1. Introduction
Hyrcanian forests are known as remnants of the Pleistocene era that survived the frost period [
1]. These forests are located in regions of northern Iran and part of Caucasus, and embrace a high species and structural diversity of uneven-aged mountainous broadleaf forests distributed across a high altitudinal gradient [
1,
2]. Recently, portions of these forests were inscribed in the list of UNESCO World Natural Heritages [
3]. The growing stock volume (GSV) is one of the important allometric biophysical forest attributes. It is closely related to other forest quantities such as height and aboveground biomass and is of great importance in the forest ecology, management, and carbon storage [
4,
5]. Tree-level biomass is conventionally derived by using species-specific allometric relations and wood density from ground-based measurements. However, the high cost, time, and the limited geographical coverage prohibitively challenge these methods. On the other hand, remote sensing data from spaceborne SAR and multispectral sensors with proper radiometric and spatial resolution and sufficient time intervals of data acquisition from the desired areas have been proven to provide important proxies in forestry research [
6,
7]. Due to mentioned historical and environmental reasons, development and implementation of remote sensing-assisted methods serve the overarching aim of monitoring and sustainable management of Hyrcanian forests.
Amongst the recent attempts for GSV estimation by state-of-the-art multispectral data, Chrysafis et al. (2017) [
8] estimated the GSV by blending the Sentinel-2 and the Landsat data with the Random Forest (RF) model, and concluded that near-infrared and the red edge domains greatly affect GSV estimation. In addition, Mura et al. (2018) [
9] estimated the GSV by the Sentinel-2, Landsat, and the Rapideye sensors and concluded that, beside the near-infrared and red edge regions, the SWIR region is also effective because of its sensitivity to the water content in the canopy. In both studies Sentinel-2 data were suggested to excess others in performance.
The radio detection and ranging (radar) sensors considerably contributed to solving the limitations of optical sensors including their inability to penetrate the canopy and less sensitivity to the vertical canopy structure. The ability of radar data to estimate biophysical forest characteristics is also less susceptible to weather conditions and acquisition time, which eases monitoring of mountainous forests that mostly occur in humid, cloudy, and foggy areas. However, changes in radar wavelength and type of polarization results in differences in both analytical workflow and the achieved estimation performance. Moreover, higher trunk volume leads to underestimation of actual GSV values due to the saturation in the scattering form dense canopy, which improves with an increase in wavelength [
10,
11,
12]. Gao et al. (2018) [
13] estimated GSV by the Dual polarized ALOS-1 data and reported a higher potential and later saturation of L-band HV cross-polarization channel than HH co-polarized channel. By using multi-temporal dual polarized ALOS-1 sensor data, Antropov et al. (2013) [
14] concluded that the multi-temporal method was superior in prediction (with HH co-polarized channel performing better for mature trees), yet the saturation happens in the high GSV values. In addition, Chowdhury et al. (2014) [
15] estimated the GSV by the ALOS-1 multi-temporal full polarimetric data, from which covariance and coherency matrices, as well as the phase difference between HH & VV channel and the coherency between HH and VV channels, were extracted. They showed that full polarimetry data has a high ability for GSV estimation.
Multi-sensor remote sensing approaches are highly capable for forest applications. In our study, we percept GSV estimation over mountainous broadleaf forests from a slightly different perspective. The biophysical characteristics of forest can be studied in multi-spectral approach by focusing on the biochemical aspects such as chlorophyll and in SAR approach on radar wave penetration in the canopy [
16,
17]. Mauya et al. (2019) [
18] estimated GSV by the ALOS-2’s global mosaic, the Sentinel-1 and the Sentinel-2 sensors data. They concluded that using SAR data alone was unlikely to provide a good estimation ability for GSV, while a combined use of Sentinel-1 and Sentinel-2 data were advantageous. In Iran’s Hyrcanian region, recent investigations of the ability of remotely sensed data and methods include Vafaei et al. (2018) [
19] who estimated biomass by the ALOS-2 full polarimetric and Sentinel-2A data. The Sentinel-2 returned the moderate accuracy, whereas the ALOS-2 individually led to minimum estimation accuracy.
