Characterizing Rigging Crew Proximity to Hazards on Cable Logging Operations Using GNSS-RF: Effect of GNSS Positioning Error on Worker Safety Status



Abstract
:1. Introduction
2. Materials and Methods
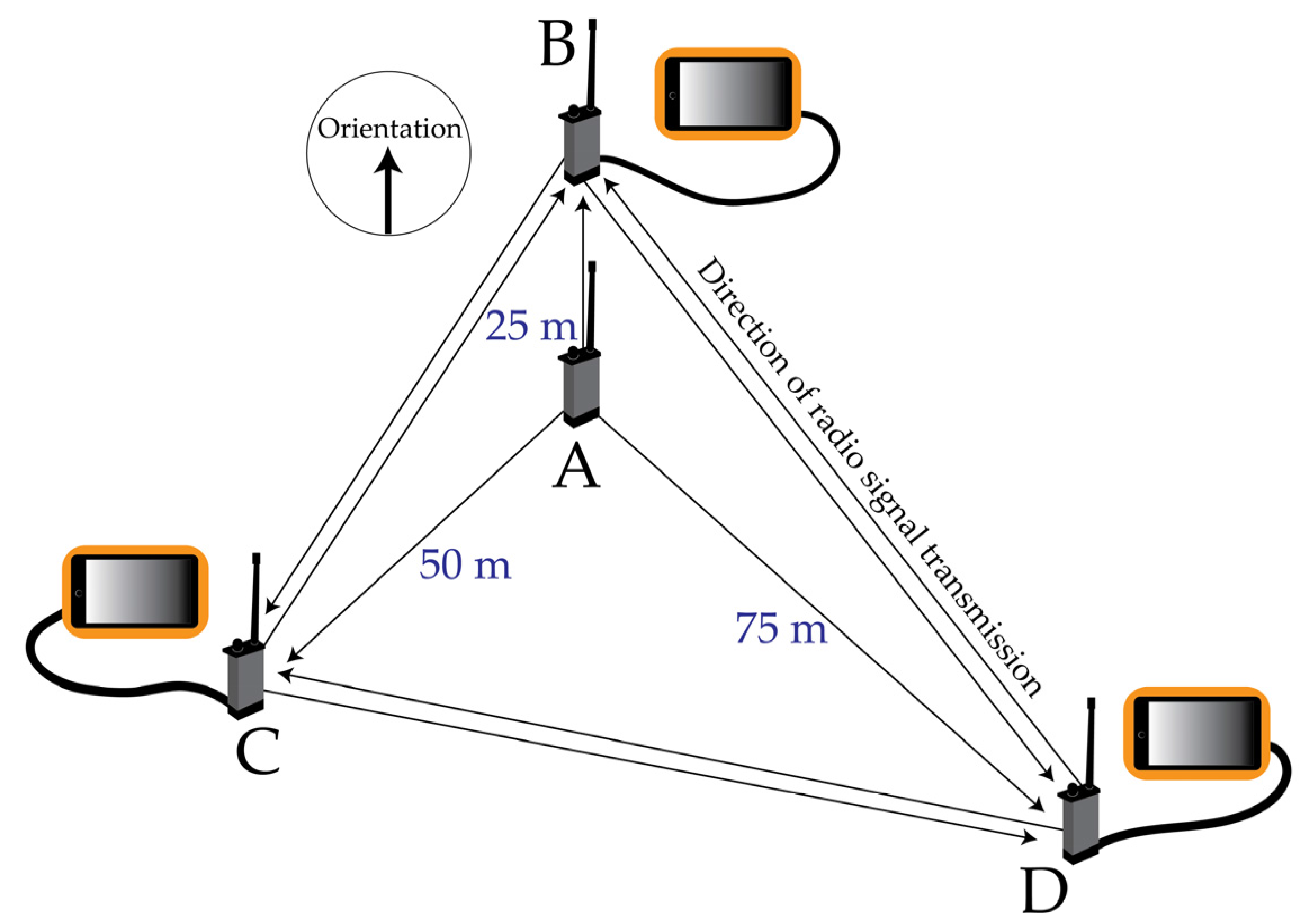
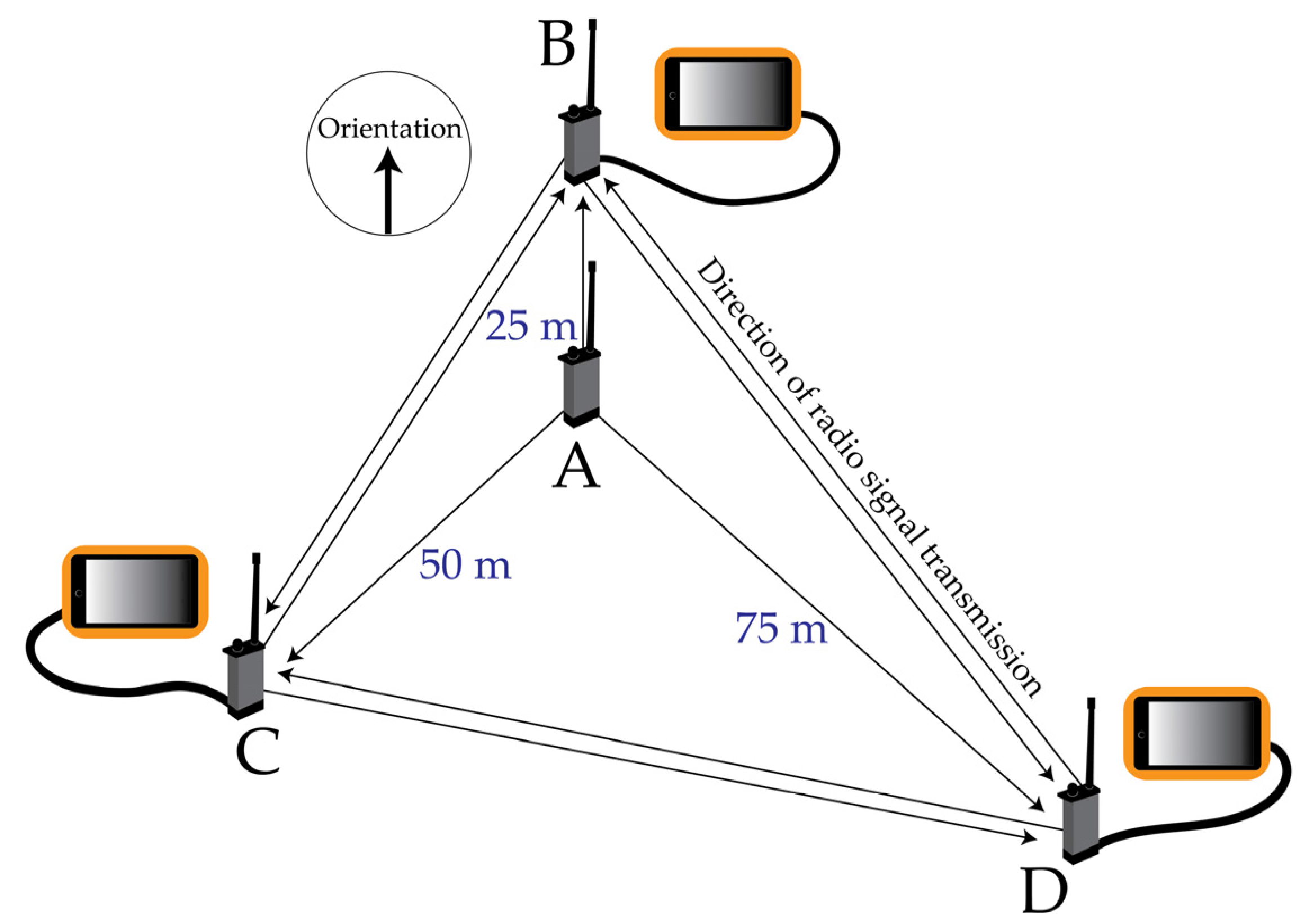
2.1. Controlled Experiment
2.1.1. Data Collection
2.1.2. Estimation of Error
