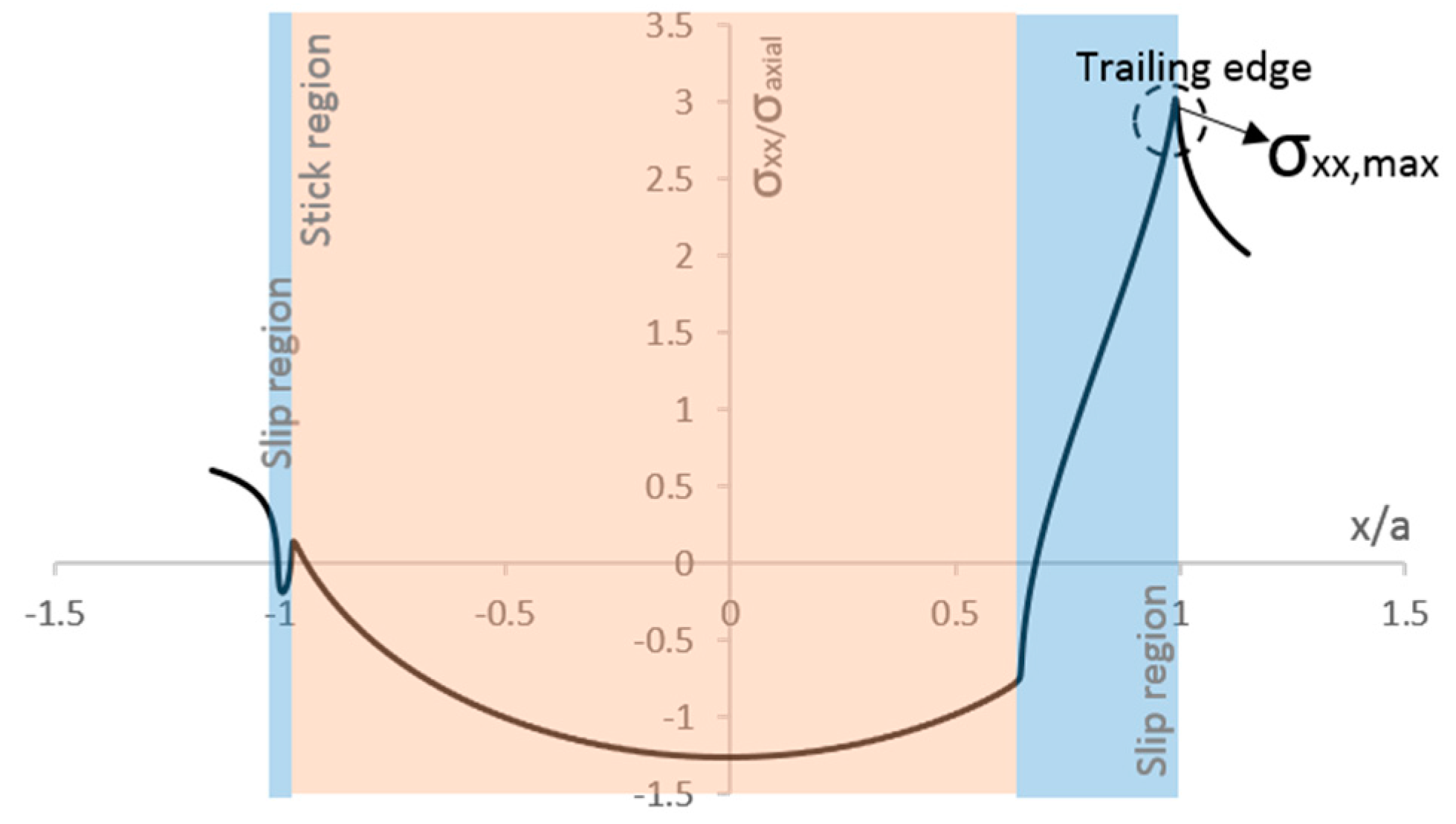
In order to recognize a singularity’s presence, the methodology presented by Sinclair [
27] was adopted. Accordingly, the element size in the models was successively systematically halved for a sequence of seven analyses and the magnitude of maximum stress values was examined. The following stress components were monitored at the maximum axial loading condition (end of loading step 2): The contact shear traction peak at trailing edge side
q(
x1) and at leading edge side
q(
x2) (see
Figure 3) and the peak tangential stress in the
x direction,
σxx,max (see
Figure 4). The influence of the mesh size on the values of the ratios between stick and slip zones sizes (
c/
a) is also considered here. The slip zone size,
c, is obtained by measuring the position in the contact that have non-zero values of slip and the contact width,
a, is obtained by the position in the x direction of the edges of the contact region, both calculated from ABAQUS
®.