The overall objective of this research was to estimate the GSV in Hyrcanian uneven-aged mountainous broadleaf forests based on leveraging a broad range of possibilities in optical and radar data processing. To this aim, we used ALOS-2 full polarimetric, Sentinel-1 dual polarimetric and Sentinel-2 multi-spectral data. We only concentrated on combined use of polarimetric and spectral features. In addition, we compared five different kernels in support vector regression (SVR) for GSV estimation. We additionally applied a heuristic feature selection by binary genetic algorithm, in which we simultaneously optimized the root mean square error (RMSE) and coefficient of determination (R2) for each kernel separately. The workflow and findings of this study are mainly significant due to multiple challenges associated with the structure and composition of our test site, including the severe topography, limited field samples, highly mixed tree species in various ages, and complex slope-aspect structure.
4. Discussion
The main objective of this research was to estimate the GSV in heterogeneously-structured and mountainous Hyrcanian forests in northern Iran. Predictive models and continuous monitoring of forest are especially vital in Iran’s Hyrcanian forests because of the current ongoing rate of degradation and their crucial role in Iran’s Hyrcanian forest ecosystem. Thus, investigating the potential of multi-frequency SAR, multi-spectral optical data for generating the reliable predictive models are essential in this study area. In this research, the GSV modeling was carried out using the polarimetric and multi-spectral features and their combination using three different approaches. The SVR with five various kernels was used for modeling because of non-linear and complex relation of features with the GSV particularly in multi-sensor approach. Also, there were several challenges in this procedure including the severe topography, limited field samples, highly mixed tree species in various ages, and complex slope-aspect structure.
In the first experiment, the GSV was modeled using the Sentinel-2 multi-spectral features. B11 and B12 bands from SWIR spectral region showed a high contribution because of their sensitivity to the water content in the canopy, that confirmed in research by Chrysafis et al. (2017) [
8] and Mura et al. (2018) [
9]. We also found the NIR and the red edge bands as good features in modeling which is due to their sensitivity to the chlorophyll and pigments of tree leaf. Relevant works of Chrysafis et al. (2017) [
8], Mura et al. (2018) [
9], and Chrysafis et al. (2019) [
62] also described these features as influential features for the GSV estimation in their research. Basically, the vegetation indices that use the NIR and red-edge spectral bands have an effective contribution in the GSV estimation. This is mainly because of that the VI uses the combination of spectral bands and reaches the information that cannot be extracted from the single spectral band, as Chrysafis et al. (2017) [
8] found this in their research. The Mura et al. (2018) [
9] and Chrysafis et al. (2019) [
62] also found that VIs have an effective contribution to GSV estimation.
