Broadening Understanding on Managing the Communication Infrastructure in Vehicular Networks: Customizing the Coverage Using the Delta Network

 , , , and
, , , and
Abstract
:1. Introduction
2. Related Work
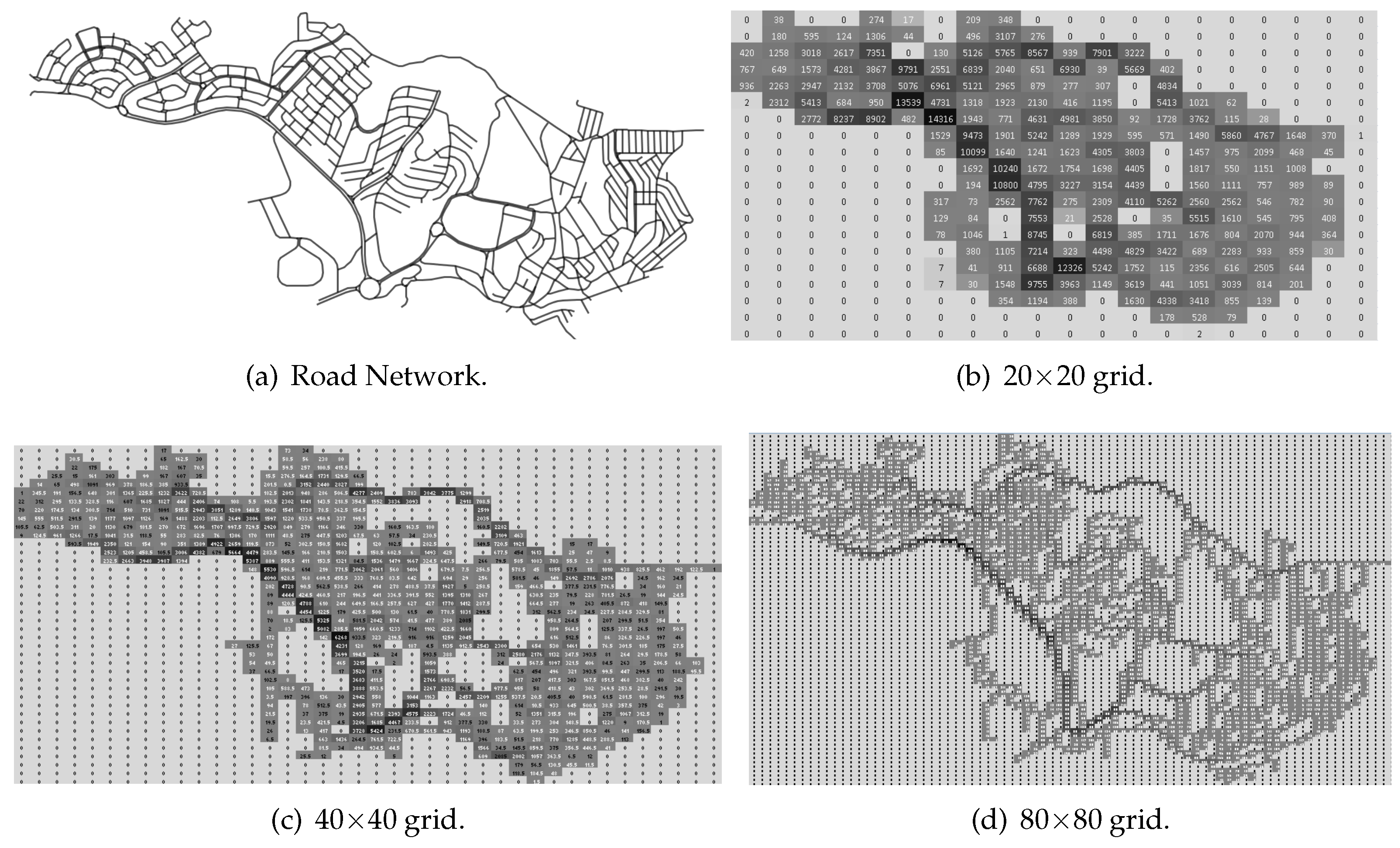
3. Delta Network: Measuring the Network Performance Using the Relation between the Connected Time and Trip Duration
Using the Delta Network to Reach a Specific Performance Target
4. Extending Delta Network to Global Solutions: Using Scores to Customize the Coverage
| Algorithm 1 General greedy heuristic | |
| Input:T, α; | ▹ Receives the trace and number of available cells for coverage. |
| Output: covered_cells | ▹ α covered cells. |
| 1: covered_cells ; | ▹ Clear vector holding deployed RSUs |
| 2: while |covered_cells| do | ▹ Loop until covering cells |
| 3: for each uncovered cell [x][y] in the grid do | ▹ Loop for all cells without roadside units |
| add_cell[x][y] to set covered_cells; | ▹ Temporarily cover the cell |
| 5: score[x][y] ←compute_score after adding cell [x][y]; | ▹ Compute score |
| 6: remove_cell [x][y] from covered_cells; | ▹ uncover the cell |
| 7: end for | |
| 8: [][] ←get_max_score(score[][]); | ▹ Get the coordinates of the cell returning the highest score |
| 9: add_cell[][] to set covered_cells; | ▹ Cover the cell definitely |
| 10: end while | |
| 11: return covered_cells; | |
5. Methods and Materials
| Algorithm 2 Strategy dl: Covering the most popular cells firstly. | |
| Input:V, α; | |
| Output: Y; | ▹ Cells to be covered |
| 1: sort(V); | ▹ Sort cells according to volume of traffic |
| 2: Y get_initial_elements(,); | ▹ Gets the initial elements of |
| 3: return Y; | |
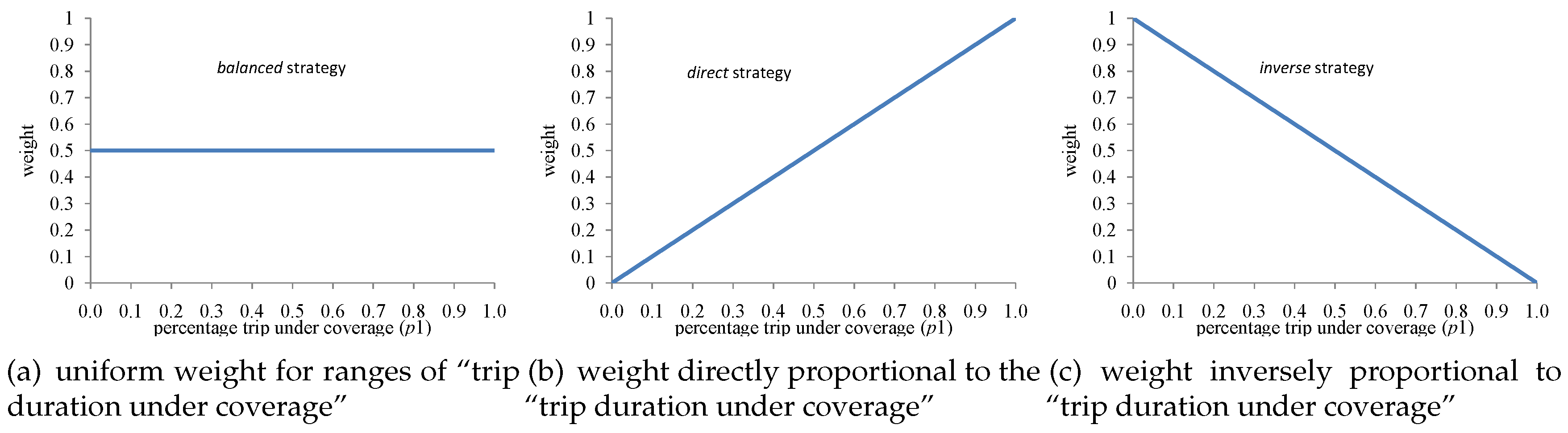
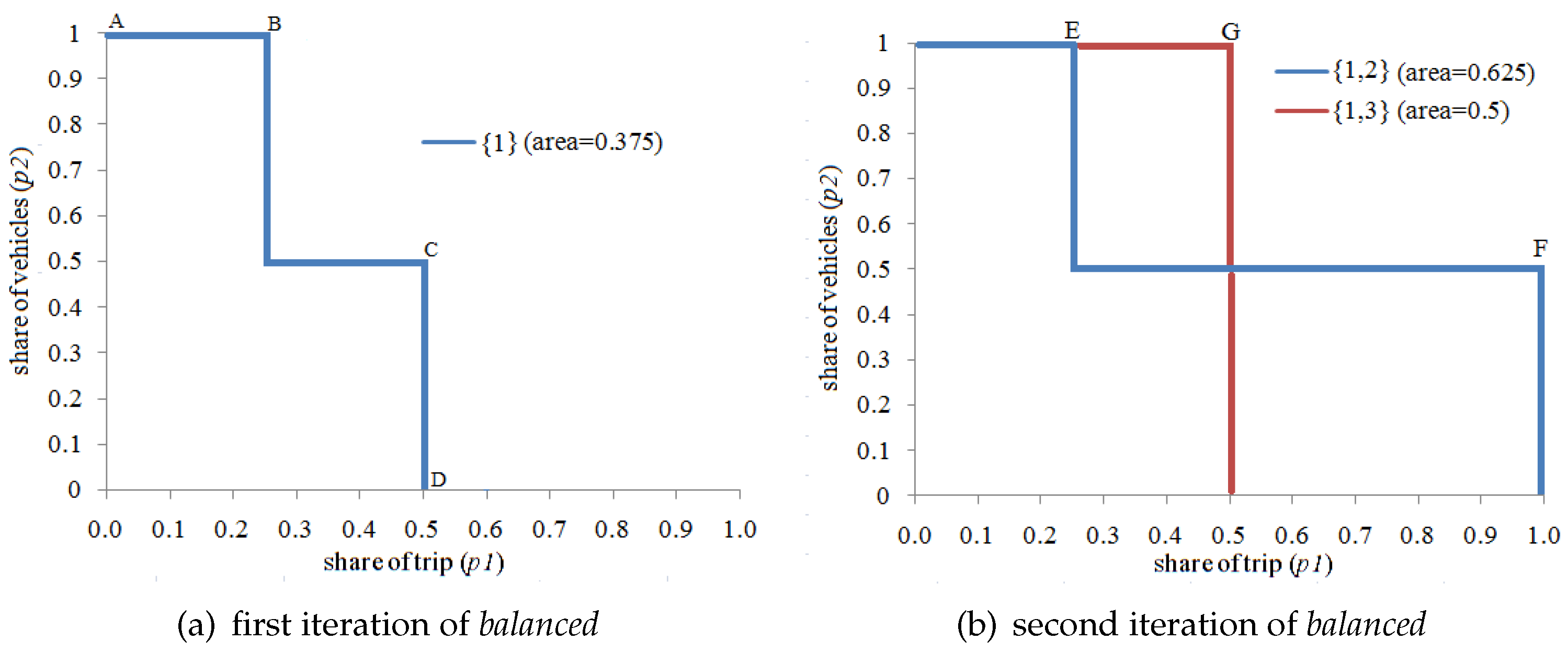
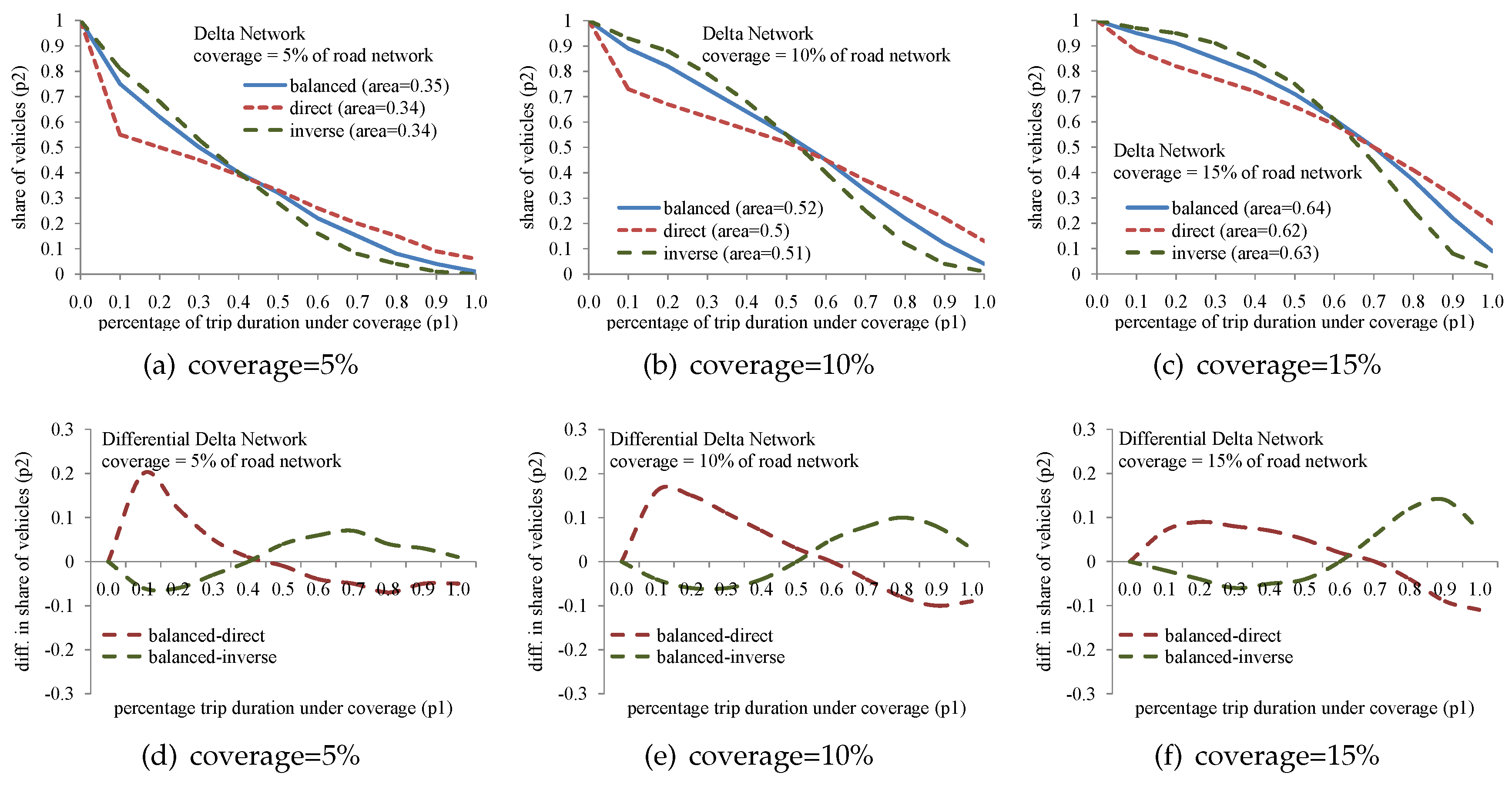
5.1. Strategy balanced: Uniform Distribution of Weights, Regardless of the Percentage Trip Duration under Coverage: An Alternative to Maximize the Area under the Delta Curve
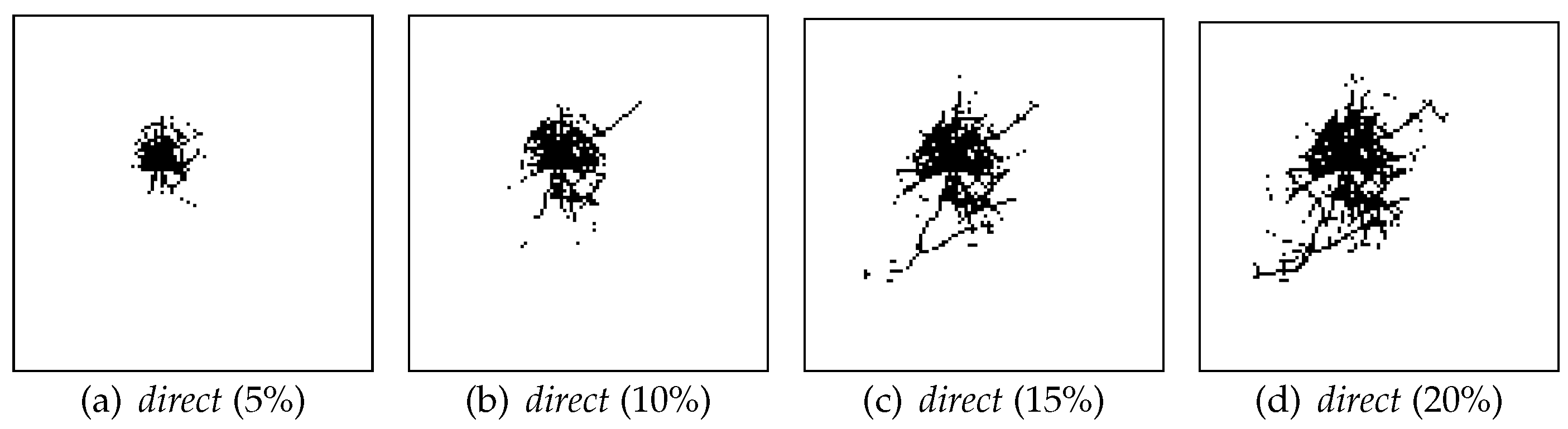
5.2. Strategy direct: Distribution of Weights Directly Proportional to the Percentage of Trip Traveled under Coverage: An Alternative to Prioritize Vehicles with High Coverage