The results of various stress components and for the ratios between stick and slip zones sizes (
c/
a) are presented in
Table 3, for different values of coefficient of friction and different radius of cylindrical pad. FEA results were also compared with analytical solutions (Equations (6) and (7), presented in
Section 2.3 and
Section 2.4, respectively). The values of shear traction at trailing and leading edges seem to converge to the analytical solution for all values of coefficient of friction. Regarding the values of peak tangential stress
σxx,max, they seem to converge, but to a different value than the estimate from Equation (7). This is reasonable, since this equation provides only an approximate value of
σxx,max. Note that the non-dimensional parameter (
c/
a) also converges on the analytical solution for all values of coefficient of friction and pad radius.
To examine convergence in
Table 3, the relative error between FE and analytical solutions was considered. If those errors do not decrease with successively refined analysis, divergence occurs and the presence of a singularity is detected.
4.1. Stress Singularity Check: Influence of Mesh Size on Stress Components
In order to analyze the influence of mesh size on the contact shear traction, the analytical solution was chosen as a reference value. The relative error between FE and analytical solutions (
erel,an) was calculated as:
where
is the maximum variable output (contact shear stress, maximum tangential stress or ratio between stick slip zone sizes) in the
ith model and
in the analytical solution (see
Table 3).
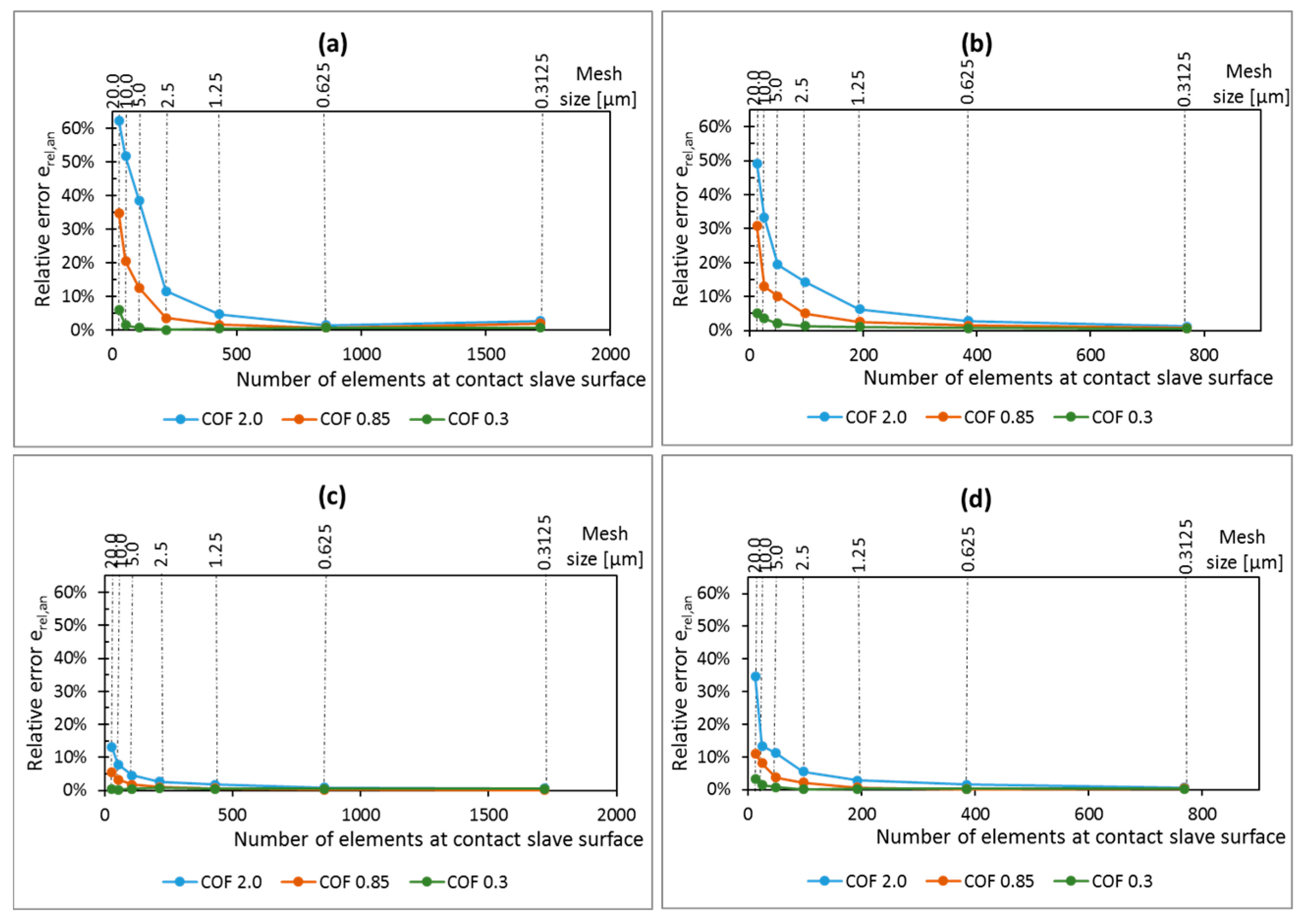
