Optimizing the Construction Job Site Vehicle Scheduling Problem


Abstract
:1. Introduction
2. Literature Review
2.1. Overview of the Vehicle Scheduling Problem
2.2. Exact vs. Heuristic Algorithms
2.3. Ant Colony Optimization (ACO)
2.4. Mathematical Model of ACO for Route Construction
3. Modeling the RMC Vehicle Operation
3.1. Description of RMC Vehicle Operation
3.2. Constituent Elements of the VSP
- a)
- Shortest route and time: a vehicle travels to all of the construction locations via the shortest distance and the entire transport process incurs the shortest time.
- b)
- Lowest cost and least number of vehicles: the entire transportation process incurs the lowest cost and the entire transportation process uses the least number of vehicles to accomplish the goal.
3.3. Design of the Experiment
- 1)
- All vehicles leaving from the dispatch center had to return to the dispatch center after completing the delivery task.
- 2)
- The construction point demand on each distribution route could not exceed the vehicle’s full load capacity.
- 3)
- The total distance of each distribution route could not exceed the vehicle’s maximum travel distance.
- 4)
- The time window for each demand point had to be met and the total operation time of the vehicle could not exceed the maximum work time.
- 5)
- The specific delivery point, delivery volume, and cost with the fastest speed from the dispatch center to the delivery point had to be known to the dispatch center before the schedule was made.
4. Simulation Results
4.1. Results from the Basic ACO Model
- a)
- Daily traffic jam during rush hour from 7:00 to 9:00 a.m. and from 5:00 to 7:00 p.m.
- b)
- The road route between two delivery points could not always be a straight line.
- c)