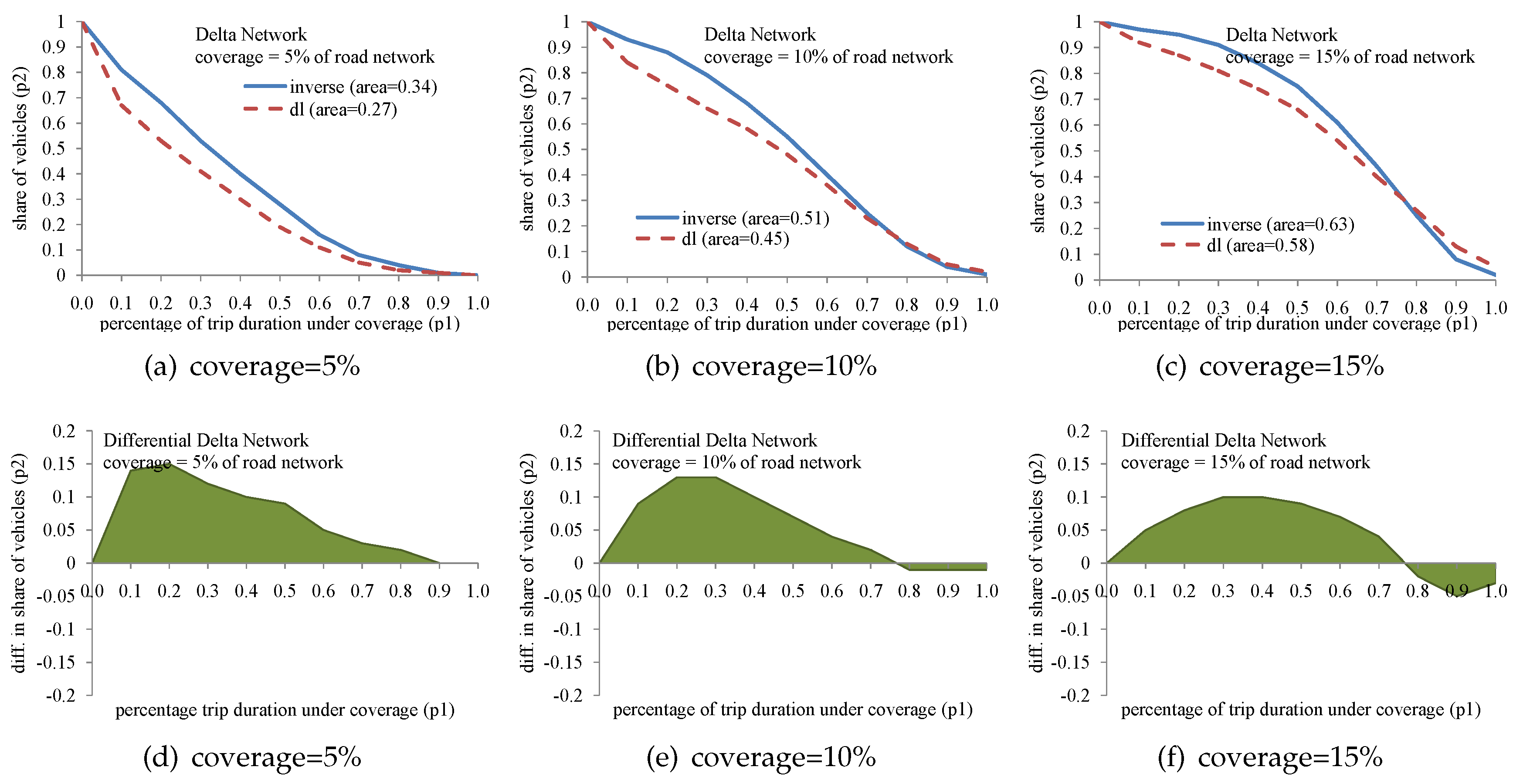
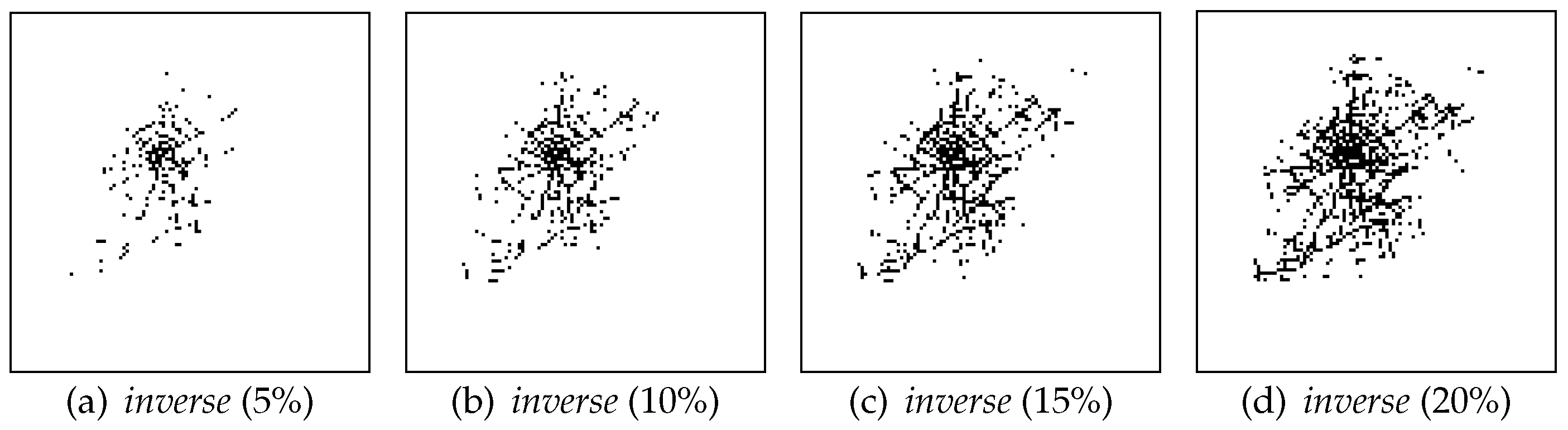
5.3. Strategy inverse: Distribution of Weights Inversely Proportional to the Percentage of Trip Traveled under Coverage: An Alternative to Prioritize Vehicles with Low Coverage
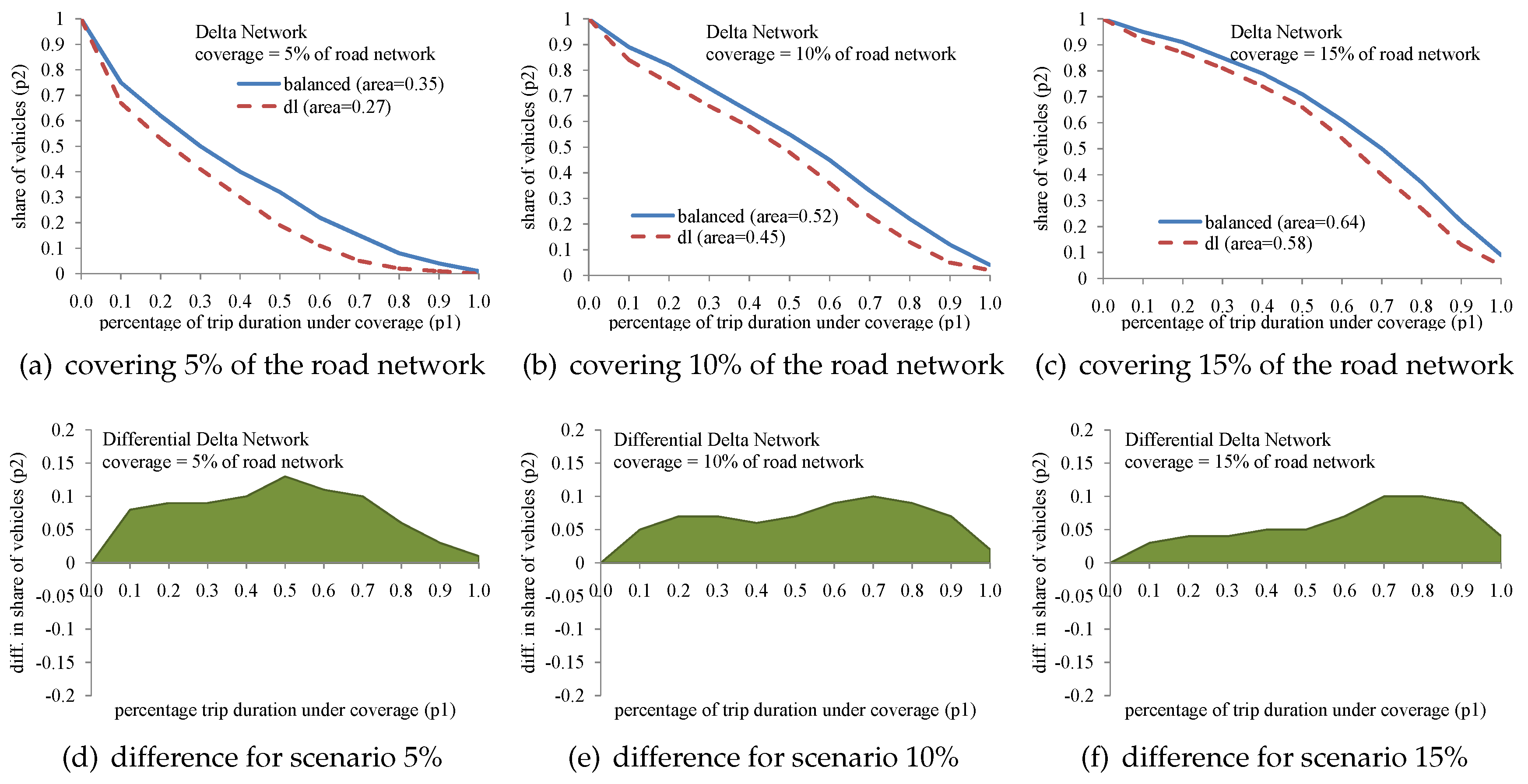
- (a)
- red curve (direct) positive in the first half of the x-axis indicates that balanced provides more connectivity than direct for low connected vehicles;
- (b)
- red curve (direct) negative in the second half of the x-axis indicates that balanced provides less connectivity than direct for highly connected vehicles;
- (c)
- green curve (inverse) negative in the first half of the x-axis indicates that balanced provides less connectivity than inverse for low connected vehicles;
- (d)
- green curve positive in the first half of the x-axis indicates that balanced provides more connectivity than inverse for highly connected vehicles.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Washburn, D.; Sindhu, U.; Balaouras, S.; Dines, R.A.; Hayes, N.; Nelson, L.E. Helping CIOs understand “smart city” initiatives. Growth 2009, 17, 1–17. [Google Scholar]
- Nam, T.; Pardo, T.A. Conceptualizing smart city with dimensions of technology, people, and institutions. In Proceedings of the 12th Annual International Digital Government Research Conference: Digital Government Innovation in Challenging Times, College Park, MD, USA, 12–15 June 2011; pp. 282–291. [Google Scholar]
- Caragliu, A.; Del Bo, C.; Nijkamp, P. Smart cities in Europe. J. Urban Technol. 2011, 18, 65–82. [Google Scholar] [CrossRef]
- Van Audenhove, F.J.; Korniichuk, O.; Dauby, L.; Pourbaix, J. The Future of Urban Mobility 2.0: Imperatives to Shape Extended Mobility Ecosystems of Tomorrow; Arthur D. Little in collaboration with UITP: Brussels, Belgium, 2014. [Google Scholar]
- Lozano-Perez, T. Autonomous Robot Vehicles; Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar]
- Katzev, R. Car sharing: A new approach to urban transportation problems. Anal. Soc. Issues Public Policy 2003, 3, 65–86. [Google Scholar] [CrossRef]
