
Estimation of Voxel-Based Above-Ground Biomass Using Airborne LiDAR Data in an Intact Tropical Rain Forest, Brunei

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
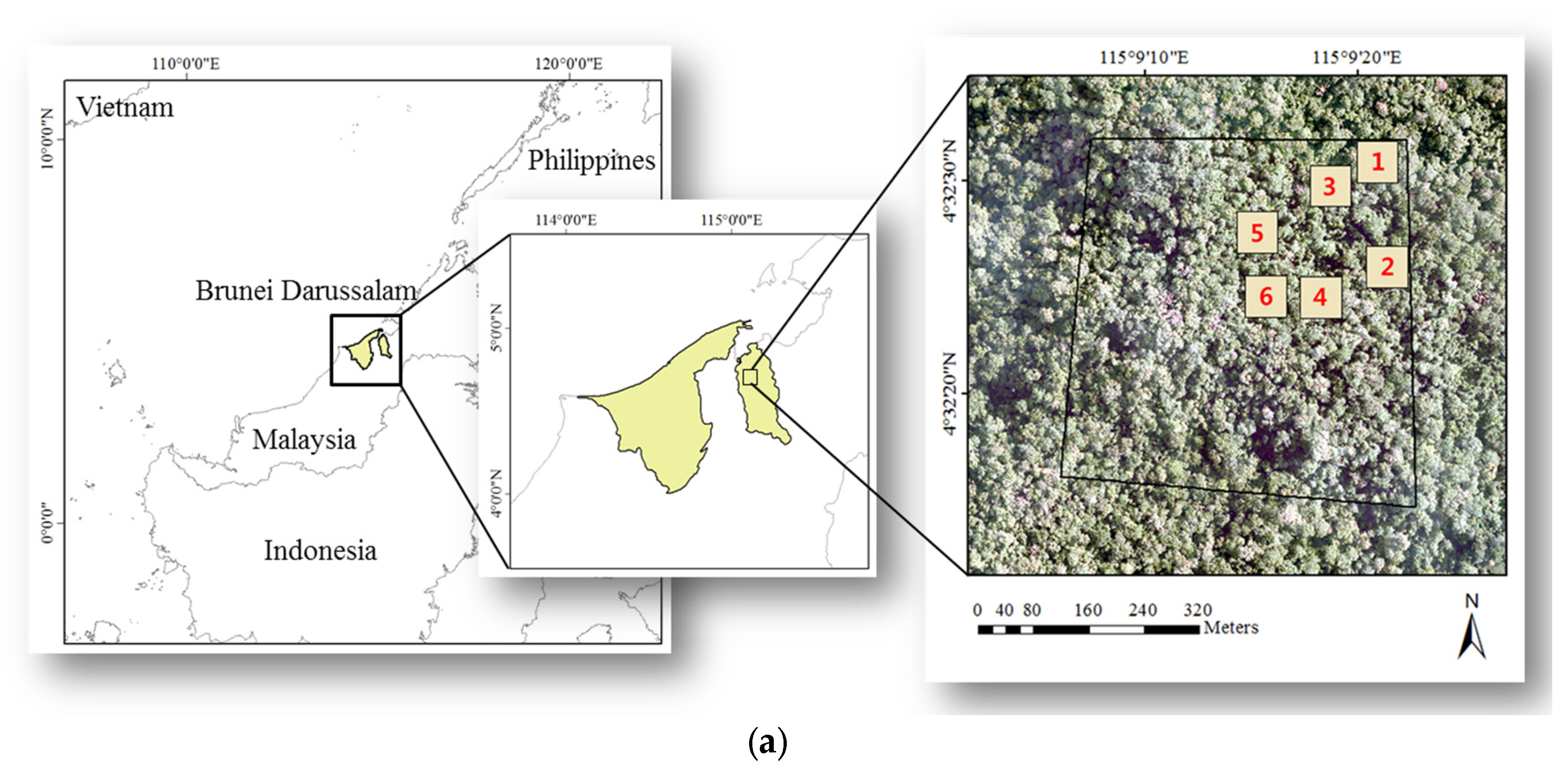
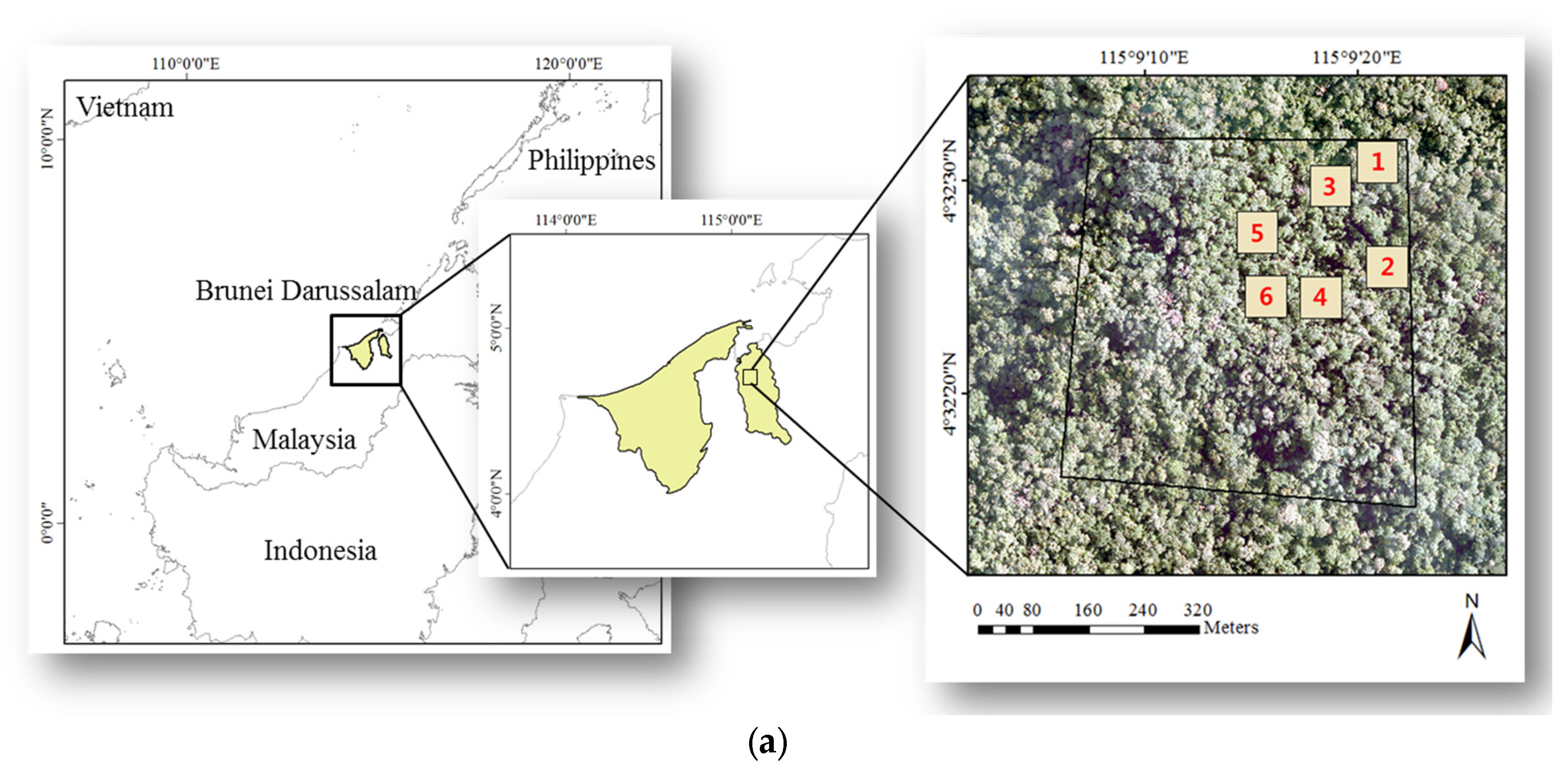
2.1. Study Area
2.2. Airborne LiDAR Data
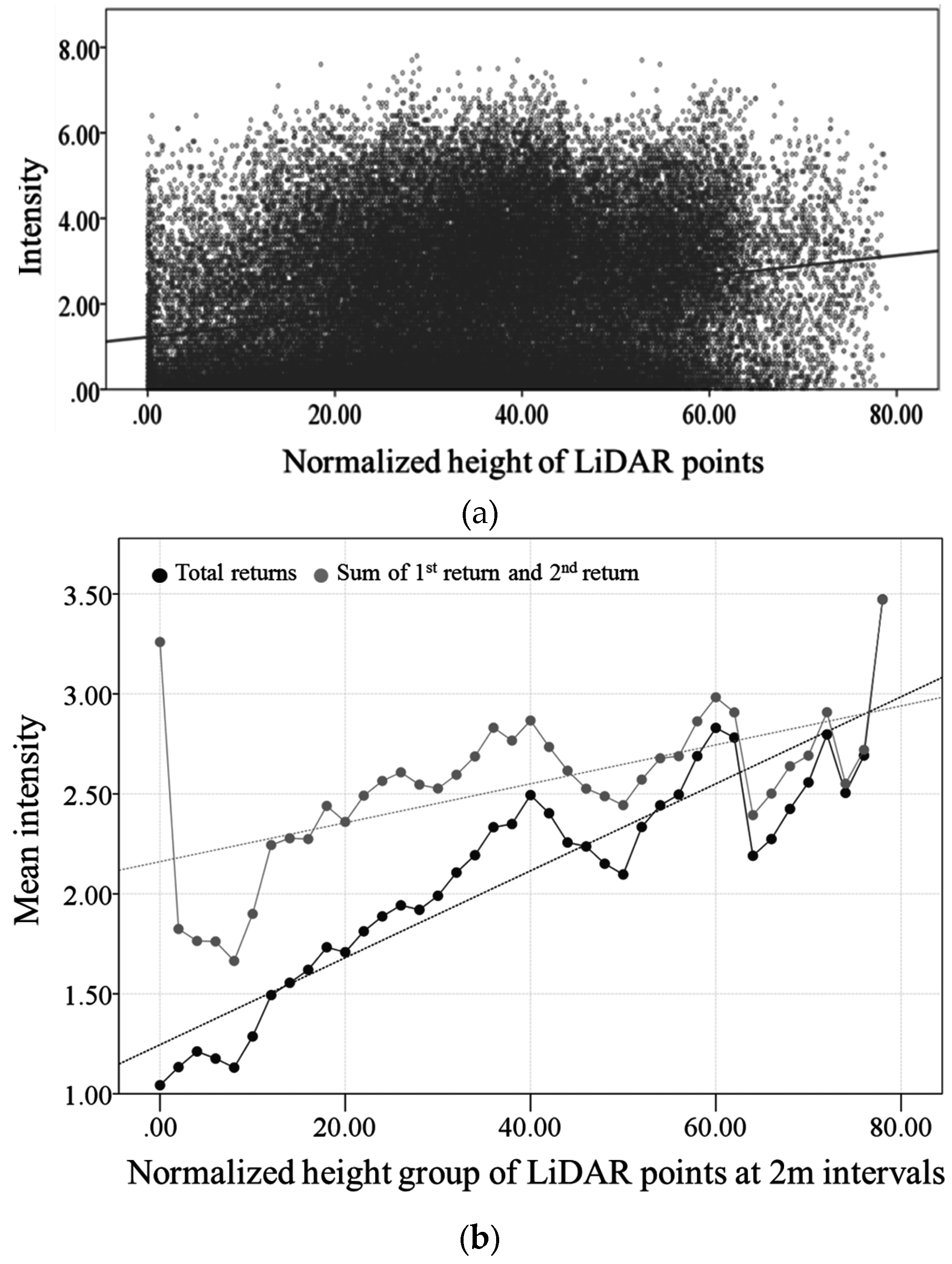
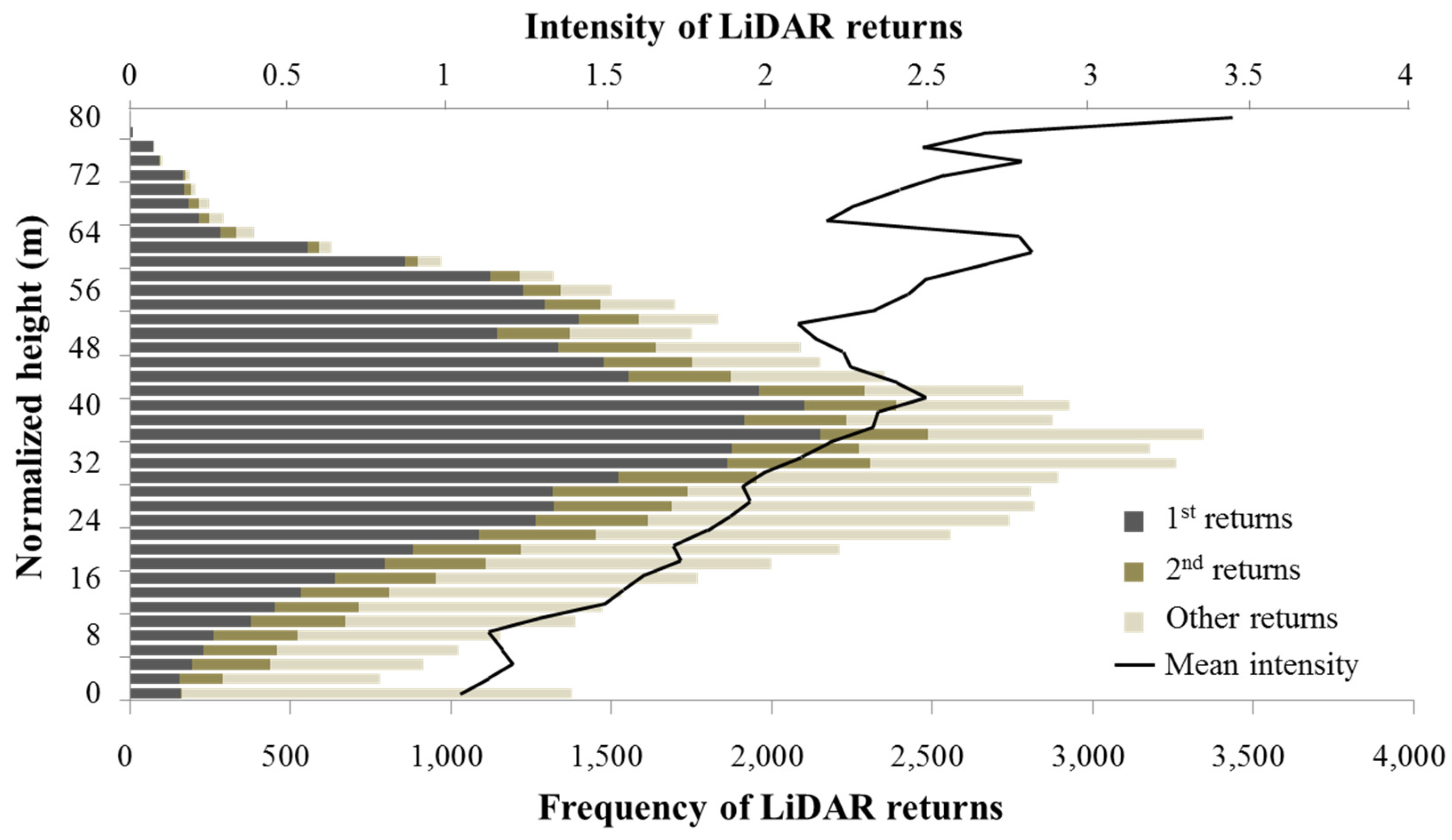
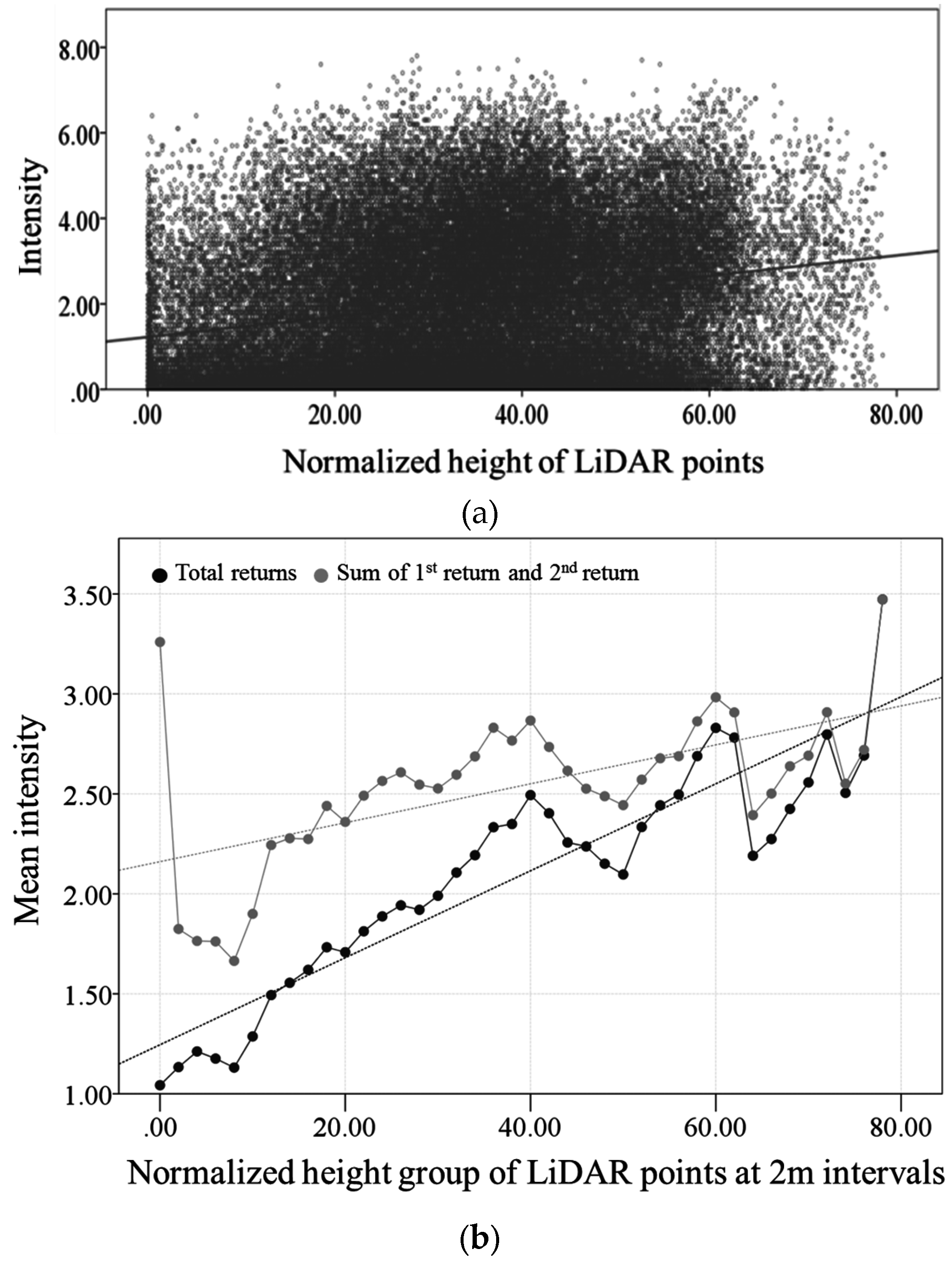
2.3. LiDAR Metrics
2.4. Point Cloud Based (PCB) LiDAR Metrics
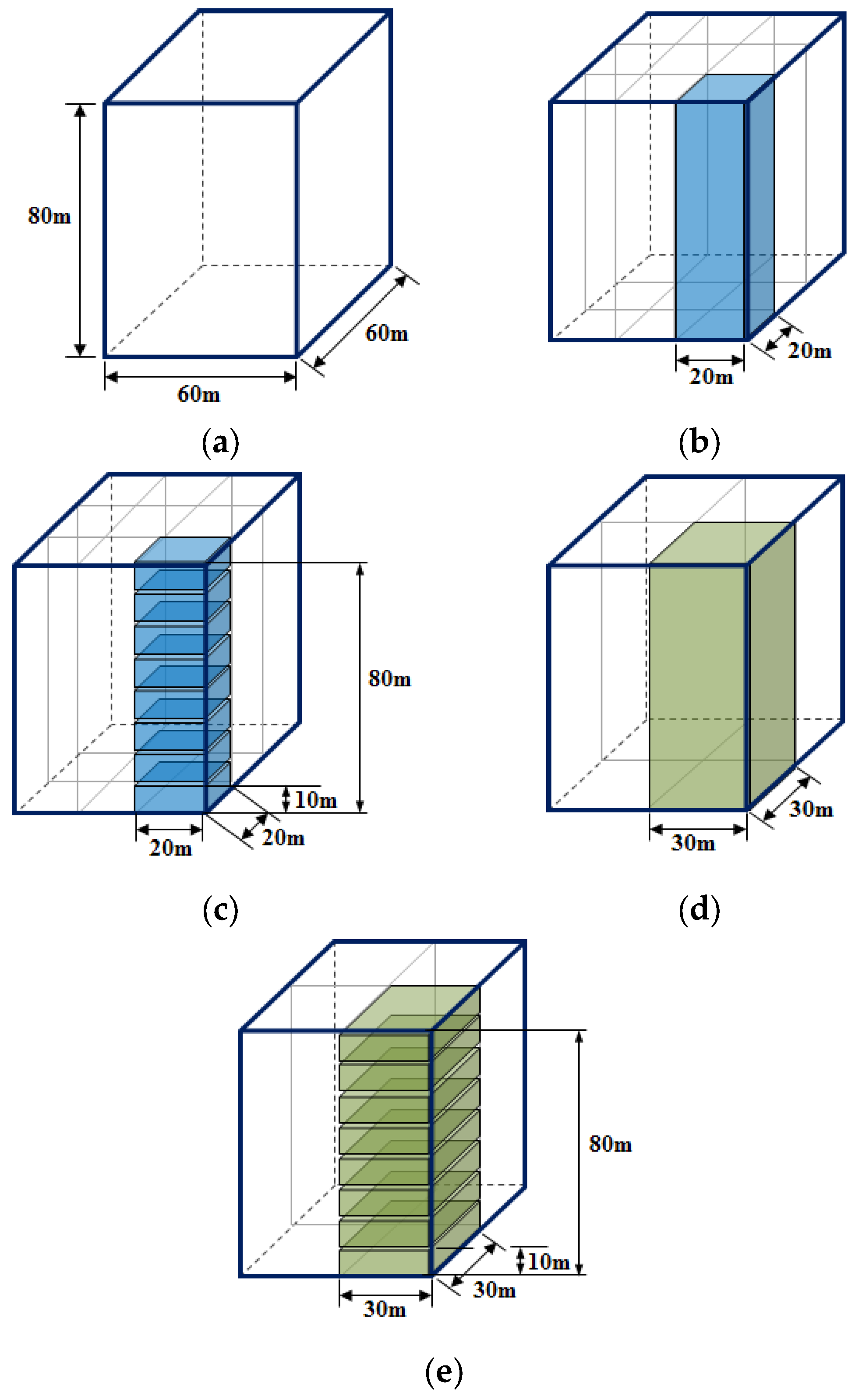
2.5. Voxel-Based (VB) Metrics
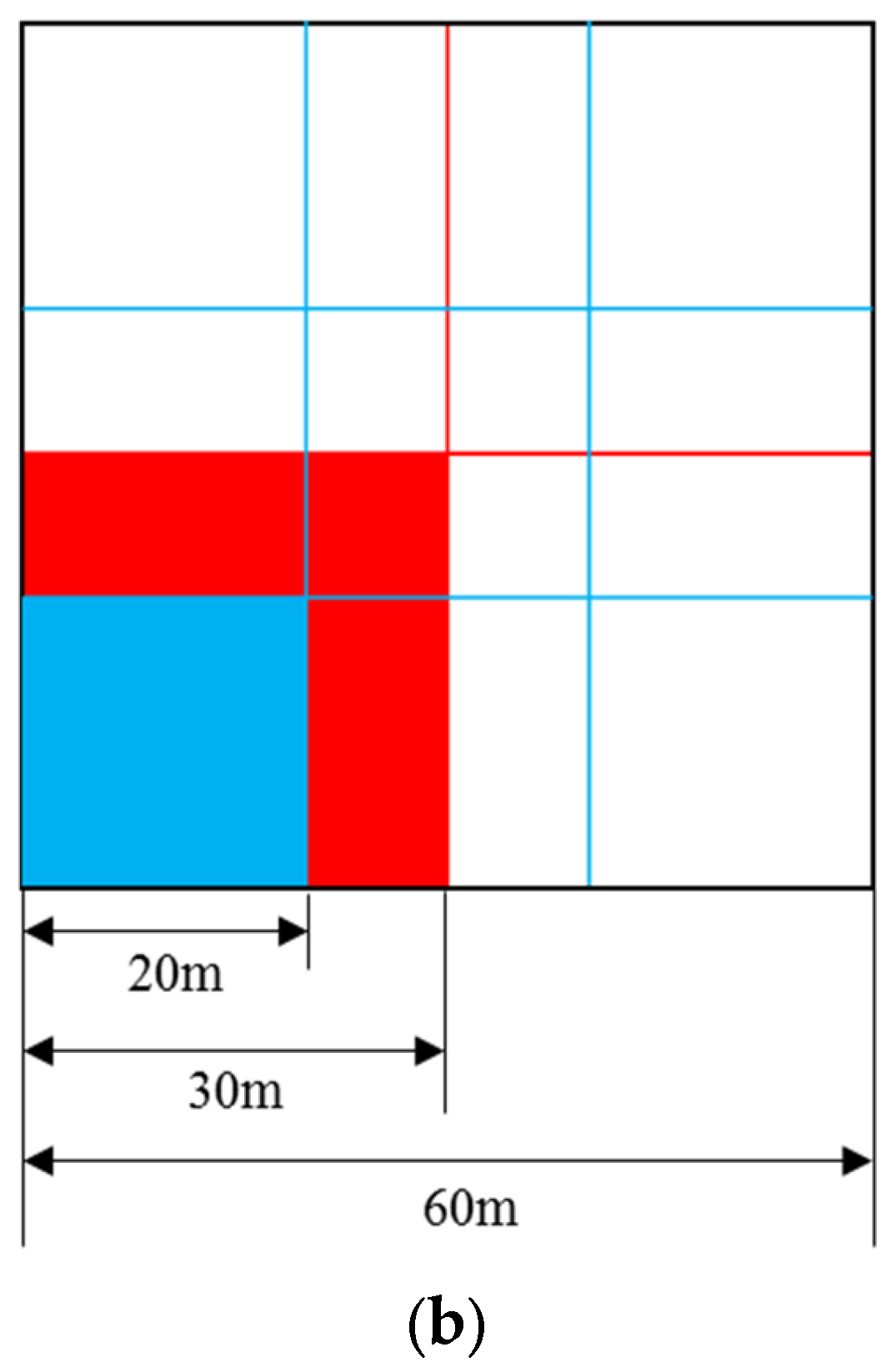
2.5.1. Extraction of LiDAR Point Cloud Data Based on the Voxel Approach
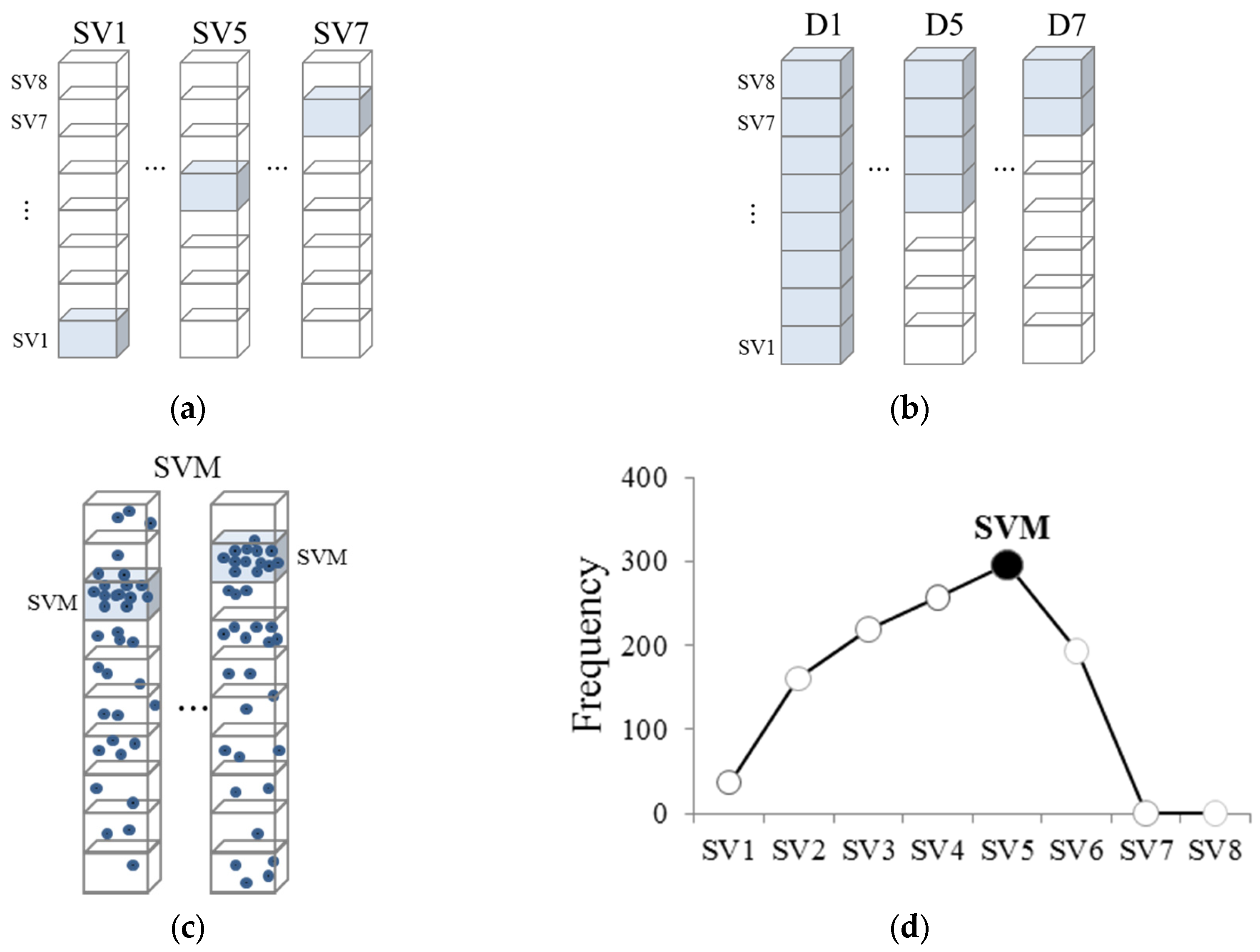
2.5.2. Concepts of Voxel-Based (VB) Metrics
2.6. Statistical Analysis
3. Results and Discussion
3.1. Development of Models for AGB Estimation
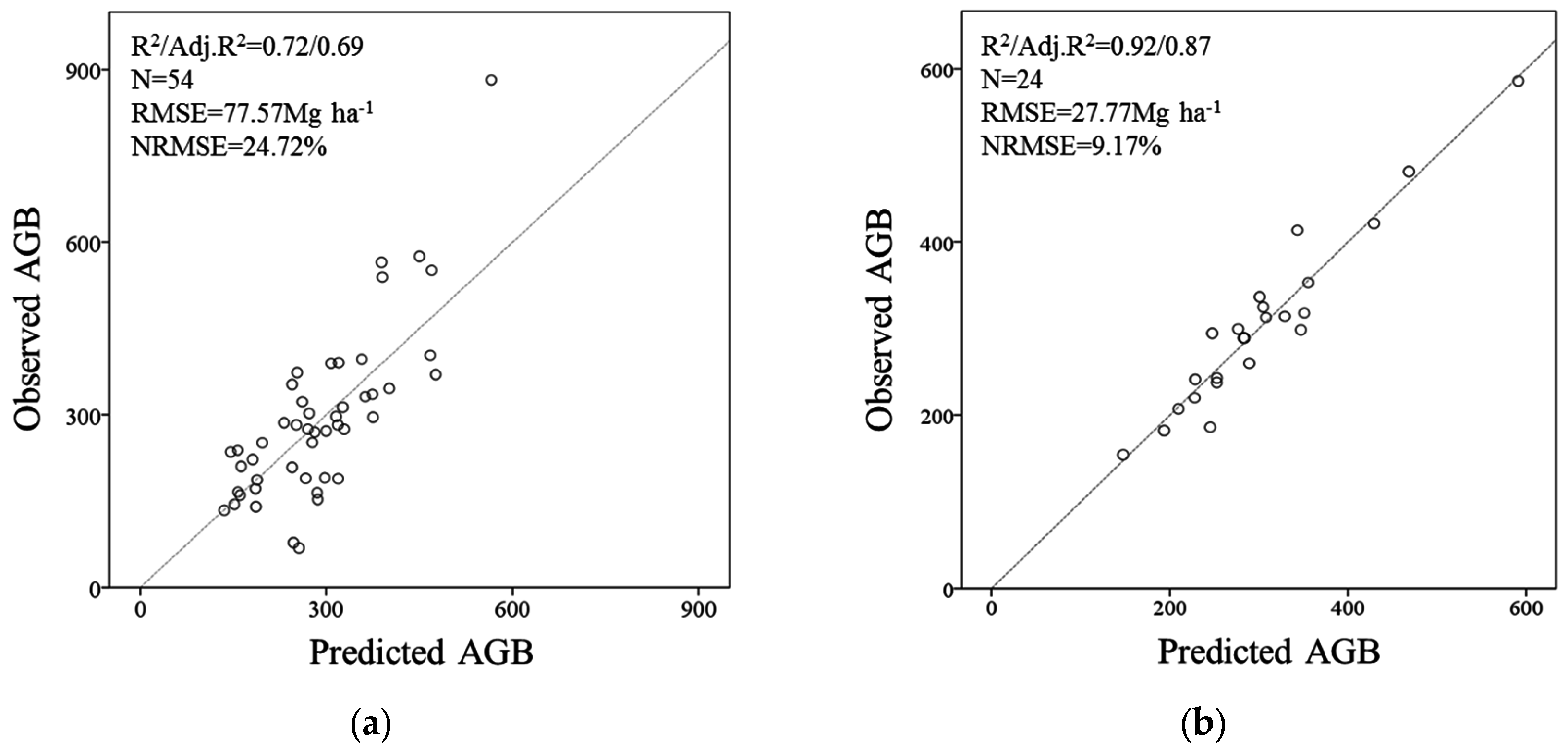
3.2. Statistical Analysis for Model Validation
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- FAO (Food and Agriculture Organization of the United Nations). Global Forest Resources Assessment 2010 Main Report; Food and Agriculture Organization of the United Nations: Rome, Italy, 2010. [Google Scholar]