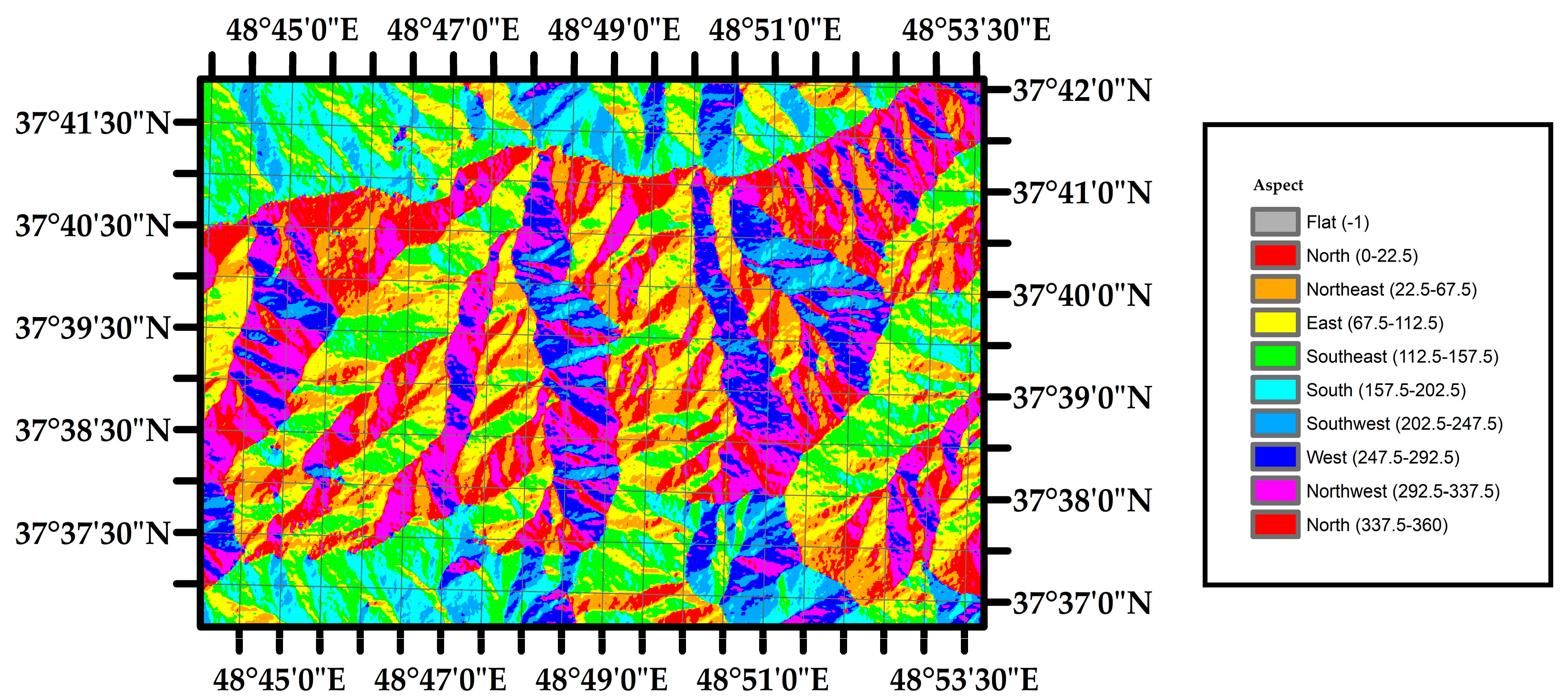
The performed analysis indicated that the GSV modeling with ALOS-2 polarimetric features produced non-satisfactory results. However, increasing the number of polarimetric features can improve the results. The two main challenges for GSV modeling with ALOS-2 data in this study area are the harsh topography and the limited number of field inventory samples. As shown in
Figure 6, the study area embrace harsh mountainous forest stands with high elevational gradient and complex slope-aspect structure. In this type of topography, phenomena like shadow and layover occur in SAR data. Particularly, no scanned data from the study areas were found for shadowing. Nevertheless, the radiometric values were significantly affected in layover behavior. Another effect is the POA (see
Section 2.3.3) which was compensated in the preprocessing steps and thus results in no notable problem for the GSV modeling [
43]. Yet the effect of slope in range direction, known as angular variation effect (AVE), still remains. In areas with forest cover and longer radar wavelength, the AVE introduces a notable effect. As such the double scattering mechanism increases in the slopes that face the radar incoming wave, whereas it decreases in opposite slopes. In addition, the volume scattering mechanism increases since the severe topography causes an increase in cross-pol scattering. In a severe mountainous area like our research site, the proposed correction methods do not completely refine the results [
42,
63]. In addition, a further effect is the effective scattering area due to the non-homomorphic imagining of radar. This effect can be maximized in the mountainous areas and thus dramatically affect the geo-referencing of the applied SAR data. This effect causes the higher radiometric values in front slopes facing the incoming radar wave and lower radiometric values in opposite slopes [
42,
43,
63].
