Impact of the Elevation Angle on CYGNSS GNSS-R Bistatic Reflectivity as a Function of Effective Surface Roughness over Land Surfaces


Abstract
:
1. Introduction
2. GNSS-R Approaches for Studies over Land Surfaces
3. Coherent and Incoherent Scattering in GNSS-R
4. Data and Methods
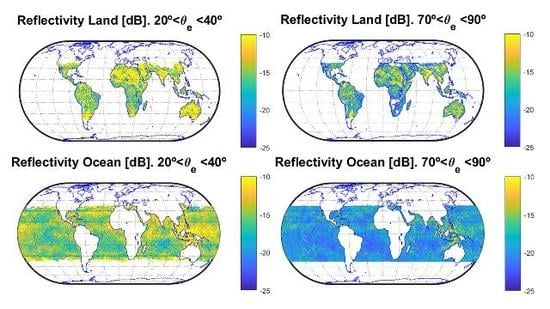
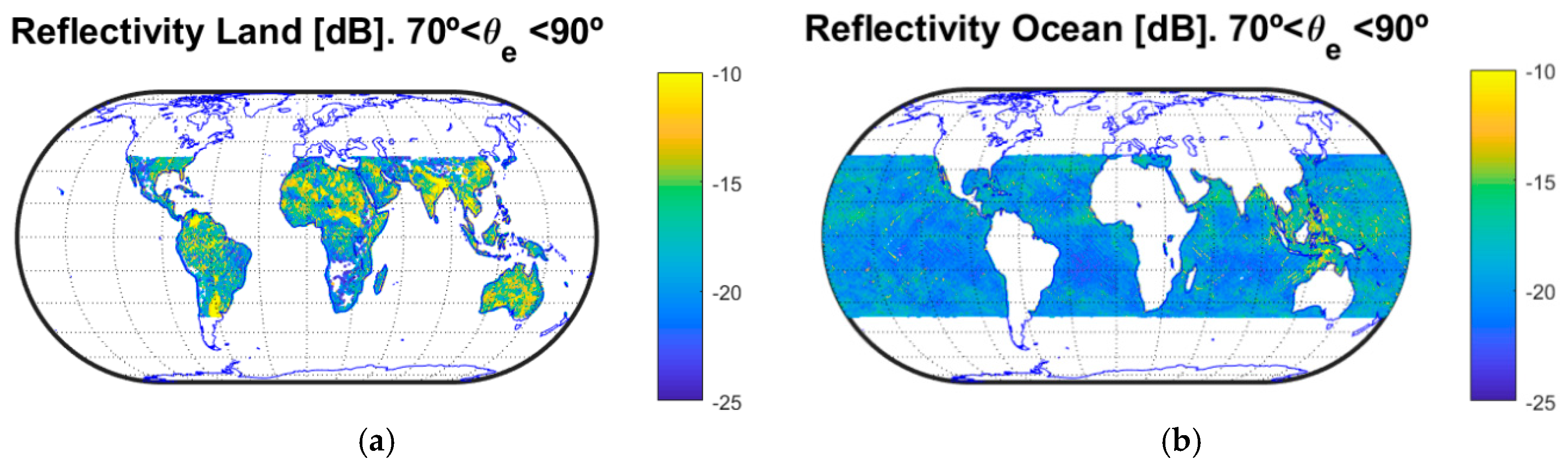
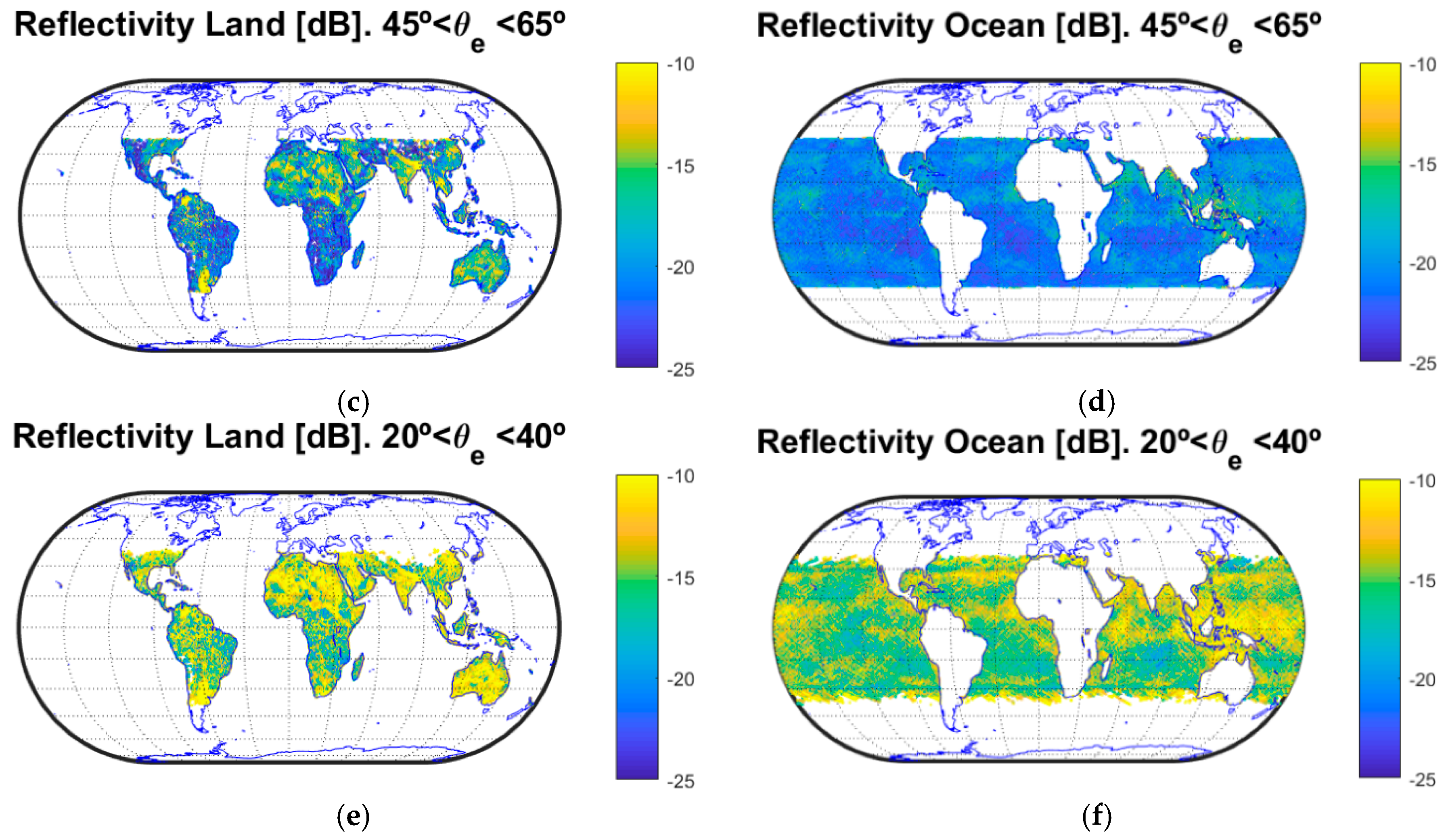
5. Global Scale Reflectivity over Land and Ocean
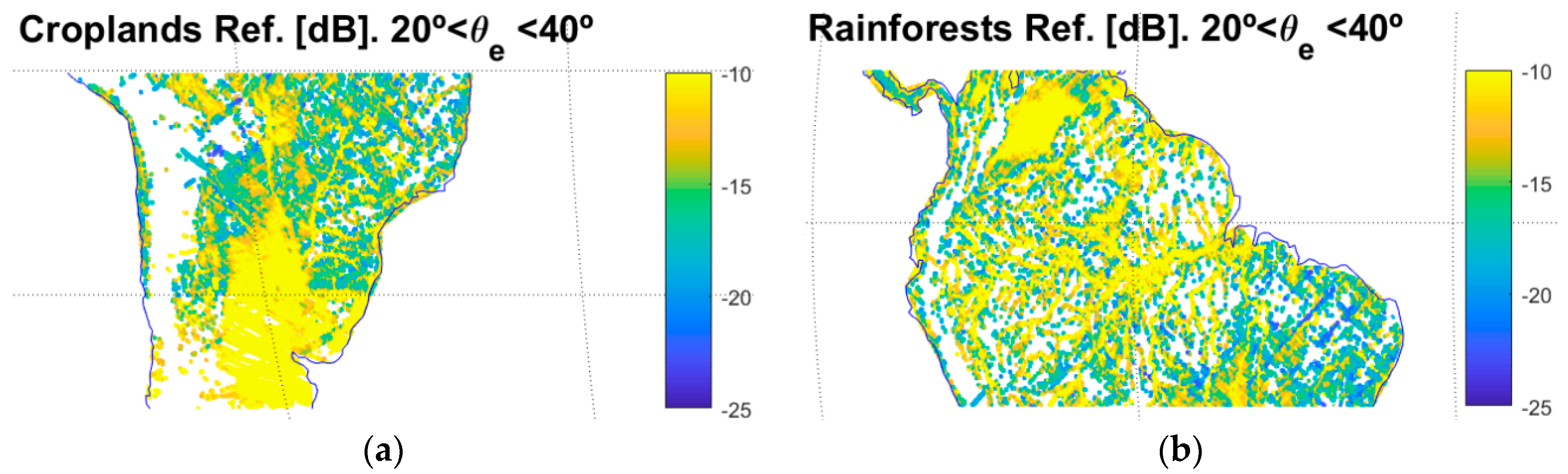
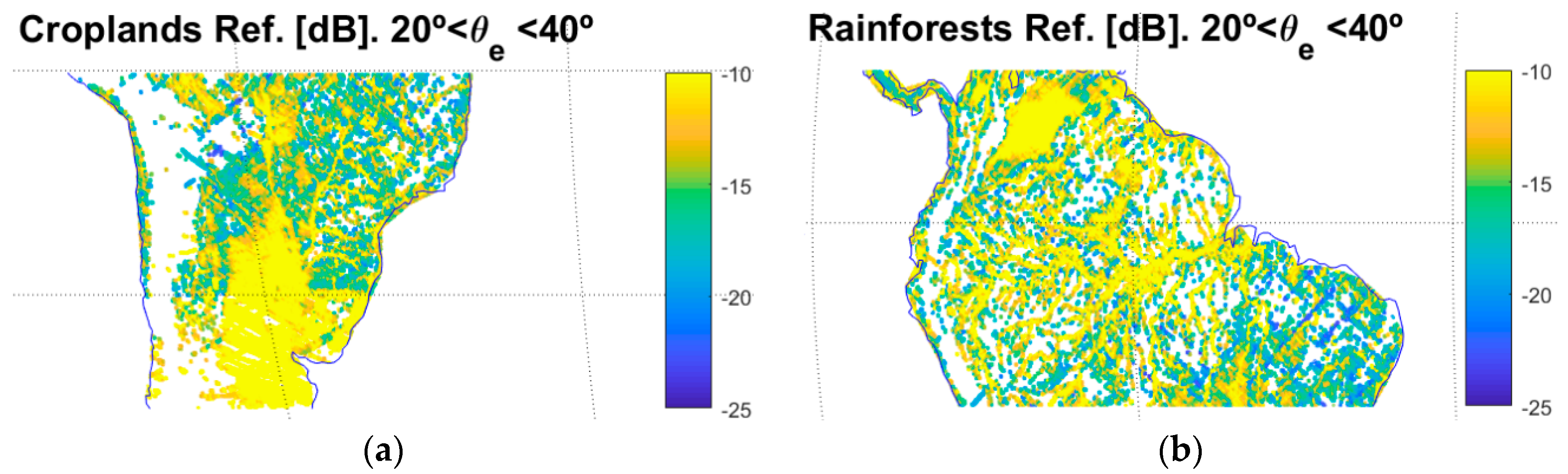
- a)
- Croplands (target area at Lat = [−37,30]°, Lon = [−65,−60]°): This target area was sparsely vegetated and the surface roughness levels were relatively homogeneous due to agricultural activities. The mean increased by ≈4.2 dB from ≈ [70,90]° to ≈ [20,40]° as an indication of a higher signal coherence for lower (Figure 3a). This gradient could be only attributed to angular changes on the surface scattering mechanisms because the signal attenuation through the vegetation could be assumed to be negligible in this target area.