Higher coefficient of friction implies stronger gradients in the stress distribution, and singularities are expected to happen for higher values of coefficient of friction. The relative error between FE and analytical solutions for the contact shear traction stress component for different coefficients of friction and pad radius are presented in
Figure 8. The results show that the error is decreasing as the mesh size reduces, independent of the value of coefficient of friction and pad radius. Thus, the analysis is converging, even if only slowly, and no singularity was found for any of the tested loading conditions, pad radius, and coefficients of friction.
Moreover, it can also be seen that the rate of convergence is dependent on the coefficient of friction for both cases of pad geometry. As different values of coefficient of frictions represent different loading conditions (various sizes of stick zone in comparison with the contact dimension), one might conclude that the rate of convergence of the solution depends on the loading condition. For the smallest coefficient of friction, a relative coarse mesh (around 20 µm) at the contact is sufficient for obtaining reasonable accurate shear stresses at contact, with relative error smaller than 10% for all analyzed cases. However, for higher coefficients of friction, the rate of convergence reduces and it is necessary to use relative fine meshes to guarantee reasonable results. For instance, for coefficient of friction equal to 2.0, a mesh size of 1.25 µm is enough to guarantee that the relative error on the shear traction peak is smaller than 10% for all analyzed cases. However, for the same coefficient of friction and a mesh size of 5 µm, the error can increase to almost 40%, for the contact shear traction peak at leading edge.
