
A Novel Control Method for Active Power Sharing in Renewable-Energy-Based Micro Distribution Networks

 , ,
, ,  and
and 
Abstract
:1. Introduction
- A novel distributed multi-agent moving average estimation technique is proposed that pre-estimates measured values at every node.
- A hierarchical distributed control structure has been adopted, which incorporates the multi-agent moving average method proposed in this paper, to achieve active power sharing and regulation of the system-wide voltage and frequency values.
- The viability and effectiveness of the investigated approach is tested for scenarios where the network layer is suffering from communication link latencies.
2. Materials and Methods: Problem Formulation
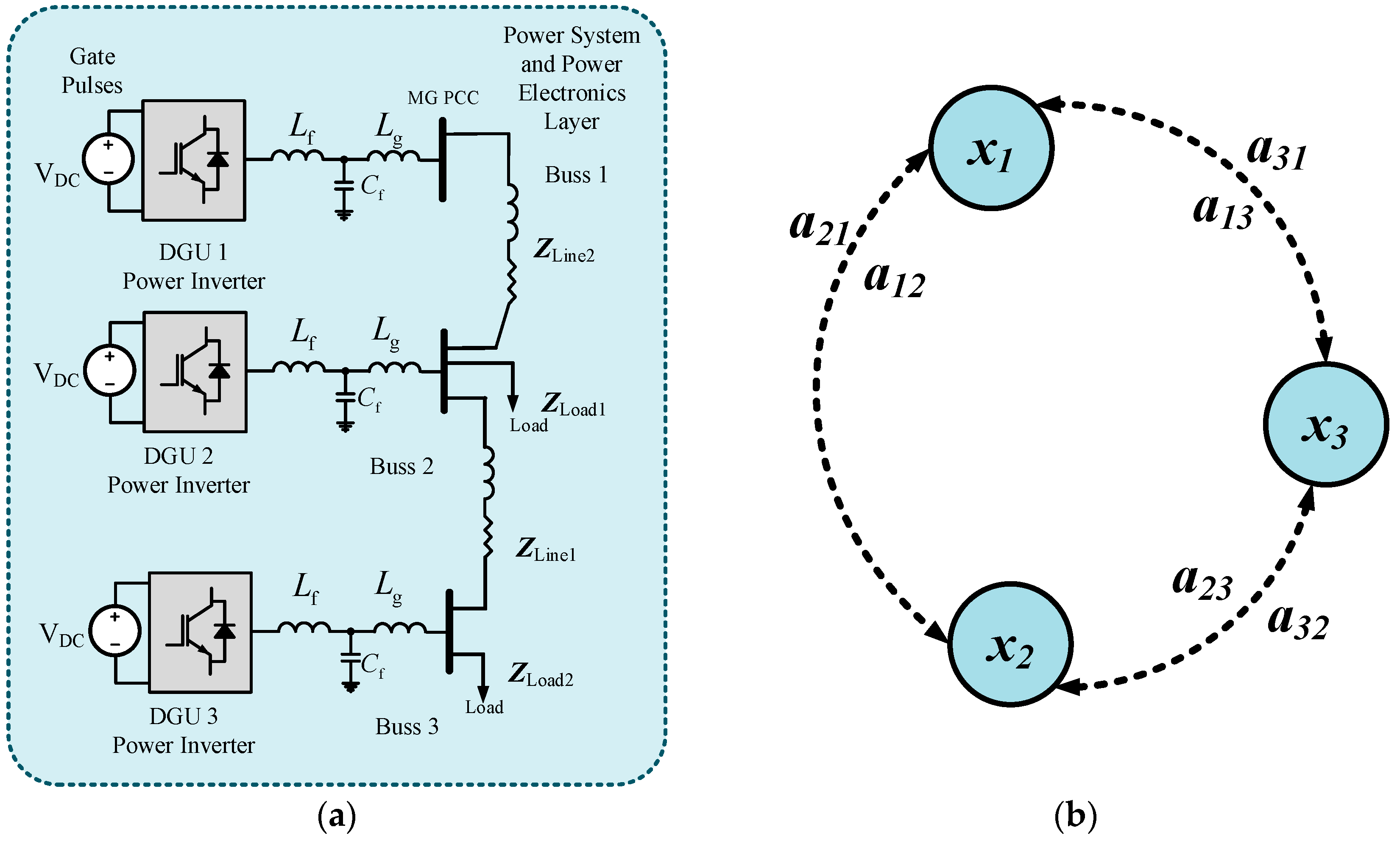
2.1. Microgrid Network Discription
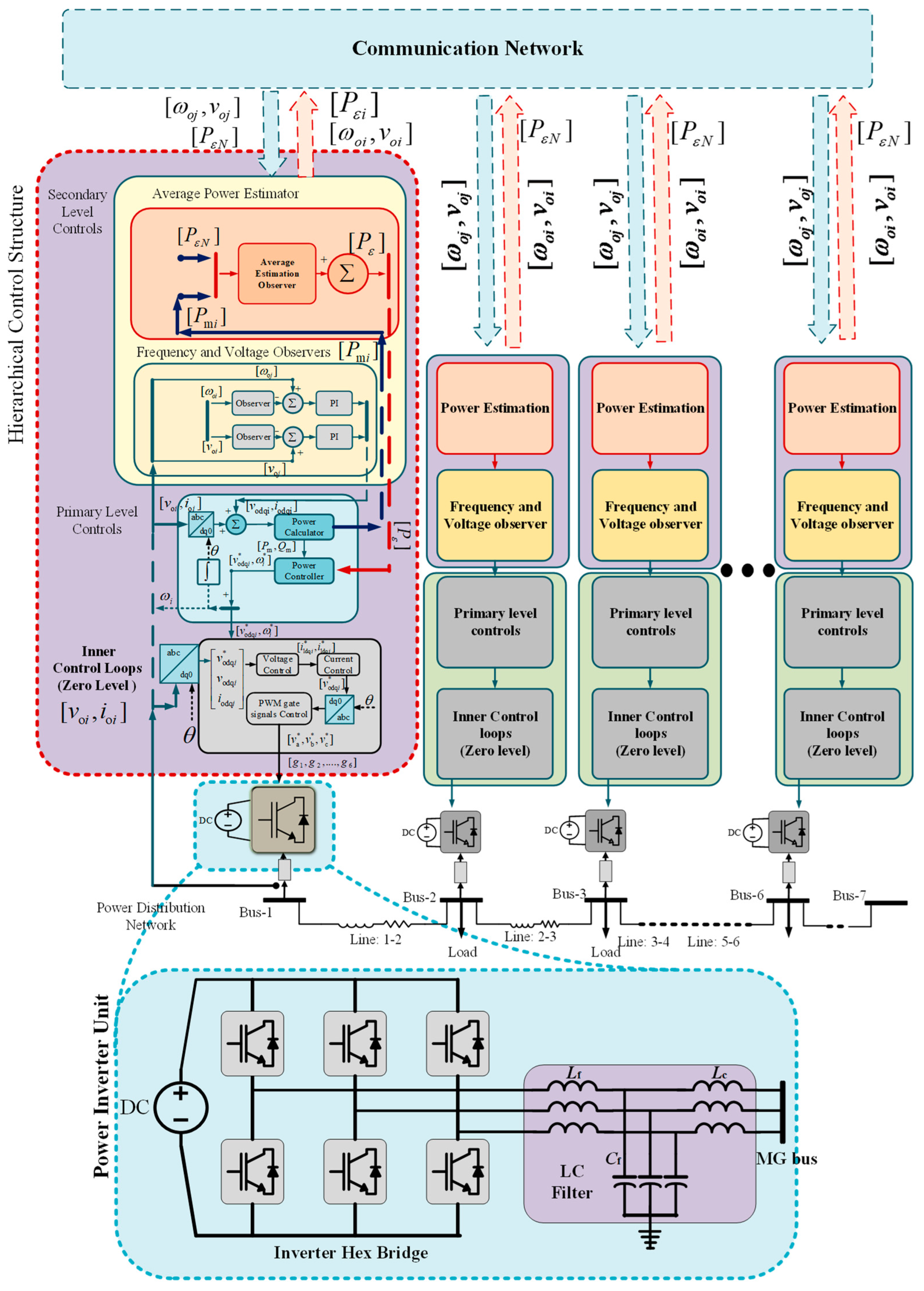
2.2. Hierarchical Controls and Cyber Network
2.2.1. Graph Theoretic Formulation
2.2.2. Cyber-Network Link Latencies
3. Distributed Multi-Agent Moving-Average-Based Control
3.1. Overview of the Power Estimation Method
3.2. Distributed Method for the Estimation of Power Injected
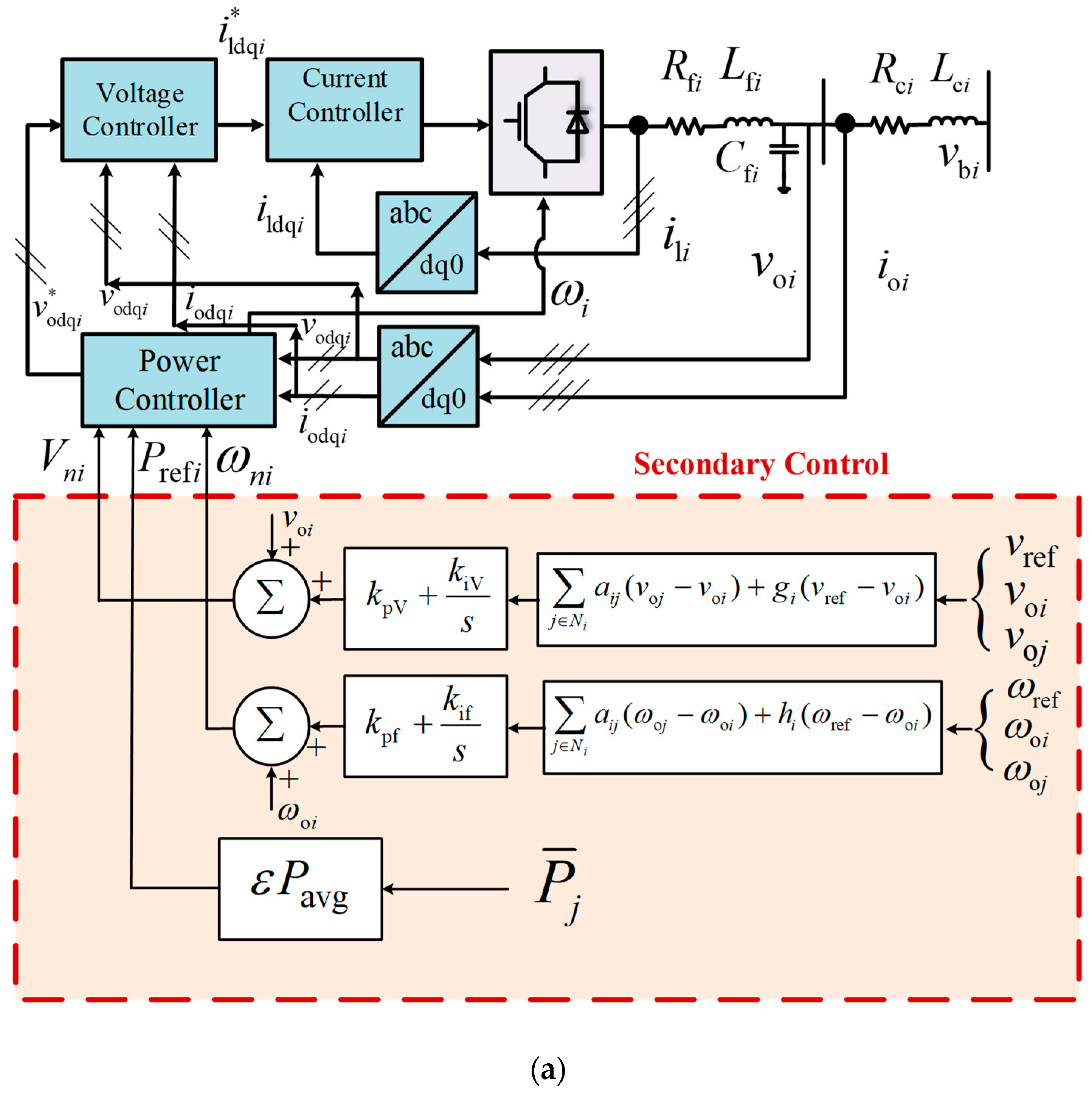
4. Distributed Consensus-Based Controls
5. Voltage and Frequency Restoration
6. Microgrid Modelling under Secondary Control Time-Delays
6.1. Primary Power Sharing Control
6.2. Composite Complete Microgrid Model
7. MG System Stability
8. Case Studies
8.1. Active Power Sharing
8.2. Frequency Regulation
8.3. Voltage Regulation
8.4. Time-Varying Delays in Microgrid Communication Network
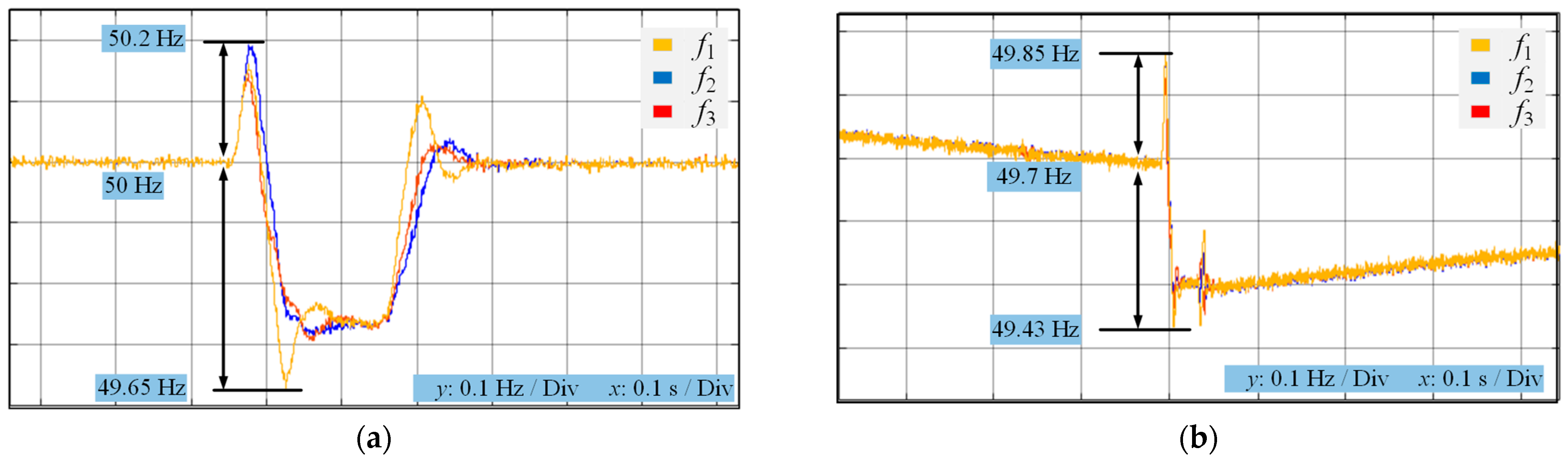
9. Experimental Results
9.1. Active Power Distribution
9.2. Frequency Restoration
10. Comparisons with Other Control Strategies
11. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. System Matrices
Appendix B
Appendix B.1. Adjacency Matrix
Appendix B.2. Degree Matrix
Appendix B.3. Laplacian Matrix
