Photogrammetric Methodology for the Production of Geomorphologic Maps: Application to the Veleta Rock Glacier (Sierra Nevada, Granada, Spain)


 , ,
, ,
Abstract
:1. Introduction
- Cartographic representation of the rock glacier, for example at a scale of 1/1,000 with a margin of error in the points of less than ±20 cm. This is the main objective of this study.
- Determination of the glacier dynamics through the time. Currently, we are working in this new methodology.
- The creation of a Digital Terrain Model (DTM) with enough points in order to obtain a geomorphic map of the Veleta rock glacier.
- Replacing costly photogrammetric flights using planes with less expensive photographs taken from the top of the surrounding mountains, or using balloons or hang-gliders.
- Elimination of extensive office work by a human operator in obtaining 3D points or contour lines by replacing photogrammetric restitution with an automatic method, which also eliminates human errors.
2. Characteristic of the Veleta Rock Glacier

3. Geomatic Methods
3.1. Geodetic Survey and GPS

3.2. Close range Photogrammetry (Conventional Photogrammetry)

- Method of photogrammetry with analytical plotter “Leica SD-2000”.
- The final result of accuracy in orientation was 6 cm planimetry (X, Y) and 8 cm altimetry (Z).
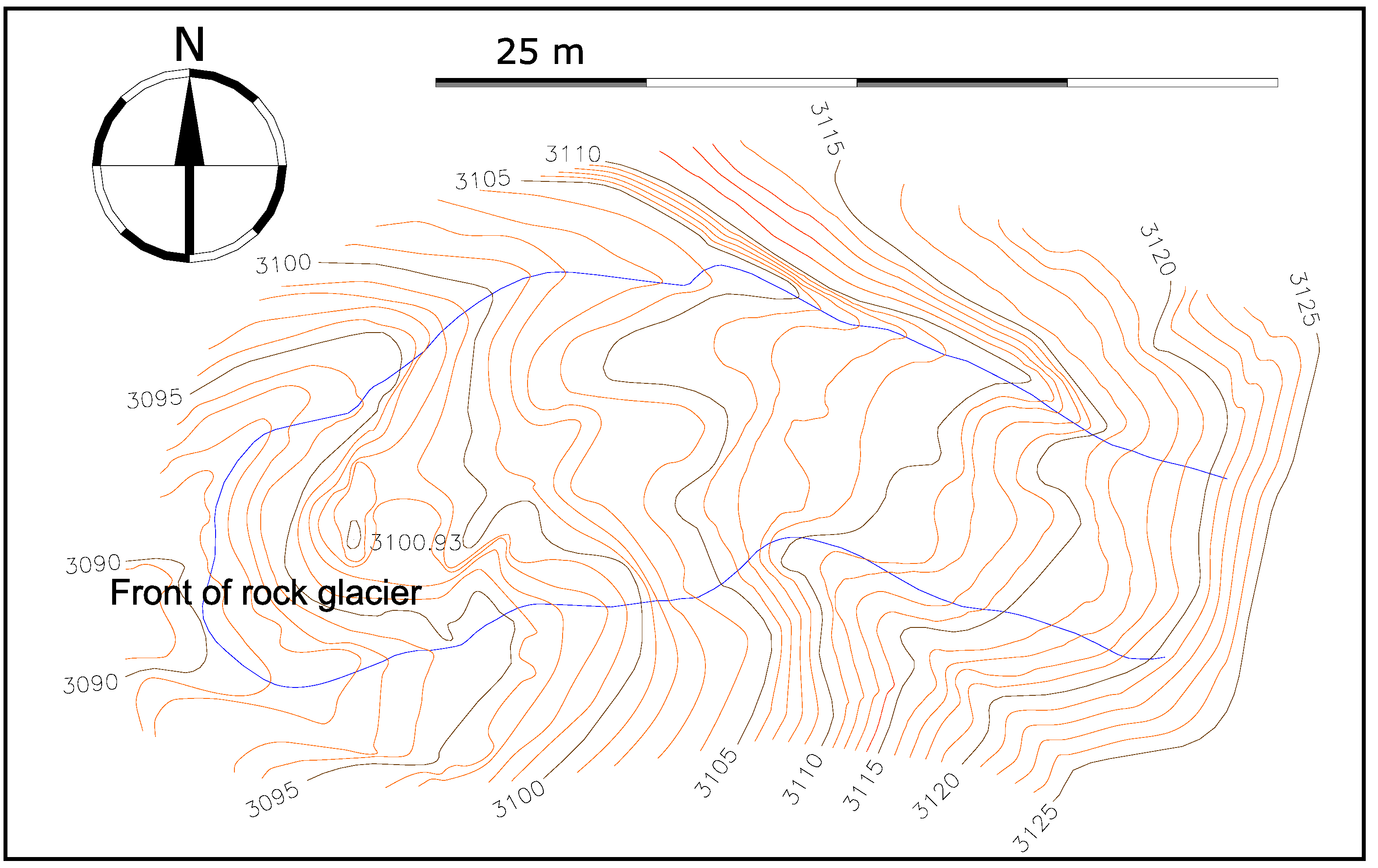
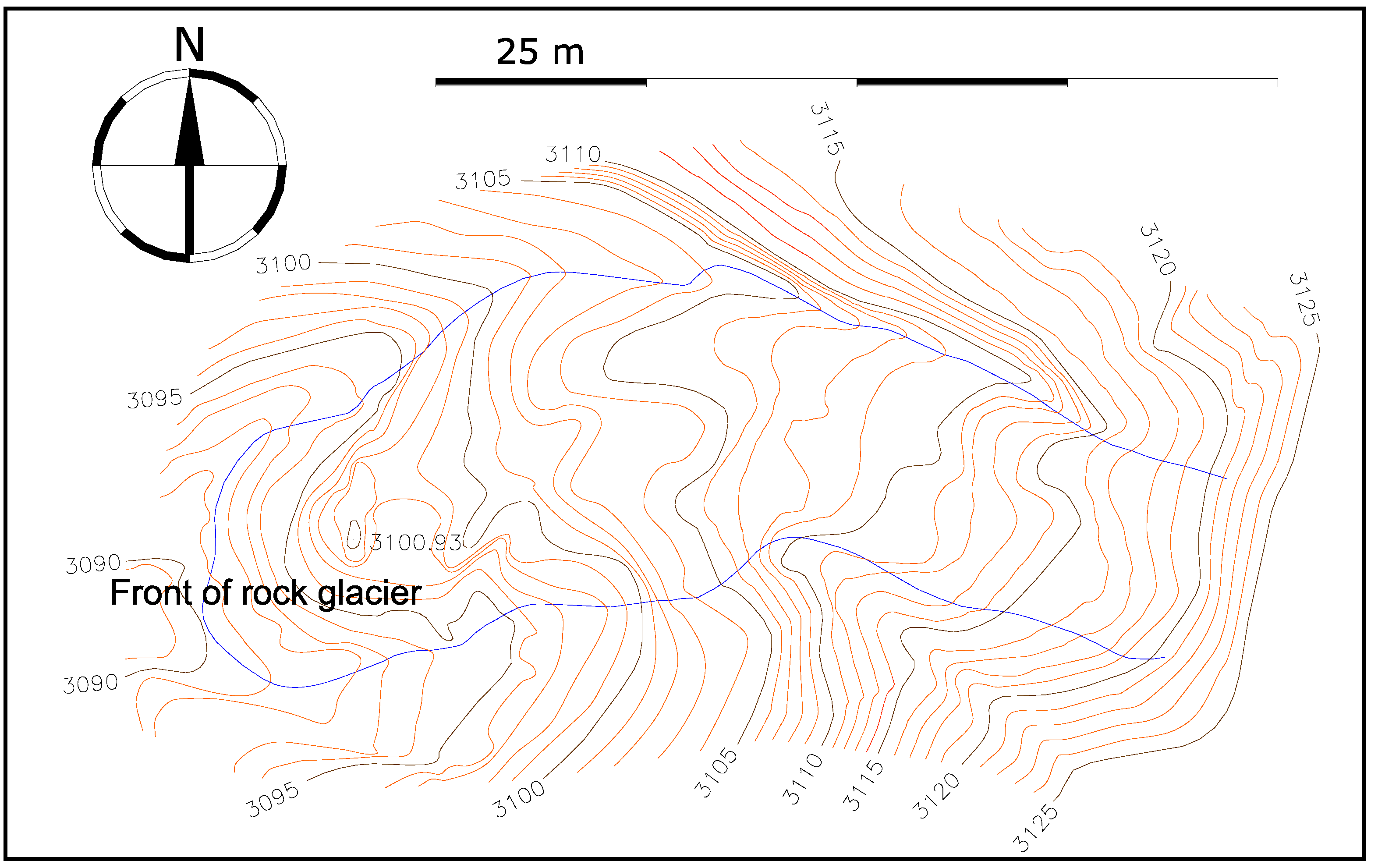
- The map was made from the stereoscopic orientation of the image pair through contour lines with the PRO600 software (Figure 4).
4. Computer vision for Photogrammetric Reconstruction
- Matching of points (between image pairs).
- Robust matching through the epipolar geometry: The epipolar geometry (a geometric constraint) of the image pair is computed by using robust statistic techniques. Matches that do not hold the epipolar constraint are removed as mismatches.
- Camera processing (pose estimation): We know the internal parameters of camera (focal lenght, principal point, radial distortion) and we estimate the rotation and translation of the cameras.
- DTM generation: This step requires the camera projection matrices and a triangulation process to obtain a 3D model of the geomorphologic structure.
4.1. Extraction of Features
4.2. Matching of Points
4.3. Robust Matching through the Epipolar Geometry
4.4. Camera Processing (Pose Estimation)
4.5. DTM Generation
5. Results and Discussion
- Extraction of features (SIFT). After using SIFT method in images 1 and 5 we get 136,232 keypoints and 94,775 keypoints respectively. As we explain in a previous section these keypoints are invariant to scale, pose, and changes of ilumination.
