1. Introduction
New generation single photon lidar (SPL) systems are designed to detect very weak laser returns, much more efficiently than linear mode lidar (LML). This high quantum sensitivity affords SPL a tremendous efficiency advantage over LML systems because they are able to collect data with a wider swath and from a higher altitude [
1]. Unfortunately, this high quantum sensitivity also makes the detectors of these systems susceptible to false returns from both solar background noise and detector dark count [
2]. Thus, it is difficult to classify and reconstruct features with low reflectivity or small cross sections from raw SPL data with current filtering and analysis methods because these points are typically sparsely distributed.
The removal of false returns has recently been an active area of research, with a majority of the approaches to date taking advantage of the fact that the noise points are randomly distributed and sparse, while the signal points tend to be much more clustered in space [
3]. The approaches can be broadly classified into two categories, histogram analysis [
4,
5,
6,
7] and voxel-based methods [
2,
3] . The core motivation behind all approaches is similar: to retain those data bins or voxels which satisfy standards based on an expected local noise density in a fixed volume. These approaches have high computational efficiency and are able to remove a majority of solar noise. However, they work at the resolution of a data bin or voxel within which all the photons are determined as either signal photons or noise returns, and thus are unable to remove near-signal noise returns at spacing smaller than the bin or voxel size. To overcome this limitation, an adaptive ellipsoid search (AES) method was previously presented, which can effectively remove near-signal noise by using an adaptive morphing ellipsoid [
8].
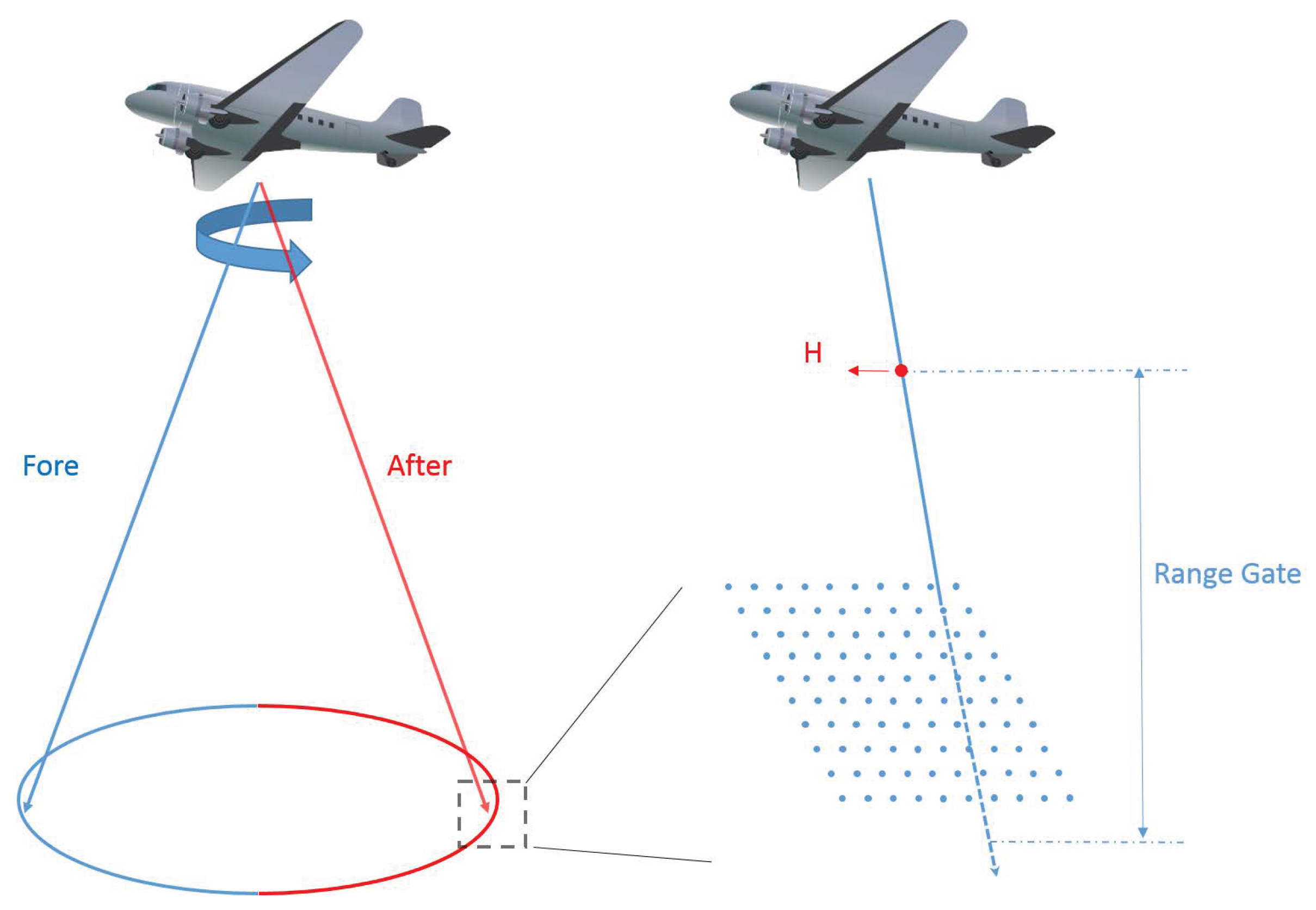
However, the original AES approach does not take advantage of the spatial correlation between overlapping observations from different epochs because it filters SPL data from individual portions of flightlines separately, without considering time or spatial overlap. During data collection, a majority of imaged areas are scanned repeatedly at multiple epochs and with differing collection geometries. In these overlapping areas, the spatial correlation of noise returns is not enhanced because of their random distribution within the range gate. However, for signal photons, the return locations from different observational epochs are correlated. The simultaneous analysis of all observations from a particular area results in more clustered signal points, which will enable improved filtering results. These clustered observations are more advantageous when considering weak signal returns from objects such as power lines than for larger targets with strong reflectance (e.g., rooftops).