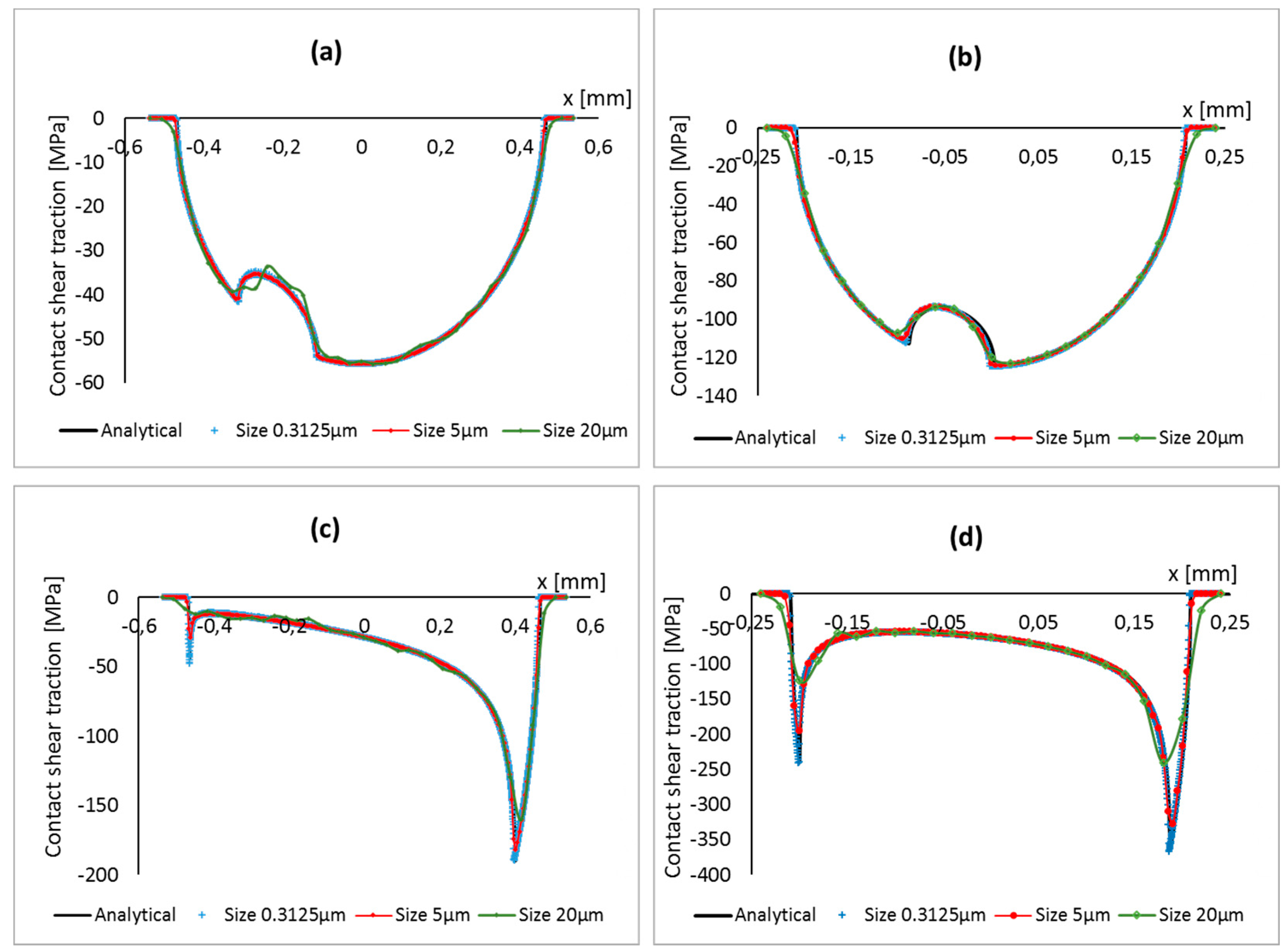
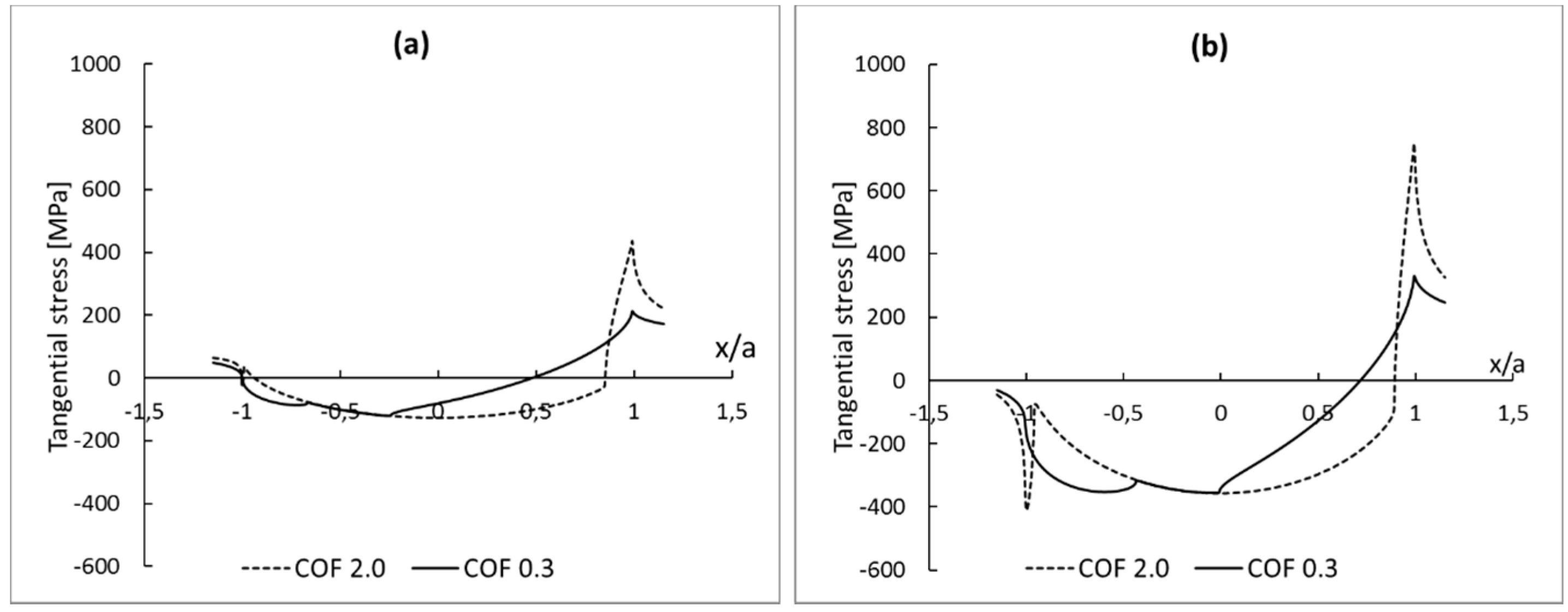
The dependence of the rate of convergence on the coefficient of friction can be further investigated by analyzing the contact shear traction at contact interface. As can be seen in
Figure 9, for the case of high coefficient of friction, the contact shear traction distribution has very sharp peaks at both leading and trailing edges, justifying the necessity of a very fine mesh to accurately capture those steep gradients. It is clear that for a higher coefficient of friction, a very fine mesh size is required in order to achieve convergence. This is due to the fact that the value of the friction coefficient affects the contact stress distribution and the larger the coefficient of friction, the steeper the stress gradient. The value of coefficient of friction also affects the stick-slip zone size, which is an important parameter to determine a suitable mesh size as explained in
Section 4.2.
As discussed before, the peak stress
σxx,max, seems to converge to a different value than the estimate from Equation (7). Therefore, in order to study the convergence of the results of the, instead of considering the analytical solution as a reference, the maximum stresses between two subsequent mesh refinements were used to calculate the relative error
erel as:
where
is the maximum variable output (contact shear stress, maximum tangential stress or ratio between stick slip zone sizes) in the
ith model and
in the
(i + 1
)th model.
