Detection of Pine Wilt Disease Using Drone Remote Sensing Imagery and Improved YOLOv8 Algorithm: A Case Study in Weihai, China

 ,
,
Abstract
:1. Introduction
- (1)
- The addition of a small object detection layer to the Neck module, thereby expanding the receptive field for small objects and mitigating the detection of redundant larger targets. This results in a reduction in false positives and the elimination of redundant detection boxes;
- (2)
- The introduction of an attention mechanism module into the backbone network, facilitating weighted processing of the input feature map. Subsequently, The SPPF module is employed for multi-scale pooling, enabling the extraction of more distinctive multi-scale image features;
- (3)
- Experimental results demonstrate that our proposed enhanced YOLOv8 model exhibits a substantial improvement in PWD detection accuracy. It also demonstrates robust generalization capabilities and offers valuable technical support for pine forest management.
2. Materials and Methods
2.1. Overview of the Study Area and Data Collection
2.2. Preprocessing of Drone Image Data
2.3. Improvement of the YOLOv8 Model
2.4. Experimental Environment and Metrics
3. Experimental Results
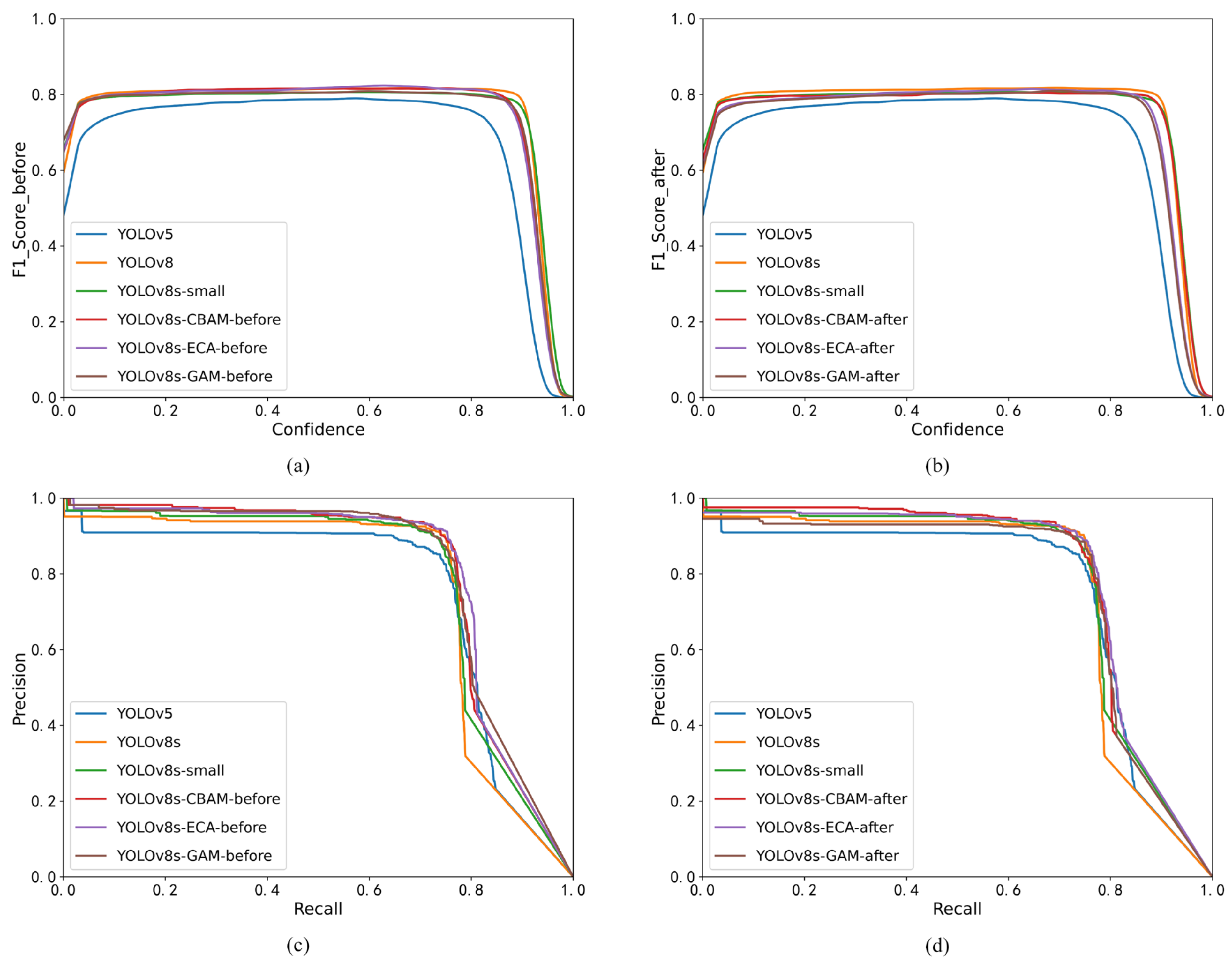
3.1. Assessment of the Precision of Quantitative Detection of PWD

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Evaluation Metrics | |||
|---|---|---|---|---|
| mAP-50 | mAP50-95 | F1-Score | Mean | |
| YOLOv5 | 75.2 | 50.2 | 79.0 | 68.1 |
| YOLOv8n | 78.5 | 58.7 | 81.7 | 73.0 |
| YOLOv8n-Small | 79.9 | 60.7 | 82.1 | 74.2 |
| YOLOv8n-CBAM | 77.3 | 53.8 | 79.0 | 70.0 |
| YOLOv8n-ECA | 76.3 | 52.5 | 79.6 | 69.5 |
| YOLOv8n-GAM | 79.7 | 58.1 | 81.1 | 73.0 |
| YOLOv8s | 76.5 | 62.7 | 81.8 | 73.7 |
| YOLOv8s-Small | 78.6 | 66.8 | 80.6 | 75.3 |
| YOLOv8s-CBAM | 80.7 | 64.6 | 81.6 | 75.6 |
| YOLOv8s-ECA | 81.0 | 65.1 | 82.3 | 76.1 |
