
An Adaptive Traffic-Calming Measure and Effectiveness Evaluation in a Large Urban Complex of Shanghai, China


1
Key Laboratory of Road and Traffic Engineering of the Ministry of Education, Tongji University, Shanghai 201804, China
2
Frontiers Science Center for Intelligent Autonomous Systems, Tongji University, Shanghai 201210, China
3
Shanghai Jinqiao (Group) Co., Ltd., Shanghai 201206, China
*
Author to whom correspondence should be addressed.
Sustainability 2022, 14(20), 13023; https://doi.org/10.3390/su142013023
Submission received: 12 August 2022
/
Revised: 2 October 2022
/
Accepted: 6 October 2022
/
Published: 12 October 2022
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:The rapid development of the motor vehicle brings convenience to our life; however, it also increases the burden on traffic networks and the environment, especially when road space is limited. Traffic calming has proved to be an effective solution for the improvement of traffic safety and travel quality. However, most traffic-calming measures are investigated and carried out without any adaptive ability. Such measures cannot adapt to changing traffic requirements. There is a mismatch between static measures and dynamic traffic. In this study, we propose an adaptive traffic-calming measure using deep reinforcement learning. Traffic volume is controlled at intersections according to the state of dynamic traffic. Then, we take a large urban complex (the Jinding nine-rectangle-grid area) in Shanghai, China, as an example. Further, based on applied static traffic-calming measures, we consider the characteristics of the nine plots, along with traffic demand, to design traffic-calming measures. Finally, the effectiveness of the measures is evaluated in SUMO (Simulation of Urban Mobility). The experimental results show that the proposed measure can increase driving speed under the speed limit and reduce traffic volume in a peak period. The results indicate that the proposed measure is an effective and novel solution for traffic calming in the large urban complex.
1. Introduction
With the development of urban transportation, the number of motor vehicles continues to rise and cause congestion [1]. Road network planning and design often focuses on the efficiency and driving experience of motor vehicles, while the feelings of pedestrians and non-motorized travelers are often ignored. Due to limited road space, the space for slow traffic is often compressed. However, the travel experience of slow traffic is crucial in the improvement of life quality [2]. The design of urban transportation should be people-oriented. Compared to common urban roads, the requirement of slow-traffic improvement in a large complex is more prominent. The mixed traffic of motor vehicles, pedestrians, and non-motorized vehicles in limited road space leads to potential safety risks [3]. The complicated land use (e.g., office, resident, school, hospital, entertainment, and commerce) generates various travel demands [4]. Meanwhile, with the development of an urban economy, more and more people pursue a high-quality and colorful life. They are yearning for convenient urban transportation and looking forward to a safe and livable community. It is necessary to calm traffic and provide a safe and comfortable travel experience for all travelers.
Traffic calming aims to reduce the negative impact of motor vehicles on urban traffic through physical and engineering measures [5,6]. Traffic-calming measures can be combined with traffic-management measures to improve the overall traffic environment [7]. In this way, the speeds of vehicles are reduced, and a comfortable environment is provided for pedestrians and non-motorized vehicles [8]. Conventional traffic-calming measures focus on safety improvement via speed and flow reduction [9,10,11,12]. Meanwhile, traffic calming contributes to a lessening of noise, pollution, and fuel consumption [13].
A commonly used longitudinal speed-control measure is to combine a protruding area on the road’s surface (e.g., speed humps and bumps) with a striking appearance to attract the attention of drivers for speed reduction [14,15]. Although the physical deceleration facility can effectively reduce the speed of road sections, it has a negative impact on ride comfort, especially when the physical deceleration facility is continuously set up. In addition, longitudinal speed-control measures can be incorporated with road design. For example, Solowczuk, A. verified the effectiveness of chokers combined with mid-block crosswalks, bollards, and concrete planters [13], though the speed reduction is small. Paszkowski, J. et.al. introduced road infrastructure to reduce driving speed and traffic volume [7]. However, such longitudinal speed control measures have high manufacture and maintenance costs, which are not suitable for large-scale promotion and application in cities. Lateral deceleration measures usually require major changes to the road design, such as compressing the width of road sections and intersections, changing the route shape of the road, designing circular intersections, and setting up circular traffic islands. Since most lateral deceleration measures reduce road traffic space and easily cause road traffic congestion during peak hours, this method is not suitable for an urban complex with large travel demand.
Flow control measures are typically set up with road closures, traffic islands, and dividers. Road closure is used to reduce motor vehicles and crossing traffic by setting obstacles at intersections. Small traffic islands at intersections can restrict vehicles from turning in a specific direction, while a medial divider can prevent motor vehicles from crossing and left turns. In traditional flow control measures, road closure can effectively reduce motor vehicles and is easy to implement. For urban transportation, travel demand and traffic volume are dynamically changing [16,17], but traditional road closure measures rely on managers’ understanding of traffic systems. Management lacks flexibility and cannot be applied in a large urban complex with dynamic traffic. Though flow control reduces traffic volume in the immediate area, it may lead to an increase in motor vehicles in other areas. Thus, flow control measures should be targeted and must be rationally planned based on land-use pattern analysis and traffic demand prediction.
During the implementation of traffic-calming measures, it is necessary to reduce the impact on residents’ lives as much as possible on the premise of safety [9]. In addition to the above standardized traffic-calming measures, other types of measure include the installation of signs, markings, roadblocks, whitewashed lanes, and road shoulders. However, all of the measures mentioned above are static. In practice, traffic demand dynamically changes throughout the day. For example, traffic congestion often generates during peak hours with low driving speeds and high traffic volume, while vehicles can drive with relatively high speeds in flat hours. In such a case, a traffic-calming measure is required to reduce traffic volume during peak hours. Meanwhile, the measure should be adaptive to the changing environment and applied with existing road infrastructure. Indeed, traffic volume control eases traffic congestion and may result in higher driving speeds, which seems to violate the main idea of traffic calming. In fact, traffic volume control can provide safe and comfortable spaces for slow traffic. Generally, more than one traffic-calming measure is carried out simultaneously. For example, Balant, M. and Lep, M. carried out comprehensive traffic-calming redesign and verified the effectiveness using survey data before and after the redesign [5]. Thus, conventional speed limit measures can be used with traffic-volume control. In such a way, driving efficiency is improved under the speed limit. Meanwhile, with the development of sensing, communication, decision, and control technologies [18,19,20,21], dynamic traffic information can be detected in real-time, which provides a condition for traffic volume control.