The filtering process required for a combined point cloud consisting of multiple time separated observations of an area differs from that used to examine raw SPL data on an epoch by epoch basis. For instantaneous epoch filtering, the basic processing flow for the histogram-based, voxel-based, and AES methods is similar: extract the characteristics of the noise returns (e.g., distribution, point density, etc.) in regions without signal points, and then use these characteristics to remove them in the entire dataset according to the expected instantaneous properties of the noise. However, for combined multi-look SPL data, the statistics and characteristics of the noise returns are not static because different observations are combined from different points in time, and the noise density is known to vary substantially with both time and viewing geometry. Therefore, a new methodology for combined SPL data filtering is required.
In this paper, an improved AES method is proposed, called the voxel-spherical adaptive ellipsoid searching (VSAES) method, in which a voxel spherical (VS) model is adopted to estimate the point density of the combined point cloud, and an improved adaptive ellipsoid searching (AES) method is applied to remove the noise points. The new VSAES method is based on a probabilistic hypothesis test and the selection of a 95% confidence interval instead of the empirically determined ratio test used in the original AES method. The performance of this new method is evaluated by examining the preservation of powerline points during the filtering process. Powerline impingement points have a small effective cross section and are normally made of dark (at the laser wavelength) material which makes for weak reflections, and are thus an ideal case study of the improvement in filtering results using our proposed VSAES method. Extraction of powerlines is also an important reconstruction task in a variety of lidar point cloud applications [
9,
10,
11,
12] and therefore examining the extraction of lidar returns from powerlines is important to assess the potential of SPL for large scale automated powerline mapping.
The rest of the paper is organized as follows:
Section 2 describes the experiments undertaken by introducing the datasets and study areas, followed by a detailed explanation of the proposed VSAES method, and the recent modifications to adaptive ellipsoidal search criteria. In
Section 3, the experimental results are explored and discussion of findings is provided. Finally, in
Section 4, the conclusions which were drawn from the study are presented.