- Silva, C.M.; Masini, B.M.; Ferrari, G.; Thibault, I. A Survey on Infrastructure-Based Vehicular Networks. Mobile Inf. Syst. 2017, 2017, 28–56. [Google Scholar]
- Dighriri, M.; Lee, G.M.; Baker, T. Measurement and Classification of Smart Systems Data Traffic Over 5G Mobile Networks. In Technology for Smart Futures; Dastbaz, M., Arabnia, H., Akhgar, B., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 195–217. [Google Scholar]
- Swain, P.; Christophorou, C.; Bhattacharjee, U.; Silva, C.M.; Pitsillides, A. Selection of UE-based Virtual Small Cell Base Stations using Affinity Propagation Clustering. In Proceedings of the 2018 14th InternationalWireless Communications Mobile Computing Conference (IWCMC), Limassol, Cyprus, 25–29 June 2018; pp. 1104–1109. [Google Scholar]
- Vegni, A.M.; Loscri, V. A survey on vehicular social networks. IEEE Commun. Surv. Tutor. 2015, 17, 2397–2419. [Google Scholar] [CrossRef]
- Silva, C.M.; Sarubbi, J.F.; Silva, D.F.; Porto, M.F.; Nunes, N.T. A Mixed Load Solution for the Rural School Bus Routing Problem. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems (ITSC), Las Palmas, Spain, 15–18 September 2015; pp. 1940–1945. [Google Scholar]
- Lee, S.; Tewolde, G.; Kwon, J. Design and implementation of vehicle tracking system using GPS/GSM/GPRS technology and smartphone application. In Proceedings of the 2014 IEEE World Forum on Internet of Things (WF-IoT), Seoul, Korea, 6–8 March 2014; pp. 353–358. [Google Scholar]
- Araujo, R.; Igreja, A.; de Castro, R.; Araujo, R. Driving coach: A smartphone application to evaluate driving efficient patterns. In Proceedings of the 2012 IEEE Intelligent Vehicles Symposium (IV), Alcala de Henares, Spain, 3–7 June 2012; pp. 1005–1010. [Google Scholar]
- Johnson, D.A.; Trivedi, M.M. Driving style recognition using a smartphone as a sensor platform. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 1609–1615. [Google Scholar]
- Eriksson, J.; Girod, L.; Hull, B.; Newton, R.; Madden, S.; Balakrishnan, H. The pothole patrol: using a mobile sensor network for road surface monitoring. In Proceedings of the ACM MobiSys, Breckenridge, CO, USA, 17–20 June 2008. [Google Scholar]
