Automatic Ship Detection in Remote Sensing Images from Google Earth of Complex Scenes Based on Multiscale Rotation Dense Feature Pyramid Networks


Abstract
:
1. Introduction
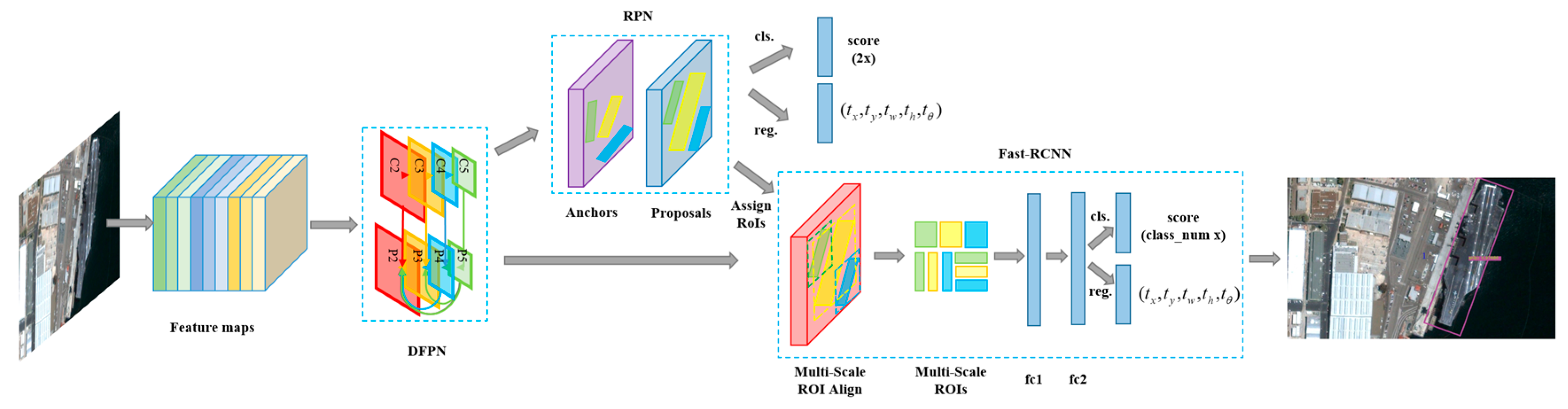
- Different from previous detection models, we build a new ship detection framework based on rotation regions which can handle different complex scenes, detect intensive objects, and reduce redundant detection regions.
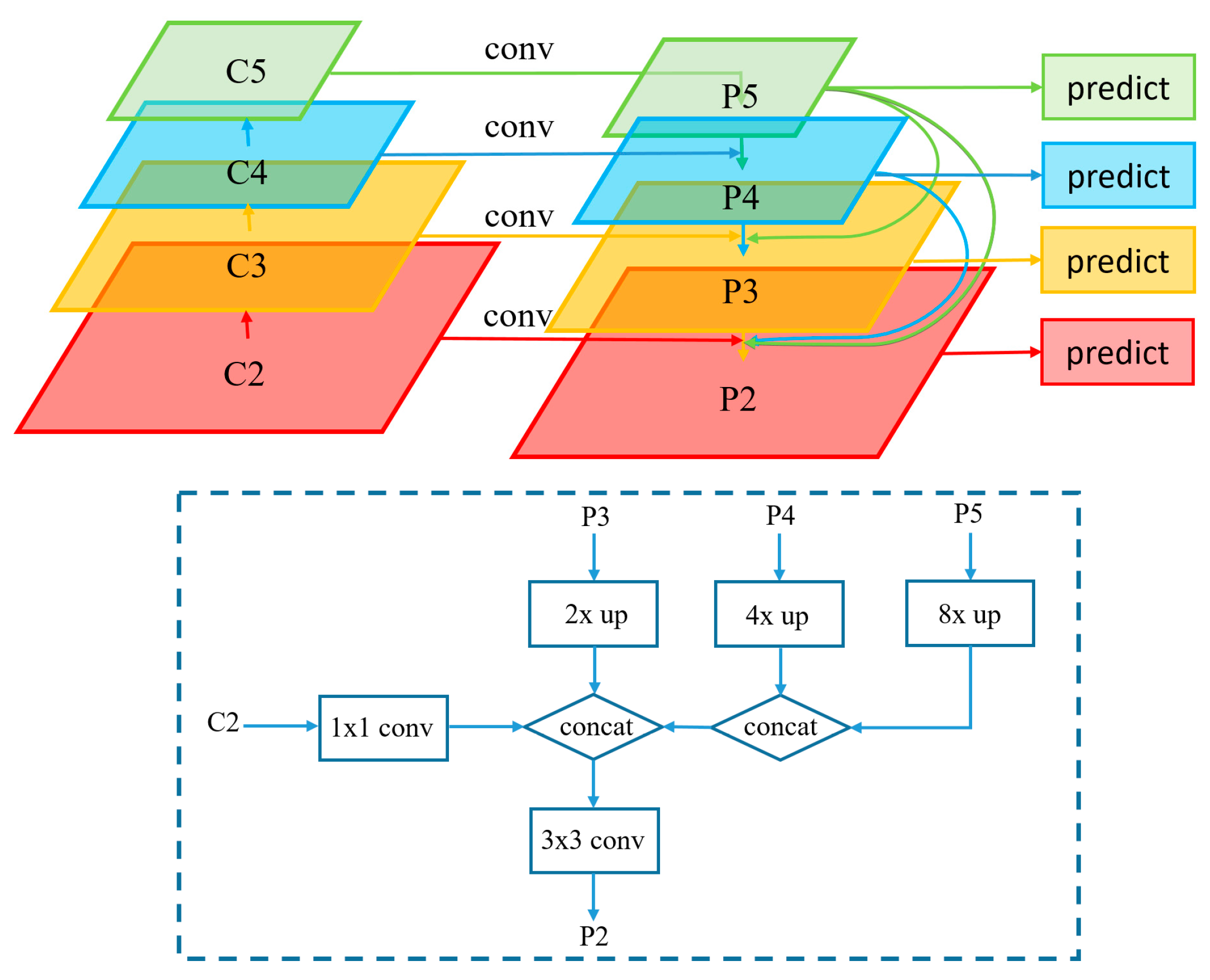
- We propose the feature pyramid of dense connections based on a multiscale detection framework, which enhances feature propagation, encourages feature reuse, and ensures the effectiveness of detecting multiscale objects.
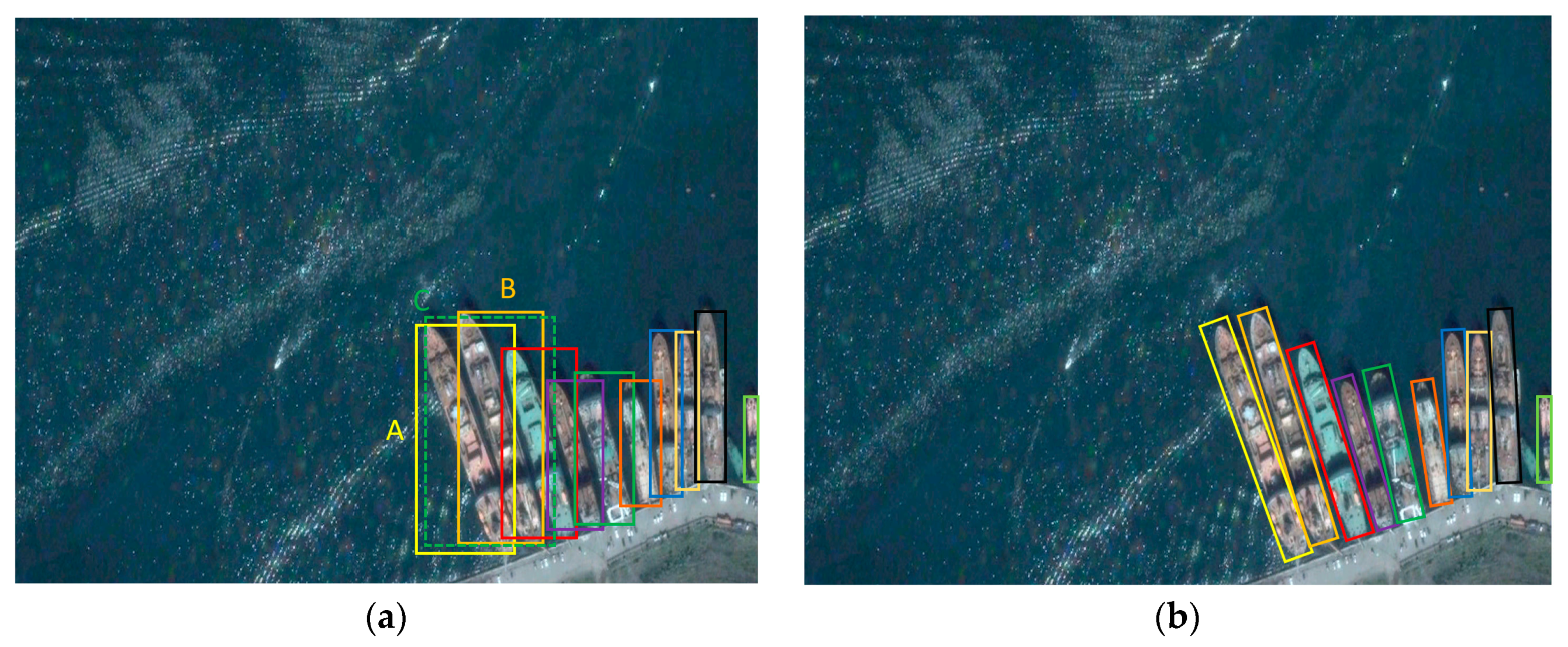
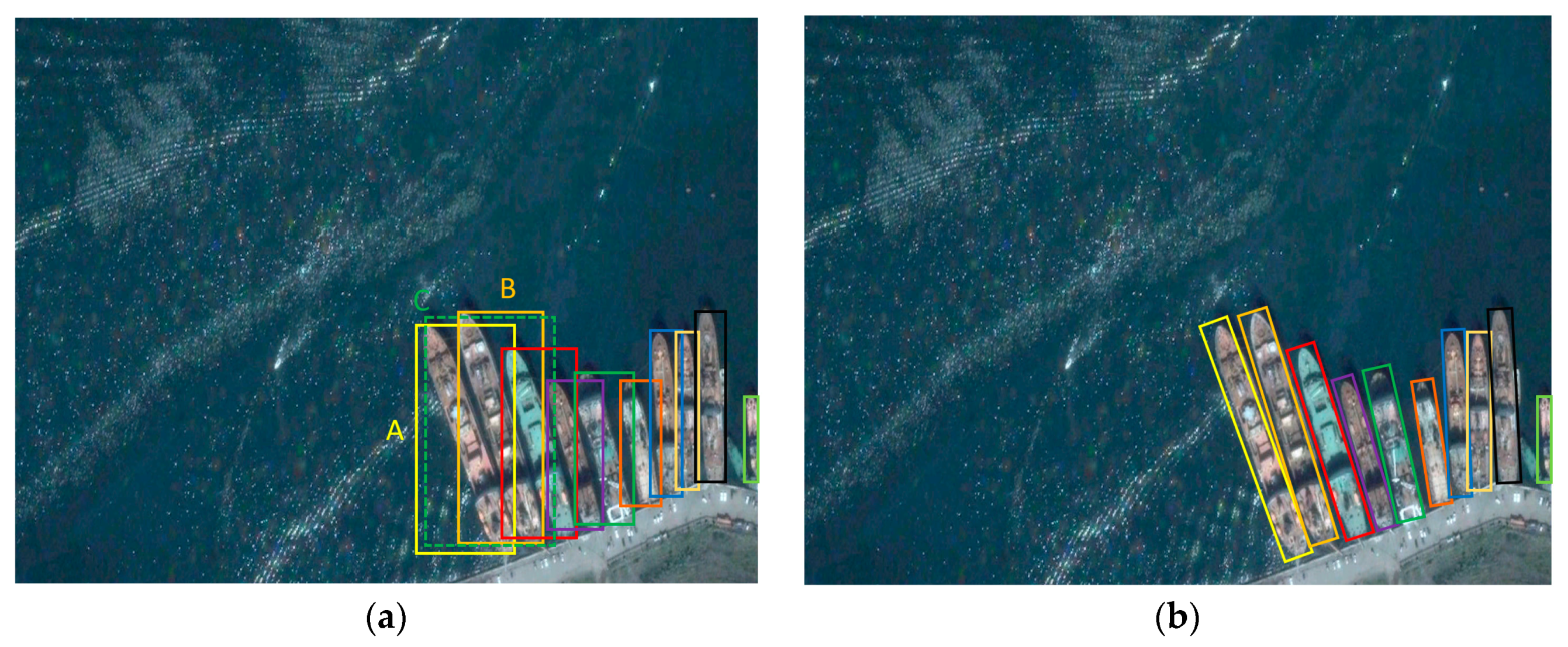
- We adopt rotation anchors to avoid the side effects of non-maximum suppression and overcome the difficulty of detecting densely arranged targets, and eventually get a higher recall.
- We use multiscale ROI Align to solve the problem of feature misalignment instead of ROI pooling, and to get the fixed-length feature and regression bounding box to fully keep the completeness of semantic and spatial information through the horizontal circumscribed rectangle of proposal.