- Pachauri, R.K.; Allen, M.R.; Barros, V.R.; Broome, J.; Cramer, W.; Christ, R.; Church, J.A.; Clarke, L.; Dahe, Q.; Dasgupta, P.; et al. Contribution of working groups I, II and III to the fifth assessment report of the intergovernmental panel on climate change. In Climate Change 2014: Synthesis Report; Intergovernmental Panel on Climate Change: Bonn, Germany, 2014; p. 151. [Google Scholar]
- Mauya, E.W.; Hansen, E.H.; Gobakken, T.; Bollandsås, O.M.; Malimbwi, R.E.; Næsset, E. Effects of field plot size on prediction accuracy of aboveground biomass in airborne laser scanning-assisted inventories in tropical rain forests of Tanzania. Carbon Bal. Manag. 2015, 10, 1–14. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Phua, M.H.; Hue, S.W.; Loki, K.; Hashim, M.; Bidin, K.; Musta, B.; Suleiman, M.; Yap, S.W.; Maycock, C.R. Estimating aboveground biomass of a logged-over lowland rainforest in Sabah, Malaysia using airborne LiDAR data. Terr. Atmos. Ocean Sci. 2016, in press. [Google Scholar] [CrossRef]
- Réjou-Méchain, M.; Tymen, B.; Blanc, L.; Fauset, S.; Feldpausch, T.R.; Monteagudo, A.; Phillips, O.L.; Richard, H.; Chave, J. Using repeated small-footprint LiDAR acquisitions to infer spatial and temporal variations of a high-biomass Neotropical forest. Remote Sens. Environ. 2015, 169, 93–101. [Google Scholar] [CrossRef] [Green Version]
