Multi-Species Assessment of Injury, Mortality, and Physical Conditions during Downstream Passage through a Large Archimedes Hydrodynamic Screw (Albert Canal, Belgium)


 , , and
, , and
Abstract
:
1. Introduction
2. Study Site and Turbine Description
3. Materials and Methods
3.1. Data Collection
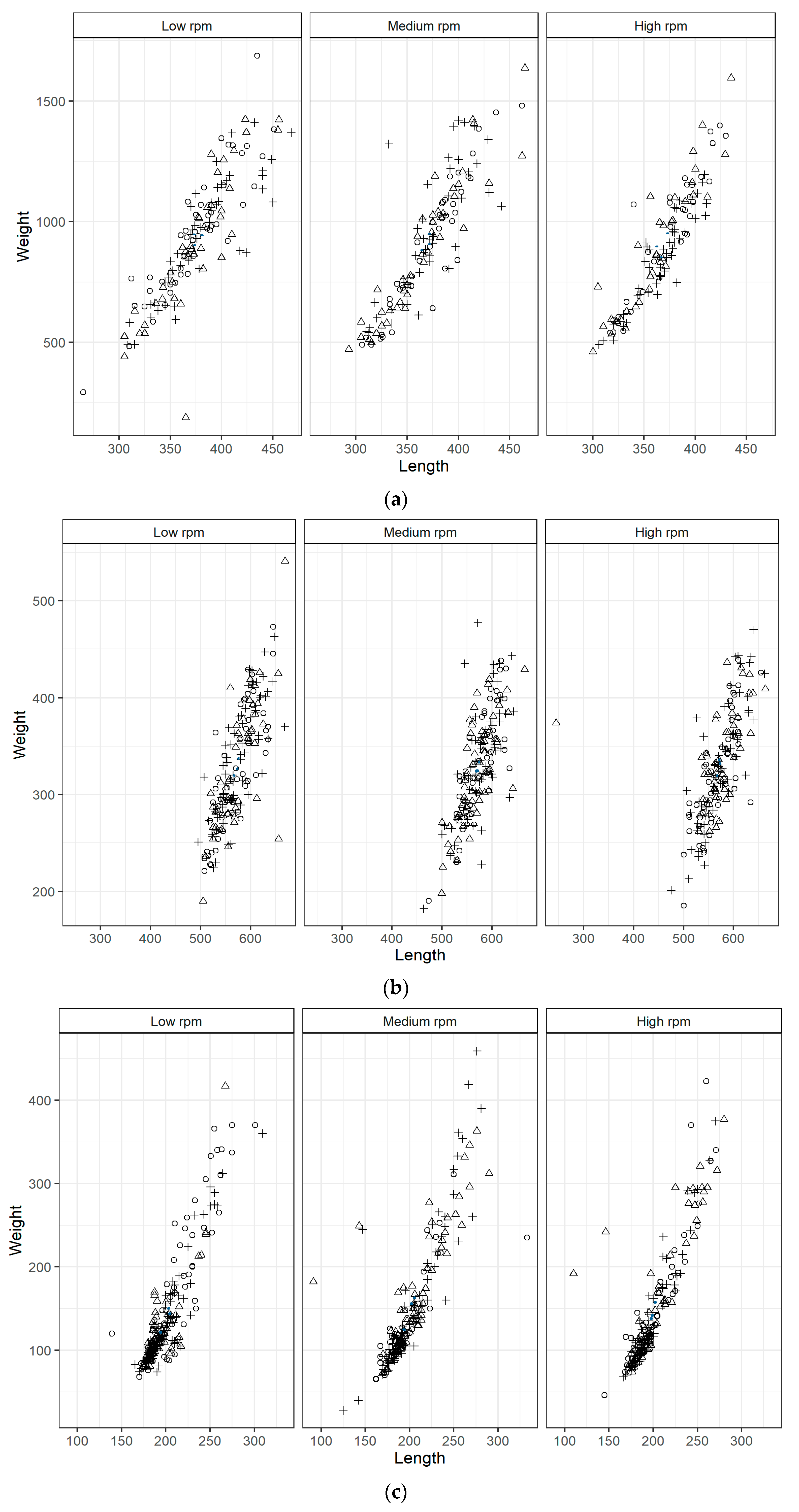
3.1.1. Fish
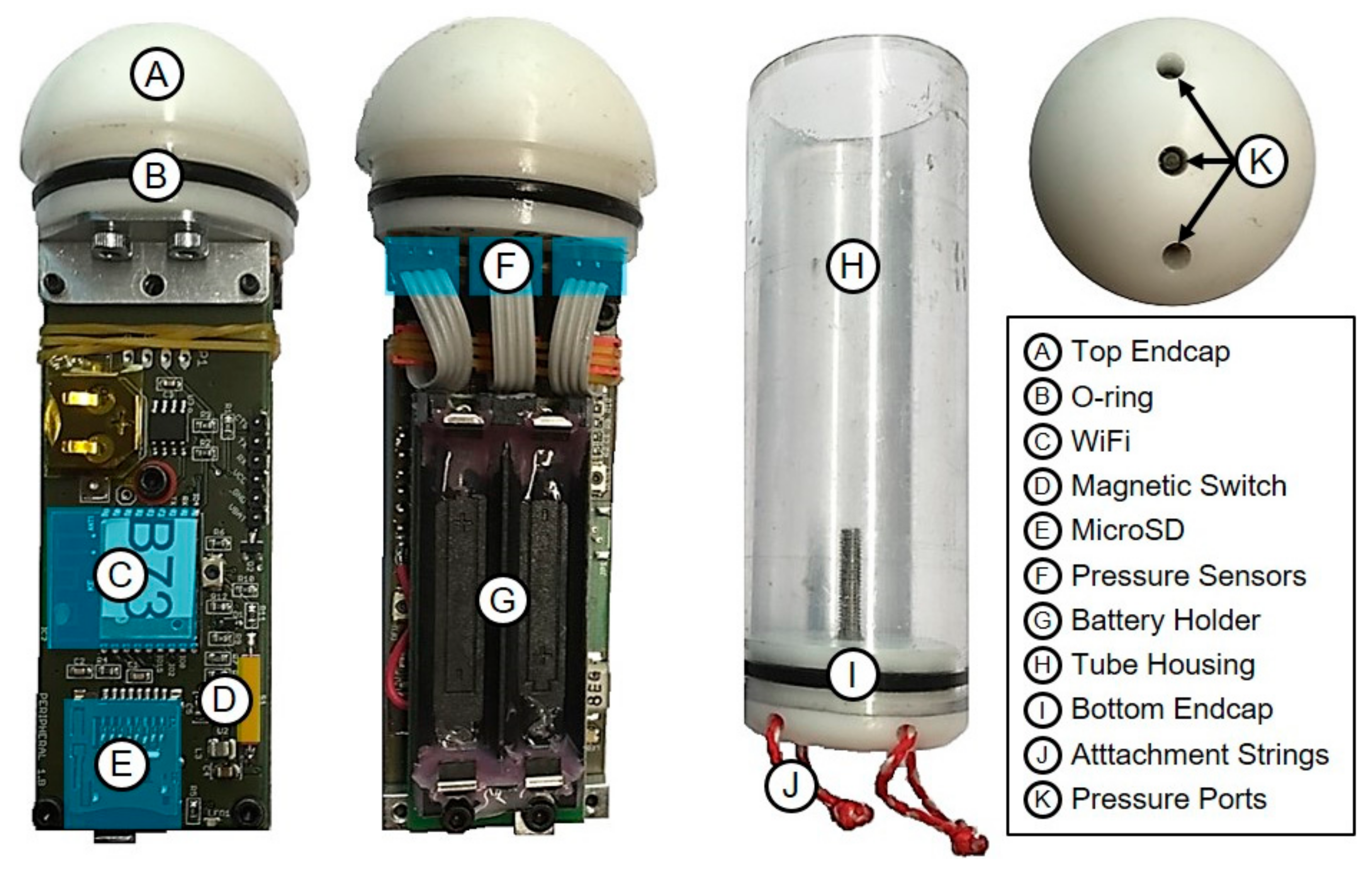
3.1.2. Barotrauma Detection Sensors
3.2. Data Analysis
3.2.1. Fish
3.2.2. Barotrauma Detection System Sensors
4. Results
4.1. Fish
4.1.1. Mortality Rates
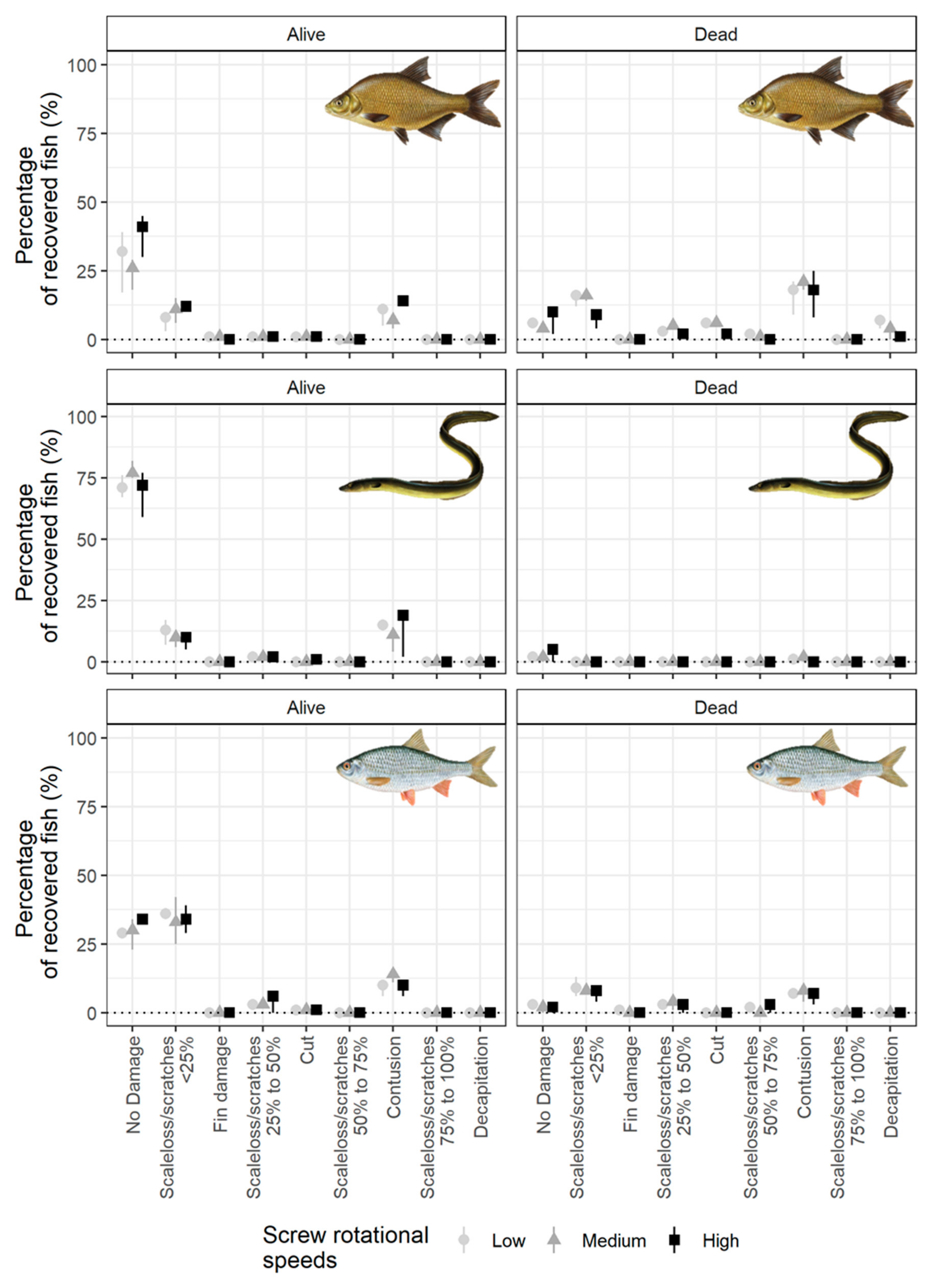
4.1.2. Injury
4.2. Barotrauma Detection System Sensors
4.2.1. Pressure Passage Metrics
4.2.2. Impact Events and Kinetic Energy Metrics
4.3. Summary of Statistically Significant Results from Live Fish and Sensors
5. Discussion
5.1. Fish Mortality and Injury and Their Relation to the Physical Conditions Experienced
5.2. The Role of Operational Scenarios
5.3. Weaknesses of the Present Study and Benefits for Future Research
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Ethics Approval
Appendix A


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Statistical Test | Factors | Null Hypothesis | Chi-Squared (χ2) | Sample Size (N) | Degrees of Freedom | p-Value |
| Cochran–Mantel–Haenszel 1 | Bream-eel | Odds ratios are equal | 219.72 | 916 | 1 | <0.001 |
| Bream-roach | 71.02 | 1028 | 1 | <0.001 | ||
| Eel-roach | 66.10 | 1184 | 1 | <0.001 | ||
| Chi-squared 2 | Species | Observed and expected frequencies are equal | 254.37 | 1564 | 2 | <0.001 |
| Operational scenarios | 1.71 | 1564 | 2 | 0.43 | ||
| Species operational scenarios | 86.32 | 1564 | 8 | <0.001 | ||
| Statistical test | Factors | Residuals | p-Values | |||
