
A Lithium-Ion Battery Remaining Useful Life Prediction Model Based on CEEMDAN Data Preprocessing and HSSA-LSTM-TCN


Abstract
:1. Introduction
2. Introduction to Relevant Theories
2.1. CEEMDAN
- (1)
- Introduce Gaussian white noise with an initial amplitude to the original battery capacity sequence , forming a new capacity sequence, as shown in Equation (2). Here, t represents the number of cycles of the battery.
- (2)
- Using EMD to decompose for i iterations, a series of intrinsic mode functions is obtained. Taking the overall average of these functions yields the first mode component of the battery decomposition, as shown in Equation (3).
- (3)
- Calculate the first unique residual signal from the battery decomposition, obtaining Equation (4).
- (4)
- denotes the k-th mode component obtained after EMD processing. In each of the experiments, the signal is decomposed, resulting in the second mode component and the second residual signal, as expressed in Equations (5) and (6).
- (5)
- For the k-th stage, repeat Step (4), continually decomposing the signal and calculating the (k + 1)-th mode component, as expressed in Equation (7).
- (6)
- Repeat Step (5) until the residual signal can no longer be further decomposed. At this point, the final number of mode components obtained is K. Decomposition stops, and the original signal is expressed as Equation (8).
2.2. TCN
2.3. LSTM
2.4. SSA
3. CEEMDAN-IHSSA-LSTM-TCN Prediction Model
3.1. IHSSA
3.2. IHSSA-LSTM Prediction Model
- (1)
- Divide the dataset into training and testing sets.
- (2)
- Initialize the parameters in the SSA, such as the number of individuals in the population N, the maximum number of iterations i_max, the proportion of discoverers in the population, the proportion of sentinels in the population, the safety threshold, etc.
- (3)
- Use chaotic iterative mapping to initialize the sparrow population.
- (4)
- Use the Mean Square Error as the fitness function, calculate the fitness value of the individual sparrows in the sparrow population, and obtain the optimal sparrow fitness value and their positions.
- (5)
- According to Equations (16), (18) and (21), update the positions of the producers, followers, and sentinels, respectively.
- (6)
- Select individuals based on the size of the fitness value and update the global optimal fitness value.
- (7)
- Repeat Step (4) until the termination condition is met. Output the position of the optimal sparrow individual, that is, the best hyperparameter value, input the obtained parameters into the LSTM model, and use the trained prediction model for prediction.
3.3. TCN Prediction Model
3.4. CEEMDAN-IHSSA-LSTM-TCN Prediction Model Workflow
- (1)
- Applying the CEEMDAN to preprocess the normalized lithium-ion battery capacity sequence, decomposition using sample entropy [35] results in three IMF components (high-frequency components) and one residual sequence R (low-frequency component).
- (2)
- Divide the data into training and testing sets.
- (3)
- Employing the TCN model for forecasting the IMFs components and utilizing the IHSSA-LSTM model for predicting the residual sequence R results in predictions for the two respective components.
- (4)
- Combining the predictions from the two components yields the final forecast for the RUL of lithium-ion batteries.
