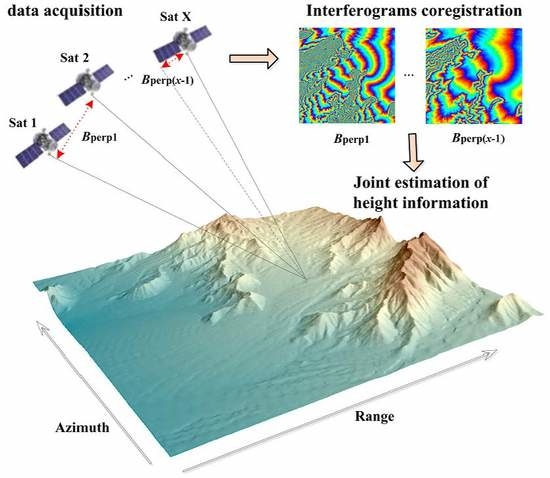
Figure 1.
Flowchart for spaceborne multi-baseline InSAR DEM generation.
Figure 1.
Flowchart for spaceborne multi-baseline InSAR DEM generation.
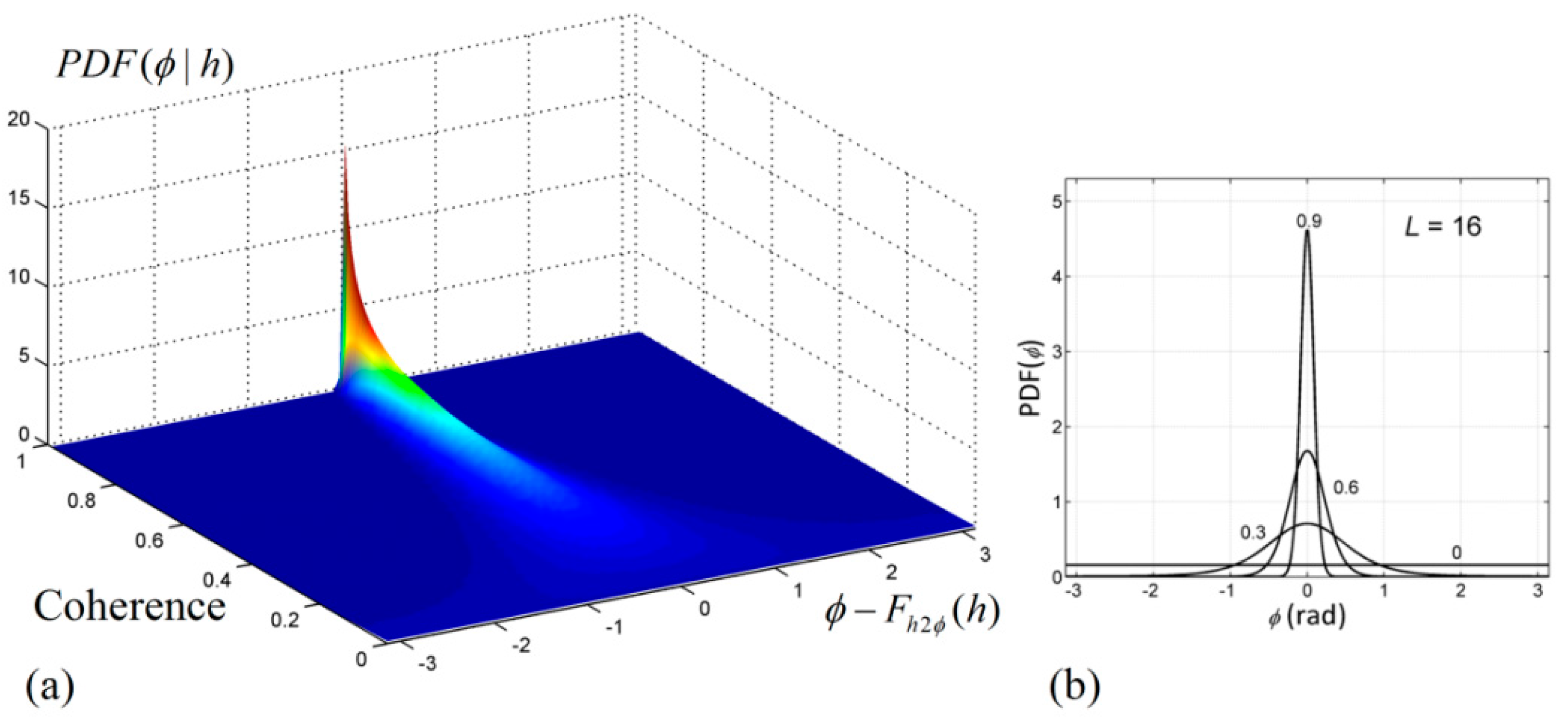
Figure 2.