| Post-Hoc Bonferroni 3 | Bream | −14.08 | <0.001 | |||
| Eel | 12.57 | <0.001 | ||||
| Roach | 0.22 | 1.00 | ||||
| Bream–low | −5.27 | <0.001 | ||||
| Bream–medium | −5.25 | <0.001 | ||||
| Bream–high | −1.97 | 0.86 | ||||
| Eel–low | 3.59 | 0.01 | ||||
| Eel–medium | 3.24 | 0.02 | ||||
| Eel–high | 3.47 | 0.01 | ||||
| Roach–low | −0.29 | 1.00 | ||||
| Roach–medium | 0.02 | 1.00 | ||||
| Roach-high | 0.89 | 1.00 | ||||
| Statistical Test | Factors | Chi-Squared (χ2) | Sample Size (N) | Degrees of Freedom | p-Value | |||
| Chi-squared 1 | Species | 285.68 | 1564 | 4 | <0.001 | |||
| Operational scenarios | 3.41 | 1564 | 4 | 0.49 | ||||
| Species operational scenarios | 91.05 | 1564 | 16 | <0.001 | ||||
| Statistical Test | Factors | Residuals | p-Value | |||||
| No injury | Slight injury | Severe injury | No injury | Slight injury | Severe injury | |||
| Post-Hoc Bonferroni 2 | Bream | <0.01 | <0.01 | <0.001 | ||||
| Eel | <0.001 | <0.001 | <0.001 | |||||
| Roach | 1.00 | <0.001 | <0.001 | |||||
| Bream–low | 1.00 | 1.00 | 0.04 | |||||
| Bream–medium | 0.51 | 1.00 | 0.02 | |||||
| Bream–high | 1.00 | 1.00 | 1.00 | |||||
| Eel–low | 0.01 | 1.00 | 0.55 | |||||
| Eel–medium | 0.00 | 0.58 | 0.16 | |||||
| Eel–high | 0.02 | 0.50 | 1.00 | |||||
| Roach–low | 0.11 | 0.01 | 1.00 | |||||
| Roach–medium | 0.56 | 0.44 | 1.00 | |||||
| Roach-high | 1.00 | 0.05 | 1.00 | |||||
References
- Waters, S.; Aggidis, G.A. Over 2000 years in review: Revival of the Archimedes Screw from Pump to Turbine. Renew. Sustain. Energy Rev. 2015, 51, 497–505. [Google Scholar] [CrossRef] [Green Version]
