
Enhancing Traffic Intelligence in Smart Cities Using Sustainable Deep Radial Function


 , ,
, ,
Abstract
:1. Introduction
- The deep RBF network can learn complex spatial and temporal dependencies in traffic data, allowing for more accurate and granular traffic forecasts. This capability to capture complex relationships improves the accuracy of traffic prediction.
- By utilizing diverse data collected from sensors and smart devices deployed throughout the smart city, the deep RBF model is able to adapt to the distinctive characteristics of various areas. This customization results in more efficient and optimized traffic management strategies for specific smart city locations.
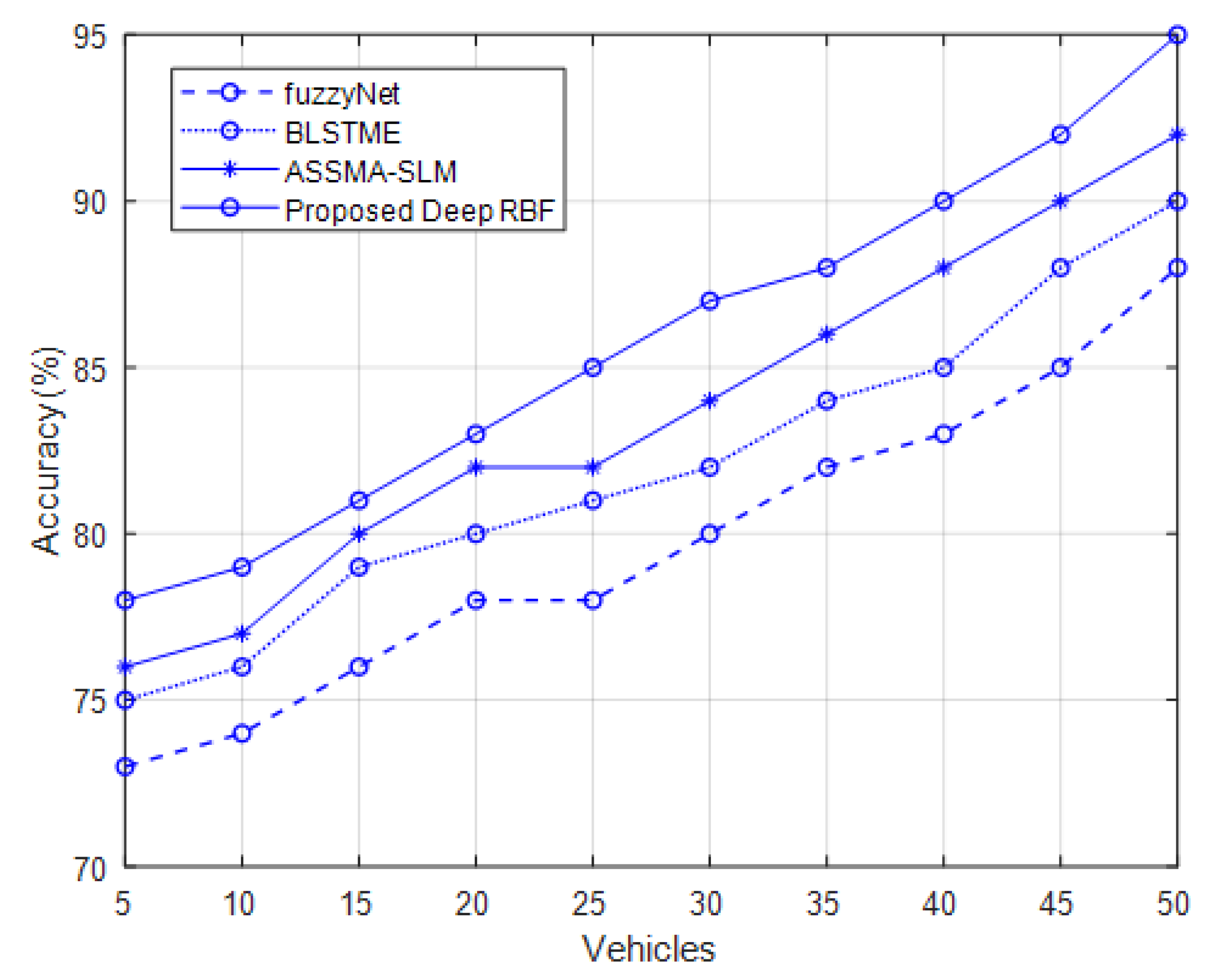
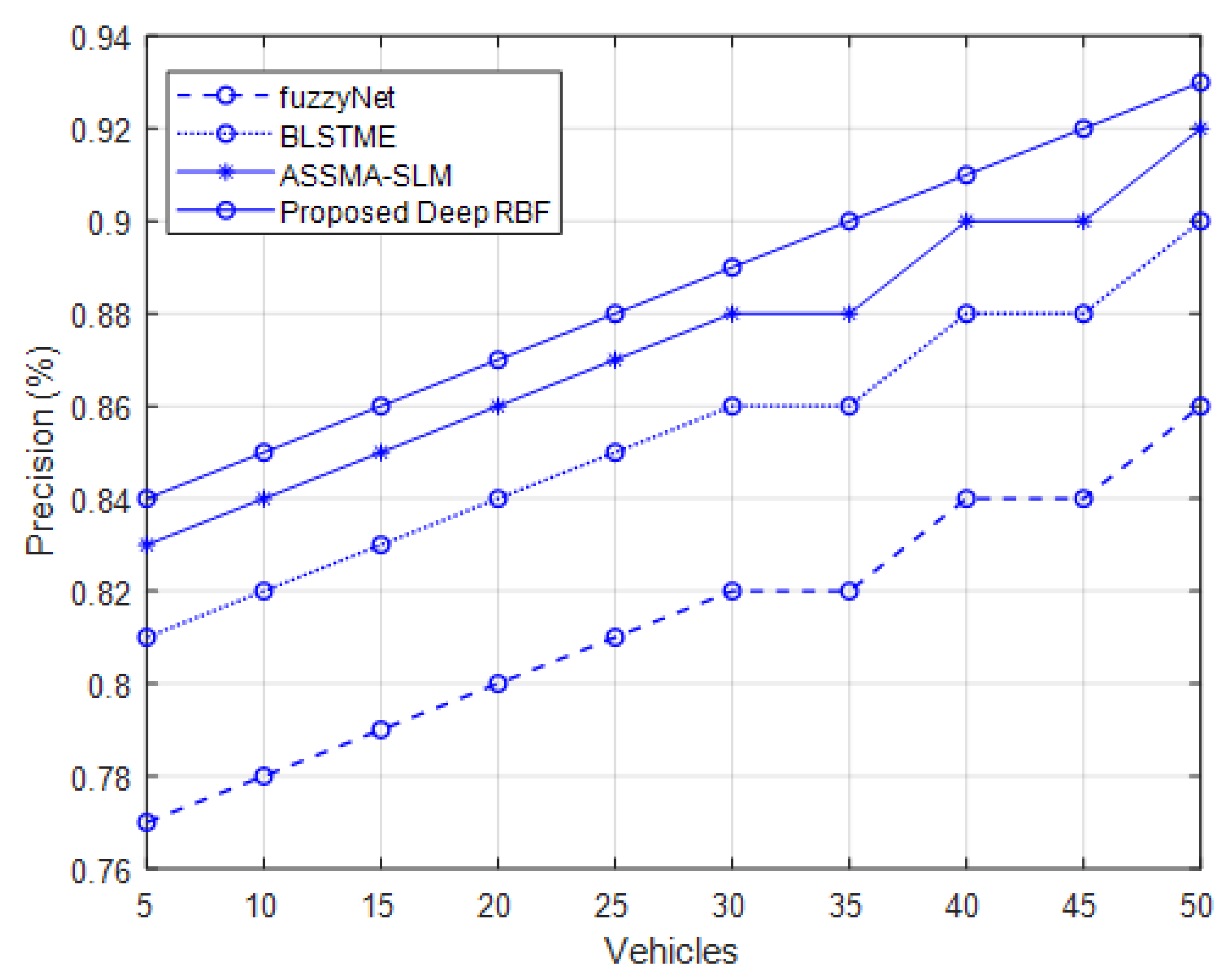
- The research demonstrates, through extensive experiments and comparisons with real-world traffic datasets, that the deep RBF-based approach outperforms conventional traffic analysis techniques. The model’s ability to capture nonlinear relationships and manage large-scale datasets contributes to improved accuracy and efficiency of traffic prediction.
2. Related Works
3. System Model
- Sensors and IoT Devices: Smart cities deploy a network of sensors and Internet of Things (IoT) devices across the urban environment. These devices collect real-time information regarding traffic flow, vehicle counts, weather conditions, air quality, and other pertinent parameters.
- Data Collection and Management: The data collected from sensors and IoT devices are aggregated, processed, and stored in a centralized or distributed database. This information serves as the basis for traffic analysis and forecasting.
- Communication Infrastructure: A communication infrastructure, such as wireless networks, facilitates the transfer of data between sensors, devices, and the central data management system.
- Traffic Management Systems: Smart cities employ advanced traffic management systems that use data analytics and decision-making algorithms to optimize traffic flow, control signals, manage congestion, and provide commuters with real-time information.
- A.
- Transportation Infrastructure
- Road Network: The city road network is comprised of interstates, major roads, and local streets.
