Hydrological Regime Monitoring and Mapping of the Zhalong Wetland through Integrating Time Series Radarsat-2 and Landsat Imagery



Abstract

1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Datasets
2.2.1. Radarsat-2 Images and Preprocessing
2.2.2. Landsat OLI Image and Preprocessing
2.2.3. Ancillary Data and Preprocessing
2.2.4. Field Data
2.3. Wetlands Flooding Monitoring Based on Object-Oriented Classification Method
2.3.1. Regions of Interest (ROIs) Definition
2.3.2. Multiscale Segmentation
2.3.3. Flooding Extent and Flooding Frequency Extraction
2.4. Land Cover Mapping Based on Multisource Data
2.4.1. Feature Extraction
2.4.2. Land Cover Classification Based on Random Forest (RF) Algorithms
2.4.3. Classification Accuracy Evaluation
3. Results and Discussion
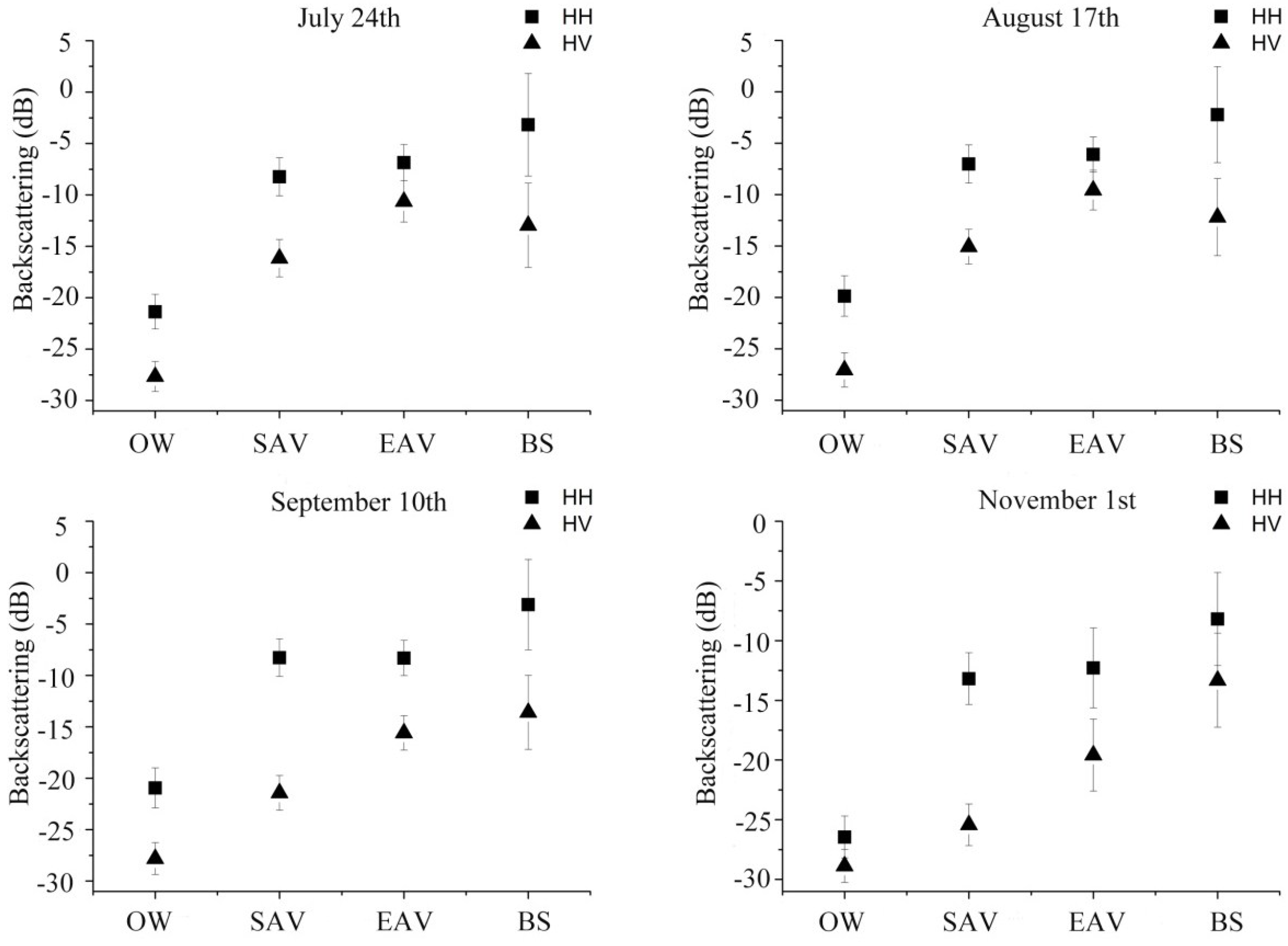
3.1. Backscattering Coefficient Analysis of the Different Flooding Situations
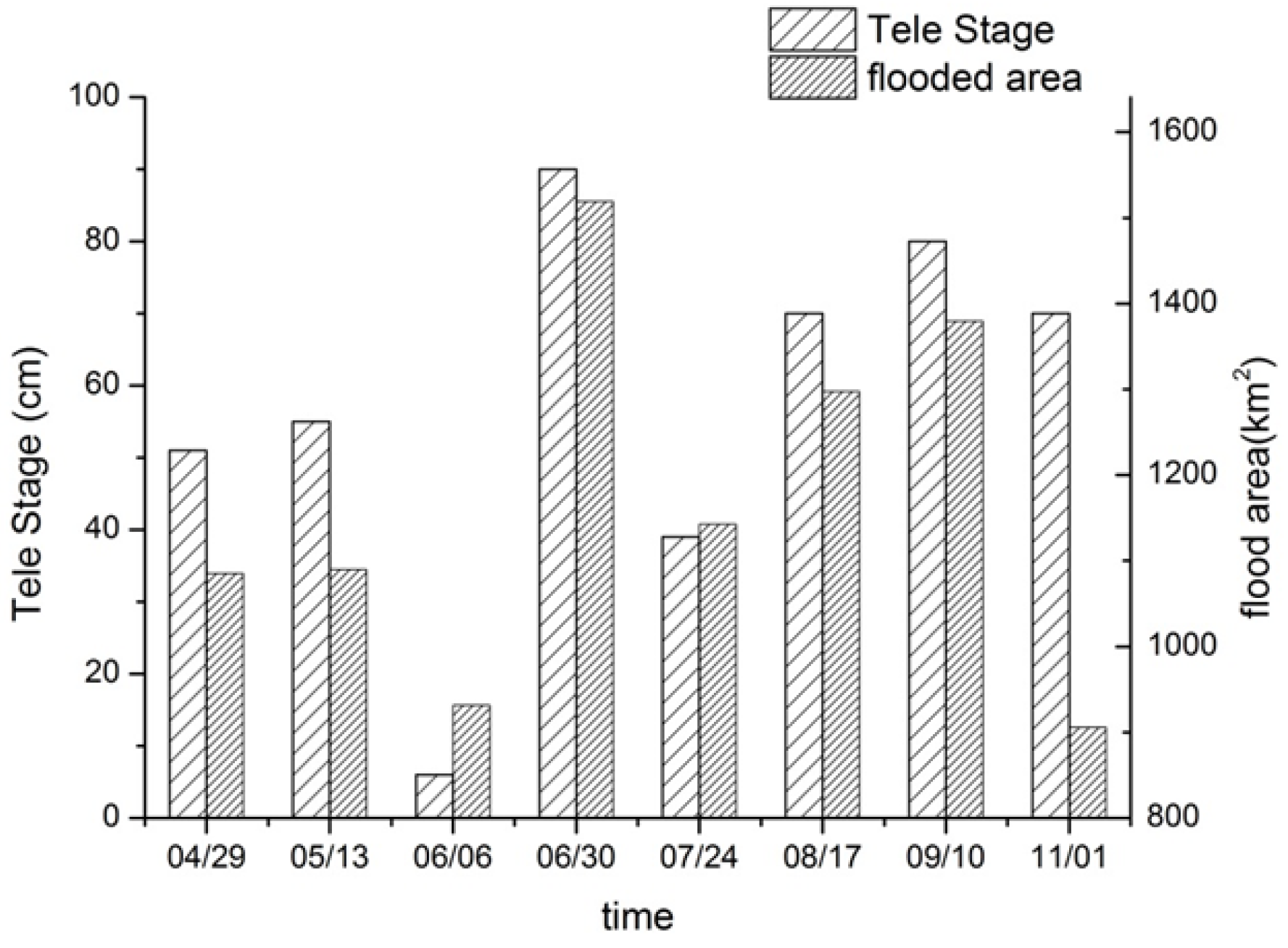
3.2. Hydrological Situation Map
3.3. Land Cover Classification and Accuracy Evaluation for Zhalong Wetland
4. Discussion
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- William, J.M.; James, G.G. Wetlands, 3rd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1993. [Google Scholar]
- Rykiel, E. Ecosystem science for the twenty-first century. BioScience 1997, 47, 705–707. [Google Scholar] [CrossRef][Green Version]
- Postel, S.; Richter, B.D. Rivers for Life: Managing Water for People and Nature; Island Press: Washington, DC, USA, 2003. [Google Scholar]
- Ordoyne, C.; Friedl, M.A. Using MODIS data to characterize seasonal inundation patterns in the Florida Everglades. Remote Sens. Environ. 2008, 112, 4107–4119. [Google Scholar] [CrossRef]
- Barbier, E.B.; Thompson, J.R. The value of water: Floodplain versus large-scale irrigation benefits in northern Nigeria. Ambio 1998, 27, 434–440. [Google Scholar]
- Junk, W.J.; Piedade, M.T.F. The Amazon River basin. In The World Largest Wetlands: Ecology and Conservation; Keddy, F.L., Ed.; Cambridge University Press: Cambridge, NY, USA, 2005; pp. 63–117. [Google Scholar]
- Na, X.D.; Zhang, S.Q.; Dale, P.; Li, X.F. Wetland mapping using classification trees to combine TM imagery with ancillary geographical data. Chin. Geogr. Sci. 2009, 19, 177–185. [Google Scholar] [CrossRef]