References
- Guerrero, J.M.; Chandorkar, M.; Lee, T.L.; Loh, P.C. Advanced Control Architectures for Intelligent Microgridspart i: Decentralized and Hierarchical Control. IEEE Trans. Ind. Electron. 2013, 60, 1254–1262. [Google Scholar] [CrossRef] [Green Version]
- Ramos, F.; Pinheiro, A.; Nascimento, R.; de Araujo Silva Junior, W.; Mohamed, M.A.; Annuk, A.; Marinho, M.H. Development of Operation Strategy for Battery Energy Storage System into Hybrid AC Microgrids. Sustainability 2022, 14, 13765. [Google Scholar] [CrossRef]
- Mohamed, M.A. A relaxed consensus plus innovation based effective negotiation approach for energy cooperation between smart grid and microgrid. Energy 2022, 252, 123996. [Google Scholar] [CrossRef]
- Abouzeid, S.I.; Guo, Y.; Zhang, H. Coordinated Control of the Conventional Units, Wind Power, and Battery Energy Storage System for Effective Support in the Frequency Regulation Service. Int. Trans. Electr. Energy Syst. 2019, 29, e2845. [Google Scholar] [CrossRef]
- Bharti, D.; De, M. Framework for Multipoint Optimal Reactive Power Compensation in Radial Distribution System with High Distributed Generation Penetration. Int. Trans. Electr. Energy Syst. 2019, 29, e12007. [Google Scholar] [CrossRef]
- Han, H.; Hou, X.; Yang, J.; Wu, J.; Su, M.; Guerrero, J.M. Review of Power Sharing Control Strategies for Islanding Operation of AC Microgrids. IEEE Trans. Smart Grid 2016, 7, 200–215. [Google Scholar] [CrossRef] [Green Version]
- Han, Y.; Zhang, K.; Li, H.; Coelho, E.A.A.; Guerrero, J.M. MAS-Based Distributed Coordinated Control and Optimization in Microgrid and Microgrid Clusters: A Comprehensive Overview. IEEE Trans. Power Electron. 2018, 33, 6488–6508. [Google Scholar] [CrossRef] [Green Version]
- Han, Y.; Li, H.; Shen, P.; Coelho, E.A.A.; Guerrero, J.M. Review of Active and Reactive Power Sharing Strategies in Hierarchical Controlled Microgrids. IEEE Trans. Power Electron. 2017, 32, 2427–2451. [Google Scholar] [CrossRef] [Green Version]