4. Experiments and Results Analysis
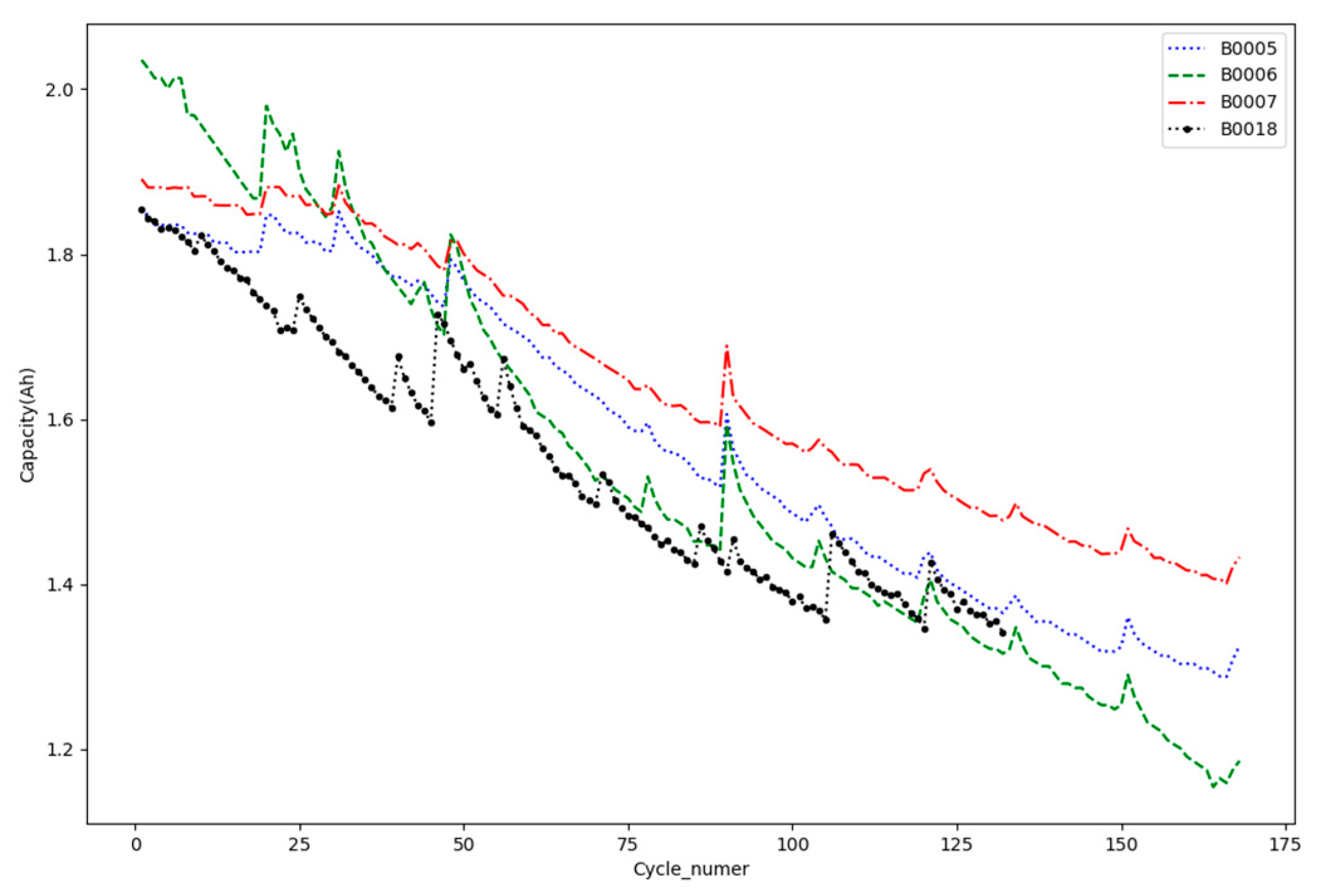
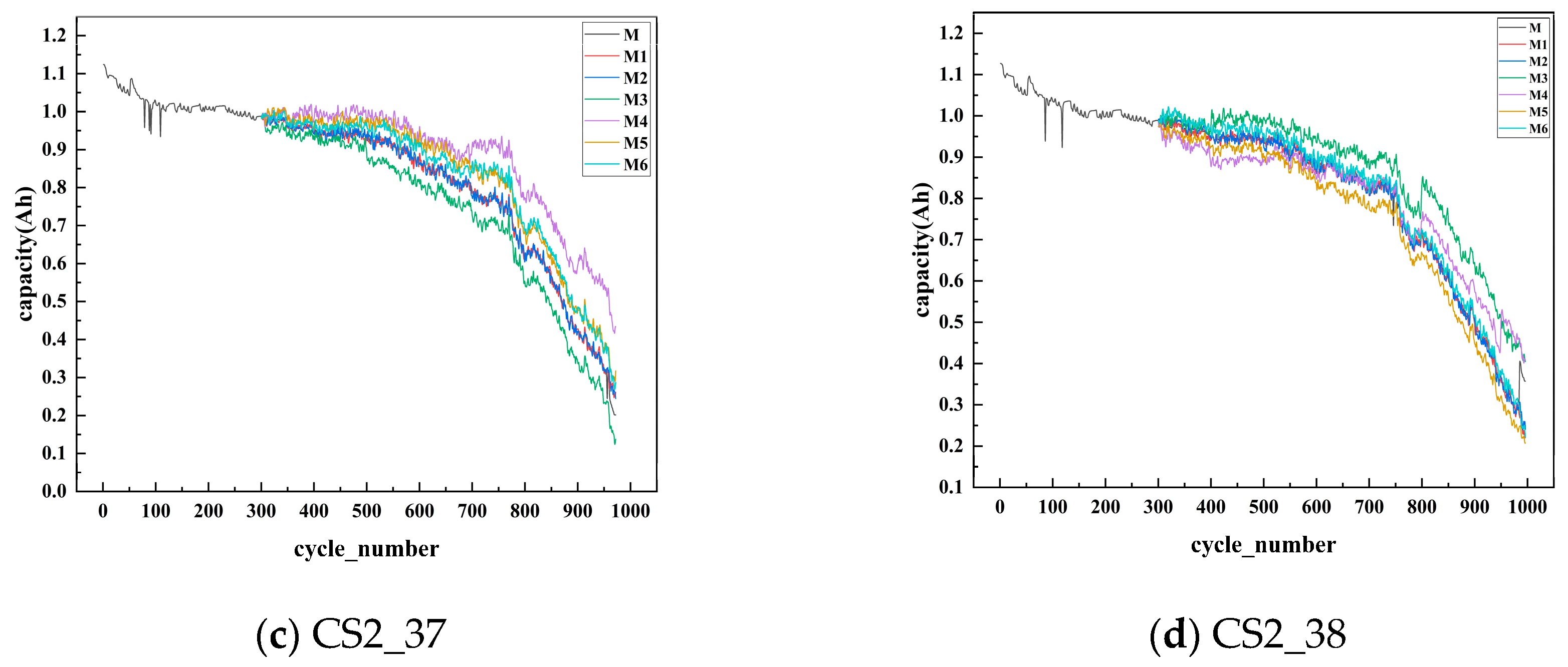
4.1. Introduction to the Experimental Dataset
4.2. Evaluation Metrics
4.3. Process of the Experiment
4.4. Experimental Results and Analysis
5. Conclusions
- (1)
- Utilizing the CEEMDAN to decompose lithium-ion battery capacity data into components with distinct features reduces the impact of battery capacity regeneration and noise on the prediction of RUL. Consequently, this diminishes prediction errors and enhances prediction accuracy.
- (2)
- Separating the IMF components into high-frequency and low-frequency portions and employing specialized networks for targeted predictions enable effective capture of data features. The integration of predictions from both networks yields more accurate RUL results, significantly enhancing the precision and stability of the prediction method.
- (3)
- By introducing iterative chaotic mapping and the variable spiral coefficient, the SSA was optimized to enhance both local and global search capabilities. This optimization led to an improvement in the ability to tune the hyperparameters of LSTM.
- (4)
- On the NASA dataset and CALCE dataset, through comparisons with various other models, the proposed predictive model in this study demonstrated higher prediction accuracy.