- Rundquist, D.; Narumalani, S.; Narayanan, R. A review of wetlands remote sensing and defining new considerations. Remote Sens. Rev. 2001, 20, 207–226. [Google Scholar] [CrossRef]
- Laine, A.; Heikkinen, K.; Heikkinen, M.; Kaijalainen, S.M. Integrated management and monitoring of boreal river basins: An application to the Finnish River Siuruanjoki. Large Rivers 2002, 13, 387–399. [Google Scholar] [CrossRef]
- Shalaby, A.; Tateishi, R. Remote sensing and GIS for mapping and monitoring land cover and land-use changes in the Northwestern coastal zone of Egypt. Appl. Geogr. 2007, 27, 28–41. [Google Scholar] [CrossRef]
- Tong, X.H.; Luo, X.; Liu, S.G.; Xie, H.; Chao, W.; Liu, S.; Liu, S.J.; Makhinov, A.N.; Makhinova, A.F.; Jiang, Y.Y. An approach for flood monitoring by the combined use of Landsat 8 optical imagery and COSMO-SkyMed radar imagery. ISPRS J. Photogramm. 2018, 136, 144–153. [Google Scholar] [CrossRef]
- Zhang, S.Q.; Na, X.D.; Kong, B.; Wang, Z.M.; Jiang, H.X.; Yu, H.; Zhao, Z.C.; Li, X.F.; Liu, C.Y.; Dale, P. Identifying wetland change in China’s Sanjiang Plain using remote sensing. Wetlands 2009, 29, 302–313. [Google Scholar] [CrossRef]
- Saalovara, K.; Thessler, S.; Malik, R.N.; Tuomisto, H. Classification of Amazonian primary rain forest vegetation using Landsat ETM+ satellite imagery. Remote Sens. Environ. 2005, 97, 39–51. [Google Scholar] [CrossRef]
- Alsdorf, D.; Melack, J.; Dunne, T.; Mertes, L.; Hess, L.; Smith, L. Interferometric radar measurements of water level changes on the Amazon flood plain. Nature 2000, 404, 174–177. [Google Scholar] [CrossRef] [PubMed]
- Alsdorf, D.; Smith, L.; Melack, J. Amazon floodplain water level changes measured with interferometric SIR-C radar. Remote Sens. 2001, 39, 423–431. [Google Scholar] [CrossRef]
- Lu, Z.; Crane, M.; Kwoun, O.; Wells, C.; Swarzenski, C.; Rykhus, R. C-band radar observes water-level change in swamp forests. EOS Trans. Am. Geophys. Union 2005, 86, 141–144. [Google Scholar] [CrossRef]
- Lu, Z.; Meyer, D. Study of high SAR backscattering due to an increase of soil moisture over less vegetated area: Its implication for characteristic of backscattering. Int. J. Remote Sens. 2002, 23, 1065–1076. [Google Scholar] [CrossRef]
- Kasischke, E.S.; Bourgeau-Chavez, L.L.; Rober, A.R.; Wyatt, K.H.; Waddington, J.M.; Turetsky, M.R. Effects of soil moisture and water depth on ERS SAR backscatter measurements from an Alaskan wetland complex. Remote Sens. Environ. 2009, 113, 1868–1873. [Google Scholar] [CrossRef]
