Container Loading Optimization in Rail–Truck Intermodal Terminals Considering Energy Consumption


School of Traffic and Transportation, Beijing Jiaotong University, Beijing 100044, China
*
Author to whom correspondence should be addressed.
Sustainability 2019, 11(8), 2383; https://doi.org/10.3390/su11082383
Submission received: 28 February 2019
/
Revised: 12 April 2019
/
Accepted: 14 April 2019
/
Published: 22 April 2019
(This article belongs to the Special Issue Intermodal Transportation and Sustainable Mobility)
Abstract
:Rail–truck intermodal terminals are an important type of dry port and play a vital role in inland freight transport. This paper addresses the container loading problem in rail–truck intermodal terminals considering energy consumption under the sustainability concept. We analyze the effect factors of energy efficiency for container loading operations and develop an optimization model to minimize the total handling time and container reshuffling. A genetic algorithm is designed to obtain the optimal container loading sequence. Computational experiments on a specific Chinese rail–truck intermodal terminal were conducted to evaluate the performance of our approach. Results show our approach has a good performance for different sizes, and the total handing time, reshuffling times and energy consumption of the handling task are prominently decreased.
1. Introduction
Intermodal freight transport involves the transportation of freight in an intermodal container or vehicle using multiple modes of transportation (e.g., rail, ship, truck) without any handling of the freight itself when changing modes. The method reduces cargo handling, and so improves security, reduces damage and loss, and allows freight to be transported faster [1]. In intermodal freight transport systems, all containers are transshipped by rail, ship and truck in intermodal terminals. The handling efficiency of the terminal significantly impacts the performance and service quality of intermodal freight transport. Therefore, most terminals focus on optimizing loading, unloading and stockpiling operations to improve efficiency.
With rapidly increasing concern about environment pollution, carbon dioxide emissions from transportation becomes a significant environmental threat. Sustainable transportation development is an important research field in sustainability, and green transportation is proposed by many countries to sustain the development of economic globalization. As key nodes of the freight transportation network, intermodal terminals have numerous heavy-duty pieces of equipment. These equipment operations can cause vast quantities of energy consumption and pollutant emission, so intermodal terminals play an important role in sustainable transportation development. Terminals have a responsibility for energy saving and emission reduction. Therefore, terminals need to consider not only handling efficiency but also energy consumption when they optimize loading, unloading and stockpiling operations.
Recently, dry ports received more concern from researchers and practitioners around the world and have a vital role in inland freight transport. The rail–truck intermodal terminal is an important kind of dry port that is configured with advanced equipment. In rail–truck intermodal transportation systems, container trains are used to transport massive quantities of containers for long distances, trucks are responsible for short distance pick-up and delivery activities, and containers are rapidly transshipped in terminals.
With the rapid development of worldwide shipping and inland freight transportation corridors, inland container transportation volume has experienced a sharp increase, which generates a higher demand for handling efficiency of rail–truck intermodal terminals. However, the current handling strategy of terminal is inefficient, which means that the equipment efficiency cannot be fully developed. Therefore, rail–truck intermodal terminals must optimize equipment utilization to improve handling efficiency, as well as considering sustainable development to reduce energy consumption. For now, containers in rail–truck intermodal terminals are mainly outbound containers, and the main handling operation is container loading. Therefore, it is necessary for rail–truck intermodal terminals to optimize container loading.
In this paper, the container loading optimization problem in rail–truck intermodal terminal is considered. We analyze the energy consumption in outbound container loading operations and determine the key factors for improving the energy efficiency. An outbound container loading optimization model is proposed by considering energy consumption and a genetic algorithm is developed to obtain an approximate optimal loading sequence. The rest of paper is organized as follows. The relevant literature is reviewed in next section. The container loading optimization problem is described in the third section and formulated in the fourth section. A genetic algorithm is developed in the fifth section. Computational results are reported in the sixth section and the final section covers the conclusion.
2. Literature Review
Intermodal transportation has been largely studied in recent literature, mainly focusing on intermodal terminal operations, intermodal transportation network design, intermodal transportation routes optimization and synchronization of operations [2,3,4]. As the core node of the intermodal transportation system, intermodal terminals provide equipment and facilities for container transfer between ship, rail and truck. Most intermodal terminal operations research has specifically focused on container ports. Literature on container port operations is multi-faceted, having addressed issues such as berth scheduling [5,6,7,8], quay crane scheduling [9,10,11,12], stowage planning and sequencing [13,14], storage activities in the yard [15,16], and allocation and dispatching of yard cranes and transporters [17,18,19]. Many corresponding models and algorithms were developed for operational planning and scheduling in container ports. As the research further develops, problem formulation became more complex as more uncertain factors are considered, and the research focus develops from one operation optimization to integrated optimization of multiple operations [20,21,22].
In contrast with container ports, specific literature on operation optimization of rail–truck intermodal terminal is relatively scarce. Although rail–truck terminals and container ports have similar transfer equipment, the specific operation procedures and rules have significant differences between these two types of intermodal terminals. To compare operations in container ports and rail–truck intermodal terminals, the most significant distinction is that the ship handling area and container yard of the container port are compressed into one handling area in rail–truck intermodal terminals. The rail-mounted gantry crane of rail–truck intermodal terminals is simultaneously responsible for loading–unloading operations and storage activities, which are separately performed by quay cranes and yard cranes in container ports. Thus, the operations related to rail-mounted gantry cranes are more complex, especially the outbound container loading operations, which need to consider container reshuffling in the loading process. Relevant research achievements in container ports cannot be directly applied in rail–truck intermodal terminals.