- Intersections: Numerous intersections in the city are equipped with traffic lights and sensors.
- Public Transportation: Buses, trams, and metro systems are available as public transportation options in the city.
- B.
- Data Collection systems
- Traffic Sensors: Sensors at key locations are installed, such as road segments and intersections, to collect real-time traffic data.
- Surveillance Cameras: Strategically positioned surveillance cameras monitor traffic conditions and collect visual data for analysis.
- Weather Stations: Throughout the city, weather stations are deployed to collect weather-related data.
- C.
- Intelligent Transportation Systems
- Traffic Management Center: The city has a central Traffic Management Center that collects, processes, and analyzes traffic data.
- Communication Infrastructure: The robust communication network facilitates the exchange of data between various transportation system components.
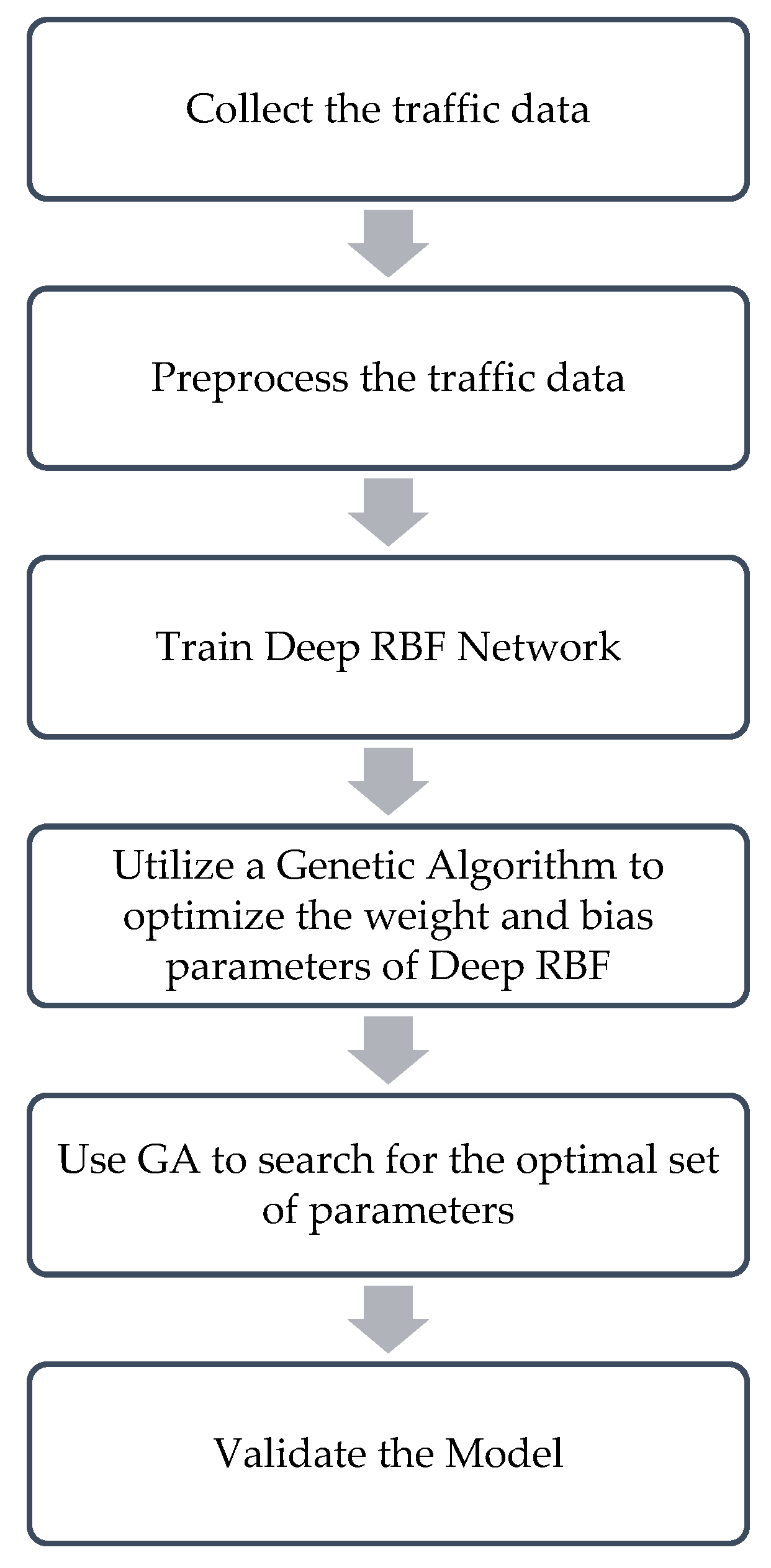
4. Proposed Methodology
4.1. Data Collection
4.2. Preprocessing and Feature Extraction
4.3. Deep RBF Network Architecture Design
| Algorithm 1: Proposed Deep RBF Framework |
| # Step 1: Data Preprocessing preprocess_data(); # Step 2: Initialize Deep RBF Network initialize_network(); # Step 3: Training the Deep RBF Network train_network(); # Step 4: Evaluation evaluate_network(); # Step 5: Prediction and Congestion Detection make_predictions(); # Step 6: Optimize Traffic Management Strategies optimize_strategies(); # Function for Data Preprocessing def preprocess_data(); # Load and preprocess traffic data load_data(); normalize_data(); split_data(); # Function to Initialize Deep RBF Network def initialize_network(); # Set the architecture and parameters of the network set_network_architecture(); set_network_parameters(); # Function for Training the Deep RBF Network def train_network(); # Perform forward propagation and backpropagation for epoch in range(num_epochs): forward_propagation(); compute_loss(); backpropagation(); update_parameters(); # Function for Evaluation def evaluate_network(); # Compute evaluation metrics (e.g., accuracy, loss) compute_metrics(); # Function for Prediction and Congestion Detection def make_predictions(); # Input: Traffic data for prediction input_data = preprocess_input_data(); # Forward propagation to make predictions forward_propagation(input_data); # Output: Predicted traffic conditions, congestion status, etc. output_predictions = get_output_predictions(); # Function to Optimize Traffic Management Strategies def optimize_strategies(): # Input: Current traffic data, predicted traffic conditions current_data = get_current_traffic_data(); predicted_data = get_predicted_traffic_data(); # Analyze and optimize traffic management strategies based on the data optimize_traffic_strategies(current_data, predicted_data); |
4.4. Prediction
