
Moving Ad Hoc Networks—A Comparative Study




1
Department of Computer Engineering, Dongseo University, 47 Jurye-Ro, Sasang-Gu, Busan 47011, Korea
2
Department of Smart Computing, Kyungdong University, 46 4-gil, Gosung, Gangwon-do, Bongpo 24764, Korea
3
Division of Computer Engineering, Dongseo University, 47 Jurye-Ro, Sasang-Gu, Busan 47011, Korea
*
Author to whom correspondence should be addressed.
Sustainability 2021, 13(11), 6187; https://doi.org/10.3390/su13116187
Submission received: 27 March 2021
/
Revised: 14 May 2021
/
Accepted: 18 May 2021
/
Published: 31 May 2021
(This article belongs to the Special Issue Machine Learning and AI Technology for Sustainability)
Abstract
:An ad hoc network is a wireless mobile communication network composed of a group of mobile nodes with wireless transceivers. It does not rely on preset infrastructure and is established temporarily. The mobile nodes of the network use their own wireless transceivers to exchange information; when the information is not within the communication range, other intermediate nodes can be used to relay to achieve communication. They can be widely used in environments that cannot be supported by wired networks or which require communication temporarily, such as military applications, sensor networks, rescue and disaster relief, and emergency response. In MANET, each node acts as a host and as a router, and the nodes are linked through wireless channels in the network. One of the scenarios of MANET is VANET; VANET is supported by several types of fixed infrastructure. Due to its limitations, this infrastructure can support some VANET services and provide fixed network access. FANET is a subset of VANET. SANET is one of the common types of ad hoc networks. This paper could serve as a guide and reference so that readers have a comprehensive and general understanding of wireless ad hoc networks and their routing protocols at a macro level with a lot of good, related papers for reference. However, this is the first paper that discusses the popular types of ad hoc networks along with comparisons and simulation tools for Ad Hoc Networks.
1. Introduction
In recent years, wireless networks have developed very rapidly in supporting mobility. According to whether the mobile communication system has infrastructure, mobile wireless networks can be divided into two categories. The first type is a network with infrastructure. The mobile node realizes communication using the nearest base station within the communication range. In such a network, a mobile node is equivalent to a mobile terminal. It does not have routing functions, and only mobile switches are responsible for the routing and switching functions. Typical examples of this type of network are cellular wireless systems, office wireless LANs, and so on.
The second type is a mobile network without infrastructure (Figure 1). It is an autonomous wireless multi-hop network. The entire network has no fixed infrastructure or fixed routers. All the nodes are mobile and can dynamically maintain contact with other nodes in any way. In this environment, due to the limited wireless coverage of the terminal, two user terminals that cannot communicate directly can forward packets with the help of other nodes. Each node can be said to be a router, and they must be able to discover and maintain routes to other nodes.
Ad hoc literally means “for this purpose” in Latin. An ad hoc network is also known as a local area network (LAN), which connects the nodes with each other spontaneously without relying on any centralized (Base Station) wireless networks. In an ad hoc network, we can set up a wireless connection where all the device nodes (Computers) communicate with each other directly to exchange information without any Wi-Fi, router, or access point within 100 m of each other. Because of the node mobility, the ad hoc network does not have any fixed topology. However, if a node in the ad hoc network wants to send a message to another node, there should be another node to act as a router to forward the message to the intended node.
The objective of this work is to present and explain the current direction and status of the research on the popular types of wireless ad hoc network family (Figure 1).
In wireless ad hoc networks, routing refers to the act of transferring information from a source to a destination through the network. The routing protocol is a protocol for the implementation of routing and a mechanism for sharing routing information between routers. It allows routers to exchange routing information and maintain their own routing tables. The routing protocol works at the network layer and is responsible for collecting data about the current state of the network, and for finding the optimal transmission path. Based on these data, the router can create and maintain a routing table for future data packet forwarding. Because the mutual communication between the nodes in the wireless ad hoc network is achieved through multi-hop routing, and this multi-hop communication method must rely on the design of the routing protocol, the routing protocol is an indispensable part of the wireless ad hoc network; its design method and implementation principle play an extremely important role in the performance of the network.
The major significance of the work is as follows: it briefly introduces a series of basic concepts and basic knowledge of wireless ad hoc networks, mainly including the definition, classification, characteristics, applications and development of wireless ad hoc networks, and examples of some typical wireless ad hoc networks, as well as the basis of wireless ad hoc network routing protocols, so that readers have a comprehensive and general understanding of wireless ad hoc networks and their routing protocols at a macro level with a lot of good, related papers for reference. No prior work has considered such a comparison to the best of our knowledge.
However, with the development of wireless communication technology, the types of networks have gradually become an important research topic for wireless networks, and many related studies and applications have emerged.
The manuscript is structured as follows. In Section 2, a Mobile Ad Hoc Network is presented. Section 3 presents the Vehicular Ad hoc Network. In Section 4, the Flying Ad Hoc Network is presented. The Sea Ad hoc Network is presented in Section 5. In Section 6, we present the MVFS Ad Hoc Networks comparison. In the last section, the work is concluded, and future work is defined.
However, there are many specific types of wireless ad hoc networks, and the following will give a specific concept to these wireless ad hoc networks.
2. Mobile Ad-Hoc Network (MANET)
In MANET, nodes/devices can move independently and freely in all directions. MANET does not have any infrastructure (base station) where each node in the network acts as a router. The routers are free to move randomly and organize themselves. Therefore, the wireless network topology may change unpredictably and frequently. For example, Figure 2 represents a mobile ad hoc network where we have four devices that can communicate with each other. The first device can communicate with all other devices (Devices 2, 3, 4, and 5), but if another device wants to communicate with other devices (for example Devices 2 and 4 or Devices 3 and 5) they must route through Device 1.
- (a)
- Characteristics of MANET:
- Dynamic network topologies: The nodes can move freely and independently in any direction. The network topology may change randomly at any time (Figure 3).
- Multi-hop: Each node acts as a host and as a router in which the nodes are linked through wireless channels in the network. The message goes through multiple nodes from the sender to the receiver due to the bounded transmission radius.
- Limited battery power: Wireless has a finite bandwidth and the nodes have limited battery power. Therefore, power conservation is a substantial design optimization condition.
- Temporary and rapidly deployable: The network does not have any infrastructure (base station). In nature, this network is temporary. The nodes are rapidly deployable; for instance, when the nodes are in the transmission ring, they make an ad hoc network.
- Infrastructure-less, distributed, and self-organizing: There is no centralized control; due to unreliable links, MANET relies upon the collaboration of the participating nodes.
- Scalability: Because of the limitation of power and memory on the nodes, scalability is an issue when we consider a large network size.
- Low Bandwidth: This wireless network has a shorter transmission range than the fixed infrastructure network. Therefore, its communication is lower than wired communication due to the impact of fading, interference, noise, and multiple accesses.
- (b)
- Advantages and applications of MANET:
- It has more flexibility.
- It has better mobility.
- The network can be set up at any time.
- It is more economical.
- It can provide access to geographical position information and services.
There are several applications for MANET:
- The local-level.
- The communication sector.
- The military battlefield.
- Personal area networks.
- Business associates.
- Information exchange when network infrastructure is destroyed, etc.
- (c)
- MANET routing protocols classification.
MANET is the primary use for a wireless ad hoc network. In MANET, other participating nodes randomly move in the created wireless ad hoc network. Because the communication link between the two devices changes from time to time, it is very difficult to create a MANET for devices to move dynamically in the network. However, to manage the content change of the route traffic, the main challenge of building a MANET is suspended.
Most of the research focuses on routing and link connectivity. To evaluate the performance of this type of network, capacity and throughput are good metrics. MANET routing protocol classification is separated into three types, as shown in Figure 4. Table 1 shows a summary of the existing surveys in MANET.
Due to decentralization and mobility, MANETs have a lot of issues and challenges.
- Routing,
- Bandwidth-limited wireless range,
- Energy,
- Dynamic topology-induced changes in routes,
- Security threats,
- Mobility-induced packets may be lost,
- Limited battery life,
- Scalability problems,
- Routing overheating.
3. Vehicular Ad-Hoc Networks (VANET)
Media players, Global Positioning Systems (GPS), smartphones, and Bluetooth are some of the networks that allow intravehicular wireless communication between electronic gadgets and vehicles in most modern cars. However, the vehicle’s communications network is not yet available. Vehicular ad hoc network technology is emerging to provide inter-vehicular communication VANET is interpreted as a part of MANET, with the following differences: the nodes that you can use here are vehicles. Consequently, the movement of nodes, i.e., the movement of the vehicle, is restricted. However, VANET supports some fixed infrastructure. Due to its limitations, this infrastructure can support some VANET services and provide fixed network access.
- (a)
- Architecture of VANETs.
The VANET network may be deployed by communication operators, content service providers or government agencies, and jointly deployed by them to form a wireless communication network with a hybrid architecture. According to the definition of the European Car Communication Consortium (C2C-CC), the VANET architecture has been extended to a wider range, divided into in-vehicle communication (the in-vehicle domain), workshop communication (the ad-hoc domain) and vehicle-to-road communication (the infrastructure domain). In-vehicle communication (In-vehicle) is the communication between the On-Board Unit (OBU) and the user terminal. The user terminal can be a specific device, or a virtual module integrated into the OBU. The connection mode can be wired or wireless. Workshop communication (ad-hoc domain) includes communication between OBUs (V2V), and communication between OBUs and RSUs (V2R) (Figure 5). The communication mode can be single-hop or multi-hop. Vehicle-to-road communication (the infrastructure domain) with Dedicated Short-Range Communication (DSRC) [10] is the communication between the OBU, RSU and infrastructure, such as satellites, Hot Spots, 3G and 4G, etc., to complete the function of accessing the Internet. For RSU, the connection can be wired [11].
In terms of standardization, DSRC is a technical standard developed for ITS mainly in the field of ITS (such as electronic toll collection systems, ETC). The International Organization for Standardization Intelligent Transportation System Committee ISO/TC204 is responsible for the formulation of DSRC international standards. There are three major camps in the international DSRC standard formulation: Europe, the United States, and Japan [12]. The ninth working group of the European DSRC standardization working group CEN/TC278 started the drafting of the DSRC standard in 1994 and passed ENV12253 “5.8 GHz DSRC physical layer” in 1997, ENV12795 “DSRC data link layer”, and the ENN12834 “DSRC application layer” standard. In 1997, the TC204 Committee of the Japanese DSRC Standardization Working Group completed the DSRC standard formulation work. In 2001 and 2004, they issued two standards, ARIB STD-T75 and ARIB STD-T88, respectively. In 1998, the US Federal Communications Commission allocated the 5.850~5.925 GHz (75 MHz) frequency band to short-range communications in the field of transportation services [13]. ASTM passed the DSRC standard E2213-02 in 2002 and passed its improved standard E2213-03 in 2003. The standard E2213-03, the IEEE 802.11p and IEEE 1609 working groups began to formulate wireless communication standards in the vehicle environment. In 2006, the IEEE passed the IEEE 1609.1–1609.4 series of standards. In July 2010, the IEEE 802.11p standard was officially released. This standard is the physical layer and MAC layer standard of DSRC. It is an extension of the IEEE 802.11 standard for related applications in ITS [14].
The wireless access methods that may be used in these three domains include IEEE 802.11p (Ad-hoc domain), Cellular Networks (2G/3G/4G for the infrastructure domain), WLAN (802.11 a/g/n/ac for the infrastructure domain or in-vehicle domain), and Bluetooth (in-vehicle domain), etc. [15]. VANET applications may use more than one communication method, such as eCall, which uses GPS positioning and a 2G network. When major sensor signals such as airbag deployment are received by eCall devices, the communication module will be automatically activated and dial local 112. It will report the vehicle GPS coordinates, accident time, license plate number, and other information, and establish voice communication with the local rescue team as soon as possible. A typical VANET communication is shown in Figure 6.
A typical feature of in-vehicle communication is that, for different applications, the protocols of each layer can vary greatly, and it is often a cross-layer consideration or a simplified layer consideration. The WAVE protocol stack given by IEEE is currently the most authoritative protocol architecture: the physical layer and data link layer are composed of IEEE 802.11p, IEEE 1609.4, and IEEE 802.2; the network layer and the transport layer have two sets of protocols, the traditional TCP/IP protocol and the IEEE 1609.3 protocol, which are specially designed for in-vehicle safety applications; the application layer distinguishes safety applications and non-safety applications, and the SAE protocol is introduced as a message sublayer for safety applications; finally, there is a cross-layer IEEE 1609.2 as a safety protocol.
- (b)
- Characteristics of VANETs.
Figure 7 shows the Characteristics of VANETs:
- The topological structure of the nodes in a VANET changes rapidly, and the rapid mobility of vehicles determines the frequent changes of the topological structure in the onboard self-organizing network, which greatly shortens the survival time of the communication link between two vehicle nodes. The usual solution is to extend the lifetime of the link by increasing the transmission power, but the increase in the transmission power and the increase in the communication distance also reduce the throughput of the network.
- The rapidly changing topological structure makes it difficult to establish an accurate neighbor node list, and it becomes impractical for each node to obtain and maintain the global topological structure of the entire network. Therefore, the protocol based on the network’s topological structure is not suitable for the vehicle-mounted self-organizing network.
- High-speed vehicle driving brings rapid channel fading and a severe doppler effect. At the same time, the wireless channel quality is very unstable due to the influence of the road conditions, tall buildings, and trees around the road.
- Although the rapid movement of vehicle nodes poses serious challenges to the onboard self-organizing network because vehicles are always driving on the road, the movement of the vehicle nodes is regular, such that the topology changes of the nodes are regular and predictable.
- Vehicle self-organizing networks have abundant external auxiliary equipment. The vehicle-mounted Global Positioning System (GPS) can provide VANET with accurate timing and vehicle location information. The use of electronic maps brings convenience to the VANET networking and routing protocol design. Various functional sensors can be installed on the vehicle to collect the speed, acceleration, direction, and other status information of the vehicle node.
- The communication module in the general MANET is powered by a battery; as such energy saving becomes a key consideration in the protocol design process. In the on-vehicle ad hoc network, the vehicle itself provides power for various devices, which reduces the energy consumption and device volume requirements of the communication equipment.
- (c)
- Potential Applications of VANETs.
The numerous applications are defined by the emerging VANET technologies for driver assistance, efficient traffic, and safety, etc. In VANET (both Vehicle-to-Vehicle (V2V) and Vehicle-to-Infrastructure (V2I)) several potential applications are available. Based on safety-related applications (safety-related and non-safety-related) or on communication methods (Vehicle-to-Vehicle, and Vehicle-to-RSU) the following applications are being considered.
- Safety: For the reduction of injuries, saving lives, and the reduction of the number of accidents, VANET technologies are applied. These include collision warnings, accident warnings, lane departure warnings, obstacle detection, vehicle breakdown, work zone warnings, and so on.
- Periodic Messages: Information which is related to vehicles, such as position, speed, and direction, is to be known by the vehicles from another environment for decision-making, to try to avoid a hazardous situation occurring. Thus, the periodic messages are said to be an important message type that supports the decision that can be taken in safety applications; therefore, it might direct it to an unwanted consumption of bandwidth, especially in vast surroundings, to increase the probability of a storm problem occurring.
- Event-Driven Messages: These messages are only sent when a dangerous situation occurs. Otherwise, they will not be sent. Event-based messages are likely to take a higher priority. The main problem with these letters is the increased guarantee of message delivery to all known vehicles.
- Entertainment/Information Applications: One unsafe application, also known as an information/entertainment application, is to provide drivers with a comfortable ride by using traffic efficiency. Examples include explaining a restaurant menu and its prices, providing passengers with information to find the nearest gas station that provides information about the current weather conditions in a particular area, providing information about available parking spaces in the nearest parking lot, providing seamless access to internet service facilities while traveling, and providing games for online occupants, coupling/decapper tools, payment for parking, Electronic Toll Collection (ETC) and workshop communications.
- Traffic Efficiency: VANET technology can play an important role in improving flow efficiency and reducing flow congestion. Examples include electronic toll collection, traffic management, cooperative adaptive cruise control, and traffic jam-related information, etc.
- Driver Assistance: The provision of good communications and accurate data to vehicles for improving security, privacy, and safety [16] can be performed by VANET. Examples include parking information, digital road map downloading, automatic emergency calls, real-time traffic information, a navigation system and various warning information, etc [17,18].
- (d)
- Routing protocols used in VANET.
The idea behind routing is to create a path with the fewest hops between the transmitter and the receiver to deliver the data packets at a given time. VANET has two types of routing protocols, as shown in Figure 8: First, the topology-based identification of nodes and routing protocols using IP addresses. Topology can be divided into two subcategories: proactive routing protocols and on-demand routing protocols. The proactive routing protocol needs to maintain a routing information table, so it is also called a table-driven routing protocol. Each node uses periodic routing packet broadcasts to exchange routing information to form a routing table for other nodes. When the network topology changes, the node sends an update message, and the node that receives the update message will update its routing table to maintain accurate routing information in time. When a node has data to send, it can obtain a route to the destination node according to its routing table. Another type of on-demand routing protocol passively searches for the route from the source node to the destination node according to the data transmission request. When there is no data transmission request, the nodes do not need to exchange routing information; this is also called a passive routing protocol. The on-demand routing protocol is a type of routing protocol unique to self-organizing networks. It can reduce overhead and increase network throughput. However, the reachability of the destination node and the delay of route establishment are uncertain.