Recently, operation optimization of rail–truck intermodal terminals has gained more attention, and the existing literature mainly focuses on the storage space allocation problem (SSAP) and the rail-mounted gantry crane scheduling problem (RGCSP). The SSAP of inbound containers was formulated as a two-stage optimization model: first to balance the workload of inbound containers, then reducing the overlapping amounts [23]. The container assignment problem of rail–truck transshipment terminals was formulated as a two-stage optimization model for minimizing overlapping amounts and operation distance [24]. An exact solution procedure was developed to determine disjunct yard areas of varying size for multiple gantry cranes in polynomial runtime, and to ensure the workload for a given pulse of trains is equally distributed among cranes [25]. A dynamic programming approach was proposed to determine yard areas for gantry cranes to accelerate train processing speed [26]. The RGCSP was formulated as an optimization model whose objective is to determine an optimization handling sequence in order to minimize rail-mounted gantry crane idle load time in handling tasks [27]. An optimization model was proposed for the RMGC scheduling problem based on a dual cycle mode and a genetic algorithm was designed to obtain the optimization handling sequence [28].
For the study of sustainable intermodal transportation development. a multi-period mixed integer nonlinear single objective optimization problem was proposed to minimize transportation, hub location, rerouting, environmental and social costs with near optimal shipment quantities and hub allocations as the prime decisions [29]. An extensive survey for environmental sustainability in freight transportation is developed to help fill some of the gaps in the theory and to enhance practice [30]. A geospatial intermodal freight transport model was used to examine the environmental, economic, and time-of-delivery tradeoffs associated with freight transportation in the Great Lakes region and examine opportunities for marine vessels to replace a portion of heavy-duty trucks for containerized freight transport [31]. A mixed-integer mathematical programming model was presented for a multi-objective, multi-mode and multi-period sustainable load planning problem by considering import/export load flows to satisfy the transport demands of customers and many other related issues [32]. For the study on energy consumption in intermodal terminals, the yard crane (YC) scheduling problem was formulated as a mixed integer programming model whose two objectives minimize the total completion delay of all task groups and the total energy consumption of all YCs [17]. An optimal model was built with consideration of key factors such as the crane moving distance, turning distance and the practical operation rules, which are directly related to the total energy consumption [33]. The problem of integrated quay crane (QC) scheduling, internal truck (IT) scheduling and YC scheduling was formulated as a mixed integer programming model where the objective is to minimize the total departure delay of all vessels and the total transportation energy consumption of all tasks [21].
Based on the literature review above, we can draw three conclusions: (i) most existing studies focused on operations optimization in container ports, and scarce literature has focused on rail–truck intermodal terminals. Because of differences between two types of intermodal terminals in operation procedures and rules, the existing studies are hard directly apply to rail–truck intermodal terminals. (ii) The energy consumption of intermodal terminals has been the subject of much more attention in recent years, but current studies on energy consumption all focus on container ports; specific literature considering energy consumption in rail–truck intermodal terminal is scarce. (iii) In the scarce literature related to rail–truck intermodal terminals, studies only focused on improving handling efficiency and did not consider energy consumption while optimizing operations.
3. Problem Description
All outbound containers are handled in the main operation area of rail–truck intermodal terminals, which is configured with arrival–departure lines, truck operation lanes, inbound container yard, outbound container yard and rail-mounted gantry cranes. Figure 1 gives a schematic representation of the main operation area in a Chinese rail–truck intermodal terminal.
According to the length of arrival–departure lines and the number of rail-mounted gantry cranes, the main operation area is equally divided, and each rail-mounted gantry crane is responsible for a fixed area. Thus, the scope of our study is limited to one fixed handling area.
Outbound containers in rail–truck intermodal terminals can be classified into two types based on their status at different handling stages. The first type is the outbound containers brought into the terminal by trucks, abbreviated as OCT. OCT1 are allocated in the container yard and OCT2 are directly loaded onto rail vehicles. The other is outbound containers that are already in the container yard waiting to being loaded onto rail vehicles, abbreviated as OCC. Because the loading operations are only for OCT2 and OCC, the object of our study is these two types of outbound containers.
Outbound container loading operations can be described as moving from one initial loading position (container yard or truck) to a matching end position (rail vehicle), and an empty move back to the next outbound container initial loading position. An outbound container handling task is finished when all outbound containers loaded onto rail vehicles. A sample of a container loading task is shown in Figure 2.
Before the handling task begins, OCC have already been allocated in the container yard. During the handling task, OCT2 are brought into the terminal by trucks and park in the assigned space. All outbound containers have been assigned specific initial and end loading positions before they are loaded. A sample of the loading operation is shown in Figure 3.
According to the loading operations of outbound containers, the energy consumption of container loading in the terminal can be divided into loading crane energy consumption, empty crane energy consumption and reshuffling crane energy consumption. The details of energy consumption are shown in Table 1.
As observed in Table 1, the key issue for improving the energy efficiency of outbound container loading in rail–truck intermodal terminals is to reduce the empty move distance of rail-mounted gantry cranes and container reshuffling operations in the handling task. Therefore, the optimization objective of our study is to optimize the outbound container loading sequence to minimize the handling move distance and container reshuffling. Decreasing the energy consumption from empty crane movements and reshuffling crane movements can be effective in improving the energy efficiency of outbound container loading in rail–truck intermodal terminals.