| YOLOv8s-GAM | 81.0 | 67.2 | 80.9 | 76.4 |
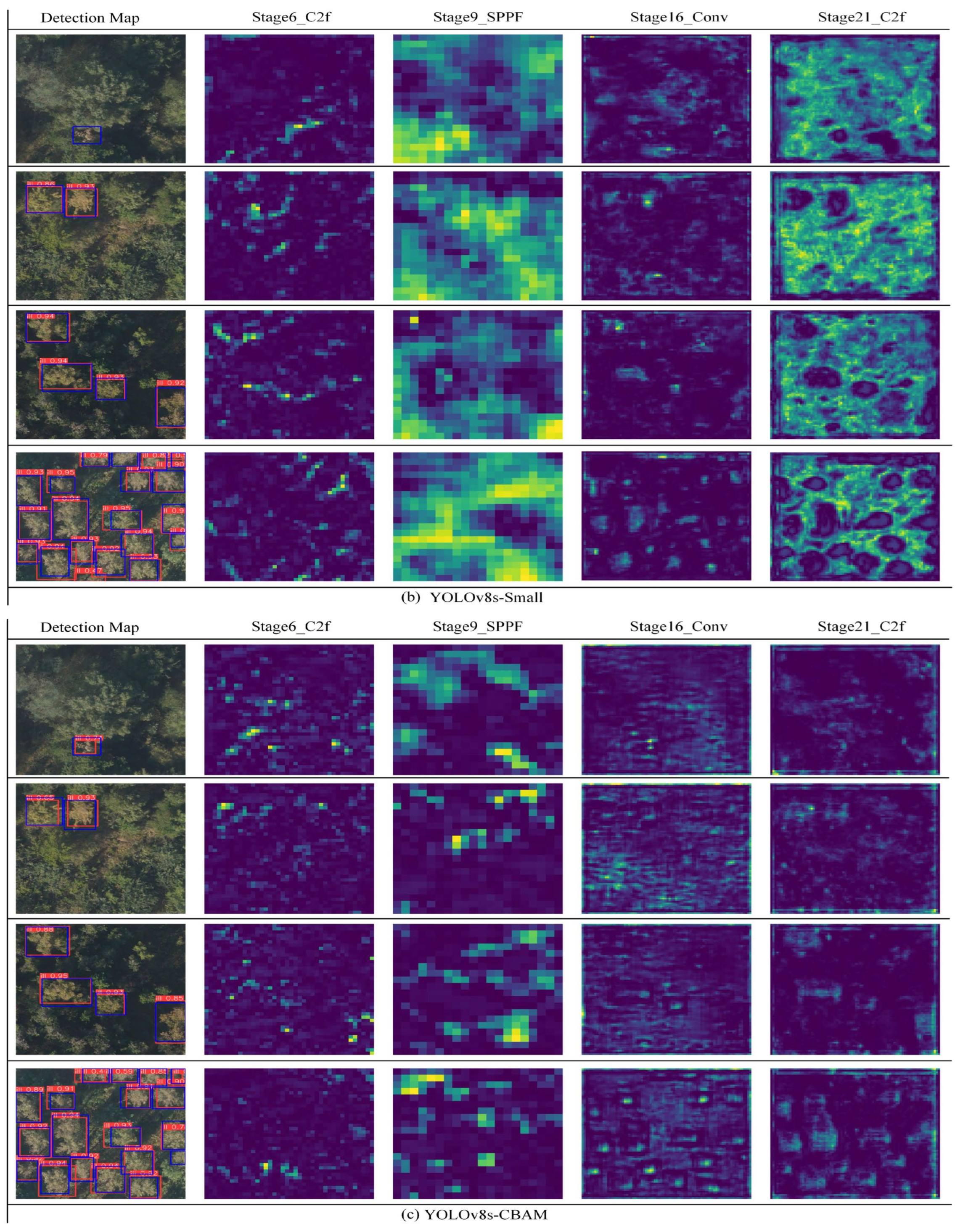
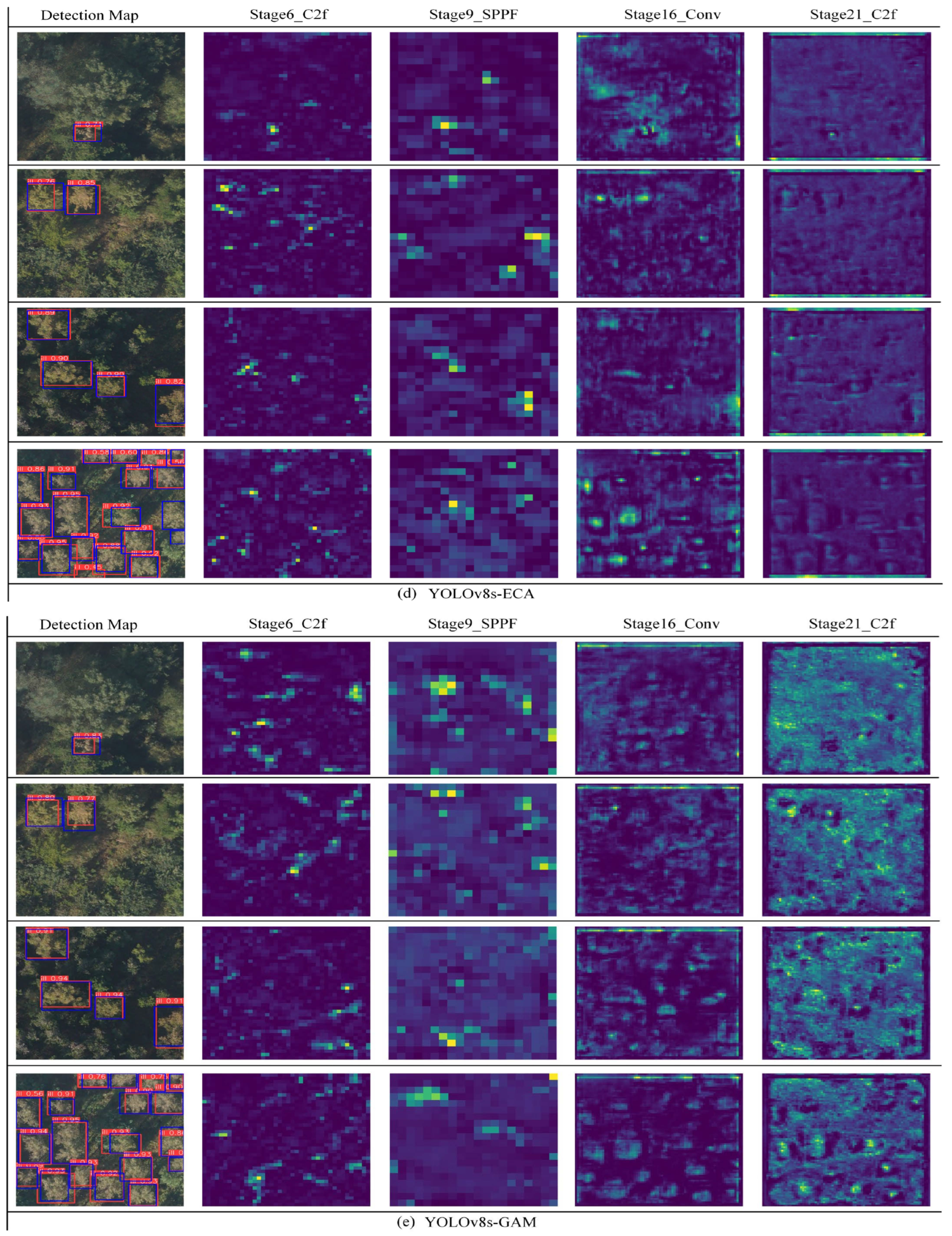
3.2. Results of Visualization of PWD
3.3. Improved YOLOv8 Framework Ablation Experiments
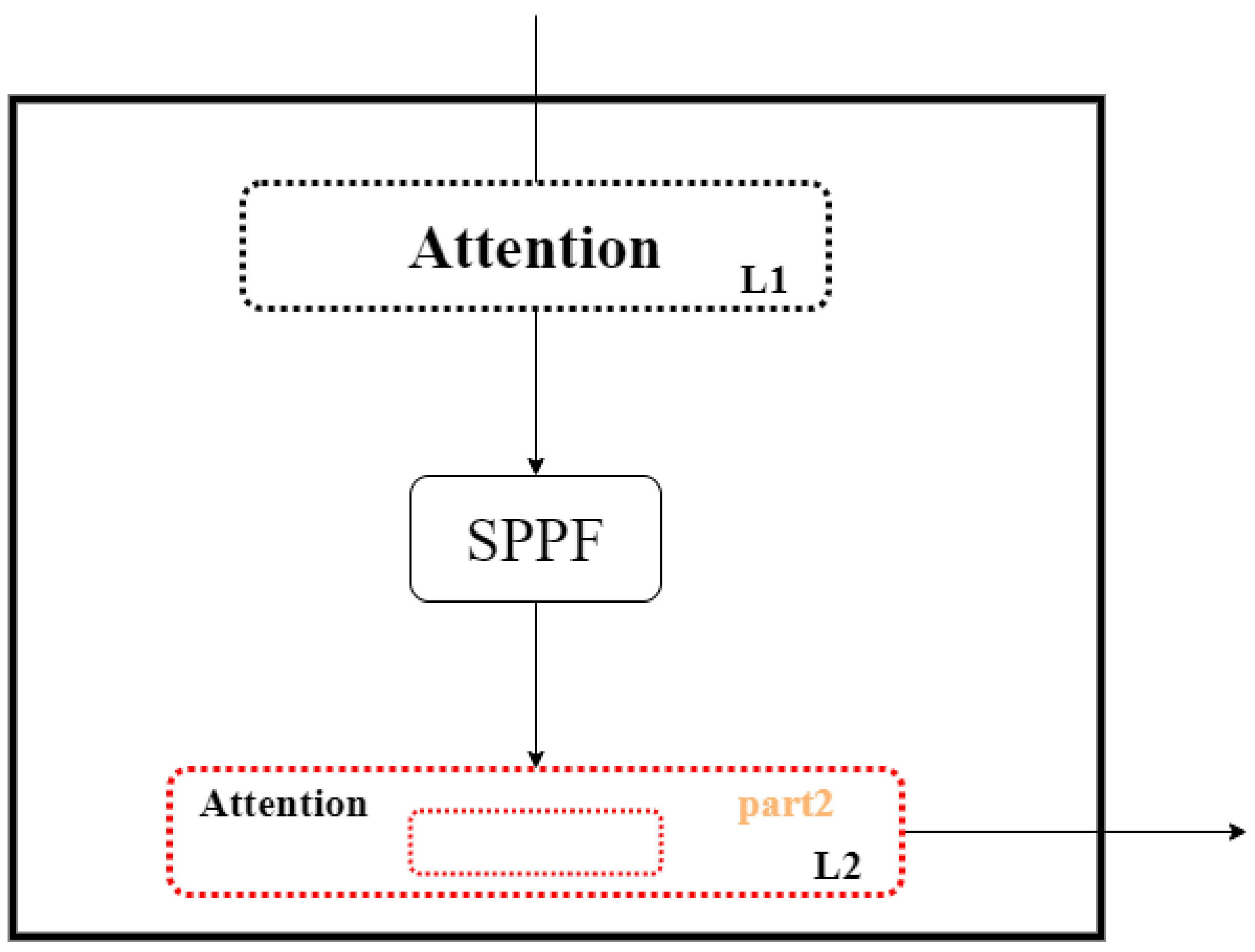
Influence of Attention Module Insertion Location on Model Precision
- (1)
- Inserting Attention Modules After the SPPF Network Layer: In this configuration, the SPPF module initially performs multi-scale pooling on the input feature map, followed by the attention module applying weighted processing to the pooled feature map. This approach allows the attention module to effectively adapt to the multi-scale features provided by the SPPF network layer, thereby enhancing the quality of feature representation.
- (2)
- Inserting Attention Modules Before the SPPF Network Layer: In this mode, the attention mechanism module first applies weighted processing to the input feature map, after which the SPPF module performs multi-scale pooling. This sequence of operations enables the SPPF module to make better use of the weight information provided by the attention module, resulting in the extraction of more distinctive multi-scale features.
4. Discussion
5. Conclusions
- This paper demonstrates the efficacy of attention mechanisms. All three attention mechanisms, namely the Convolutional Block Attention Module (CBAM), Efficient Channel Attention (ECA), and Global Attention Module (GAM), exhibit improvements in detection accuracy. Particularly, the GAM model stands out with the most significant accuracy enhancement, achieving a 4.5% improvement. Consequently, the GAM model emerges as the optimal choice, boasting an average accuracy of 76.4% on the test set.