- Huntingford, C.; Zelazowski, P.; Galbraith, D.; Mercado, L.M.; Sitch, S.; Fisher, R.; Lomas, M.; Walker, A.P.; Jones, C.D.; Booth, B.B.; et al. Simulated resilience of tropical rainforests to CO2-induced climate change. Nat. Geosci. 2013, 6, 268–273. [Google Scholar] [CrossRef]
- Gumpenberger, M.; Vohland, K.; Heyder, U.; Poulter, B.; Macey, K.; Rammig, A.; Popp, A.; Cramer, W. Predicting pan-tropical climate change induced forest stock gains and losses—Implications for REDD. Environ. Res. Lett. 2010, 5, 1–15. [Google Scholar] [CrossRef]
- Cox, P.M.; Pearson, D.; Booth, B.B.; Friedlingstein, P.; Huntingford, C.; Jones, C.D.; Luke, C.M. Sensitivity of tropical carbon to climate change constrained by carbon dioxide variability. Nature 2013, 494, 341–344. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.; Lee, D.; Yoon, T.K.; Salim, K.A.; Han, S.; Yun, H.M.; Yoon, M.; Kim, E.; Lee, W.K.; Davies, S.J.; et al. Carbon stocks and its variations with topography in an intact lowland mixed dipterocarp forest in Brunei. J. Ecol. Environ. 2015, 38, 75–84. [Google Scholar] [CrossRef]