- Lashofer, A.; Hawle, W.; Pelikan, B. State of technology and design guidelines for the Archimedes screw turbine. In Proceedings of the Hydro 2012—Innovative Approaches to Global Challenges, Bilbao, Spain, 1 October 2012. [Google Scholar]
- Quaranta, E.; Revelli, R. Gravity water wheels as a micro hydropower energy source: A review based on historic data, design methods, efficiencies and modern optimizations. Renew. Sustain. Energy Rev. 2018, 97, 414–427. [Google Scholar] [CrossRef]
- Lubitz, W.D.; Lyons, M.; Simmons, S. Performance model of Archimedes screw hydro turbines with variable fill level. J. Hydraul. Eng. 2014, 140, 1–11. [Google Scholar] [CrossRef]
- Hogan, T.W.; Cada, G.F.; Amaral, S.V. El estado de las turbinas hidroeléctricas ambientalmente mejoradas. Fisheries 2014, 39, 164–172. [Google Scholar] [CrossRef]
- Schmalz, W. Untersuchungen zum Fischabstieg und Kontrolle möglicher Fischschäden durch die Wasserkraftschnecke an der Wasserkraftanlage Walkmühle an der Werra in Meiningen—Abschlussbericht; FLUSS: Schleusingen, Germany, 2010. [Google Scholar]
- Kibel, P. Fish Monitoring and Live Fish Trials. Archimedes Screw Turbine, River Dart. Phase 1; Fishtek Consulting Ltd.: Devon, UK, 2007. [Google Scholar]
- Kibel, P. Archimedes screw turbine fisheries assessment Phase II Eels Kelts. Aquacult Eng. 2008, 1, 297–310. [Google Scholar]
- Piper, A.T.; Rosewarne, P.J.; Wright, R.M.; Kemp, P.S. The impact of an Archimedes screw hydropower turbine on fish migration in a lowland river. Ecol. Eng. 2018, 118, 31–42. [Google Scholar] [CrossRef]
- Brackley, R.; Bean, C.; Lucas, M.; Thomas, R.; Adams, C. Assessment of scale-loss to Atlantic salmon (Salmo salar L.) smolts from passage through an archimedean screw turbine. In Proceedings of the the 11th ISE 2016, Melbourne, Australia, 7–12 February 2016. [Google Scholar]