In this study, we focus on a traffic-calming problem in a large urban complex. The study aims to provide a safe and comfortable travel experience for motor vehicles, pedestrians, and non-motorized vehicles. To solve the problem, we propose an adaptive traffic volume control to limit the number of vehicles in the complex.
The remainder of the paper is organized as follows. Section 2 introduces the Jinding nine-rectangle-grid area and proposes an adaptive traffic-calming measure for the Jinding area using DRL-based traffic volume control. Section 3 shows the training and testing performance of the traffic volume control model at a T-shaped intersection in the Jinding area. Section 4 summarizes the findings of this paper and suggests future research directions.
2. Materials and Methods
2.1. Jinding Nine-Rectangle-Grid Area Introduction
The Jinding nine-rectangle-grid area is a large urban complex located in Shanghai, China. The Jinding area is located in the north of Pudong New Area with the Outer Ring Canal in the east, Jufeng Road in the south, Shenjiang Road in the west, and Zhaojiagou in the north. The planning area of the Jinding area is 202 hectares. The Jinding area provides people with fast transportation, efficient work space, a high-end reception area, and multi-level retail space, aiming to create an unrepeatable “super precinct”. As shown in Figure 1, the Jinding area contains a total of nine plots (number from 13 to 21 in the planning), integrating commerce, office, resident, education, and entertainment space. Specifically, more than 85% of the land in the Jinding area is used for commerce. The average plot ratio of the Jinding area is 3.25. The Jinding area has the characteristics of a high development intensity structure dominated by commercial land. In this large urban complex, we would like to provide people with more practical communication space, accelerate the cohesion of art culture and urban vitality, and improve the quality of interactions between people. Thus, the “Super Ring Corridor” (see Figure 1 in the lower left corner) in the Jinding area connects the commercial land and public square of the four plots to provide a broad space for slow traffic.
As shown in Figure 2, the Jinding area is externally connected to Shenjiang Road and Jufeng Road, which have a large traffic volume. In the Jinding area, there are many internal access roads. The internal Hanqiao Road, Zhiqiao Road, Shentao Road, and Shenqi Road are connected vertically and horizontally. Specifically, all the roads in the Jinding area contain two-way double lanes. The smallest road width is only 20 meters, and the length of the road section is about 200 meters, indicating that the road space is limited. The four roads in the Jinding area form T-shaped intersections on Shenjiang Road, Jufeng Road, Keqiao Road, and Shenlun Road. The Shenjiang Road bus station and subway station are located in the Jinding area and coupled with the “Super Ring Corridor”. The corridor connects to the #16, #17, #19, and #20 plots that contain more commercial land than others. Due the location of public transport stations, a large slow-traffic demand is generated, especially in the T-shaped intersections of Shenjiang Road–Zhiqiao Road and Jufeng Road–Shentao Road. The reason is that pedestrians need to cross the roads to go to stations or other plots. If the T-shaped intersections are unsignalized, it seriously affects driving efficiency and causes safety issues. Due to the difficulty of restraining the behavior of pedestrians and non-motorized vehicles, the entrances and exits of the Jinding area are the site of conflicts with motor vehicles, pedestrians, and non-motorized vehicles. To avoid traffic crashes, motor vehicles often need to slow down and give way, resulting in traffic congestion on the main and access roads. To improve the driving efficiency and provide safe and comfortable travel in the Jinding area, the traffic volume should be reduced. Based on the planning of the “Super Ring Corridor”, it is necessary to design traffic-calming measures for the Jinding area in view of flow control.
2.2. Simulation Platform
SUMO (Simulation of Urban Mobility) is an open-source micro traffic simulation platform developed by the German Aerospace Center [22]. SUMO embeds car-following models, lane-change models, and path-allocation algorithms. With these microscopic models, we can conduct precise simulations with individual routes and detailed driving behavior. Meanwhile, SUMO supports real-time information transmission via the Traci interface [23]. Real-time traffic states can be transmitted to Python for analysis, and we can use Python to control the traffic system in real time via the Traci interface. Since path routing and dynamic control should be simulated, SUMO is a suitable simulation platform for traffic simulation in the Jinding area.
In SUMO, the road network and parking lots are built according to survey and planning. Since the Jinding area is still under construction, traffic signal control schemes and traffic volume on the main and minor roads from surveys are directly used, and traffic demand after establishment is predicted in peak hours using the classical four-step traffic demand forecast. With the function of traffic flow generation in SUMO, we definite plots and the beginnings and ends of roads as origins and destinations, and set O-D pairs and traffic volume in the flow definition. In the simulation, the routes are planned using shortest or optimal path routing. In such a way, the background traffic, predicted traffic demand, and signal control schemes are loaded on the road network. In addition, the T-shaped intersections and the intersections in the Jinding area are set without any signal control schemes.