- (5)
- Due to the adoption of modal decomposition, and the method of predicting and combining each decomposed mode separately, the prediction time has significantly increased. Therefore, future efforts should be made to find more effective methods to improve prediction accuracy, while reducing the prediction time of the model.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Symbol comparison table | |
| CALCE | Center for Advanced Life Cycle Engineering |
| CEEMDAN | Complete Ensemble Empirical Mode Decomposition with Adaptive Noise |
| LSTM | Long Short-Term Memory |
| MAE | Mean absolute error |
| NASA | National Aeronautics and Space Administration |
| RUL | Remaining Useful Life |
| SSA | Sparrow Search Algorithm |
| TCN | Temporal Convolutional Network |
References
- Rahimi, M. Lithium-Ion Batteries: Latest Advances and Prospects. Batteries 2021, 7, 8. [Google Scholar] [CrossRef]
- Chen, X.; Liu, Z. A Long Short-Term Memory Neural Network Based Wiener Process Model for Remaining Useful Life Prediction. Reliab. Eng. Syst. Saf. 2022, 226, 108651. [Google Scholar] [CrossRef]
- Chen, X.; Liu, Z.; Wang, J.; Yang, C.; Long, B.; Zhou, X. An Adaptive Prediction Model for the Remaining Life of an Li-Ion Battery Based on the Fusion of the Two-Phase Wiener Process and an Extreme Learning Machine. Electronics 2021, 10, 540. [Google Scholar] [CrossRef]
- Liu, K.; Shang, Y.; Ouyang, Q.; Widanage, W.D. A Data-Driven Approach with Uncertainty Quantification for Predicting Future Capacities and Remaining Useful Life of Lithium-Ion Battery. IEEE Trans. Ind. Electron. 2020, 68, 3170–3180. [Google Scholar] [CrossRef]
- Jafari, S.; Byun, Y.-C. A CNN-GRU Approach to the Accurate Prediction of Batteries’ Remaining Useful Life from Charging Profiles. Computers 2023, 12, 219. [Google Scholar] [CrossRef]
- Sadabadi, K.K.; Jin, X.; Rizzoni, G. Prediction of Remaining Useful Life for a Composite Electrode Lithium Ion Battery Cell Using an Electrochemical Model to Estimate the State of Health. J. Power Sources 2021, 481, 228861. [Google Scholar] [CrossRef]
- Zhou, Y.; Gu, H.; Su, T.; Han, X.; Lu, L.; Zheng, Y. Remaining Useful Life Prediction with Probability Distribution for Lithium-Ion Batteries Based on Edge and Cloud Collaborative Computation. J. Energy Storage 2021, 44, 103342. [Google Scholar] [CrossRef]
- Jin, S.; Sui, X.; Huang, X.; Wang, S.; Teodorescu, R.; Stroe, D.-I. Overview of Machine Learning Methods for Lithium-Ion Battery Remaining Useful Lifetime Prediction. Electronics 2021, 10, 3126. [Google Scholar] [CrossRef]
- Peng, J.; Meng, J.; Chen, D.; Liu, H.; Hao, S.; Sui, X.; Du, X. A Review of Lithium-Ion Battery Capacity Estimation Methods for Onboard Battery Management Systems: Recent Progress and Perspectives. Batteries 2022, 8, 229. [Google Scholar] [CrossRef]
- Rincón-Maya, C.; Guevara-Carazas, F.; Hernández-Barajas, F.; Patino-Rodriguez, C.; Usuga-Manco, O. Remaining Useful Life Prediction of Lithium-Ion Battery Using ICC-CNN-LSTM Methodology. Energies 2023, 16, 7081. [Google Scholar] [CrossRef]