The second challenge for modeling GSV is caused by limited number of field inventory samples that is commonly the case across heterogeneously-structured uneven-aged Hyrcanian forests. Apart from statistical and model-related problems, this particularly hindered us from building species-specific GSV models and thus considering differences in scattering from tree species or different age classes. The collective effects of the above mentioned issues led to the rather mediocre results obtained by ALOS-2 data in our study (see
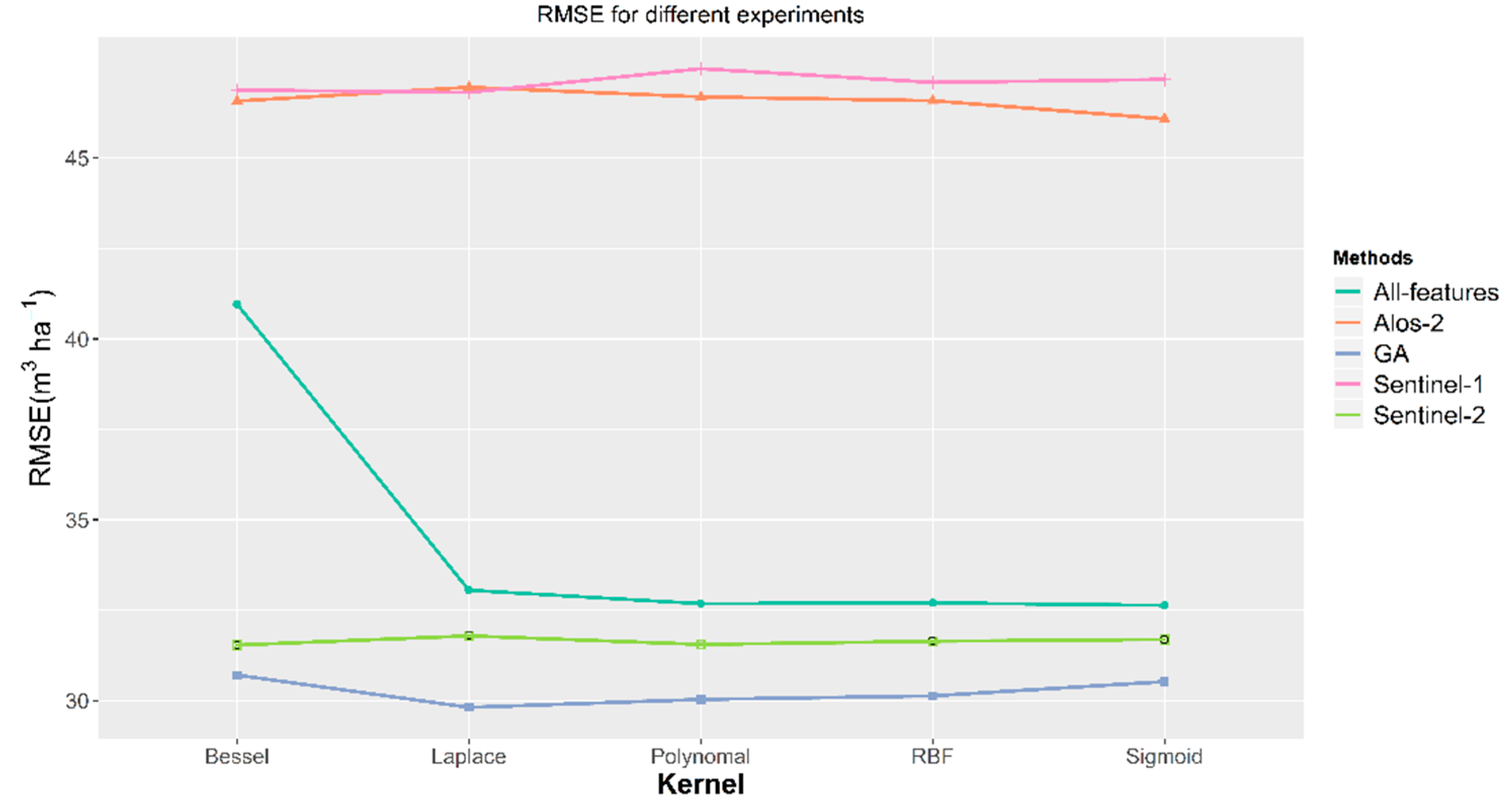
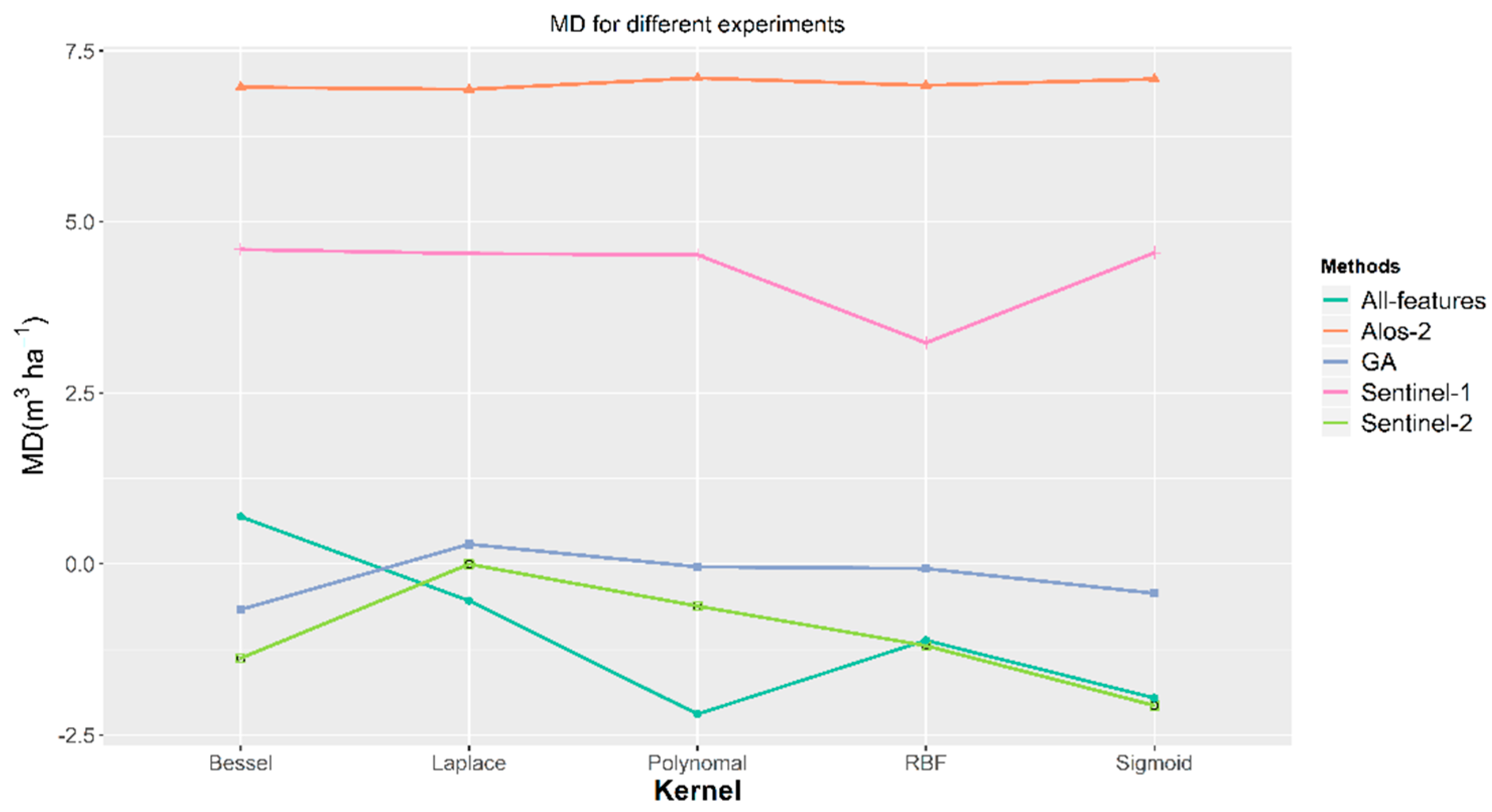
Figure 3,
Figure 4 and
Figure 5). The H-A-Alpha decomposition features have an average ability in the GSV estimation. Vafaei et al. (2018) [
19] found that these features have an average ability for biomass estimation in Hyrcanian forests too. The Touzi decomposition’s features are also effective, Sharifi et al. (2015) [
64] found that the Tozi decomposition describes the target asymmetry in the forested area and can use for biomass estimation in Hyrcanian forest. The Van Zyle, Cloude, and Freeman decomposition features based on volume