(a) The fitted surface by the look-up table with ENL L = 16 and (b) the profile perpendicular to the coherence axis with .
Figure 2.
(a) The fitted surface by the look-up table with ENL L = 16 and (b) the profile perpendicular to the coherence axis with .
Figure 3.
(a) Hillshade of 10 m NED DEM; (b) hillshade of 15 × 15 smoothing filtered NED DEM; (c) NED DEM (upper) and smoothing filtered NED DEM (lower); (d–f) are the simulated interferograms I, II, and III, respectively, and the phase noise introduced by decorrelation is superimposed; (g–i) are the simulated atmospheric phase for interferograms I, II, and III, respectively; (j–l) are the simulated interferograms I, II, and III superimposed by the atmospheric phase (g–i), respectively.
Figure 3.
(a) Hillshade of 10 m NED DEM; (b) hillshade of 15 × 15 smoothing filtered NED DEM; (c) NED DEM (upper) and smoothing filtered NED DEM (lower); (d–f) are the simulated interferograms I, II, and III, respectively, and the phase noise introduced by decorrelation is superimposed; (g–i) are the simulated atmospheric phase for interferograms I, II, and III, respectively; (j–l) are the simulated interferograms I, II, and III superimposed by the atmospheric phase (g–i), respectively.
Figure 4.
Multi-baseline InSAR DEMs (without atmospheric effects) and height error maps, without the prior DEM (a,b) and with the prior DEM (c–e) is the hillshade of (c) with the enlarged topographic details of a small area.
Figure 4.
Multi-baseline InSAR DEMs (without atmospheric effects) and height error maps, without the prior DEM (a,b) and with the prior DEM (c–e) is the hillshade of (c) with the enlarged topographic details of a small area.
Figure 5.
(a) Multi-baseline InSAR DEM with prior DEM (with atmospheric effects); (b) height error map; (c) is the hillshade map of (a).
Figure 5.
(a) Multi-baseline InSAR DEM with prior DEM (with atmospheric effects); (b) height error map; (c) is the hillshade map of (a).
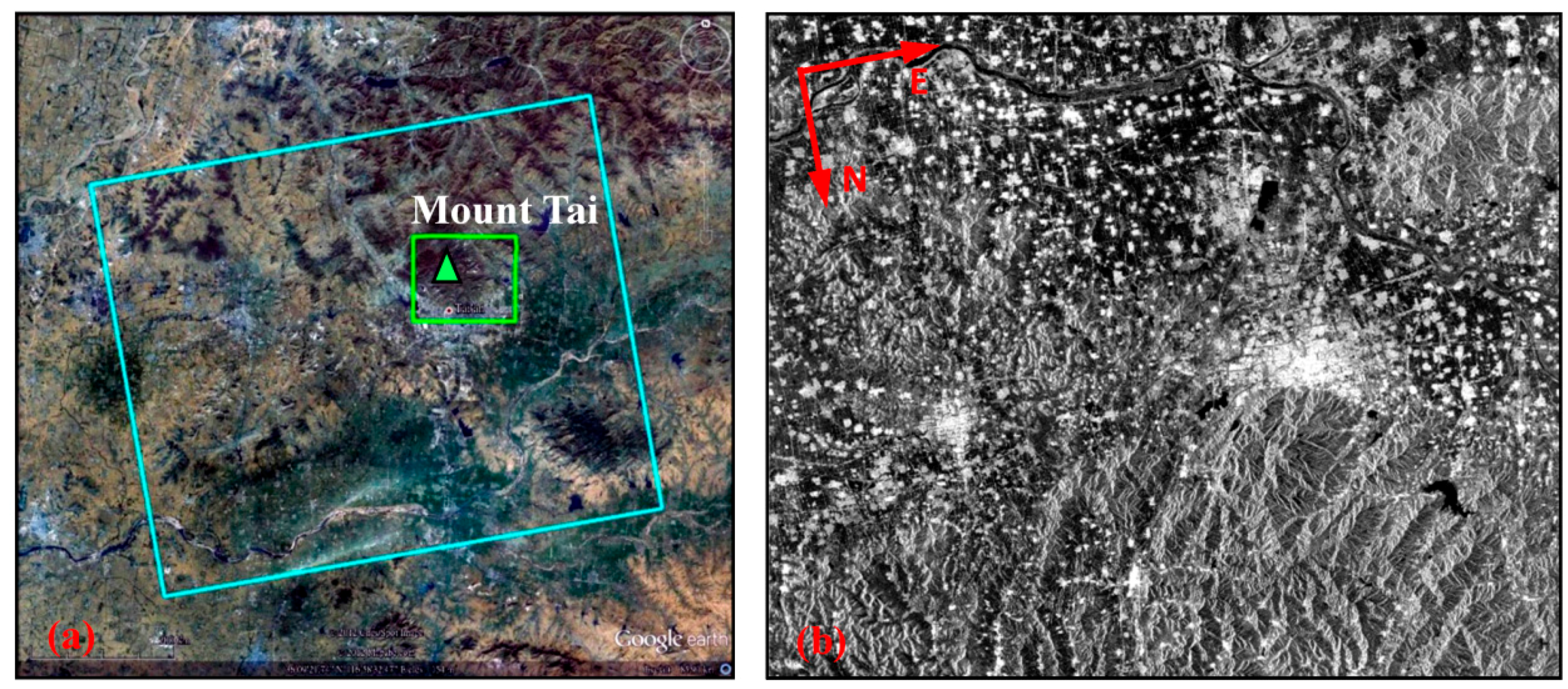
Figure 6.
(a) The coverage of ALOS/PALSAR images marked by the blue rectangle and 1:25,000 DEM marked by the green rectangle shown in Google Earth; (b) the amplitude image of ALOS/PALSAR data (acquisition time: 6 February 2008).
Figure 6.