- The vehicle ran at a different speed if driven on a different type of road. Theoretical input for the delivery location, time windows, and delivery amounts are shown in Table 3. The coordinates unit for the delivery point was kilometers, time window unit was hours, delivery volume unit was tons, and coordinates of the dispatch center were [0,0].
4.2. Results from the Improved ACO Model
4.2.1. Volatility Factor Change from Constant to Variable Function
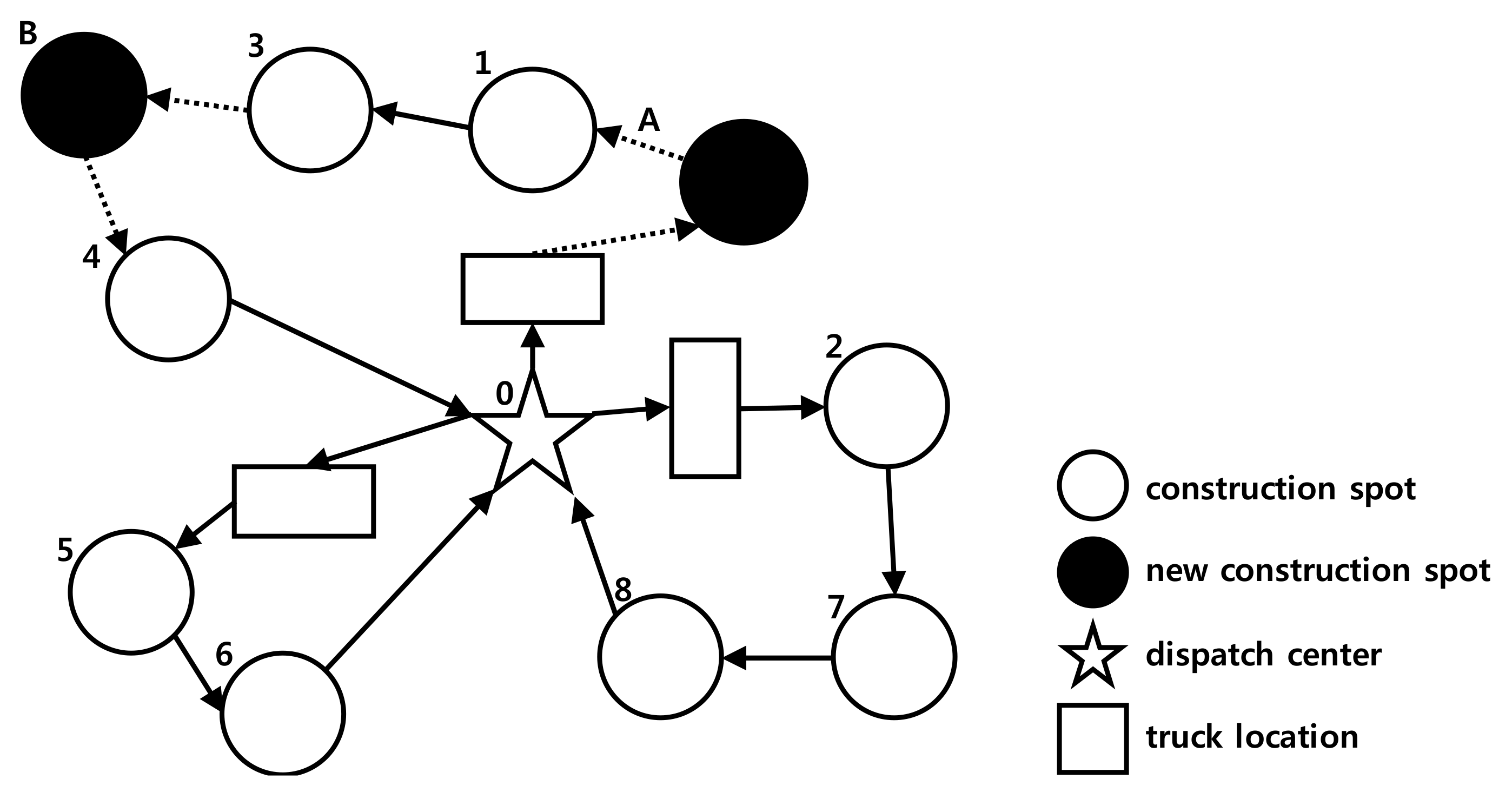
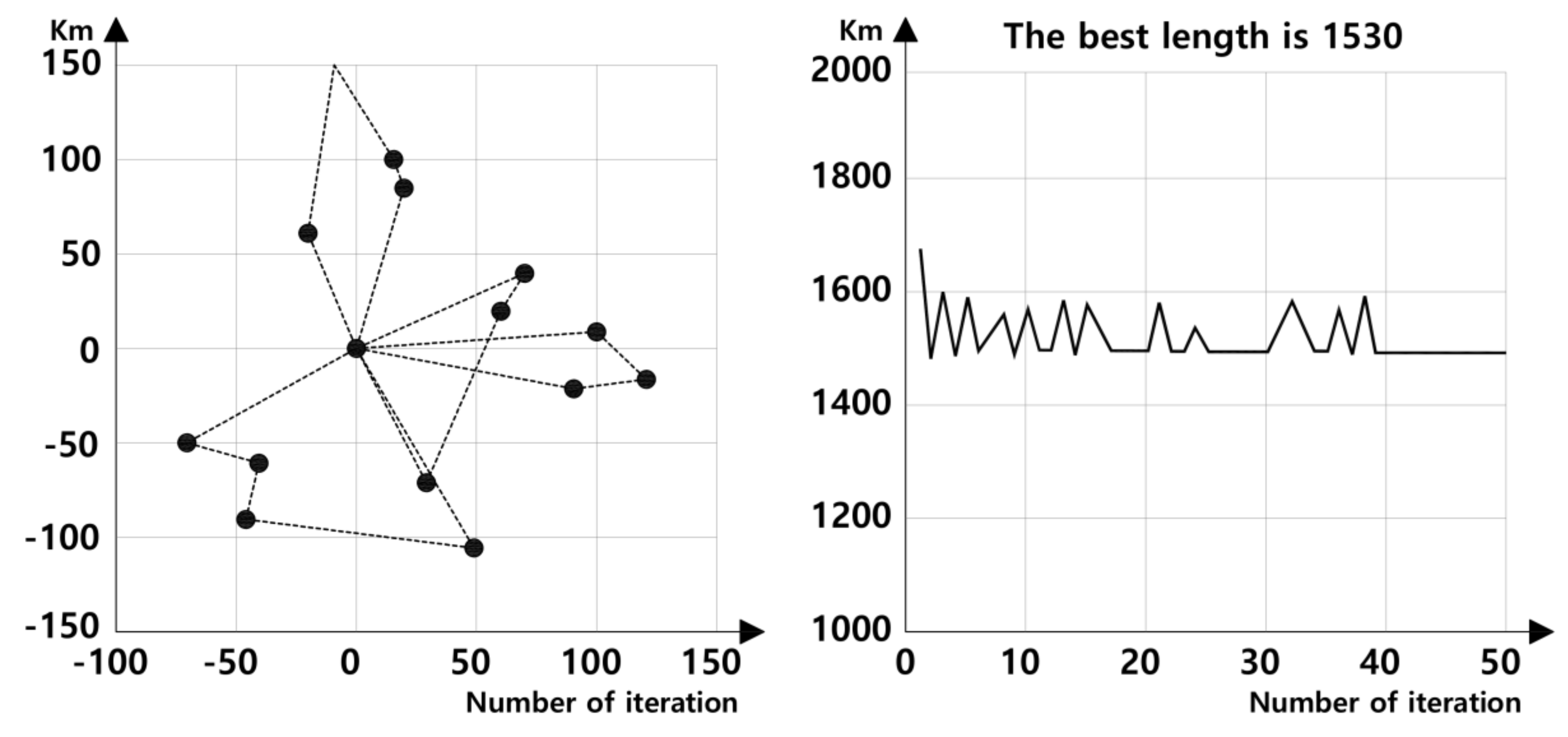
4.2.2. Introduction of the “Incentive” Mechanism
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- U.S. and World Cement Production 2017. Statistic. Available online: https://www.statista.com/statistics/219343/cement-production-worldwide (accessed on 30 April 2018).
- Ichoua, S.; Gendreau, M.; Potvin, J.-Y. Diversion issues in real-time vehicle dispatching. Transp. Sci. 2000, 34, 426–438. [Google Scholar] [CrossRef]
- Pillac, V.; Gu´eret, C.; Medaglia, A. Dynamic Vehicle Routing Problems: State of the Art and Prospects; Technical Report 10/4/AUTO; Ecole des Mines de Nantes: Nantes, France, 2011. [Google Scholar]
- Psaraftis, H.N. Dynamic vehicle routing: Status and prospects. Ann. Oper. Res. 1995, 61, 143–164. [Google Scholar] [CrossRef]
- Gendreau, M.; Guertin, F.; Potvin, J.-Y.; Taillard, E. Parallel tabu search for real-time vehicle routing and dispatching. Transp. Sci. 1999, 33, 381–390. [Google Scholar] [CrossRef]
- Hvattum, L.M.; Lokketangen, A.; Laporte, G. Solving a dynamic and stochastic vehicle routing problem with a sample scenario hedging heuristic. Transp. Sci. 2006, 40, 421–438. [Google Scholar] [CrossRef]
- Laporte, G.; Louveaux, F.; van Hamme, L. An integer l-shaped algorithm for the capacitated vehicle routing problem with stochastic demands. Oper. Res. 2002, 50, 415–423. [Google Scholar] [CrossRef]
- Haupt, R.L.; Haupt, S.E. Practical Genetic Algorithms; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Clarke, G.; Wright, J.W. Scheduling of Vehicles from a Central Depot to a Number of Delivery Points. Oper. Res. 1964, 2, 568–581. [Google Scholar] [CrossRef]