- Kim, E.; Lee, W.K.; Yoon, M.; Lee, J.Y.; Lee, E.J.; Moon, J.Y. Detecting individual tree position and height using Airborne LiDAR data in Chollipo Arboretum, South Korea. Terr. Atmos. Ocean Sci. 2016. in Press. [Google Scholar] [CrossRef]
- Cui, G.S.; Lee, W.K.; Zhu, W.H.; Lee, J.; Kwak, H.; Choi, S.; Kwak, D.A.; Park, T. Vegetation classification and biomass estimation using IKONOS imagery in Mt. ChangBai mountain area. J. Korean For. Soc. 2012, 101, 356–364. [Google Scholar]
- Van Aardt, J.A.; Wynne, R.H.; Scrivani, J.A. Lidar-based mapping of forest volume and biomass by taxonomic group using structurally homogenous segments. Photogramm. Eng. Remote Sens. 2008, 74, 1033–1044. [Google Scholar] [CrossRef]
- Yoon, M.; Kim, E.; Kwak, D.A.; Lee, W.K.; Lee, J.Y.; Kim, M.I.; Lee, S.; Son, Y.; Salim, K.A. Estimation of stand-level above-ground biomass in intact tropical rain forests of Brunei using airborne LiDAR data. Korean J. Remote Sens. 2015, 31, 127–136. [Google Scholar] [CrossRef]
- Lang, M.W.; McCarty, G.W. LiDAR Intensity for Improved Detection of Inundation below the Forest Canopy. Wetlands 2009, 29, 1166–1178. [Google Scholar] [CrossRef]