- McClellan, S.; Follmer, T.; Maynard, E.; Capps, E.; Larson, G.; Ord, D.; Eyre, R.; Russon, V.; Watkins, C.; Vo, V.; et al. System and Method for Monitoring Vehicle Parameters and Driver Behavior. U.S. Patent 8,630,768, 2014. [Google Scholar]
- Oliveira, T.R.; Silva, C.M.; Macedo, D.F.; Nogueira, J.M. SNVC: Social networks for vehicular certification. Comput. Netw. 2016, 111, 129–140. [Google Scholar] [CrossRef]
- Zhang, Z.; Boukerche, A.; Ramadan, H. Design of a lightweight authentication scheme for IEEE 802.11p vehicular networks. Ad Hoc Netw. 2012, 10, 243–252. [Google Scholar] [CrossRef]
- Koukoumidis, E.; Peh, L.S.; Martonosi, M.R. SignalGuru: leveraging mobile phones for collaborative traffic signal schedule advisory. In Proceedings of the 9th International Conference on Mobile Systems, Applications, and Services, Bethesda, MD, USA, 28 June–1 July 2011; pp. 127–140. [Google Scholar]
- Rybick, J.; Scheuermann, B.; Kiess, W.; Lochert, C.; Fallahi, P.; Mauve, M. Challenge: Peers on wheels—A road to new traffic information systems. In Proceedings of the 13th Annual ACM International Conference on Mobile Computing and Networking (MobiCom 2007), Montreal, QC, Canada, 9–14 September 2007; pp. 215–221. [Google Scholar]
- Zaldivar, J.; Calafate, C.T.; Cano, J.C.; Manzoni, P. Providing accident detection in vehicular networks through OBD-II devices and android-based smartphones. In Proceedings of the 2011 IEEE 36th Conference on Local Computer Networks (LCN), Bonn, Germany, 4–7 October 2011; pp. 813–819. [Google Scholar]
- Thompson, C.; White, J.; Dougherty, B.; Albright, A.; Schmidt, D.C. Using smartphones to detect car accidents and provide situational awareness to emergency responders. In Mobile Wireless Middleware, Operating Systems, and Applications; Springer: Berlin, Germany, 2010; pp. 29–42. [Google Scholar]
- Masini, B.; Bazzi, A.; Zanella, A. A survey on the roadmap to mandate on board connectivity and enable V2V-based vehicular sensor networks. Sensors 2018, 18, 2207. [Google Scholar] [CrossRef]
- Mukhtar, A.; Xia, L.; Tang, T.B. Vehicle Detection Techniques for Collision Avoidance Systems: A Review. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2318–2338. [Google Scholar] [CrossRef]