- In this paper, we enhance model recognition accuracy by introducing a small target detection layer and an attention mechanism. First, this approach mitigates the influence of irrelevant features on model recognition to some extent. Second, the attention mechanism augments the model’s ability to select relevant features for identifying infected wood. Additionally, it leads to a reduction in the model file size, facilitating its applicability on resource-constrained devices.
- The proposed PWD framework in this study enables rapid monitoring of extensive areas. The data acquisition equipment employed, specifically the UAV and camera, offers a cost-effective solution. Furthermore, the trained network model, no longer necessitating expertise in computer science and forestry, holds the potential for replication in PWD monitoring tasks across various study areas.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A



References
- Wu, D.; Yu, L.; Yu, R.; Zhou, Q.; Li, J.; Zhang, X.; Ren, L.; Luo, Y. Detection of the Monitoring Window for Pine Wilt Disease Using Multi-Temporal UAV-Based Multispectral Imagery and Machine Learning Algorithms. Remote Sens. 2023, 15, 444. [Google Scholar] [CrossRef]
- Cai, P.; Chen, G.; Yang, H.; Li, X.; Zhu, K.; Wang, T.; Liao, P.; Han, M.; Gong, Y.; Wang, Q.; et al. Detecting Individual Plants Infected with Pine Wilt Disease Using Drones and Satellite Imagery: A Case Study in Xianning, China. Remote Sens. 2023, 15, 2671. [Google Scholar] [CrossRef]
- You, J.; Zhang, R.; Lee, J. A Deep Learning-Based Generalized System for Detecting Pine Wilt Disease Using RGB-Based UAV Images. Remote Sens. 2022, 14, 150. [Google Scholar] [CrossRef]
- Syifa, M.; Park, S.J.; Lee, C.W. Detection of the Pine Wilt Disease Tree Candidates for Drone Remote Sensing Using Artificial Intelligence Techniques. Engineering 2020, 6, 919–926. [Google Scholar] [CrossRef]
- Yu, R.; Luo, Y.; Zhou, Q.; Zhang, X.; Wu, D.; Ren, L. A Machine Learning Algorithm to Detect Pine Wilt Disease Using UAV-Based Hyperspectral Imagery and LiDAR Data at the Tree Level. Int. J. Appl. Earth Obs. Geoinf. 2021, 101, 102363. [Google Scholar] [CrossRef]