- Ruiz, L.A.; Hermosilla, T.; Mauro, F.; Godino, M. Analysis of the influence of plot size and LiDAR density on forest structure attribute estimates. Forests 2014, 5, 936–951. [Google Scholar] [CrossRef]
- Frazer, G.W.; Magnussen, S.; Wulder, M.A.; Niemann, K.O. Simulated impact of sample plot size and co-registration error on the accuracy and uncertainty of LiDAR-derived estimates of forest stand biomass. Remote Sens. Environ. 2011, 115, 636–649. [Google Scholar] [CrossRef]
- Mascaro, J.; Detto, M.; Asner, G.P.; Muller-Landau, H.C. Evaluating uncertainty in mapping forest carbon with airborne LiDAR. Remote Sens. Environ. 2011, 115, 3770–3774. [Google Scholar] [CrossRef]
- Næsset, E.; Bollandsås, O.M.; Gobakken, T.; Gregoire, T.G.; Ståhl, G. Model-assisted estimation of change in forest biomass over an 11-year period in a sample survey supported by airborne LiDAR: A case study with post-stratification to provide ‘activity data’. Remote Sens. Environ. 2013, 128, 299–314. [Google Scholar] [CrossRef]
- Kim, E.M. Extraction of the tree regions in forest areas using LiDAR data and ortho-image. J. Korean Soc. Geospat. Inform. Syst. 2013, 21, 27–34. [Google Scholar] [CrossRef]