(a) The coverage of ALOS/PALSAR images marked by the blue rectangle and 1:25,000 DEM marked by the green rectangle shown in Google Earth; (b) the amplitude image of ALOS/PALSAR data (acquisition time: 6 February 2008).
Figure 7.
The temporal and spatial baseline distribution of ALOS/PALSAR interferometric pairs. The images connected by the blue line constitute interferometric pairs and the interferograms connected by the red line are co-registered to the same image space.
Figure 7.
The temporal and spatial baseline distribution of ALOS/PALSAR interferometric pairs. The images connected by the blue line constitute interferometric pairs and the interferograms connected by the red line are co-registered to the same image space.
Figure 8.
Flattened interferograms of the ALOS/PALSAR data. (a) Interferogram I, m; (b) Interferogram II, m; (c) Interferogram III, m; (d) Interferogram IV, m.
Figure 8.
Flattened interferograms of the ALOS/PALSAR data. (a) Interferogram I, m; (b) Interferogram II, m; (c) Interferogram III, m; (d) Interferogram IV, m.
Figure 9.
Hillshades of single/multi-baseline DEMs and SRTM DEM corresponding to the black rectangle in
Figure 8a. (
a) Multi-baseline InSAR DEM; (
b) radar-coded SRTM DEM; (
c) Interferogram I DEM,
m; (
d) Interferogram II DEM,
m; (
e) Interferogram III DEM,
m; (
f) Interferogram IV DEM,
m.
Figure 9.
Hillshades of single/multi-baseline DEMs and SRTM DEM corresponding to the black rectangle in
Figure 8a. (
a) Multi-baseline InSAR DEM; (
b) radar-coded SRTM DEM; (
c) Interferogram I DEM,
m; (
d) Interferogram II DEM,
m; (
e) Interferogram III DEM,
m; (
f) Interferogram IV DEM,
m.
Figure 10.
Hillshade of multi-baseline InSAR DEM. The black rectangle marks the coverage of the 1:25,000 DEM used for accuracy validation.
Figure 10.
Hillshade of multi-baseline InSAR DEM. The black rectangle marks the coverage of the 1:25,000 DEM used for accuracy validation.
Figure 11.
The height error map of InSAR DEMs, (a) the DEM generated by ML estimation with prior DEM; (b) SRTM DEM; (c–f) are the DEMs generated by single-baseline interferograms I, II, III, and IV.
Figure 11.
The height error map of InSAR DEMs, (a) the DEM generated by ML estimation with prior DEM; (b) SRTM DEM; (c–f) are the DEMs generated by single-baseline interferograms I, II, III, and IV.