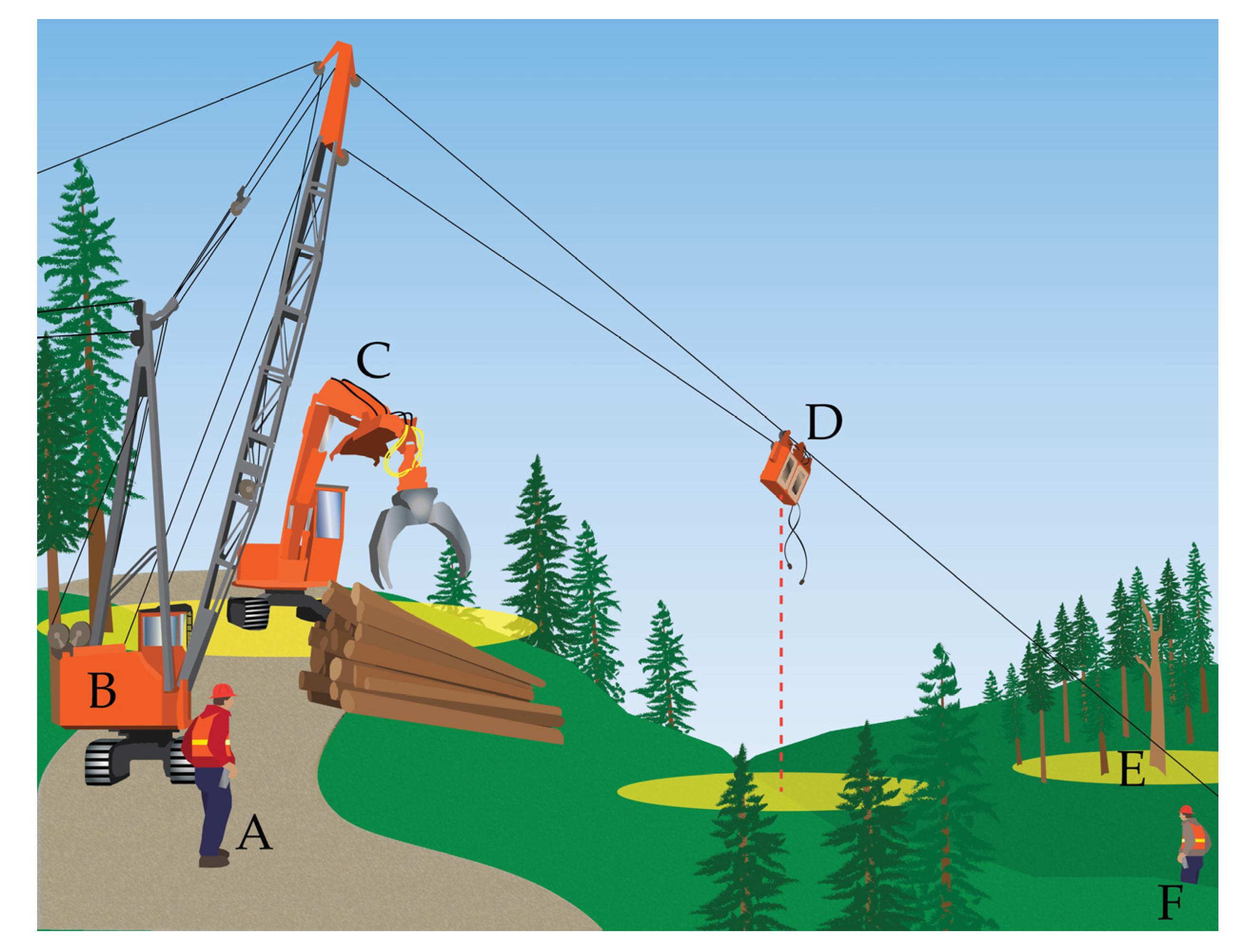
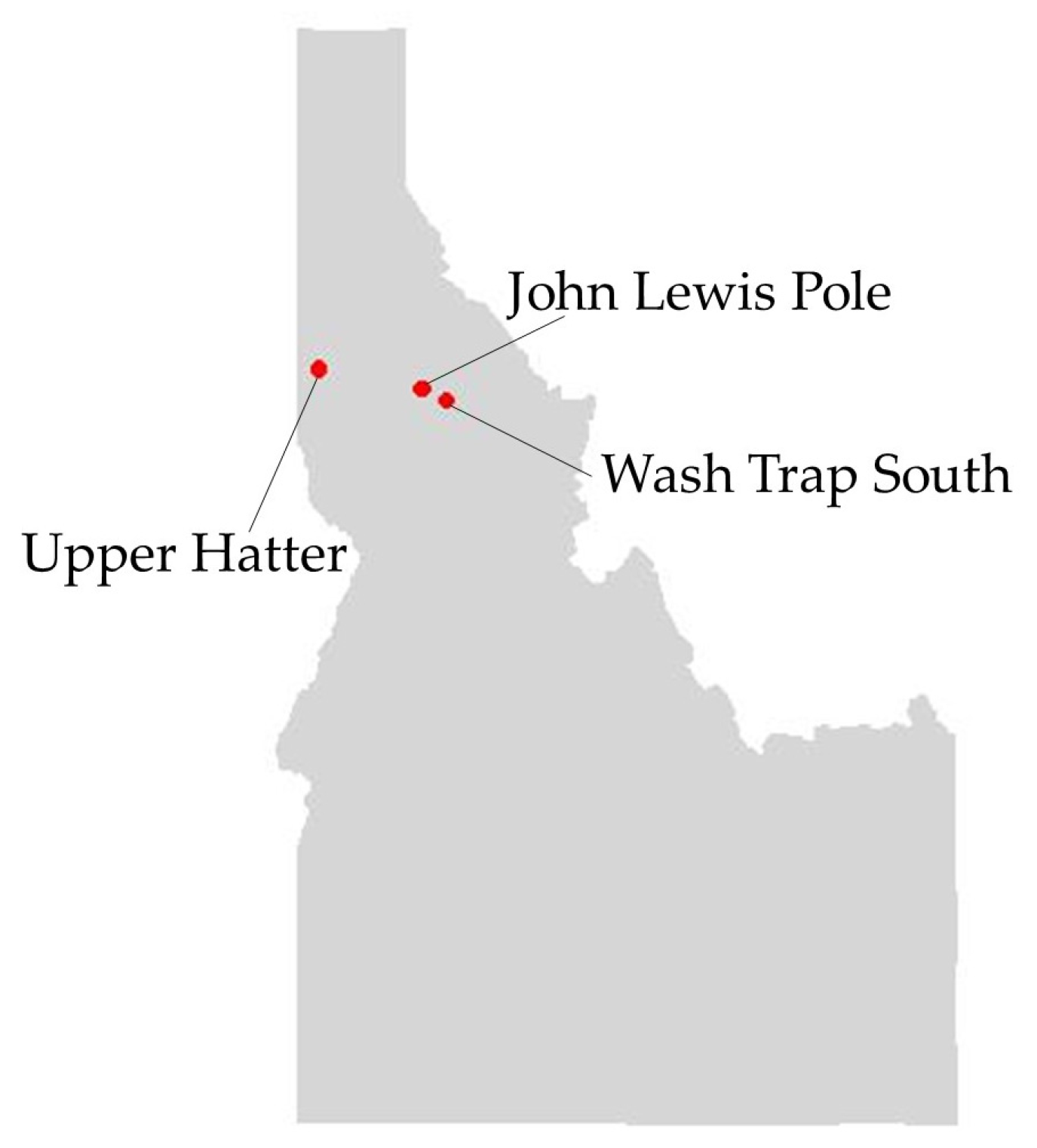
2.2. Operational Sampling
2.2.1. Data Collection
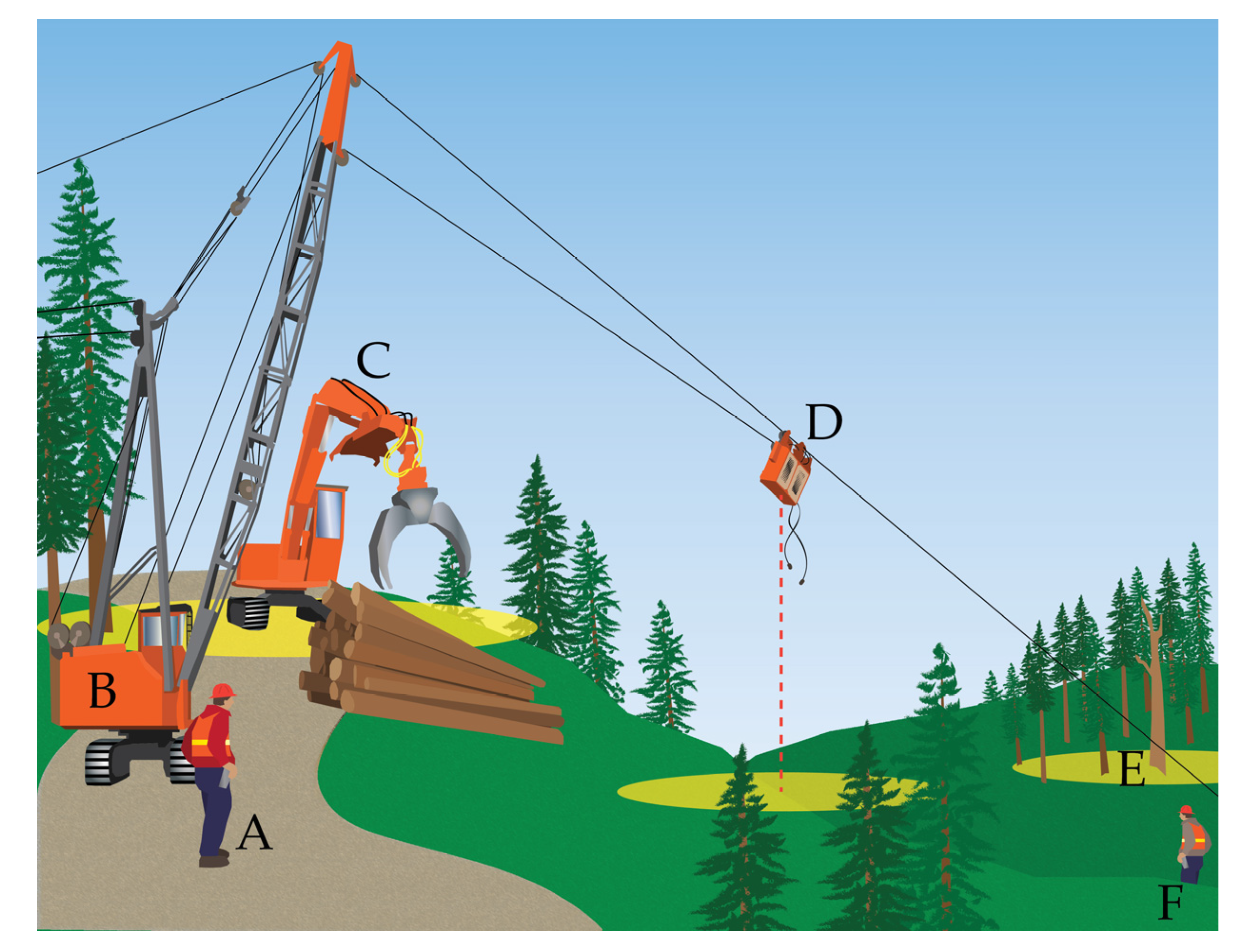
2.2.2. Summarizing Worker Proximity to Hazards
2.2.3. Simulation of GNSS Error
3. Results
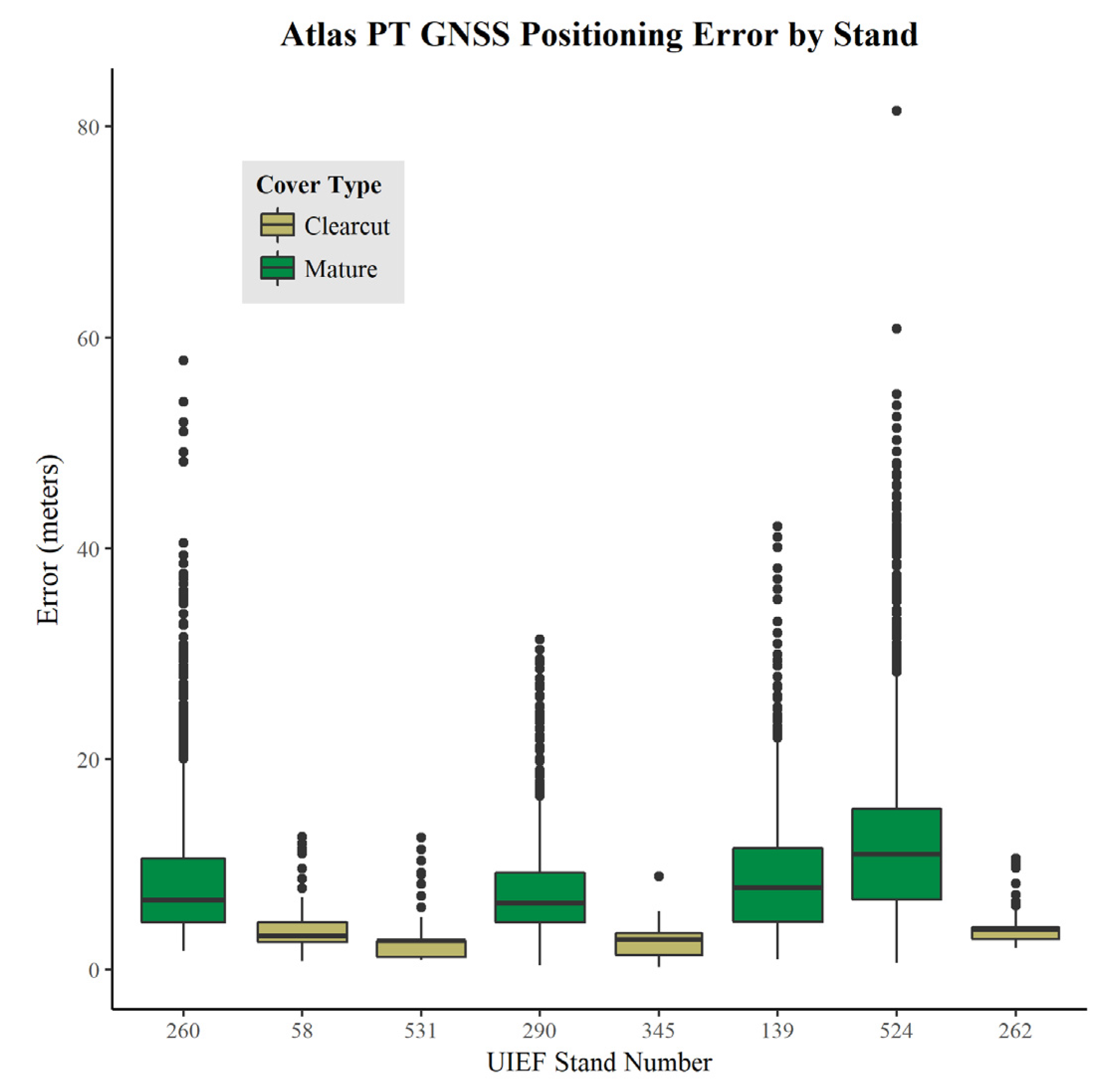
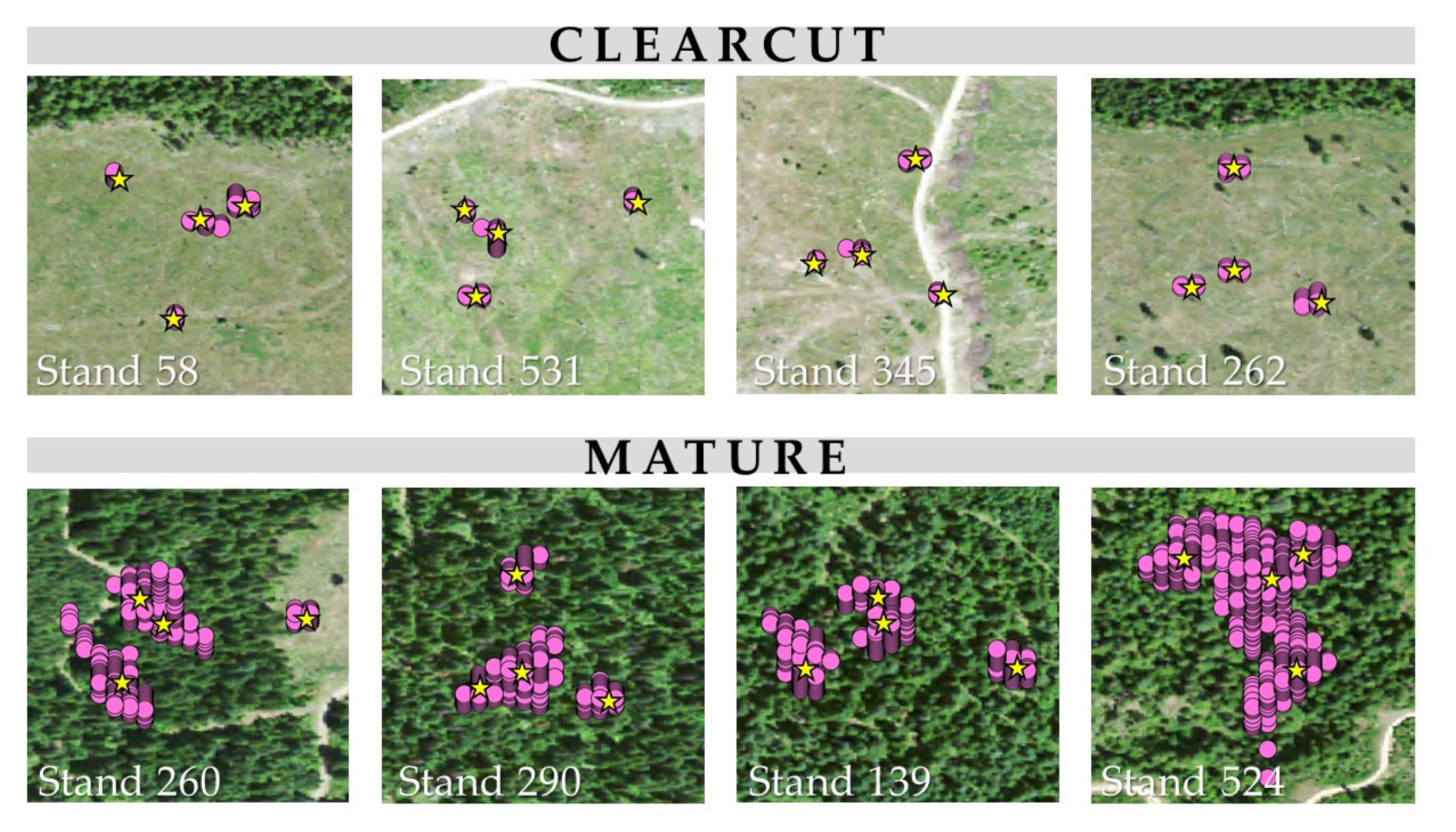
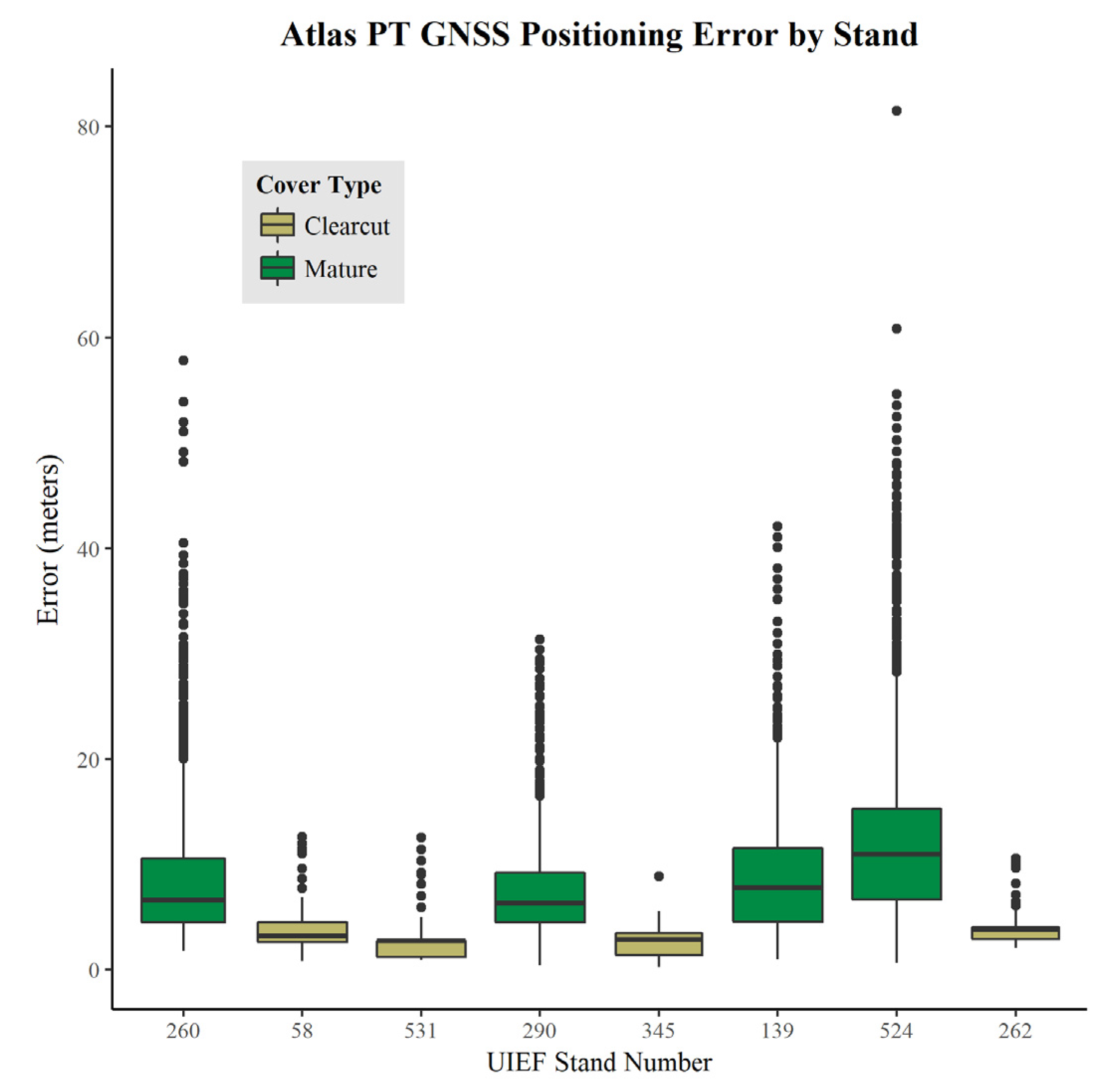