4. Problem Formulation
4.1. Coordinate Frame Transforming for Handling Area
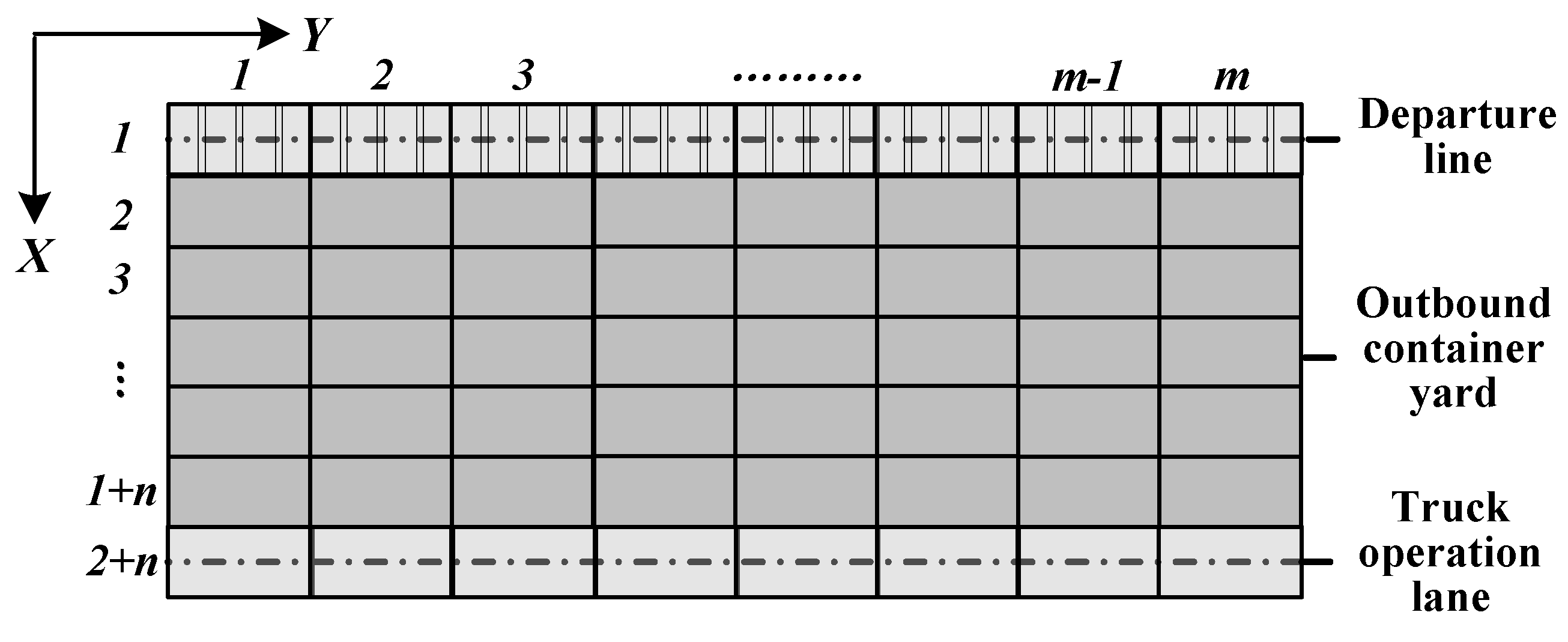
In order to expediently formulate the problem, the handling area is transformed into three-dimensional coordinates. In the X direction, the departure line, rows of the container yard and the truck operation lane are orderly encoded from 1 to 2+n; n is the number of rows in the container yard. In the Y direction, the bays of the handling area are orderly encoded from 1 to m; m is the number of bays in the container yard. Figure 4 gives an encoding example of the X/Y direction.
In the Z direction, the layers are orderly encoded from low to high. Because all handling positions in the departure line and truck operation lane have only one layer, the z-value of these positions are all 1. A sample of coordinate frame transforming is shown in Figure 5.
After coordinate frame transforming, the handling positions in the handling task are transformed into coordinate points in a three-dimensional coordinate system, and the loading operations can be depicted as movements among different points. For describing the sequential relationship of operations in the container loading task, we use moving time to replace moving distance, and the corresponding objective is to minimize whole handling time and container reshuffling in the container loading task.
4.2. A Mathematical Formulation
4.2.1. Assumptions
The following assumptions are introduced for the problem formulation:
- (i)
- Each loading operation only involves one container once.
- (ii)
- Operation positions are assumed to be known and fixed after the loading task is generated.
- (iii)
- All loading operations are non-preemptive; that is, once a loading operation starts, it must be completed without any pause or shift.
- (iv)
- The containers in the model are assumed to be of the same size.
4.2.2. Notations and Variables
The parameters and variables used for the mathematical formulations are defined in Table 2.
4.2.3. Objective Function
The objective function of the outbound container loading optimization model is written as follows:
The objective function is to minimize total handling time and container reshuffling times in the container loading task.