- Guerrero, J.M.; Matas, J.; de Vicuna, L.G.; Castilla, M.; Miret, J. Decentralized Control for Parallel Operation of Distributed Generation Inverters Using Resistive Output Impedance. IEEE Trans. Ind. Electron. 2007, 54, 994–1004. [Google Scholar] [CrossRef]
- Guerrero, J.M.; De Vicuña, L.G.; Matas, J.; Miret, J.; Castilla, M. Output Impedance Design of Parallel-Connected UPS Inverters. IEEE Int. Symp. Ind. Electron. 2004, 2, 1123–1128. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Matas, J.; De Vicuña, L.G.; Castilla, M.; Miret, J. Wireless-Control Strategy for Parallel Operation of Distributed-Generation Inverters. IEEE Trans. Ind. Electron. 2006, 53, 1461–1470. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vásquez, J.C.; Matas, J.; Castilla, M.; García de Vicuna, L. Control Strategy for Flexible Microgrid Based on Parallel Line-Interactive UPS Systems. IEEE Trans. Ind. Electron. 2009, 56, 726–736. [Google Scholar] [CrossRef]
- De Brabandere, K.; Bolsens, B.; Van Den Keybus, J.; Woyte, A.; Driesen, J.; Belmans, R. A Voltage and Frequency Droop Control Method for Parallel Inverters. IEEE Trans. Power Electron. 2004, 4, 2501–2507. [Google Scholar] [CrossRef]
- Alizadeh, E.; Birjandi, A.M.; Hamzeh, M. Decentralised Power Sharing Control Strategy in LV Microgrids under Unbalanced Load Conditions. IET Gener. Transm. Distrib. 2017, 11, 1613–1623. [Google Scholar] [CrossRef]
- Xia, Y.; Peng, Y.; Wei, W. Triple Droop Control Method for Ac Microgrids. IET Power Electron. 2017, 10, 1705–1713. [Google Scholar] [CrossRef]
- Hossain, M.A.; Pota, H.R.; Hossain, M.J.; Blaabjerg, F. Evolution of Microgrids with Converter-Interfaced Generations: Challenges and Opportunities. Int. J. Electron. Power Energy Syst. 2019, 109, 160–186. [Google Scholar] [CrossRef]