- Kornelsen, K.C.; Coulibaly, P. Advanced in soil moisture retrieval from synthetic aperture radar and hydrological applications. J. Hydrol. 2013, 476, 460–489. [Google Scholar] [CrossRef]
- Kasischke, E.S.; Smith, K.B.; Bourgeau-Chavez, L.L.; Romanowicz, E.A.; Brunzell, S.; Richardson, C.J. Effects of seasonal hydrologic patterns in south Florida wetlands on radar backscatter measured from ERS-2 SAR imagery. Remote Sens. Environ. 2003, 88, 423–411. [Google Scholar] [CrossRef]
- Betbeder, J.; Rapinel, S.; Corgne, S.; Pottier, E.; Huber-Moy, L. TerraSAR-X dual-pol time-series for mapping of wetland vegetation. ISPRS J. Photogramm. Remote Sens. 2015, 107, 90–98. [Google Scholar] [CrossRef]
- Zhao, L.L.; Yang, J.; Li, P.X.; Zhang, L.P. Seasonal inundation monitoring and vegetation pattern mapping of the Erguna floodplain by means of RADARSAT-2 Fully polarimetric time series. Remote Sens. Environ. 2014, 152, 426–440. [Google Scholar] [CrossRef]
- Mahdianpari, M.; Salehi, B.; Mohammadimanesh, F.; Motagh, M. Random forest wetland classification using ALOS-2 L-band, RADARSAT-2 C-band, and TerraSAR-X imagery. ISPRS J. Photogramm. 2017, 130, 13–31. [Google Scholar] [CrossRef]
- Briem, G.J.; Benediktsson, J.A.; Sveinsson, J.R. Multiple classifiers applied to multisource remote sensing data. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2291–2299. [Google Scholar] [CrossRef]
- Wright, C.; Gallant, A. Improved wetland remote sensing in Yellowstone National Park using classification trees to combine TM imagery and ancillary geographical data. Remote Sens. Environ. 2007, 107, 582–605. [Google Scholar] [CrossRef]
- Lang, M.W.; Kasischke, E.S.; Prince, S.D.; Pittman, K.W. Assessment of C-band synthetic aperture radar data for mapping and monitoring Coastal Plain forested wetlands in the Mid-Atlantic Region, U.S.A. Remote Sens. Environ. 2008, 112, 4120–4130. [Google Scholar] [CrossRef]
- Bwangoy, J.B.; Hansen, M.C.; Roy, D.P.; Grandi, G.D.; Justice, C.O. Wetland mapping in the Congo Basin using optical and radar remotely sensed data and derived topographical indices. Remote Sens. Environ. 2010, 114, 73–86. [Google Scholar] [CrossRef]