Location-based routing relies on the vehicle’s geographic location to choose the best route for sending the packet to the sender instead of using the IP address.
Location-based routing can be divided into two sub-categories:
- The Non-Delay Tolerant Network (Non-DTN) protocol is the network without direct end-to-end paths and the reduction of connectivity.
- The Delay Tolerant Network (DTN) is routing using a greedy way to transmit packets.
- (e)
- VANET challenges include high node mobility, continuous changes in network topology, delicate data exchange, privacy, real-time, unlimited network size, potential help from infrastructure, time and the crucial impact of security. However, to achieve the purpose of the various applications related to our home network, we need to provide a large amount of communication bandwidth for vehicle traffic. The main challenges of V2V ad hoc are routing-related:
- There are many end-to-end delays and slow packet transmission.
- Security Frameworks: It needs a lightweight, extensible authentication framework, security, reliability, rapidity, and a lower cost of message exchange facilities.
- Quality of Service: Here, the issues are the connection time and the speed of the packet delivery.
- Broadcasting: In VANET, the content of broadcast messages mainly includes security messages and streaming media messages. How to effectively manage and transmit these two messages is a very important issue.
- Transport Layer Challenges: The congestion control mechanism is very poor because transmission errors are interpreted as congestion and reduce throughput. The main challenge for DSRC is channel congestion, especially BSM channel congestion.
- Network Layer Challenges: Given the rapid changes in the network topology caused by the high-speed movement of vehicles in VANET, the way in which to design an effective routing protocol has become a difficult problem for network layer research. The GSR protocol tries to overcome the shortcomings of the routing protocol using location information in MANET, which then applies to VANET. For example, the GPSR protocol in MANET is a greedy forwarding protocol that utilizes location information, but the disadvantage is that there will be a topology hole problem. The GSR protocol uses the static road map and the location information of each vehicle node to find the transmission path to the destination node, thereby overcoming the above problems. Like the GSR protocol, the SAR protocol uses road map information obtained by external devices to construct a “spatial model” for path finding, which can predict and avoid routing recovery problems caused by holes in the network topology. However, the disadvantage of the SAR protocol is that it does not know whether there are vehicles on the selected road to complete the forwarding task. The STAR protocol solves this problem by choosing to find a route along the road with vehicles. The A-STAR protocol uses urban bus lines as a strategy to find an efficient path for data transmission. The protocol is suitable for scenarios with dense urban traffic, and it assumes that bus vehicles cover major urban roads. Based on GSR and A-STAR, the GyTAR protocol fully considers factors such as vehicle driving directions, vehicle density, road multidirectional, and traffic environment changes, making the routing protocol more in line with actual traffic scenarios. Because the road conditions in real life are complicated and the driving conditions of vehicles are also ever-changing, the design of the routing protocol in VANET must be more in line with the actual scene. At present, designing an efficient routing protocol that can effectively find transmission paths in various scenarios is still a major challenge for network layer research.
- Other Challenges: These include the lack of centralized management entities and link-layer synchronization, the ideal connectivity to maintain high portability, the seamless switching of channels between Layer 2 and Layer 3, equal insurance on wires based on user acceptance of the appropriate safety level and personal cost, balanced vehicle safety standards, and parcels being lost when driving at high speed.
However, a vehicle self-organizing network is a special type of mobile self-organizing network which has broad application prospects. The high-speed mobility of vehicle nodes in VANET and the rapid change of network topology have brought severe challenges to the design of network architecture and the design of the related protocols. Table 2 shows the summary of the existing surveys in VANET.
4. Flying Ad-Hoc Network (FANET)
One of the key application cases of UAVs is the use of FANET, which is a subset of VANET [32,33]. In the FANET, coordination and collaboration between nodes are very important for effective data transmission [34,35,36]. The collaboration between nodes depends on the node behavior, and the concept of trust can be used to quantify the node behavior [37,38,39]. Trust helps isolate non-cooperative and malicious network nodes, thereby improving the reliability of the information exchange between nodes [40,41,42].
For networks with highly mobile devices, routing protocols are not practical or do not provide enough throughputs in VANET. However, the topology of the FANET alternates more frequently than that of VANET or MANET [43,44]. The most essential network technology which is applicable these days for the implementation of FANETs is the IEEE 802.11a and 802.11s for mesh ad hoc network extension. A jet powers a flying ad hoc network or a reciprocating engine, and it is piloted remotely through pre-programmed flight plans. These are also called Unmanned Aerial Vehicles (UAVs) and are mostly used for military operations [45,46]. This aerial vehicle works without human help and does not carry humans onboard, like autopilot.
The communication in FANET is broadly classified as UAV-to-UAV (U2U) and UAV–Infrastructure communications (U2I), as shown in Figure 9. In the FANETs, the nodes communicate with each other using multi-hop communication, where one node is linked or connected to the infrastructure and the rest has multi-hop communication [47,48]. Therefore, it is not necessary that all UAV flights should communicate to the satellite or ground base station [49,50,51,52,53].
- (a)
- Challenges in UAV Communications:
- Geographical and environmental constraints,
- Mobility of the node,
- Sufficient bandwidth availability and low latency,
- Synchronization between the UAVs swarms.
- (b)
- Advantages of using multi-UAV over single UAV:
- Cost: Many interviewees said that using drones to collect data is not difficult, but the real problem and challenge is how to use the massive amounts of data collected. At present, there are a lot of companies focusing on front-end data collection in the market, and the cost of pure data collection is getting lower and lower, but there are not many companies capable of back-end data processing and industry-combined applications, and the front and back ends are fighting each other. This leads end-users not only to ensure that the quantity and quality of data collection meet business needs but also to consider multi-party cooperation, thereby increasing a lot of the costs and communication barriers.
- Speed up: Different types of drones can be used in different scenarios based on their characteristics. For example, the advantages of fixed-wing UAVs are long battery life, fast cruising speeds and a strong load capacity, which can be applied to high-speed, heavy-load, large-scale, and long-distance mission types, such as aerial surveying and mapping. Rotary-wing UAVs are characterized by strong maneuverability and being capable of vertical take-off and landing and hovering. They are mainly suitable for mission types with low altitudes, low speeds, and vertical take-off and landing and hovering requirements, such as post-disaster search and rescue.
- Small radar: The radar cross-section of a multi-UAV system is very small, rather than a larger radar cross-section, which is very important for military applications.
- Mission completion time: With many drones, surveillance, reconnaissance, and search operations can be carried out quickly. If a single drone cannot perform the mission, the mission cannot successfully compete. However, in the multi-drone system, if the drone takes off, the mission can survive with other drones.
Although multiple unmanned aircraft systems have several advantages over individual unmanned aircraft systems, because of the dynamic network topology, communication of two far nodes are unique a challenging issue. Table 3 shows the limitations and advantages of using multi-UAV and single UAV.
- (c)
- Characteristics of FANETs.
One characteristic of FANETs is that they are light and compact; this not only means that the drone fuselage is evolving towards disappearance and miniaturization but also that the development of new aerial materials will greatly enhance the flexibility and comfort of the drone.
The second, is integration. To enhance their versatility, drones are evolving in the direction of system integration and comprehensive sensing. During the construction of multi-mission aircraft, the interaction and integration of UAVs with other platforms such as manned aircraft and ground monitoring stations have been enhanced.
The third, is customization. UAVs will be able to meet the specific needs of users and are more flexible and maneuverable. Creating an exclusive drone is no longer a dream.
The fourth, is intelligence. In the future, drones will not only play the role of transport platforms and passively complete various flight missions; they will also be smart partners with various capabilities such as effective governance, data logging, additional analysis, and collaborative operations. With the continuous improvement of their intelligence level, the drones will also achieve automatic data collection and smart learning. At the same time, the combination of drones, AR and VR devices will greatly improve drone flight and control modes. In short, industrial-grade UAV users should actively learn and adhere to the relevant policies and regulations, regulate the development status of the drone business, effectively adopt new technologies and think about how drones can improve their business. The unmanned aircraft market has gradually declined, and the development has become quieter. This is an important opportunity for all parties to re-plan the future application of unmanned aircraft. We recommend that industrial users take a long-term view based on an in-depth understanding of the characteristics of the UAV, assess the situation, learn from experience and lessons, and make rational business judgments. At the same time, we expect UAV industrial applications to develop in a more mature and stable direction. More and more companies are using drone wings to get the business off the ground.
As shown in Figure 10, FANET ad hoc network has different characteristics:
- Node Mobility: In FANET mobility, the degree is bigger than VANET and MANET, in which the UAV node has a speed of 30–460 km/h, which causes communication problems among the UAV nodes.
- Low node density with a large distance between the UAVS.
- The network topology changes frequently.
- power consumption and network lifetime.
- The radio propagation model.
- GPS provides the geospatial localization.
- Access to LoS ( Line-of-Sight).
- (d)
- Routing Protocols used in the FANET Network.
Figure 11 shows the general classification of the routing protocols. However, to prevent network disruptions, jamming attacks, and localized failures, a Jamming-Resilient Multipath Routing Protocol for Flying Ad Hoc Networks has been proposed [32]. In [54], the authors present the Stochastic Packet Algorithm (SPA). However, the core idea is to randomly select a drone for re-routing based on a combination of multiple network metrics in real-time. To establish reliable end-to-end communication in randomly and rapidly flying drones’ networks, [55] uses queue information and node geographic information to determine the next transmission (Fountain-code-based Greedy Queue and Position Assisted (FGQPA)). In [56], the authors proposed a Location-Aided Delay Tolerant Routing (LADTR) protocol that combines geographic relocation and store relay strategies to improve the path availability of the search methods among drones in post-disaster operations. In [57], the authors proposed the Link-quality and Traffic-load Aware Optimized Link-State Routing (LTA-OLSR) protocol. This protocol uses statistics on the received signal strength to find the link quality. The Mobility and Load aware OLSR (ML-OLSR) was proposed in [58], which assigns a stabilization degree for the links based on statistical distance information.
The authors in [59] proposed the Predictive OLSR (P-OLSR), considering the direction and relative speed of the drone that uses the GPS-available information on board. An SDN-based routing management algorithm (STFANET) and central topology are presented in [60], where the controller establishes relay nodes to improve link availability and builds the routing table for each node based on link length. This work [61] proposes a FANET routing protocol (PSO-GLFR) that improves Greedy Forwarding Routing (GFR) using Particle Swarm Optimization (PSO). In [62], the authors proposed a Robust and Reliable Predictive routing Protocol (RARP) that uses speed, three-dimensional positions, and other information to predict the average node position by linear extrapolation, and to estimate the expected contact time accordingly. In [63], the authors presented a compression table for some of the major routing protocols in terms of land balancing, computation complexity, routing category, and communication overhead in the UAV network (Table 4). However, with the development of science, technology, and people’s unremitting study and research, routing protocols for wireless ad hoc networks have developed rapidly. Therefore, we should be aware that the research on routing protocols for wireless ad hoc networks is a relatively complex issue. To truly realize satisfactory routing protocols and mechanisms, we need to continue to explore and research. Table 5 shows a summary of the existing surveys on FANET.
5. Sea Ad-Hoc Networks (SANET)
- (a)
- Terrestrial wireless communication.
Wireless communication between ships and land or between ships is mainly wireless communication using frequencies in the very-high–frequency band, medium- and short-wave band, and short-wave band. GMDSS divides the sea area where vessels navigate into four sea areas, from the A1 sea area to the A4 sea area and requires the installation of the necessary radio equipment according to the sea area in which the vessel navigates (Figure 12).
Short-distance sea is within the sea area (equivalent to the A1 sea area) about 30 nautical miles from the coast of the short-distance sea area and consists in general communication and distress/safety communication, search and rescue activities, and on-site use by digital selective calling devices (DSC) and radiotelephones using the frequency of the very high-frequency band.
Middle distance sea is within the sea area (equivalent to the A2 sea area) about 150 nautical miles from the coast of the medium-distance sea area, and includes general communication, distress/safety communication, search and rescue by DSC, radiotelephone, and narrow-band direct printing telegraphs (NBDP) within which the frequency of the medium- and short-wave band communication of activities and field activities is carried out.
The long-distance communication area is for ships located in the open sea area; terrestrial radio communication is carried out by DSC, radiotelephone, and NBDP in the short-wave band for general communication, distress/safety communication, and search and rescue activities. Communication in the short-wave band is an important wireless communication method, especially for vessels navigating in the sea area (equivalent to the A4 sea area) beyond the communication area (equivalent to the A3 sea area) of the Inmarsat satellite.
- The Broadcasting of Maritime Safety Information.
Maritime safety information (MSI) such as navigation warnings, weather warnings, and urgent notifications necessary to prevent or minimize marine accidents is available in English Navtex (518 kHz) or Japanese Navtex (424 kHz) for ships. In addition, maritime safety information, which consists of the navigation information, search and rescue information, and weather information that make up maritime safety information is reported from the MSI Coordinating Agency to each ship station via the Coastal Bureau.
- (b)
- Satellite wireless communication.
Inmarsat satellite communication is a system that can always communicate worldwide except for station areas by the frequency band of 1.5 GHz/1.6 GHz, and the wireless telephone, facsimile, and data communication can be used. The Cospas Sirsat system is a search and rescue communication system that uses the 121.5 MHz and 406 MHz satellites EPIRB. The system uses several low-altitude polar-orbiting satellites of approximately 850 km.
- (c)
- Distress signals:
- Inmarsat Ship Earth Station Radio Equipment.
- Inmarsat B, C, and F can send distress information from ships to land.
- 406 MHz satellite EPIRB.
- Distress alerts from the 406 MHz satellite EPIRB are relayed by the Cospas-Sirsat polar orbit orbiting satellite and notified to the rescue coordination headquarters via the land receiving station (LUT). The distress signal measures the position of the ship in distress.
- (d)
- Search and rescue information.
Navigation warnings and weather warnings, which is maritime safety information, which is necessary for ship navigation, are provided by the Inmarsat High-Performance Group Call Receiver (EGC: built into the Inmarsat C-type equipment). Distress warnings (relays) from land to other vessels are also sent via the Inmarsat satellite to vessels or all vessels within a specific sea area. Table 6 shows the definition of the sea area.
A distinctive feature of marine communication networks is the movement pattern for the conditions of the ship and sea level, and the received signal quality changes over time accordingly.
- (e)
- SANET applications.
The SANET ad hoc network has many applications, as follows:
- Disasters: The sea ad hoc network is helpful when natural disasters happen, such as oil barges capsizing, the sinking of the ship/boat, and the sinking of ferries carrying goods or people.
- Weather: SANET is helpful to predict tsunamis or to track the water movements, and it utilizes different sensors for this application
- SANET can be used for search operation and release processes.
- Military applications: SANET is very important for the exchange of information between headquarters and soldiers when they are in the ocean.
The main concept of the SANET is the same as that of VANET, MANET, and FANET, but there are some differences in numerous approaches, such as power consumption, topology, speed, and alterations in deployment, etc.
- (f)
- The challenges of SANET include:
- Quality of Service (QoS): The maintenance of the best quality of service for packet forwarding is very important because it involves certain requirements, delays, throughput, and the packet error rate connected with the application.
- Security: These requirements include rapidity, scalable authentication frameworks, and being lightweight, reliable, and secure. For information transfer, it is important to guarantee confidentiality and integrity.
- Scalability: The most important and necessary step toward the realization of effective ship communications is to guarantee a stable and scalable routing mechanism over SANETs. The routing paths are disrupted frequently due to varying ship mobility and network topologies, and it is very difficult to ensure their stability.
- Routing protocol: There are large end-to-end delays and reduced packet delivery ratio.
- Reliability: Because of the sensitive information we send, SANET must be very reliable.
- (g)
- Routing Protocols used in SANET.
At present, several typical routing protocols are (Figure 13): DSDV (destination sequence distance vector routing protocol), TORA, DSR, OLSR, and AODV, etc. Based on the comparative analysis of the delay, delivery rate, and throughput among the classic protocols, the AODV protocol is more suitable for maritime communication. The steps of the protocol are described as follows:
- First, the source node sends routing requests to the neighboring nodes.
- After the surroundings receive the request, they will automatically form a virtual node. In this process, more than one node may receive the request, and these requested nodes are all unified virtual nodes.
- The virtual node continues to send the routing request. If the destination node cannot be reached, there will still be several nodes receiving the request, and these nodes form another virtual node.
- Step 3 is performed recursively until some of the nodes can deliver the message to the destination node, and these nodes form the last virtual node. At this time, the route between each virtual node has been determined.
- At this point, data is sent from the source node to the first virtual node. Currently, all of the nodes in the first virtual node receive the message and distribute the message to each node in the second virtual node, recursively. This process is carried out until the last virtual node sends the message to the destination node.
Based on the genetic algorithm routing method, not only can we obtain the feasible path from the source to the destination, but we can also find the optimal path according to the communication resources of the link, and the average resource of the obtained link is about 20% more than AODV. The protocol selection algorithm uses the weighted values of the signal quality, spectrum status, physical layer bandwidth, and resource allocation as the criteria to select the unit service transmission path with the smallest weight, which is regarded as the best route; when the above parameters change, the protocol interaction and route selection are repeated, The network route is automatically updated to ensure service transmission quality, system throughput, and end-to-end transmission delay.