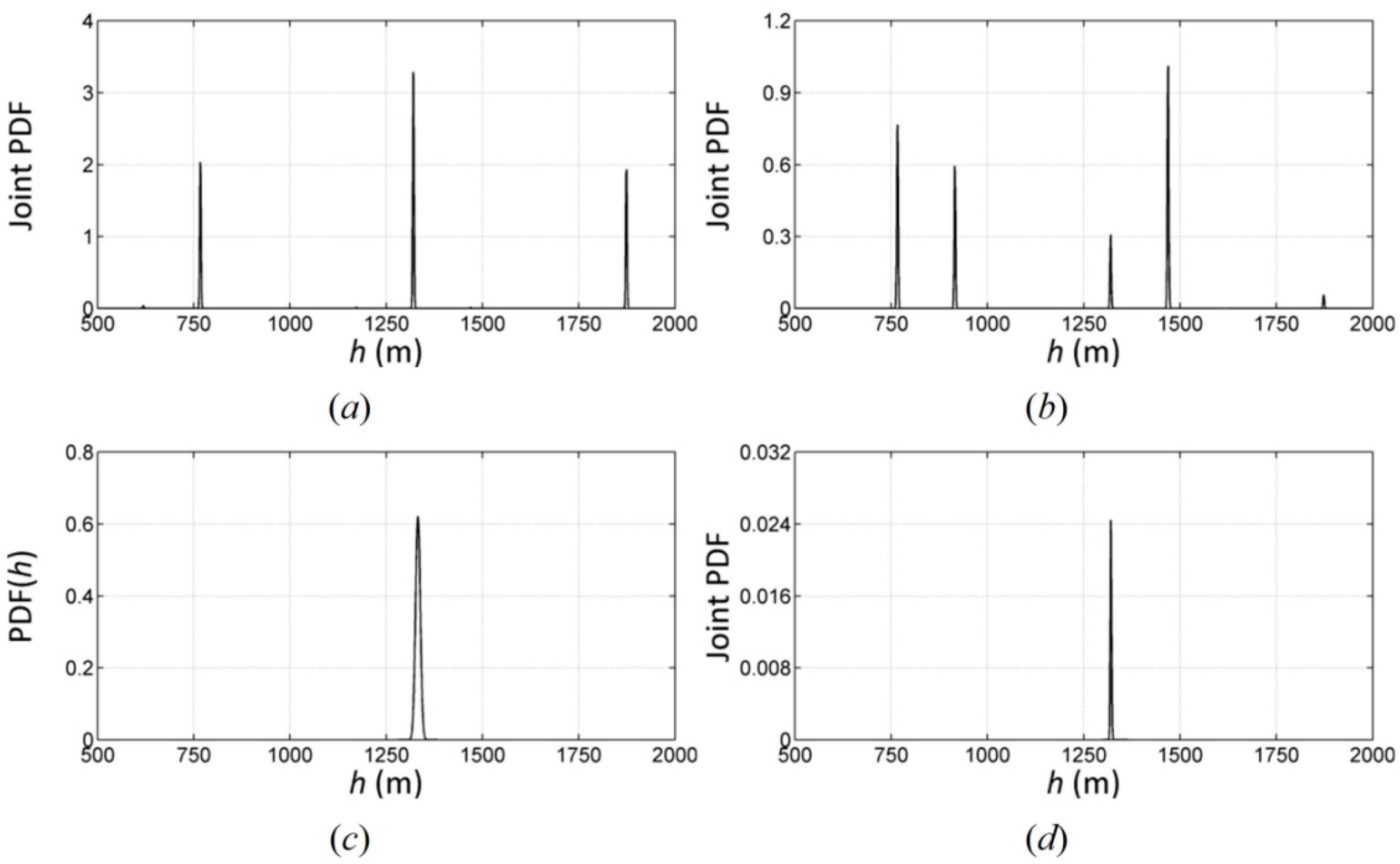
Figure 12.
The height probability distribution of a cell in the simulated interferogram with a true height of m. (a,b) The joint height probability distribution with and without decorrelation phase noise, respectively; (c) the prior height probability distribution acquired from the prior DEM; (d) the joint height probability distribution with the prior height probability distribution, obtained by multiplying the two probability distributions in (b,c).
Figure 12.
The height probability distribution of a cell in the simulated interferogram with a true height of m. (a,b) The joint height probability distribution with and without decorrelation phase noise, respectively; (c) the prior height probability distribution acquired from the prior DEM; (d) the joint height probability distribution with the prior height probability distribution, obtained by multiplying the two probability distributions in (b,c).