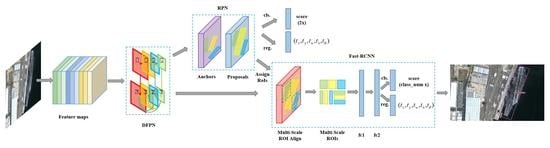
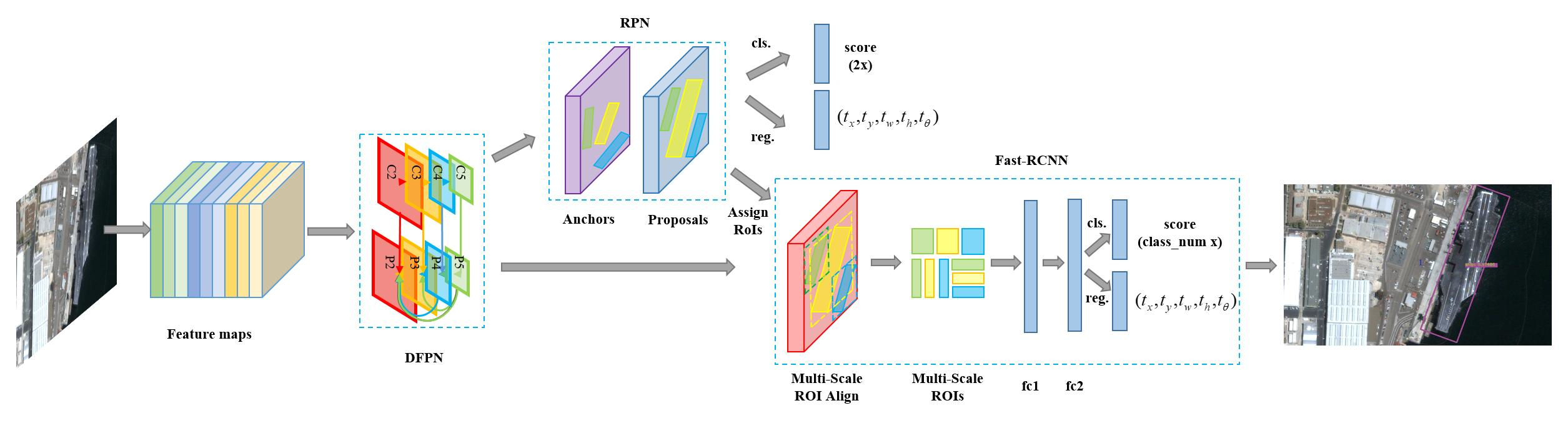
2. Proposed Method
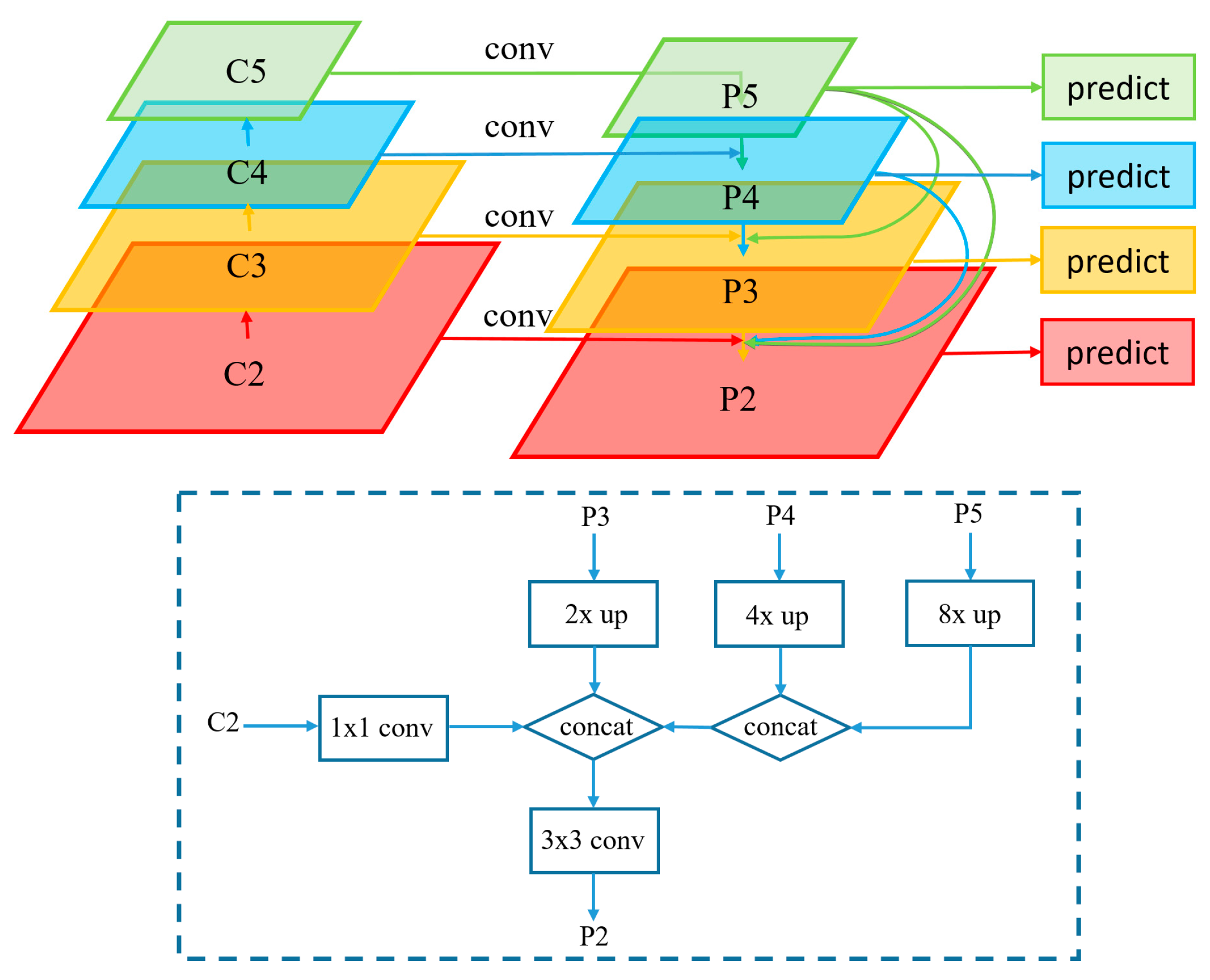
2.1. DFPN
2.2. RDN
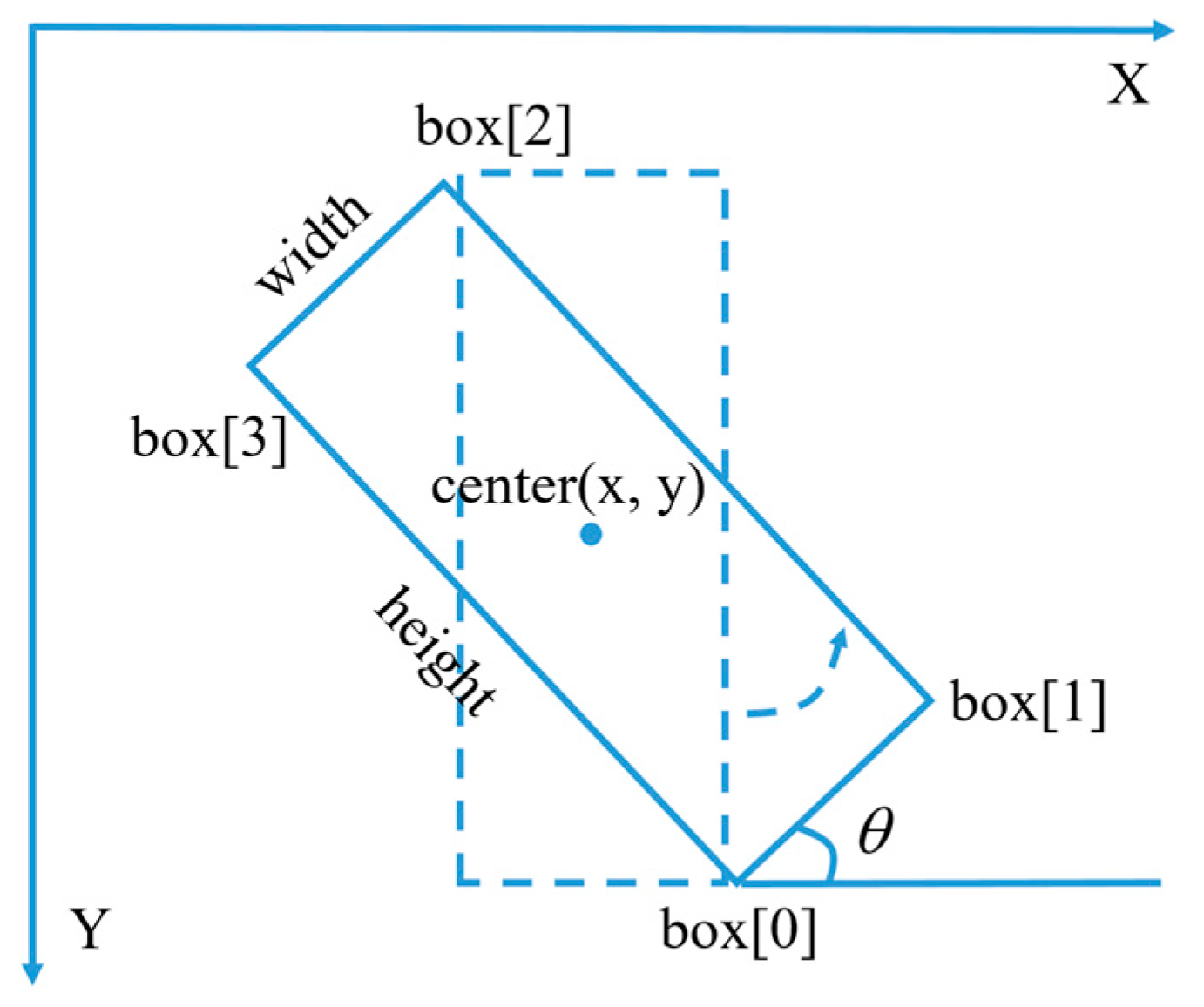
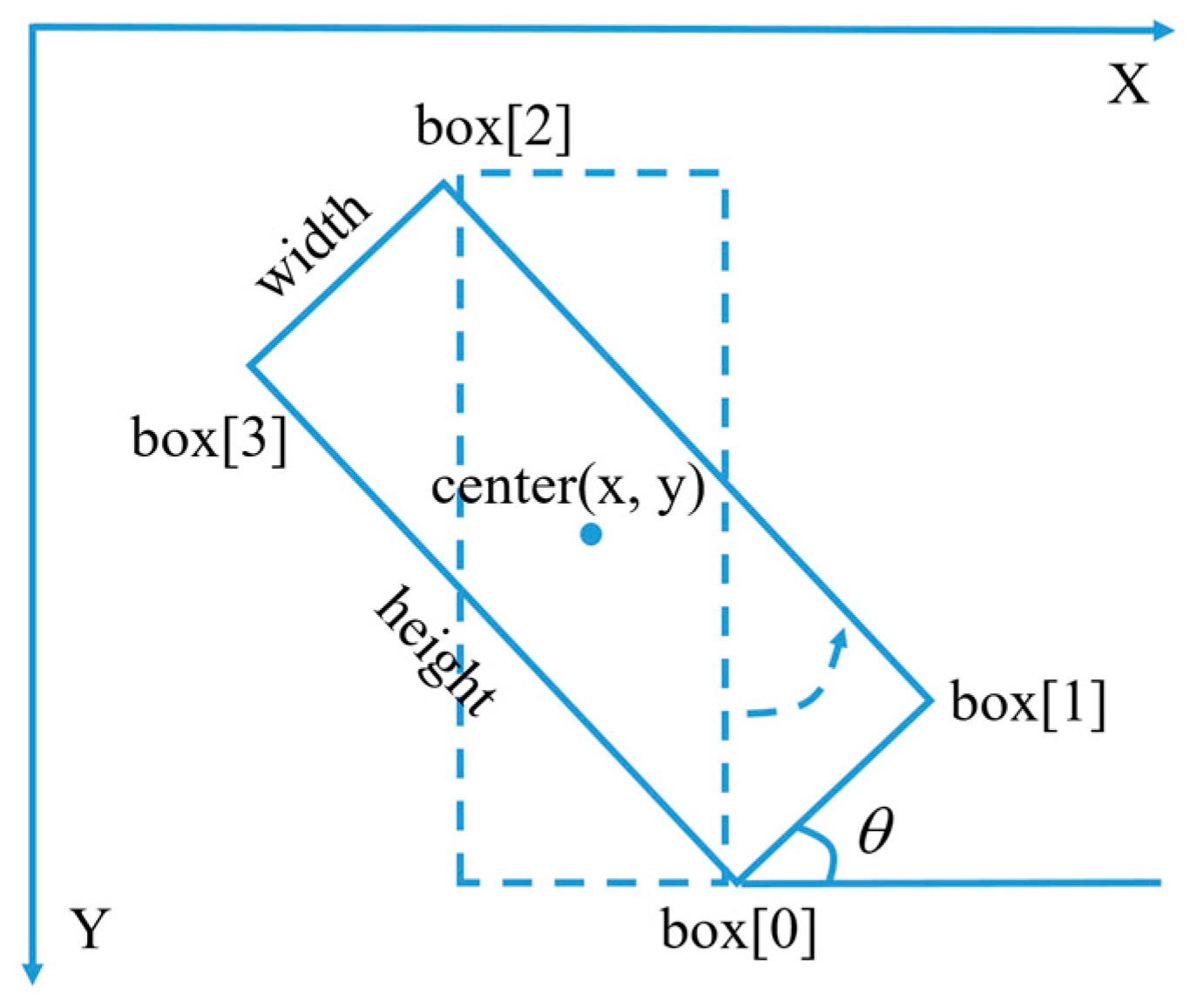
2.2.1. Rotation Bounding Box
2.2.2. Rotation Anchor/Proposal
2.2.3. Non-Maximum Suppression
2.2.4. Multiscale ROI Align
2.2.5. Loss Function
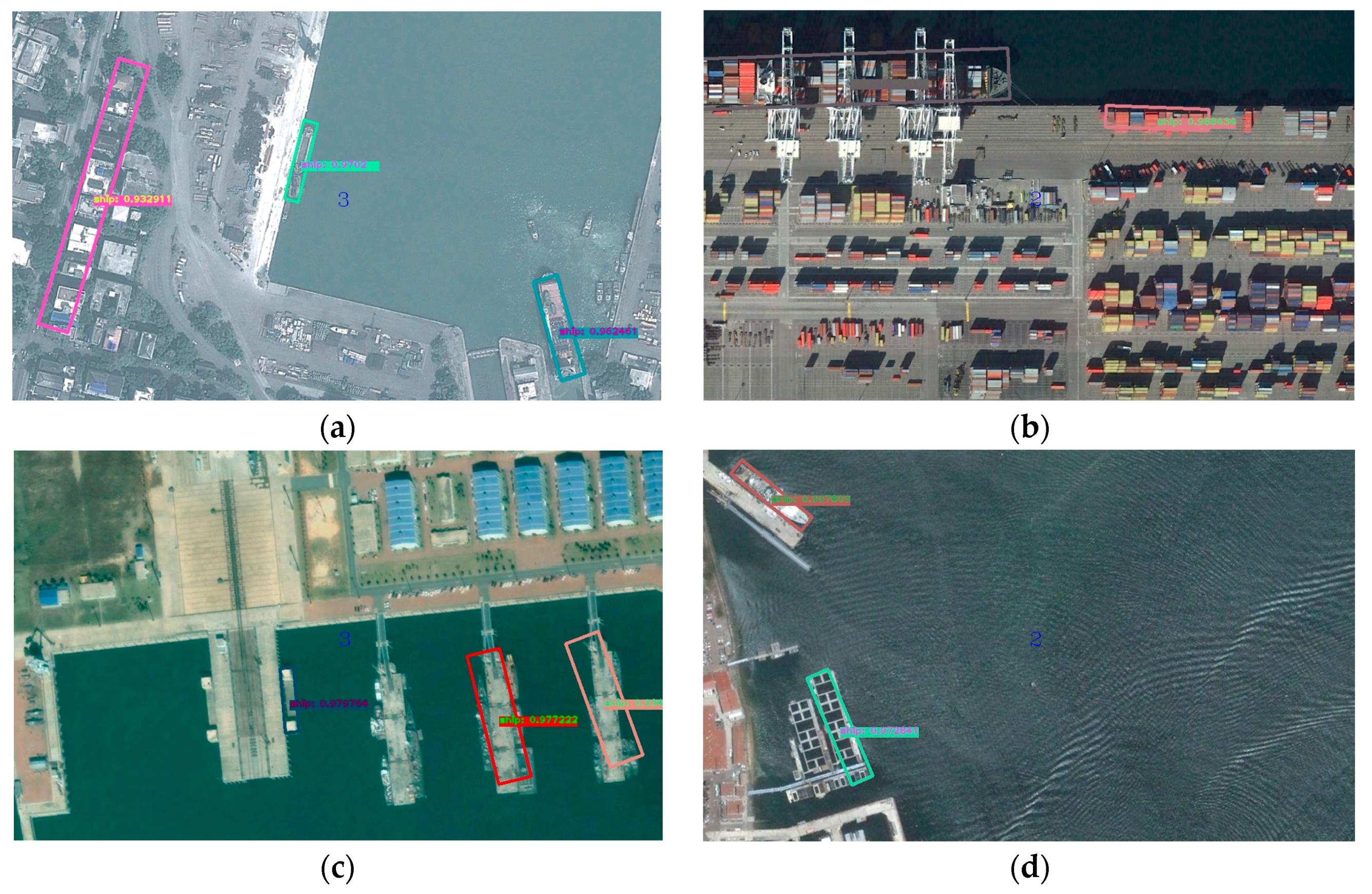
3. Experiments and Results
3.1. Implementation Details
3.1.1. Remote Sensing Dataset
3.1.2. Training
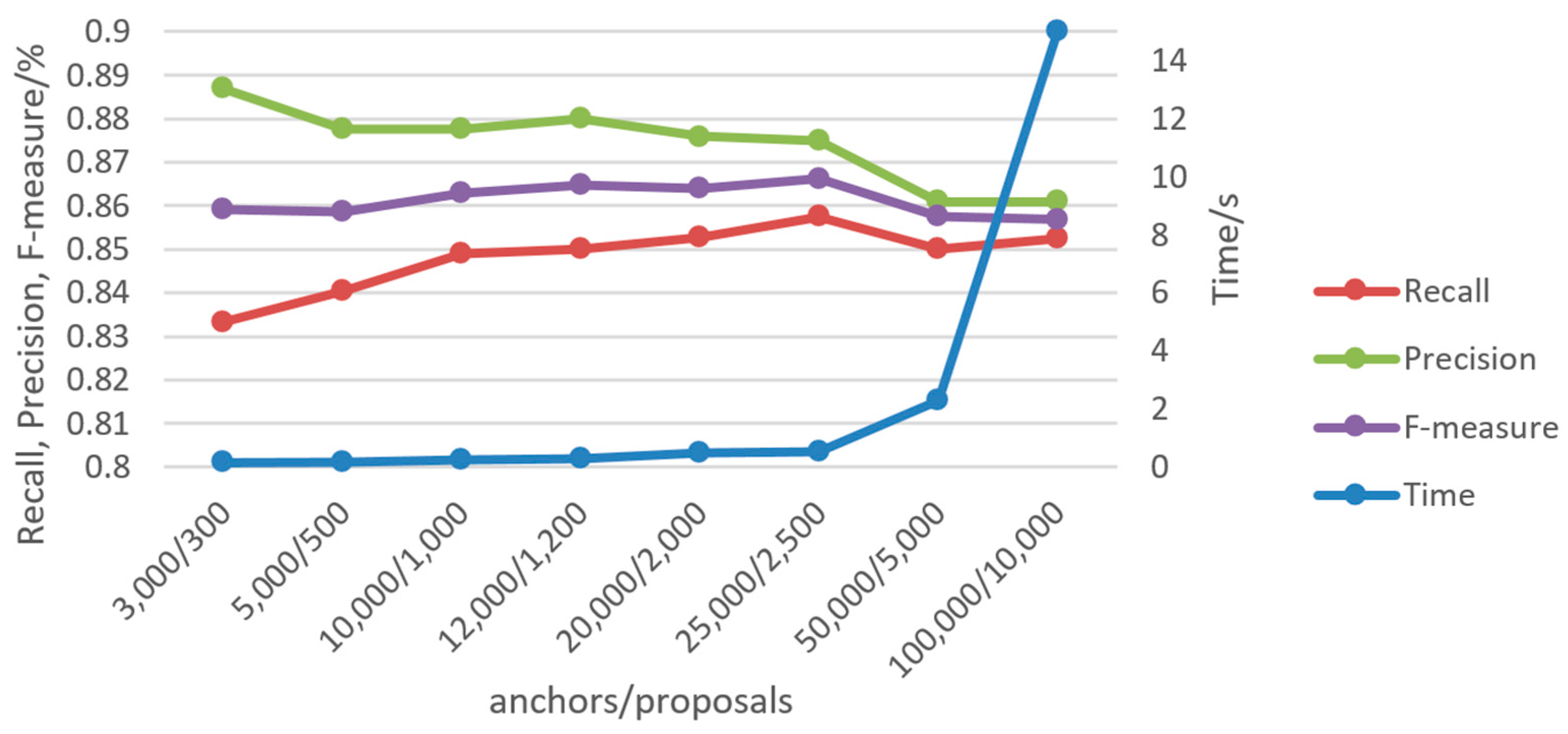
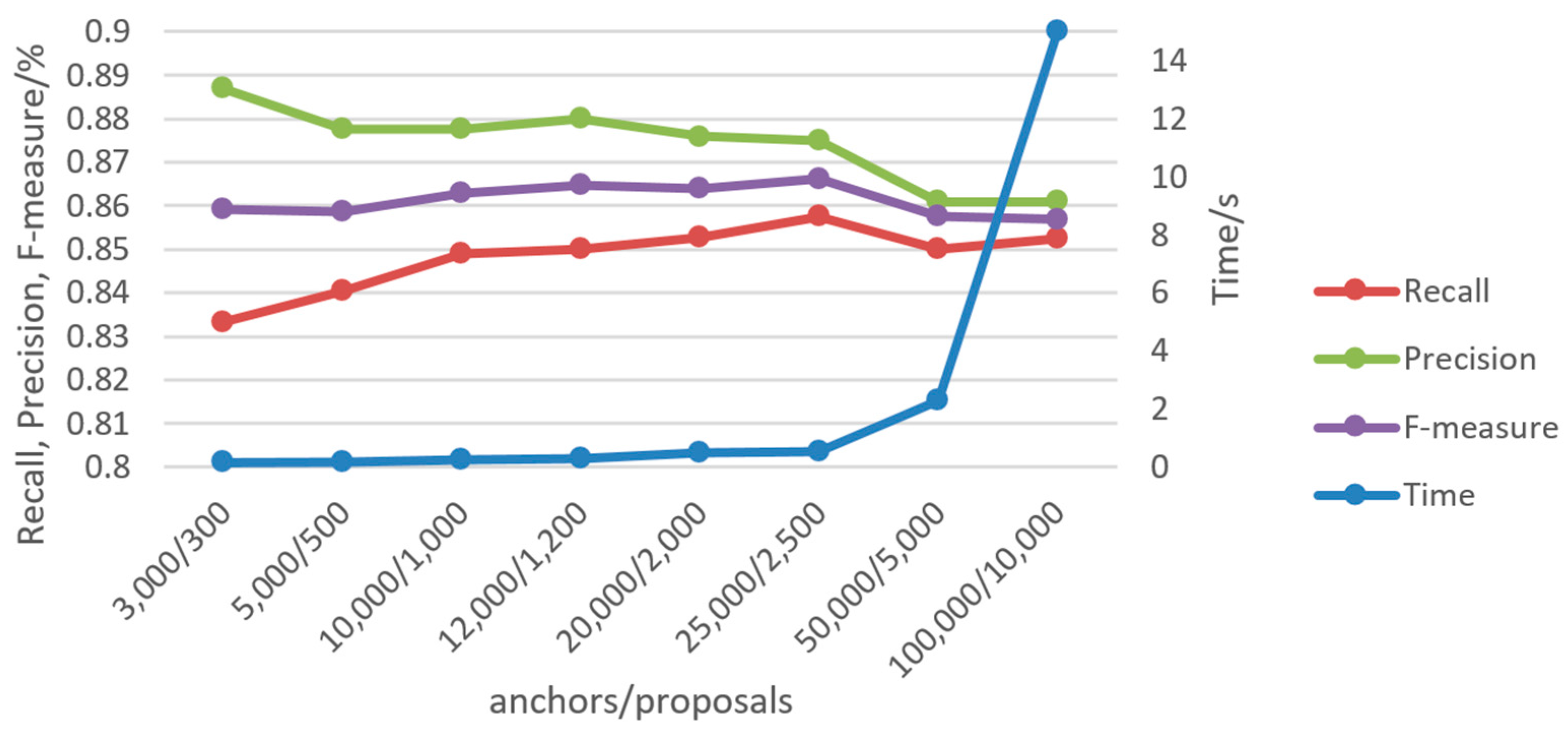
3.2. Accelerating Experiment
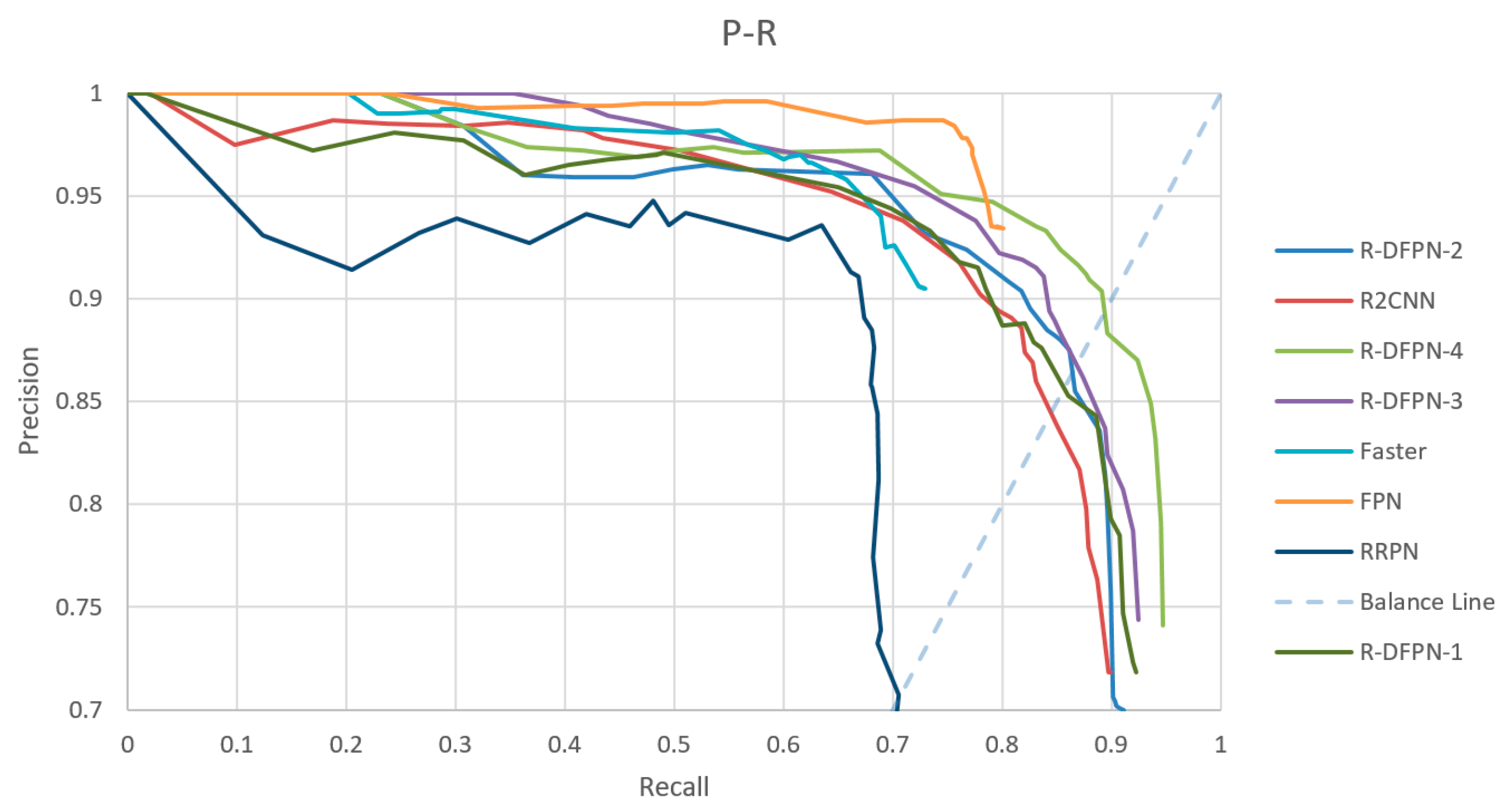
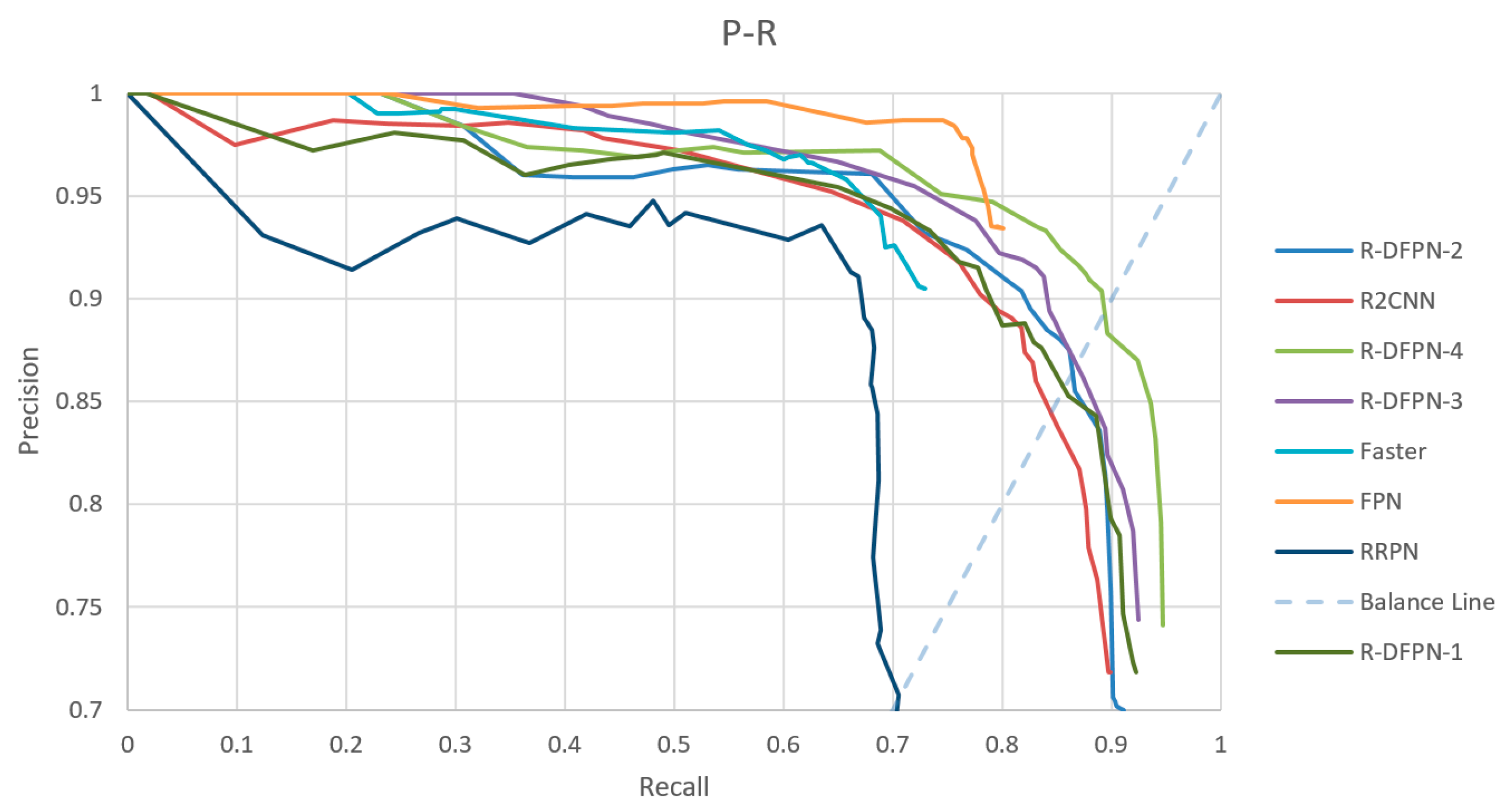
3.3. Comparative Experiment
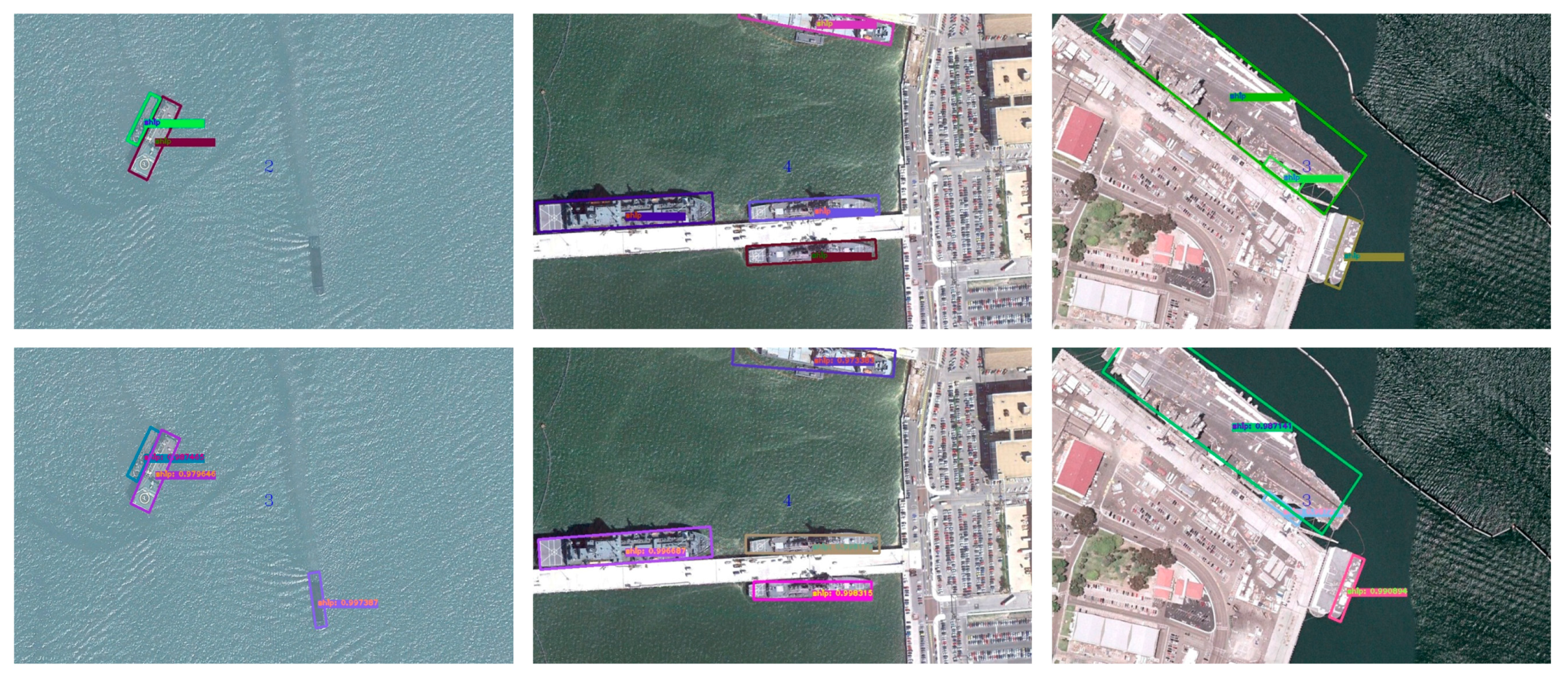
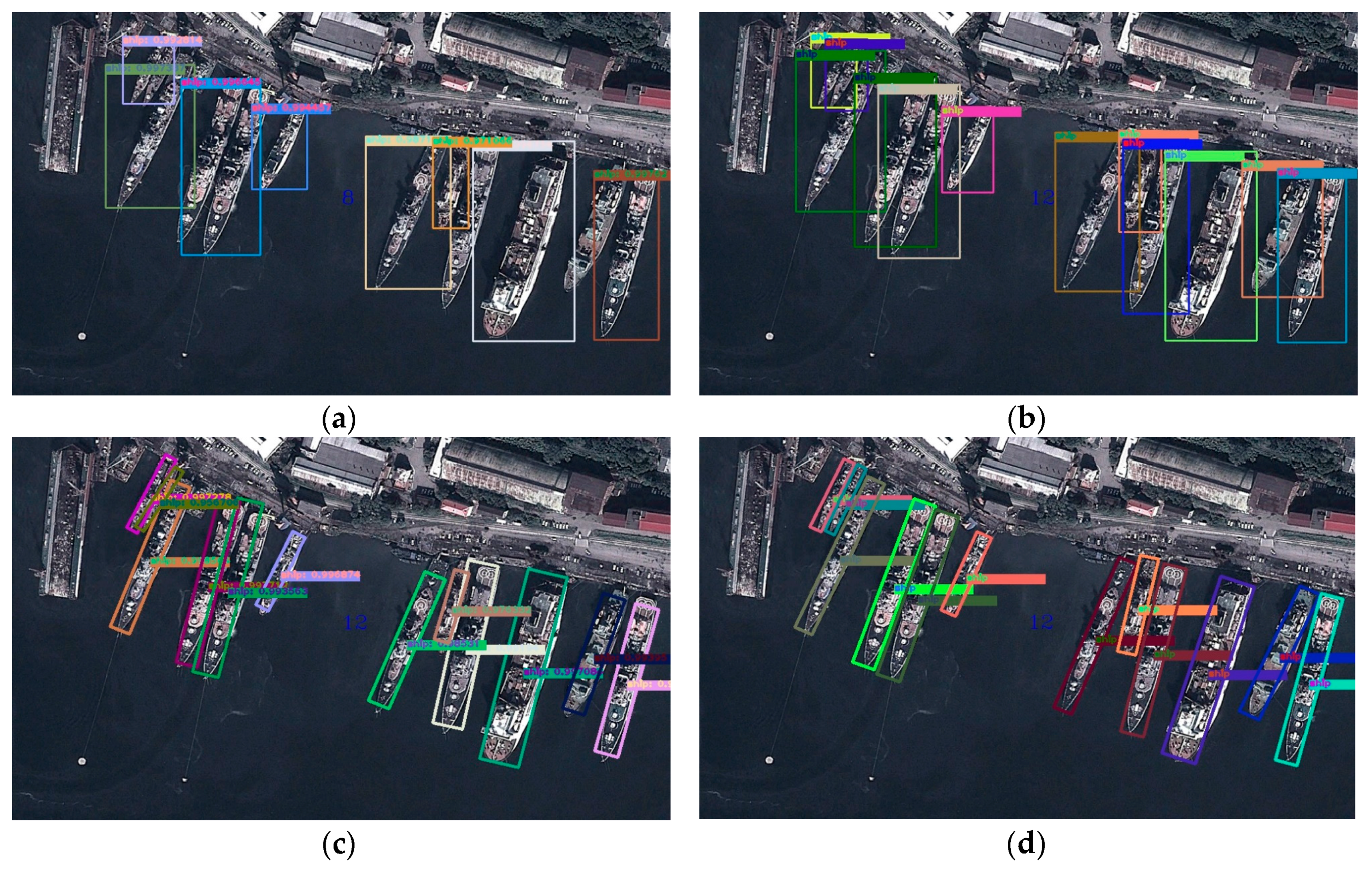
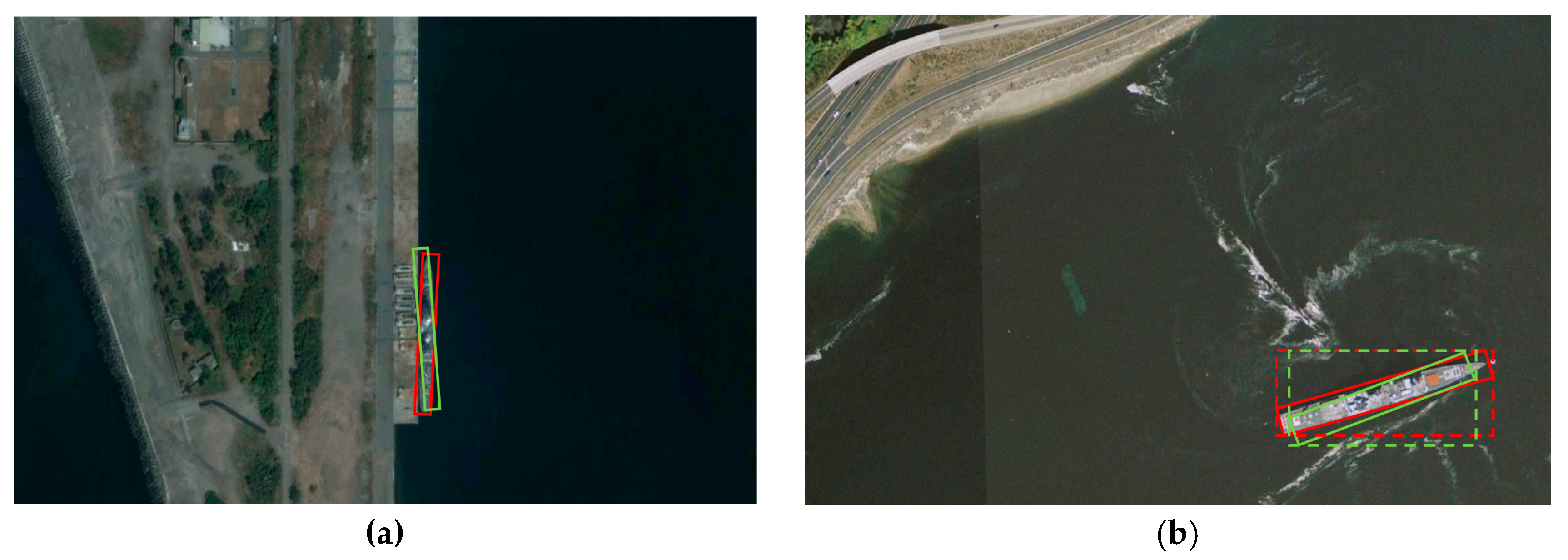
4. Discussion
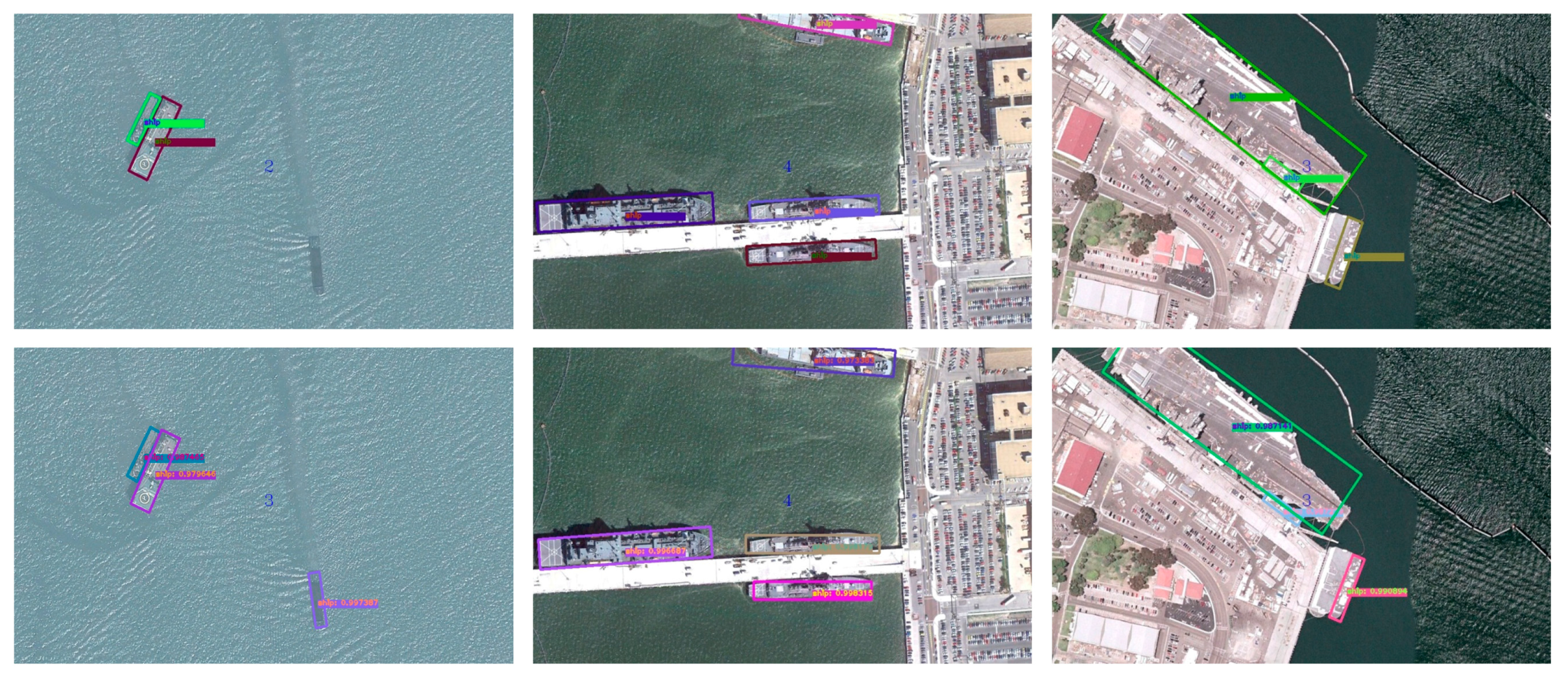
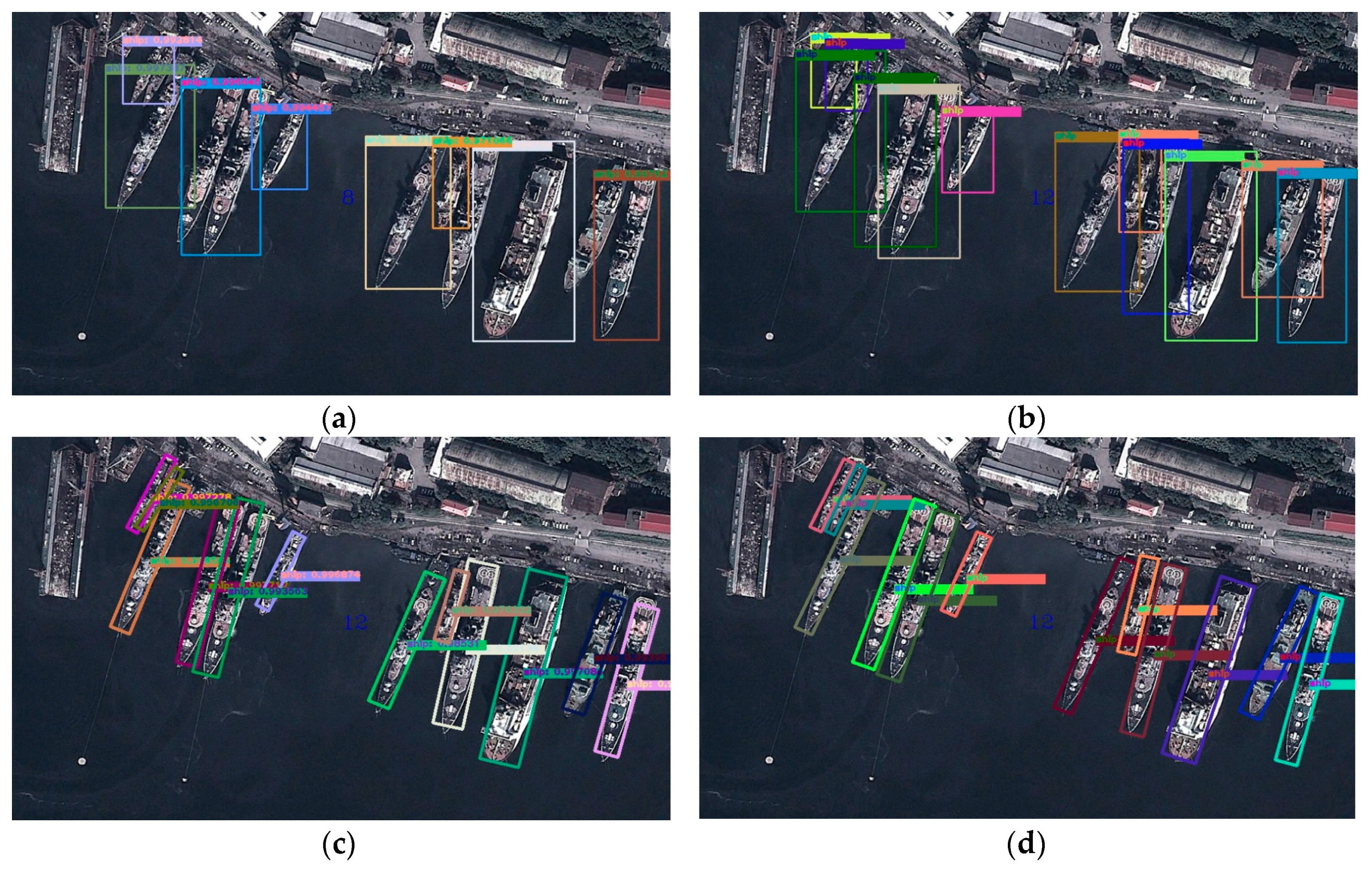
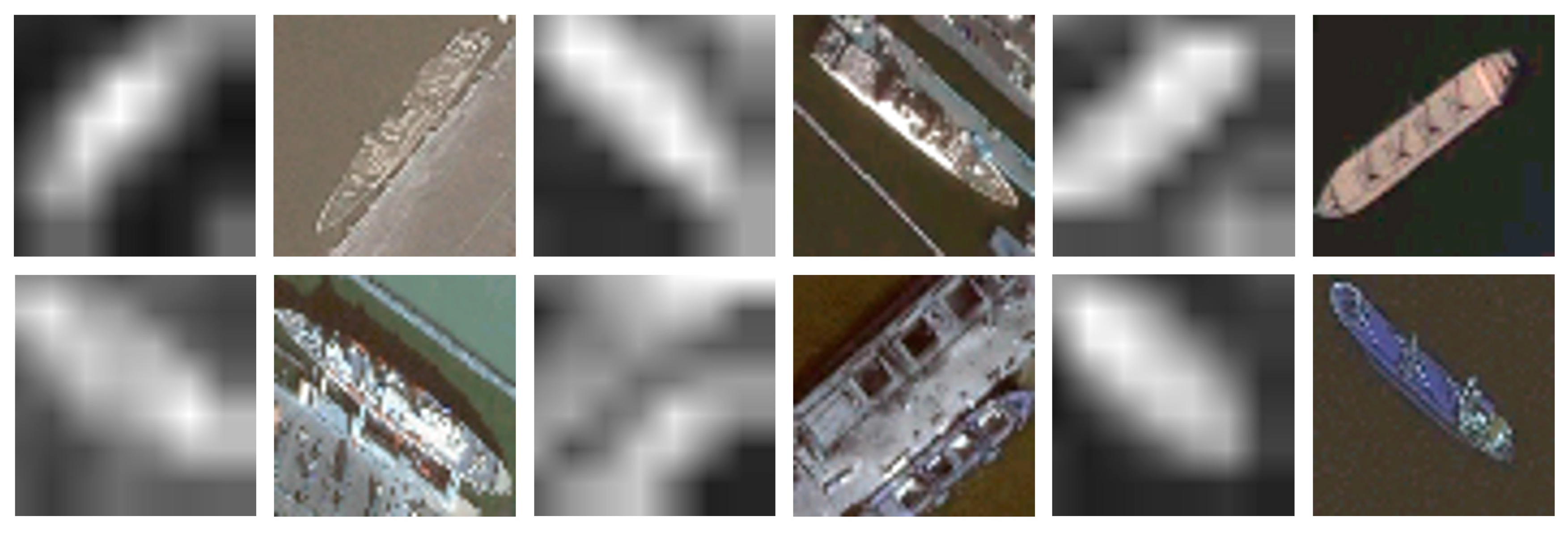
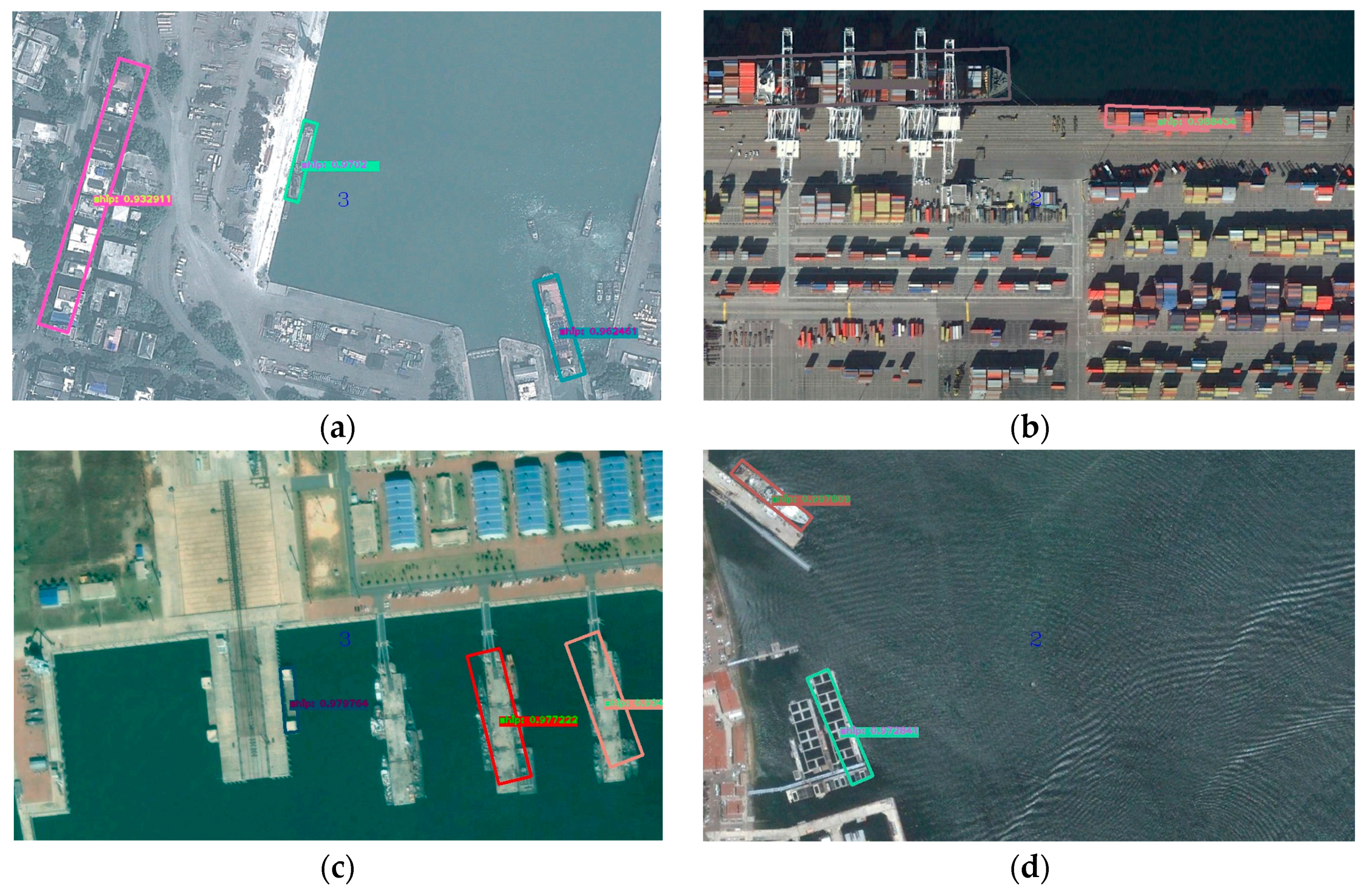
4.1. False Alarm
4.2. Misjudgment
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Crisp, D.J. A ship detection system for RADARSAT-2 dual-pol multi-look imagery implemented in the ADSS. In Proceedings of the 2013 IEEE International Conference on Radar, Adelaide, Australia, 9–12 September 2013; pp. 318–323. [Google Scholar]