- Na, X.D.; Zang, S.Y.; Liu, L.; Li, M. Wetland mapping in the Zhalong National Natural Reserve, China, using optical and radar imagery and topographical data. J. Appl. Remote Sens. 2013, 7, 609–618. [Google Scholar] [CrossRef]
- Lee, J.S.; Grunes, M.R.; Grandi, G.D. Polarimetric SAR speckle filtering and its implications for classification. IEEE Trams. Geosci. Remote Sens. 1999, 37, 2363–2373. [Google Scholar]
- Chavez, P.S. An improved dark-object subtraction technique for atmospheric scattering correction of multispectral data. Rem. Sens. Environ. 1988, 24, 459–479. [Google Scholar] [CrossRef]
- Martinez, J.-M.; Le Toan, T. Mapping of flood dynamics and spatial distribution of vegetation in the Amazon floodplain using multitemporal SAR data. Remote Sens. Environ. 2007, 108, 209–223. [Google Scholar] [CrossRef]
- Benz, U.C.; Hofmann, P.; Willhauck, G.; Lingenfelder, I.; Heynen, M. Multi-resolution, object-oriented fuzzy analysis of remote sensing data for GIS-ready information. ISPRS J. Photogram. 2004, 58, 239–258. [Google Scholar] [CrossRef]
- Duro, D.C.; Franklin, S.E.; Dube, M.G. A comparison of pixel-based and object-based image analysis with selected machine learning algorithms for the classification of agricultural landscapes using SPOT-5 HRG imagery. Remote Sens. Environ. 2011, 118, 259–272. [Google Scholar] [CrossRef]
- Mathieu, R.; Aryal, J.; Chong, A.K. Object-based classification of IKONOS imagery for mapping large-scale vegetation communities in urban areas. Sensors 2007, 7, 2860–2880. [Google Scholar] [CrossRef] [PubMed]
- Laliberte, A.S.; Fredrickson, E.L.; Rango, A. Combining decision trees with hierarchical object-oriented image analysis for mapping arid rangelands. Photogramm. Eng. Remote Sens. 2007, 73, 197–207. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Strahler, A.H.; Boschetti, L.; Foody, G.M.; Friedl, M.A.; Hansen, M.C.; Herold, M.; Mayaux, P.; Morisette, J.T.; Stehman, S.V.; Woodcock, C.E. Global Land Cover Validation: Recommendations for Evaluation and Accuracy Assessment of Global Land Cover Maps; GOFC-GOLT Report No. 25; Office for Official Publication of the European Communities: Luxemburg, 2006. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time | Accuracy | OW | SAV | EAV | BS | OA (%) | Kappa |
|---|---|---|---|---|---|---|---|
| 04/29 | UA (%) | 100 | 95.40 | 76.71 | 97.58 | 87.87 | 0.82 |
| PA (%) | 66.89 | 95.43 | 97.02 | 47.01 | |||