- RBF Unit Activation: Using the RBF as described previously, the activation of an RBF unit is calculated for each hidden layer.
- Weighted Sum: The activations from the hidden layers are then multiplied by their respective weights and added to determine the total input to the output layer.
- Activation Function: Passing the total input of the output layer through an activation function, such as a sigmoid function for binary classification tasks or a linear activation for regression tasks, yields the network output.
4.5. Non-Linear Relationship
- Complex Spatial Dependencies: Within a smart city, the network can learn complex spatial dependencies between different areas. For instance, it may reveal that traffic congestion in a particular neighborhood may affect traffic patterns in neighboring regions.
- Temporal Dependencies: In addition to learning temporal dependencies, the network can comprehend how traffic conditions evolve over time. It can detect patterns such as increased traffic during rush hour and alterations in traffic flow caused by special events.
- Nonlinear Feature Interactions: Deep RBF Networks are capable of discovering and simulating complex interactions between multiple input features. For example, it can learn how weather conditions (such as rain and snow) may interact with traffic flow and impact congestion.
- Improved Accuracy: Enhancing traffic intelligence in smart cities using sustainable deep radial functions can improve the accuracy of traffic predictions by reducing the impact of noise caused by congestion or road works. This will help to more accurately plan efficient routes to reduce travel delays, improving quality of life in urban areas.
- Smart Traffic Regulations: By enhancing traffic intelligence in smart cities, municipalities can better optimize their traffic regulations, ensuring that their regulations are tailored to combat particular traffic problems, such as congested streets or roadwork delays.
- Safer Roads: Enhancing traffic intelligence can result in improved safety on roads, as more accurate traffic predications enable drivers to prepare for changes in road conditions and adjust their driving according to the traffic flow. This allows drivers to anticipate and avoid potential hazard situations, such as crashes caused by sudden braking.
- Reduced Emissions: Optimizing traffic regulations with improved traffic intelligence can reduce emissions due to congestion, as drivers no longer have to wait long hours in traffic resulting in increased fuel consumption. This contributes towards more sustainable cities while improving air quality.
- Increased Efficiency: Enhancing traffic intelligence in smart cities allows for more efficient utilization of resources, such as traffic police, vehicle control cameras, and smart signal controllers, by allowing them to target problem areas more accurately. This optimizes their use, resulting in enhanced efficiency in controlling traffic.