- Brackley, R.; Lucas, M.C.; Thomas, R.; Adams, C.E.; Bean, C.W. Comparison of damage to live v. euthanized Atlantic salmon Salmo salar smolts from passage through an Archimedean screw turbine. J. Fish Biol. 2018, 92, 1635–1644. [Google Scholar] [CrossRef] [Green Version]
- Kibel, P.; Pike, R.; Coe, T. The Archimedes Screw Turbine: Assessment of Three Leading Edge Profiles; Fishtek Consulting Ltd.: Devon, UK, 2009. [Google Scholar]
- Lyons, M.; Lubitz, W.D. Archimedes screws for microhydro power generation. In Proceedings of the ASME 2013 7th International Conference on Energy Sustainability Collocated with the ASME 2013 Heat Transfer Summer Conference and the ASME 2013 11th International Conference on Fuel Cell Science, Engineering and Technology, ES 2013, Minneapolis, MI, USA, 14–19 July 2013. [Google Scholar]
- Bracken, F.S.A.; Lucas, M.C. Potential impacts of small-scale hydroelectric power generation on downstream moving lampreys. River Res. Appl. 2013, 29, 1073–1081. [Google Scholar] [CrossRef] [Green Version]
- Havn, T.B.; Sæther, S.A.; Thorstad, E.B.; Teichert, M.A.K.; Heermann, L.; Diserud, O.H.; Borcherding, J.; Tambets, M.; Økland, F. Downstream migration of Atlantic salmon smolts past a low head hydropower station equippped with Archimedes screw and Francis turbines. Ecol. Eng. 2017, 105, 262–275. [Google Scholar] [CrossRef]
- Fu, T.; Deng, Z.D.; Duncan, J.P.; Zhou, D.; Carlson, T.J.; Johnson, G.E.; Hou, H. Assessing hydraulic conditions through Francis turbines using an autonomous sensor device. Renew. Energy 2016, 99, 1244–1252. [Google Scholar] [CrossRef] [Green Version]