- Crisp, D.J. The state-of-the-art in ship detection in Synthetic Aperture Radar imagery. Org. Lett. 2004, 35, 2165–2168. [Google Scholar]
- Wang, C.; Bi, F.; Zhang, W.; Chen, L. An Intensity-Space Domain CFAR Method for Ship Detection in HR SAR Images. IEEE Geosci. Remote Sens. Lett. 2017, 14, 529–533. [Google Scholar] [CrossRef]
- Fingas, M.F.; Brown, C.E. Review of Ship Detection from Airborne Platforms. Can. J. Remote Sens. 2001, 27, 379–385. [Google Scholar] [CrossRef]
- Leng, X.; Ji, K.; Zhou, S.; Zou, H. An adaptive ship detection scheme for spaceborne SAR imagery. Sensors 2016, 16, 1345. [Google Scholar] [CrossRef] [PubMed]
- Yu, Y.D.; Yang, X.B.; Xiao, S.J.; Lin, J.L. Automated Ship Detection from Optical Remote Sensing Images. Key Eng. Mater. 2012, 9, 749–753. [Google Scholar] [CrossRef]
- Zhu, C.; Zhou, H.; Wang, R.; Guo, J. A Novel Hierarchical Method of Ship Detection from Spaceborne Optical Image Based on Shape and Texture Features. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3446–3456. [Google Scholar] [CrossRef]