- Di Bernardo, M.; Salvi, A.; Santini, S. Distributed consensus strategy for platooning of vehicles in the presence of time-varying heterogeneous communication delays. IEEE Trans. Intell. Transp. Syst. 2015, 16, 102–112. [Google Scholar] [CrossRef]
- Silva, C.M.; Aquino, A.L.L.; Meira, W., Jr. Smart Traffic Light for Low Traffic Conditions. Mob. Netw. Appl. 2015, 1–9. [Google Scholar] [CrossRef]
- Ferreira, M.C.P.; Tonguz, O.; Fernandes, R.J.; DaConceicao, H.M.F.; Viriyasitavat, W. Methods and Systems for Coordinating Vehicular Traffic Using in-Vehicle Virtual Traffic Control SignalS Enabled by Vehicle-to-Vehicle Communications. U.S. Patent 8,972,159, 2015. [Google Scholar]
- Kim, I.H.; Bong, J.H.; Park, J.; Park, S. Prediction of driver’s intention of lane change by augmenting sensor information using machine learning techniques. Sensors 2017, 17, 1350. [Google Scholar] [CrossRef] [PubMed]
- Silva, C.M.; Meira, W., Jr. Evaluating the Performance of Heterogeneous Vehicular Networks. In Proceedings of the 2015 IEEE 82nd Vehicular Technology Conference (VTC2015-Fall), Boston, MA, USA, 6–9 September 2015; pp. 1–5. [Google Scholar]
- Weeratunga, K.; Somers, A. Connected Vehicles: Are We Ready? Internal Report on Potential Implications for Main RoadsWA; Main RoadsWestern Australia: Perth, Australia, 2015. [Google Scholar]
- Lu, N.; Cheng, N.; Zhang, N.; Shen, X.; Mark, J.W. Connected vehicles: Solutions and challenges. IEEE Internet Things J. 2014, 1, 289–299. [Google Scholar] [CrossRef]
- Sanguesa, J.A.; Fogue, M.; Garrido, P.; Martinez, F.J.; Cano, J.C.; Calafate, C.T. A Survey and Comparative Study of Broadcast Warning Message Dissemination Schemes for VANETs. Mobile Inf. Syst. 2016, 2016, e16. [Google Scholar] [CrossRef]
- Liu, K.; Lee, V.S. RSU-based real-time data access in dynamic vehicular networks. In Proceedings of the 2010 13th International IEEE Conference on Intelligent Transportation Systems (ITSC), Funchal, Portugal, 19–22 September 2010; pp. 1051–1056. [Google Scholar]
- Bruno, R.; Nurchis, M. Robust and efficient data collection schemes for vehicular multimedia sensor Networks. In Proceedings of the 2013 IEEE 14th International Symposium and Workshops on World of Wireless, Mobile and Multimedia Networks (WoWMoM), Madrid, Spain, 4–7 June 2013; pp. 1–10. [Google Scholar]