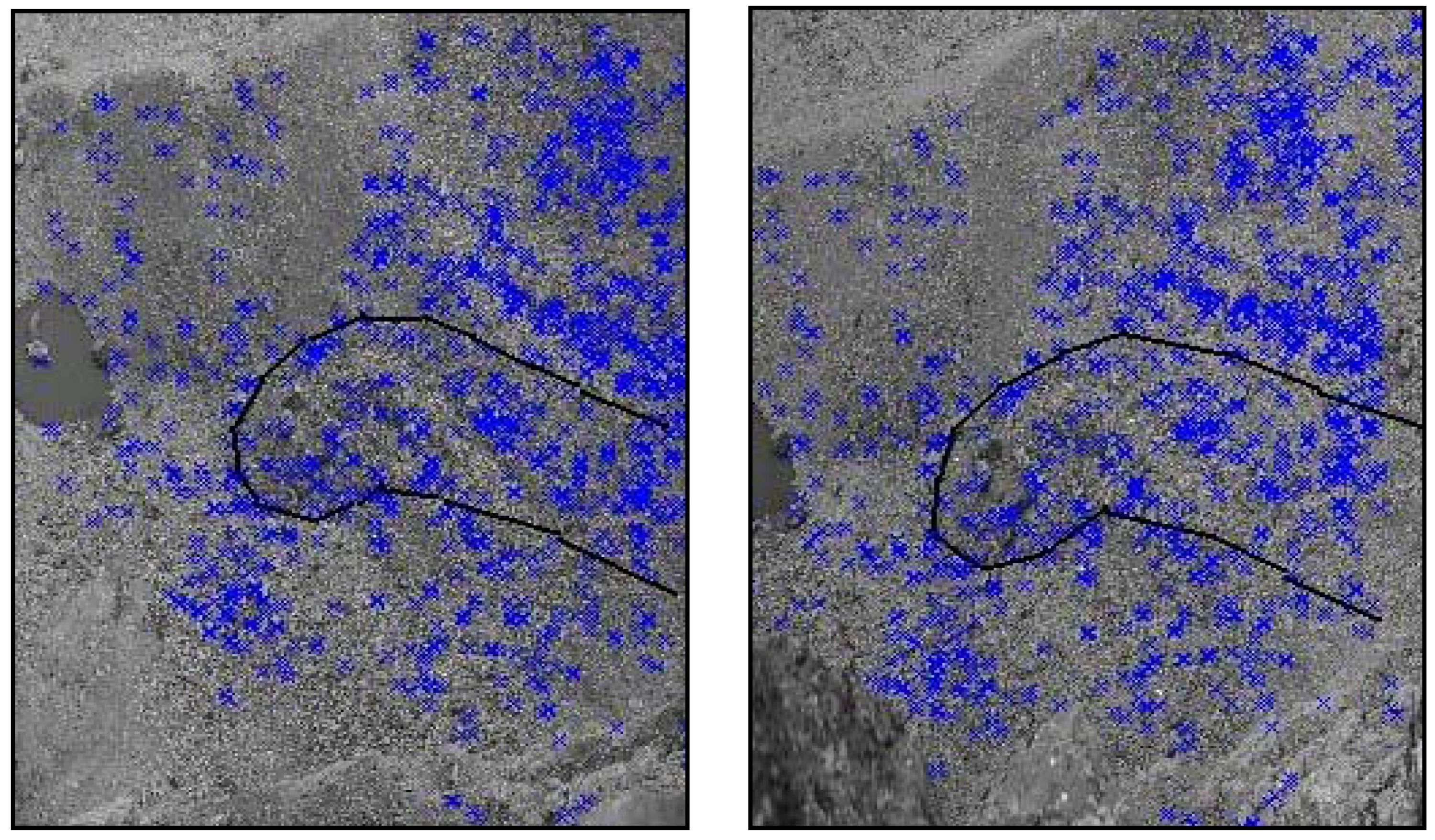
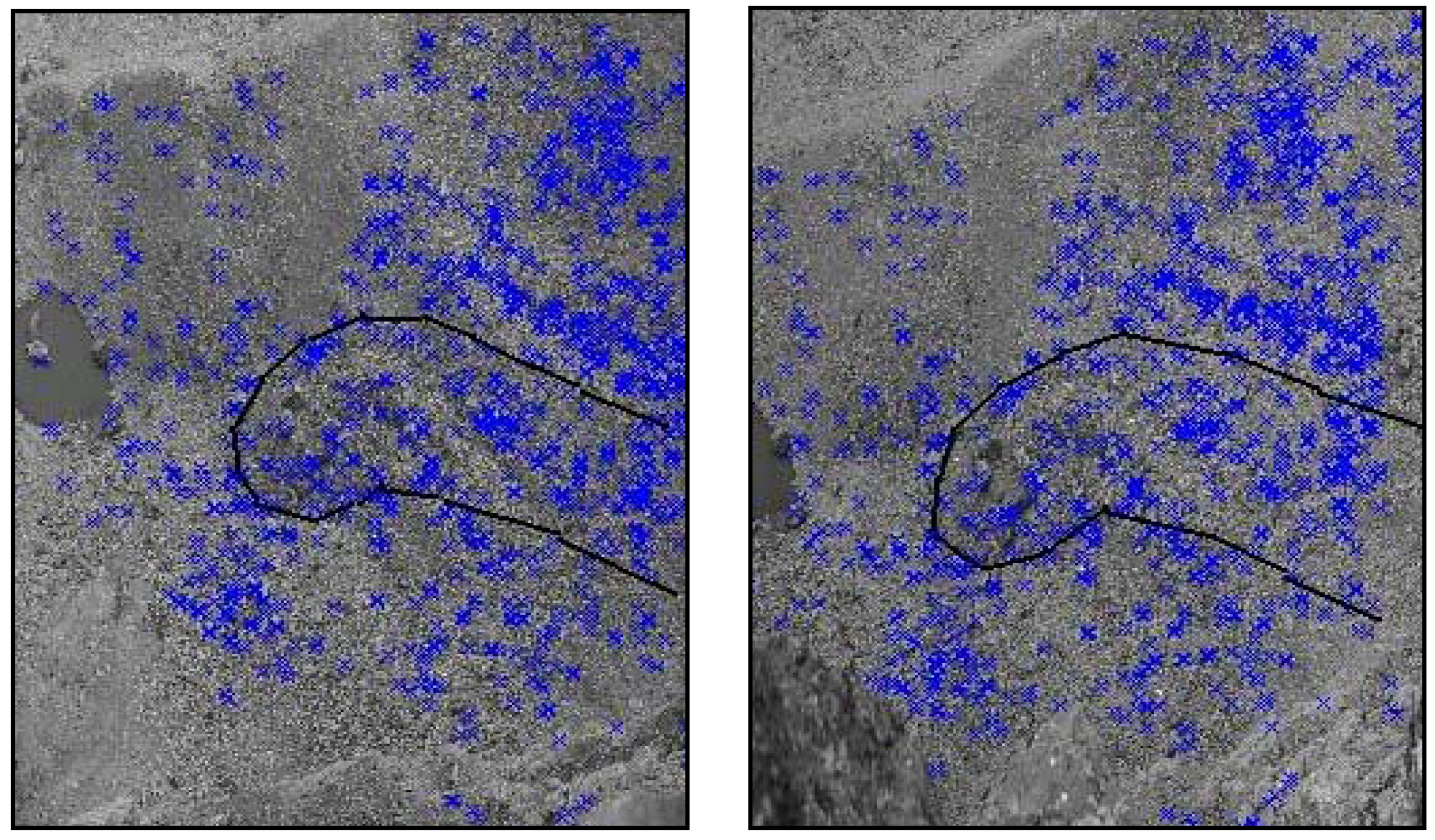
- Matching of points. The next step is the comparison of the two groups of keypoints. In this case we set a threshold of 0.6 for the distance between descriptors and we obtain 17,542 matching locations between image 1 and image 5. Figure 6 represents points (blue crosses) which have a matched point in the other image. Each represented point in left image has an equivalent point in the right image and vice versa.
- Robust matching through epipolar geometry. We use RANSAC method to calculate matrix F with SIFT matching points. The outliers percentage is very low, in this case there are two outliers and 15,540 inliers and a reprojection error average of 0.0594 pixels and a maximum of 3.36 pixels. In this case RANSAC use is not decisive, but it could be important in other examples to get robust matching.Figure 6. SIFT matched points denoted with crosses between two images of the Veleta rock glacier area.Figure 6. SIFT matched points denoted with crosses between two images of the Veleta rock glacier area.