4.2.4. Constraints
The constraints of the outbound container loading optimization model are introduced as follows to ensure the practical feasibility of the solution:
Constraint (2) and Constraint (3) are preorder and subsequent operation constrains. Constraint (2) represents that there is at most one subsequent operation for each container loading operation. Constraint (3) represents that there is at most one preorder operation for each container loading operation. Constraint (4) indicates the continuous time relationship between two consecutive loading operations. Constraint (5) defines the reshuffling times of a task container caused by its upper container. Constraint (6) defines the relationship of two continuous handling tasks. Constraint (7) and Constraint (8) are the beginning and finishing operation constrains. They represent that the whole container loading task can only have one beginning operation and one finishing operation.
5. A Genetic Algorithm for the Problem
The outbound container loading optimization ties into the crane scheduling problem, which has been proved to be non-deterministic polynomial [34], and the formulations presented above cannot be solved exactly in a reasonable time. Therefore, we developed a genetic algorithm (GA) to obtain the approximate optimal outbound container loading sequence.
In genetic algorithm implementation, the chromosome representation and genetic operator design are two vital steps for quickly accessing the feasible space and an effective movement toward the optimal solution. The proposed genetic algorithm is illustrated in Figure 6 and the main implementation steps are elaborated as follows.
5.1. Chromosome Representation
The chromosome is designed by permutation encoding. Each chromosome represents a possible loading sequence for the outbound containers and consists of number of genes. Each gene represents a loading operation, and the value of the gene is the indices of this loading operation. The gene sequence is the loading sequence implemented from left to right.
The operation indices correlate with operation positions; one operation index has a fixed start position and finish position, and the two positions cannot be changed in GA implementation. The genetic operators are only used for the operation index.
Figure 7 shows an example of chromosome representation. The chromosome represents a handling task with five loading operations, which are handled in the sequence of .
5.2. Evaluation of Fitness Value
According to the objective function mentioned above, the fitness function can be designed as follows. The fitness value of the chromosome could be calculated based on the fitness function.
5.3. Genetic Operators Design
For the selection operator, we chose roulette wheel selection, which selects potentially useful chromosomes for recombination based on the selection probability of each individual chromosome.
5.3.1. Crossover Operator
The genes in the chromosome represent indices of all loading operations in the handling task, so the gene values cannot be lost and repeated in the offspring. To avoid infeasibility of the offspring generated, an order crossover operator is adopted. The crossover process is shown as follows.
- (i)
- Firstly, we randomly select a segment in the parents, and place the segment from one parent to the front of the other parent.
- (ii)
- In order to avoid duplication, we scan the offspring from left to right and delete the repeated gene values in the substring.
- (iii)
- The crossover operation is finished when the offspring generated by the order crossover operator are both feasible.
A sample of the crossover operation is shown in Figure 8.
5.3.2. Mutation Operator
As mentioned above, for ensuring the integrity of the handling tasks, missing and duplicating gene values must be forbidden in the offspring. Thus, an inversion mutation operator is used. The operator randomly picks two mutation points in the chromosome and then inverts the gene values of the mutation points. This mutation operator can guarantee the generation of a feasible chromosome. A sample of this mutation operation is shown in Figure 9.
5.4. Stopping Criterion
The algorithm iteration will stop when the iterative times meet the specified value. Then, the best individual from the current population will be reported as the final solution.
6. Computational Experiments
To verify the proposed approach for container loading optimization, several experiments were performed. Computational experiments are applied to the data from a specific Chinese rail–truck intermodal terminal. For evaluating the performance of our approach, a comparison is made between our approach and the current approach applied in rail–truck intermodal terminals. The current approach is straightforward and does not involve any optimization techniques. The outbound containers are orderly loaded onto rail vehicles from left to right in the departure line. Furthermore, to further evaluate the performance of our approach, experiments on different sample sizes are conducted.
The details of the specific rail–truck intermodal terminal are depicted as follows. One departure line can stop 120 rail vehicles for twenty-foot equivalent units. The outbound container yard has three rows and 120 bays, and the maximum layer number is two. There are four rail-mounted gantry cranes in the main operation area, and each crane is responsible for 30 bays. The maximum amount of loading operations in one handling task is 30. A handling task with a task size of 30 is shown in Table 3.
For the computational sample above, experiments are conducted for 100 independent runs. Based on the preliminary tests, the algorithm parameters are set as follows: population size is 50, crossover rate is 0.95, mutation rate is 0.15, and the maximum number of generations is 200. Then, we chose empty move time and reshuffling times as evaluation indicators, and made a comparison between our approach and the current approach. The comparison results are shown in Table 4.
There are five GAP shown in Table 4. GAP a shows the optimization of the total handling time between our approach and the current approach. GAP b shows the optimization of the reshuffling times between our approach and the current approach. GAP c shows the optimization of the total energy consumption between our approach and the current approach. GAP d presents the percentage of empty move energy consumption in total energy consumption. GAP e presents the percentage of reshuffling energy consumption in total energy consumption. These GAP are calculated as follows.
In Table 4, the total energy consumption , energy consumption of an empty move and energy consumption of reshuffling , are calculated as follows:
where is the power consumption per hour of crane usage and is the average power consumption per reshuffling. In this paper, is set at 300 kW/h and is set at 15 kW.
As observed in Table 4, the GAP of total handling time is 7.1% and the GAP of reshuffling times is 60%. The reshuffling times obtained by our approach result from the overlapping of upper containers, which do not belong to the same handling task. The reshuffling operations caused by the overlapping between containers in the same handling task are optimized by our approach. Our approach observably reduces the total handling time and container reshuffling times in the outbound container loading process. There is a 22% decrease in total energy consumption after loading optimization by our approach.