- Deng, Z.; Carlson, T.J.; Duncan, J.P.; Richmond, M.C.; Dauble, D.D. Use of an autonomous sensor to evaluate the biological performance of the advanced turbine at Wanapum Dam. J. Renew. Sustain. Energy 2010, 2, 1–12. [Google Scholar] [CrossRef]
- Deng, Z.; Guensch, G.R.; McKinstry, C.A.; Mueller, R.P.; Dauble, D.D.; Richmond, M.C. Evaluation of fish-injury mechanisms during exposure to turbulent shear flow. Can. J. Fish. Aquat. Sci. 2005, 62, 1513–1522. [Google Scholar] [CrossRef]
- Boys, C.A.; Pflugrath, B.D.; Mueller, M.; Pander, J.; Deng, Z.D.; Geist, J. Physical and hydraulic forces experienced by fish passing through three different low-head hydropower turbines. Mar. Freshw. Res. 2018, 69, 1934–1944. [Google Scholar] [CrossRef]
- Čada, G.F. The Development of Advanced Hydroelectric Turbines to Improve Fish Passage Survival. Fisheries 2001, 26, 14–23. [Google Scholar] [CrossRef]
- PIANC. Final Report of the International Commission for the Study of Waves; PIANC: Brussels, Belgium, 1986; Volume 3. [Google Scholar]
- Verhelst, P.; Baeyens, R.; Reubens, J.; Benitez, J.P.; Coeck, J.; Goethals, P.; Ovidio, M.; Vergeynst, J.; Moens, T.; Mouton, A. European silver eel (Anguilla anguilla L.) migration behaviour in a highly regulated shipping canal. Fish. Res. 2018, 206, 176–184. [Google Scholar] [CrossRef] [Green Version]
- Kemper, J.H.; Vis, H. Sonaronderzoek naar het visbestand in het Albertkanaal in het Vlaamse Gewest; ATKB: Nieuwegein, The Netherlands, 2010. [Google Scholar]
- Visser, E.C.; Kroes, M.J. Onderzoek Naar Het Visbestand in Het Albertkanaal 2012–2015. Available online: https://www.kroes-consultancy.nl/onderzoek-naar-visbestand-albertkanaal-2012-2015/ (accessed on 21 October 2020).