- Bidram, A.; Nasirian, V.; Davoudi, A.; Lewis, F.L. Droop-Free Distributed Control of AC Microgrids. IEEE Trans. Power Electron. 2016, 31, 1600–1617. [Google Scholar] [CrossRef] [Green Version]
- Bidram, A.; Member, S.; Davoudi, A.; Lewis, F.L.; Guerrero, J.M.; Member, S. Distributed Cooperative Secondary Control of Microgrids Using Feedback Linearization. IEEE Trans. Power Electron. 2013, 28, 3462–3470. [Google Scholar] [CrossRef] [Green Version]
- Lu, L.Y.; Chu, C.C. Consensus-Based Secondary Frequency and Voltage Droop Control of Virtual Synchronous Generators for Isolated AC Micro-Grids. IEEE J. Emerg. Sel. Top. Circuits Syst. 2015, 5, 443–455. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, H.; Li, C. Distributed Finite-Time Cooperative Control of Droop-Controlled Microgrids under Switching Topology. IET Renew. Power Gener. 2017, 11, 707–714. [Google Scholar] [CrossRef]
- Sanjari, M.J.; Gharehpetian, G.B. Unified Framework for Frequency and Voltage Control of Autonomous Microgrids. IET Gener. Transm. Distrib. 2013, 7, 965–972. [Google Scholar] [CrossRef]
- Shahid, M.U.; Khan, M.M.; Xu, J.; Hashmi, K.; Habib, S.; Mumtaz, M.A.; Tang, H. A Hierarchical Control Methodology for Renewable Dc Microgrids Supporting a Variable Communication Network Health. Electronics 2018, 7, 418. [Google Scholar] [CrossRef] [Green Version]
- Lewis, F.L.; Qu, Z.; Davoudi, A.; Bidram, A. Secondary Control of Microgrids Based on Distributed Cooperative Control of Multi-Agent Systems. IET Gener. Transm. Distrib. 2013, 7, 822–831. [Google Scholar] [CrossRef] [Green Version]
- Liu, W.; Gu, W.; Xu, Y.; Wang, Y.; Zhang, K. General Distributed Secondary Control for Multi-Microgrids with Both PQ-Controlled and Droop-Controlled Distributed Generators. IET Gener. Transm. Distrib. 2017, 11, 707–718. [Google Scholar] [CrossRef]