- Bi, F.; Zhu, B.; Gao, L.; Bian, M. A Visual Search Inspired Computational Model for Ship Detection in Optical Satellite Images. IEEE Geosci. Remote Sens. Lett. 2012, 9, 749–754. [Google Scholar]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the inception architecture for computer vision. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2016), Seattle, WA, USA, 27–30 June 2016; pp. 2818–2826. [Google Scholar]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2015), Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv, 2014; arXiv:1409.1556. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. In Proceedings of the Advances in Neural Information Processing Systems, Lake Tahoe, NV, USA, 3–6 December 2012; pp. 1097–1105. [Google Scholar]
- Ioffe, S.; Szegedy, C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. In Proceedings of the International Conference on Machine Learning, Lille, France, 6–11 July 2015; pp. 448–456. [Google Scholar]
- He, K.; Sun, J. Convolutional neural networks at constrained time cost. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2014), Columbus, OH, USA, 23–28 June 2014; pp. 5353–5360. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2014), Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef] [PubMed]
- Girshick, R. Fast R-CNN. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2015), Boston, MA, USA, 7–12 June 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2015), Boston, MA, USA, 7–12 June 2015; pp. 779–788. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Fu, C.; Berg, A.C. SSD: Single Shot Multibox Detector. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; pp. 21–37. [Google Scholar]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. arXiv, 2016; arXiv:1612.03144. [Google Scholar]
- Dai, J.; Li, Y.; He, K.; Sun, J. R-fcn: Object detection via region-based fully convolutional networks. arXiv, 2016; arXiv:1605.06409. [Google Scholar]
- Zhang, R.; Yao, J.; Zhang, K.; Feng, C.; Zhang, J. S-Cnn ship detection from high-resolution remote sensing images. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B7, 423–430. [Google Scholar] [CrossRef]
- Kang, M.; Leng, X.; Lin, Z.; Ji, K. A modified faster R-CNN based on CFAR algorithm for SAR ship detection. In Proceedings of the IEEE International Workshop on Remote Sensing with Intelligent, Shanghai, China, 18–21 May 2017; pp. 1–4. [Google Scholar]