2.3. Adaptive Traffic Volume Control
In the Jinding area, speed limits have been designed as a traffic-calming measure. Based on the measures, the traffic volume is further limited to improve travel quality. The “Super Ring Corridor” in the Jinding area is located at the intersection of Zhiqiao Road and Shentao Road. Since the layout of most T-shaped intersections is similar, we take the Shenjiang–Zhiqiao T-shaped intersection as an example to design a traffic volume control strategy. Under ideal conditions, traffic volume control reduces the number of vehicles entering the Jinding area and accelerates the leaving of the Jinding area. However, dynamic traffic volume control inevitably has a certain impact on the motor vehicles, pedestrians, and non-motorized vehicles on the main roads. Therefore, volume control should consider the efficiency of motor vehicle traffic on the main road and the efficiency of pedestrian and non-motorized vehicles, and limit the number of motor vehicles entering the Jinding area. However, the traffic environment is dynamically changing in practice. It is difficult to determine traffic control rules and schemes. Therefore, we propose an adaptive traffic volume control using deep reinforcement learning (DRL). The number of vehicles entering and leaving the Jinding area is dynamically adjusted by traffic volume control in the T-shaped intersection. This adaptive traffic volume control can be used with signal control, but unlike traditional signal control, this strategy is used to decide the moment to release motor vehicles.
The adaptive traffic volume control is developed based on intelligent signal control using DRL algorithms [24]. The design of phases is shown in Figure 3. We set the minimum duration time of most phases as 3 s, while we set it as 15 s for phase 0 to ensure enough time for passing on the main road. Since the number of vehicles on the road is dynamically changing, it is difficult to determine the specific phase scheme during model design. Thus, we designed as many phase schemes as possible in the action space for phase selection. To ensure the safety of slow traffic, pedestrians and non-motorized vehicles are allowed to pass through the intersection only when the phase is straight through for the vehicles on the main road. In this study, the Deep Q network (DQN) is used to train an adaptive traffic volume control model. In the model, the deep neural network acts as an agent that provides signal phase selection [24]. The state in the DQN model can be expressed as to represent the number of vehicles on each entrance and exit lane (see Figure 3). At each timestep, the action is selected from the set [0, 1, 2, 3, 4, 5]. The action space is shown in Figure 3 in the right with corresponding numbers. The rewards of the DQN model can be expressed as
where is the number of vehicles in lane ; is the lane capacity of lane , which is the maximum number of vehicles that can be accommodated in that lane. By training the DQN model iteratively [25], the agent can learn to select the appropriate phase according to the state to maximize the expected accumulated reward. During the training, the agent balances the driving efficiency on main and access roads. In this way, traffic congestion in the Jinding area can be alleviated as much as possible, and a more comfortable travel environment can be provided. The other details of the DQN algorithm follow the conventional settings [25]. Specifically, the neurons of each layer in the DQN network are set as 4-30-6. The input and output of the DQN network are the state and probability distribution of actions, respectively.
3. Results
To show the performance of the DQN-based traffic volume control model, called the DQN model below, we take an evening peak period as an example, use SUMO 1.6.0 to establish the road network in the Jinding area, and change the phase in SUMO using Traci interface in Python 3.7. In the simulation, we input the traffic flow calculated using four-stage method and set the signal control at crossings based on investigation. During the simulation, the number of vehicles on each road is obtained through the Traci interface of SUMO. The DQN model outputs traffic volume control strategy in real time. Then, the corresponding phase is changed in SUMO to achieve adaptive control.
The training trajectory of the DQN model is shown in Figure 4. We set the total number of timesteps in each episode as 300 to obtain enough transitions and evaluate the performance of the proposed traffic-calming measure (adaptive traffic volume control). Specifically, an episode means a simulation experiment. An episode starts with the initialization of road network and traffic flow. When the termination condition that the total timesteps are 300 satisfies, the episode ends. In each timestep, a reward is received. Since there are 300 rewards in each episode, we use mean episode score, which is the mean value of the rewards in an episode, to represent the goodness of action selection in this episode. Due to the large fluctuations in the original reward data, we use a rolling window of 20 episodes to smooth the data and show the training performance. It can be seen that the DQN model has a convergence tendency after 35 episodes, meaning that the model learns to output effective traffic volume control strategies.
To evaluate the contributions of the adaptive traffic volume control, the trained DQN model was tested on the road network of the Jinding area. The average number of vehicles and the average speed of each road were used as metrics. As shown in Figure 5a,b, the adaptive traffic volume control can effectively reduce traffic volume, increase the driving speed under the speed limit, and alleviate road traffic congestion on Zhiqiao Road. Though adaptive traffic volume control has led to an increase in the number of vehicles in the Shenjiang road entrance, it does not have an obvious impact on vehicles in terms of average driving speed. Therefore, the adaptive traffic volume control can ensure the efficiency of the straight-through vehicles on main roads. In Figure 5c,d, we also evaluate the impact of traffic volume control on roads in the Jinding area. The traffic volume on the road network in the Jinding area is reduced using the adaptive traffic volume control. Under the speed limit, the reduction in the traffic volume improves driving efficiency in the Jinding area. The experimental results show the effectiveness of the proposed adaptive traffic-calming measure on both T-shaped intersections and roads in the road network. The adaptive traffic volume control helps vehicles leave the Jinding area quickly and reduces the number of vehicles enter the Jinding area. As a result, a good traffic environment is created for motor vehicles, pedestrians, and non-motorized vehicles.