- Yunfei, B.; Guoping, L.; Chunxiang, C.; Xiaowen, L.; Hao, Z.; Qisheng, H.; Linyan, B.; Chaoyi, C. Classification of LIDAR point cloud and generation of DTM from LIDAR height and intensity data in forested area. Int. Arch. Photogramm. Remote Sens. Spat. Inform. Sci. 2008, 37, 313–318. [Google Scholar]
- El-Ashmawy, N.; Shaker, A. Raster vs. point cloud LiDAR data classification. Int. Arch. Photogramm. Remote Sens. Spat. Inform. Sci. 2014, 40, 79. [Google Scholar] [CrossRef]
- Hagstrom, S.T. Voxel-Based LIDAR Analysis and Applications. Ph.D. Thesis, Rochester Institute of Technology, New York, NY, USA, 2014. [Google Scholar]
- Kwak, D.A.; Cui, G.; Lee, W.K.; Cho, H.K.; Jeon, S.W.; Lee, S.H. Estimating plot volume using LiDAR height and intensity distributional parameters. Int. J. Remote Sens. 2014, 35, 4601–4629. [Google Scholar] [CrossRef]
- Yoon, M.; Kim, E.; Lee, W.K.; Kim, M.I.; Lee, S.; Son, Y.; Salim, K.A. Estimating above-ground biomass in intact tropical forest of Brunei using LiDAR data according to plot size. Adv. Space Res. 2016. submitted. [Google Scholar]
- Mutlu, M.; Popescu, S. Assessing forest fuel models using LiDAR remote sensing. In Proceedings of the ASPRS 2006 Annual Conference, Reno, NV, USA, 1–5 May 2006.