or double mechanism are effective in GSV modeling because of L-band wavelength penetration in the canopy and interaction with the tree’s stem and ground. So they are reasonable features for the GSV modeling as Kumar et al. (2012) [
65] found this behavior. The achieved performance and model stability are comparable to similar research. Compared with the only available relevant case study from the area, Vafaei et al. (2018) [
19] used limited polarimetry features. Unlike their study, we extracted a large number of polarimetric features in our research. Especially comparing to Vafaei et al. (2018) [
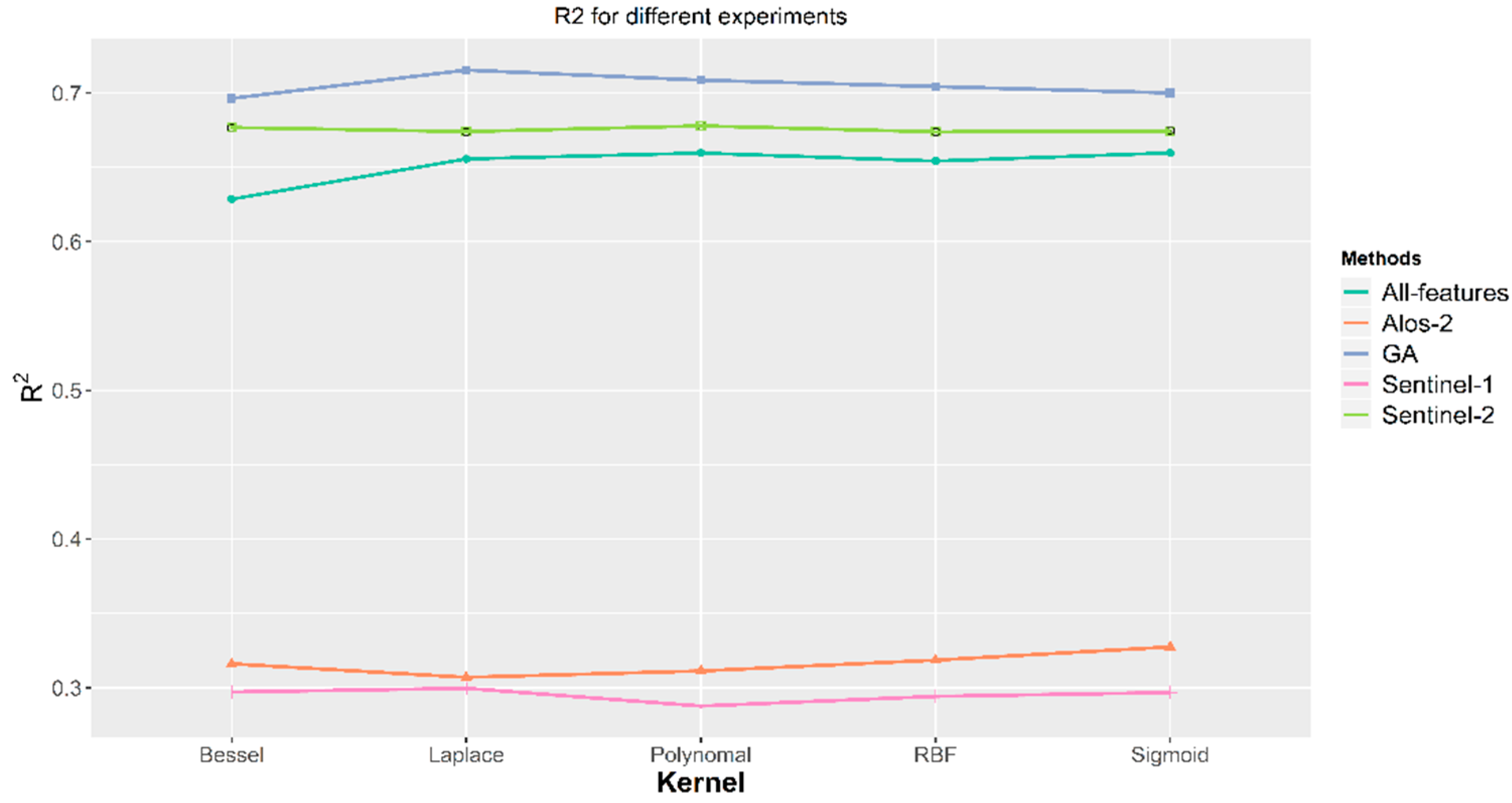
19] with ALOS-2 in the same region, his conclusion is that ALOS-2 has a very weak ability for biomass estimation (
R2 = 16%). Since the biomass and GSV have near relation [
5], we greatly improved the prediction ability for GSV with different target decomposition features (
R2 = 32%).
The performed analysis indicated that the modeling with Sentinel-1 polarimetric features produced non-satisfactory results for GSV modeling. The Sentinel-1 features are not frequently used in forestry research because of