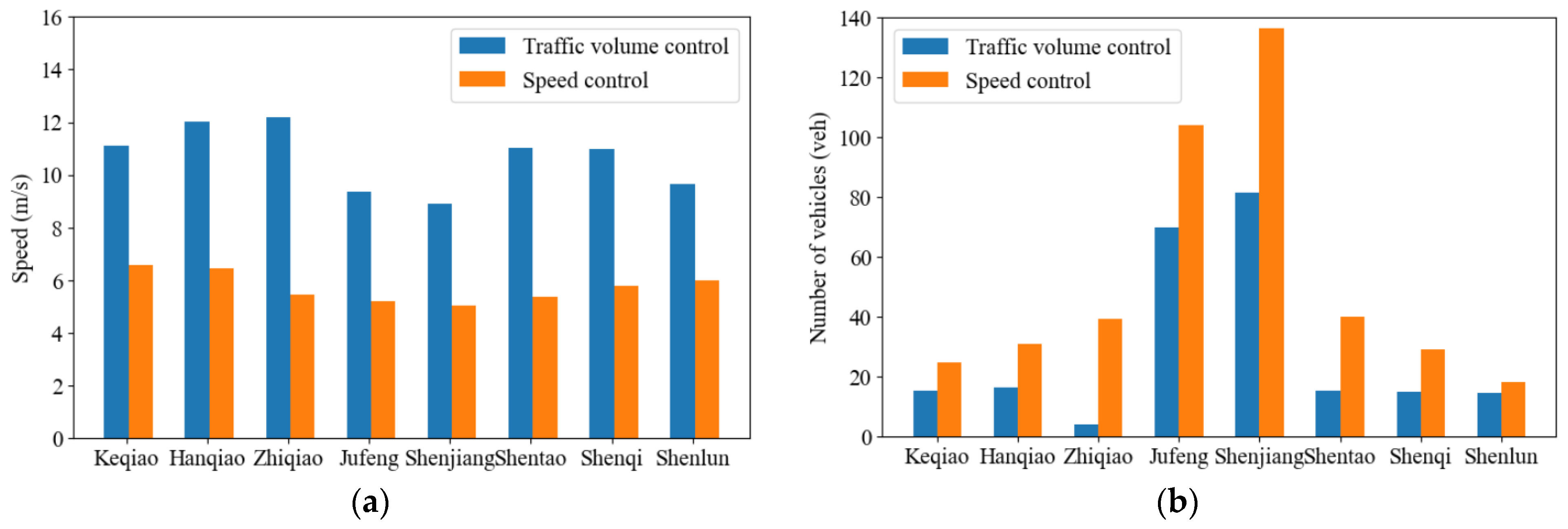
To compare with conventional traffic-calming measures, we take the most frequently used measure, speed control, as an example. The proposed adaptive traffic-calming measure was speed limit. Since the speed limit is set as 13.89 m/s (50 km/h) in the adaptive traffic-calming measure, we set the speed limit as 8.33 m/s (30 km/h) as speed control. Figure 6a shows that the speed control significantly reduces driving speed on roads. As shown in Figure 6b, due to the low driving speeds, travel demand cannot be satisfied, and traffic congestion is generated in the Jinding area.
Compared to conventional static traffic-calming measures, the proposed measure can reduce traffic volume in the Jinding area via a DRL-based traffic volume control. The proposed traffic-calming measure can adapt to a dynamic traffic environment. Meanwhile, the proposed measure can be applied with signal control schemes directly. However, the traffic volume control is based on the assumption of minimum duration time of phases. If the phase changes quickly, it may be a challenge for inexperienced drivers to control their vehicles. A long phase duration time reduces the flexibility of the dynamic environment. Indeed, the minimum duration time is associated with travel demand, traffic volume, and phase design, which has impacts on training stability and traffic safety. Thus, how to determine the minimum duration time should be investigated the in future research. Meanwhile, we present traffic volume control for a single intersection in this preliminary study. In practice, signal control at different intersections can be optimized synergistically for better system performance, which is a multi-agent control problem [26,27].
4. Conclusions
In the new stage of urban traffic development, traffic-calming measures can effectively protect the right of way of pedestrians and non-motorized vehicles. Traffic-calming measures can improve the quality of slow traffic and the overall traffic environment. In this study, we summarize the common measures for urban traffic calming in China. Then, we develop an adaptive traffic volume control approach based on the characteristics of the Jinding area for adaptive traffic calming. Further, the performance of the proposed approach is evaluated to verify its effectiveness. The experimental results show that the proposed approach can reduce traffic volume in the Jinding area in Shanghai, China. Under a speed limit, driving speed increases due to the reduction in traffic volume, which provides a safe, efficient, and comfortable travel experience for motor vehicles, pedestrians, and non-motorized vehicles. In the future, traffic calming needs to adapt to local transportation conditions and serve the development of urban transportation with a people-oriented perspective [13]. In future research, the minimum duration time and cooperative traffic volume control at different intersections can be further investigated.
Author Contributions
Conceptualization, J.W. and J.Y.; methodology, J.W.; software, S.J.; investigation, S.J.; data curation, J.W. and J.Y.; writing—original draft preparation, J.W. and J.Y.; writing—review and editing, J.W., J.Y. and S.J.; visualization, S.J.; supervision, S.J. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Research Program from Science and Technology Commission of Shanghai, China, grant number 21DZ1205100, 22YF1427700, and 22QB1405100; The Innovation Program of Shanghai Municipal Education Commission, China, grant number 2021-01-07-00-07-E00092.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Menendez, M.; Ambühl, L. Implementing Design and Operational Measures for Sustainable Mobility: Lessons from Zurich. Sustainability 2022, 14, 625. [Google Scholar] [CrossRef]
- Hang, Z.; Jun, W. Research on the Development Mode of Slow Traffic System in Cities Based on Low-Carbon Concept. J. Innov. Sustain. RISUS 2011, 2, 33–39. [Google Scholar] [CrossRef] [Green Version]
- Distefano, N.; Leonardi, S. Evaluation of the Effectiveness of Traffic Calming Measures by SPEIR Methodology: Framework and Case Studies. Sustainability 2022, 14, 7325. [Google Scholar] [CrossRef]
- Nadafianshahamabadi, R.; Tayarani, M.; Rowangould, G. A Closer Look at Urban Development under the Emergence of Autonomous Vehicles: Traffic, Land Use and Air Quality Impacts. J. Transp. Geogr. 2021, 94, 103113. [Google Scholar] [CrossRef]
- Balant, M.; Lep, M. Comprehensive Traffic Calming as a Key Element of Sustainable Urban Mobility Plans—Impacts of a Neighbourhood Redesign in Ljutomer. Sustainability 2020, 12, 8143. [Google Scholar] [CrossRef]
- Pérez-Acebo, H.; Ziolkowski, R.; Gonzalo-Orden, H. Evaluation of the Radar Speed Cameras and Panels Indicating the Vehicles’ Speed as Traffic Calming Measures (TCM) in Short Length Urban Areas Located along Rural Roads. Energies 2021, 14, 8146. [Google Scholar] [CrossRef]
- Paszkowski, J.; Herrmann, M.; Richter, M.; Szarata, A. Modelling the Effects of Traffic-Calming Introduction to Volume–Delay Functions and Traffic Assignment. Energies 2021, 14, 3726. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, X.; Zhang, J.; Shang, H. Deriving Environment-Friendly Speed Limit Scheme Using an Integrated Traffic Simulation Framework. J. Air Waste Manag. Assoc. 2021, 71, 633–649. [Google Scholar] [CrossRef]
- Xu, G. Research on Traffic Calming Measures and Its Evaluation in Urban Areas; Southeast University: Nanjing, China, 2016. [Google Scholar]
- Zhou, F. Research on Measures and Evaluation Based on Urban Traffic Tranquilization. Technol. Mark. 2017, 24, 330–331. [Google Scholar]
- Zhao, Q. Research and Practice of Quiet Design of Urban Road Traffic. Urban Road Bridges Flood Control 2016, 7, 34. [Google Scholar]
- Gaca, S.; Kiec, M.; Budzynski, M. Evaluating the Effectiveness of Non-Physical Speed Management Measures. 2017. Available online: https://mostwiedzy.pl/en/publication/evaluating-the-effectiveness-of-non-physical-speed-management-measures,140283-1 (accessed on 11 August 2022).