- b)
- Amazonian rainforests (target area at Lat = [−8,1]°, Lon = [−75, −65]°): This target area was characterized by wet biomass with high AGB ≈ 350 tons/ha that strongly attenuated GNSS signals, so that the remaining reflected power could be interpreted as a noise power floor in (areas in “white” in Figure 3b correspond to SNR lower than 3 dB). However, the increment due to the coherent scattering over soil and inland water bodies compensated this attenuation, and as a consequence, the mean increased by ≈3.4 dB for decreasing , allowing for the detection of the hydrosphere, even at grazing angles (Figure 3b).
6. Results on the Surface Roughness and the Soil Moisture Effect
6.1. Global Analysis
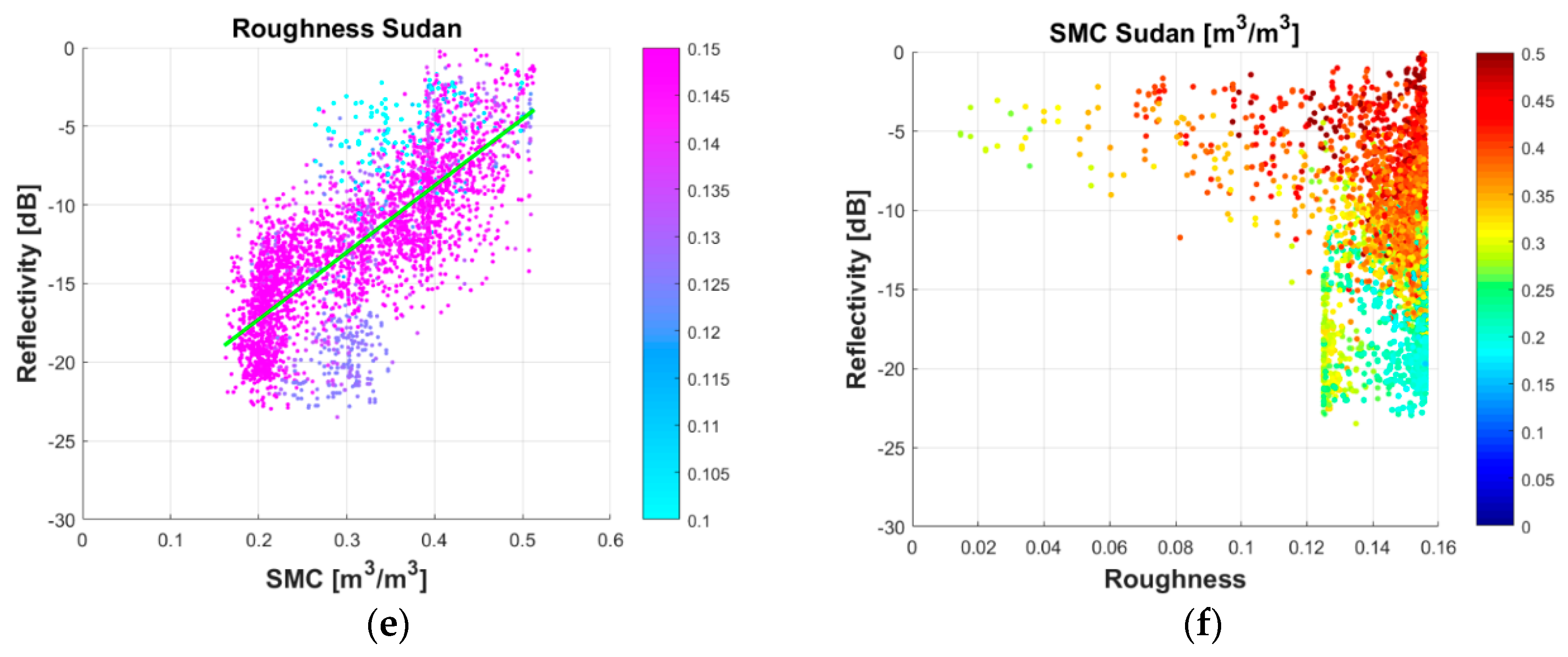
6.2. Regional Case Studies
7. Final Discussions
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Poghosyan, A.; Golkar, A. CubeSat evolution: Analyzing CubeSat capabilities for conducting science missions. Elsevier Prog. Aerosp. Sci. 2017, 88, 59–83. [Google Scholar] [CrossRef]
- Gleason, S.; Hodgart, S.; Sun, Y.; Gommenginger, C.; Mackin, S.; Adjrad, M.; Unwin, M. Detection and processing of bistatically reflected GPS signals from low Earth orbit for the purpose of ocean remote sensing. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1229–1241. [Google Scholar] [CrossRef]
- Unwin, M.; Jales, P.; Blunt, P.; Duncan, S. Preparation for the first flight of SSTL’s next generation space GNSS receivers. In Proceedings of the 6th ESA/European Workshop Satellite NAVITEC GNSS Signals Signal Processing, Noordwijk, The Netherlands, 5–7 December 2012; pp. 1–6. [Google Scholar]
- Carreno-Luengo, H.; Camps, A.; Via, P.; Munoz, J.F.; Cortiella, A.; Vidal, D.; Jané, J.; Catarino, N.; Hagenfeldt, M.; Palomo, P.; et al. 3Cat-2—An experimental nanosatellite for GNSS-R earth observation: Mission concept and analysis. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4540–4551. [Google Scholar] [CrossRef]
- Lowe, S.T.; LaBrecque, J.L.; Zuffada, C.; Romans, L.J.; Young, L.E.; Hajj, G.A. First spaceborne observation of an Earth-reflected GPS signal. Radio Sci. 2002, 37, 1–28. [Google Scholar] [CrossRef]
- Martín-Neira, M.; Li, W.; Andrés-Beivide, A.; Ballesteros-Sels, X. Cookie: A satellite concept for GNSS remote sensing constellations. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4593–4610. [Google Scholar] [CrossRef]
- Cardellach, E.; Wickert, J.; Baggen, R.; Benito, J.; Camps, A.; Catarino, N.; Chapron, B.; Dielacher, A.; Fabra, F.; Flato, G.; et al. GNSS Transpolar Earth Reflectometry exploring System (G-TERN): Mission concept. IEEE Trans. Geosci. Remote Sens. 2018, 6, 13980–14018. [Google Scholar] [CrossRef]
- Martín-Neira, M.; D’Addio, S.; Buck, C.; Floury, M.; Prieto-Cerdeira, R. The PARIS ocean altimeter in-orbit demonstrator. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2209–2237. [Google Scholar] [CrossRef]
- Garrison, J.L.; Komjathy, A.; Zavorotny, V.U.; Katzberg, S.J. Wind speed measurement using forward scattered GPS signals. IEEE Trans. Geosci. Remote Sens. 2002, 40, 50–65. [Google Scholar] [CrossRef] [Green Version]
- Zavorotny, V.U.; Larson, K.M.; Braun, J.J.; Small, E.E.; Gutmann, E.D.; Bilich, A.L. A physical model for GPS multipath caused by land reflections: Toward bare soil moisture retrievals. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2009, 3, 100–110. [Google Scholar] [CrossRef]
- Larson, K.M.; Small, E.E.; Gutmann, E.; Bilich, A.; Axelrad, P.; Braun, J. Using GPS multipath to measure soil moisture fluctuations: Initial results. GPS Solut. 2008, 12, 173–177. [Google Scholar] [CrossRef]