- Shumao, O.; Kun, Y.; Hsiao-Hwa, C.; Alex, G. A selective downlink scheduling algorithm to enhance quality of VOD services for WAVE networks. EURASIP J. Wirel. Commun. Netw. 2009, 2009, 2. [Google Scholar]
- Zhang, Y.; Zhao, J.; Cao, G. Service Scheduling of Vehicle-Roadside Data Access. Mob. Netw. Appl. 2010, 15, 83–96. [Google Scholar] [CrossRef]
- Dighriri, M.; Lee, G.M.; Baker, T. Applying Scheduling Mechanisms Over 5G Cellular Network Packets Traffic. In Third International Congress on Information and Communication Technology; Yang, X.S., Sherratt, S., Dey, N., Joshi, A., Eds.; Springer: Singapore, 2019; pp. 119–131. [Google Scholar]
- Baker, T.; García-Campos, J.M.; Reina, D.G.; Toral, S.; Tawfik, H.; Al-Jumeily, D.; Hussain, A. GreeAODV: An Energy Efficient Routing Protocol for Vehicular Ad Hoc Networks. In Intelligent Computing Methodologies; Huang, D.S., Gromiha, M.M., Han, K., Hussain, A., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 670–681. [Google Scholar]
- Korkmaz, G.; Ekici, E.; Ozguner, F. A cross-layer multihop data delivery protocol with fairness guarantees for vehicular networks. IEEE Trans. Veh. Technol. 2006, 55, 865–875. [Google Scholar] [CrossRef]
- Hadaller, D.; Keshav, S.; Brecht, T. MV-MAX: Improving wireless infrastructure access for multi-vehicular communication. In Proceeding of the 2006 SIGCOMM Workshop, Pisa, Italy, 11–15 September 2006; pp. 269–276. [Google Scholar]
- Bazzi, A.; Masini, B.M.; Zanella, A.; Pasolini, G. IEEE 802.11P for Cellular Offloading in Vehicular Sensor Networks. Comput. Commun. 2015, 60, 97–108. [Google Scholar] [CrossRef]
- Trullols-Cruces, O.; Fiore, M.; Barcelo-Ordinas, J. Cooperative download in vehicular environments. IEEE Trans. Mob. Comput. 2012, 11, 663–678. [Google Scholar] [CrossRef]
- Silva, C.M.; Silva, F.A.; Sarubbi, J.F.; Oliveira, T.R.; Meira, W., Jr.; Nogueira, J.M.S. Designing mobile content delivery networks for the Internet of vehicles. Veh. Commun. 2017, 8, 45–55. [Google Scholar] [CrossRef]