3. Results and Discussion
3.1. Results
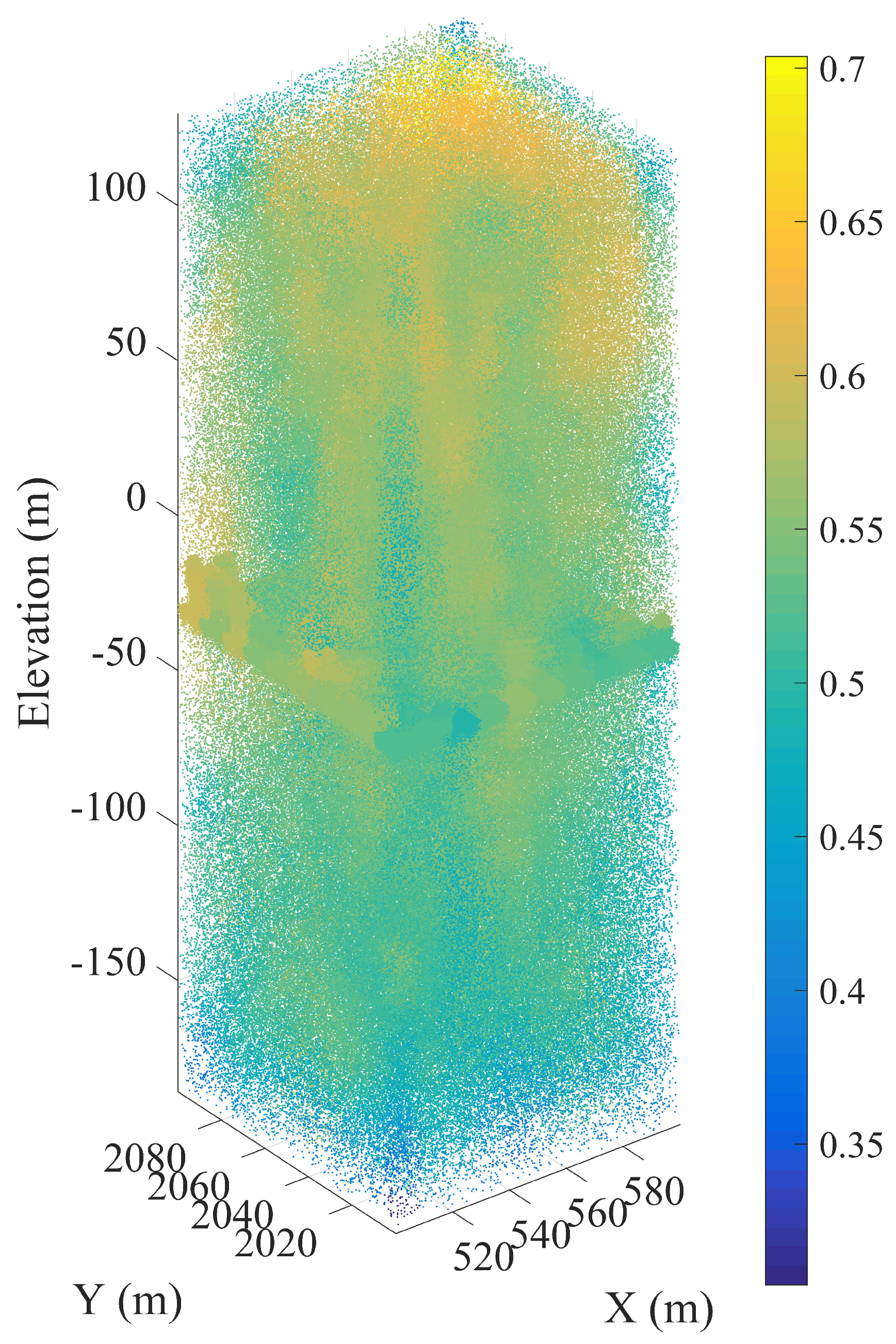
The VS model was first applied to each data block.
Figure 4 displays the results for a representative VS model where it can be seen that the noise density is uneven throughout the whole data block. This