The performance advantages and disadvantages of various systems are obvious, as shown in Table 7. The most prominent problem is that no communication method can achieve stable full ocean coverage and unrestricted transmission distance, and ensure smooth broadband access, lower equipment costs and usage fees. Moreover, the existing various communication systems are isolated from each other, lacking a unified coordination and management mechanism, and cannot guarantee the reasonable and efficient operation of the entire marine communication system. Table 8 shows a summary of the existing surveys on SANET.
6. Comparison of MANET, VANET, FANET, and SANET (MVFS)
Ad hoc networks are also called infrastructure-less networks, non-centered networks, multi-hop networks, and self-organizing wireless networks [78]. There is no fixed infrastructure, and each node is a vehicle/mobile/aircraft/ship which can dynamically maintain contact with other nodes in any way. Due to the limitation of the terminal’s wireless coverage range, two user terminals that cannot communicate directly can use other nodes to forward packets. Any node is a router, and it can complete the function of maintaining and discovering routes to other nodes.
An ad hoc wireless network consists of an independent group of wireless nodes or stations that cooperate. This network is independent of fixed infrastructure and adopts distributed management. It is a self-managed, self-organized, and self-created network. Compared with the traditional cellular network, the ad hoc wireless network does not contain a base station; all the nodes operate in a distributed manner and have the function of a router which is responsible for maintaining and discovering routes to other devices/nodes and transmitting or forwarding packets to neighboring nodes. This kind of network can operate alone and can also be connected to a wired backbone through a gateway.
The origin of ad hoc networks can be traced back to the aloha network. When the IEEE 802.11 standards were developed by IEEE, the packet radio network was renamed as an ad hoc network. Ad hoc comes from Latin and means “for a specific purpose or occasion” or “only for this situation”. At that time, the packet radio network was used in large-scale military and rescue operations, and by adopting a new name, IEEE hoped that the ad hoc network would become a temporary network for a specific purpose and a short-term existence. It should be noted that the ad hoc network defined by the IEEE802.11 standard is a network composed of only those sites that can be connected directly through a wireless medium, that is, an independent basic service set (IBSS). IBSS has no access point and is a single-hop ad hoc network, but currently, the ad hoc network being studied is usually multi-hop. The working group of the mobile ad hoc network (MANET) was established in 1997 and is responsible for developing and researching routing algorithms for MANETs with hundreds of nodes and formulating the corresponding standards. The work of the manet working group achieved remarkable results, and a dozen internet-draft standards have been formulated.
- Independence: Compared with conventional communication networks, the biggest difference from ad hoc networks is the ability to quickly set up mobile communication networks, anytime and anywhere, without the need for hardware support for the infrastructure network equipment. This organization is not dependent on existing telecom network equipment and has a degree of independence. This dedicated networking feature is great for disaster management, remote communications, and other applications.
- Structure: Ad hoc networks allow the mobile host to move freely within the network. The movement of the host will cause the link between the hosts to increase or disappear, and the connections among the hosts are constantly changing. The host may also be a router in an ad hoc network. Therefore, the movement will continuously change the network topology. For conventional networks, the network topology is relatively stable.
- Communication bandwidth: Wired infrastructure is not supported in ad hoc networks. However, communication between the stations is achieved via wireless transmission. Because of the physical characteristics of the wireless channel, the network bandwidth provided by the wireless channel is much smaller than the wired channel bandwidth. Furthermore, considering various factors such as collision, signal attenuation, and the noise interference caused by competing to share wireless channels, the actual available bandwidth of the mobile terminals is less than the maximum theoretical bandwidth value.
- Host energy: In an ad hoc network, the hosts are all mobile device nodes, for instance, PDAs, portable computers, or palmtop computers. Because the host may be in a state of non-stop movement, the energy of the host is mainly provided by the battery, such that the ad hoc network has the characteristic of limited energy.
- Distributed characteristics: Ad hoc networks do not have central control nodes, and hosts communicate with each other through distributed protocols. If one or more nodes on the network fail, the other nodes will continue to function properly.
- Life cycle: Wireless networks are mainly used to meet temporary communication needs. The survival times are generally short compared to those of wired networks.
- Physical security: Compared to fixed networks, mobile networks are generally more vulnerable to physical security attacks, and are vulnerable to eavesdropping, denial of service attacks, and spoofing. Some of the current connection security technologies are used on wireless networks to reduce security attacks. However, the natural distribution of the ad hoc network has a certain survivability compared to a centralized network.
The topological architecture of ad hoc wireless networks can be divided into two classes: flat peer-to-peer and layered architecture. In peer-to-peer architecture, all the network nodes are in the same state. In the hierarchical structure of an ad hoc wireless network topology, the entire network consists of groups as subnets. Each group consists of multiple cluster members and group heads. The group leaders can form higher-level networks, and higher-level networks can be grouped to create higher-level networks. The members and groups of each group change dynamically and are automatically networked. Depending on the different hardware configurations, a layered structure can be divided into single-frequency and multi-frequency layered structures. The single frequency hierarchy uses one frequency for communication, and all the nodes use the same frequency. In multi-layer frequency architecture, in the case of a two-layer network, the communication range of the lower layer network becomes narrower, and the communication range of the upper layer network becomes wider. The cluster members use the communication frequency. The head node uses one frequency to communicate with the block members and the other frequency to maintain the connection to the cluster head. There are advantages and disadvantages to using a generic point-to-point structure and hierarchy. In the network structure of the general simple point-to-point structure, the state of each node is the same, and if there are multiple paths, it is the source node. The target node and communications network are not a bottleneck, but the network security is relatively high in comparison, and the biggest drawback is that the network size is limited. As the network grows, the cost of maintaining a route increases dramatically and the bandwidth consumed becomes limited. The hierarchical network size is unlimited, scalability is good, and the burden of group routing is relatively small. The hierarchical structure requires a complex algorithm for the block header selection, but hierarchical network architecture has high system throughput and easy node placement. Currently, self-organizing wireless networks are gradually showing a hierarchical trend. Several network routing algorithms have been proposed according to the hierarchical network model.
Compared with cellular networks, wireless ad hoc networks have incomparable advantages. First, no fixed infrastructure (such as base stations) is required. Wireless ad hoc networks can be established anytime and anywhere, and can be used when there are no other communication facilities, or when some facilities cannot be used due to confidentiality, cost, or security, etc. Secondly, the ad hoc network is not restricted by a fixed topology structure, and it has strong fault tolerance and robustness. Wireless ad hoc networks have broad application prospects. Military operations and rescue operations in earthquakes, floods, or remote areas are traditional application areas of ad hoc networks. However, they can also be used as a wireless access network, providing rapid networking capabilities. In the local area, notebooks and palmtop computers can use ad hoc methods to publish and share information in meetings. The personal area network using Bluetooth technology is very promising as a short-distance ad hoc network. Sensor networks can be used in many fields, such as battlefield intelligence collection, environmental pollution monitoring, the early prediction of earthquakes and tsunamis, and production workshop monitoring.
Ad hoc networks include MANET, VANET, FANET, and SANET (Figure 1). In MANET, each node acts as a host and as a router, where the nodes are linked through wireless channels in the network. The nodes communicate without relying on any pre-existing infrastructure. VANET is a subset of MANETs, and FANET is a subset of VANET. SANET is one of the popular types of ad hoc networks. Table 9 summarizes the differences between traditional ad hoc wireless networks. Regarding the topology change, MANET topology changes the very least, VANET topology is fast, SANET topology causes a medium amount of alterations, and FANET topology alters rapidly and faster than other MVFS ad hoc networks [79]. The node mobility is the most different among MVFS ad hoc networks; the MANET is slow compared to the other MVFS ad hoc networks 15. In FANET, the node mobility is very high compared to MANET, VANET and SANET. However, the UAV speed is 30–460 km/h [80]. MANET nodes move on specific land, FANET nodes fly in the sky, and VANET nodes move the city, highway, and rural areas [81,82,83,84]. Regarding node density, FANET node density is very low compared with the MANET, VANET, and SANET, where the distance between UAVs can be several millimeters [85,86,87,88]. Typically, in the radio propagation nodes, MANET, VANET, and SANET are close to the ground and often have no line of sight among the source and the destination. However, in FANET, the nodes are typically far from the ground, and in most cases, there is a line of sight among the UAVs. Regarding localization, exact geographical localization [89] is at the essence of mobile and mutual ad hoc networks [90]. However, the existing localization methods are contained proximity, beacons, and global position systems (GPS) [91]. In MANET, the GPS is used to obtain mobile communication coordinates. In VANET, by using some kinds of ground-based reference stations for zone rectification with 10 cm accuracy, several investigators utilize Differential GPS (DGPS) or Assisted GPS (AGPS) [92,93]. In FANET, the GPS can provide information within one second, but it may not be enough to conform to the FANET protocols. However, Every UAV/Drone should be equipped with an Inertial Measurement Unit (IMU), GPS, AGPS, and DGPS to show at any time the position of other UAVs. SANET provides higher accuracy by improving a basic GPS signal called Differential GPS (DGPS), which improves the safety for ship operations in its coverage areas. Many countries use DGPS for sweeping, buoy positioning, and dredging. This enhancement is to improve port navigation [94].
7. Comparison of Short and Long-Distance Wireless Communication Technologies
Wireless communication is a communication method that uses the characteristics of electromagnetic wave signals to propagate in free space for information exchange. Wireless communication technology itself has many advantages and a low cost; wireless communication technology does not need to establish physical lines, let alone using a large amount of manpower to lay cables. Wireless communication technology is not restricted by the industrial environment, and it has a strong ability to resist changes in the environment.
The common wireless communication (data) transmission methods and technologies are divided into two types: “Short-distance wireless communication technology” and “long-distance wireless transmission technology”.
- Short distance wireless transmission technology.
Short distance wireless communication technology means that both parties in the communication transmit data through radio waves, the transmission distance is within a relatively short range, and its application range is very wide. In recent years, the short-range wireless communication standards that are widely used and have good development prospects include Zig-Bee, Bluetooth, wireless broadband (Wi-Fi), ultra-wideband (UWB), and near field communication (NFC).
- Zig-Bee is a short-distance, low-power wireless communication technology based on the IEEE802.15.4 standard. Zig-Bee comes from the communication method of the bee colony. The bee (Bee) relies on flying and buzzing (Zig) to shake its wings to determine the direction, location, and distance of the food source with its companions. However, it is characterized by a short distance, and its usual transmission distance is 10–100 m. However, it requires low power consumption.
- Bluetooth can realize point-to-point or point-to-multipoint wireless data and sound transmission within a radius of 10 m, and its data transmission bandwidth can reach 1 Mbps. The communication medium is a frequency between 2.402 GHz and 2.480 GHz Electromagnetic waves.
Wireless broadband (Wi-Fi) is a wireless LAN access technology based on the 802.11 protocol. The outstanding advantage of (Wi-Fi) technology is that it has a wider local area network coverage, and its coverage radius can reach about 100 m. Compared with Bluetooth technology, Wi-Fi has a wider coverage area; the transmission speed is very fast. The transmission speed can reach 11 Mbps (802.11.b) or 54 Mbps (802.11.a), which is suitable for high-speed data transmission services.
- Ultra-wideband (UWB) is a non-carrier communication technology that uses nanosecond to picosecond non-sine wave narrow pulses to transmit data. The transmission distance is usually within 10 M, using a bandwidth above 1 GHz, and the communication speed can be up to several hundred megabits/s or more. UWB’s working frequency range ranges from 3.1 GHz to 10.6 GHz, and the minimum working bandwidth is 500 MHz.
- NFC is a new short-range wireless communication technology with a working frequency of 13.56 MHz. It was developed from 13.56 MHz radio frequency identification (RFID) technology. NFC uses Amplitude Shift Keying (ASK) modulation, and its data transmission rate is generally 106 kbit/s and 424 kbit/s. The main advantages of NFC are its short distance, high bandwidth, low energy consumption, compatibility with non-contact smart card technology, and broad application value in fields such as access control, public transportation, and mobile payment.
- 2.
- Long-distance wireless transmission technology.
At present, the wireless communication technologies widely used in remote areas mainly include, DSRC, WiMAX, GPRS/CDMA, digital radio, spread spectrum microwaves, wireless network bridges, satellite communication, and shortwave communication technology, etc.
- Digital radio communication is a wireless data transmission station that adopts digital signal processing, digital modulation and demodulation, forward error correction, equalization soft decision, and other functions. Most of the working frequencies of digital radio stations use the 220–240 MHz or 400–470 MHz frequency bands, which are compatible with data phones, and offer good real-time data transmission, dedicated data transmission channels, and one-time investment.
- A wireless network bridge is the product of the combination of wireless radio frequency technology and traditional wired network bridge technology. The wireless bridge is designed for point-to-point network interconnection using wireless technology for long-distance data transmission. It is a storage and forwarding device that realizes LAN interconnection at the link layer. It can be used for long-distance (up to 50 Km), high-speed (up to 100 Mbps) wireless networking between fixed digital devices and other fixed digital devices.
- Satellite communication systems usually consist of two parts, namely the satellite end and the ground end. The satellite end is in the air and is mainly used to amplify the signal sent by the ground station and then forward it to other ground stations. The ground station is mainly used to control and track the satellites, and to realize the connection of the ground communication system to the satellite communication system.
- Shortwave communication: According to the division of the International Radio Advisory Committee, “shortwave” refers to electromagnetic waves with a wavelength of 10 m–100 m and a frequency of 3 MHz–30 MHz. Shortwave communication refers to radio communication using short waves, also known as high frequency (HF) communication.
Table 10 compares the commonly used range of wireless access technologies in terms of their transmission rate, spectrum characteristics and communication modes. Each radio system has its technical performance and application fields. It provides high-speed and high-reliability internet access but does not support applications with high real-time requirements. Telecom networks (such as GSM/CDMA) are mainly for voice services, so they can provide low latency. Ad hoc communication systems (such as DSRC) offer real-time support but poor reliability and are application-linked networks that can be used to create effective target systems only when close to the application.
8. Simulation Tools for Ad Hoc Network
An ad hoc network is a multi-hop temporary non-central network composed of a group of mobile nodes with wireless communication transceivers. It can quickly build a mobile communication network at any time and any place and does not require an existing information base with the support of network facilities; each terminal in the network can move freely with equal status. As one of the core technologies of the next-generation network, the ad hoc network is widely used in military applications, civil search and rescue, industrial surveillance, mobile commerce, and other fields. Because of its special characteristics, it has become a hot issue in the fields of computers and communication. However, Table 11 shows the simulation tools for varied ad hoc networks. Network simulation technology is a necessary and effective tool for researchers in network planning and design. Network Simulation is the use of computer technology to construct the network topology and implement network protocols to simulate network behavior. It is a technique between experiment and calculation. It establishes a mathematical model of the actual system and simulates the dynamic behavior of the physical system according to the same operating mechanism. It can obtain specific network characteristic parameters and can then study and analyze the network performance to achieve the purpose of improving the network operation status. NS is an open-source discrete event-driven network simulator. NS-2 is an object-oriented, discrete event-driven network environment simulator, which is mainly used to solve network research problems. NS-2 provides a simulation of multiple protocols such as TCP, routing, and multicast on wireless or wired networks. NS-2 is implemented by two programming languages: OTCL (a TCL scripting programming language with object-oriented features) and C++. NS-3 is a discrete-event network simulator for Internet systems, targeted primarily for research and educational use. ns-3is free software, licensed under the GNU GPLv2 license, and is publicly available for research and development use. The optimized Network Engineering Tool (OPNET) is the product of the American MIL3 company. OPNET uses a discrete event-driven simulation mechanism, where “event” refers to the change of the network state, and the simulator can only work when the network state changes. Objective Modular Network Testbed in C++ (OMNET++) is a software intended to build a wireless ad hoc network simulation platform. Through the study of the operating mechanism of OMNET++ simulation software, a mobile framework was installed based on the simulation platform to build a wireless ad hoc network simulation platform. SUMO “Simulation of Urban Mobility” is an open-source, microscopic, multi-modal traffic simulation. It allows us to simulate the way in which a given traffic demand composed of a single-vehicle/UAV moves in a given road network. GloMoSim (Global Mobile Information System) simulation software was developed by the Computer Department of UCLA University in the United States. The design of the parallel simulation language Parsec, based on the C language, can realize the parallel discrete-time drive simulation with scalability and programmability. This supports pure wireless network protocols, and the result data can be expressed in text or graphics. Using a layered approach, standard APIs are used to communicate between different layers, which implements the basic protocol stack level required by the network. QualNet is a high-performance network simulation system that can predict the performance of wireless networks, wired networks, and hybrid networks and equipment. QualNet can simulate a real wireless network in a “software virtual network” at a real-time speed. QualNet has multi-threaded processing capabilities, supports multi-core 64-bit processors, and can simulate a network of thousands of nodes. The SIMITS simulator tool is a software communication in the field of the intelligent transport system (IST), allowing us to measure the performance of different MAC and change their parameters.
9. Conclusions
An ad hoc network is a self-organizing wireless network composed of free communication nodes that do not depend on infrastructure support and control. Because of their rapid networking and strong robustness, ad hoc networks have gradually been applied to many key scenarios, such as battlefield communications, emergency rescue, and disaster relief, increasing the coverage of existing cellular networks, and so on. Therefore, ad hoc networks are one of the important components of the next-generation wireless communication network system. Network performance evaluation is the core subject of the study of ad hoc networks, which has important guiding significance for actual networking and network optimization, and is a decisive factor to promote the development, practicality, and commercialization of ad hoc networks. Routing protocol design is the key technology of the ad hoc network, which directly affects the data transmission of the ad hoc network. A good routing protocol design can improve the overall performance of the ad hoc network.