- Liu, Y.; Zhang, M.H.; Xu, P.; Guo, Z.W. SAR ship detection using sea-land segmentation-based convolutional neural network. In Proceedings of the IEEE International Workshop on Remote Sensing with Intelligent, Shanghai, China, 18–21 May 2017; pp. 1–4. [Google Scholar]
- Jiang, Y.; Zhu, X.; Wang, X.; Yang, S.; Li, W.; Wang, H.; Fu, P.; Luo, Z. R2CNN: Rotational Region CNN for Orientation Robust Scene Text Detection. arXiv, 2017; arXiv:1706.09579. [Google Scholar]
- Ma, J.; Shao, W.; Ye, H.; Wang, L.; Wang, H.; Zheng, Y.; Xue, X. Arbitrary-Oriented Scene Text Detection via Rotation Proposals. arXiv, 2017; arXiv:1703.01086. [Google Scholar]
- Huang, G.; Liu, Z.; Weinberger, K.Q.; Laurens, V.D.M. Densely connected convolutional networks. arXiv, 2016; arXiv:1608.06993. [Google Scholar]
- Cai, Z.; Fan, Q.; Feris, R.S.; Vasconcelos, N. A unified multi-scale deep convolutional neural network for fast object detection. In Proceedings of the 14th European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; pp. 354–370. [Google Scholar]
- Zhu, C.; Zheng, Y.; Luu, K.; Savvides, M. CMS-RCNN: Contextual Multi-Scale Region-based CNN for Unconstrained Face Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2016), Seattle, WA, USA, 27–30 June 2016. [Google Scholar]