- Wren, A.; Holliday, A. Computer scheduling of vehicles from one or more depots to a number of delivery points. Oper. Res. Q. 1972, 23, 333–344. [Google Scholar] [CrossRef]
- Gendreau, M.; Hertz, A.; Laporte, G. A Tabu Search Heuristic for the Vehicle Routing Problem. Manag. Sci. 1994, 40, 1276–1290. [Google Scholar] [CrossRef]
- Dorigo, M.; Gambardella, L.M. Ant Colony System: A Cooperative Learning Approach to the Traveling Salesman Problem. IEEE Trans. Evol. Comput. 1997, 1, 53–66. [Google Scholar] [CrossRef]
- Dorigo, M.; Di Caro, G.; Gambardella, L.M. Ant Algorithms for Discrete Optimization; Artificial Life, MIT Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Dorigo, M.; Gambardella, L.M. Ant colonies for the travelling salesman problem. Biosystems 1997, 43, 73–81. [Google Scholar] [CrossRef]
- Qi, C. An Ant Colony System Hybridized with Randomized Algorithm for TSP. In Proceedings of the Eighth ACIS International Conference on Software Engineering, Artificial Intelligence, Networking, and Parallel/Distributed Computing, Qingdao, China, 30 July–1 August 2007; pp. 461–465. [Google Scholar]
- Stützle, T.; Marco, D. ACO algorithms for the traveling salesman problem. In Evolutionary Algorithms in Engineering and Computer Science; John Wiley & Sons: Hoboken, NJ, USA, 1999; pp. 163–183. [Google Scholar]
- Wei, M.; Bin, Y. Research on optimization of vehicle routing based on Hopfield neural network. In Proceedings of the 2011 IEEE 2nd International Conference on Software Engineering and Service Science (ICSESS), Beijing, China, 15–17 July 2011; pp. 157–159. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Spot Number | Download Concrete Weight (ton) | Time Window | Spot Coordinates | Spot Number | Downloaded Concrete Weight (ton) | Time Window | Spot Coordinates |