Regarding the interconnection of a wireless ad hoc network with the Internet and a wide area network, from the external point of view, it can be considered that the ad hoc network is an IP subnet. The transmission of some packets in the network is completed by the routing protocol in the network (the packet may have to go through multiple hops to reach the destination), and when the packet enters or leaves the subnet, the standard IP routing mechanism is used. This requires the gateway node to be able to run multiple routing protocols. The wireless ad hoc network can be regarded as an extension of the existing network under specific occasions. As a mobile node in the ad hoc network, there is a need to access existing wired network resources and communicate with mobile nodes in other ad hoc networks. In this paper, we presented and explained the current direction and status of the research on the popular members of the wireless ad hoc network family and provided a comparative analysis of the ad hoc networks. This is the first paper that discusses the popular types of ad hoc networks’ characteristics, basic architecture, existing routing techniques, advantages, disadvantages, potential applications, and challenges with the comparison of the MVFS ad hoc networks MANET, VANET, FANET, and SANET communications.
As a development direction that has not come from the organization of network communication, the collaborative networking of drone self-organizing networks and wireless sensor networks has broad research and application prospects, in addition to physical layer detection technology and radiofrequency units such as antenna power amplifiers, the upper MAC protocol, and the routing protocol. The design will be a huge challenge for air–sea integrated ad hoc network applications. The problems faced by the MAC layer include the high-rate and low-latency transmission of burst services, multi-priority support, efficient channel utilization, and error control; the design of the FANET network layer focuses on highly dynamic topology, and fully distributed, efficient, and reliable routing protocols. The goal of the integrated optimization design of VANET, maritime wireless sensor network, and the UAV self-organizing network is to establish reliable and efficient communication between heterogeneous communication facilities based on different applications.
Author Contributions
M.A.A.-A. and A.A.A.-A. contributed to the main idea and the methodology of the research. M.A.A.-A. designed the experiment, performed the simulations, and wrote the original manuscript. A.A.A.-A., M.S., and H.L. contributed significantly to improving the technical and grammatical contents of the manuscript. A.A.A.-A., M.A.A.-A., M.S. and H.L. reviewed the manuscript and provided valuable suggestions to further refine the manuscript. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by Basic Science Research Program through the National Research Foundation of Korea(NRF) funded by the Ministry of Education, Science and Technology(grant number: NRF-2016R1D1A1B01011908).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Banerjee, S.; Ghosh, A.; Mahapatra, S.; Karmakar, R. Performance Survey of MANET Routing Protocols with TCP Congestion Control Algorithms. In Proceedings of the 2020 IEEE 1st International Conference for Convergence in Engineering (ICCE), Kolkata, India, 5–6 September 2020; pp. 433–438. [Google Scholar] [CrossRef]
- Abdel-Fattah, F.; Farhan, K.A.; Al-Tarawneh, F.H.; Altamimi, F. Security Challenges and Attacks in Dynamic Mobile Ad Hoc Networks MANETs. In Proceedings of the 2019 IEEE Jordan International Joint Conference on Electrical Engineering and Information Technology (JEEIT), Amman, Jordan, 9–11 April 2019; pp. 28–33. [Google Scholar] [CrossRef]
- Kariyannavar, S.S.; Thakur, S.; Maheshwari, A. Security in Mobile ADHOC Networks: Survey. In Proceedings of the 2021 6th International Conference on Inventive Computation Technologies (ICICT), Coimbatore, India, 20–22 January 2021; pp. 135–143. [Google Scholar] [CrossRef]
- Al Mojamed, M. Integrating IP Mobility Management Protocols and MANET: A Survey. Future Internet 2020, 12, 150. [Google Scholar] [CrossRef]
- Kanellopoulos, D.; Sharma, V.K. Survey on Power-Aware Optimization Solutions for MANETs. Electronics 2020, 9, 1129. [Google Scholar] [CrossRef]
- Nadeem, A.; Howarth, M.P. A Survey of MANET Intrusion Detection & Prevention Approaches for Network Layer Attacks. IEEE Commun. Surv. Tutor. 2013, 15, 2027–2045. [Google Scholar] [CrossRef] [Green Version]
- Singh, S.K.; Prakash, J. Energy Efficiency and Load Balancing in MANET: A Survey. In Proceedings of the 2020 6th International Conference on Advanced Computing and Communication Systems (ICACCS), Kondampatty, India, 6–7 March 2020; pp. 832–837. [Google Scholar] [CrossRef]
- Muruganandam, S.; Renjit, J.A.; Kumar, R.S. A Survey: Comparative study of security methods and trust manage solutions in MANET. In Proceedings of the 2019 Fifth International Conference on Science Technology Engineering and Mathematics (ICONSTEM), Chennai, India, 14–15 March 2019; Volume 1, pp. 125–131. [Google Scholar] [CrossRef]
- Boulaiche, M. Survey of Secure Routing Protocols for Wireless Ad Hoc Networks. Wirel. Pers. Commun. 2020, 114, 483–517. [Google Scholar] [CrossRef]
- Al-Absi, M.A.; Al-Absi, A.A.; Kim, T.; Lee, H.J. An environmental channel throughput and radio propagation modeling for vehicle-to-vehicle communication. Int. J. Distrib. Sens. Netw. 2018, 14, 1–10. [Google Scholar] [CrossRef]
- Mohammed, A.A.; Ahmed, A.A.; Hind, R.; Lee, H.J. A Novel Throughput and Collision for City Environment in V2V Communication. In Proceedings of the 10th IEEE International Conference on ICTC Convergence, Jeju Island, Korea, 16–18 October 2019; pp. 1413–1415. [Google Scholar]
- Mohammed, A.A.; Ahmed, A.A.; Lee, H.J. Comparison between DSRC and other Short-Range Wireless Communication Technologies. In Proceedings of the 2020 22nd International Conference on Advanced Communication Technology (ICACT) Phoenix Park, PyeongChang, Korea, 16–19 February 2020; pp. 1–5. [Google Scholar]
- Al-Absi, M.A.; Lee, H.J.; Al-Absi, A.A. A Secure Enhanced Non-Cooperative Cognitive Division Multiple Access for Vehicle-to-Vehicle Communication. Sensors 2020, 20, 1000. [Google Scholar] [CrossRef] [Green Version]
- Al-Absi, A.A.; Al-Absi, M.A.; Sain, M.; Lee, H.J. Channel Allocation for Connected Vehicles in Internet of Things Services. Sensors 2021, 21, 3646. [Google Scholar] [CrossRef]
- Han, Z.; Swindlehurst, A.L.; Liu, K.J.R. Optimization of MANET connectivity via smart deployment/movement of unmanned air vehicles. IEEE Trans. Veh. Technol. 2009, 58, 3533–3546. [Google Scholar] [CrossRef]
- Mejri, M.N.; Ben-Othman, J.; Hamdi, M. Survey on VANET security challenges and possible cryptographic solutions. Veh. Commun. 2014, 1, 53–66. [Google Scholar] [CrossRef]
- Manvi, S.S.; Tangade, S. A survey on authentication schemes in VANETs for secured communication. Veh. Commun. 2017, 9, 19–30. [Google Scholar] [CrossRef]
- Muhammad, M.; Safdar, G.A. Survey on existing authentication issues for cellular-assisted V2X communication. Veh. Commun. 2018, 12, 50–65. [Google Scholar] [CrossRef]
- Noor-A-Rahim, M.; Liu, Z.; Lee, H.; Ali, G.G.M.N.; Pesch, D.; Xiao, P. A survey on resource allocation in vehicular networks. IEEE Trans. Intell. Transp. Syst. 2020, 1–21. [Google Scholar] [CrossRef]
- Nazib, R.A.; Moh, S. Reinforcement Learning-Based Routing Protocols for Vehicular Ad Hoc Networks: A Comparative Survey. IEEE Access 2021, 9, 27552–27587. [Google Scholar] [CrossRef]
- Malhi, A.K.; Batra, S.; Pannu, H.S. Security of vehicular ad-hoc networks: A comprehensive survey. Comput. Secur. 2020, 89, 101664. [Google Scholar] [CrossRef]
- Al-Shareeda, M.A.; Anbar, M.; Hasbullah, I.H.; Manickam, S. Survey of Authentication and Privacy Schemes in Vehicular ad hoc Networks. IEEE Sens. J. 2021, 21, 2422–2433. [Google Scholar] [CrossRef]
- Hussain, R.; Lee, J.; Zeadally, S. Trust in VANET: A Survey of Current Solutions and Future Research Opportunities. IEEE Trans. Intell. Transp. Syst. 2021, 22, 2553–2571. [Google Scholar] [CrossRef]
- Farooq, S.M.; Hussain, S.M.S.; Ustun, T.S. Survey of Authentication Techniques in Vehicular Ad-hoc Networks (VANETs). IEEE Intell. Transp. Syst. Mag. 2020. [Google Scholar] [CrossRef]
- Al-Heety, O.S.; Zakaria, Z.; Ismail, M.; Shakir, M.M.; Alani, S.; Alsariera, H. A Comprehensive Survey: Benefits, Services, Recent Works, Challenges, Security, and Use Cases for SDN-VANET. IEEE Access 2020, 8, 91028–91047. [Google Scholar] [CrossRef]
- Raza, S.; Wang, S.; Ahmed, M.; Anwar, M.R. A survey on vehicular edge computing: Architecture, applications, technical issues, and future directions. Wirel. Commun. Mob. Comput. 2019, 2019, 1–19. [Google Scholar] [CrossRef]
- Azam, F.; Yadav, S.K.; Priyadarshi, N.; Padmanaban, S.; Bansal, R.C. A Comprehensive Review of Authentication Schemes in Vehicular Ad-Hoc Network. IEEE Access 2021, 9, 31309–31321. [Google Scholar] [CrossRef]
- Sheikh, M.S.; Liang, J.; Wang, W. A Survey of Security Services, Attacks, and Applications for Vehicular Ad Hoc Networks (VANETs). Sensors 2019, 19, 3589. [Google Scholar] [CrossRef] [Green Version]
- Arif, M.; Wang, G.; Alam Bhuiyan, Z.; Wang, T.; Chen, J. A survey on security attacks in VANETs: Communication, applications and challenges. Veh. Commun. 2019, 19, 100179. [Google Scholar] [CrossRef]
- Lu, Z.; Qu, G.; Liu, Z. A Survey on Recent Advances in Vehicular Network Security, Trust, and Privacy. IEEE Trans. Intell. Transp. Syst. 2019, 20, 760–776. [Google Scholar] [CrossRef]
- Khan, U.A.; Lee, S.S. Multi-Layer Problems and Solutions in VANETs: A Review. Electronics 2019, 8, 204. [Google Scholar] [CrossRef] [Green Version]
- Pu, C. Jamming-Resilient Multipath Routing Protocol for Flying Ad Hoc Networks. IEEE Access 2018, 6, 68472–68486. [Google Scholar] [CrossRef]
- Miya, T.; Ohshima, K.; Kitaguchi, Y.; Yamaoka, K. Experimental Analysis of Communication Relaying Delay in Low-Energy Ad-hoc Networks. arXiv 2020, arXiv:2010.15572. [Google Scholar]
- Yaacoub, J.P.; Noura, H.; Salman, O.; Chehab, A. Security analysis of drones systems: Attacks, limitations, and recommendations. Internet Things 2020, 11, 1–39. [Google Scholar] [CrossRef]
- Boccadoro, P.; Striccoli, D.; Grieco, L.A. Internet of Drones: A Survey on Communications, Technologies, Protocols, Architectures and Services. arXiv 2020, arXiv:2007.12611. [Google Scholar]
- Motlagh, N.H.; Taleb, T.; Arouk, O. Low-Altitude Unmanned Aerial Vehicles-Based Internet of Things Services: Comprehensive Survey and Future Perspectives. IEEE Internet Things J. 2016, 3, 899–922. [Google Scholar] [CrossRef]
- Altawy, R.; Youssef, A.M. Security privacy and safety aspects of civilian drones: A survey. ACM Trans. Cyber-Phys. Syst. 2016, 1, 7. [Google Scholar] [CrossRef]
- Nassi, B.; Shabtai, A.; Masuoka, R.; Elovici, Y. SoK—Security and privacy in the age of drones: Threats challenges solution mechanisms and scientific gaps. arXiv 2019, arXiv:1903.05155. [Google Scholar]
- Ritchie, M.; Fioranelli, F.; Borrion, H. Micro UAV crime prevention: Can we help Princess Leia? In Preventing Crime in the 21st Century; Springer: Cham, Swizerland, 2017; pp. 359–376. [Google Scholar]
- Eshel, T. Mobile Radar Optimized to Detect Uavs, Precision Guided Weapons. Def. Update. 8 February 2013. Available online: https://defense-update.com/20130208_mobile-radar-optimized-to-detect-uavs-precision-guided-weapons.html (accessed on 10 November 2020).
- Jiang, Z.J.; Cheng, X.G.; Peng, Y.Q. Research on UAV identification algorithm based on deeplearning. App. Elec. Tech. 2017, 43, 84–87. [Google Scholar]
- Zhao, J.; Fu, X.; Yang, Z.; Xu, F. Radar-Assisted UAV Detection and Identification Based on 5G in the Internet of Things. Wirel. Commun. Mob. Comput. 2019, 2019, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Amponis, G.; Lagkas, T.; Sarigiannidis, P.; Vitsas, V.; Fouliras, P. Inter-UAV Routing Scheme Testbeds. Drones 2020, 5, 2. [Google Scholar] [CrossRef]
- Nikitas, A.; Michalakopoulou, K.; Njoya, E.T.; Karampatzakis, D. Artificial Intelligence, Transport and the Smart City: Definitions and Dimensions of a New Mobility Era. Sustainability 2020, 12, 2789. [Google Scholar] [CrossRef] [Green Version]
- Erdelj, M.; Natalizio, E.; Chowdhury, K.R.; Akyildiz, I.F. Help from the Sky: Leveraging UAVs for Disaster Management. IEEE Pervasive Comput. 2017, 16, 24–32. [Google Scholar] [CrossRef]
- ANCHORS Project. Available online: http://anchorsproject.org/index.php/en/home/14-das-projekt-im-ueherhlick17-projectoverview.htm! (accessed on 2 February 2016).
- Khan, M.F.; Yau, K.-L.A.; Noor, R.M.; Imran, M.A. Routing Schemes in FANETs: A Survey. Sensors 2019, 20, 38. [Google Scholar] [CrossRef] [Green Version]
- Nawaz, H.; Ali, H.M.; Laghari, A.A. UAV Communication Networks Issues: A Review. Arch. Comput. Methods Eng. 2021, 28, 1349–1369. [Google Scholar] [CrossRef]
- Lakew, D.S.; Sa’Ad, U.; Dao, N.-N.; Na, W.; Cho, S. Routing in Flying Ad Hoc Networks: A Comprehensive Survey. IEEE Commun. Surv. Tutor. 2020, 22, 1071–1120. [Google Scholar] [CrossRef]
- Kaushik, P. FANET Routing Protocols: Review. Int. J. Adv. Res. Dev. 2018, 3. Available online: www.IJARnD.com (accessed on 10 May 2020).