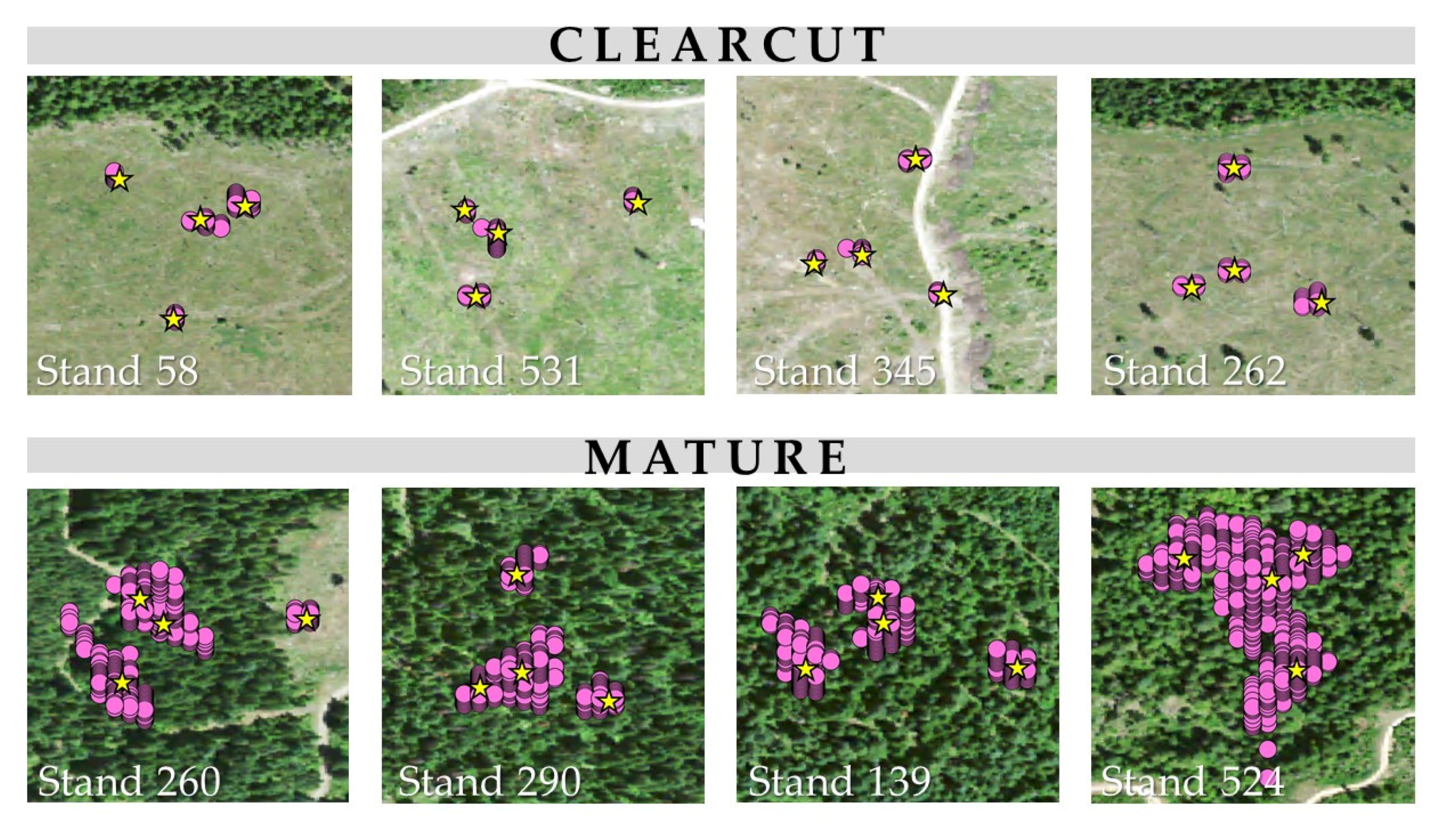
3.1. Controlled Experiment: Estimating Atlas PT Positioning Error
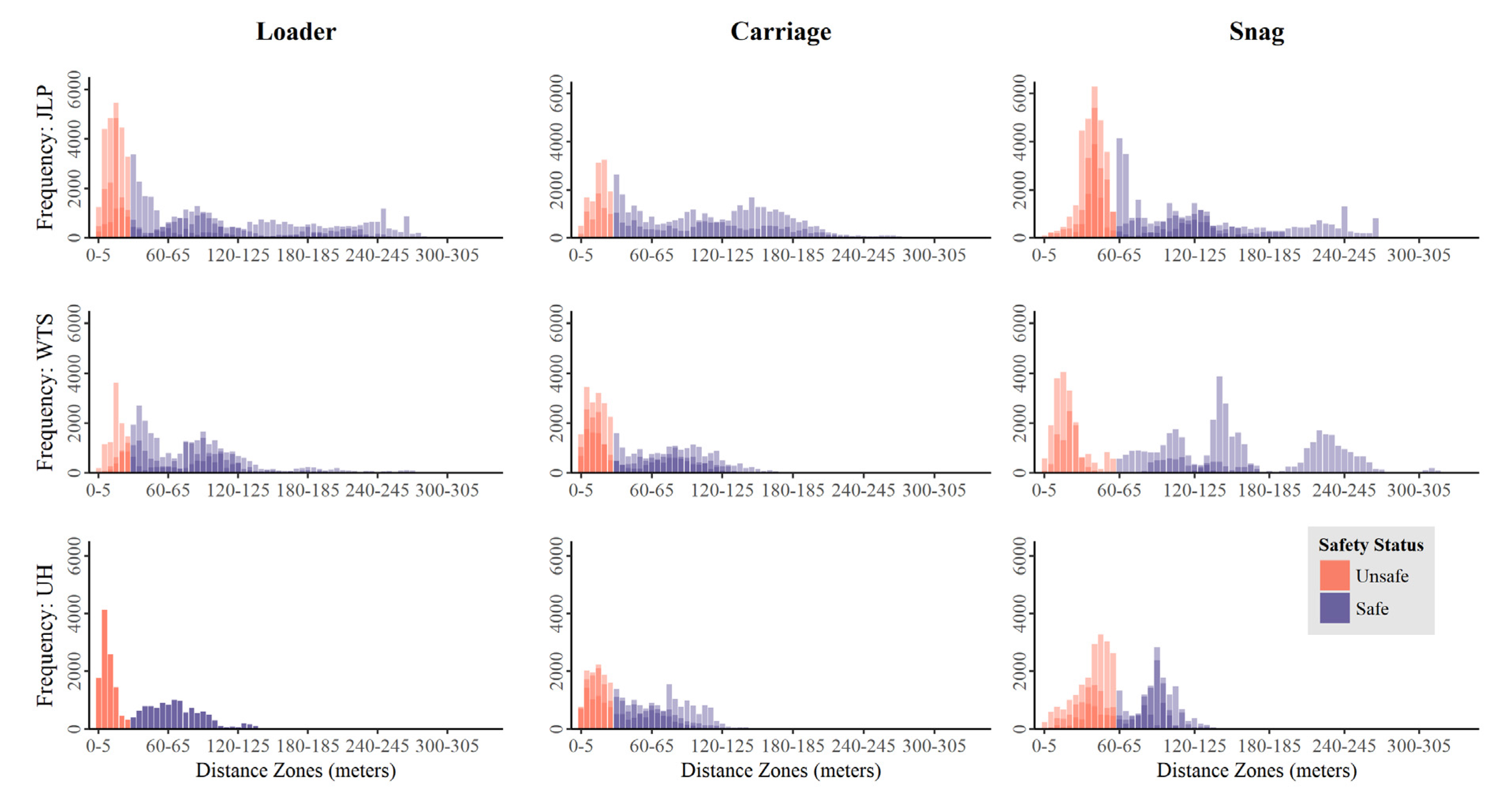
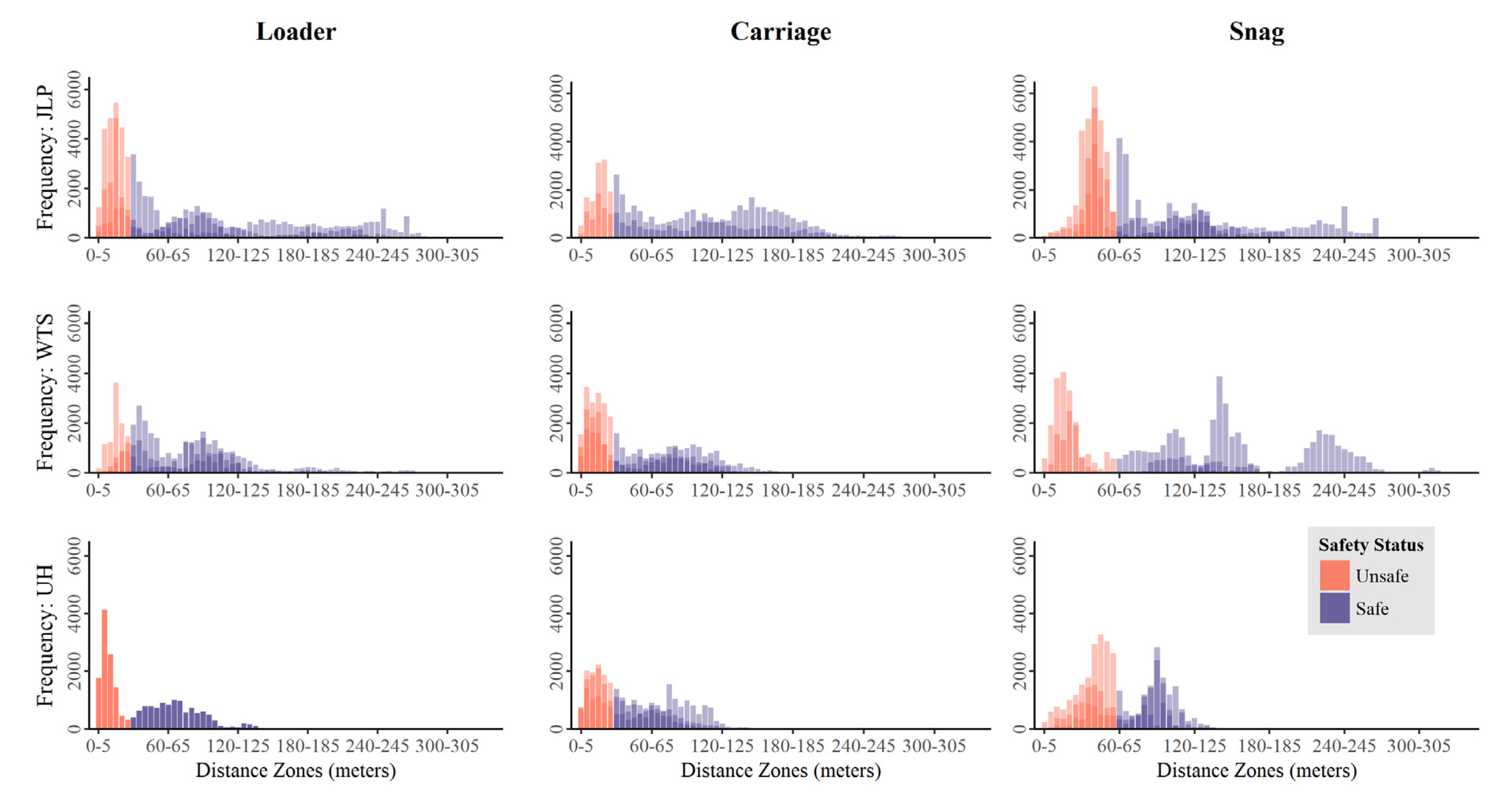
3.2. Operational Sampling: Summarizing Worker Positional Relationships to Hazards
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bell, J.L.; Helmkamp, J.C. Non-fatal