- Ruf, C.; Unwin, M.; Dickinson, J.; Rose, R.; Rose, D.; Vincent, M.; Lyons, A. CYGNSS: Enabling the future of hurricane prediction [Remote Sensing Satellites]. IEEE Geosci. Remote Sens. Mag. 2016, 1, 52–67. [Google Scholar] [CrossRef]
- Ruf, C.; Atlas, R.; Chang, P.; Clarizia, M.; Garrison, J.; Gleason, S.; Katzberg, S.; Jelenak, Z.; Johnson, J.; Majumdar, S.; et al. New ocean winds satellite mission to probe hurricanes and tropical convection. Bull. Am. Meteorol. Soc. 2015, 97, 385–395. [Google Scholar] [CrossRef]
- Bussy-Virat, C.D.; Ruf, C.S.; Ridley, A.J. Relationship between temporal and spatial resolution for a constellation of GNSS-R satellites. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018. [Google Scholar] [CrossRef]
- Egido, A.; Paloscia, S.; Motte, E.; Guerriero, L.; Pierdicca, N.; Vaparrini, M.; Santi, E.; Fontanelli, G.; Floury, N. Airborne GNSS-R polarimetric measurements for soil moisture and above ground biomass estimation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 1522–1532. [Google Scholar] [CrossRef]
- Carreno-Luengo, H.; Lowe, S.T.; Zuffada, C.; Esterhuizen, S.; Oveisgharan, S. Spaceborne GNSS-R from the SMAP mission: First assessment of polarimetric scatterometry over land and cryosphere. Remote Sens. 2017, 9, 362. [Google Scholar] [CrossRef]
- Chew, C.; Small, E.E. Soil moisture sensing using spaceborne GNSS reflections: Comparison of CYGNSS reflectivity to SMAP soil moisture. Geophys. Res. Lett. 2018, 45, 4049–4057. [Google Scholar] [CrossRef]
- Wang, S.G.; Li, X.; Han, X.J.; Jin, R. Estimation of surface soil moisture and roughness from multi-angular ASAR imagery in the Watershed Allied Telemetry Experimental Research (WATER). Hydrol. Earth Syst. Sci. 2011, 15, 1415–1426. [Google Scholar] [CrossRef] [Green Version]
- Shi, J.; Wang, J.; Hsu, A.Y.; O’Neill, P.E.; Engman, E. Estimation of bare surface soil moisture and surface roughness parameter using L-band SAR image SAR. IEEE Trans. Geosci. Remote Sens. 1997, 35, 1254–1266. [Google Scholar]
- Pierdicca, N.; Pulvirenti, L.; Ticconi, F.; Brogioni, M. Radar bistatic configurations for soil moisture retrieval: a simulation study. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3252–3264. [Google Scholar] [CrossRef]
- Paloscia, S.; Pampaloni, P.; Chiaranti, L.; Coppo, P.; Gagliani, S.; Luzi, G. Multifrequency passive microwave remote sensing of soil moisture and roughness. Int. J. Remote Sens. 1991, 14, 467–483. [Google Scholar] [CrossRef]
- Piles, M.; Camps, A.; Vall-llosera, M.; Monerris, A.; Talone, M.; Sabater, J.M. Performance of soil moisture retrieval algorithms using multiangular L band brightness temperatures. Water Resour. Res. 2010, 46, 1–9. [Google Scholar] [CrossRef]
- Pierdicca, N.; Guerriero, L.; Brogioni, M.; Egido, A. On the coherent and non- coherent components of bare and vegetated terrain bistatic scattering: Modelling the GNSS-R signal over land. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 3407–3410. [Google Scholar]
- Martín, F.; Camps, A.; Martín-Neira, M.; D’Addio, S.; Fabra, F.; Rius, A.; Park, H. Impact of the elevation angle in the coherence time as a function of the sea wave height. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Milan, Italy, 26–31 July 2015; pp. 3630–3633. [Google Scholar]
- CYGNSS. CYGNSS Level 1 Science Data Record Version 2.0. 2017. PO.DAAC, CA, USA. Available online: http://dx.doi.org/10.5067/CYGNS-L1X20 (accessed on 3 May 2018).