- Oubbati, O.S.; Atiquzzaman, M.; Lorenz, P.; Tareque, H.; Hossian, S. Routing in Flying Ad Hoc Networks: Survey, Constraints, and Future Challenge Perspectives. IEEE Access 2019, 7, 81057–81105. [Google Scholar] [CrossRef]
- Hong, J.; Zhang, D.H. TARCS: A Topology Change Aware-Based Routing Protocol Choosing Scheme of FANETs. Electronics 2019, 8, 274. [Google Scholar] [CrossRef] [Green Version]
- Fotouhi, A.; Qiang, H.; Ding, M.; Hassan, M.; Giordano, L.G.; Garciarodriguez, A.; Yuan, J. Survey on UAV Cellular Communications: Practical Aspects, Standardization Advancements, Regulation, and Security Challenges. IEEE Commun. Surv. Tutor. 2019, 21, 3417–3442. [Google Scholar] [CrossRef] [Green Version]
- Pu, C. Stochastic Packet Forwarding Algorithm in Flying Ad Hoc Networks. In Proceedings of the MILCOM 2019—2019 IEEE Military Communications Conference (MILCOM), Norfolk, VA, USA, 12–14 November 2019; pp. 490–495. [Google Scholar]
- Yin, C.; Xiao, Z.; Cao, X.; Xi, X.; Yang, P.; Wu, D. Enhanced routing protocol for fast flying UAV network. In Proceedings of the 2016 IEEE International Conference on Communication Systems (ICCS), Shenzhen, China, 14–16 December 2016; pp. 1–6. [Google Scholar]
- Arafat, M.Y.; Moh, S. Location-Aided Delay Tolerant Routing Protocol in UAV Networks for Post-Disaster Operation. IEEE Access 2018, 6, 59891–59906. [Google Scholar] [CrossRef]
- Pu, C. Aware routing for UAV ad hoc networks. In Proceedings of the 4th IEEE International Conference on Collaboration and Internet Computing (CIC), Philadelphia, PA, USA, 18–20 October 2018; pp. 71–79. [Google Scholar]
- Zheng, Y.; Jiang, Y.; Dong, L.; Wang, Y.; Li, Z.; Zhang, H. A mobility and load aware OLSR routing protocol for UAV mobile ad-hoc networks. In Proceedings of the 2014 International Conference on Information and Communications Technologies (ICT 2014), Nanjing, China, 15–17 May 2014; pp. 1–7. [Google Scholar]
- Rosati, S.; Kruzelecki, K.; Traynard, L.; Rimoldi, B. Speed-aware routing for UAV ad-hoc networks. In Proceedings of the 2013 IEEE Globecom Workshops (GC Wkshps), Atlanta, GA, USA, 9–13 December 2013; pp. 1367–1373. [Google Scholar]
- Silva, T.D.; De Melo, C.F.E.; Cumino, P.; Rosario, D.; Cerqueira, E.; De Freitas, E.P. STFANET: SDN-Based Topology Management for Flying Ad Hoc Network. IEEE Access 2019, 7, 173499–173514. [Google Scholar] [CrossRef]
- Wang, F.; Chen, Z.; Zhang, J.; Zhou, C.; Yue, W. Greedy Forwarding and Limited Flooding based Routing Protocol for UAV Flying Ad-Hoc networks. In Proceedings of the 2019 IEEE 9th International Conference on Electronics Information and Emergency Communication (ICEIEC), Beijing, China, 12–14 July 2019; pp. 1–4. [Google Scholar]
- Gankhuyag, G.; Shrestha, A.P.; Yoo, S.-J. Robust and Reliable Predictive Routing Strategy for Flying Ad-Hoc Networks. IEEE Access 2017, 5, 643–654. [Google Scholar] [CrossRef]
- Toorchi, N.; Hu, F.; Bentley, E.S.; Kumar, S. Skeleton-Based Swarm Routing (SSR): Intelligent Smooth Routing for Dynamic UAV Networks. IEEE Access 2021, 9, 1286–1303. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Poudel, S.; Moh, S. Medium Access Control Protocols for Flying Ad Hoc Networks: A Review. IEEE Sens. J. 2021, 21, 4097–4121. [Google Scholar] [CrossRef]
- Chaker, B.M.; Amine, R.M.; Aimad, A. A summary of the existing challenges in the design of a routing protocol in UAVs network. In Proceedings of the 2020 2nd International Workshop on Human-Centric Smart Environments for Health and Well-being (IHSH), Boumerdès, Algeria, 9–10 February 2021; pp. 59–64. [Google Scholar] [CrossRef]
- Sang, Q.; Wu, H.; Xing, L.; Xie, P. Review and Comparison of Emerging Routing Protocols in Flying Ad Hoc Networks. Symmetry 2020, 12, 971. [Google Scholar] [CrossRef]