injuries in the West Virginia logging industry: Using workers’ compensation claims to assess risk from 1995 through 2001. Am. J. Ind. Med. 2003, 44, 502–509. [Google Scholar] [CrossRef] [PubMed]
- Bordas, R.M.; Davis, G.A.; Hopkins, B.L.; Thomas, R.E.; Rummer, R.B. Documentation of hazards and safety perceptions for mechanized logging operations in East Central Alabama. J. Agric. Saf. Health 2001, 7, 113–123. [Google Scholar] [CrossRef] [PubMed]
- Lefort, A.J.; Pine, J.C.; Marx, B.D. Characteristics of injuries in the logging industry of Louisiana, USA: 1986–1998. Int. J. For. Eng. 2003, 14, 75–89. [Google Scholar]
- Shaffer, R.M.; Milburn, J.S. Injuries on feller-buncher/grapple skidder logging operations in the Southeastern United States. For. Prod. J. 1999, 49, 24–26. [Google Scholar]
- Sygnatur, E.F. Logging is Perilous Work. Compens. Work. Cond. 1998, 3, 1–7. [Google Scholar]
- Occupational Safety and Health Administration. Regulations (Standards-29 CFR), 1910.266 2014. Available online: http://www.osha.gov/pls/oshaweb/owadisp.show_document?p_table=STANDARDS&p_id=9862 (accessed on 3 May 2017).