- Masters, D.; Zavorotny, V.U.; Katzsberg, S.; Emery, W. GPS signal scattering from land for moisture content determination. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 24–28 July 2000; pp. 3090–3092. [Google Scholar]
- Egido, A.; Martín-Puig, C.; Felip, D.; Garcia, M.; Caparrini, M.; Farrés, E.; Ruffini, G. The SAM sensor: An innovative GNSS-R system for soil moisture retrieval. In Proceedings of the NAVITEC Conference, European Space and Technology Centre in Noordwijk, Noordwijk, The Netherlands, 10–12 April 2008. [Google Scholar]
- Katzberg, S.J.; Torres, O.; Grant, M.S.; Masters, D. Utilizing calibrated GPS reflected signals to estimate soil reflectivity and dielectric constant: Results from SMEX02. Remote Sens. Environ. 2006, 100, 17–28. [Google Scholar] [CrossRef] [Green Version]
- Pierdicca, N.; Guerriero, L.; Giusto, R.; Brogioni, M.; Egido, A. SAVERS: A Simulator of GNSS Reflections from Bare and Vegetated Soils. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6542–6554. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Bosch-Lluis, X.; Camps, A.; Vall-llosera, M.; Valencia, E.; Marchan-Hernadez, J.F.; Ramos-Perez, I. Soil moisture retrieval using GNSS-R techniques: Experimental results over a bare soil feld. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3616–3624. [Google Scholar] [CrossRef]
- Alonso-Arroyo, A.; Camps, A.; Aguasca, A.; Forte, G.; Moneris, A.; Rudiger, C.; Walker, J.P.; Park, H.; Pacual, D.; Onrubia, R. Dual-Polarization GNSS-R Interference Pattern Technique for Soil Moisture Mapping. IEEE Trans. Geosci. Remote Sens. 2014, 7, 1533–1544. [Google Scholar] [CrossRef]
- Carreno-Luengo, H.; Camps, A.; Querol, J.; Forte, G. First results of a GNSS-R experiment from a stratospheric balloon over boreal forests. IEEE Trans. Geosci. Remote Sens. 2015, 54, 2652–2663. [Google Scholar] [CrossRef]
- Motte, E.; Zribi, M.; Fanise, P.; Egido, A.; Darrozes, J.; Al-Yaari, A.; Baghdadi, N.; Baup, F.; Dayau, S.; Fieuzal, R.; et al. GLORI: A GNSS-R dual polarization airborne instrument for land surface monitoring. Sensors 2016, 16, 732. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Small, E.E.; Kristine, M.L.; Chew, C.C.; Dong, J.; Ochsner, T.E. Validation of GPS-IR soil moisture retrievals: Comparison of different algorithms to remove vegetation effects. IEEE Trans. Geosci. Remote Sens. 2016, 9, 4759–4770. [Google Scholar] [CrossRef]
- Camps, A.; Hyuk, H.; Pablos, M.; Foti, G.; Gommerginger, C.P.; Liu, P.W.; Judge, J. Sensitivity of GNSS-R spaceborne observations to soil moisture and vegetation. IEEE Trans. Geosci. Remote Sens. 2016, 9, 4730–4732. [Google Scholar] [CrossRef]
- Chew, C.; Shah, R.; Zuffada, Z.; Hajj, G.; Masters, D.; Mannucci, A.J. Demonstrating soil moisture remote sensing with observations from the UK TechDemoSat-1 satellite mission. Geophys. Res. Lett. 2016, 43, 3317–3324. [Google Scholar] [CrossRef]
- Piles, M.; Entekhabi, D.; Konings, A.G.; McColl, K.A.; Das, N.N.; Jagdhuber, T. Multi-temporal microwave retrievals of soil moisture and vegetation parameters from SMAP. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Beijing, China, 10–15 July 2016; pp. 242–245. [Google Scholar]
- Pierdicca, N.; Mollfulleda, A.; Martín, F.; Guerriero, L.; Paloscia, S.; Santi, E.; Floury, N. GNSS signal under forests for biomass retrieval: Experimental results and models. In Proceedings of the Specialist Meeting on Reflectometry Using GNSS and other Signals of Opportunity, University of Michigan, Ann Arbor, MI, USA, 23–25 May 2017; Available online: http://www.gnssr2017.org/workshop-program.html (accessed on 2 May 2018).
- Peake, W.H. Interaction of electromagnetic waves with some natural surfaces. IEEE Trans. Antennas Propag. 1959, 7, 324–329. [Google Scholar] [CrossRef]
- Tsang, L.; Newton, R.W. Microwave emissions from soils with rough surfaces. J. Geophys. Res. 1982, 87, 9017–9024. [Google Scholar] [CrossRef]
- Zribi, M.; Baghdadi, N.; Guérin, C. Analysis of surface roughness heterogeneity and scattering behavior for radar measurements. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2438–2444. [Google Scholar] [CrossRef]
- Voronovich, A.G.; Zavorotny, V.U. Bistatic radar equation for signals of opportunity revisited. IEEE Trans. Geosci. Remote Sens. 2017, 56, 1959–1968. [Google Scholar] [CrossRef]
- Carreno-Luengo, H.; Luzi, G.; Crosetto, M. Sensitivity of CyGNSS bistatic reflectivity and SMAP microwave brightness temperature to geophysical parameters over land surfaces. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018. [Google Scholar] [CrossRef]
- Wang, J.R.; Schmugge, T.J. An empirical model for the complex dielectric permittivity of soils as a function of water content. IEEE Trans. Geosci. Remote Sens. 1980, 4, 288–295. [Google Scholar] [CrossRef]
- Park, H.; Camps, A.; Pascual, D.; Alonso-Arroyo, A.; Querol, J.; Onrubia, R. Improvement of PAU/PARIS end-to-end performance simulator (P2PEPS): Land scattering including topography. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Beijing, China, 10–15 July 2016; pp. 5607–5610. [Google Scholar]
- O’Neill, P.E.; Chan, S.; Njoku, E.G.; Jackson, T.; Bindlish, R. SMAP Enhanced L3 Radiometer Global Daily 9 km EASE-Grid Soil Moisture, Version 1; [SPL3SMP_E]; NASA National Snow Ice Data Center Distributed Active Archive Center: Boulder, CO, USA, 2016. [CrossRef]
- Entekhabi, D.; Yueh, S.; O’Neill, P.E.; Kellogg, K.H.; Allen, A.; Bindlish, R.; Brown, M.; Chan, S.; Colliander, A.; Crow, W.; et al. SMAP Handbook. Soil Moisture Active Passive. Available online: https://nsidc.org/data/SPL3SMP_E/versions/1 (accessed on 6 April 2018).