- Zuo, S.; Davoudi, A.; Song, Y.; Lewis, F.L. Distributed Finite-Time Voltage and Frequency Restoration in Islanded AC Microgrids. IEEE Trans. Ind. Electron. 2016, 63, 5988–5997. [Google Scholar] [CrossRef]
- Guo, F.; Wen, C.; Mao, J.; Song, Y.D. Distributed Secondary Voltage and Frequency Restoration Control of Droop-Controlled Inverter-Based Microgrids. IEEE Trans. Ind. Electron. 2015, 62, 4355–4364. [Google Scholar] [CrossRef]
- Agundis-Tinajero, G.; Segundo-Ramírez, J.; Visairo-Cruz, N.; Savaghebi, M.; Guerrero, J.M.; Barocio, E. Power Flow Modeling of Islanded AC Microgrids with Hierarchical Control. Int. J. Electr. Power Energy Syst. 2019, 105, 28–36. [Google Scholar] [CrossRef] [Green Version]
- Lu, X.; Yu, X.; Lai, J.; Guerrero, J.M.; Zhou, H. Distributed Secondary Voltage and Frequency Control for Islanded Microgrids With Uncertain Communication Links. IEEE Trans. Ind. Inform. 2017, 13, 448–460. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Wang, X.; Chen, Z.; Blaabjerg, F. Distributed Optimal Control of Reactive Power and Voltage in Islanded Microgrids. IEEE Trans. Ind. Appl. 2017, 53, 340–349. [Google Scholar] [CrossRef]
- Hashmi, K.; Khan, M.M.; Habib, S.; Tang, H. An Improved Control Scheme for Power Sharing between Distributed Power Converters in Islanded AC Microgrids. In Proceedings of the 2017 International Conference on Frontiers of Information Technology (FIT), Islamabad, Pakistan, 18–20 December 2017; IEEE: Piscataway, NJ, USA; pp. 270–275. [Google Scholar]
- Hashmi, K.; Mansoor Khan, M.; Jiang, H.; Umair Shahid, M.; Habib, S.; Talib Faiz, M.; Tang, H. A Virtual Micro-Islanding-Based Control Paradigm for Renewable Microgrids. Electronics 2018, 7, 105. [Google Scholar] [CrossRef]
- Schiffer, J.; Seel, T.; Raisch, J.; Sezi, T. Voltage Stability and Reactive Power Sharing in Inverter-Based Microgrids with Consensus-Based Distributed Voltage Control. IEEE Trans. Control Syst. Technol. 2016, 24, 96–109. [Google Scholar] [CrossRef] [Green Version]