demonstrates the importance of considering the scanning geometry when estimating noise level.
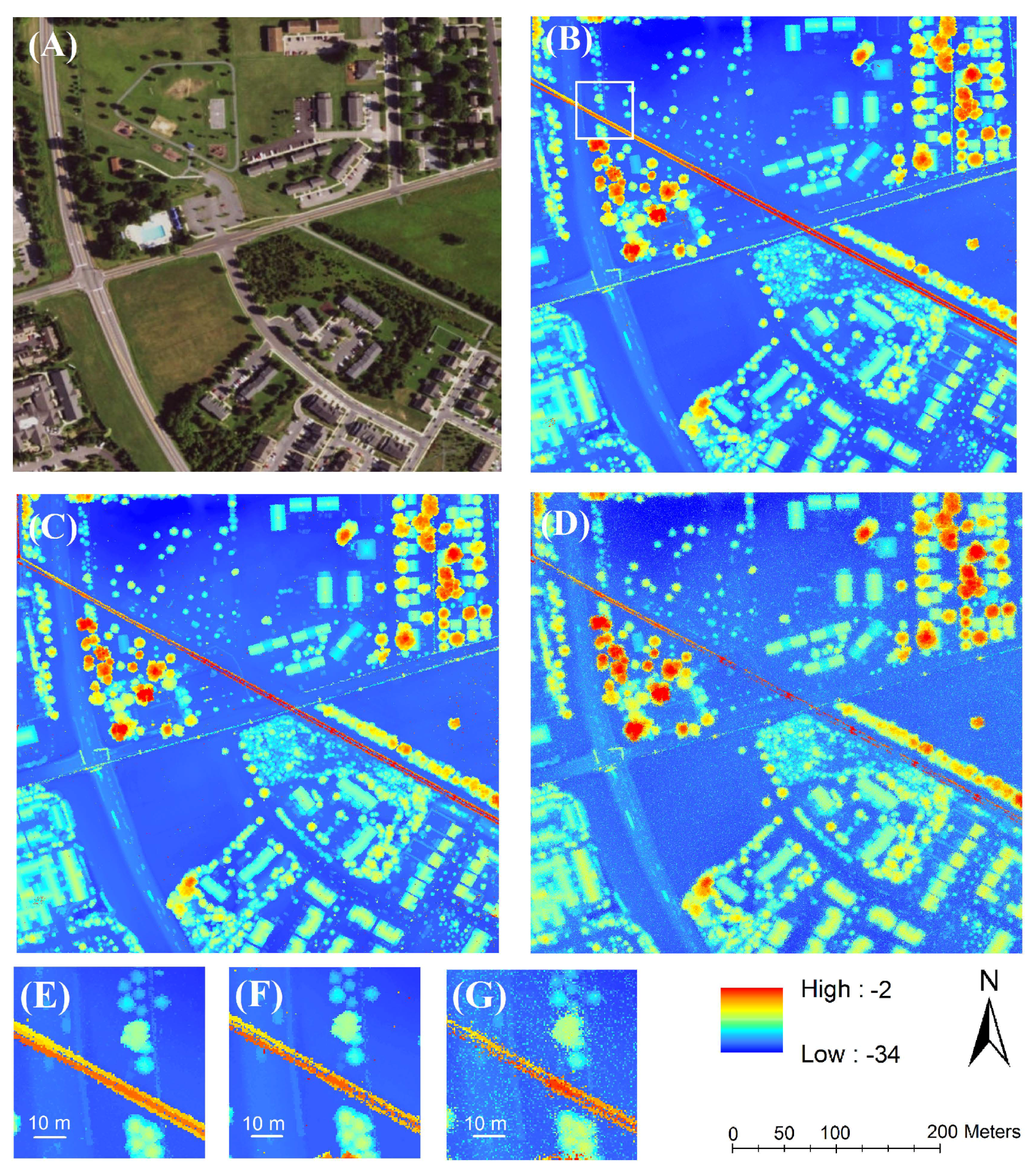
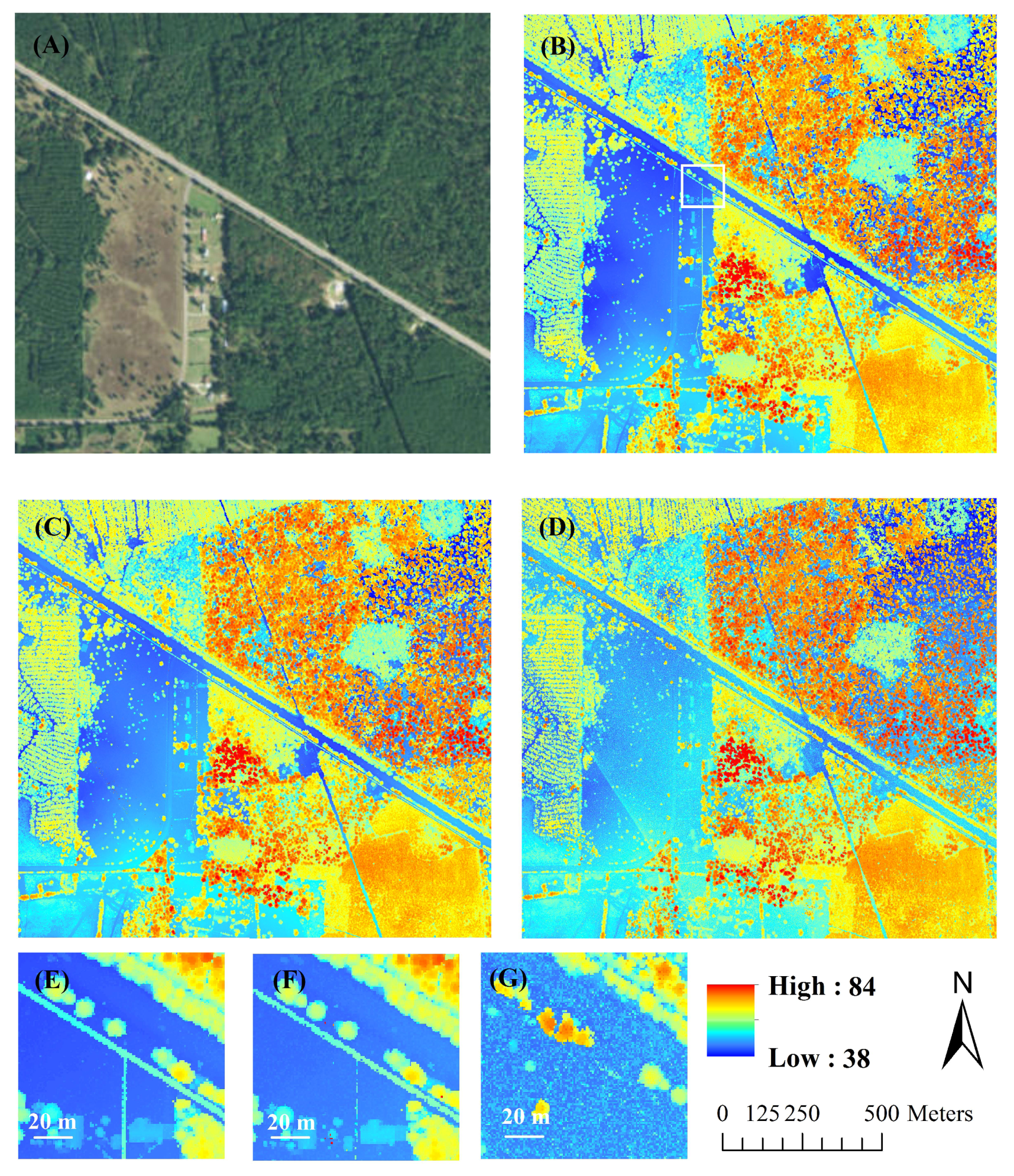
The filtered result with both VS and AES applied is shown in
Figure 5. For comparison, the filtered result for