- Solowczuk, A. Effect of Traffic Calming in a Downtown District of Szczecin, Poland. Energies 2021, 14, 5838. [Google Scholar] [CrossRef]
- Ignaccolo, M.; Zampino, S.; Maternini, G.; Tiboni, M.; Leonardi, S.; Inturri, G.; Le Pira, M.; Cocuzza, E.; Distefano, N.; Giuffrida, N.; et al. How to Redesign Urbanized Arterial Roads? The Case of Italian Small Cities. Transp. Res. Procedia 2022, 60, 196–203. [Google Scholar] [CrossRef]
- De Borger, B.; Proost, S. Road Tolls, Diverted Traffic and Local Traffic Calming Measures: Who Should Be in Charge? Transp. Res. Part B Methodol. 2021, 147, 92–115. [Google Scholar] [CrossRef]
- Zhao, C.; Liao, F.; Li, X.; Du, Y. Macroscopic Modeling and Dynamic Control of On-Street Cruising-for-Parking of Autonomous Vehicles in a Multi-Region Urban Road Network. Transp. Res. Part C Emerg. Technol. 2021, 128, 103176. [Google Scholar] [CrossRef]
- Zhai, Z.; Yang, Y.; Shen, Y.; Ji, Y.; Du, Y. Assessing the Impacts of Autonomous Bus-on-Demand Based on Agent-Based Simulation: A Case Study of Fuyang, Zhejiang, China. J. Adv. Transp. 2020, 2020, 7981791. [Google Scholar] [CrossRef]
- Du, Y.; Qin, B.; Zhao, C.; Zhu, Y.; Cao, J.; Ji, Y. A Novel Spatio-Temporal Synchronization Method of Roadside Asynchronous MMW Radar-Camera for Sensor Fusion. IEEE Trans. Intell. Transp. Syst. 2021, 1–12. [Google Scholar] [CrossRef]
- Du, Y.; Chen, J.; Zhao, C.; Liu, C.; Liao, F.; Chan, C.-Y. Comfortable and Energy-Efficient Speed Control of Autonomous Vehicles on Rough Pavements Using Deep Reinforcement Learning. Transp. Res. Part C Emerg. Technol. 2022, 134, 103489. [Google Scholar] [CrossRef]
- Zhao, C.; Zhu, Y.; Du, Y.; Liao, F.; Chan, C.-Y. A Novel Direct Trajectory Planning Approach Based on Generative Adversarial Networks and Rapidly-Exploring Random Tree. IEEE Trans. Intell. Transp. Syst. 2022, 1–12. [Google Scholar] [CrossRef]
- Zhao, C.; Song, A.; Du, Y.; Yang, B. TrajGAT: A Map-Embedded Graph Attention Network for Real-Time Vehicle Trajectory Imputation of Roadside Perception. Transp. Res. Part C Emerg. Technol. 2022, 142, 103787. [Google Scholar] [CrossRef]
- Krajzewicz, D.; Erdmann, J.; Behrisch, M.; Bieker, L. Recent Development and Applications of SUMO-Simulation of Urban MObility. Int. J. Adv. Syst. Meas. 2012, 5, 128–138. [Google Scholar]
- Lopez, P.A.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flötteröd, Y.-P.; Hilbrich, R.; Lücken, L.; Rummel, J.; Wagner, P.; Wießner, E. Microscopic Traffic Simulation Using SUMO. In Proceedings of the 21st IEEE International Conference on Intelligent Transportation Systems, Maui, HI, USA, 4–7 November 2018. [Google Scholar]
- Li, W.; Cai, Y.; Dinesha, U.; Fu, Y.; Di, X. CVLight: Deep Reinforcement Learning for Adaptive Traffic Signal Control with Connected Vehicles. arXiv 2021, arXiv:2104.10340. [Google Scholar]
- Mnih, V.; Kavukcuoglu, K.; Silver, D.; Graves, A.; Antonoglou, I.; Wierstra, D.; Riedmiller, M. Playing Atari with Deep Reinforcement Learning. arXiv 2013, arXiv:1312.5602. [Google Scholar]
- Zhang, X.; Zhao, C.; Liao, F.; Li, X.; Du, Y. Online Parking Assignment in an Environment of Partially Connected Vehicles: A Multi-Agent Deep Reinforcement Learning Approach. Transp. Res. Part C Emerg. Technol. 2022, 138, 103624. [Google Scholar] [CrossRef]
- Zhao, C.; Li, S.; Wang, W.; Li, X.; Du, Y. Advanced parking space management strategy design: An agent-based simulation opti-mization approach. Transp. Res. Rec. 2018, 2672, 901–910. [Google Scholar] [CrossRef]
Figure 1.