5. Deep RBF Network Architecture
5.1. Modeling the Deep RBF Network
| Algorithm 2: Deep RBF Network Architecture |
| # Input: #-X: Input data matrix with shape (num_samples, num_features) # Hyperparameters: #-num_hidden_layers: Number of hidden layers #-num_rbf_units: Number of RBF units per hidden layer #-sigma: Spread parameter for RBF units # Initialize weights and biases for each layer weights = (); biases = (); # Initialize RBF centers randomly rbf_centers = (); # Initialize output layer weights and biases output_weights = (); output_biases = (); # Initialize activations for each layer activations = (); # Define the RBF function def rbf_activation(x, c, sigma): return exp(-sum((x − c) * 2)/(2 * sigma * 2)) # Initialize the input layer activations with the input data activations [0] = X # Loop over each hidden layer for i in range(num_hidden_layers): # Initialize the RBF unit activations for the current layer activations[i + 1] = (); # Loop over each RBF unit in the current layer for j in range(num_rbf_units): # Calculate the RBF unit activation rbf_activation_i_j = rbf_activation(activations[i], rbf_centers[i][j], sigma) # Append the RBF unit activation to the list activations[i + 1].append(rbf_activation_i_j) # Convert the RBF unit activations to a numpy array activations[i + 1] = np.array(activations[i + 1]) # Apply weights and biases to the RBF unit activations activations[i + 1] = np.dot(weights[i], activations[i + 1]) + biases[i] # Apply weights and biases to the final hidden layer activations output_activations = np.dot(output_weights, activations[−1]) + output_biases # Apply an appropriate activation function to the output layer output = activation_function(output_activations) # Perform backpropagation and update weights and biases to minimize the loss # Return the output of the network |
5.2. Weight Bias Parameters
| Algorithm 3: Weight and Bias Optimization using Genetic Algorithm |
| # Genetic Algorithm Parameters: population_size = 100 mutation_rate = 0.1 num_generations = 100 # Create an initial population of weight and bias configurations population = create_initial_population(population_size) # Evaluate the fitness of each candidate solution in the population fitness_scores = evaluate_fitness(population) # Perform evolution over multiple generations for generation in range(num_generations): # Select the parents for reproduction based on their fitness scores parents = select_parents(population, fitness_scores) # Create offspring through crossover and mutation offspring = create_offspring(parents, population_size, mutation_rate) # Evaluate the fitness of the offspring offspring_fitness_scores = evaluate_fitness(offspring) # Replace the population with the offspring population = offspring fitness_scores = offspring_fitness_scores # Select the best individual as the final solution best_individual = select_best_individual(population, fitness_scores) # Extract the weight and bias parameters from the best individual # Use the optimized weight and bias parameters for prediction or further analysis |
6. Optimization of W and b Using Genetic Algorithm
6.1. Encoding of Candidate Solutions
6.2. Fitness Function
- Select parents based on their fitness scores.
- Apply crossover to create offspring from the selected parents.
- Apply mutation to introduce random changes to the offspring chromosomes.
- Evaluate the fitness of the offspring.
- Replace the old generation with the new generation of offspring.
- Repeat the process for a predetermined number of generations or until convergence criteria are met.
6.3. Training the Deep RBF Network
6.4. Back Propagation
| Algorithm 4: Algorithm for Training the Deep RBF Network |
| # Set the learning rate and number of epochs learning_rate = 0.01; num_epochs = 100; # Initialize the weight and bias parameters randomly initialize_parameters(); # Training loop for epoch in range(num_epochs); # Forward propagation forward_propagation(); # Compute the loss compute_loss(); # Backpropagation backpropagation(); # Update parameters update_parameters(learning_rate); # Function for forward propagation def forward_propagation(); # Compute activations of RBF units in each hidden layer compute_rbf_activations(); # Compute the total input to the output layer compute_output_input(); # Apply the activation function to get the output apply_activation_function(); # Function for backward propagation def backpropagation(); # Compute gradients of the loss with respect to the output layer compute_output_gradients(); # Compute gradients of the loss with respect to the hidden layers compute_hidden_gradients(); # Update the weight and bias parameters using the gradients