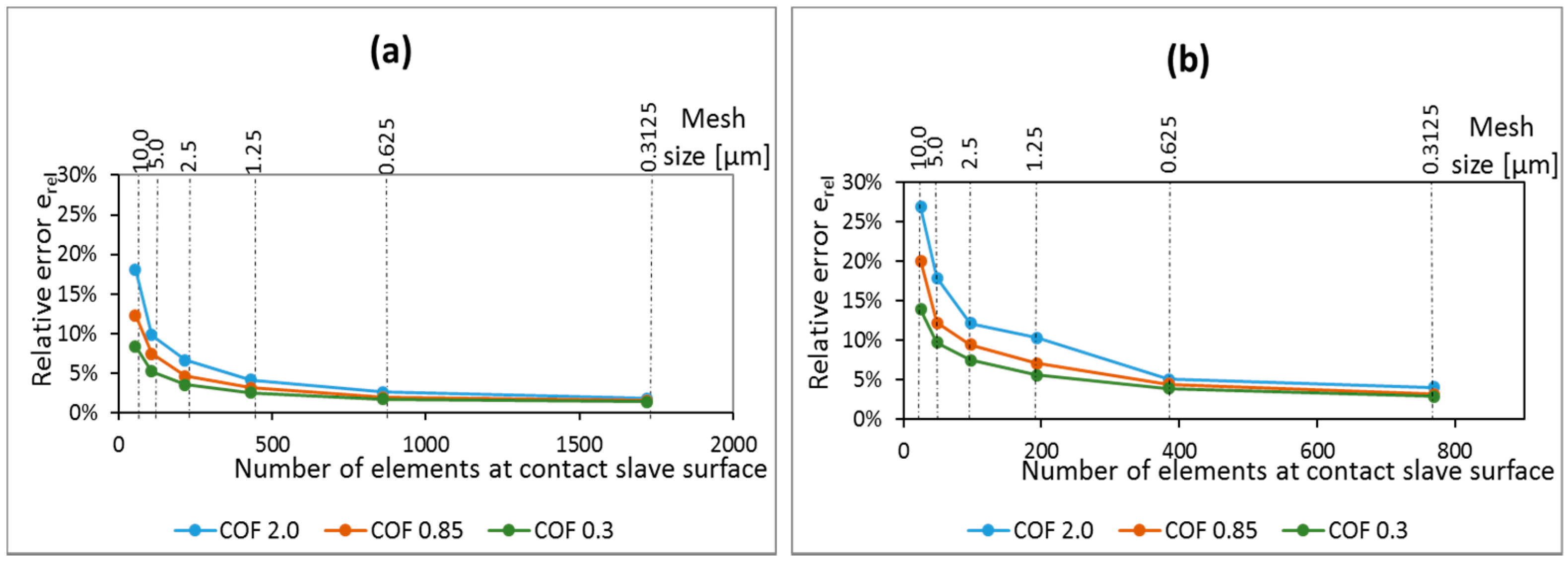
The results of the relative error between two consecutive mesh sizes for the maximum tangential stress are presented in
Figure 10. The results also show that the error reduces with successively refined analysis, independent of the value of coefficient of friction or pad radius. Thus, once again, one may conclude that the analysis is converging and no singularity’s presence was found.
Additionally, some comments regarding the convergence rate can be made. For a mesh size of 0.625 µm, the relative error is around 5% for all analyzed scenarios, and results can be considered to be good [
28]. As for the shear traction component, the convergence rate of the maximum tangential stress depends upon the coefficient of friction. Again, for the smallest coefficient of friction, the convergence rate is the highest. This dependency may be further investigated by checking the tangential stress distribution at contact, as shown in
Figure 11.
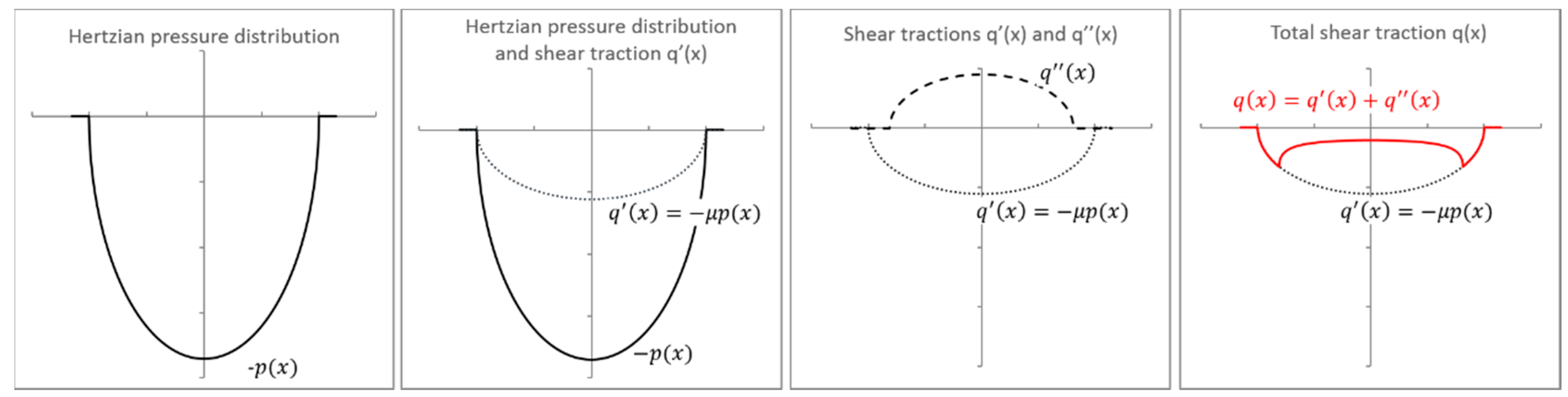
As mentioned in Reference [
29], increasing the pad radius causes a reduction on the peak contact pressure and increases the contact width. Therefore, for the same loading conditions, the contact pressure distribution has a steeper gradient for pads with smaller radius. As discussed by the authors of [
12,
19], and presented in
Section 2, the analytical distribution of shear stress at contact can be seen as a superposition of contact pressure distribution and two shear tractions (
Figure 2). Thus, it is expected that the gradient of the distribution of the tangential stresses at the trailing edge is higher for the model with smaller pad radius. The smaller contact width for smaller pad radius also implies higher peak values of tangential stresses in a smaller area (