![Remotesensing 01 00829 g006]()
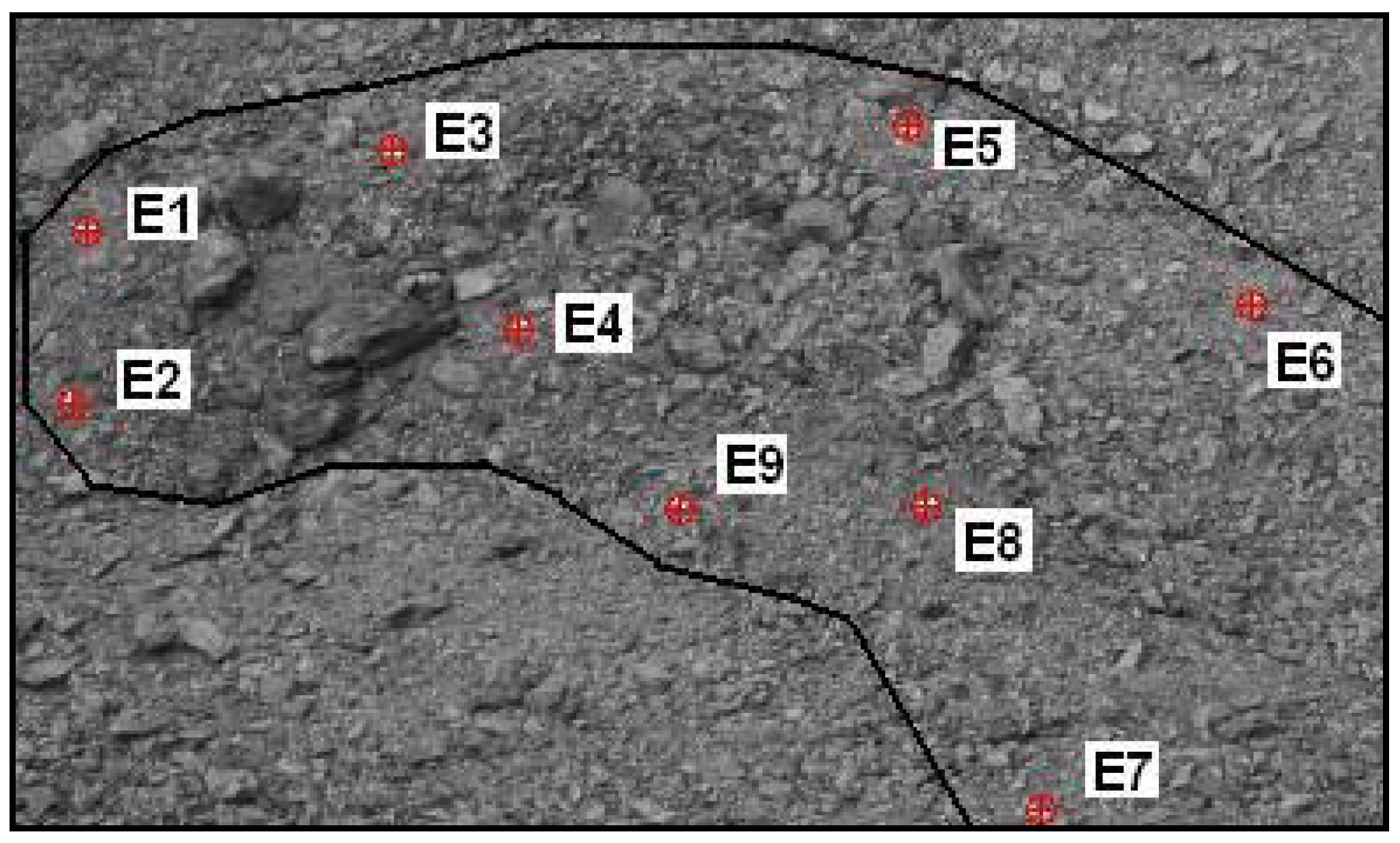
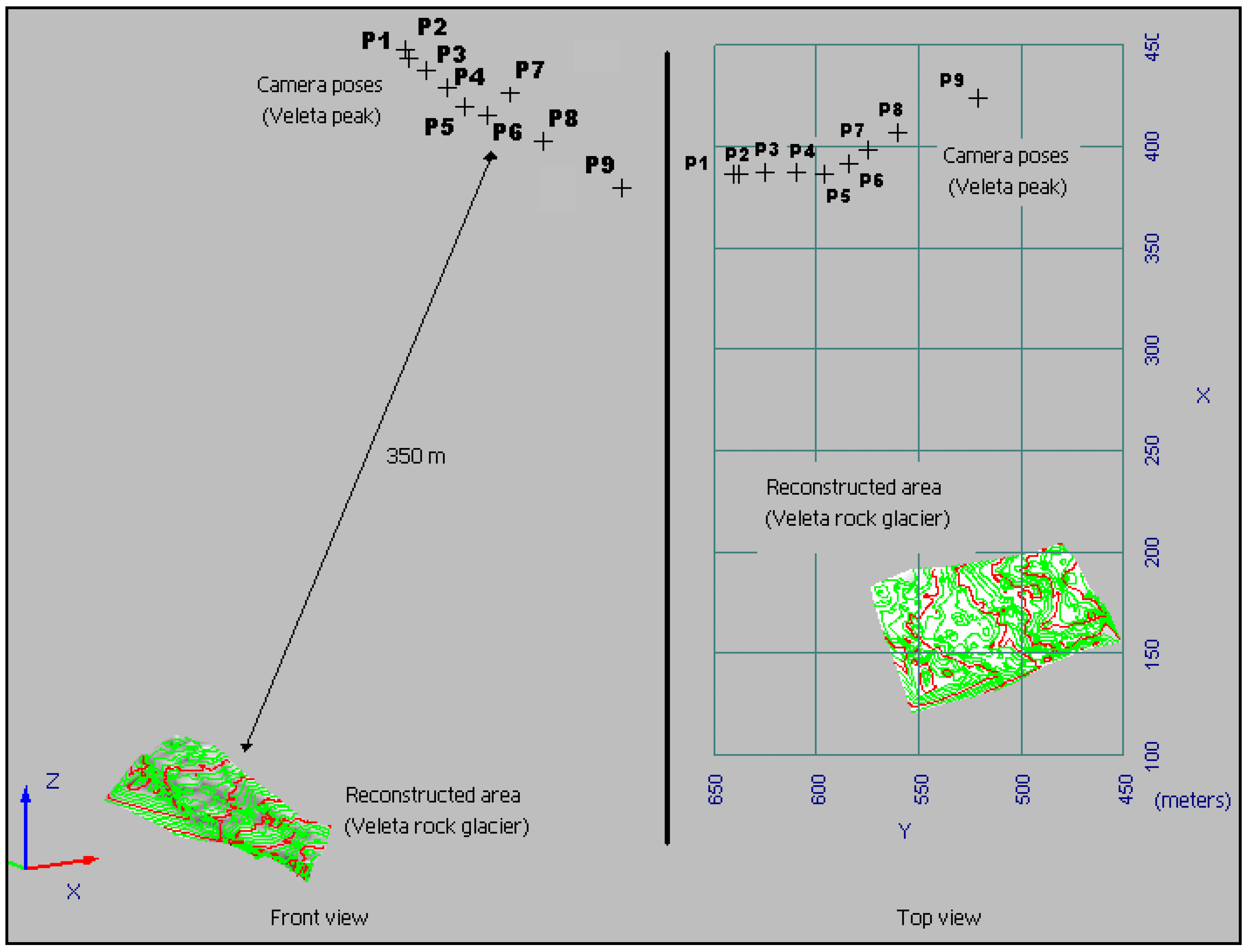
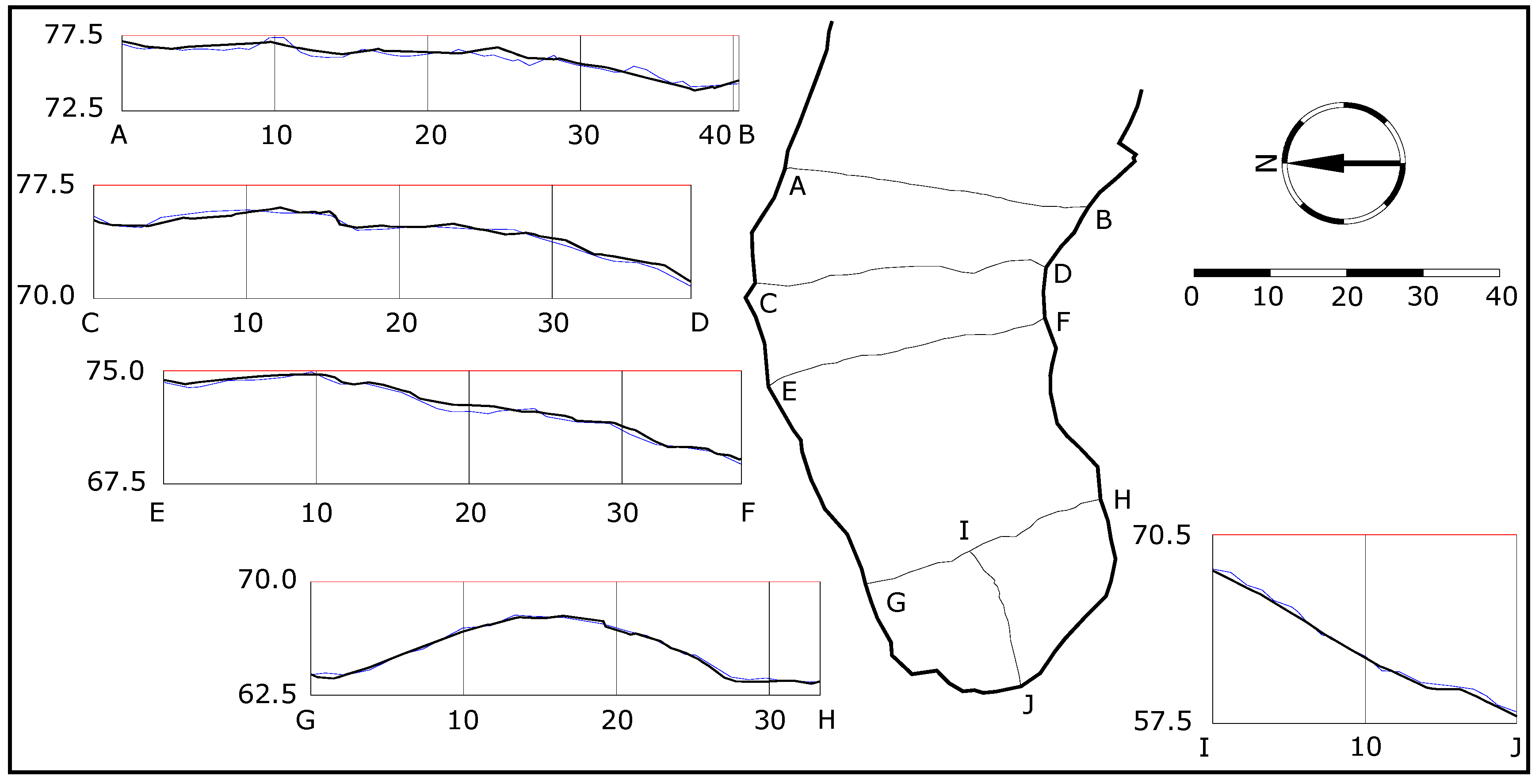
- Camera processing. We show in Table 1 the reprojection error (in the control points E1, E2, ..., E9) obtained computing the cameras (P1, P2, ..., P9) using bundle adjustment method. In Figure 7 we can observe the camera poses respect the rock glacier.Figure 7. Camera pose estimation (front view and top view).
![Remotesensing 01 00829 g007]()
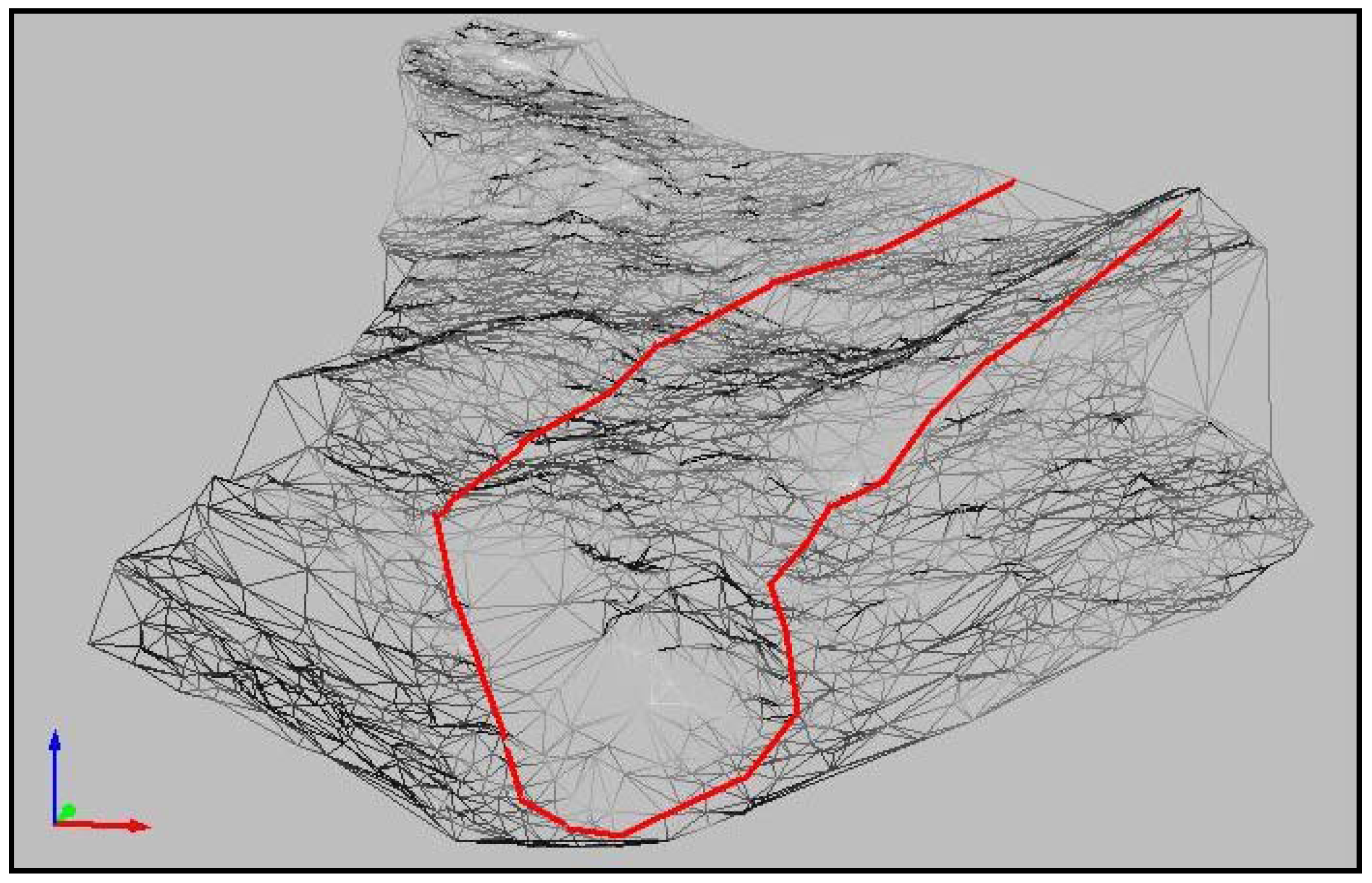
Table 1. Camera system accuracy in the year 2008. Cameras Average (in pixels) respect points {E1, …, E9} P1 0.69 P2 0.43 P3 0.53 P4 0.38 P5 0.53 P6 0.40 P7 0.45 P8 0.42 P9 0.63 Average all cameras (in pixels) 0.50 - DTM generation. Once we know the camera projection matrices we triangulate corresponding points to get a 3D reconstruction. We used the method propose in Section 4.5, getting a reprojection error average of 1.40 