Land use pattern in Jinding area.
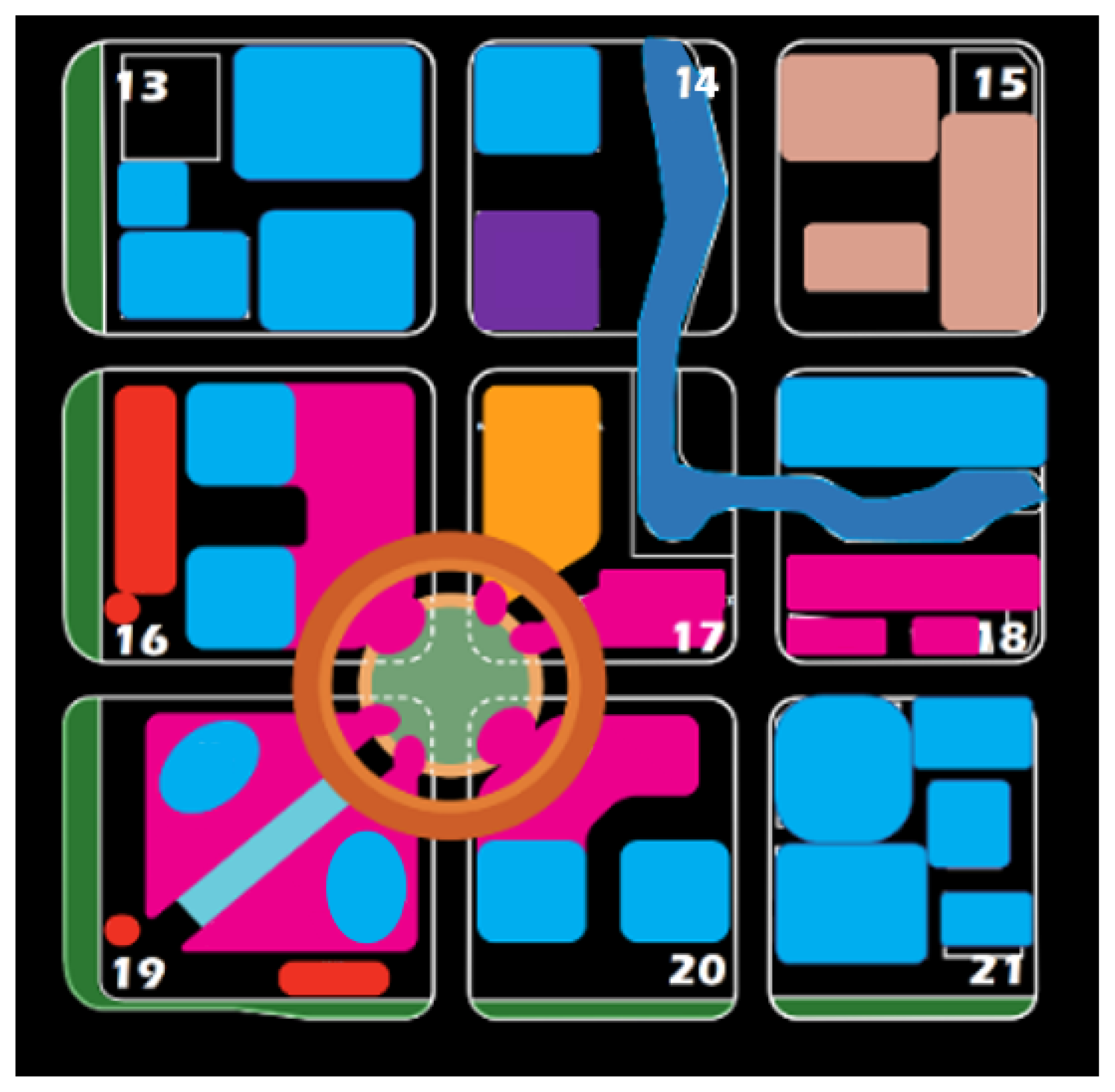
Figure 2.
The situations of road infrastructure in Jinding area: (a) road category; (b) bus and subway station distribution; (c) section shape of Shenjiang Road; (d) section shape of Keqiao Road.
Figure 2.
The situations of road infrastructure in Jinding area: (a) road category; (b) bus and subway station distribution; (c) section shape of Shenjiang Road; (d) section shape of Keqiao Road.