- Yahuza, M.; Idris, M.Y.I.; Bin Ahmedy, I.; Wahab, A.W.B.A.; Nandy, T.; Noor, N.M.; Bala, A. Internet of Drones Security and Privacy Issues: Taxonomy and Open Challenges. IEEE Access 2021, 9, 57243–57270. [Google Scholar] [CrossRef]
- Chamola, V.; Kotesh, P.; Agarwal, A.; Gupta, N.; Guizani, M. A Comprehensive Review of Unmanned Aerial Vehicle Attacks and Neutralization Techniques. Ad Hoc Netw. 2021, 111, 102324. [Google Scholar] [CrossRef]
- Alladi, T.; Chamola, V.; Sahu, N.; Guizani, M. Applications of blockchain in unmanned aerial vehicles: A review. Veh. Commun. 2020, 23, 100249. [Google Scholar] [CrossRef]
- Li, Y.; Wang, S.; Jin, C.; Zhang, Y.; Jiang, T. A Survey of Underwater Magnetic Induction Communications: Fundamental Issues, Recent Advances, and Challenges. IEEE Commun. Surv. Tutor. 2019, 21, 2466–2487. [Google Scholar] [CrossRef]
- Luo, J.; Chen, Y.; Wu, M.; Yang, Y. A Survey of Routing Protocols for Underwater Wireless Sensor Networks. IEEE Commun. Surv. Tutor. 2021, 23, 137–160. [Google Scholar] [CrossRef]
- Wang, M.M.; Zhang, J.; You, X. Machine-Type Communication for Maritime Internet of Things: A Design. IEEE Commun. Surv. Tutor. 2020, 22, 2550–2585. [Google Scholar] [CrossRef]
- Ohki, T.; Nakatani, T.; Nishida, Y.; Thornton, B. Unmanned Seafloor Survey System Without Support Vessel and its Recent Operations in Sea Trials. In Proceedings of the 2019 IEEE Underwater Technology (UT), Kaohsiung, Taiwan, 16–19 April 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Hashmani, M.A.; Umair, M.; Rizvi, S.S.H.; Gilal, A.R. A Survey on Edge Detection based recent Marine Horizon Line Detection Methods and their Applications. In Proceedings of the 2020 3rd International Conference on Computing, Mathematics and Engineering Technologies (iCoMET), Sukkur, Pakistan, 29–30 January 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Karimi, H.R.; Lu, Y. Guidance and control methodologies for marine vehicles: A survey. Control Eng. Pract. 2021, 111, 104785. [Google Scholar] [CrossRef]
- Jouhari, M.; Ibrahimi, K.; Tembine, H.; Ben-Othman, J. Underwater Wireless Sensor Networks: A Survey on Enabling Technologies, Localization Protocols, and Internet of Underwater Things. IEEE Access 2019, 7, 96879–96899. [Google Scholar] [CrossRef]
- Fattah, S.; Gani, A.; Ahmedy, I.; Idris, M.Y.I.; Hashem, I.A.T. A Survey on Underwater Wireless Sensor Networks: Requirements, Taxonomy, Recent Advances, and Open Research Challenges. Sensors 2020, 20, 5393. [Google Scholar] [CrossRef] [PubMed]
- Jiang, L.; Ke, S.Q.; Zhang, L. Research on Key Technologies of Topology Control in Mobile Predictive Ad Hoc Networks. In Proceedings of the 2020 International Conference on Wireless Communications and Smart Grid (ICWCSG), Qingdao, China, 12–14 June 2020; pp. 190–194. [Google Scholar] [CrossRef]
- Yanmaz, E.; Kuschnig, R.; Bettstetter, C. Channel measurements over 802.11a-based UAV-to-ground links. In Proceedings of the 2011 IEEE GLOBECOM Workshops (GC Wkshps), Houston, TX, USA, 5–9 December 2011; pp. 1280–1284. [Google Scholar] [CrossRef]
- Clapper, J.; Young, J.; Cartwright, J.; Grimes, J. Unmanned Systems Roadmap 2007–2032; Tech. Rep.; United States. Department of Defense: Arlington, VA, USA, 2007. [Google Scholar]
- Al-Absi, M.A.; Al-Absi, A.A.; Lee, H.J. V2V communication modeling for environmental channel throughput and radio propagation. In Proceedings of the 8th IEEE International Conference on ICTC Convergence, Jeju Island, Korea, 18–20 October 2017; pp. 507–512. [Google Scholar]
- Al-Absi, M.A.; Al-Absi, A.A.; Kang, Y.J.; Lee, H.J. Obstacles Effects on Signal Attenuation in Line of Sight for Different Environments in V2V. In Proceedings of the 20th International Conference on Advanced Communication Technology (ICACT), Chuncheon-si, Korea, 11–14 February 2018; pp. 17–20. [Google Scholar]