- Bureau of Labor Statistics 2015 Census of Fatal Occupational Injuries. Available online: https://www.bls.gov/iif/oshwc/cfoi/cfch0014.pdf (accessed on 25 April 2017).
- Bureau of Labor Statistics 2014 Census of Fatal Occupational Injuries. Available online: www.bls.gov/iif/oshwc/cfoi/cfch0013.pdf (accessed on 17 October 2016).
- Bureau of Labor Statistics Occupational Injuries/Illnesses and Fatal Injuries Profiles. Available online: https://data.bls.gov/gqt/InitialPage (accessed on 24 April 2017).
- Keefe, R.F.; Eitel, J.U.H.; Smith, A.M.S.; Tinkham, W.T. Applications of multi-transmitter GPS-VHF in forest operations. In Proceedings of the 47th International Symposium on Forestry Mechanization and 5th International Forest Engineering Conference, Gerardmer, France, 23–26 September 2014. [Google Scholar]
- Grayson, L.M.; Keefe, R.F.; Tinkham, W.T.; Eitel, J.U.H.; Saralecos, J.D.; Smith, A.M.S.; Zimbelman, E.G. Accuracy of WAAS-enabled GPS-RF warning signals when crossing a terrestrial geofence. Sensors 2016, 16, 912. [Google Scholar] [CrossRef] [PubMed]
- Zimbelman, E.G.; Keefe, R.F.; Strand, E.K.; Kolden, C.A.; Wempe, A.M. Hazards in motion: Development of mobile geofences for use in logging safety. Sensors 2017, 17, 822. [Google Scholar] [CrossRef] [PubMed]
- Bettinger, P.; Wing, M.G. Geographic Information Systems: Applications in Forestry and Natural Resource Management; McGraw-Hill, Higher Education: New York, NY, USA, 2004; p. 230. ISBN 0072562420. [Google Scholar]
- Carter, E.A.; McDonald, T.P.; Torbert, J.L. Application of GPS technology to monitor traffic intensity and soil impacts in a forest harvest operation. In Proceedings of the Tenth Biennial Southern Silvicultural Research Conference, Shreveport, LA, USA, 16–18 February 1999. [Google Scholar]
- Taylor, S.E.; McDonald, T.P.; Veal, M.W.; Grift, T.E. Using GPS to evaluate productivity and performance of forest machine systems. In Proceedings of the First International Precision Forestry Symposium, Seattle, WA, USA, 17–20 June 2001. [Google Scholar]
- Becker, R.M.; Keefe, R.K.; Anderson, N.M. Use of real-time GNSS-RF data to characterize the swing movements of forestry equipment. Forests 2017, 8, 44. [Google Scholar] [CrossRef]
- McDonald, T.P.; Fulton, J.P. Automated time study of skidders using global positioning system data. Comput. Electron. Agric. 2005, 48, 19–37. [Google Scholar] [CrossRef]
- Strandgard, M.; Mitchell, R. Automated time study of forwarders using GPS and a vibration sensor. Croat. J. For. Eng. J. Theory Appl. For. Eng. 2015, 36, 175–184. [Google Scholar]
- Kaartinen, H.; Hyyppä, J.; Vastaranta, M.; Kukko, A.; Jaakkola, A.; Yu, X.; Pyörälä, J.; Liang, X.; Liu, J.; Wang, Y.; et al. Accuracy of kinematic positioning using Global Satellite Navigation Systems under forest canopies. Forests 2015, 6, 3218–3236. [Google Scholar] [CrossRef]
- Hauglin, M.; Hansen, E.H.; Næsset, E.; Busterud, B.E.; Gjevestad, J.G.O.; Gobakken, T. Accurate single-tree positions from a harvester: A test of two global satellite-based positioning systems. Scand. J. For. Res. 2017. [Google Scholar] [CrossRef]
- Reclus, F.; Drouard, K. Geofencing for fleet & freight management. In Proceedings of the 9th International Conference on Intelligent Transport Systems Telecommunications, Lille, France, 20–22 October 2009; pp. 353–356. [Google Scholar] [CrossRef]
- Anderson, D.M. Virtual fencing—Past, present and future. Rangel. J. 2007, 29, 65–78. [Google Scholar] [CrossRef]
- Butler, Z.; Corke, P.; Peterson, R.; Rus, D. From robots to animals: Virtual fences for controlling cattle. Int. J. Robot. Res. 2006, 25, 485–508. [Google Scholar] [CrossRef]
- Marsh, R.E. Fenceless Animal Control System Using GPS Location Information. U.S. Patent 5868100 A, 9 February 1999. [Google Scholar]
- Sheppard, J.K.; McGann, A.; Lanzone, M.; Swaisgood, R.R. An autonomous GPS geofence alert system to curtail avian fatalities at wind farms. Anim. Biotelem. 2015, 3, 1–8. [Google Scholar] [CrossRef]
- Umstatter, C. The evolution of virtual fences: A review. Comput. Electron. Agric. 2011, 75, 10–22. [Google Scholar] [CrossRef]
- Oregon Occupational Safety and Health Division. Oregon Administrative Rules, Chapter 437, Division 7 Forest Activities 2003. Available online: http://osha.oregon.gov/OSHARules/div7/div7.pdf (accessed on 3 May 2017).
- Deckert, C.; Bolstad, P.V. Forest canopy, terrain, and distance effects on Global Positioning System point accuracy. Photogramm. Eng. Remote Sens. 1996, 62, 317–321. [Google Scholar]
- Liu, C.J.; Brantigan, R. Using differential GPS for forest traverse surveys. Can. J. For. Res. 1995, 25, 1795–1805. [Google Scholar] [CrossRef]
- Rempel, R.S.; Rodgers, A.R. Effects of differential correction on accuracy of a GPS animal location system. J. Wildl. Manag. 1997, 61, 525–530. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2016; Available online: https://www.R-project.org/ (accessed on 30 December 2016).