- Zhou, H.; Yuan, X.; Zhou, H.; Shen, H.; Ma, L.; Sun, L.; Fang, G.; Sun, H. Surveillance of Pine Wilt Disease by High Resolution Satellite. J. For. Res. 2022, 33, 1401–1408. [Google Scholar] [CrossRef]
- Prefecture, H. Assessment of Pine Forest Damage by Blight Based on Landsat TM Data and Correlation with Environmental Factors. Ecol. Res. 1992, 7, 9–18. [Google Scholar]
- Dennison, P.E.; Brunelle, A.R.; Carter, V.A. Assessing Canopy Mortality during a Mountain Pine Beetle Outbreak Using GeoEye-1 High Spatial Resolution Satellite Data. Remote Sens. Environ. 2010, 114, 2431–2435. [Google Scholar] [CrossRef]
- Park, J.; Sim, W.; Lee, J. Detection of Trees with Pine Wilt Disease Using Object-Based Classification Method. J. For. Environ. Sci. 2016, 32, 384–391. [Google Scholar] [CrossRef]
- Johnson, B.A.; Tateishi, R.; Hoan, N.T. A Hybrid Pansharpening Approach and Multiscale Object-Based Image Analysis for Mapping Diseased Pine and Oak Trees. Int. J. Remote Sens. 2013, 34, 6969–6982. [Google Scholar] [CrossRef]
- Arantes, B.H.T.; Moraes, V.H.; Geraldine, A.M.; Alves, T.M.; Albert, A.M.; da Silva, G.J.; Castoldi, G. Spectral Detection of Nematodes in Soybean at Flowering Growth Stage Using Unmanned Aerial Vehicles. Cienc. Rural 2021, 51, e20200283. [Google Scholar] [CrossRef]
- Wu, H. A Study of the Potential of Using Worldview-2 of Images for the Detection of Red Attack Pine Tree. In Eighth International Conference on Digital Image Processing (ICDIP 2016); SPIE: Bellingham, DC, USA, 2016; Volume 10033, pp. 1–5. [Google Scholar] [CrossRef]
- Hellesen, T.; Matikainen, L. An Object-Based Approach for Mapping Shrub and Tree Cover on Grassland Habitats by Use of LiDAR and CIR Orthoimages. Remote Sens. 2013, 5, 558–583. [Google Scholar] [CrossRef]