- Al-Absi, M.A.; Al-Absi, A.A.; Lee, H.J. Performance Analysis for City, Highway, and Rural Area in Vehicle-to-Vehicle Network. In Proceedings of the 8th IEEE International Conference on ICTC Convergence, Jeju Island, Korea, 17–19 October 2018. [Google Scholar]
- Anderson, B.; Fidan, B.; Yu, C.; Walle, D. UAV formation control: Theory and application. In Recent Advances in Learning and Control; Blondel, V., Boyd, S., Kimura, H., Eds.; Lecture Notes in Control and Information Sciences; Springer: Berlin/Heidelberg, Germany, 2008; Volume 371, pp. 15–33. [Google Scholar]
- Al-Absi, M.A.; Kamolov, A.; Al-Absi, A.A.; Sain, M.; Lee, H.J. IoT Technology with Marine Environment Protection and Monitoring. In Proceedings of the International Conference on Smart Computing and Cyber Security, SMARTCYBER 2020, Lecture Notes in Networks and Systems, Goseong, Korea, 23–24 April 2020; Volume 149. [Google Scholar]
- Al-Absi, M.A.; Kamolov, A.; Al-Absi, A.A.; Lee, H.J. Secure Marine Communication Under Distributed Slotted MAC. In Proceedings of the International Conference on Smart Computing and Cyber Security, SMARTCYBER 2020, Lecture Notes in Networks and Systems, Goseong, Korea, 23–24 April 2020; Volume 149. [Google Scholar]
- Kamolov, A.A.; Park, S. Prediction of Depth of Seawater Using Fuzzy C-Means Clustering Algorithm of Crowdsourced SONAR Data. Sustainability 2021, 13, 5823. [Google Scholar] [CrossRef]
- Kamolov, A.; Park, S. An IoT-Based Ship Berthing Method Using a Set of Ultrasonic Sensors. Sensors 2019, 19, 5181. [Google Scholar] [CrossRef] [Green Version]
- Raw, R.S.; Lobiyal, D.K.; Das, S. An Analytical Approach to Position-Based Routing Protocol for Vehicular Ad Hoc Networks. Commun. Comput. Inform. Sci. 2012, 335, 147–156. [Google Scholar]
- Misra, S.; Xue, G.; Bhardwaj, S. Secure and Robust Localization in a Wireless Ad Hoc Environment. IEEE Trans. Veh. Technol. 2008, 58, 1480–1489. [Google Scholar] [CrossRef]
- Wang, J.; Ghosh, R.K.; Das, S.K. A survey on sensor localization. J. Control Theory Appl. 2010, 8, 2–11. [Google Scholar] [CrossRef]
- Ahn, H.-S.; Won, C.-H. DGPS/IMU integration-based geolocation system: Airborne experimental test results. Aerosp. Sci. Technol. 2009, 13, 316–324. [Google Scholar] [CrossRef]
- Wong, A.K.-S.; Woo, T.K.; Lee, A.T.-L.; Xiao, X.; Luk, V.W.-H.; Cheng, K.W. An AGPS-based elderly tracking system. In Proceedings of the 2009 First International Conference on Ubiquitous and Future Networks, Hong Kong, China, 7–9 June 2009. [Google Scholar]
- Official U.S. Government Information about the Global Positioning System (GPS) and Related Topics 2006. Available online: https://www.gps.gov/applications/marine/ (accessed on 27 December 2020).
Figure 1.
Types of ad hoc networks.

Figure 2.
Infrastructure-less Network.

Figure 3.
Characteristics of MANET.

Figure 4.
MANET routing protocol classification diagram.

Figure 5.
VANET Communication.

Figure 6.
VANET Architecture.

Figure 7.
Characteristics of VANET.

Figure 8.
VANET Classification routing protocol diagram.

Figure 9.
Flying Ad-Hoc Network (FANET).

Figure 10.
Characteristics of FANET.

Figure 11.
General classification of routing protocols.

Figure 12.
SANET architecture.

Figure 13.
SANET routing protocols classification diagram.


{kind=link}
{kind=link}
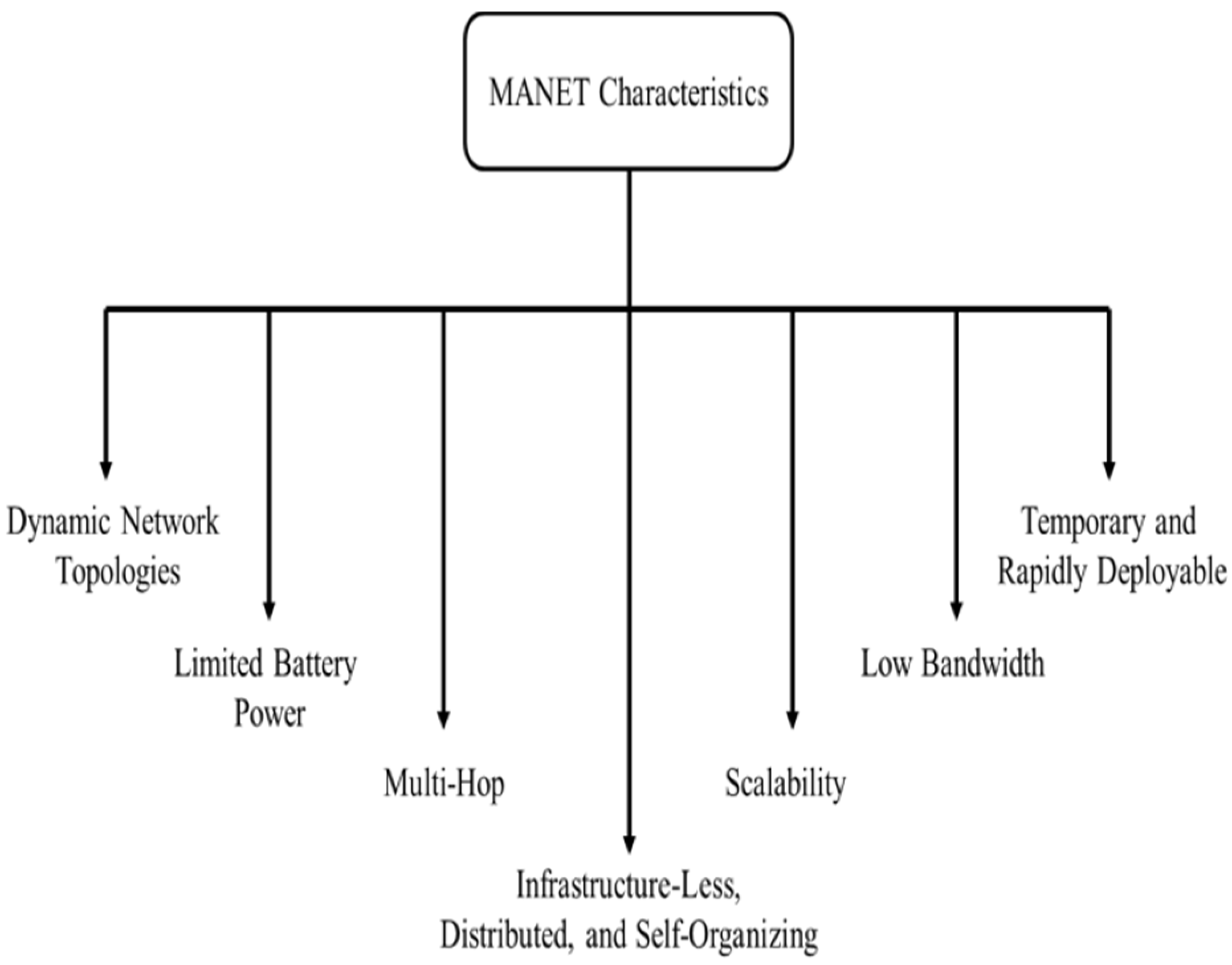{kind=link}
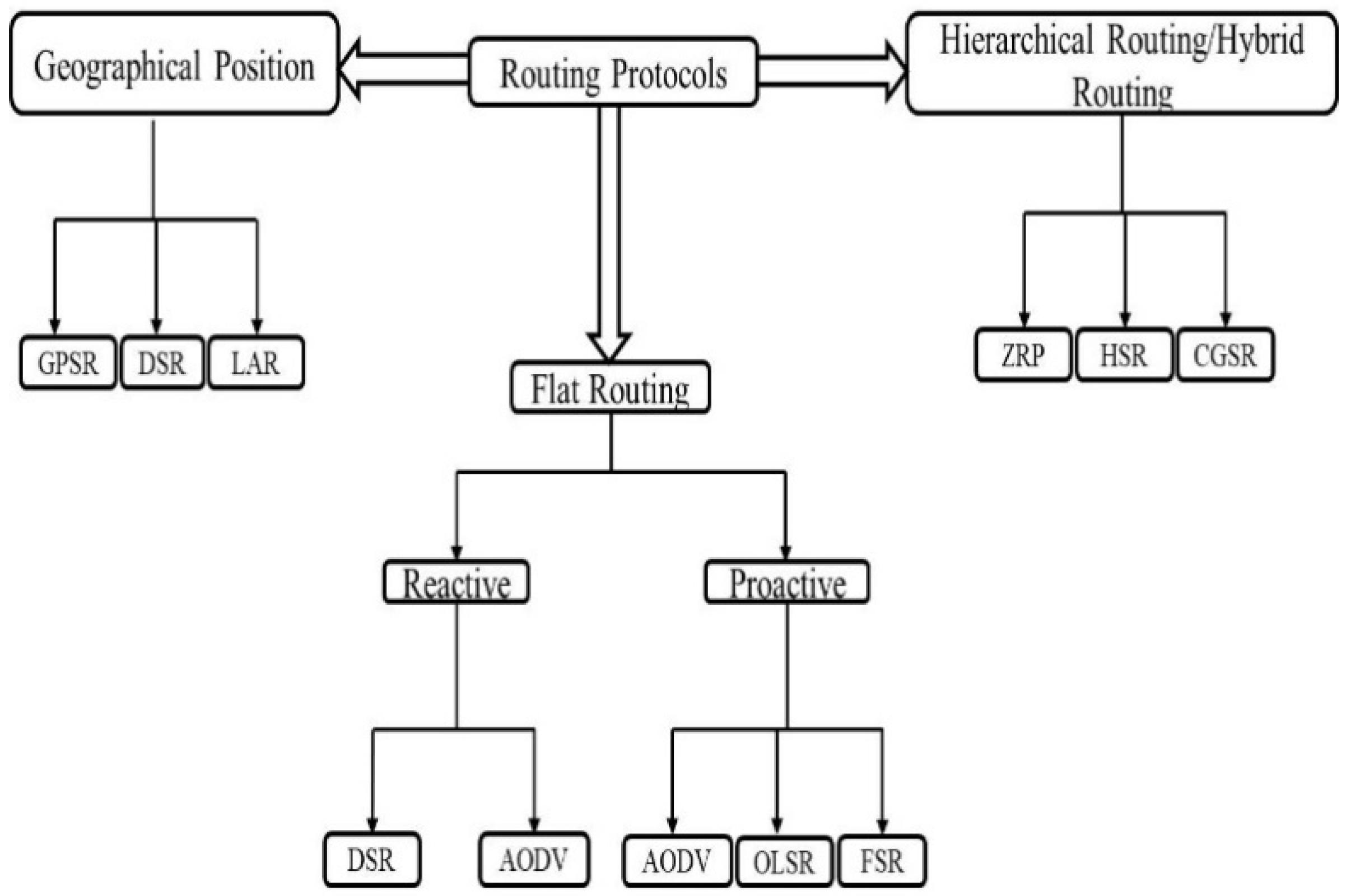{kind=link}
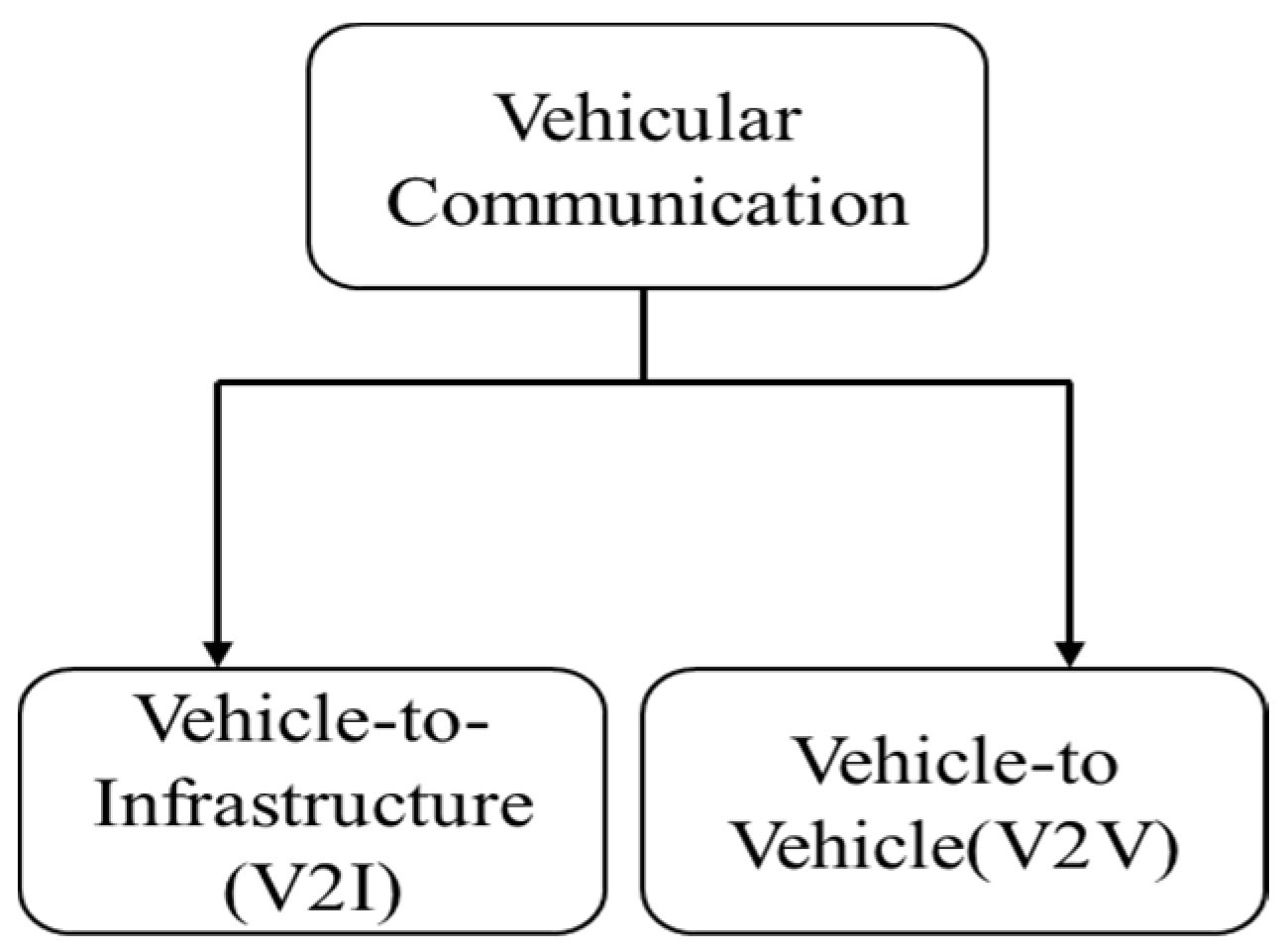{kind=link}
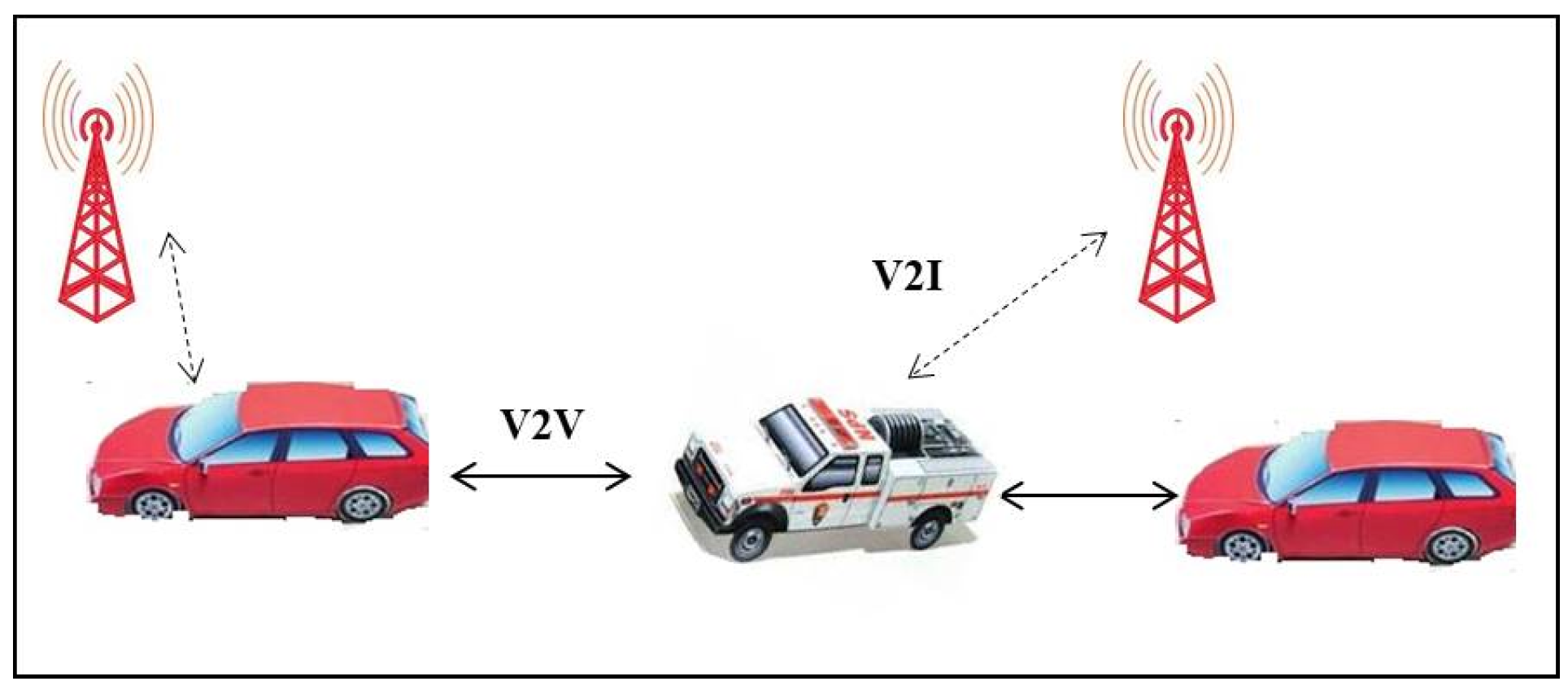{kind=link}
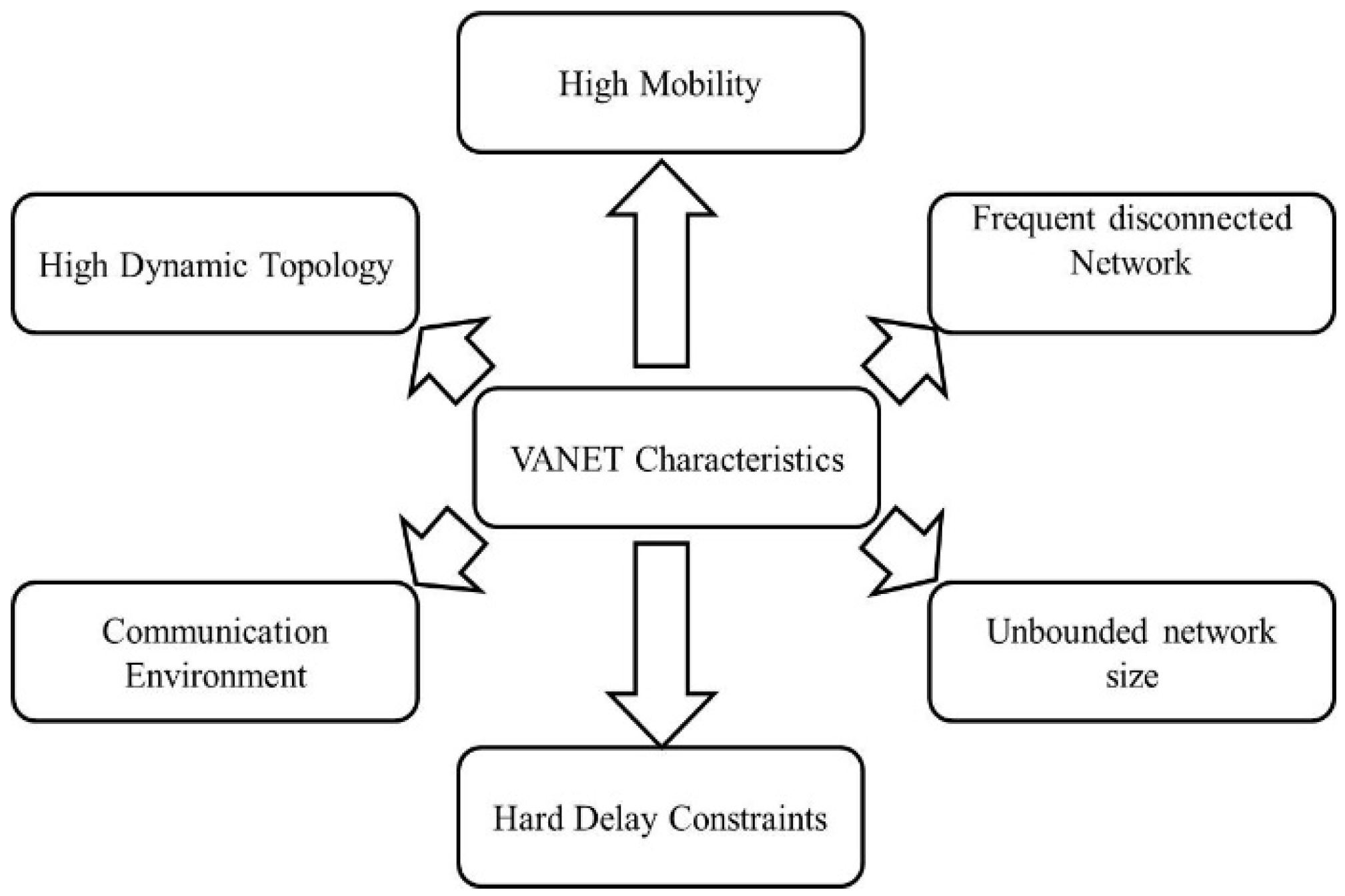{kind=link}
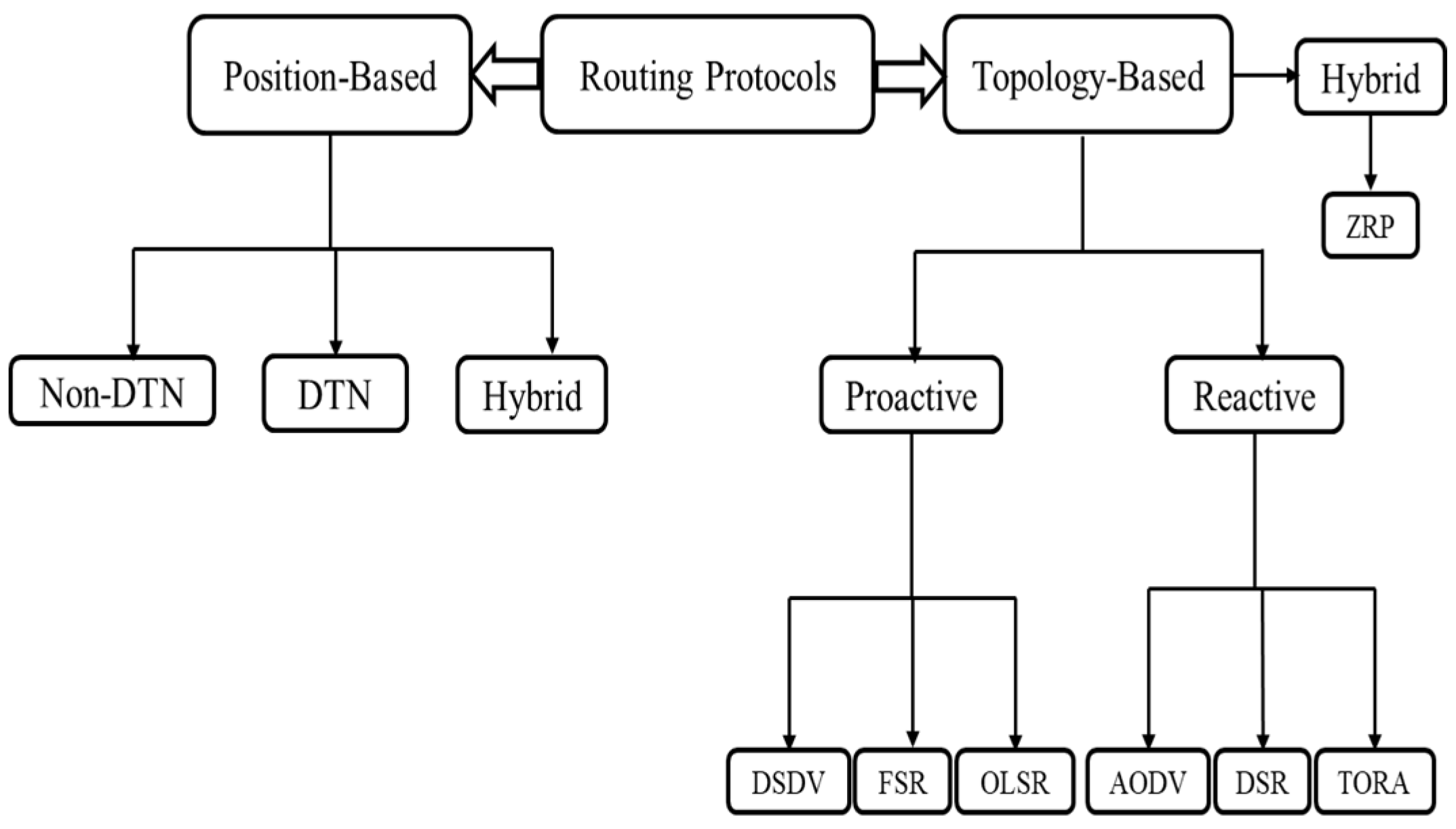{kind=link}
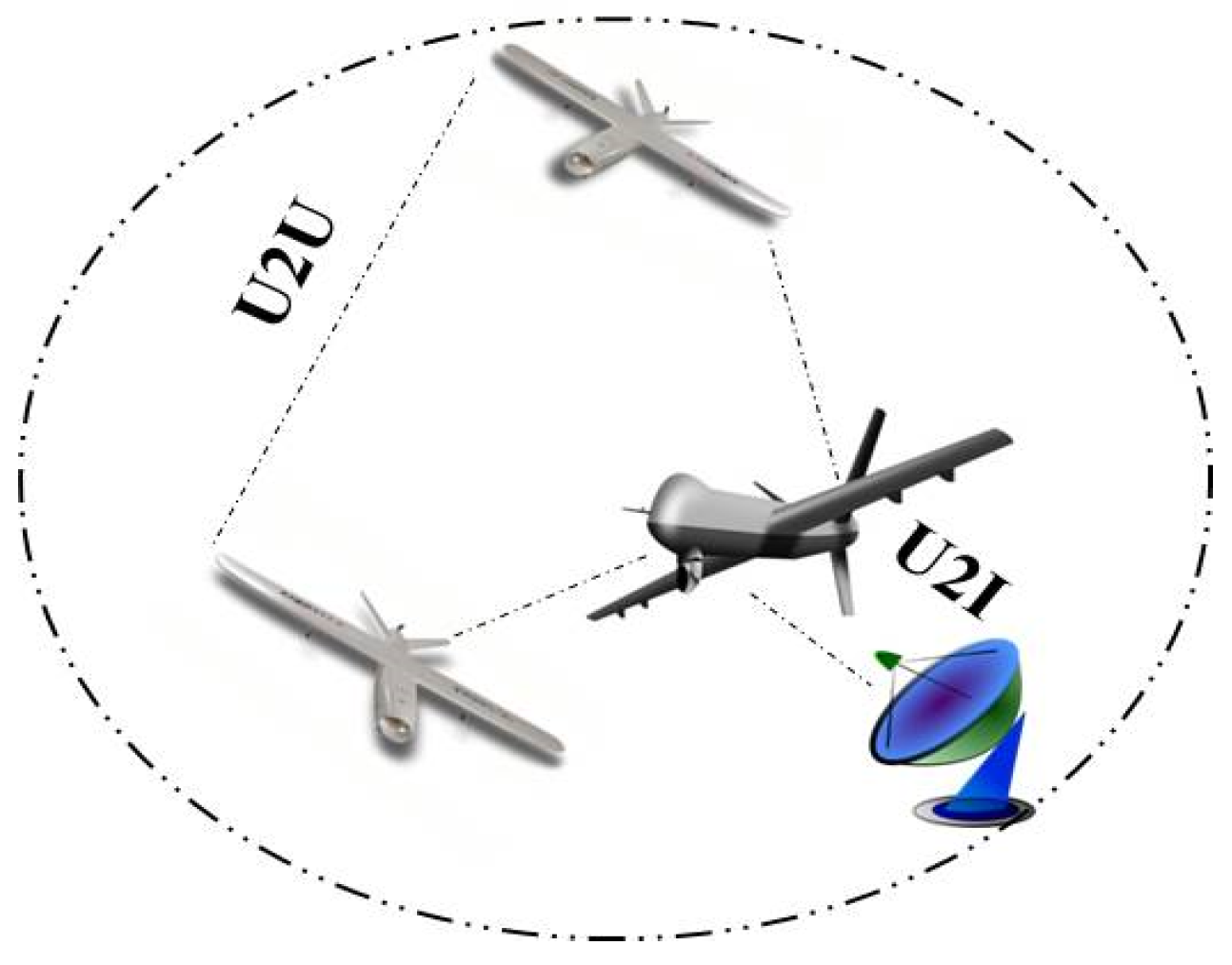{kind=link}
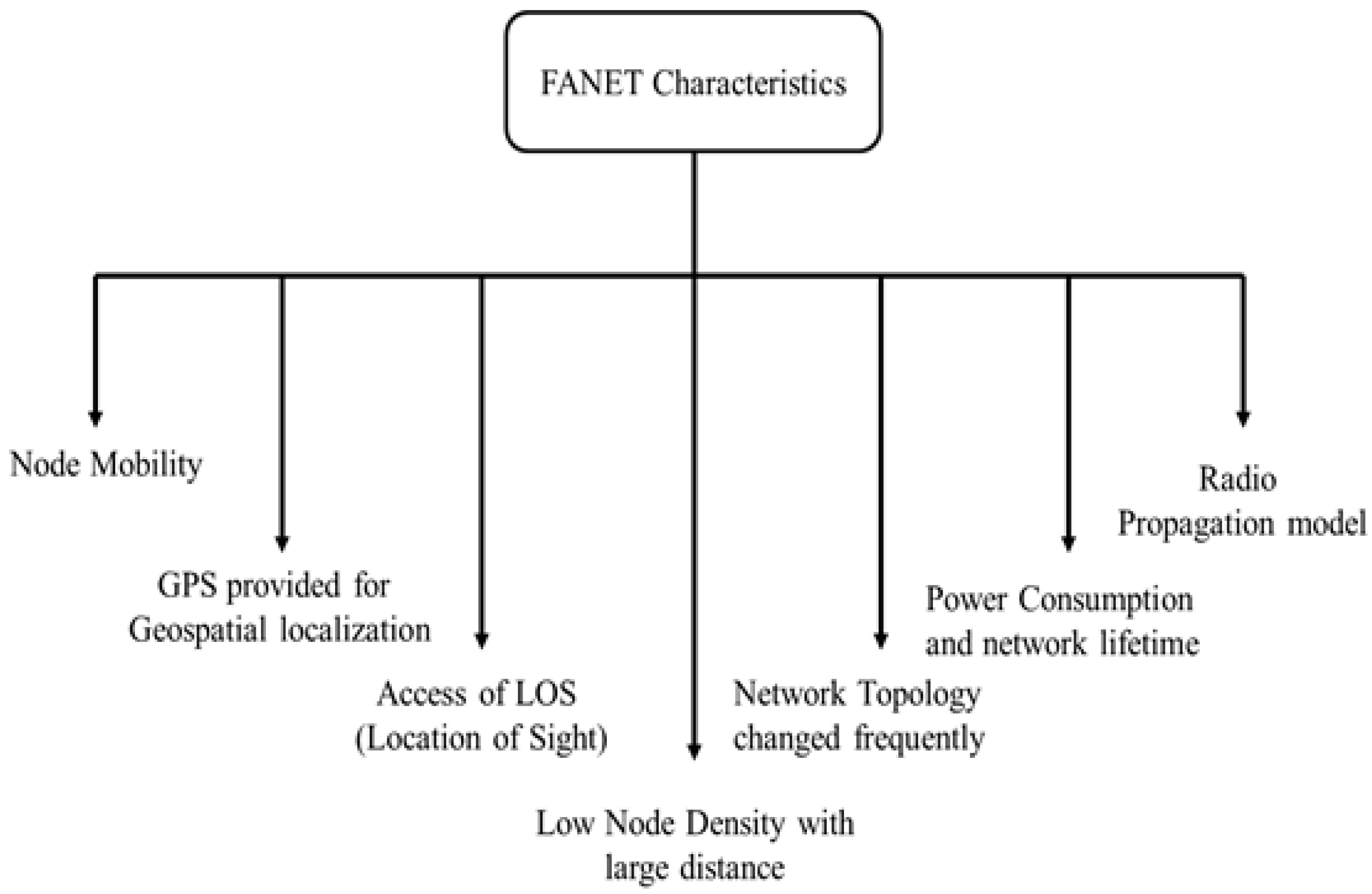{kind=link}
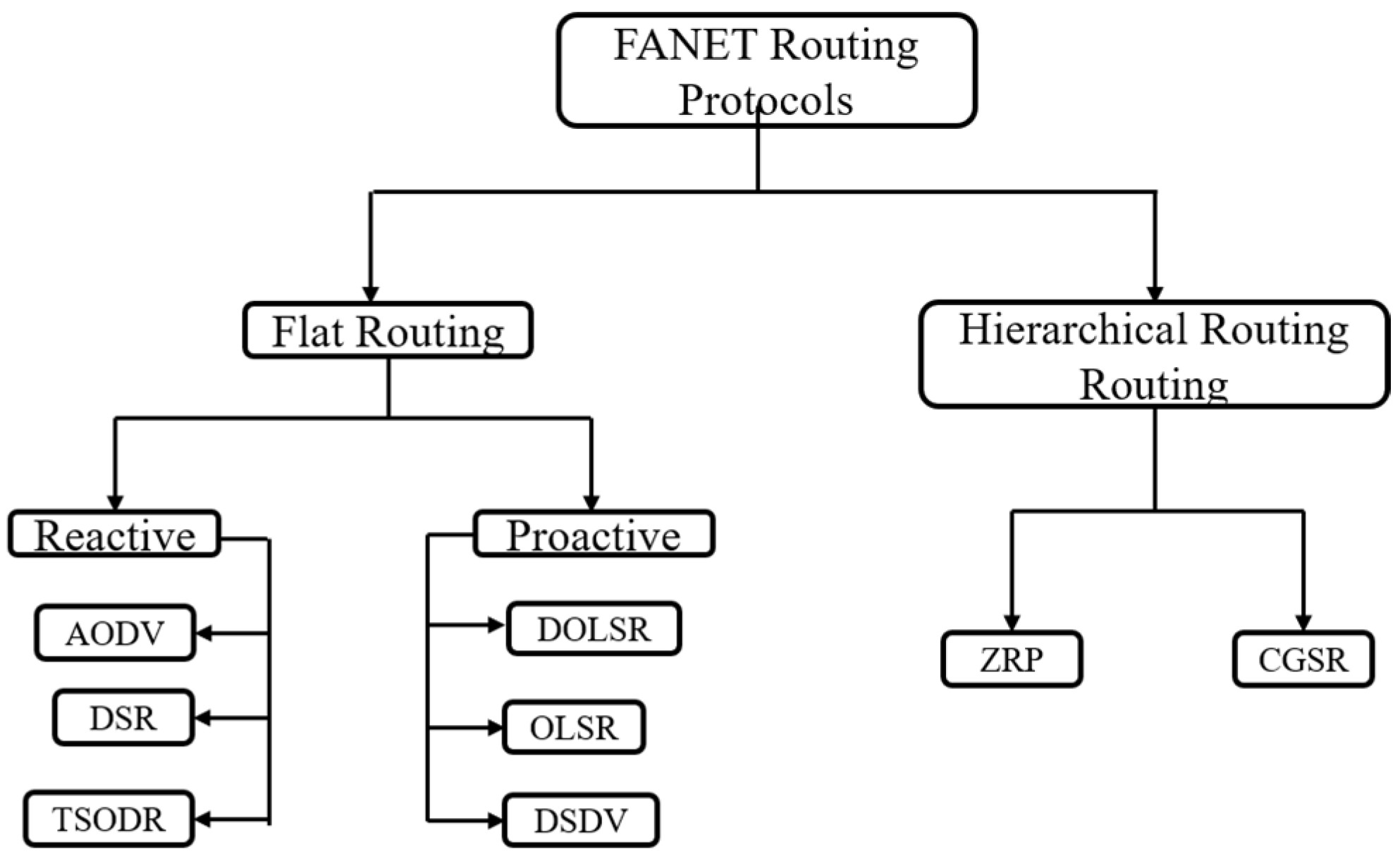{kind=link}
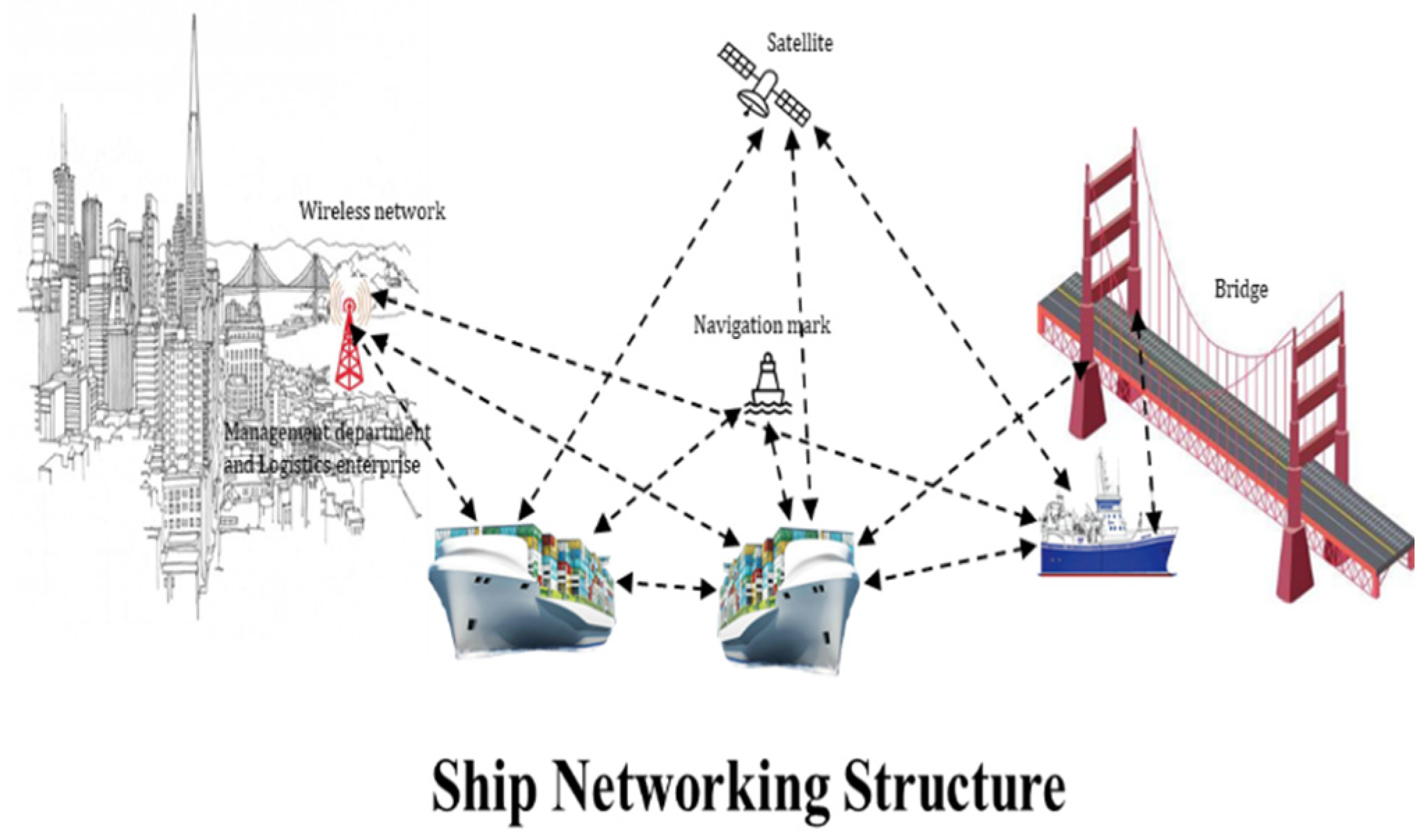{kind=link}
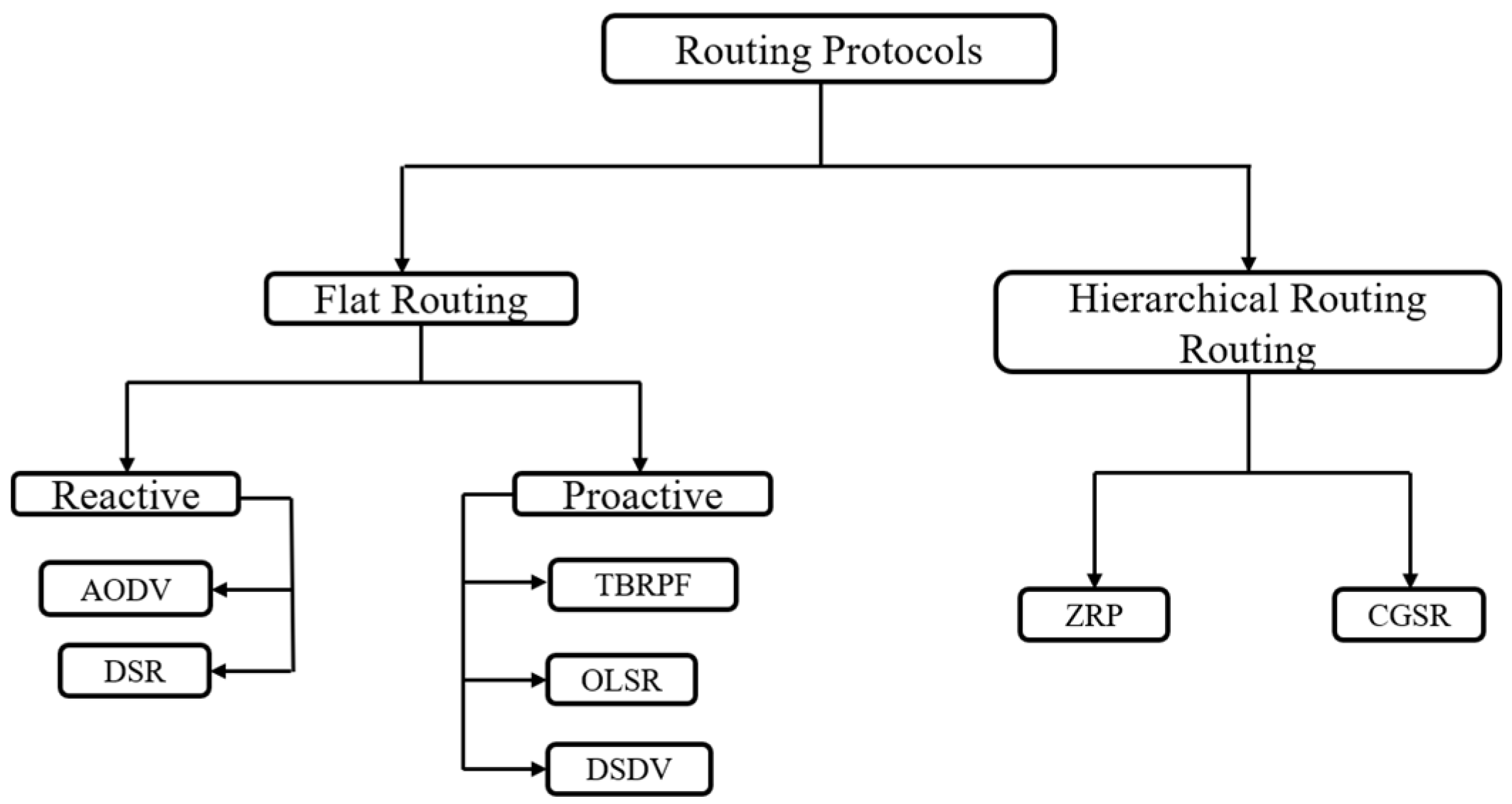{kind=link}
Table 1.