- O’Neill, P.E.; Chan, S.; Njoku, E.; Jackson, T.; Bindlish, R. Soil Moisture Active Passive (SMAP) Algorithm Theoretical Basis Document Level 2 & 3 Soil Moisture (Passive) Data Products. Revision C. December 2016. Available online: https://nsidc.org/data/SPL3SMP_E/versions/1 (accessed on 16 April 2018).
- Koike, T.; Nakamura, Y.; Kaihotsu, I.; Davaa, G.; Matsuura, N.; Tamagawa, K.; Fujii, H. Development of an Advanced Microwave Scanning Radiometer (AMSR-E) algorithm of soil moisture and vegetation water content. Ann. J. Hydraul. Eng. Jpn. Soc. Civ. Eng. 2004, 48, 217–222. [Google Scholar] [CrossRef]
- Hornbuckle, B.; Walker, V.; Eichinger, B.; Wallace, V.; Yildirim, E. Soil surface roughness observed during SMAPVEX16–IA and its potential consequences for SMOS and SMAP. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium, Fort Worth, TX, USA, 23–28 July 2017; pp. 2017–2030. [Google Scholar]
- Semmling, A.M.; Beckheinrich, J.; Wickert, J.; Beyerle, G.; Schön, S.; Fabra, F.; Pflug, H.; He, K.; Schwabe, J.; Scheinert, M. Sea surface topography retrieved from GNSS reflectometry phase data of the GEOHALO flight mission. Geophys. Res. Lett. 2014, 41, 954–960. [Google Scholar] [CrossRef] [Green Version]
- Martín, F.; Camps, A.; Park, H.; D’Addio, S.; Martín-Neira, M.; Pascual, D. Cross-correlation waveform analysis for conventional and interferometric GNSS-R approaches. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 1560–1572. [Google Scholar] [CrossRef]