- Guan, Y.; Meng, L.; Li, C.; Vasquez, J.; Guerrero, J. A Dynamic Consensus Algorithm to Adjust Virtual Impedance Loops for Discharge Rate Balancing of AC Microgrid Energy Storage Units. IEEE Trans. Smart Grid 2017, 3053, 4847–4860. [Google Scholar] [CrossRef] [Green Version]
- Lai, J.; Zhou, H.; Lu, X.; Yu, X.; Hu, W. Droop-Based Distributed Cooperative Control for Microgrids with Time-Varying Delays. IEEE Trans. Smart Grid 2016, 7, 1775–1789. [Google Scholar] [CrossRef]
- Hashmi, K.; Khan, M.M.; Shahid, M.U.; Nawaz, A.; Khan, A.; Jun, J.; Tang, H. An Energy Sharing Scheme Based on Distributed Average Value Estimations for Islanded AC Microgrids. Int. J. Electr. Power Energy Syst. 2020, 116, 105587. [Google Scholar] [CrossRef]
- Hashmi, K.; Khan, M.M.; Xu, J.; Shahid, M.U.; Habib, S.; Faiz, M.T.; Tang, H. A Quasi-Average Estimation Aided Hierarchical Control Scheme for Power Electronics-Based Islanded Microgrids. Electronics 2019, 8, 39. [Google Scholar] [CrossRef] [Green Version]
- Bidram, A.; Nasirian, V.; Davoudi, A.; Lewis, F.L. Cooperative Synchronization in Distributed Microgrid Control, 1st ed.; Grimble, M.J., Ed.; Springer International Publishing: Cham, Switzerland, 2017; ISBN 978-3-319-50807-8. [Google Scholar]
- Coelho, E.A.A.; Wu, D.; Guerrero, J.M.; Vasquez, J.C.; Dragičević, T.; Stefanović, Č.; Popovski, P. Small-Signal Analysis of the Microgrid Secondary Control Considering a Communication Time Delay. IEEE Trans. Ind. Electron. 2016, 63, 6257–6269. [Google Scholar] [CrossRef] [Green Version]
- Mahmoud, M.S.; AL-Sunni, F.M. Control and Optimization of Distributed Generation Systems, 1st ed.; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; ISBN 978-3-319-16909-5. [Google Scholar]