- Shi, Y.; Skidmore, A.K.; Wang, T.; Holzwarth, S.; Heiden, U.; Pinnel, N.; Zhu, X.; Heurich, M. Tree Species Classification Using Plant Functional Traits from LiDAR and Hyperspectral Data. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 207–219. [Google Scholar] [CrossRef]
- Guillen-Climent, M.L.; Zarco-Tejada, P.J.; Berni, J.A.J.; North, P.R.J.; Villalobos, F.J. Mapping Radiation Interception in Row-Structured Orchards Using 3D Simulation and High-Resolution Airborne Imagery Acquired from a UAV. Precis. Agric. 2012, 13, 473–500. [Google Scholar] [CrossRef]
- Zhang, C.; Kovacs, J.M. The Application of Small Unmanned Aerial Systems for Precision Agriculture: A Review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Park, Y.S.; Chung, Y.J.; Moon, Y.S. Hazard Ratings of Pine Forests to a Pine Wilt Disease at Two Spatial Scales (Individual Trees and Stands) Using Self-Organizing Map and Random Forest. Ecol. Inform. 2013, 13, 40–46. [Google Scholar] [CrossRef]
- Sun, Z.; Wang, Y.; Pan, L.; Xie, Y.; Zhang, B.; Liang, R.; Sun, Y. Pine Wilt Disease Detection in High-Resolution UAV Images Using Object-Oriented Classification. J. For. Res. 2022, 33, 1377–1389. [Google Scholar] [CrossRef]
- Natesan, S.; Armenakis, C.; Vepakomma, U. Resnet-Based Tree Species Classification Using Uav Images. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 475–481. [Google Scholar] [CrossRef]
- Pouyanfar, S.; Sadiq, S.; Yan, Y.; Tian, H.; Tao, Y.; Reyes, M.P.; Shyu, M.; Chen, S.; Iyengar, S.S. A Survey on Deep Learning: Algorithms, Techniques, and Applications. ACM Comput. Surv. 2018, 51, 5. [Google Scholar] [CrossRef]
- Qin, J.; Wang, B.; Wu, Y.; Lu, Q.; Zhu, H. Identifying Pine Wood Nematode Disease Using Uav Images and Deep Learning Algorithms. Remote Sens. 2021, 13, 162. [Google Scholar] [CrossRef]
- Girshick, R. Fast R-CNN. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef]