Figure 11). Therefore, for the same loading conditions, a finer mesh is necessary to properly to capture this changes in the model with a smaller pad radius.
It can also be observed in
Figure 11 that the peak values and, therefore, the gradients of the distribution of the tangential stresses are smaller for low coefficients of friction. Consequently, the convergence rate, for the model with a 10 mm pad radius, is slower than for the model with a 50 mm pad radius, as can be seen in
Figure 10. This impact of geometry on convergence rate is expected, as the smallest radius implies smaller contact region (Equation (4)) for the same loading condition. It also implies higher peaks of tangential stresses in a smaller area. Thus, for the same level of accuracy, a finer mesh is required in the model with a smaller pad radius.
4.2. Fretting Fatigue Convergence Map
As pointed out by Ainsworth and Oden [
30], although aware of the existence of numerical errors, the analyst is seldom interested in quantifying them. In fretting fatigue, the quality of a simulation is generally assessed by visual comparison between finite element results and analytical solutions [
18,
31,
32], and information regarding the error is rarely provided [
22]. The accuracy of the fretting contact stress calculations is of significant importance, as these stresses impact directly on the crack propagation phase. Therefore, estimating errors for those stresses is of great interest to ensure an accurate analysis.
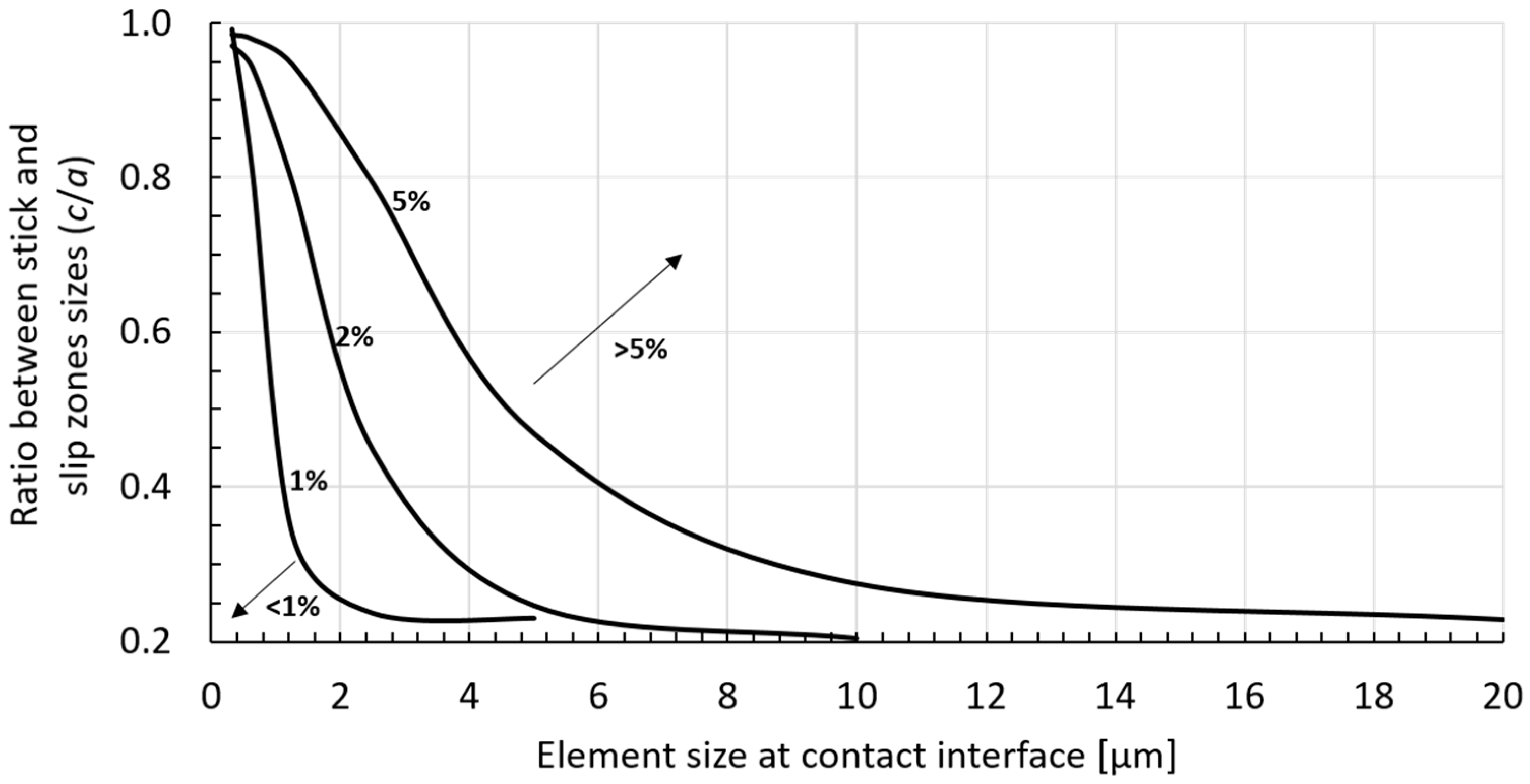
Aiming to help researchers to easily determine the required element size for their finite element analysis for a given stick-slip ratio and desired accuracy, a ‘fretting fatigue convergence map’ was produced and is presented in