|---|---|---|---|---|---|---|---|
| 1 | 1.5 | [2, 6] | (20, 85) | 7 | 2.5 | [1.5, 8] | (120, −15) |
| 2 | 1.7 | [1, 8] | (70, 40) | 8 | 2.6 | [1.5, 6] | (90, −20) |
| 3 | 2.2 | [0, 7] | (−10, 150) | A | 1.5 | [1, 4] | (30, 70) |
| 4 | 1.5 | [2.5, 7] | (−20, 60) | B | 1.3 | [2, 6.5] | (−50, 100) |
| 5 | 1.3 | [1.5, 6] | (−45, −90) | C | 2 | [2.5, 7] | (−30, −70) |
| 6 | 2.1 | [2, 6] | (−70, −50) | D | 1.7 | [3, 8] | (60, −50) |
| Alpha (Important Factors) | Beta (Visibility Coefficient) | NC_Max (The Maximum Number of Iterations) | Q (Information Update Parameters) | W (Smaller Car Deadweight) |
|---|---|---|---|---|
| 1 | 5 | 50 | 8 | 6 |
| Delivery Point Coordinates | Time Window | Delivery Amount (ton) | Delivery Point Coordinates | Time Window | Delivery Amount (ton) | Delivery Point Coordinates | Time Window | Delivery Amount (ton) |
|---|---|---|---|---|---|---|---|---|
| (20, 85) | [2, 6] | 1.5 | (10, 150) | [0, 7] | 1.5 | (−70, −50) | [2, 6] | 1.6 |
| (70, 40) | [1, 8] | 1.7 | (−20, 60) | [2.5 ,7] | 1.4 | (30, −70) | [3, 9] | 2.7 |
| (15, 100) | [2, 9] | 1.5 | (100, −10) | [2, 10] | 2.2 | (120, −15) | [1.5, 6] | 2.5 |
| (60, 20) | [4, 7] | 3 | (−40, −60) | [3, 8] | 1.3 | (90, −20) | [1.5, 8] | 2.6 |
| (100, 10) | [2.5, 8] | 2.2 | (−45, −90) | [1.5, 6] | 2.1 | (50, −105) | [3, 10] | 2.1 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, J.; Xuelei, J.; Jeong, W. Optimizing the Construction Job Site Vehicle Scheduling Problem. Sustainability 2018, 10, 1381. https://doi.org/10.3390/su10051381
Choi J, Xuelei J, Jeong W. Optimizing the Construction Job Site Vehicle Scheduling Problem. Sustainability. 2018; 10(5):1381. https://doi.org/10.3390/su10051381
Chicago/Turabian StyleChoi, Jaehyun, Jia Xuelei, and WoonSeong Jeong. 2018. "Optimizing the Construction Job Site Vehicle Scheduling Problem" Sustainability 10, no. 5: 1381. https://doi.org/10.3390/su10051381