update_parameters(); # Function to update the weight and bias parameters def update_parameters(); # Update the weight and bias parameters using the gradients and learning rate W_output -= learning_rate * dL_dW_output; b_output -= learning_rate * dL_db_output; W_hidden -= learning_rate * dL_dW_hidden; b_hidden -= learning_rate * dL_db_hidden; # Function to compute the loss def compute_loss(); # Compute the loss function based on the predicted outputs and true labels loss = loss_function(predicted_output, true_labels); # Function to compute gradients of the loss with respect to the output layer def compute_output_gradients(); # Compute gradients of the loss with respect to the output layer weights and biases dL_dW_output = gradient_loss_output(); dL_db_output = gradient_loss_output(); # Function to compute gradients of the loss with respect to the hidden layers def compute_hidden_gradients(); # Compute gradients of the loss with respect to the hidden layer weights and biases dL_dW_hidden = gradient_loss_hidden(); dL_db_hidden = gradient_loss_hidden(); |
7. Results and Discussion
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, Y.; Geng, P.; Sivaparthipan, C.B.; Muthu, B.A. Big data and artificial intelligence based early risk warning system of fire hazard for smart cities. Sustain. Energy Technol. Assess. 2021, 45, 100986. [Google Scholar] [CrossRef]
- Li, D.; Deng, L.; Cai, Z. Intelligent vehicle network system and smart city management based on genetic algorithms and image perception. Mech. Syst. Signal Process. 2020, 141, 106623. [Google Scholar] [CrossRef]
- Heidari, A.; Navimipour, N.J.; Unal, M. Applications of ML/DL in the management of smart cities and societies based on new trends in information technologies: A systematic literature review. Sustain. Cities Soc. 2022, 85, 104089. [Google Scholar] [CrossRef]
- Lee, W.H.; Chiu, C.Y. Design and implementation of a smart traffic signal control system for smart city applications. Sensors 2020, 20, 508. [Google Scholar] [CrossRef] [PubMed]
- Mall, P.K.; Narayan, V.; Pramanik, S.; Srivastava, S.; Faiz, M.; Sriramulu, S.; Kumar, M.N. FuzzyNet-Based Modelling Smart Traffic System in Smart Cities Using Deep Learning Models. In Handbook of Research on Data-Driven Mathematical Modeling in Smart Cities; IGI Global: Pennsylvania, PA, USA, 2023; pp. 76–95. [Google Scholar]
- Ho GT, S.; Tsang, Y.P.; Wu, C.H.; Wong, W.H.; Choy, K.L. A computer vision-based roadside occupation surveillance system for intelligent transport in smart cities. Sensors 2019, 19, 1796. [Google Scholar] [PubMed]
- Saleem, M.; Abbas, S.; Ghazal, T.M.; Khan, M.A.; Sahawneh, N.; Ahmad, M. Smart cities: Fusion-based intelligent traffic congestion control system for vehicular networks using machine learning techniques. Egypt. Inform. J. 2022, 23, 417–426. [Google Scholar] [CrossRef]
- Vijayalakshmi, B.; Ramar, K.; Jhanjhi, N.Z.; Verma, S.; Kaliappan, M.; Vijayalakshmi, K.; Ghosh, U. An attention-based deep learning model for traffic flow prediction using spatiotemporal features towards sustainable smart city. Int. J. Commun. Syst. 2021, 34, e4609. [Google Scholar] [CrossRef]
- Yuvaraj, N.; Praghash, K.; Raja, R.A.; Karthikeyan, T. An investigation of garbage disposal electric vehicles (GDEVs) integrated with deep neural networking (DNN) and intelligent transportation system (ITS) in smart city management system (SCMS). Wirel. Pers. Commun. 2022, 123, 1733–1752. [Google Scholar] [CrossRef]
- Zhu, J.Z.; Cao, J.X.; Zhu, Y. Traffic volume forecasting based on radial basis function neural network with the consideration of traffic flows at the adjacent intersections. Transp. Res. Part C Emerg. Technol. 2014, 47, 139–154. [Google Scholar] [CrossRef]
- Carreras, J.; Kikuti, Y.Y.; Miyaoka, M.; Hiraiwa, S.; Tomita, S.; Ikoma, H.; Hamoudi, R. A combination of multilayer perceptron, radial basis function artificial neural networks and machine learning image segmentation for the dimension reduction and the prognosis assessment of diffuse large B-cell lymphoma. AI 2021, 2, 106–134. [Google Scholar] [CrossRef]
- Boidi, G.; Da Silva, M.R.; Profito, F.J.; Machado, I.F. Using machine learning radial basis function (RBF) method for predicting lubricated friction on textured and porous surfaces. Surf. Topogr. Metrol. Prop. 2020, 8, 044002. [Google Scholar] [CrossRef]
- Satapathy, S.K.; Mishra, S.; Mallick, P.K.; Chae, G.S. ADASYN and ABC-optimized RBF convergence network for classification of electroencephalograph signal. Pers. Ubiquitous Comput. 2021, 27, 1161–1177. [Google Scholar] [CrossRef]