- Tian, J.; Xu, R.; Wang, Y.; Chen, Z. Capacity Attenuation Mechanism Modeling and Health Assessment of Lithium-Ion Batteries. Energy 2021, 221, 119682. [Google Scholar] [CrossRef]
- Yang, F.; Song, X.; Dong, G.; Tsui, K.-L. A Coulombic Efficiency-Based Model for Prognostics and Health Estimation of Lithium-Ion Batteries. Energy 2019, 171, 1173–1182. [Google Scholar] [CrossRef]
- Wang, S.; Fernandez, C.; Yu, C.; Fan, Y.; Cao, W.; Stroe, D.-I. A Novel Charged State Prediction Method of the Lithium Ion Battery Packs Based on the Composite Equivalent Modeling and Improved Splice Kalman Filtering Algorithm. J. Power Sources 2020, 471, 228450. [Google Scholar] [CrossRef]
- Wang, D.; Kong, J.; Yang, F.; Zhao, Y.; Tsui, K.-L. Battery Prognostics at Different Operating Conditions. Measurement 2020, 151, 107182. [Google Scholar] [CrossRef]
- Zhang, H.; Miao, Q.; Zhang, X.; Liu, Z. An Improved Unscented Particle Filter Approach for Lithium-Ion Battery Remaining Useful Life Prediction. Microelectron. Reliab. 2018, 81, 288–298. [Google Scholar] [CrossRef]
- Shen, S.; Sadoughi, M.; Li, M.; Wang, Z.; Hu, C. Deep Convolutional Neural Networks with Ensemble Learning and Transfer Learning for Capacity Estimation of Lithium-Ion Batteries. Appl. Energy 2020, 260, 114296. [Google Scholar] [CrossRef]
- Niu, G.; Wang, X.; Liu, E.; Zhang, B. Lebesgue Sampling Based Deep Belief Network for Lithium-Ion Battery Diagnosis and Prognosis. IEEE Trans. Ind. Electron. 2021, 69, 8481–8490. [Google Scholar] [CrossRef]
- Ansari, S.; Ayob, A.; Hossain Lipu, M.S.; Hussain, A.; Saad, M.H.M. Data-Driven Remaining Useful Life Prediction for Lithium-Ion Batteries Using Multi-Charging Profile Framework: A Recurrent Neural Network Approach. Sustainability 2021, 13, 13333. [Google Scholar] [CrossRef]
- Waseem, M.; Huang, J.; Wong, C.-N.; Lee, C.K.M. Data-Driven GWO-BRNN-Based SOH Estimation of Lithium-Ion Batteries in EVs for Their Prognostics and Health Management. Mathematics 2023, 11, 4263. [Google Scholar] [CrossRef]
- Zhao, S.; Zhang, C.; Wang, Y. Lithium-Ion Battery Capacity and Remaining Useful Life Prediction Using Board Learning System and Long Short-Term Memory Neural Network. J. Energy Storage 2022, 52, 104901. [Google Scholar] [CrossRef]
- Wang, F.-K.; Amogne, Z.E.; Chou, J.-H.; Tseng, C. Online Remaining Useful Life Prediction of Lithium-Ion Batteries Using Bidirectional Long Short-Term Memory with Attention Mechanism. Energy 2022, 254, 124344. [Google Scholar] [CrossRef]
- Jia, X.; Zhang, C.; Zhang, L.; Zhou, X. Early Diagnosis of Accelerated Aging for Lithium-Ion Batteries with an Integrated Framework of Aging Mechanisms and Data-Driven Methods. IEEE Trans. Transp. Electrif. 2022, 8, 4722–4742. [Google Scholar] [CrossRef]
- Kang, W.; Xiao, J.; Xiao, M.; Hu, Y.; Zhu, H.; Li, J. Research on Remaining Useful Life Prognostics Based on Fuzzy Evaluation-Gaussian Process Regression Method. IEEE Access 2020, 8, 71965–71973. [Google Scholar] [CrossRef]