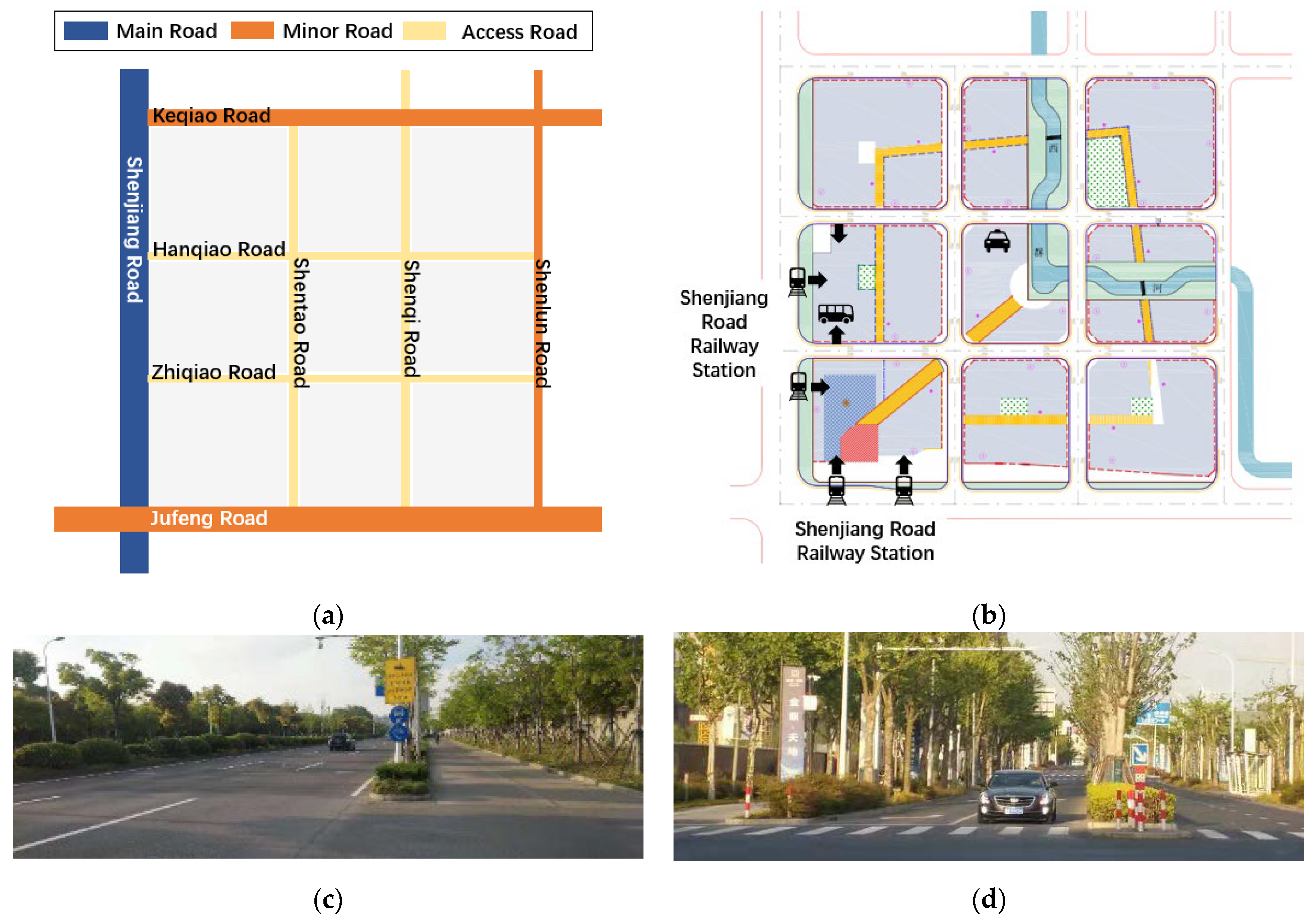
Figure 3.
The setting of lanes and signal phases in the T-shaped intersection.
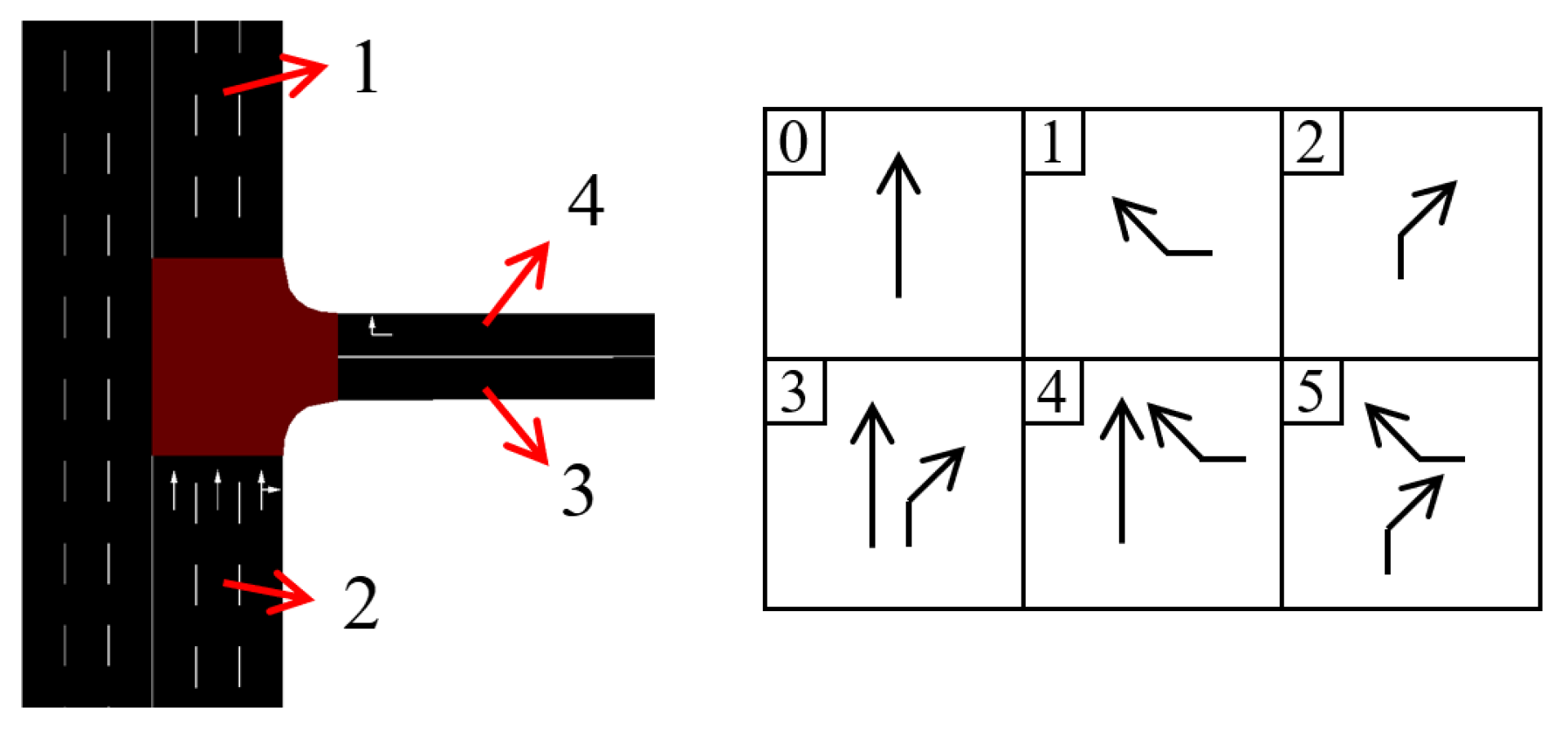
Figure 4.