the same area using a histogram method and the original AES method are also shown. The histogram method proposed by Degnan was used; more details on this method can be found in [
1,
4].
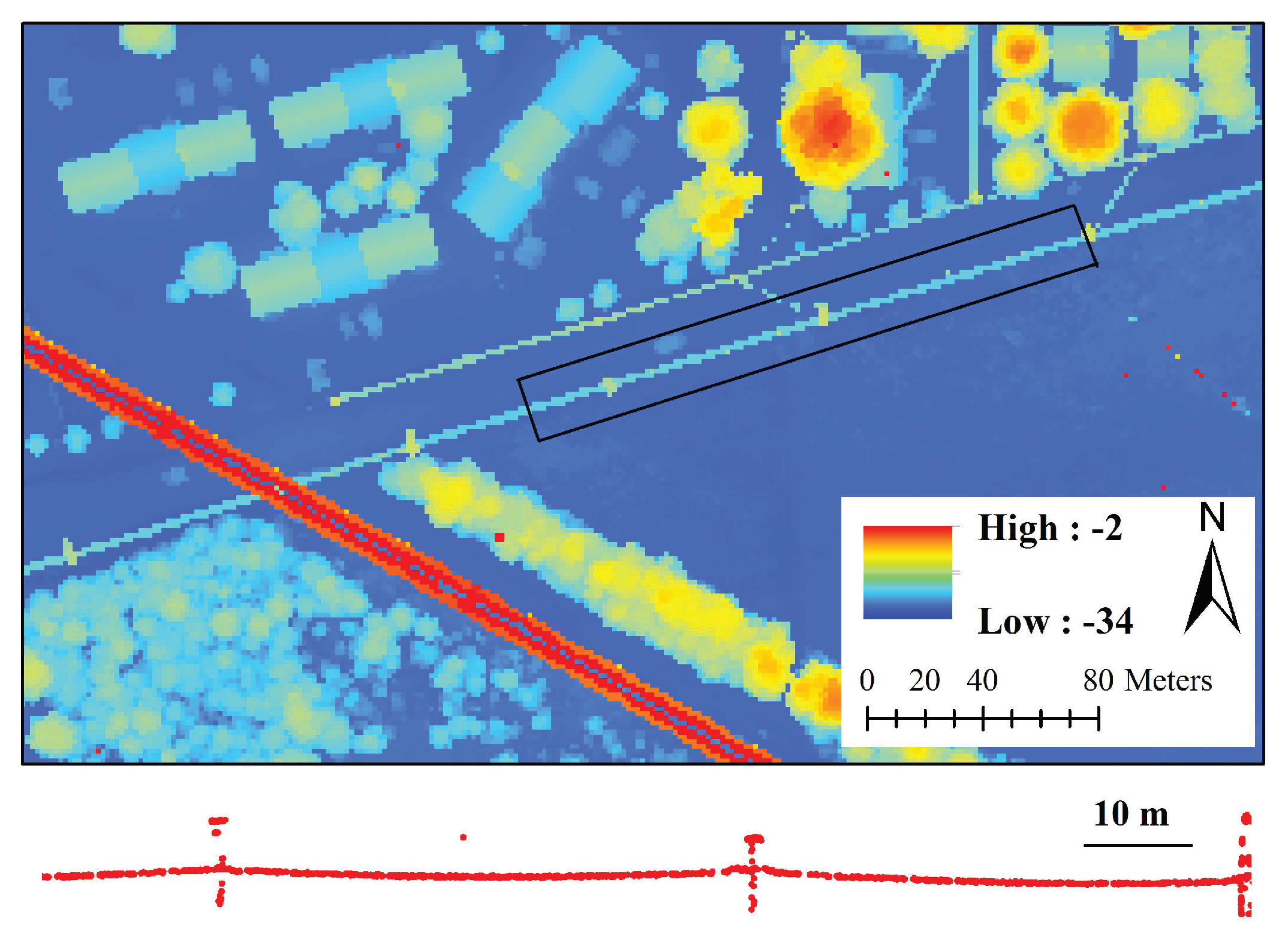
The red linear feature crossing
Figure 5 from the top left to bottom right is a transmission line. Significant differences in the appearance of this transmission line can be noted when comparing the three filtered results. The transmission line returns have also been manually classified for comparison with the automatically filtered results.