- Zhu, X.; Zhang, P.; Xie, M. A Joint Long Short-Term Memory and AdaBoost Regression Approach with Application to Remaining Useful Life Estimation. Measurement 2021, 170, 108707. [Google Scholar] [CrossRef]
- Liu, Y.; Sun, J.; Shang, Y.; Zhang, X.; Ren, S.; Wang, D. A Novel Remaining Useful Life Prediction Method for Lithium-Ion Battery Based on Long Short-Term Memory Network Optimized by Improved Sparrow Search Algorithm. J. Energy Storage 2023, 61, 106645. [Google Scholar] [CrossRef]
- Wang, D.; Kong, J.-Z.; Zhao, Y.; Tsui, K.-L. Piecewise Model Based Intelligent Prognostics for State of Health Prediction of Rechargeable Batteries with Capacity Regeneration Phenomena. Measurement 2019, 147, 106836. [Google Scholar] [CrossRef]
- Li, X.; Zhang, L.; Wang, Z.; Dong, P. Remaining Useful Life Prediction for Lithium-Ion Batteries Based on a Hybrid Model Combining the Long Short-Term Memory and Elman Neural Networks. J. Energy Storage 2019, 21, 510–518. [Google Scholar] [CrossRef]
- Tang, X.; Wan, H.; Wang, W.; Gu, M.; Wang, L.; Gan, L. Lithium-Ion Battery Remaining Useful Life Prediction Based on Hybrid Model. Sustainability 2023, 15, 6261. [Google Scholar] [CrossRef]
- Zhou, D.; Li, Z.; Zhu, J.; Zhang, H.; Hou, L. State of Health Monitoring and Remaining Useful Life Prediction of Lithium-Ion Batteries Based on Temporal Convolutional Network. IEEE Access 2020, 8, 53307–53320. [Google Scholar] [CrossRef]
- Ban, W.; Shen, L. PM2. 5 Prediction Based on the CEEMDAN Algorithm and a Machine Learning Hybrid Model. Sustainability 2022, 14, 16128. [Google Scholar] [CrossRef]
- Qu, W.; Chen, G.; Zhang, T. An Adaptive Noise Reduction Approach for Remaining Useful Life Prediction of Lithium-Ion Batteries. Energies 2022, 15, 7422. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. A Novel Swarm Intelligence Optimization Approach: Sparrow Search Algorithm. Syst. Sci. Control Eng. 2020, 8, 22–34. [Google Scholar] [CrossRef]
- Wei, X.; Zhang, Y.; Zhao, Y. Evacuation Path Planning Based on the Hybrid Improved Sparrow Search Optimization Algorithm. Fire 2023, 6, 380. [Google Scholar] [CrossRef]
- Zhang, Z.; He, R.; Yang, K. A Bioinspired Path Planning Approach for Mobile Robots Based on Improved Sparrow Search Algorithm. Adv. Manuf. 2022, 10, 114–130. [Google Scholar] [CrossRef]
- Xiang, D.; Ge, S. Method of Fault Feature Extraction Based on EMD Sample Entropy and LLTSA. J. Aerosp. Power 2014, 29, 1535–1542. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Modules | Network | In Channels | Out Channels | Dilation Factor |
|---|---|---|---|---|
| Module 1 | 1 9 Conv | 1 | 64 | 1 |
| 1 9 Conv | 64 | 64 | 1 | |
| 1 1 Conv | 1 | 64 | ||
| Module 2 | 1 9 Conv | 64 | 128 | 2 |
| 1 9 Conv | 128 | 128 | 2 | |
| 1 1 Conv | 64 | 128 | ||
| Module 3 | 1 9 Conv | 128 | 256 | 4 |
| 1 9 Conv | 256 | 256 | 4 | |
| 1 1 Conv | 128 | 256 | ||
| Module 4 | 1 9 Conv | 256 | 512 | 8 |
| 1 9 Conv | 512 | 512 | 8 | |
| 1 1 Conv | 256 | 512 | ||
| Module 5 | 1 9 Conv | 512 | 1024 | 16 |
| 1 9 Conv | 1024 | 1024 | 16 | |