the shorter wavelength (C-band) of the data. In this wavelength, the scattering only occurs in the upper part of the canopy. In our study, we applied the dual polarimetric H-A-Alpha decomposition. Our result has better performance (
R2 = 29%) than Mauya et al. (2019) [
18] who only used the scattering coefficient in GRD mode and achieved
R2 = 18%. Therefore, we can conclude that using the Sentinel-1 dual polarimetry H-A-Alpha decomposition is useful for GSV estimation. As can be seen in
Figure 3,
Figure 4 and
Figure 5, the results obtained by the Sentinel-1 data were inferior than those of Sentinel-2 and ALOS-2 data. In addition to the underlying reasons as referred earlier, one may also note the lower penetration rate of the C-band Sentinel-1 compared with the L-band ALOS-2. This will result in a lower sensitivity to biophysical parameters such as GSV.
Finally, the performed analysis on the multi-sensor approach indicated that the GSV modeling with all of the features did not enhance the results compared to the modeling by Sentinel-2. This is mainly due to the curse of dimensionality effect and the limited sample size. To deal with this problem, we modeled the GSV by multi-sensor approach using the selected features. The results indicated that the modeling with the selected features provide better results than the modeling by Sentinel-2. The features were selected for each kernel separately proper feature selection procedure provides a good and stable GSV modeling which is not suffering from the curse of dimensionality anymore. Also, the over-estimation or under-estimation was reduced greatly by our feature selection method (see
Figure 5). As a result, the simultaneous integration of multi-spectral and radar data features produce satisfactory and stable models for GSV modeling compare to the Mauya et al. (2019) [
18], Vafaei et al. (2018) [
19], and Sharifi et al. (2015) [
64] works. Due to the general novelty of in-depth and state-of-the-art remote sensing analysis over Hyrcanian forests. In future research, issues such as the effects of different topographic corrections for polarimetry data, forest species type mapping, novel SVR kernels, application of feature fusion, and texture features will be explored.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}