- Kang, M.; Ji, K.; Leng, X.; Lin, Z. Contextual Region-Based Convolutional Neural Network with Multilayer Fusion for SAR Ship Detection. Remote Sens. 2017, 9, 860. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; pp. 770–778. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Detection Method | Dense Feature Pyramid | Rotation Anchor | ROI Align | Pool Size | R (%) | P (%) | F (%) |
|---|---|---|---|---|---|---|---|
| Faster | × | × | × | 7 × 7 | 62.7 | 96.6 | 76.0 |
| FPN | × | × | × | 7 × 7 | 75.5 | 97.7 | 85.2 |
| RRPN | × | √ | × | 7 × 7 | 68.8 | 71.1 | 69.9 |
| R2CNN | × | × | × | 7 × 7, 16 × 3, 3 × 16 | 80.8 | 88.7 | 84.6 |
| R-DFPN-1 | × | √ | × | 7 × 7 | 82.6 | 86.6 | 84.5 |
| R-DFPN-2 | √ | √ | × | 7 × 7 | 84.7 | 88.8 | 86.7 |
| R-DFPN-3 | √ | √ | × | 7 × 7, 16 × 3, 3 × 16 | 85.7 | 88.1 | 86.9 |
| R-DFPN-4 | √ | √ | √ | 7 × 7, 16 × 3, 3 × 16 | 88.2 | 91.0 | 89.6 |
| Method | Faster | FPN | RRPN | R2CNN | R-DFPN-1 | R-DFPN-2 | R-DFPN-3 | R-DFPN-4 |
|---|---|---|---|---|---|---|---|---|
| Train | 0.34 s | 0.5 s | 0.85 s | 0.5 s | 0.78 s | 0.78 s | 1.15 s | 1.15 s |
| Test | 0.1 s | 0.17 s | 0.35 s | 0.17 s | 0.3 s | 0.3 s | 0.38 s | 0.38 s |
| Detection Method | R (%) | P (%) | F (%) |
|---|---|---|---|
| Faster | 62.7 | 96.6 | 76.0 |
| FPN | 75.5 | 97.7 | 85.2 |
| RRPN | 73.4 | 75.1 | 74.2 |