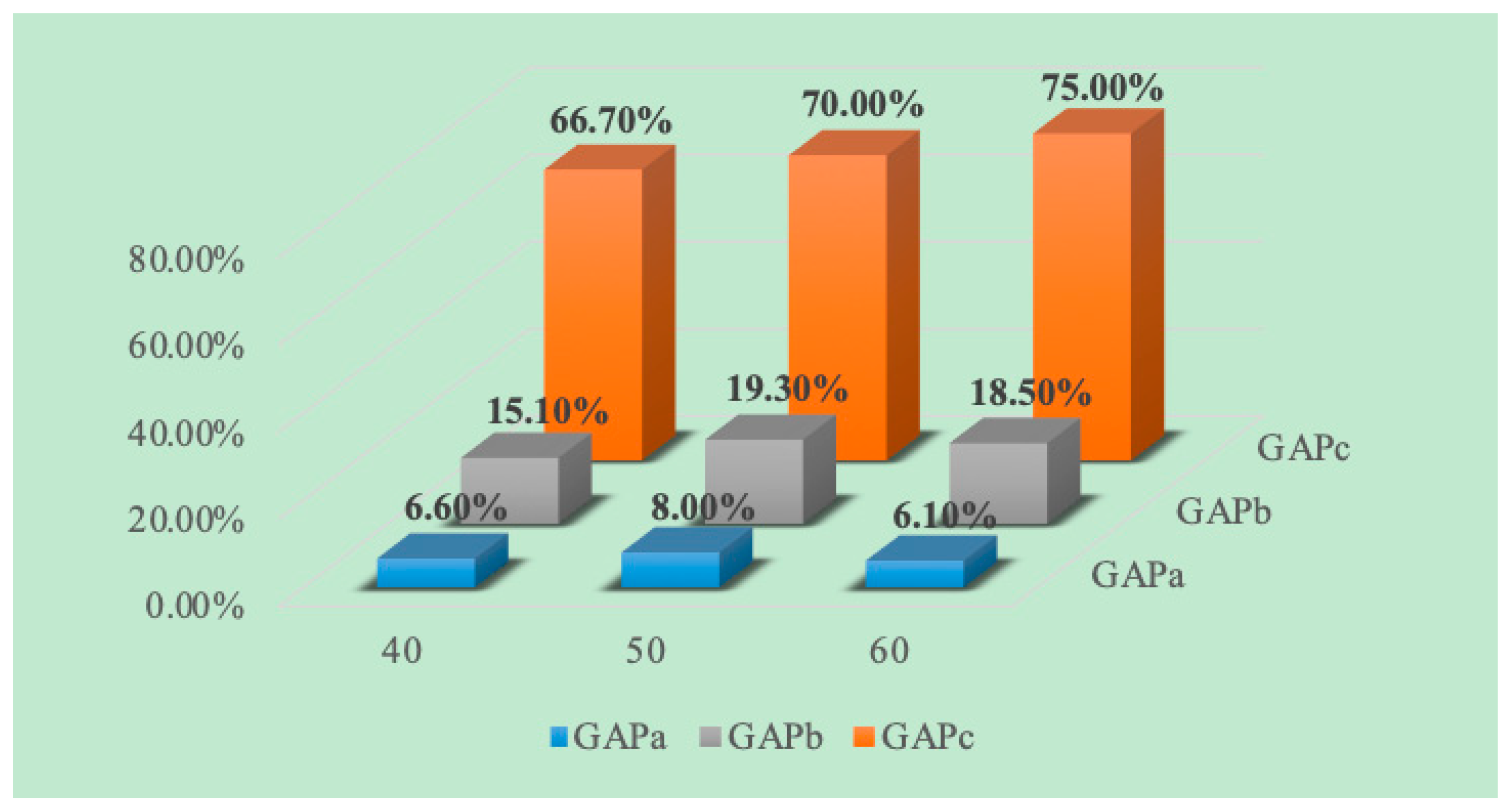
In order to further evaluate the performance of our approach, experiments on different sample sizes are conducted. In general, there are 2–4 rail-mounted gantry cranes in the main operation area of this Chinese rail–truck intermodal terminal. Therefore, the quantitative range of loading operations in one handling task is from 30 to 60. In this range, computational experiments are carried out to verify the effectiveness of our approach for different sample sizes. For each task size, experiments are implemented for 100 independent runs. The results are shown in Table 5.
As observed in Table 5, handling tasks with different sample sizes can be solved in a short time. The total computational time is about 1–2 minutes to generate a loading sequence for a container train combined with 120 rail vehicles, which can meet the actual scheduling requirements in rail–truck intermodal terminals. In Figure 10, based on optimizing the outbound container loading sequence, the total handling time, reshuffling times and energy consumption of the handling task are decreased.
Based on the experimental results mentioned above, our approach is different from previous studies from a sustainability perspective, as we consider not only improving handling efficiency, but also reducing energy consumption in container loading operation optimization. The high energy efficiency of operations in rail–truck intermodal terminals is significant for sustainable development of freight transportation and contribute to energy conservation and emission reduction.