- Shenoi, B.A. Introduction to Digital Signal Processing and Filter Design, 1st ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2006; ISBN 13 978-0-471-46482-2. [Google Scholar]
- Nasirian, V.; Moayedi, S.; Davoudi, A.; Lewis, F.L. Distributed Cooperative Control of Dc Microgrids. IEEE Trans. Power Electron. 2015, 30, 2288–2303. [Google Scholar] [CrossRef]
- Mariani, V.; Vasca, F.; Vsquez, J.C.; Guerrero, J.M. Model Order Reductions for Stability Analysis of Islanded Microgrids With Droop Control. IEEE Trans. Ind. Electron. 2015, 62, 4344–4354. [Google Scholar] [CrossRef]
- Mathworks Simulink Reference, R2019a ed.; The MatWorks Inc.: Natick, MA, USA, 2019.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Lf | 1.35 mH | mp | 4.4 × 10−6 |
| Rf | 0.1 Ω | nq | 1.1 × 10−6 |
| Cf | 25 µF | kpf | 0.4 |
| Lc | 1.35 mH | kif | 0.5 |
| Rc | 0.05 Ω | kpV | 0.6 |
| Rline | 0.2 Ω | kiV | 0.3 |
| Lline | 0.6 mH | F | 0.6 |
| fnom | 50 Hz | ωc | 31.4 |
| Vnom | 380 VL-L |
| Bus No. | Loads Connected (p.u) | |
|---|---|---|
| P | Q | |
| 1 | 0 | 0 |
| 2 | 0.3 | 0.3 |
| 3 | 0.25 | 0.25 |
| 4 | 0.25 | 0.25 |
| 5 | 0 | 0 |
| Serial. No. | Control Parameters | ||
|---|---|---|---|
| 1. | Power Controller | Minimum | Maximum |
| Active power: mp | |||
| Reactive power: nq | |||
| 2. | Frequency regulation | ||
| kpf | 0.45 | 2.55 | |
| kif | 0.14 | 0.53 | |
| 3. | Voltage regulation | ||
| kpV | 0.51 | 3.52 | |
| kiV | 0.15 | 0.53 | |
| 4. | Communication time delay: τdelay | 0 | 2 s |
| Parameters | Symbol | Values | |
|---|---|---|---|
| System frequency (nominal) | f* | 50 Hz | |
| System voltage (nominal) | V* | 100 V | |
| Switching frequency | fs | 16 kHz | |
| DC link voltage | VDC | 150 V | |
| Zero level controllers | Voltage loop controller | KpV1 | 23 |
| KiV1 | 55 | ||
| Current loop controller | KpC1 | 42 | |
| KiC1 | 110 | ||
| Primary controllers | Active power controller | mp1 | 0.0035 rad /Watt |