Summary of the existing surveys in MANET.
| Reference | Major Contribution | Year | |
|---|---|---|---|
| MANET | [1] | A survey on the performance of different routing protocols under Transmission Control Protocol (TCP) congestion control algorithms in MANET. | 2020 |
| [2] | A survey on different types of attacks and security issues to MANET layers, MANET topology | 2019 | |
| [3] | A survey summarizes existing excellent research to defog uncertainties regarding the practical implementation of MANETs | 2021 | |
| [4] | A survey of the use of mobility management systems analyzes the existing integrating of MANET with the internet. | 2020 | |
| [5] | A Survey on Power-Aware Optimization Solutions and design challenges for MANETs | 2020 | |
| [6] | A survey of the main types of attack at the network layer, protection mechanisms, detection algorithms in MANET | 2013 | |
| [7] | A survey of various techniques to solve the problem of energy efficiency and load balancing in MANET. | 2020 | |
| [8] | Comparative survey of security issues of MANET and the various methods, and prevent major attacks in MANET | 2019 | |
| [9] | Survey of Secure Routing Protocols for Wireless Ad Hoc Networks | 2020 |
Table 2.
Summary of the existing surveys in VANET.
| Reference | Major Contribution | Year | |
|---|---|---|---|
| VANET | [19] | A comprehensive overview of the resource allocation approach for VANETs, as well as challenges and opportunities. | 2021 |
| [20] | A Comparative Survey of Reinforcement Learning-based VANET routing algorithms | 2021 | |
| [21] | A comprehensive survey in the security of vehicular ad hoc networks, trust management, arracks, and security mechanisms. | 2020 | |
| [22] | A comprehensive Survey of Privacy Schemes and Authentication to different types of attacks in vehicular ad hoc Networks | 2020 | |
| [23] | A Survey of the inadequacies of existing trust and weaknesses establishment, management mechanisms, and some future challenges for trustworthy communication in VANET | 2020 | |
| [24] | A survey on the different authentication mechanisms and possible security attacks in VANETs | 2020 | |
| [25] | Exhaustive review based on wireless communication, Benefits, Recent Works, Security, Services, Challenges, and Use Cases for SDN-VANET | 2020 | |
| [26] | A survey of vehicular edge computing for architecture, mobility, applications, and research directions | 2019 | |
| [27] | Authentication schemes, privacy, security, architecture, and open challenges, in VANET | 2021 | |
| [28] | A Survey of Security Services, Attacks, and Applications for Vehicular Ad Hoc Networks | 2019 | |
| [29] | Communication, security and privacy, applications, and challenges in VANET | 2019 | |
| [30] | Architecture, security classification and solutions, challenges, and various simulators in VANET | 2019 | |
| [31] | A survey on Multi-Layer Problems and Solutions in VANETs | 2019 |
Table 3.
Advantages of using multi-UAV and single UAV.
| Feature | Multi-UAV | Single-UAV |
|---|---|---|
| Scalability | High | Limited |
| Antenna | Directional | Omni-directional |
| mission speed | Fast | Slow |
| Required bandwidth | Medium | High |
| Control complexity | High | Low |
| Failure effect | System can reconfigure | Mission fails |
| Topology | Direct, and simple connection | Complex topology |
| Survivability | High | Poor |
| Heterogeneous configuration | Applicable | Inapplicable |
| Coverage area | Large | Small |
Table 4.
Compression routing protocols for FANET.
| Reference | Routing Protocols | Routing Category | Metrics | Load Balancing | Communication Overhead | Computational Complexity |
|---|---|---|---|---|---|---|
| [54] | Stochastic Packet Algorithm (SPA) | Stochastic Forward | Link throughput, Link expiration information | No | Low | Low |
| [55] | Fountain-code based Greedy Queue and Position Assisted (FGQPA) | Store–carry–forward (SCF) | Queue backlog, Position information | Yes | High | High |
| [56] | Location-Aided Delay Tolerant Routing (LADTR) | Geographic, Store–carry–forward (SCF) | Position Information | No | Low | High |
| [57] | Link-quality and Traffic-load Aware Optimized Link-State Routing (LTA-OLSR) | Proactive | Link quality, Traffic load | Yes | High | High |
| [58] | Mobility and Load Optimized Link-State Routing (ML-OLSR) | Proactive | Stability degree of node, butter load | Yes | High | High |
| [59] | Predictive OLSR (P-OLSR) | Proactive | Relative speed- weighted ETX | No | High | High |
| [60] | SDN-based UAV communication for routing and topology management of flying ad hoc networks (STFANET) | Centralized SDN | Length of each link. | No | High | High |
| [61] | Particle Swarm Optimization—Greedy and Limited Flooding Routing (PSO-GLFR) | Geographic, Reactive | Distance, # neighbors, the Deflection angle | No | Low | High |
| [62] | Reliable and Predictive Routing Protocol (RARP) | Reactive | Hop, Failure prob., Connection time. | No | High | Low |
Table 5.
Summary of the existing surveys on FANET.
| Reference | Major Contribution | Year | |
|---|---|---|---|
| FANET | [64] | Investigates the existing MAC protocols for FANET, open issues, and research challenges discussed and summarized | 2021 |
| [65] | A summary of the existing challenges in the design of a routing protocol in a UAV network | 2021 | |
| [66] | A survey on the state-of-the-art routing protocols proposed in recent years, propose some unsolved problems for FANET routing | 2020 | |
| [67] | The recent trends in the security and privacy issues that affect the Internet of Drones, and open challenges. | 2021 | |
| [68] | A comprehensive survey of the limited research work of routing schemes in FANETs. Different aspects, including objectives, challenges, routing metrics, characteristics, and performance measures. | 2020 | |
| [68] | A literature review of UAVs, discuss the different types of UAVs, case studies, and military UAV incidents. | 2021 | |
| [69] | Review various applications of blockchain in UAV networks and discuss various challenges | 2020 | |
| [51] | A comprehensive survey presented the architecture, the mobility models, the constraints, the routing techniques, future challenge perspectives, and the simulation tools for FANETs. | 2019 |
Table 6.
Definition of Sea Area.
| Sear Area | Device | Communication Coverage | Technology |
|---|---|---|---|
| Sea Area A1 |  | (20–30 nautical miles) | VHF-MF/DSC |
| Sea Area A2 |  | (400 nautical miles) | MF/DSC |
| Sea Area A3 |  | North latitude 70 degrees-South Latitude 70 degree | INMARSAT/HF |
| Sea Area A4 |  | Worldwide | EPIRB/HF |
Table 7.
Marine communications system performance comparison.
| System | Advantage | Disadvantage |
|---|---|---|
| Maritime wireless communications | MF/HF, Medium/long distance, free of charge VHF, Visual range, free of charge | Narrow band access, low stability |
| Marine satellite communications | Wide area coverage, broadband access | High cost of equipment, high monthly fee |
| Shore-based mobile communications | Broadband access | Near shore coverage, charging by service time and amount of data |
Table 8.
Summary of the existing surveys on SANET.
| Reference | Major Contribution | Year | |
|---|---|---|---|
| SANET | [70] | Survey of the existing research on underwater Marine communications, reliability guarantee, classified as the four topics of channel modeling, range extension, and capacity enhancement in SANET | 2019 |
| [71] | The survey paper summarizes the underwater routing protocols proposed in recent years, the performance of different underwater routing protocols, and research challenges in SANET | 2021 | |
| [72] | A survey on interoperability, simplicity, and scalability for maritime services and IoT applications in SANET | 2020 | |
| [73] | Unmanned survey systems that consist of autonomous underwater vehicles, transporting AUVs roles between a survey site and shore base, and communication relaying between ground-based mission control and the AUVs. | 2019 | |
| [74] | comprehensive overview of edge detection based on recent marine horizon line detection, and challenging problem in SANET | 2020 | |
| [75] | A survey on marine vehicles with the guidance and control methodologies in SANET | 2021 | |
| [76] | Review in most used technologies for underwater networking, a trade-off between underwater properties, wireless communication technologies, and communication quality in SANET. | 2019 | |
| [77] | A Survey on Underwater Wireless Sensor Networks: Requirements, Taxonomy, Recent Advances, and Open Research Challenges in SAMET | 2020 |
Table 9.
Comparison of MVFS ad hoc networks.
| Mobile Ad-Hoc Network (MANETs) | Vehicular Ad-Hoc Networks (VANETs) | Flying Ad-Hoc Networks (FANETs) | Ship Ad-Hoc Networks (SANETs) | |
|---|---|---|---|---|
| Topology Change | Topology alters low | Topology alters fast | Topology alters is rapid and very fast | Topology alters medium |
| Radio Propagation | The radio propagation typical close to the ground | The radio propagation typical close to the ground | The radio propagation typical, not close to the ground | The radio propagation typical close to the ground |
| Power consumes | Power consumes low | Power consumes high | Power consumption is high for mini-UAV/Small UAV not needed. | Power consumes high |
| Power Computational | Limited | High | High | High |
| Mobility | Node/device mobility is low | Node/device mobility is high | Node/device mobility is very high | Node/device mobility isMedium |
| Mobility Model | The mobility model is random | The mobility model is regular | The mobility model is regular under the condition | The mobility model is random |
| Line of Sight | Not available for all cases | available in some cases | Available in most cases | available in some cases |
| Security |
|
|
|
|
| Localization | GPS | DGPS, GPS, AGPS | IMU, GPS, AGPS, and DGPS | GPS, DGPS |
| Density | Low | High | Very Low | High |
| Number of Nodes | High | Hight | Low | Low |
| Update topology | Not Often | Often | Often | Not Often |
| Routing Protocol | Proactive
| Proactive
| Proactive
| Proactive
|
| Simulator | OMNET++, NS-2, NS-3, GloMoSim, OPNET, QualNet | OMNET++, NS-2, NS-3, GloMoSim, OPNET, QualNet, SIMITS, MATLAB | OMNET++, NS-2, NS-3, GloMoSim, OPNET, QualNet, MATLAB | OMNET++, NS-2, NS-3, GloMoSim, OPNET, QualNet, MATLAB |
Table 10.
Comparison between long and short-range wireless communication technologies.
| DSRC-ETC | DSRC-IVC | WLAN | IR | WiMAX | GSM/GPRS | UMTS | |
|---|---|---|---|---|---|---|---|
| Technical standard | IEEE 802.11p | IEEE 802.11a/b/g | ISO 21214 | IEEE 802.16 | GSM | 3GPP | |
| Antenna type (MHz) | Roof antenna | Roof antenna | Roof antenna | Directional antenna | Smart Antenna (MIMO) | Roof antenna | Roof antenna |
| Spectrum range (MHz) | 5795~5815 (early: 902~928) | Europe: 5855~5925 United States: 5850~5925 Japan: 5770~5850 | 11a: 5 GHz (UNII) 11 b/g: 2.4 GHz (ISM) | 800~1000 nm | 2~66 GHz can be User choice | Europe: 900/1800 United States: 850/1900 | Europe: 900/2100 United States: 850/1700/1900 |
| Channel bandwidth | 4 × 5 MHz or 2 × 10 MHz | Control channel: 1 × 10 MHz Service channel: 6 × 10 MHz | 20 MHz | 4 independent channels | - | 124 × 200 kHz 8-time slots/carrier frequency | 5 MHz |
| Equivalent omnidirectional Radiated power | ≤33 dBm | Roadside node: ≤44.8 dBm Vehicle node: ≤33 dBm | 17 dBm/MHz ≤30 dBm | - | Depending on the frequency range used | (MS) ≤ 2 W(850/900) ≤1 W(1800/1900) | Power Control |
| Data rate (kbps) | Downstream: 500 Upstream: 250 | 3000~27,000 Typical rate: 6000 | 802.11 a/g: ≤54,000 802.11 b: ≤11,000 | 1000~2000 | ≤70,000 Typical rate: 10,000 | (GPRS) Downstream: 60~80 Upstream: 20~40 | Car environment: 384 |
| Communication distance(m) | 3~15 | ≤1000 | Access point Coverage | 1~100 Typical distance: 7 | Access point Coverage Maximum: 50 km | Base station Coverage Maximum: 35 km | Dependent on base station coverage maximum: 2 km |
| Connection establishment time(ms) | 5~12 | Self-organizing | - | 10 | Connection delay Support for handoff | Network access time: 10 s Support for handoff | Network access time: 2.12 s Support for handoff |
| System response time(ms) | 10 | Depending on the specific implementation | Depending on the specific implementation | 10 | Depending on the specific implementation | 500~700 | 200~300 |
| Channel access mechanism | TDMA | EDCA (~802.11 e) | CSMA | TDMA | OFDMA | TDMA | CDMA |
| Priority or QoS support | No priority QoS support | 4 service levels No real-time support | Priority support No QoS/RT support | CALM~IR support 8 Different priorities | QoS depends on it Distance to AP | No QoS support | QoS depends on it Distance to BS |
| Communication mode | Directional duplex asymmetry Broadcast, no P2P | Omnidirectional duplex symmetry Broadcast/unicast/multicast | Omnidirectional duplex symmetry Broadcast, no P2P | Directional duplex symmetry Broadcast/unicast/multicast | Omnidirectional duplex asymmetry Limited broadcast, no P2P | Omnidirectional duplex asymmetry No broadcast, no P2P | Omnidirectional duplex asymmetry Limited broadcast, no P2P |
| system requirement | Roadside equipment | GPS (but not mandatory) | Access point device | Line-of-sight directional antenna | Access point device | Base station equipment | Base station equipment |
| Main source of interference | DSRC-IVC | DSRC-ETC WLAN 5 GHz | DSRC-IVC | Visible light, rain, snow | Depends on use Frequency range | Reserved frequency band | Reserved frequency band |
Table 11.
Simulation tools for ad hoc networks.
| Simulator | Open-Source | Free | Language | Features | Website |
|---|---|---|---|---|---|
| OMNET++ | Yes | Yes | NED/C++ | Wired, Wireless ad hoc, routing traffic in the network, easy debugging, and traceability of simulation models, turn off the graphical user interface altogether, and run the simulation as a pure command-line program | http://www.omnetpp.org, (accessed on 3 December 2020) |
| NS-2 | Yes | Yes | OTCL/C++ | Wired, TCP, wireless ad hoc, AODV, DSR, DSDV, satellite, UDP | https://www.isi.edu/nsnam/ns/, (accessed on 17 December 2020) |
| NS-3 | Yes | Yes | C++/Python | IP and Non-IP based network Wired, Wireless ad hoc, OSLR, WSN, IPv6, AODV, DSR, IPv4, DSDV | https://www.nsnam.org/, (accessed on 4 January 2021) |
| GloMoSim | Yes | Yes | C/PABSEC | Wireless, WSN, ad hoc, distributed Bellman-Ford, Flooding, Fisheye, DSR, DSDV, WRP, LAR, NS-DSDV, DREAM, MMWN | http://en.pudn.com/Download/item/id/1137018.html, (accessed on 8 January 2021) |
| OPNET | No | No | C++ | Wireless ad hoc, Cellular, WLAN, Satellite, IPv6, TCP, VoIP, OSPF, grid computing, ad hoc networks | https://opnetprojects.com/opnet-network-simulator/, (accessed on15 January 2021) |
| SUMO | Yes | Yes | C++ | Wired, wireless ad hoc, Vehicle speed, Vehicle insertion, Vehicle permissions (access restrictions), Intersection dynamics, Randomness, Routing and Re-routing, Sublane Model, Opposite Direction Driving, Safety, Mesoscopic model, Lengths and Distances | https://sumo.dlr.de/docs/index.html, (accessed on 21 February 2021) |
| QualNet | No | No | PABSEC | MANET, Wired, Cellular, Satellite, Models in parallel environments can improve speed and scalability, support multiple parallel computing environments, the protocol model is pre-optimized, Designed from the beginning as a tool with parallel processing capabilities. | https://www.scalable-networks.com/products/qualnet-network-simulation-software-tool/, (accessed on 28 February 2021) |
| SIMITS | Yes | Yes | C# | Communications simulator in the field of Intelligent Transportation Systems (ITS). It can simulate and measure the performance of different medium access control mechanisms (MAC), including the following: Slotted aloha, RR-Aloha | https://github.com/neur0nid/SIMITS, (accessed on 25 March 2021) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Al-Absi, M.A.; Al-Absi, A.A.; Sain, M.; Lee, H. Moving Ad Hoc Networks—A Comparative Study. Sustainability 2021, 13, 6187. https://doi.org/10.3390/su13116187
AMA Style
Al-Absi MA, Al-Absi AA, Sain M, Lee H. Moving Ad Hoc Networks—A Comparative Study. Sustainability. 2021; 13(11):6187. https://doi.org/10.3390/su13116187
Chicago/Turabian StyleAl-Absi, Mohammed Abdulhakim, Ahmed Abdulhakim Al-Absi, Mangal Sain, and Hoonjae Lee. 2021. "Moving Ad Hoc Networks—A Comparative Study" Sustainability 13, no. 11: 6187. https://doi.org/10.3390/su13116187
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.