Table 1.
Height-to-phase conversion errors of rational function model.
Table 1.
Height-to-phase conversion errors of rational function model.
| Spaceborne InSAR Data | Height Ambiguity | Height-To-Phase |
|---|
| Max. Error | RMSE |
|---|
| ALOS/PALSAR | 82 m | 1.97 × 10−3° | 2.14 × 10−4° |
| COSMO-SkyMed | 164 m | −4.08 × 10−4° | 6.78 × 10−5° |
| TerraSAR-X | 59 m | −1.81 × 10−3° | 2.15 × 10−4° |
Table 2.
The simulation parameters of the interferograms.
Table 2.
The simulation parameters of the interferograms.
| | Interferogram I | Interferogram II | Interferogram III |
|---|
| Normal baseline | 47 m | 83 m | 178 m |
| Height ambiguity | 139.54 m | 79.02 m | 36.84 m |
| Coherence coefficient | 0.60 | 0.57 | 0.51 |
| Std. of phase noise | 0.254 rad | 0.277 rad | 0.333 rad |
Table 3.
Statistical values of height errors without atmospheric effects.
Table 3.
Statistical values of height errors without atmospheric effects.
| | Mean | Std. |
|---|
| Prior DEM | 0.007 m | 4.7 m |
| Interferogram I (Figure 3d) | 0.002 m | 5.6 m |
| Interferogram II (Figure 3e) | −0.010 m | 3.5 m |
| Interferogram III (Figure 3f) | −0.001 m | 2.0 m |
| ML without prior DEM | 70.072 m | 408.8 m |
| ML with prior DEM | −0.003 m | 1.6 m |
Table 4.
Statistical values of height errors with atmospheric effects.
Table 4.
Statistical values of height errors with atmospheric effects.
| | Mean | Std. |
|---|
| Interferogram I (Figure 3j) | −2.5 m | 16.2 m |
| Interferogram II (Figure 3k) | 2.5 m | 8.7 m |
| Interferogram III (Figure 3l) | −0.6 m | 4.6 m |
| ML with prior DEM | −0.006 m | 4.1 m |
Table 5.
Image parameters for ALOS/PLASAR data.
Table 5.
Image parameters for ALOS/PLASAR data.
| Acquisition Time | 22 December 2007/6 February 2008/23 March 2008/
27 December 2009/11 February 2010/29 March 2010 |
|---|
| Orbit direction | Ascending |
| Imaging mode | Stripmap |
| Polarization | HH |
| Central incidence angle | 38.7° |
| Sampling space of azimuth/range direction | 3.18 m/4.68 m |
| Band width of azimuth/range direction | 1522 Hz/28 MHz |
Table 6.
Parameters for ALOS/PALSAR interferometric pairs.
Table 6.
Parameters for ALOS/PALSAR interferometric pairs.
| | Interferogram I | Interferogram II | Interferogram III | Interferogram IV |
|---|
| Acquisition time of the Master image | 6 February 2008 | 6 February 2008 | 11 February 2010 | 11 February 2010 |
| Acquisition time of the Slave image | 22 December 2007 | 23 March 2008 | 27 December 2009 | 29 March 2010 |
| Temporal baseline | 46 days | 46 days | 46 days | 46 days |
| Normal baseline | −784 m | 77 m | −561 m | 185 m |
| Height ambiguity | 82 m | 833 m | 115 m | 347 m |
| Central Doppler frequency | 74/75 Hz | 74/80 Hz | 68/57 Hz | 68/46 Hz |
| Mean coherence coefficient | 0.52 | 0.53 | 0.58 | 0.50 |
Table 7.
Statistical values of height errors of single/multi-baseline InSAR DEMs and SRTM DEM.
Table 7.
Statistical values of height errors of single/multi-baseline InSAR DEMs and SRTM DEM.
| | Mean | Std. | Absolute Value ≤ 10 m |
|---|
| SRTM DEM | 4.9 m | 15.4 m | 58.9% |
| Interferogram I DEM | 1.9 m | 11.3 m | 81.4% |
| Interferogram II DEM | −4.4 m | 43.0 m | 32.8% |
| Interferogram III DEM | 2.3 m | 10.6 m | 83.0% |
| Interferogram IV DEM | −0.3 m | 27.7 m | 51.8% |
| multi-baseline DEM | 1.7 m | 8.6 m | 86.3% |















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}