- Razaque, A.; Ben Haj Frej, M.; Almi’ani, M.; Alotaibi, M.; Alotaibi, B. Improved support vector machine enabled radial basis function and linear variants for remote sensing image classification. Sensors 2021, 21, 4431. [Google Scholar] [CrossRef]
- Lim, E.A.; Tan, W.H.; Junoh, A.K. An improved radial basis function networks based on quantum evolutionary algorithm for training nonlinear datasets. IAES Int. J. Artif. Intell. 2019, 8, 120. [Google Scholar]
- Kothai, G.; Poovammal, E.; Dhiman, G.; Ramana, K.; Sharma, A.; AlZain, M.A.; Masud, M. A new hybrid deep learning algorithm for prediction of wide traffic congestion in smart cities. Wirel. Commun. Mob. Comput. 2021, 2021, 5583874. [Google Scholar] [CrossRef]
- Reddy, D.K.; Behera, H.S.; Nayak, J.; Vijayakumar, P.; Naik, B.; Singh, P.K. Deep neural network based anomaly detection in Internet of Things network traffic tracking for the applications of future smart cities. Trans. Emerg. Telecommun. Technol. 2021, 32, e4121. [Google Scholar] [CrossRef]
- Saleem, M.; Khadim, A.; Fatima, M.; Khan, M.A.; Nair, H.K.; Asif, M. ASSMA-SLM: Autonomous System for Smart Motor-Vehicles integrating Artificial and Soft Learning Mechanisms. In Proceedings of the 2022 International Conference on Cyber Resilience (ICCR), Dubai, United Arab Emirates, 6–7 October 2022; pp. 1–6. [Google Scholar]
- Ei Leen, M.W.; Jafry NH, A.; Salleh, N.M.; Hwang, H.; Jalil, N.A. Mitigating Traffic Congestion in Smart and Sustainable Cities Using Machine Learning: A Review. In International Conference on Computational Science and Its Applications; Springer Nature: Cham, Switzerland, 2023; pp. 321–331. [Google Scholar]
- Ata, A.; Khan, M.A.; Abbas, S.; Ahmad, G.; Fatima, A. Modelling smart road traffic congestion control system using machine learning techniques. Neural Netw. World 2019, 29, 99–110. [Google Scholar] [CrossRef]
- Radu, L.D. Disruptive technologies in smart cities: A survey on current trends and challenges. Smart Cities 2020, 3, 1022–1038. [Google Scholar] [CrossRef]
- Carter, E.; Adam, P.; Tsakis, D.; Shaw, S.; Watson, R.; Ryan, P. Enhancing pedestrian mobility in smart cities using big data. J. Manag. Anal. 2020, 7, 173–188. [Google Scholar] [CrossRef]
- Ubaid, M.T.; Saba, T.; Draz, H.U.; Rehman, A.; Kolivand, H. Intelligent traffic signal automation based on computer vision techniques using deep learning. IT Prof. 2022, 24, 27–33. [Google Scholar] [CrossRef]
- Band, S.S.; Ardabili, S.; Sookhak, M.; Chronopoulos, A.T.; Elnaffar, S.; Moslehpour, M.; Csaba, M.; Torok, B.; Pai, H.-T.; Mosavi, A. When smart cities get smarter via machine learning: An in-depth literature review. IEEE Access 2022, 10, 60985–61015. [Google Scholar] [CrossRef]
- Tekouabou SC, K.; Cherif, W.; Silkan, H. Improving parking availability prediction in smart cities with IoT and ensemble-based model. J. King Saud Univ.-Comput. Inf. Sci. 2022, 34, 687–697. [Google Scholar]
- Singh, R.; Sharma, R.; Akram, S.V.; Gehlot, A.; Buddhi, D.; Malik, P.K.; Arya, R. Highway 4.0: Digitalization of highways for vulnerable road safety development with intelligent IoT sensors and machine learning. Saf. Sci. 2021, 143, 105407. [Google Scholar] [CrossRef]
- Alrashdi, I.; Alqazzaz, A.; Aloufi, E.; Alharthi, R.; Zohdy, M.; Ming, H. Ad-iot: Anomaly detection of iot cyberattacks in smart city using machine learning. In Proceedings of the 2019 IEEE 9th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 7–9 January 2019; pp. 305–310. [Google Scholar]
- Anthopoulos, L.; Janssen, M.; Weerakkody, V. A Unified Smart City Model (USCM) for smart city conceptualization and benchmarking. In Smart Cities and Smart Spaces: Concepts, Methodologies, Tools, and Applications; IGI Global: Pennsylvania, PA, USA, 2019; pp. 247–264. [Google Scholar]
- Villegas-Ch, W.; Palacios-Pacheco, X.; Luján-Mora, S. Application of a smart city model to a traditional university campus with a big data architecture: A sustainable smart campus. Sustainability 2019, 11, 2857. [Google Scholar] [CrossRef]
- Khan, H.H.; Malik, M.N.; Zafar, R.; Goni, F.A.; Chofreh, A.G.; Klemeš, J.J.; Alotaibi, Y. Challenges for sustainable smart city development: A conceptual framework. Sustain. Dev. 2020, 28, 1507–1518. [Google Scholar] [CrossRef]
- Ortega, S.; Santana, J.M.; Wendel, J.; Trujillo, A.; Murshed, S.M. Generating 3D city models from open LiDAR point clouds: Advancing towards smart city applications. In Open Source Geospatial Science for Urban Studies: The Value of Open Geospatial Data; Springer: Cham, Switzerland, 2021; pp. 97–116. [Google Scholar]
- Cruz, S.; Aguiar, A. Cooperative Localization in Vehicular Networks Dataset. 2020. Available online: https://ieee-dataport.org/open-access/cooperative-localization-vehicular-networks-dataset (accessed on 18 August 2023).