- Popescu, S.C.; Zhao, K. A voxel-based Lidar method for estimating crown base height for deciduous and pine trees. Remote Sens. Environ. 2008, 112, 767–781. [Google Scholar] [CrossRef]
- Sheridan, R.D.; Popescu, S.C.; GatSViolis, D.; Morgan, C.L.; Ku, N.W. Modeling forest aboveground biomass and volume using airborne LiDAR metrics and forest inventory and analysis data in the Pacific Northwest. Remote Sens. 2014, 7, 229–255. [Google Scholar] [CrossRef]
- Zhao, K.; Popescu, S.; Nelson, R. LiDAR remote sensing of forest biomass: A scale-invariant estimation approach using airborne lasers. Remote Sens. Environ. 2009, 113, 182–196. [Google Scholar] [CrossRef]
- Vetter, M.; Höfle, B.; Hollaus, M.; Gschöpf, C.; Mandlburger, G.; Pfeifer, N.; Wagner, W. Vertical vegetation structure analysis and hydraulic roughness determination using dense ALS point cloud data—A voxel based approach. Int. Arch. Photogramm. Remote Sens. Spat. Inform. Sci. 2011, 38, 5. [Google Scholar] [CrossRef]
- Dykes, A.P. Climatic patterns in a tropical rainforest in Brunei. Geogr. J. 2000, 166, 63–80. [Google Scholar] [CrossRef]
- Kricher, J. Tropical Ecology; Princeton University Press: Princeton, NJ, USA, 2011. [Google Scholar]
- Basuki, T.M.; Van Laake, P.E.; Skidmore, A.K.; Hussin, Y.A. Allometric equations for estimating the above-ground biomass in tropical lowland Dipterocarp forests. For. Ecol. Manag. 2009, 257, 1684–1694. [Google Scholar] [CrossRef]
- Kwak, D.A.; Lee, W.K.; Cho, H.K.; Lee, S.H.; Son, Y.; Kafatos, M.; Kim, S.R. Estimating stem volume and biomass of Pinus koraiensis using LiDAR data. J. Plant Res. 2010, 123, 421–432. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Weinacker, H.; Koch, B. A LiDAR point cloud based procedure for vertical canopy structure analysis and 3-D single tree modelling in forest. Sensors 2008, 8, 3938–3951. [Google Scholar] [CrossRef]
- Clark, M.L.; Roberts, D.A.; Ewel, J.J.; Clark, D.B. Estimation of tropical rain forest aboveground biomass with small-footprint LiDAR and hyperspectral sensors. Remote Sens. Environ. 2011, 115, 2931–2942. [Google Scholar] [CrossRef]
- García, M.; Riaño, D.; Chuvieco, E.; Danson, F.M. Estimating biomass carbon stocks for a Mediterranean forest in central Spain using LiDAR height and intensity data. Remote Sens. Environ. 2010, 114, 816–830. [Google Scholar] [CrossRef]
- Shendryk, I.; Hellström, M.; Klemedtsson, L.; Kljun, N. Low-density LiDAR and optical imagery for biomass estimation over boreal forest in Sweden. Forests 2014, 5, 992–1010. [Google Scholar] [CrossRef]
- Cao, L.; Coops, N.C.; Hermosilla, T.; Innes, J.; Dai, J.; She, G. Using small-footprint discrete and full-waveform airborne LiDAR metrics to estimate total biomass and biomass components in subtropical forests. Remote Sens. 2014, 6, 7110–7135. [Google Scholar] [CrossRef]
- Martin, M.E.; Newman, S.D.; Aber, J.D.; Congalton, R.G. Determining forest species composition using high spectral resolution remote sensing data. Remote Sens. Environ. 1998, 65, 249–254. [Google Scholar] [CrossRef]
- Fung, T.; Fung Yan Ma, H.; Siu, W.L.; Lin, H.; Gong, P. Subtropical tree recognition with hyperspectral data analysis in Hong Kong. Geocarto Int. 2001, 16, 25–34. [Google Scholar] [CrossRef]
- Van Aardt, J.A.N.; Wynne, R.H. Spectral Separability among six southern tree species. Photogramm. Eng. Remote Sens. 2001, 67, 1367–1375. [Google Scholar]
- Ørka, H.O.; Gobakken, T.; Næsset, E.; Ene, L.; Lien, V. Simultaneously acquired airborne laser scanning and multispectral imagery for individual tree species identification. Can. J. Remote Sens. 2012, 38, 125–138. [Google Scholar] [CrossRef]
- Ioki, K.; Tsuyuki, S.; Hirata, Y.; Phua, M.H.; Wong, W.V.C.; Ling, Z.Y.; Saito, H.; Takao, G. Estimating above-ground biomass of tropical rainforest of different degradation levels in Northern Borneo using airborne LiDAR. For. Ecol. Manag. 2014, 328, 335–341. [Google Scholar] [CrossRef]
- Hansen, E.H.; Gobakken, T.; Bollandsås, O.M.; Zahabu, E.; Næsset, E. Modeling aboveground biomass in dense tropical submontane rainforest using airborne laser scanner data. Remote Sens. 2015, 7, 788–807. [Google Scholar] [CrossRef] [Green Version]
- Lu, D.; Chen, Q.; Wang, G.; Moran, E.; Batistella, M.; Zhang, M.; Vaglio Laurin, G.; Saah, D. Aboveground forest biomass estimation with Landsat and LiDAR data and uncertainty analysis of the estimates. J. Forest Res. 2012, 436537, 16. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Estimator | Statistics | 20 m × 20 m Plot | 30 m × 30 m Plot |
|---|---|---|---|
| DBH (cm) | avg. | 4.6 | |
| max. | 161.5 | ||
| min. | 1.0 | ||
| standard deviaion | 7.8 | ||
| Above-ground Biomass (DBH ≥ 1 cm) (Mg∙ha−1) | avg. | 313.75 | 302.71 |
| max. | 904.63 | 585.88 | |
| min. | 77.39 | 154.12 | |
| standard deviation | 150.81 | 98.51 | |