| Reactive power controller | nQ1 | 10−4 rad /VA | |
| Secondary controllers | Voltage restorative controller | KpVr | 2.5 |
| KiVr | 0.5 | ||
| Frequency restorative controller | Kpfr | 3.5 | |
| Kifr | 0.8 | ||
| Quasi-average observer | a | 0.7 | |
| Communication delay | td | 10 ms (min)–2000 ms (max) | |
| Comparison Parameters | Proposed Multi-Agent Moving Average Method | Consensus-Based Methods [18,25,26,29,32] |
|---|---|---|
| Active power sharing | Convergence achieved in small time interval | Convergence in larger time interval |
| Voltage variations | Small variations have been observed that decay in small period of time | Larger variations that decay in longer period of time |
| Frequency variations | Small variations that decay in small period of time | Larger variations that decay in longer period of time |
| Convergence: frequency | Achieved in small time | Achieved in medium time |
| Convergence: voltage | Achieved in small time | Achieved in larger time |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdallah, W.J.; Hashmi, K.; Faiz, M.T.; Flah, A.; Channumsin, S.; Mohamed, M.A.; Ustinov, D.A. A Novel Control Method for Active Power Sharing in Renewable-Energy-Based Micro Distribution Networks. Sustainability 2023, 15, 1579. https://doi.org/10.3390/su15021579
Abdallah WJ, Hashmi K, Faiz MT, Flah A, Channumsin S, Mohamed MA, Ustinov DA. A Novel Control Method for Active Power Sharing in Renewable-Energy-Based Micro Distribution Networks. Sustainability. 2023; 15(2):1579. https://doi.org/10.3390/su15021579
Chicago/Turabian StyleAbdallah, Wael J., Khurram Hashmi, Muhammad Talib Faiz, Aymen Flah, Sittiporn Channumsin, Mohamed A. Mohamed, and Denis Anatolievich Ustinov. 2023. "A Novel Control Method for Active Power Sharing in Renewable-Energy-Based Micro Distribution Networks" Sustainability 15, no. 2: 1579. https://doi.org/10.3390/su15021579