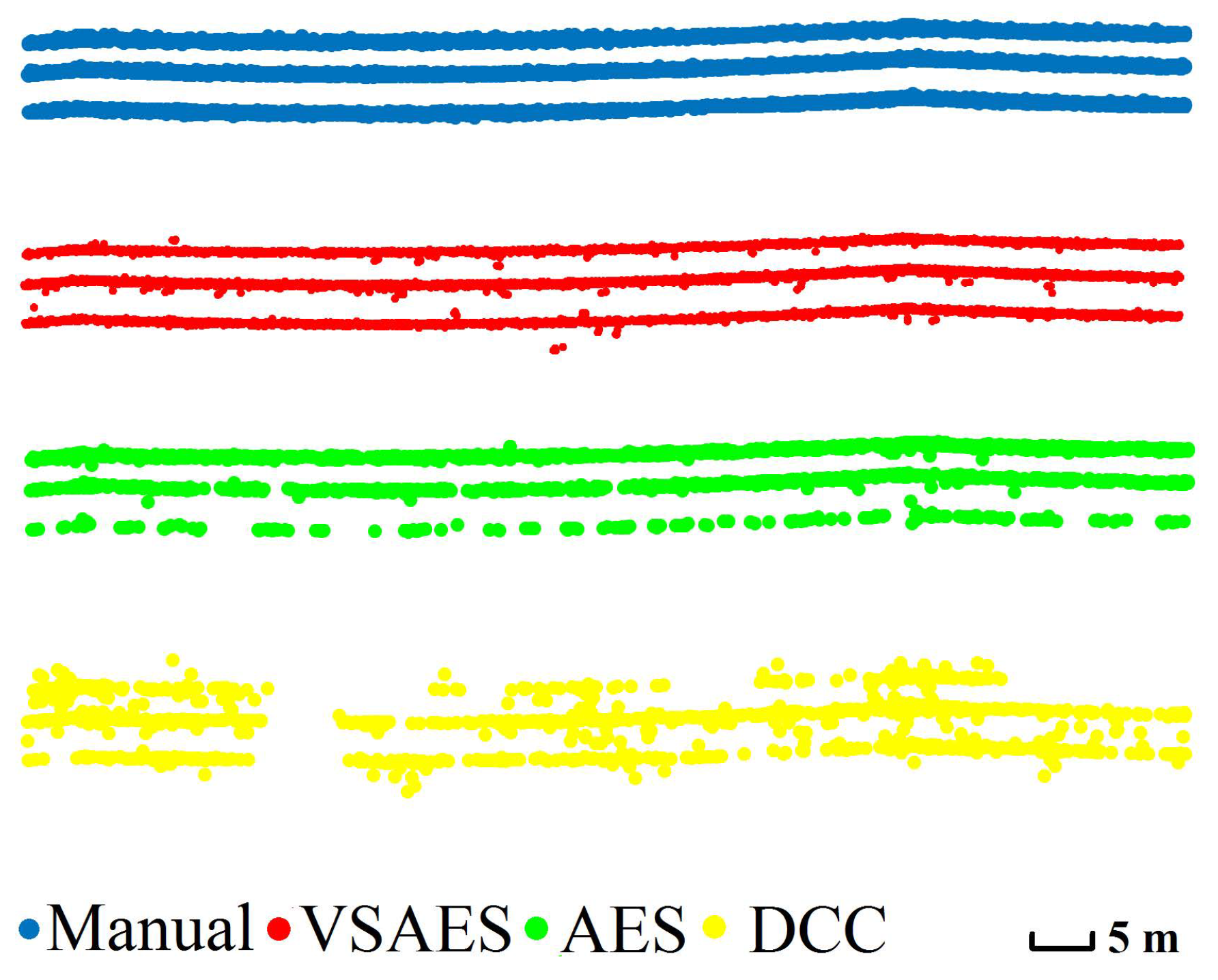
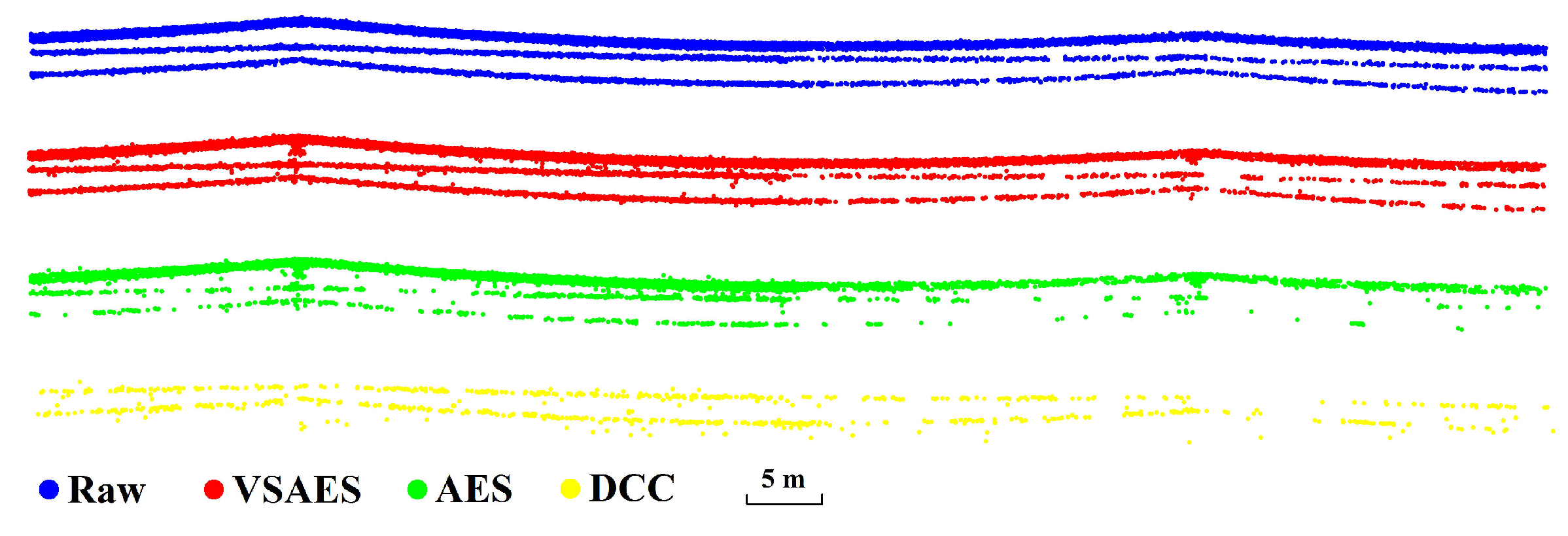
Figure 6 shows vertical profiles of the filtered and manually classified transmission line and
Table 1 gives a comparison of the filtered and manually classified datasets. A 7 m × 7 m (height × width) examination region is defined around the transmission line and the number of laser returns automatically classified as signal from the transmission line within it are counted. These points are then compared with the number of manually classified transmission points.