7. Conclusions
The container loading optimization problem in rail–truck intermodal terminals was considered in this paper. By analyzing the energy consumption of loading operations in the terminal, the key issue to improve the energy efficiency of outbound container loading in rail–truck intermodal terminals was to optimize the loading sequence for reducing the energy consumption from empty crane movements and reshuffling crane movements. An optimization model was presented to minimize total handling time and container reshuffling times in container loading tasks. Based on a GA, computational experiments on data from a specific rail–truck intermodal terminal in China were implemented. The results showed that optimizing the loading sequence can significantly reduce the total handling time, reshuffling times and energy consumption, and had a good performance for different sizes. The proposed approach can be useful and practical to help the operators in rail–truck intermodal terminals make an outbound container loading plan.
The limitations of our paper are as follows. First, we only consider direct energy consumption in container loading operations, and do not consider the influence from indirect energy consumption. Second, the current model is formulated under a specific environment, and do not consider the uncertain factors in container loading operations.
In the future, the influence of indirect energy consumption needs to be analyzed in detail and container loading optimization should consider uncertain factors to make the study more realistic.
Author Contributions
Conceptualization, L.W. and X.Z.; Methodology, L.W.; Software, L.W.; Validation, L.W.; Formal Analysis, L.W.; Investigation, L.W.; Resources, L.W.; Data Curation, L.W.; Writing—Original Draft Preparation, L.W.; Writing—Review and Editing, L.W. and X.Z.; Visualization, L.W.; Supervision, L.W.; Project Administration, L.W. and X.Z.; Funding Acquisition, L.W. and X.Z.
Funding
This work was supported by the National Key R&D Program of China (grant number 2018YFB1201403), the Fundamental Research Funds for the Central Universities (grant number 2018JBM028).
Acknowledgments
The authors are grateful to the reviewers for their valuable and meaningful comments.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Munim, Z.H.; Haralambides, H. Competition and cooperation for intermodal container transhipment: A network optimization approach. Res. Transp. Bus. Manag. 2018, 26, 87–99. [Google Scholar] [CrossRef]
- Dong, C.; Boute, R.; Mckinnon, A.; Verelst, M. Investigating synchromodality from a supply chain perspective. Transp. Res. Part. D. Transp. Environ. 2018, 61, 42–57. [Google Scholar] [CrossRef] [Green Version]
- Giusti, R.; Iorfida, C.; Li, Y.; Menerba, D. Sustainable and de-stressed international supply-chains through the SYNCHRO-NET approach. Sustainability 2019, 11, 1083. [Google Scholar] [CrossRef]
- Ambra, T.; Caris, A.; Macharis, C. Towards freight transport system unification: Reviewing and combining the advancements in the physical internet and synchromodal transport research. Int. J. Prod. Res. 2018, 47, 1606–1623. [Google Scholar] [CrossRef]
- Golias, M.; Boile, M.; Theofanis, S.; Efstathiou, C. The berth-scheduling problem. Transp. Res. Rec. J. Transp. Res. Board 2010, 2166, 20–27. [Google Scholar] [CrossRef]
- Golias, M.; Portal, I.; Konur, D.; Kaisar, E.; Kolomvos, G. Robust berth scheduling at marine container terminals via hierarchical optimization. Comput. Oper. Res. 2014, 41, 412–422. [Google Scholar] [CrossRef]
- Bierwirth, C.; Meisel, F. A follow-up survey of berth allocation and quay crane scheduling problems in container terminals. Eur. J. Oper. Res. 2015, 244, 675–689. [Google Scholar] [CrossRef]
- Iris, C.; Christensen, J.; Pacino, D.; Ropke, S. Flexible ship loading problem with transfer vehicle assignment and scheduling. Transp. Res. Part B Methodol. 2018, 111, 113–134. [Google Scholar] [CrossRef]
- Ying, X.; Dong-Ping, S. Optimal planning for container prestaging, discharging, and loading processes at seaport rail terminals with uncertainty. Transp. Res. Part E 2018, 119, 88–109. [Google Scholar]
- Iris, C.; Pacino, D.; Ropke, S.; Larsen, A. Integrated berth allocation and quay crane assignment problem: Set partitioning models and computational results. Transp. Res. Part E Logist. Transp. Rev. 2015, 81, 75–97. [Google Scholar] [CrossRef]
- Wang, J.J.; Hu, H.; Song, Y.B. Optimization of quay crane scheduling constrained by stability of vessels. Transp. Res. Rec. J. Transp. Res. Board 2013, 2330, 47–54. [Google Scholar] [CrossRef]
- Goodchild, A.V.; Daganzo, C.F. Double-cycling strategies for container ships and their effect on ship loading and unloading operations. Transp. Sci. 2006, 40, 473–483. [Google Scholar] [CrossRef]
- Ding, D.; Chou, M.C. Stowage planning for container ships: A heuristic algorithm to reduce the number of shifts. Eur. J. Oper. Res. 2015, 246, 242–249. [Google Scholar] [CrossRef]
- Kim, K.H.; Kim, H.B. Segregating space allocation models for container inventories in port container terminals. Int. J. Prod. Econ. 1999, 59, 415–423. [Google Scholar]
- Lee, D.H.; Jin, J.G.; Chen, J.H. Schedule template design and storage allocation for cyclically visiting feeders in container transshipment hubs. Transp. Res. Rec. J. Transp. Res. Board 2012, 87–95. [Google Scholar] [CrossRef]
- Lee, D.H.; Cao, Z.; Chen, J.; Cao, J. Load scheduling of multiple yard crane systems in container terminal with buffer areas. Transp. Res. Rec. J. Transp. Res. Board 2009, 2097, 70–77. [Google Scholar] [CrossRef]
- He, J.L.; Huang, Y.F.; Yan, W. Yard crane scheduling in a container terminal for the trade-off between efficiency and energy consumption. Adv. Eng. Inform. 2015, 29, 59–75. [Google Scholar] [CrossRef]