- Lochert, C.; Scheuermann, B.; Wewetzer, C.; Luebke, A.; Mauve, M. Data Aggregation and Roadside Unit Placement for a Vanet Traffic Information System. In Proceedings of the Fifth ACM International Workshop on VehiculAr Inter-NETworking, San Francisco, CA, USA, 15 September 2008; pp. 58–65. [Google Scholar]
- Cavalcante, E.S.; Aquino, A.L.; Pappa, G.L.; Loureiro, A.A. Roadside Unit Deployment for Information Dissemination in a VANET: An Evolutionary Approach. In Proceedings of the Fourteenth International Conference on Genetic and Evolutionary Computation Conference Companion, Philadelphia, PA, USA, 7–11 July 2012; pp. 27–34. [Google Scholar]
- Aslam, B.; Amjad, F.; Zou, C. Optimal roadside units placement in urban areas for vehicular networks. In Proceedings of the 2012 IEEE Symposium on Computers and Communications (ISCC), Cappadocia, Turkey, 1–4 July 2012; pp. 000423–000429. [Google Scholar]
- Liang, Y.; Liu, H.; Rajan, D. Optimal Placement and Configuration of Roadside Units in Vehicular Networks. In Proceedings of the 2012 IEEE 75th Vehicular Technology Conference (VTC Spring), Yokohama, Japan, 6–9 May 2012; pp. 1–6. [Google Scholar]
- Trullols, O.; Fiore, M.; Casetti, C.; Chiasserini, C.; Ordinas, J.B. Planning roadside infrastructure for information dissemination in intelligent transportation systems. Computer Commun. 2010, 33, 432–442. [Google Scholar] [CrossRef]
- Silva, C.M.; Meira, W.; Sarubbi, J.F.M. Non-Intrusive Planning the Roadside Infrastructure for Vehicular Networks. IEEE Trans. Intell. Transp. Syst. 2016, 17, 938–947. [Google Scholar] [CrossRef]
- Bazzi, A.; Masini, B.M.; Andrisano, O. On the Frequent Acquisition of Small Data Through RACH in UMTS for ITS Applications. IEEE Trans. Veh. Technol. 2011, 60, 2914–2926. [Google Scholar] [CrossRef]
- Zheng, Z.; Sinha, P.; Kumar, S. Alpha Coverage: Bounding the Interconnection Gap for Vehicular Internet Access. In Proceedings of the INFOCOM 2009, Rio de Janeiro, Brazil, 19–25 April 2009; pp. 2831–2835. [Google Scholar]
- Sarubbi, J.F.M.; Silva, C.M. Delta-r: A novel and more economic strategy for allocating the roadside infrastructure in vehicular networks with guaranteed levels of performance. In Proceedings of the NOMS 2016 IEEE/IFIP Network Operations and Management Symposium, Istanbul, Turkey, 25–29 April 2016; pp. 665–671. [Google Scholar]