- Dai, J.; Li, Y.; He, K.; Sun, J. R-FCN: Object Detection via Region-Based Fully Convolutional Networks. In Proceedings of the Advances in Neural Information Processing Systems, Barcelona, Spain, 5–10 December 2016; pp. 379–387. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 779–788. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single Shot Multibox Detector. In Proceedings of the Computer Vision–ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; Volume 9905 LNCS, pp. 21–37. [Google Scholar]
- Deng, X.; Tong, Z.; Lan, Y.; Huang, Z. Detection and Location of Dead Trees with Pine Wilt Disease Based on Deep Learning and UAV Remote Sensing. AgriEngineering 2020, 2, 294–307. [Google Scholar] [CrossRef]
- Wu, B.; Liang, A.; Zhang, H.; Zhu, T.; Zou, Z.; Yang, D.; Tang, W.; Li, J.; Su, J. Application of Conventional UAV-Based High-Throughput Object Detection to the Early Diagnosis of Pine Wilt Disease by Deep Learning. For. Ecol. Manag. 2021, 486, 118986. [Google Scholar] [CrossRef]
- Yu, R.; Ren, L.; Luo, Y. Early Detection of Pine Wilt Disease in Pinus Tabuliformis in North China Using a Field Portable Spectrometer and UAV-Based Hyperspectral Imagery. For. Ecosyst. 2021, 8, 44. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention Is All You Need. In Proceedings of the Advances in Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017; Volume 2017-Decem, pp. 5999–6009. [Google Scholar]
- Carrasco, M. Visual Attention: The Past 25 Years. Vis. Res. 2011, 51, 1484–1525. [Google Scholar] [CrossRef]
- Wang, P.; Niu, T.; He, D. Tomato Young Fruits Detection Method under near Color Background Based on Improved Faster R-Cnn with Attention Mechanism. Agriculture 2021, 11, 1059. [Google Scholar] [CrossRef]
- Chen, Z.; Wu, R.; Lin, Y.; Li, C.; Chen, S.; Yuan, Z.; Chen, S.; Zou, X. Plant Disease Recognition Model Based on Improved YOLOv5. Agronomy 2022, 12, 365. [Google Scholar] [CrossRef]