- Nathan, H. Reducing truck turn times at marine terminals with appointment scheduling. Transp. Res. Rec. J. Transp. Res. Board 2009, 2100, 47–57. [Google Scholar]
- Lee, D.H.; Jin, J.; Chen, J. Integrated bay allocation and yard crane scheduling problem for transshipment containers. Transp. Res. Rec. J. Transp. Res. Board 2011, 2222, 63–71. [Google Scholar] [CrossRef]
- Meisel, F.; Bierwirth, C. A framework for integrated berth allocation and crane operations planning in seaport container terminals. Transp. Sci. 2013, 47, 131–147. [Google Scholar] [CrossRef]
- He, J.; Huang, Y.; Yan, W.; Shuaian, W. Integrated internal truck, yard crane and quay crane scheduling in a container terminal considering energy consumption. Expert Syst. Appl. 2015, 42, 2464–2487. [Google Scholar] [CrossRef]
- Wang, L.; Zhu, X.N.; Xie, Z.Y. Storage space allocation of inbound container in railway container terminal. Math. Probl. Eng. 2014, 2014, 1–10. [Google Scholar] [CrossRef]
- Wang, L.; Zhu, X.N.; Xie, Z.Y. Container assignment optimization considering overlapping amount and operation distance in rail-road transshipment terminal. Adv. Prod. Eng. Manag. 2017, 12, 363–374. [Google Scholar] [CrossRef] [Green Version]
- Boysen, N.; Fliedner, M. Determining crane areas in intermodal transshipment yards: The yard partition problem. Eur. J. Oper. Res. 2010, 24, 336–342. [Google Scholar] [CrossRef]
- Boysen, N.; Fliedner, M.; Kellner, M. Determining fixed crane areas in rail–rail transshipment yards. Transp. Res. Part E Logist. Transp. Rev. 2010, 46, 1005–1016. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Zhu, X.N. Rail mounted gantry crane scheduling optimization in railway container terminal based on hybrid handling mode. Comput. Intell. Neurosci. 2014, 2014, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Zhu, X.N.; Xie, Z.Y. Rail mounted gantry crane scheduling in rail-truck transshipment terminal. Intell. Autom. Soft Comput. 2016, 22, 61–73. [Google Scholar] [CrossRef]
- Lee, D.H.; Wang, Q.; Miao, L. Quay crane scheduling with non-interference constraints in port container terminals. Transp. Res. Part E Logist. Transp. Rev. 2008, 44, 124–135. [Google Scholar] [CrossRef]
- Lohithaksha, M.M.; Jitesh, J.T. Modelling and analysis of intermodal food grain transportation under hub disruption towards sustainability. Int. J. Prod. Econ. 2018. [Google Scholar] [CrossRef]
- Ellram, M. Environmental sustainability in freight transportation: A systematic literature review and agenda for future research. Transp. J. 2017, 56, 263. [Google Scholar] [CrossRef]
- Comer, B. Sustainable Intermodal Freight Transportation: Applying the Geospatial Intermodal Freight Transport Model. Master’s Thesis, Rochester Institute of Technology, Rochester, NY, USA, November 2009. Available online: https://gradworksonline.com/gradworks/#/ (accessed on 1 April 2019).
- Baykaso, L.A.; Subulan, K. A multi-objective sustainable load planning model for intermodal transportation networks with a real-life application. Transp. Res. Part E Logist. Transp. Rev. 2016, 95, 207–247. [Google Scholar] [CrossRef]
- Sha, M.; Zhang, T.; Lan, Y.; Xin, Z. Scheduling optimization of yard cranes with minimal energy consumption at container terminals. Comput. Ind. Eng. 2017, 13, 704–713. [Google Scholar] [CrossRef]
- Chung, S.H.; Choy, K.L. A modified genetic algorithm for quay crane scheduling operations. Expert Syst. Appl. 2012, 39, 4213–4221. [Google Scholar] [CrossRef]
Figure 1.
Schematic representation of the main operation area.

Figure 2.
A sample of a container loading task.

Figure 3.
A sample of loading operation.

Figure 4.
An encoding example of the X/Y direction.

Figure 5.
A sample of coordinate frame transforming.

Figure 6.
Flow digram of the genetic algorithm (GA).

Figure 7.
A sample of chromosome representation.

Figure 8.
A sample of the crossover operation.

Figure 9.
A sample of the mutation operation.

Figure 10.
GAP for different sample sizes.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Details of energy consumption.
| Energy consumption | Description |
|---|---|
| Loading crane energy consumption | This aspect is generated by the loading crane moving from the container yard or trucks to rail vehicles. Because all outbound containers have specific handling positions, the loading crane energy consumption is a fixed value in one handling task. In general, this kind of energy consumption is determined and never changed after the handling task is generated. |
| Empty crane energy consumption | This aspect is generated by the empty crane moving between two outbound container loading operations. This energy consumption is determined by the outbound container handling sequence. Different handling sequences have a great influence on empty crane energy consumption, so optimizing the handling sequence can directly reduce this kind of energy consumption and improve energy efficiency of outbound container loading operations. |
| Reshuffling crane energy consumption | This aspect is generated by container reshuffling operations in the loading process. According to the different status of the upper container, reshuffling crane energy consumption can be divided into two types. In the first type, the upper container does not belong to the same handling task, so it must be reshuffled to ensure the handling task can go on smoothly. This type of energy consumption is unavoidable. The other type is caused by the overlapping of containers in the same handling task, and this type of energy consumption can be reduced or avoided by optimizing the handling sequence. |
Table 2.