pixels and a maximun of 4.50 pixels. Therefore we have 15,540 points (X,Y,Z) of the rock glacier area which we can convert in a surface using a Delaunay triangulation (Figure 8).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
6. Conclusions
Acknowledgements
References and Notes
- Sanjosé, J.J.; Atkinson, A.D.J.; Salvador, F.; Gómez, A. Application of geomatic techniques to monitoring of the dynamics and to mapping of the Veleta rock glacier (Sierra Nevada, Spain). Zeitschift für Geomorphologie 2007, 51, 79–89. [Google Scholar] [CrossRef]
- Serrano, E.; Sanjosé, J.J.; Agudo, C. Rock glacier dynamics in a marginal periglacial high mountain environment: Flow, movement (1991–2000) and structure of the Argualas rock glacier, the Pyrenees. Geomorphology 2006, 74, 285–296. [Google Scholar] [CrossRef]
- Sanjosé, J.J.; Lerma, J.L. La fotogrametría digital: Una herramienta idónea para el cartografiado y modelado de zonas de alta montaña. In Congreso de periglaciarismo en montaña; Potes, Spain, 2001; pp. 185–203. [Google Scholar]
- Corripio, J.G. Snow surface albedo estimation using terrestrial photography. Int. J. Remote Sens. 2004, 25, 5705–5729. [Google Scholar] [CrossRef]
- Gómez, A.; Schulte, L.; Salvador, F.; Palacios, D.; Sanjosé, J.J.; Atkinson, A.D.J. Deglaciación reciente de Sierra Nevada. Repercusiones morfogenéticas, nuevos datos y perspectivas de estudio futuro. Cuadernos de investigación geográfica de la Universidad de la Rioja 2004, 30, 147–168. [Google Scholar] [CrossRef]
- Bauer, A.; Paar, G.; Kaufmann, V. Terrestrial laser scanning for rock glacier monitoring. In Proceedings of the 8th International Conference on Permafrost, Zurich, Switzerland; 2003; pp. 55–60. [Google Scholar]
- Kenyi, L.W.; Kaufmann, V. Estimation of rock glacier surface deformation using SAR interferometry data. IEEE TGARS 2003, 41, 1512–1515. [Google Scholar] [CrossRef]
- Roer, I.; Kääb, A.; Dikau, R. Rockglacier acceleration in the Turtmann valley (Swiss Alps): Probable controls. Norwegian J. Geography 2005, 50, 157–163. [Google Scholar] [CrossRef]
- Kääb, A.; Haeberli, W.; Gudmundsson, G.H. Analysing the creep of mountain permafrost using high precision aerial photogrammetry. 25 years of monitoring Gruben rock glacier. Swiss Alps. Permafrost Periglac. 1997, 8, 409–426. [Google Scholar] [CrossRef]
- Kääb, A.; Kneisel, C. Permafrost creep within a recently deglaciated glacier forefield: Muragl, Swiss Alps. Permafrost Periglac. 2006, 17, 79–85. [Google Scholar] [CrossRef]
- Kaufmann, V.; Ploesch, H. Mapping and visualization of the retreat of two cirque glaciers in the Austrian Hohe Tauern National Park. In XIX ISPRS Congress International Archives of Photogrammetry and Remote Sensing, Amsterdam, The Nederlands, July 16–22, 2000; 2000; Volume XXXIII, Part B4. pp. 446–453. [Google Scholar]
- Kaufmann, V.; Ladstädter, R.; Kienast, G. 10 Years of monitoring of the Doesen rock glacier (Ankogel group, Austria)—A review of the research activities for the time period 1995–2005. In 5th ICA Mountain Cartography Workshop, Bohinj, Slovenia, March 30–April 1, 2006; pp. 129–144.