- Li, W.; Cardellach, E.; Fabra, F.; Rius, A.; Ribó, S.; Martín-Neira, M. First spaceborne phase altimetry over sea ice using TechDemoSat-1 GNSS-R signals. Geophys. Res. Lett. 2017, 44, 8369–8376. [Google Scholar] [CrossRef]
- Alonso-Arroyo, A.; Camps, A.; Zavorotny, V. Sea ice detection using U.K. TDS-1 GNSS-R data. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4989–5001. [Google Scholar] [CrossRef]
- Jackson, T.J.; McNairn, H.; Weltz, M.A.; Brisco, B.; Brown, R. First order surface roughness correction of active microwave observations for estimating soil moisture. IEEE Trans. Geosci. Remote Sens. 1997, 35, 1065–1069. [Google Scholar] [CrossRef]
- Høeg, P.; Fragner, H.; Dielacher, A.; Zangerl, F.; Koudelka, O.; Beck, P.; Wickert, J. PRETTY: Grazing altimetry measurements based on the interferometric method. In Proceedings of the 5th Workshop on Advanced RF Sensors and Remote Sensing Instruments, ARSI’17, ESA-ESTEC, Noordwijk, The Netherlands, 12–14 September 2017. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| [dB] | |||
|---|---|---|---|
| Land | −12.1 | −17.7 | −15.8 |
| Ocean | −14.1 | −20.3 | −19.4 |
| Pampas | India | Sudan | |
|---|---|---|---|
| [80,90]° | 0.73 | 0.62 | 0.68 |
| [70,80]° | 0.77 | 0.68 | 0.69 |
| [60,70]° | 0.78 | 0.71 | 0.68 |
| [50,60]° | 0.76 | 0.72 | 0.65 |
| [40,50]° | 0.71 | 0.72 | 0.68 |
| [30,40]° | 0.60 | 0.70 | 0.74 |
| [20,30]° | 0.36 | 0.62 | 0.67 |
| Semi-Minor Axes [m] | Semi-Major Axes [m] | |
|---|---|---|
| 90° | 311 | 311 |