- Silva, C.M.; Silva, F.; Nogueira, J.M.S. Delivering Heterogeneous Contents with Distinct Performance Requirements in Vehicular Networks. In Proceedings of the 2016 IEEE Symposium on Computers and Communications (ISCC), Messina, Italy, 27–30 June 2016. [Google Scholar]
- Uppoor, S.; Trullols-Cruces, O.; Fiore, M.; Barcelo-Ordinas, J.M. Generation and analysis of a large-scale urban vehicular mobility dataset. IEEE Trans. Mob. Comput. 2014, 13, 1061–1075. [Google Scholar] [CrossRef]
- Rice, S. Efficient evaluation of integrals of analytic functions by the trapezoidal rule. Bell Syst. Tech. J. 1973, 52, 707–722. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Strategy | Score Computation | Style of Coverage |
|---|---|---|
| balanced | select cell maximizing the area under the Delta curve | moderate density around the epicenter of traffic |
| direct | select cell prioritizing vehicles with high coverage | high density around the epicenter of traffic |
| inverse | select cell prioritizing vehicles with low/no coverage | low density around the epicenter of traffic |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Silva, C.M.; Silva, L.D.; Santos, L.A.L.; Sarubbi, J.F.M.; Pitsillides, A. Broadening Understanding on Managing the Communication Infrastructure in Vehicular Networks: Customizing the Coverage Using the Delta Network. Future Internet 2019, 11, 1. https://doi.org/10.3390/fi11010001
Silva CM, Silva LD, Santos LAL, Sarubbi JFM, Pitsillides A. Broadening Understanding on Managing the Communication Infrastructure in Vehicular Networks: Customizing the Coverage Using the Delta Network. Future Internet. 2019; 11(1):1. https://doi.org/10.3390/fi11010001
Chicago/Turabian StyleSilva, Cristiano M., Lucas D. Silva, Leonardo A. L. Santos, João F. M. Sarubbi, and Andreas Pitsillides. 2019. "Broadening Understanding on Managing the Communication Infrastructure in Vehicular Networks: Customizing the Coverage Using the Delta Network" Future Internet 11, no. 1: 1. https://doi.org/10.3390/fi11010001