- Woo, S.; Park, J.; Lee, J.; Kweon, I.S. CBAM: Convolutional Block Attention Module. In Proceedings of the European Conference on Computer Vision, Munich, Germany, 8–14 September 2018; pp. 3–19. [Google Scholar]
- Liu, Y.; Shao, Z.; Hoffmann, N. Global Attention Mechanism: Retain Information to Enhance Channel-Spatial Interactions. arXiv 2021, arXiv:2112.05561. [Google Scholar]
- Wang, Q.; Wu, B.; Zhu, P.; Li, P.; Zuo, W.; Hu, Q. ECA-Net: Efficient Channel Attention for Deep Convolutional Neural Networks. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 11531–11539. [Google Scholar]
- Zhu, C.; Chen, F.; Ahmed, U.; Shen, Z.; Savvides, M. Semantic Relation Reasoning for Shot-Stable Few-Shot Object Detection. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 8778–8787. [Google Scholar]
- Lin, Q.; Guo, J.; Yan, J.; Heng, W. Land Use and Landscape Pattern Changes of Weihai, China Based on Object-Oriented SVM Classification from Landsat MSS/TM/OLI Images. Eur. J. Remote Sens. 2018, 51, 1036–1048. [Google Scholar] [CrossRef]
- Bao, Y.; Han, A.; Zhang, J.; Liu, X.; Tong, Z.; Bao, Y. Contribution of the Synergistic Interaction between Topography and Climate Variables to Pine Caterpillar (Dendrolimus Spp.) Outbreaks in Shandong Province, China. Agric. For. Meteorol. 2022, 322, 109023. [Google Scholar] [CrossRef]
- Fraser, B.T.; Congalton, R.G. Issues in Unmanned Aerial Systems (UAS) Data Collection of Complex Forest Environments. Remote Sens. 2018, 10, 908. [Google Scholar] [CrossRef]
- Daniels, L.; Eeckhout, E.; Wieme, J.; Dejaegher, Y.; Audenaert, K.; Maes, W.H. Identifying the Optimal Radiometric Calibration Method for UAV-Based Multispectral Imaging. Remote Sens. 2023, 15, 2909. [Google Scholar] [CrossRef]
- Sun, Z.; Ibrayim, M.; Hamdulla, A. Detection of Pine Wilt Nematode from Drone Images Using UAV. Sensors 2022, 22, 4704. [Google Scholar] [CrossRef] [PubMed]