- Vergeynst, J.; Pauwels, I.; Baeyens, R.; Coeck, J.; Nopens, I.; De Mulder, T.; Mouton, A. The impact of intermediate-head navigation locks on downstream fish passage. River Res. Appl. 2019, 35, 224–235. [Google Scholar] [CrossRef]
- Vergeynst, J. Downstreameel and Salmon Migration through a Shipping Canal: Challenges on the Road; Ghent University (UGhent) and Research Institute for Nature and Forets (INBO): Gent, Belgium, 2020. [Google Scholar]
- Buysse, D.; Mouton, A.M.; Stevens, M.; Van den Neucker, T.; Coeck, J. Mortality of European eel after downstream migration through two types of pumping stations. Fish. Manag. Ecol. 2014, 21, 13–21. [Google Scholar] [CrossRef]
- Buysse, D.; Mouton, A.M.; Baeyens, R.; Coeck, J. Evaluation of downstream migration mitigation actions for eel at an Archimedes screw pump pumping station. Fish. Manag. Ecol. 2015, 22, 286–294. [Google Scholar] [CrossRef]
- Mueller, M.; Pander, J.; Geist, J. Evaluation of external fish injury caused by hydropower plants based on a novel field-based protocol. Fish. Manag. Ecol. 2017, 24, 240–255. [Google Scholar] [CrossRef] [Green Version]
- Lin, Z.; Xiong, Y.; Dai, H.; Xia, X. An Experimental Performance Evaluation of the Orientation Accuracy of Four Nine-Axis MEMS Motion Sensors. In Proceedings of the the 5th International Conference on Enterprise Systems: Industrial Digitalization by Enterprise Systems, Beijing, China, 22–24 September 2017; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2017; pp. 185–189. [Google Scholar]
- Kriewitz-Byun, C.R.; Tuhtan, J.A.; Toming, G.; Albayrak, I.; Kammerer, S.; Vetch, D.F.; Peter, A.; Stoltz, U.; Gabl, W.; Marbacher, D. Research Overview on Multi-Species Downstream Migration Measures at the Fithydro Test Case HPP Bannwil. In Proceedings of the the 12th International Symposium on Ecohydraulics (ISE 2018), Tokyo, Japan, 19–24 August 2018. [Google Scholar]
- Agresti, A. An Introduction to Categorical Data Analysis, 2nd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1996; ISBN 978-0-471-22618-5. [Google Scholar]
- R Development Core Team. R: A Language and Environment for Statistical Computing; R Development Core Team: Vienna, Austria, 2011; Volume 1, p. 409. [Google Scholar]
- Boys, C.A.; Robinson, W.; Miller, B.; Pflugrath, B.; Baumgartner, L.J.; Navarro, A.; Brown, R.; Deng, Z. A piecewise regression approach for determining biologically relevant hydraulic thresholds for the protection of fishes at river infrastructure. J. Fish Biol. 2016, 88, 1677–1692. [Google Scholar] [CrossRef]
- Pflugrath, B.D.; Boys, C.A.; Cathers, B.; Deng, Z.D. Over or under? Autonomous sensor fish reveals why overshot weirs may be safer than undershot weirs for fish passage. Ecol. Eng. 2019, 132, 41–48. [Google Scholar] [CrossRef] [Green Version]
- Bodily, K.G.; Carlson, S.J.; Truscott, T.T. The water entry of slender axisymmetric bodies. Phys. Fluids 2014, 26, 072108. [Google Scholar] [CrossRef]
- Haehnel, R.B.; Daly, S.F. Maximum Impact Force of Woody Debris on Floodplain Structures; Hanover: Vicksburg, MS, USA, 2002. [Google Scholar]
- Madgwick, S.O.H.; Harrison, A.J.L.; Vaidyanathan, R. Estimation of IMU and MARG orientation using a gradient descent algorithm. In Proceedings of the IEEE International Conference on Rehabilitation Robotics Rehab Week Zurich, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–7. [Google Scholar]
- Alexander, A.; Kruusmaa, M.; Tuhtan, J.A.; Hodson, A.J.; Schuler, T.V.; Kääb, A. Pressure and inertia sensing drifters for glacial hydrology flow path measurements. Cryosphere 2020, 14, 1009–1023. [Google Scholar] [CrossRef] [Green Version]
- The Mathworks, Inc. MATLAB, Version 9.6, 2019 MATLAB. Available online: https://www.mathworks.com/ (access on 21 Octorber 2020).