| 80° | 313 | 317 |
| 70° | 321 | 341 |
| 60° | 334 | 385 |
| 50° | 355 | 463 |
| 40° | 388 | 603 |
| 30° | 440 | 880 |
| 20° | 532 | 1555 |
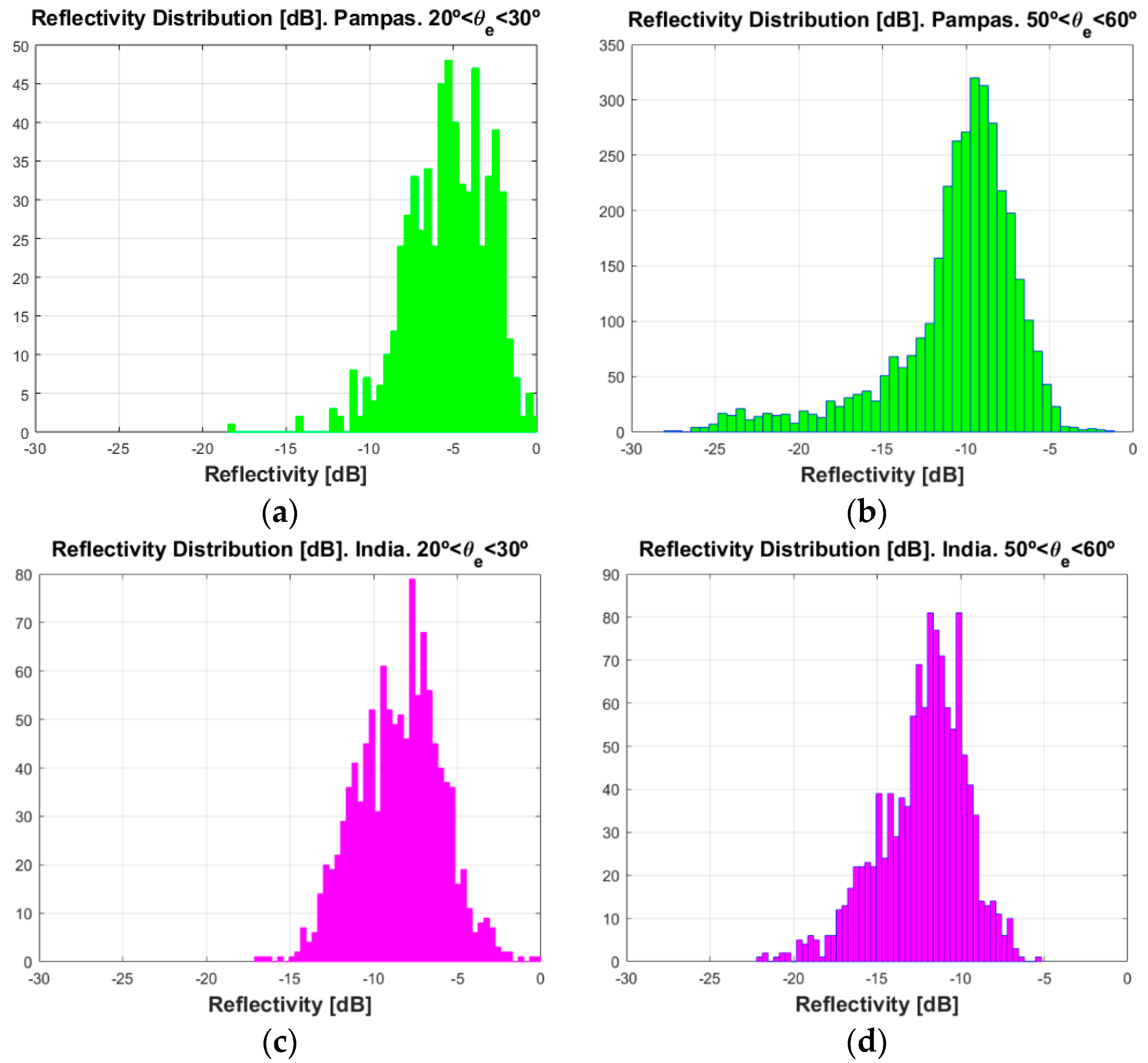
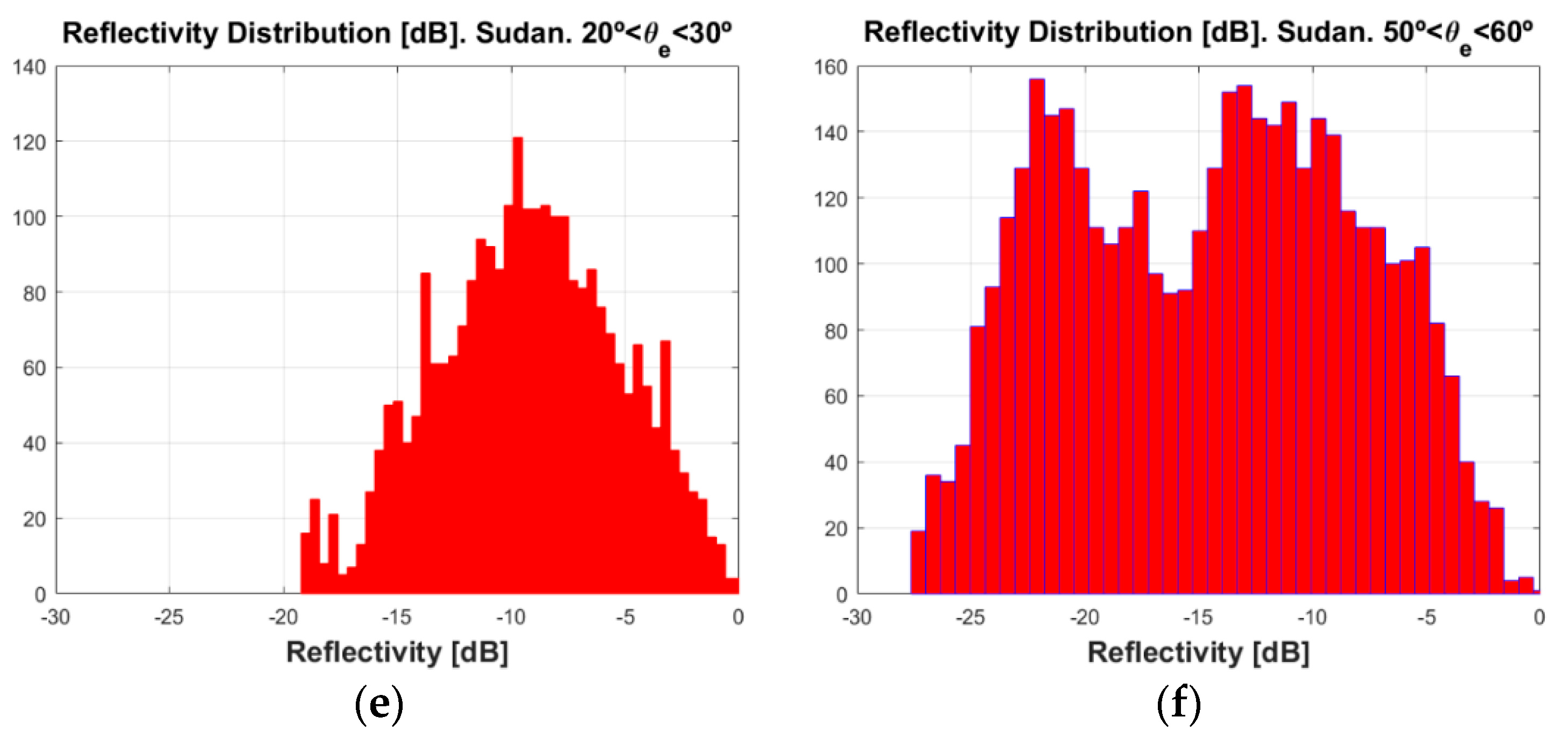
| Pampas | India | Sudan | |
|---|---|---|---|
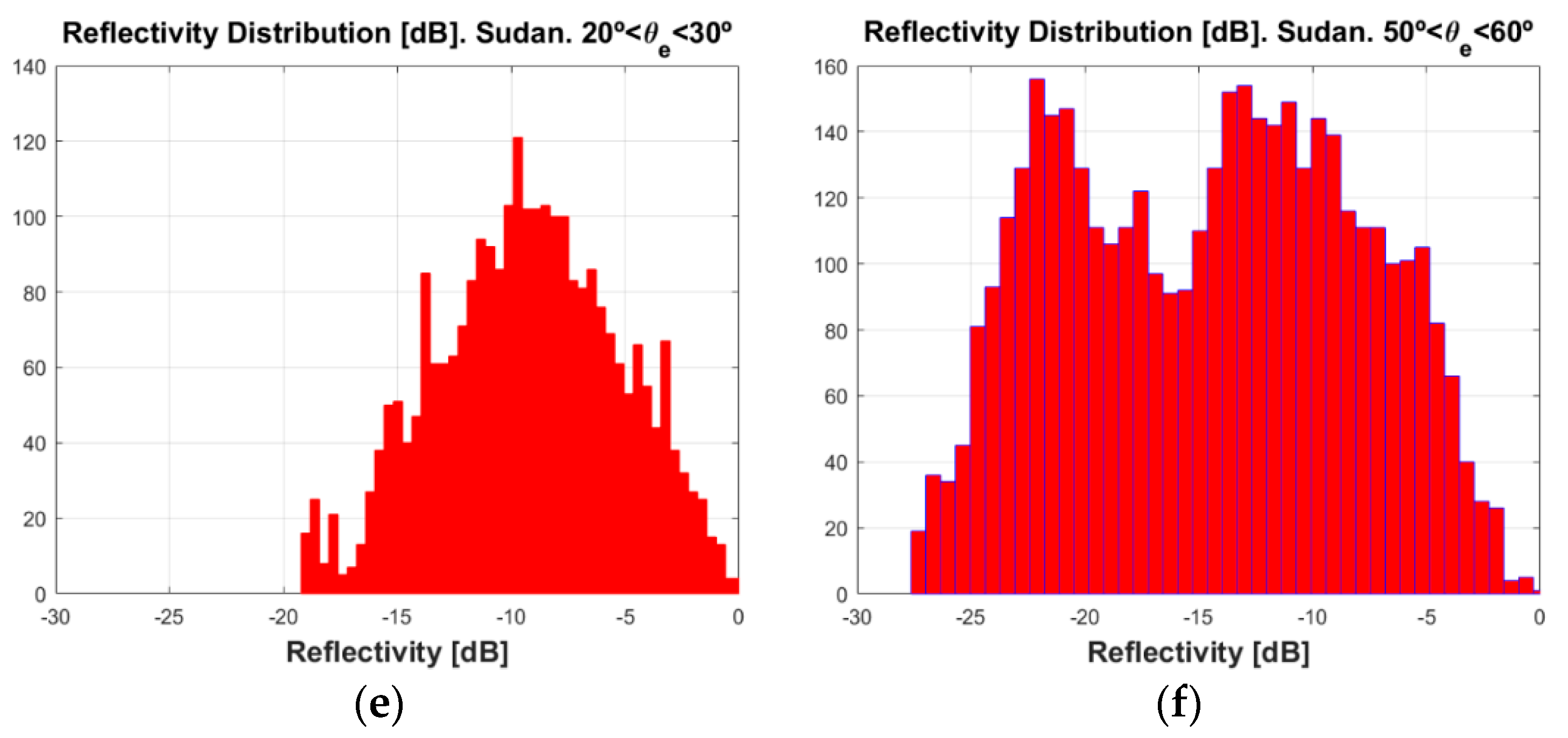
| Mean [dB]; = [50,60]° | −10.6 | −12.2 | −14.5 |
| Mean [dB]; = [20,30]° | −5.2 | −8.4 | −9.2 |
| SD [dB]; = [50,60]° | 3.9 | 2.5 | 6.4 |
| SD [dB]; = [20,30]° | 2.5 | 2.5 | 4 |
| Kurtosis; = [50,60]° | 5.8 | 3.5 | 1.96 |
| Kurtosis; = [20,30]° | 4.1 | 2.8 | 2.5 |
| Skewness; = [50,60]° | −1.5 | −0.6 | 0 |
| Skewness; = [20,30]° | −0.5 | 0 | −0.1 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Carreno-Luengo, H.; Luzi, G.; Crosetto, M. Impact of the Elevation Angle on CYGNSS GNSS-R Bistatic Reflectivity as a Function of Effective Surface Roughness over Land Surfaces. Remote Sens. 2018, 10, 1749. https://doi.org/10.3390/rs10111749
Carreno-Luengo H, Luzi G, Crosetto M. Impact of the Elevation Angle on CYGNSS GNSS-R Bistatic Reflectivity as a Function of Effective Surface Roughness over Land Surfaces. Remote Sensing. 2018; 10(11):1749. https://doi.org/10.3390/rs10111749
Chicago/Turabian StyleCarreno-Luengo, Hugo, Guido Luzi, and Michele Crosetto. 2018. "Impact of the Elevation Angle on CYGNSS GNSS-R Bistatic Reflectivity as a Function of Effective Surface Roughness over Land Surfaces" Remote Sensing 10, no. 11: 1749. https://doi.org/10.3390/rs10111749