| R2CNN | 84.2 | 90.8 | 87.4 |
| R-DFPN | 90.5 | 94.1 | 92.3 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Sun, H.; Fu, K.; Yang, J.; Sun, X.; Yan, M.; Guo, Z. Automatic Ship Detection in Remote Sensing Images from Google Earth of Complex Scenes Based on Multiscale Rotation Dense Feature Pyramid Networks. Remote Sens. 2018, 10, 132. https://doi.org/10.3390/rs10010132
Yang X, Sun H, Fu K, Yang J, Sun X, Yan M, Guo Z. Automatic Ship Detection in Remote Sensing Images from Google Earth of Complex Scenes Based on Multiscale Rotation Dense Feature Pyramid Networks. Remote Sensing. 2018; 10(1):132. https://doi.org/10.3390/rs10010132
Chicago/Turabian StyleYang, Xue, Hao Sun, Kun Fu, Jirui Yang, Xian Sun, Menglong Yan, and Zhi Guo. 2018. "Automatic Ship Detection in Remote Sensing Images from Google Earth of Complex Scenes Based on Multiscale Rotation Dense Feature Pyramid Networks" Remote Sensing 10, no. 1: 132. https://doi.org/10.3390/rs10010132
APA StyleYang, X., Sun, H., Fu, K., Yang, J., Sun, X., Yan, M., & Guo, Z. (2018). Automatic Ship Detection in Remote Sensing Images from Google Earth of Complex Scenes Based on Multiscale Rotation Dense Feature Pyramid Networks. Remote Sensing, 10(1), 132. https://doi.org/10.3390/rs10010132