- Parkinson, B.W.; Enge, P. Differential GPS. In Progress in Astronautics and Aeronatics: Global Positioning System: Theory and Applications; Parkinson, B.W., Spilker, J.J., Eds.; American Institute of Aeronautics and Astronautics, Inc.: Washington, DC, USA, 1994; Volume 2, pp. 3–49. ISBN 1600864201. [Google Scholar]
- Wang, L.; Li, Z.; Zhao, J.; Zhou, K.; Wang, Z.; Yuan, H. Smart device-supported BDS/GNSS real-time kinematic positioning for sub-meter-level accuracy in urban location-based services. Sensors 2016, 16, 2201. [Google Scholar] [CrossRef] [PubMed]
- D’Eon, R.G.; Serrouya, R.; Smith, G.; Kochanny, C.O. GPS Radiotelemetry error and bias in mountainous terrain. Wildl. Soc. Bull. 2002, 30, 430–439. [Google Scholar]
- Blum, R.; Bischof, R.; Sauter, U.H.; Foeller, J. Tests of reception of the combination of GPS and GLONASS signals under and above forest canopy in the Black Forest, Germany, using choke rings antennas. Int. J. For. Eng. 2015, 27, 2–14. [Google Scholar] [CrossRef]
- Wing, B.M.; Ritchie, M.W.; Boston, K.; Cohen, W.B.; Olsen, M.J. Individual snag detection using neighborhood attribute filtered airborne lidar data. Remote Sens. Environ. 2015, 163, 165–179. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stand | Cover | Mean Height (m) | Mean DBH (cm) | Azimith (°) | Slope (%) | Date | Mean Satellites | Mean PDOP |
|---|---|---|---|---|---|---|---|---|
| 260 | Mature | 23.52 | 33 | 95 | 37 | 10/12/16 | 7 | 1.6 |
| 58 | Clearcut | NA | NA | 352 | 18 | 10/17/16 | 8 | 1.3 |
| 531 | Clearcut | NA | NA | 165 | 35 | 10/19/16 | 8 | 1.4 |
| 290 | Mature | 14.6 | 25 | 35 | 5 | 10/19/16 | 7 | 1.5 |
| 345 | Clearcut | NA | NA | 130 | 8 | 10/24/16 | 10 | 1.3 |
| 139 | Mature | 16.7 | 31 | 347 | 43 | 10/24/16 | 6 | 1.6 |
| 524 | Mature | 17.3 | 31 | 27 | 14 | 11/10/16 | 6 | 1.7 |
| 262 | Clearcut | NA | NA | 205 | 2 | 11/17/16 | 8 | 1.2 |
| Cover | Stand | Unit RMSE (m) | ||||
|---|---|---|---|---|---|---|
| A | B | C | D | All Units | ||
| MATURE | 260 | 13.07 | 8.29 | 12.52 | 4.79 | 10.34 |
| 290 | 11.68 | 6.91 | 7.48 | 7.28 | 8.56 | |
| 139 | 11.23 | 7.68 | 12.78 | 7.90 | 10.14 | |
| 524 | 18.17 | 11.16 | 11.59 | 15.30 | 14.34 | |
| CLEARCUT | 58 | 4.33 | 5.36 | 2.98 | 1.46 | 3.81 |
| 531 | 2.42 | 1.67 | 3.16 | 3.01 | 2.64 | |
| 345 | 1.38 | 1.49 | 3.09 | 3.66 | 2.67 | |
| 262 | 3.96 | 3.69 | 4.52 | 4.07 | 4.09 | |
| Loader | Carriage | Snag | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Site | Obs. | Mat. | Clear. | Obs. | Mat. | Clear. | Obs. | Mat. | Clear. |
| JLP | 0.404 | 0.382 | 0.406 | 0.252 | 0.238 | 0.257 | 0.503 | 0.497 | 0.512 |
| (n = 100,886) | (n = 72,251) | (n = 110,495) | |||||||
| WTS | 0.226 | 0.220 | 0.225 | 0.477 | 0.449 | 0.477 | 0.363 | 0.361 | 0.362 |
| (n = 66,872) | (n = 70,430) | (n = 76,926) | |||||||
| UH | 0.492 | 0.487 | 0.491 | 0.449 | 0.423 | 0.449 | 0.528 | 0.498 | 0.523 |
| (n = 21,742) | (n = 56,490) | (n = 61,826) | |||||||
| Test | Compared Proportions | Value (Test Statistic) | Critical Range | Value > Critical Range? |
|---|---|---|---|---|
| 1 | JLPL-JLPC | 0.152 | 0.009 | yes |
| 2 | JLPL-JLPS | 0.099 | 0.008 | yes |
| 3 | JLPL-WTSL | 0.178 | 0.009 | yes |
| 4 | JLPL-UHL | 0.088 | 0.015 | yes |
| 5 | JLPC-JLPS | 0.251 | 0.009 | yes |
| 6 | JLPC-WTSC | 0.225 | 0.01 | yes |
| 7 | JLPC-UHC | 0.197 | 0.01 | yes |
| 8 | JLPS-WTSS | 0.14 | 0.009 | yes |
| 9 | JLPS-UHS | 0.025 | 0.01 | yes |
| 10 | WTSL-WTSC | 0.251 | 0.01 | yes |
| 11 | WTSL-WTSS | 0.137 | 0.009 | yes |
| 12 | WTSL-UHL | 0.266 | 0.015 | yes |
| 13 | WTSC-WTSS | 0.114 | 0.01 | yes |
| 14 | WTSC-UHC | 0.028 | 0.011 | yes |
| 15 | WTSS-UHS | 0.165 | 0.01 | yes |
| 16 | UHL-UHC | 0.043 | 0.016 | yes |
| 17 | UHL-UHS | 0.036 | 0.016 | yes |
| 18 | UHC-UHS | 0.079 | 0.011 | yes |
| Test | Compared Proportions | Mean Value (Test Statistic) | Mean Critical Range | Value > Critical Range? |
|---|---|---|---|---|
| JLP Loader | Obs.-Mat. | 0.022 | 0.005 | yes |
| Obs.-Clear. | 0.002 | 0.005 | no | |
| Mat.-Clear. | 0.024 | 0.005 | yes | |
| JLP Carriage | Obs.-Mat. | 0.014 | 0.006 | yes |
| Obs.-Clear. | 0.005 | 0.006 | no | |
| Mat.-Clear. | 0.019 | 0.006 | yes | |
| JLP Snag | Obs.-Mat. | 0.007 | 0.005 | yes |
| Obs.-Clear. | 0.009 | 0.005 | yes | |
| Mat.-Clear. | 0.016 | 0.005 | yes | |
| WTS Loader | Obs.-Mat. | 0.006 | 0.006 | no |
| Obs.-Clear. | 0.001 | 0.006 | no | |
| Mat.-Clear. | 0.005 | 0.006 | no | |
| WTS Carriage | Obs.-Mat. | 0.027 | 0.007 | yes |
| Obs.-Clear. | 0.000 | 0.007 | no | |
| Mat.-Clear. | 0.027 | 0.007 | yes | |
| WTS Snag | Obs.-Mat. | 0.002 | 0.006 | no |
| Obs.-Clear. | 0.000 | 0.006 | no | |
| Mat.-Clear. | 0.002 | 0.006 | no | |
| UH Loader | Obs.-Mat. | 0.005 | 0.012 | no |
| Obs.-Clear. | 0.001 | 0.012 | no | |
| Mat.-Clear. | 0.004 | 0.012 | no | |
| UH Carriage | Obs.-Mat. | 0.026 | 0.007 | yes |
| Obs.-Clear. | 0.001 | 0.007 | no | |
| Mat.-Clear. | 0.027 | 0.007 | yes | |
| UH Snag | Obs.-Mat. | 0.030 | 0.007 | yes |
| Obs.-Clear. | 0.005 | 0.007 | no | |
| Mat.-Clear. | 0.024 | 0.007 | yes |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wempe, A.M.; Keefe, R.F. Characterizing Rigging Crew Proximity to Hazards on Cable Logging Operations Using GNSS-RF: Effect of GNSS Positioning Error on Worker Safety Status. Forests 2017, 8, 357. https://doi.org/10.3390/f8100357
Wempe AM, Keefe RF. Characterizing Rigging Crew Proximity to Hazards on Cable Logging Operations Using GNSS-RF: Effect of GNSS Positioning Error on Worker Safety Status. Forests. 2017; 8(10):357. https://doi.org/10.3390/f8100357
Chicago/Turabian StyleWempe, Ann M., and Robert F. Keefe. 2017. "Characterizing Rigging Crew Proximity to Hazards on Cable Logging Operations Using GNSS-RF: Effect of GNSS Positioning Error on Worker Safety Status" Forests 8, no. 10: 357. https://doi.org/10.3390/f8100357
APA StyleWempe, A. M., & Keefe, R. F. (2017). Characterizing Rigging Crew Proximity to Hazards on Cable Logging Operations Using GNSS-RF: Effect of GNSS Positioning Error on Worker Safety Status. Forests, 8(10), 357. https://doi.org/10.3390/f8100357