- Brown, R.S.; Colotelo, A.H.; Pflugrath, B.D.; Boys, C.A.; Baumgartner, L.J.; Deng, Z.D.; Silva, L.G.M.; Brauner, C.J.; Mallen-Cooper, M.; Phonekhampeng, O.; et al. Sobre el barotrauma en peces durante su tránsito por hidro-estructuras: Una estrategia global para el desarrollo sustentable de los recursos hídricos. Fisheries 2014, 39, 108–122. [Google Scholar] [CrossRef]
- Egg, L.; Mueller, M.; Pander, J.; Knott, J.; Geist, J. Improving European Silver Eel (Anguilla anguilla) downstream migration by undershot sluice gate management at a small-scale hydropower plant. Ecol. Eng. 2017, 106, 349–357. [Google Scholar] [CrossRef]
- Bevelhimer, M.S.; Pracheil, B.M.; Fortner, A.M.; Saylor, R.; Deck, K.L. Mortality and Injury Assessment for Three Species of Fish Exposed to Simulated Turbine Blade Strike. Can. J. Fish. Aquat. Sci. 2019, 76, 2350–2363. [Google Scholar] [CrossRef]
- Al-saati, N.H. Archimedean Screw Pumps—Definitions; Al-Furat Al-Awsat Technical University: Najaf, Iraq, 2017. [Google Scholar]
- Baumgartner, L.J.; Daniel Deng, Z.; Thorncraft, G.; Boys, C.A.; Brown, R.S.; Singhanouvong, D.; Phonekhampeng, O. Perspective: Towards environmentally acceptable criteria for downstream fish passage through mini hydro and irrigation infrastructure in the Lower Mekong River Basin. J. Renew. Sustain. Energy 2014, 6, 012301. [Google Scholar] [CrossRef] [Green Version]
- Baeyens, R.; Pauwels, I.; Buysse, D.; Mouton, A.; Vergeynst, J.; Papadopoulos, I.; Demaerteleire, N.; Pieters, S.; Gelaude, E.; Robberechts, K.; et al. Monitoring van de effecten van de pompinstallatie en waterkrachtcentrale te Ham op het visbestand in het Albertkanaal; Reports from the Research Institute for Nature and Forest: Brussels, Belgium, 2019. [Google Scholar]
- Saylor, R.; Fortner, A.; Bevelhimer, M. Quantifying mortality and injury susceptibility for two morphologically disparate fishes exposed to simulated turbine blade strike. Hydrobiologia 2019, 842, 55–75. [Google Scholar] [CrossRef]





| Screw Parameters | Abbreviations Indicated in Figure 2 | Value |
|---|---|---|
| Maximum power (MW) | - | 1.2 |
| Centre tube length (m) | L | 23.8 |
| Helix length (m) | Lb | 21.5 |
| Slope (°) | β | 38 |
| Number of blades | - | 3 |
| Helix lead (m) | Ld | 4.3 |
| Centre tube diameter (m) | d | 2.4 |
| Helix diameter (m) | D | 3.1 |
| Helix operation (rpm/Hz/m3/s) | - | 13.71/33/3 16.62/40/4 19.95/48/5 |
| Gap between helix and housing (cm) | - | ±2 cm |
| Fish deterrence system | - | None |
| Fish injury reduction measures | - | None |
| Rotation Speeds of Operation | Species | Number of Fish Tested | Number of Fish Recovered (% Total) | ||||
|---|---|---|---|---|---|---|---|
| Test 1 | Test 2 | Test 3 | Test 1 | Test 2 | Test 3 | ||
| Low | Bream | 100 | 100 | 100 | 49 | 47 | 40 |
| Medium | Bream | 100 | 100 | 100 | 46 | 42 | 41 |
| High | Bream | 100 | 100 | 100 | 46 | 35 | 34 |
| Low | Eel | 100 | 100 | 100 | 68 | 63 | 51 |
| Medium | Eel | 100 | 100 | 100 | 65 | 59 | 55 |
| High | Eel | 100 | 100 | 100 | 64 | 57 | 54 |
| Low | Roach | 100 | 100 | 100 | 100 | 71 | 64 |
| Medium | Roach | 100 | 100 | 100 | 78 | 72 | 59 |
| High | Roach | 100 | 100 | 100 | 74 | 66 | 65 |
| Operational Scenario (Table 1) | Number of Sensors Deployed | Number of Useful Datasets (% Total) | Number of Crushed Sensors (% Total) | Number of Scratched Sensors (% Total) | Passage Duration (min) Mean ± SD (Range) |
|---|---|---|---|---|---|