- Abdollahnejad, A.; Panagiotidis, D. Tree Species Classification and Health Status Assessment for a Mixed Broadleaf-Conifer Forest with Uas Multispectral Imaging. Remote Sens. 2020, 12, 3722. [Google Scholar] [CrossRef]








| UAV & Camera | Parameter | Value |
|---|---|---|
 | Maximum take-off mass/g | 6500 |
| UAV wingspan/m | 1.9 | |
| Maximum flight altitude/m | 3000 | |
| Maximum flight speed/(km·h−1) | 64.8 | |
| Max flight time/min | 90 | |
 | Dimensions (L × W × H)/mm | 126.9 × 95.7 × 60.3 |
| Effective pixels/mp | 42.4 | |
| Continuous speed/s | 5 frames | |
| Image Sensor | ExmorRCMOS | |
| Photo format | JPEG |
| Models | Evaluation Metrics | |||
|---|---|---|---|---|
| mAP-50 | mAP50-95 | F1-Score | Mean | |
| YOLOv8s-CBAM-before | 80.7 | 64.6 | 81.6 | 75.6 |
| YOLOv8s-CBAM-after | 79.8 | 65.2 | 80.4 | 75.1 |
| YOLOv8s-ECA-before | 81.0 | 65.1 | 82.3 | 76.1 |
| YOLOv8s-ECA-after | 79.9 | 63.5 | 81.5 | 74.9 |
| YOLOv8s-GAM-before | 81.0 | 67.2 | 80.9 | 76.4 |
| YOLOv8s-GAM-after | 77.5 | 61.6 | 81.1 | 73.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Cao, X.; Wu, M.; Yi, C.; Zhang, Z.; Fei, H.; Zheng, H.; Jiang, H.; Jiang, Y.; Zhao, X.; et al. Detection of Pine Wilt Disease Using Drone Remote Sensing Imagery and Improved YOLOv8 Algorithm: A Case Study in Weihai, China. Forests 2023, 14, 2052. https://doi.org/10.3390/f14102052
Wang S, Cao X, Wu M, Yi C, Zhang Z, Fei H, Zheng H, Jiang H, Jiang Y, Zhao X, et al. Detection of Pine Wilt Disease Using Drone Remote Sensing Imagery and Improved YOLOv8 Algorithm: A Case Study in Weihai, China. Forests. 2023; 14(10):2052. https://doi.org/10.3390/f14102052
Chicago/Turabian StyleWang, Shikuan, Xingwen Cao, Mengquan Wu, Changbo Yi, Zheng Zhang, Hang Fei, Hongwei Zheng, Haoran Jiang, Yanchun Jiang, Xianfeng Zhao, and et al. 2023. "Detection of Pine Wilt Disease Using Drone Remote Sensing Imagery and Improved YOLOv8 Algorithm: A Case Study in Weihai, China" Forests 14, no. 10: 2052. https://doi.org/10.3390/f14102052