- Bisoi, R.; Parhi, P.; Dash, P.K. Hybrid modified weighted water cycle algorithm and Deep Analytic Network for forecasting and trend detection of forex market indices. Int. J. Knowl. Based Intell. Eng. Syst. 2022, 26, 249–269. [Google Scholar] [CrossRef]
- Marak, Z.R.; Ambarkhane, D.; Kulkarni, A.J. Application of artificial neural network model in predicting profitability of Indian banks. Int. J. Knowl. Based Intell. Eng. Syst. 2022, 26, 159–173. [Google Scholar] [CrossRef]
- Singh, P.; Singh, S.; Paprzycki, M. Detection and elimination of multicollinearity in regression analysis. Int. J. Knowl. Based Intell. Eng. Syst. 2023, 27, 105–111. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Description | Real Life Data Values |
|---|---|---|
| Transportation Infrastructure | Well-developed road network | - Highways, major roads, local streets |
| Intersections equipped with traffic lights and sensors | - Number of intersections: 100 | |
| Various modes of public transportation (buses, trams, metro) | ||
| Data Collection Systems | Traffic sensors for real-time data collection | - Number of sensors: 500 |
| Surveillance cameras for visual monitoring | - Number of cameras: 200 | |
| Weather stations for capturing weather-related data | - Number of weather stations: 10 | |
| Intelligent Transportation Systems (ITS) | Centralized Traffic Management Center | - Data processing and analysis |
| Communication infrastructure for data exchange | ||
| Sample Data Values | Traffic Flow Data: | - Vehicles per hour: 1200 |
| Vehicle Count Data: | - Cars per hour: 500 | |
| Weather Data: | - Temperature: 25 °C | |
| - Humidity: 60% | ||
| - Precipitation: None | ||
| - Wind Speed: 15 km/h | ||
| Road Network Data: | - Road Segment Length: 2 km | |
| - Speed Limit on a major road: 60 km/h | ||
| - Number of lanes on a highway: 4 | ||
| Event Data: | - Road closure due to an accident: 2 h | |
| - Scheduled event near a venue: Increased traffic 6–9 pm |
| Dataset | Description | Parametric Values |
|---|---|---|
| Traffic Flow | Real-time traffic flow data | Time interval: 5 min |
| Historical data: 1 year | ||
| Vehicle Count | Number of vehicles passing through road segments | Time interval: 1 h |
| Vehicle type breakdown: Yes | ||
| Weather Data | Temperature, humidity, precipitation, wind speed | Time interval: 1 h |
| Historical data: 3 years | ||
| Road Network | Topology and attributes of road network | Road segments, intersections |
| Road width, speed limits | ||
| Event Data | Incidents, road closures, scheduled events | Type: Accidents, road closures |
| Schedule: Upcoming events |
| Vehicle | FuzzyNet | BLSTME | ASSMA-SLM | Proposed Deep RBF |
|---|---|---|---|---|
| 5 | 4.68 | 4.61 | 4.55 | 4.52 |
| 10 | 4.45 | 4.33 | 4.26 | 4.12 |
| 15 | 4.15 | 3.98 | 3.92 | 3.89 |
| 20 | 3.96 | 3.88 | 3.81 | 3.76 |
| 25 | 3.95 | 3.82 | 3.68 | 3.45 |
| 30 | 3.41 | 3.37 | 3.33 | 3.24 |
| 35 | 3.25 | 3.22 | 3.18 | 3.12 |
| 40 | 3.21 | 3.14 | 3.08 | 2.98 |
| 45 | 2.92 | 2.91 | 2.89 | 2.85 |
| 50 | 2.82 | 2.78 | 2.76 | 2.67 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ismaeel, A.G.; Mary, J.; Chelliah, A.; Logeshwaran, J.; Mahmood, S.N.; Alani, S.; Shather, A.H. Enhancing Traffic Intelligence in Smart Cities Using Sustainable Deep Radial Function. Sustainability 2023, 15, 14441. https://doi.org/10.3390/su151914441
Ismaeel AG, Mary J, Chelliah A, Logeshwaran J, Mahmood SN, Alani S, Shather AH. Enhancing Traffic Intelligence in Smart Cities Using Sustainable Deep Radial Function. Sustainability. 2023; 15(19):14441. https://doi.org/10.3390/su151914441
Chicago/Turabian StyleIsmaeel, Ayad Ghany, Jereesha Mary, Anitha Chelliah, Jaganathan Logeshwaran, Sarmad Nozad Mahmood, Sameer Alani, and Akram H. Shather. 2023. "Enhancing Traffic Intelligence in Smart Cities Using Sustainable Deep Radial Function" Sustainability 15, no. 19: 14441. https://doi.org/10.3390/su151914441