| 05/13 | UA (%) | 100 | 95.57 | 98.40 | 100 | 97.77 | 0.96 |
| PA (%) | 96.88 | 99.51 | 97.91 | 83.06 | |||
| 06/06 | UA (%) | 100 | 98.84 | 86.49 | 100 | 94.56 | 0.92 |
| PA (%) | 99.75 | 75.91 | 99.76 | 80.19 | |||
| 06/30 | UA (%) | 99.92 | 67.63 | 78.40 | 100 | 82.86 | 0.75 |
| PA (%) | 97.85 | 85.41 | 71.25 | 98.46 | |||
| 07/24 | UA (%) | 100 | 99.52 | 80.94 | 100 | 95.24 | 0.92 |
| PA (%) | 97.68 | 99.93 | 99.37 | 60.62 | |||
| 08/17 | UA (%) | 99.93 | 99.51 | 63.59 | 100 | 82.91 | 0.76 |
| PA (%) | 99.88 | 68.06 | 99.90 | 49.51 | |||
| 09/10 | UA (%) | 99.98 | 98.53 | 96.94 | 99.87 | 98.24 | 0.97 |
| PA (%) | 99.03 | 99.97 | 99.63 | 84.73 | |||
| 11/01 | UA (%) | 100 | 99.77 | 81.05 | 100 | 94.31 | 0.91 |
| PA (%) | 98.02 | 89.57 | 99.91 | 99.20 |
| Omission Error (%) | Commission Error (%) | |||
|---|---|---|---|---|
| OLI + SAR + HRF | OLI + SAR | OLI + SAR + HRF | OLI + SAR | |
| Cultivated land | 14.01 | 13.22 | 0.71 | 6.39 |
| Meadow | 3.01 | 3.01 | 51.27 | 77.34 |
| Marsh | 2.88 | 52.14 | 1.88 | 3.28 |
| Water | 0.84 | 0.84 | 1.57 | 1.57 |
| Residential area | 5.82 | 5.48 | 0.65 | 0.41 |
| Saline and alkaline land | 4.44 | 4.44 | 52.31 | 48.30 |
| Overall accuracy (%) | 91.73 | 76.49 | ||
| Kappa | 0.88 | 0.67 | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Na, X.; Zang, S.; Wu, C.; Tian, Y.; Li, W. Hydrological Regime Monitoring and Mapping of the Zhalong Wetland through Integrating Time Series Radarsat-2 and Landsat Imagery. Remote Sens. 2018, 10, 702. https://doi.org/10.3390/rs10050702
Na X, Zang S, Wu C, Tian Y, Li W. Hydrological Regime Monitoring and Mapping of the Zhalong Wetland through Integrating Time Series Radarsat-2 and Landsat Imagery. Remote Sensing. 2018; 10(5):702. https://doi.org/10.3390/rs10050702
Chicago/Turabian StyleNa, Xiaodong, Shuying Zang, Changshan Wu, Yang Tian, and Wenliang Li. 2018. "Hydrological Regime Monitoring and Mapping of the Zhalong Wetland through Integrating Time Series Radarsat-2 and Landsat Imagery" Remote Sensing 10, no. 5: 702. https://doi.org/10.3390/rs10050702
APA StyleNa, X., Zang, S., Wu, C., Tian, Y., & Li, W. (2018). Hydrological Regime Monitoring and Mapping of the Zhalong Wetland through Integrating Time Series Radarsat-2 and Landsat Imagery. Remote Sensing, 10(5), 702. https://doi.org/10.3390/rs10050702