Figure 12. This map was constructed by plotting the stick–slip ratio (c/a) against the element size in the contact zone for different numerical accuracies (1%, 2% and 5%) and may be used as a reference for choosing the element size in FEA of fretting fatigue (cylinder on plane configuration).
5. Conclusions
In this paper, we investigate the singularity’s presence in fretting fatigue stresses distributions at a contact interface. Different scenarios were studied: Three different coefficients of friction (replicating different loading conditions) and two different pad geometries (radius of 50 mm and 10 mm). For the considered loading conditions and coefficient of frictions, we could not find any indications that a singularity happens as the mesh becomes denser, our results all converged as the element size reduced. Additionally, the convergence rate of the finite element models was discussed as a function of the coefficient of friction. We have confirmed that the convergence rate is smaller for higher coefficients of friction. This means that, for a fixed element size, the level of error in the analysis depends on the loading condition. Therefore, it is recommended that the analyst perform a mesh convergence study for each of his loading condition of interest, as it may impact the accuracy of results. Considering all scenarios that we have studied, a choice of element size of 0.625 µm at contact provided the smallest relative error for all variables, being around, or even smaller than, 5% and producing satisfactory results. A ‘fretting fatigue convergence map’ was also constructed, providing information on the required element size for a specific stick–slip ratio and different levels of accuracy.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}