| LiDAR Metrics | Description | |
|---|---|---|
| Point cloud based (PCB) metrics | ||
| Height | HP10, HP20, …, HP100 | Percentile height of total returns at 10 percentile intervals |
| Hmax, Hmin, Havg, Hmed | Maximum, minimum, average, and median height of total returns | |
| Hrange, Hstd | Difference of the maximum and minimum height of total returns, Standard deviation of total returns | |
| Intensity | Imax, Imin, Iavg, Imed | Maximum, minimum, average, and median intensity of total returns |
| Irange, Istd | Difference of the maximum and minimum intensity of total returns, Standard deviation of total returns | |
| Ratio | PT | LiDAR points of total returns |
| IT | Summed intensity of total returns | |
| Voxel-based (VB) metrics (i = 1, 2, …, 8) | ||
| SVi | P_SVi/P_SViF/P_SViFS | LiDAR points of total returns/1st returns/the sum of 1st and 2nd returns within each sub-voxel (SVi) a |
| FR_SVi/FR_SViF/FR_SViFS | Frequency ratio of the SVi returns/1st returns/the sum of 1st and 2nd returns over all returns | |
| I_SVimed/I_SVimed_F/I_SVimed_FS | Median intensity of total returns/1st returns/the sum of 1st and 2nd returns within each SVi | |
| Di | P_Di/P_DiF/P_DiFS | LiDAR points of total returns/1st returns/the sum of 1st and 2nd returns above their corresponding sub-voxel (Di) b |
| FR_Di/FR_DiF/FR_Di FS | Frequency ratio of the Di returns/1st returns/the sum of 1st and 2nd returns over all returns c | |
| I_Dimed/I_Dimed_F/I_Dimed_FS | Median intensity of total returns/1streturns/the sum of 1st and 2nd returns above corresponding sub-voxel (Di) b | |
| SVM | H_SVMmed/H_SVMmed_F//H_SVMmed _FS | Median height of total returns/1st returns/the sum of 1st and 2nd returns within SVM |
| H_SVM_Dmed/H_SVM_Dmed_F/H_SVM_Dmed _FS | Median height of total returns/1st returns/the sum of 1st and 2nd returns above SVM | |
| Plot Size | Variables | Estimate | Standard Error | t Value | Pr (>|t|) | VIF | |
|---|---|---|---|---|---|---|---|
| 20 m × 20 m (0.04 ha) | Intercept | 710.10 | 187.41 | 3.79 | 0.00 | ||
| VB | P_SV1 | −1.74 | 0.56 | −3.12 | 0.00 | 4.89 | |
| I_SV2med_FS | −60.19 | 27.15 | −2.22 | 0.03 | 1.86 | ||
| H_SVMmed | 9.77 | 1.55 | 6.31 | 0.00 | 1.36 | ||
| PCB | HP20 | −25.98 | 5.98 | −4.34 | 0.00 | 7.31 | |
| 30 m × 30 m (0.09 ha) | Intercept | 757.02 | 186.19 | 4.07 | 0.00 | − | |
| VB | FR_SV1 | −3048.11 | 806.61 | −3.78 | 0.00 | 4.41 | |
| I_SV3med | 110.27 | 27.34 | 4.03 | 0.00 | 4.36 | ||
| I_SV3med_FS | 52.26 | 13.25 | 3.95 | 0.00 | 1.54 | ||
| I_D8med | 94.03 | 19.18 | 4.90 | 0.00 | 2.36 | ||
| H_SVMmed | 3.06 | 0.79 | 3.87 | 0.00 | 1.70 | ||
| PCB | HP10 | −12.34 | 4.32 | −2.86 | 0.01 | 6.40 | |
| Irange | −149.38 | 41.78 | −3.58 | 0.00 | 6.66 | ||
| Istd | 232.04 | 87.58 | 2.65 | 0.02 | 2.37 | ||
| Plot size | Estimator | Average | Standard Error | Min | Max | n |
|---|---|---|---|---|---|---|
| 20 m × 20 m (0.04 ha) | Observed AGB | 313.75 | 150.81 | 77.39 | 904.63 | 54 |
| Predicted AGB | 290.85 | 98.16 | 135.23 | 565.9 | 54 | |
| 30 m × 30 m (0.09 ha) | Observed AGB | 302.71 | 98.51 | 154.12 | 585.88 | 24 |
| Predicted AGB | 302.71 | 94.33 | 147.59 | 591.17 | 24 |
| Study | Forest Biomes | Nation | Method | Average AGB a (Mg∙ha−1) | LiDAR Point Density (pts∙m−2) | R2/Adj. R2 | RMSE (Mg∙ha−1) | NRMSE% |
|---|---|---|---|---|---|---|---|---|
| This Study (2016) | Intact tropical rain forest | Brunei | VB + PCB | 302.7 b,c (DBH ≥ 1) | 1.1 | 0.92/0.87 | 27.8 | 9.2 |
| Phua et al. (2016) | Tropical rain forest | Malaysia | PCB | 358.6 (DBH ≥ 10) | 25.0 | 0.67/- c | 80.0 | 22.3 |
| Ioki et al. (2014) | Tropical rain forest | Malaysia | PCM + CHMB | 235.5 (DBH ≥ 10) | 14.9 | - c/0.81 | 61.26 | 26.0 |
| Mauya et al. (2015) | Tropical rain forest | Tanzania | PCB | 359.4 (DBH ≥ 5) | 10.6 | - d/0.74 | - c | 29.2 |
| Hansen et al. (2015) | Tropical submontane rain forest | Tanzania | PCB | 461.9 (DBH ≥ 10) | 10.0 | 0.71/- d | 158.0 | 34.4 |
| Lu et al. (2012) | Temperate rain forest | USA | PCM + CHMB | 239.1 (DBH ≥ 5) | 2.0 | 0.76/- d | 82.1 | 34.3 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, E.; Lee, W.-K.; Yoon, M.; Lee, J.-Y.; Son, Y.; Abu Salim, K. Estimation of Voxel-Based Above-Ground Biomass Using Airborne LiDAR Data in an Intact Tropical Rain Forest, Brunei. Forests 2016, 7, 259. https://doi.org/10.3390/f7110259
Kim E, Lee W-K, Yoon M, Lee J-Y, Son Y, Abu Salim K. Estimation of Voxel-Based Above-Ground Biomass Using Airborne LiDAR Data in an Intact Tropical Rain Forest, Brunei. Forests. 2016; 7(11):259. https://doi.org/10.3390/f7110259
Chicago/Turabian StyleKim, Eunji, Woo-Kyun Lee, Mihae Yoon, Jong-Yeol Lee, Yowhan Son, and Kamariah Abu Salim. 2016. "Estimation of Voxel-Based Above-Ground Biomass Using Airborne LiDAR Data in an Intact Tropical Rain Forest, Brunei" Forests 7, no. 11: 259. https://doi.org/10.3390/f7110259