Training trajectory of the DQN-based traffic volume control model.
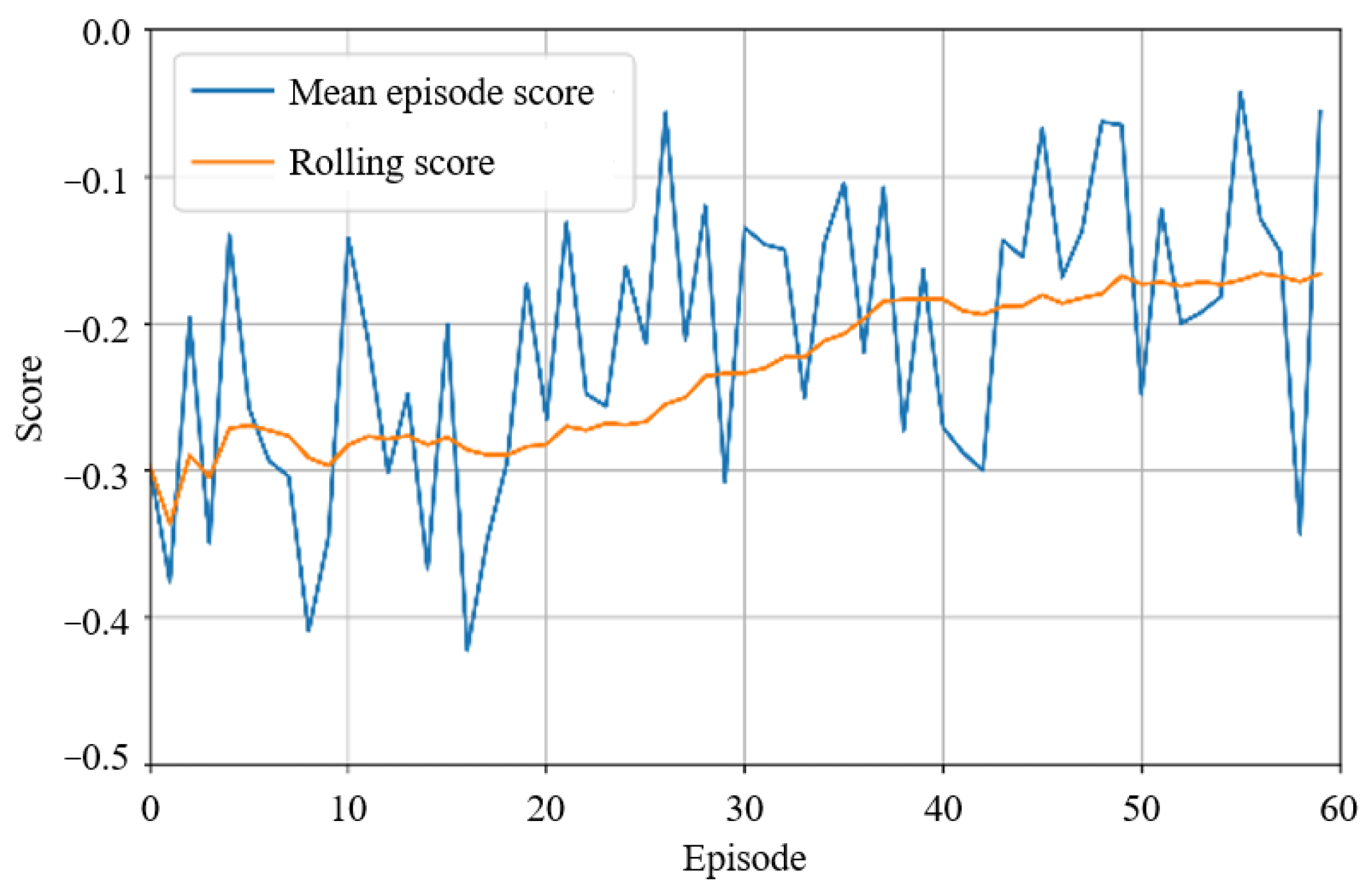
Figure 5.
The evaluation results of traffic volume control and no control: (a,b) are average driving speed and number of vehicles at the intersection, respectively; (c,d) are average driving speed and number of vehicles in the Jinding area, respectively.
Figure 5.
The evaluation results of traffic volume control and no control: (a,b) are average driving speed and number of vehicles at the intersection, respectively; (c,d) are average driving speed and number of vehicles in the Jinding area, respectively.


Figure 6.
The evaluation results of traffic volume control and speed control: (a,b) are average driving speed and number of vehicles in the Jinding area, respectively.
Figure 6.
The evaluation results of traffic volume control and speed control: (a,b) are average driving speed and number of vehicles in the Jinding area, respectively.
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Wang, J.; Ying, J.; Jiang, S. An Adaptive Traffic-Calming Measure and Effectiveness Evaluation in a Large Urban Complex of Shanghai, China. Sustainability 2022, 14, 13023. https://doi.org/10.3390/su142013023
AMA Style
Wang J, Ying J, Jiang S. An Adaptive Traffic-Calming Measure and Effectiveness Evaluation in a Large Urban Complex of Shanghai, China. Sustainability. 2022; 14(20):13023. https://doi.org/10.3390/su142013023
Chicago/Turabian StyleWang, Jindong, Jianguo Ying, and Shengchuan Jiang. 2022. "An Adaptive Traffic-Calming Measure and Effectiveness Evaluation in a Large Urban Complex of Shanghai, China" Sustainability 14, no. 20: 13023. https://doi.org/10.3390/su142013023
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.