Notations and variables.
| Parameter | Number of handling tasks | |
| Maximum layer number of the container yard | ||
| Indices of the handling task | ||
| Row indices of operation positions | ||
| Bay indices of operation positions | ||
| Layer indices of operation positions | ||
| Indices of operation positions | ||
| Time conversion coefficient of container reshuffling | ||
| The empty move time from task to task | ||
| A sufficiently large constant | ||
| Set | The set of loading operations | |
| The set of operation positions | ||
| Variables | Start time of task from to | |
| Finish time of task from to | ||
| 1, if task immediately begins after task has finished; 0, otherwise. 1. Tasks S and T are considered to be the initial and finish status, Thus, when task is the first task, . When task is the last task, | ||
| Reshuffling times of task caused by its th upper container | ||
| 0, if task begins earlier than task ; 1, otherwise. is the starting position of task , and is the starting position of task |
Table 3.
Container loading task with a sample size of 30.
| Operation Index | Container Type | Initial Position | End Position | Operation Index | Container Type | Initial Position | End Position |
|---|---|---|---|---|---|---|---|
| 1 | OCC | (3,2,1) | (1,1,1) | 16 | OCT2 | (5,13,1) | (1,16,1) |
| 2 | OCC | (4,1,1) | (1,2,1) | 17 | OCC | (3,17,1) | (1,17,1) |
| 3 | OCC | (2,5,2) | (1,3,1) | 18 | OCC | (4,14,2) | (1,18,1) |
| 4 | OCC | (3,8,1) | (1,4,1) | 19 | OCC | (3, 22,1) | (1,19,1) |
| 5 | OCT2 | (5,4,1) | (1,5,1) | 20 | OCC | (2,21,1) | (1,20,1) |
| 6 | OCC | (4,4,1) | (1,6,1) | 21 | OCC | (3,21,2) | (1,21,1) |
| 7 | OCC | (2,5,1) | (1,7,1) | 22 | OCC | (4,27,1) | (1,22,1) |
| 8 | OCC | (2,9,2) | (1,8,1) | 23 | OCC | (4,22,1) | (1,23,1) |
| 9 | OCC | (4,5,1) | (1,9,1) | 24 | OCC | (2,24,2) | (1,24,1) |
| 10 | OCC | (2,10,2) | (1,10,1) | 25 | OCT2 | (5,25,1) | (1,25,1) |
| 11 | OCC | (3,8,2) | (1,11,1) | 26 | OCC | (2,24,1) | (1,26,1) |
| 12 | OCT2 | (5,12,1) | (1,12,1) | 27 | OCC | (4,22,2) | (1,27,1) |
| 13 | OCC | (4,14,1) | (1,13,1) | 28 | OCC | (2,27,1) | (1,28,1) |
| 14 | OCC | (2,11,1) | (1,14,1) | 29 | OCC | (3,29,1) | (1,29,1) |
| 15 | OCC | (3,9,2) | (1,15,1) | 30 | OCC | (4,27,2) | (1,30,1) |
Table 4.
Comparison results between our approach and the current approach.
| GAP a | GAP b | GAP c | GAP d | GAP e | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Our Approach(OA) | 68.3 | 2 | 153 | 30 | 371.5 | 7.1% | 60% | 16.1% | 41.2% | 8.1% |
| Current Approach(CA) | 73.5 | 5 | 179 | 75 | 442.5 |
Notes: is total handling time, is reshuffling times, is total energy consumption, is energy consumption of an empty move, is energy consumption of reshuffling. a, b, c, d, e are the indices of GAP.
Table 5.
Performance for different sample sizes.
| Sample Size | Our Approach | Current Approach | GAP a | GAP b | GAP c | |||
|---|---|---|---|---|---|---|---|---|
| Total Handling Time (min) | Reshuffling Times | Average CPU time (s) | Total Handling Time (min) | Reshuffling Times | ||||
| 40 | 102.4 | 2 | 15.9 | 109.6 | 6 | 6.6% | 66.7% | 15.1% |
| 50 | 124.7 | 3 | 24.7 | 135.5 | 10 | 8.0% | 70.0% | 19.3% |
| 60 | 154.3 | 3 | 37.4 | 164.2 | 12 | 6.1% | 75.0% | 18.5% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Wang, L.; Zhu, X. Container Loading Optimization in Rail–Truck Intermodal Terminals Considering Energy Consumption. Sustainability 2019, 11, 2383. https://doi.org/10.3390/su11082383
AMA Style
Wang L, Zhu X. Container Loading Optimization in Rail–Truck Intermodal Terminals Considering Energy Consumption. Sustainability. 2019; 11(8):2383. https://doi.org/10.3390/su11082383
Chicago/Turabian StyleWang, Li, and Xiaoning Zhu. 2019. "Container Loading Optimization in Rail–Truck Intermodal Terminals Considering Energy Consumption" Sustainability 11, no. 8: 2383. https://doi.org/10.3390/su11082383
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.