| Low (30 Hz) | 45 | 30 (67) | 4 (9) | 9 (20) | 75 ± 25 (41–165) |
| Medium (40 Hz) | 39 | 28 (72) | 3 (8) | 13 (33) | 51 ± 19 (30–137) |
| High (48 Hz) | 40 | 33 (83) | 1 (3) | 3 (8) | 42 ± 10 (19–69) |
| Pressure-Based Metric | Low rpm Mean ± SD (Range) | Medium rpm Scenario Mean ± SD (Range) | High rpm Scenario Mean ± SD (Range) | High Power 1 Mean ± SD (Range) | Low Power 1 Mean ± SD (Range) |
|---|---|---|---|---|---|
| Nadir (kPa) | 99.6 ± 1.1 (97.1–101.5) | 99.1 ± 1.9 (93.5–101.3) | 98.9 ± 1.8 (94.7–103.4) | 100.1 ± 4.2 (95.1–111.3) | 98.5 ± 5.3 (81.8–106.6) |
| Maximum (kPa) | 122.4 ± 11.8 (106.7–149.3) | 122.3 ± 9.5 (110.6–146.9) | 118.7 ± 7.8 (108.0–143.7) | 116.7 | 116.7 |
| Minimum RPC | 1.00 ± 0.01 (0.98–1.03) | 1.01 ± 0.02 (0.99–1.07) | 1.01 ± 0.02 (0.97–1.06) | 0.99 ± 0.04 (0.94–1.10) | 0.98 ± 0.05 (0.81–1.06) |
| Maximum absolute pressure gradient (kPa) | 8.96 ± 6.31 (1.73–29.66) | 10.96 ± 4.06 (3.92–18.39) | 9.52 ± 5.73 (2.67–31.80) | Not measured | Not measured |
| Subject | Data | Factors | Operational Scenario | ||
|---|---|---|---|---|---|
| Low (33 Hz) | Medium (40 Hz) | High (48 Hz) | |||
| Live Fish | Mortality data | No species | |||
| Bream | D ** (Pos.) | D ** (Pos.) | |||
| Eel | D ** (Neg.) | D * (Neg.) | D ** (Neg.) | ||
| Roach | |||||
| Injury data | No species | ||||
| Bream | Se * (Pos.) | Se * (Pos.) | |||
| Eel | N ** (Pos.) | N ** (Pos.) | N ** (Pos.) | ||
| Roach | Sl ** (Pos.) | Sl * (Pos.) | |||
| BDS Sensors | Nadir pressure Pressure maximum RPC | ||||
| Maximum Absolute Pressure gradient | * | ||||
| Change in the kinetic energy of translation | * | ||||
| Change in rotational kinetic energy | |||||
| Sensor housing | * (Pos.) | * (Neg.) | |||
| IMU-Based Metric | Low 33 Hz Mean ± SD (Range) | Medium 40 Hz Mean ± SD (Range) | High 48 Hz Mean ± SD (Range) |
|---|---|---|---|
| 1.22 ± 0.95 (0.21–4.52) | 1.81 ± 1.31 (0.43–6.48) | 1.32 ± 1.15 (0.26–4.60) | |
| 0.63 ± 0.27 (0.15–1.24) | 0.64 ± 0.21 (0.22–1.19) | 0.62 ± 0.28 (0.22–1.56) | |
| Percentage of BDS with large impacts, >5 g (%) | 33.3 | 66.7 | 54.6 |
| Mean duration to first Large impact, >5 g (s) | 13.41 ± 10.93 (2.22–32.79) | 12.87 ± 5.99 (2.97–24.22) | 8.19 ± 7.05 (0.01–20.94) |
| Percentage of mean passage duration until first large impact, >5 g (%) | 34 ± 26.7 (7.6–80.6) | 42.2 ± 21.3 (10–80.6) | 36.5 ± 31.5 (0–42.6) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pauwels, I.S.; Baeyens, R.; Toming, G.; Schneider, M.; Buysse, D.; Coeck, J.; Tuhtan, J.A. Multi-Species Assessment of Injury, Mortality, and Physical Conditions during Downstream Passage through a Large Archimedes Hydrodynamic Screw (Albert Canal, Belgium). Sustainability 2020, 12, 8722. https://doi.org/10.3390/su12208722
Pauwels IS, Baeyens R, Toming G, Schneider M, Buysse D, Coeck J, Tuhtan JA. Multi-Species Assessment of Injury, Mortality, and Physical Conditions during Downstream Passage through a Large Archimedes Hydrodynamic Screw (Albert Canal, Belgium). Sustainability. 2020; 12(20):8722. https://doi.org/10.3390/su12208722
Chicago/Turabian StylePauwels, Ine S., Raf Baeyens, Gert Toming, Matthias Schneider, David Buysse, Johan Coeck, and Jeffrey A. Tuhtan. 2020. "Multi-Species Assessment of Injury, Mortality, and Physical Conditions during Downstream Passage through a Large Archimedes Hydrodynamic Screw (Albert Canal, Belgium)" Sustainability 12, no. 20: 8722. https://doi.org/10.3390/su12208722