| 1 1 Conv | 512 | 1024 | ||
| SE | Full Connection | 1024 | 512 | |
| Full Connection | 512 | 1024 |
| Number | Metrics | M1 | M2 | M3 | M4 | M5 | M6 |
|---|---|---|---|---|---|---|---|
| B0005 | MAE (%) | 0.816 | 1.242 | 2.607 | 3.681 | 2.232 | 1.898 |
| RMSE (%) | 1.114 | 1.599 | 2.637 | 3.741 | 2.538 | 1.988 | |
| Time (s) | 74.65 | 73.42 | 15.86 | 12.69 | 23.57 | 17.86 | |
| B0006 | MAE (%) | 0.956 | 1.415 | 2.730 | 3.443 | 2.399 | 1.747 |
| RMSE (%) | 1.623 | 2.050 | 2.981 | 4.078 | 2.615 | 2.067 | |
| Time (s) | 69.06 | 68.87 | 13.56 | 10.98 | 20.07 | 18.76 | |
| B0007 | MAE (%) | 0.690 | 1.035 | 2.022 | 2.606 | 1.522 | 1.450 |
| RMSE (%) | 1.005 | 1.483 | 2.225 | 2.918 | 1.636 | 1.996 | |
| Time (s) | 72.41 | 73.98 | 14.93 | 11.52 | 21.65 | 19.25 | |
| B0018 | MAE (%) | 0.725 | 1.222 | 2.703 | 2.359 | 1.513 | 1.428 |
| RMSE (%) | 0.996 | 1.578 | 3.125 | 2.688 | 1.698 | 1.743 | |
| Time (s) | 74.13 | 76.24 | 15.63 | 13.25 | 23.78 | 21.14 |
| Number | Metrics | M1 | M2 | M3 | M4 | M5 | M6 |
|---|---|---|---|---|---|---|---|
| CS2_35 | MAE (%) | 1.384 | 1.750 | 2.918 | 4.168 | 3.313 | 1.927 |
| RMSE (%) | 2.073 | 2.730 | 3.614 | 5.315 | 4.064 | 3.022 | |
| CS2_36 | MAE (%) | 1.295 | 1.433 | 5.799 | 5.229 | 2.700 | 1.948 |
| RMSE (%) | 1.520 | 1.753 | 6.780 | 5.784 | 3.262 | 2.383 | |
| CS2_37 | MAE (%) | 1.258 | 1.434 | 3.827 | 7.310 | 3.242 | 3.174 |
| RMSE (%) | 1.858 | 1.950 | 4.248 | 9.063 | 3.882 | 3.991 | |
| CS2_38 | MAE (%) | 1.408 | 1.551 | 5.463 | 7.373 | 2.704 | 2.008 |
| RMSE (%) | 2.082 | 2.224 | 6.425 | 8.591 | 3.478 | 2.571 |
| Number | Metrics | M1 | M2 | M3 | M4 | M5 | M6 |
|---|---|---|---|---|---|---|---|
| CS2_35 | MAE (%) | 1.533 | 1.673 | 3.160 | 5.261 | 2.765 | 1.974 |
| RMSE (%) | 2.588 | 2.598 | 4.109 | 6.957 | 3.769 | 3.370 | |
| CS2_36 | MAE (%) | 1.706 | 1.941 | 4.548 | 4.839 | 3.042 | 1.946 |
| RMSE (%) | 2.628 | 3.161 | 5.770 | 5.799 | 3.919 | 2.569 | |
| CS2_37 | MAE (%) | 1.008 | 1.373 | 5.105 | 10.04 | 4.783 | 4.249 |
| RMSE (%) | 1.479 | 1.444 | 5.627 | 11.68 | 5.203 | 4.970 | |
| CS2_38 | MAE (%) | 1.455 | 1.812 | 7.471 | 4.348 | 3.721 | 2.115 |
| RMSE (%) | 2.053 | 2.542 | 8.766 | 5.800 | 4.239 | 2.779 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, S.; Zhang, B.; Lv, Y.; Zhang, J.; Zhang, C. A Lithium-Ion Battery Remaining Useful Life Prediction Model Based on CEEMDAN Data Preprocessing and HSSA-LSTM-TCN. World Electr. Veh. J. 2024, 15, 177. https://doi.org/10.3390/wevj15050177
Qiu S, Zhang B, Lv Y, Zhang J, Zhang C. A Lithium-Ion Battery Remaining Useful Life Prediction Model Based on CEEMDAN Data Preprocessing and HSSA-LSTM-TCN. World Electric Vehicle Journal. 2024; 15(5):177. https://doi.org/10.3390/wevj15050177
Chicago/Turabian StyleQiu, Shaoming, Bo Zhang, Yana Lv, Jie Zhang, and Chao Zhang. 2024. "A Lithium-Ion Battery Remaining Useful Life Prediction Model Based on CEEMDAN Data Preprocessing and HSSA-LSTM-TCN" World Electric Vehicle Journal 15, no. 5: 177. https://doi.org/10.3390/wevj15050177