- Sanjosé, J.J.; Lerma, J.L. Estimation of the rocks glaciers dynamics by environmental modeling and automatic photogrammetric technic. In XX Congress International Society for Photogrammetry and Remote Sensing, Commission VII, Istanbul, Turkey, July 12–23, 2004; Vol. XXXV-B7.
- Gómez, A.; Palacios, D.; Ramos, M.; Casas, A.; Sanjosé, J.J.; Atkinson, A.D.J. Permafrost, evolución de formas asociadas y comportamiento térmico en el corral del Veleta (Sierra Nevada, España), Últimos resultados. Boletín de la Real Sociedad Española de Historia Natural (Sección Geológica) 2004, 99, 47–63. [Google Scholar]
- Mikhail, E.M.; Bethel, J.S.; McGlone, J.C. Introduction to Modern Photogrammetry; John Wiley: NY, USA, 2001. [Google Scholar]
- Wolf, P.R.; Dewitt, B.A. Elements of Photogrammetry with aplications in GIS; McGraw Hill: Boston, MA, USA, 2000. [Google Scholar]
- López-Nicolás, G.; Guerrero, J.J.; Sanjosé, J.J. Automatic photogrammetry for the production of geomorphologic cartography. In Sixth International Conference on Geomorphology, Zaragoza, Spain, September 7–11, 2005.
- Lowe, D. Distinctive Image Features from Scale-Invariant Features. Int. J. Comput. Vision 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Zhang, Z.; Deriche, R.; Faugeras, O.; Luong, Q.T. A robust technique for matching two uncalibrated images through the recovery of the unknown epipolar geometry. Artificial Intelligence 1995, 78, 87–119. [Google Scholar] [CrossRef]
- Guerrero, J.J.; Sagüés, C. Robust line matching and estimate of homographies simultaneously. In Iberian Conference on Pattern Recognition and Image Analysis, 2652 Lecture Notes in Computer Science, Mallorca, Spain, June 4–6, 2003; pp. 297–307.
- Remodino, F. Detectors and descriptors for photogrammetric applications. In Photogrammetry and Computer Vision, Bonn, Germany, September 20–22, 2006.
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision, 2nd ed.; Cambridge University Press: NY, USA, 2004. [Google Scholar]
- Rousseeuw, P.; Leroy, A. Robust regression and outlier detection; John Wiley: New York, NY, USA, 1987. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. Assn. Comput. Mach. 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Triggs, B.; McLauchlan, P.; Hartley, R.; Fitzgibbon, A. Bundle adjustment – A modern synthesis. In Proceeding International ICCV Workshop on Vision Algorithms, Corfu, Greece, September 21–22, 1999; Springer: Berlin/Heidelberg, Germany, 2000; 1883, pp. 298–372. [Google Scholar]
- Torr, P.H.S. A Structure and Motion Toolkit in Matlab; Technical Report MSR-TR-2002-56; Microsoft Research: Cambridge, UK, 2002. [Google Scholar]
© 2009 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
De Matías, J.; De Sanjosé, J.J.; López-Nicolás, G.; Sagüés, C.; Guerrero, J.J. Photogrammetric Methodology for the Production of Geomorphologic Maps: Application to the Veleta Rock Glacier (Sierra Nevada, Granada, Spain). Remote Sens. 2009, 1, 829-841. https://doi.org/10.3390/rs1040829
De Matías J, De Sanjosé JJ, López-Nicolás G, Sagüés C, Guerrero JJ. Photogrammetric Methodology for the Production of Geomorphologic Maps: Application to the Veleta Rock Glacier (Sierra Nevada, Granada, Spain). Remote Sensing. 2009; 1(4):829-841. https://doi.org/10.3390/rs1040829
Chicago/Turabian StyleDe Matías, Javier, José Juan De Sanjosé, Gonzalo López-Nicolás, Carlos Sagüés, and José Jesús Guerrero. 2009. "Photogrammetric Methodology for the Production of Geomorphologic Maps: Application to the Veleta Rock Glacier (Sierra Nevada, Granada, Spain)" Remote Sensing 1, no. 4: 829-841. https://doi.org/10.3390/rs1040829
APA StyleDe Matías, J., De Sanjosé, J. J., López-Nicolás, G., Sagüés, C., & Guerrero, J. J. (2009). Photogrammetric Methodology for the Production of Geomorphologic Maps: Application to the Veleta Rock Glacier (Sierra Nevada, Granada, Spain). Remote Sensing, 1(4), 829-841. https://doi.org/10.3390/rs1040829