In
Table 1, the proposed method retains 89.1% of the power line points with only a few incorrectly classified noise returns. For comparison, AES keeps only 25.9% of the transmission line points and the DCC method retains only 13.4%. In
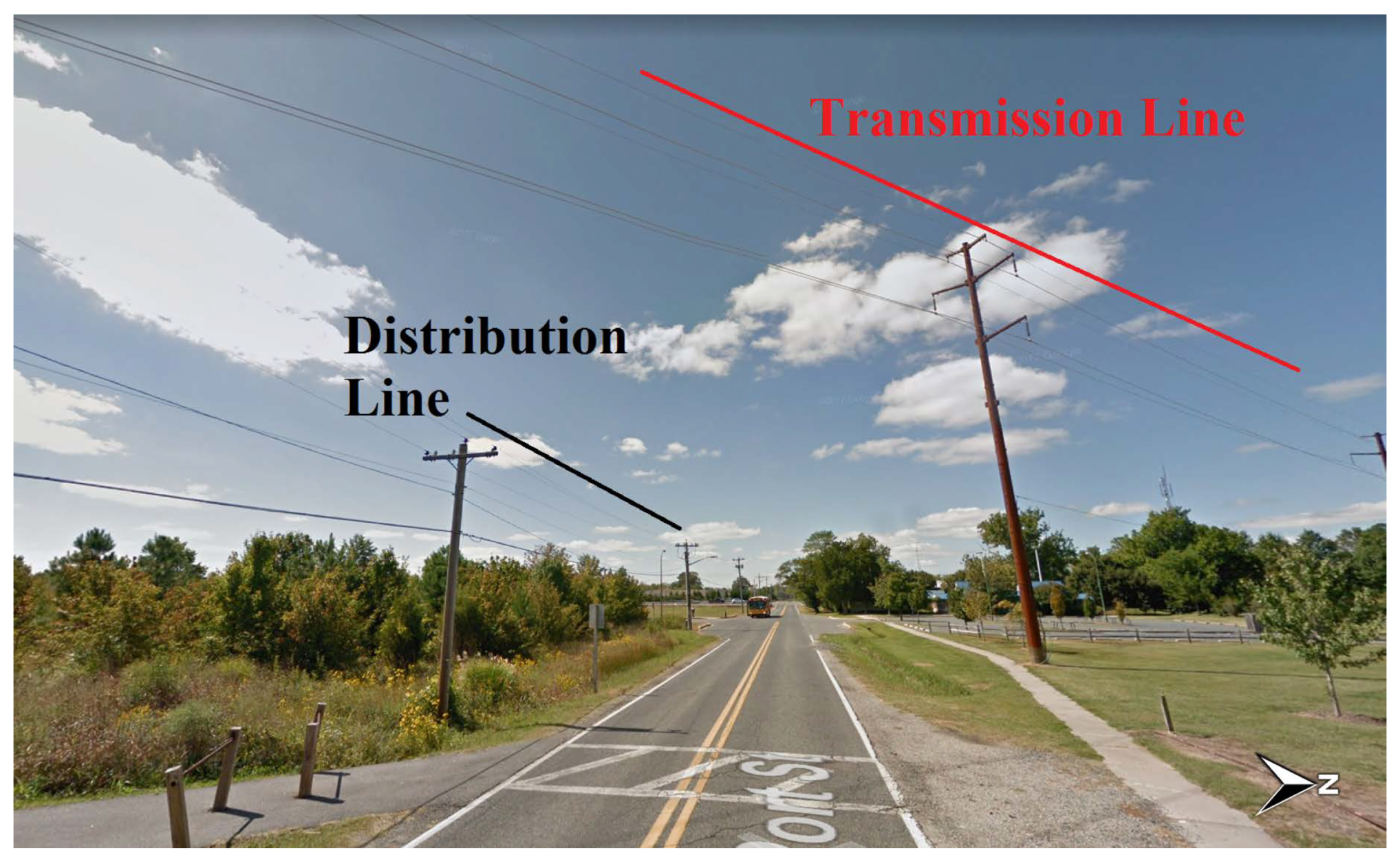
Figure 6, the transmission line points retained in the VSAES results discriminate the three separate cables clearly even though a few noise points remain misclassified close to the wires. For the AES result, the upper two lines are well defined, but the extraction of the third line is not complete with a large number of gaps appearing. For the DCC result, clear gaps can be found in all three cables and more noise points appear close to the transmission lines. An optical image of the transmission lines is displayed in
Figure 7. Both a qualitative visual check of the profile views in
Figure 6 and the statistical analysis presented in
Table 1 show that the extraction of weak signal points is significantly improved by combining the temporally spaced lidar observations and using the adaptive VSAES filtering approach.
Next, the results for a distribution line whose wires have an even smaller diameter than the transmission line are analyzed. As before, the signal points for the distribution line were manually extracted. One thing to note is that because of the low laser energy returned from distribution lines, even manual extraction is very hard and its accuracy is likely lower than that for larger transmission lines. Again, an examination region with the same size, 7 m × 7 m (height × width) was defined to evaluate the performance of the three filters; the statistics for distribution line extraction are given in
Table 2 and vertical profiles are shown in
Figure 8.
For the extraction of distribution lines, the proposed VSAES method detects only 60% of the line points, but this is still significantly more than the 29.3% for the AES method and 11.1% for the DCC method. In
Figure 8, the lowest wire in the VSAES profile is well detected with only a small gap. The top line has more gaps but there are still enough return points to accurately depict the distribution wire geometry. Results for the middle wire are the worst, with larger areas containing gaps. However, the results are still markedly better than for the other two filtering methods, and appear to contain enough points to adequately model all of the distribution lines. An optical image of the distribution lines is also displayed in
Figure 7.
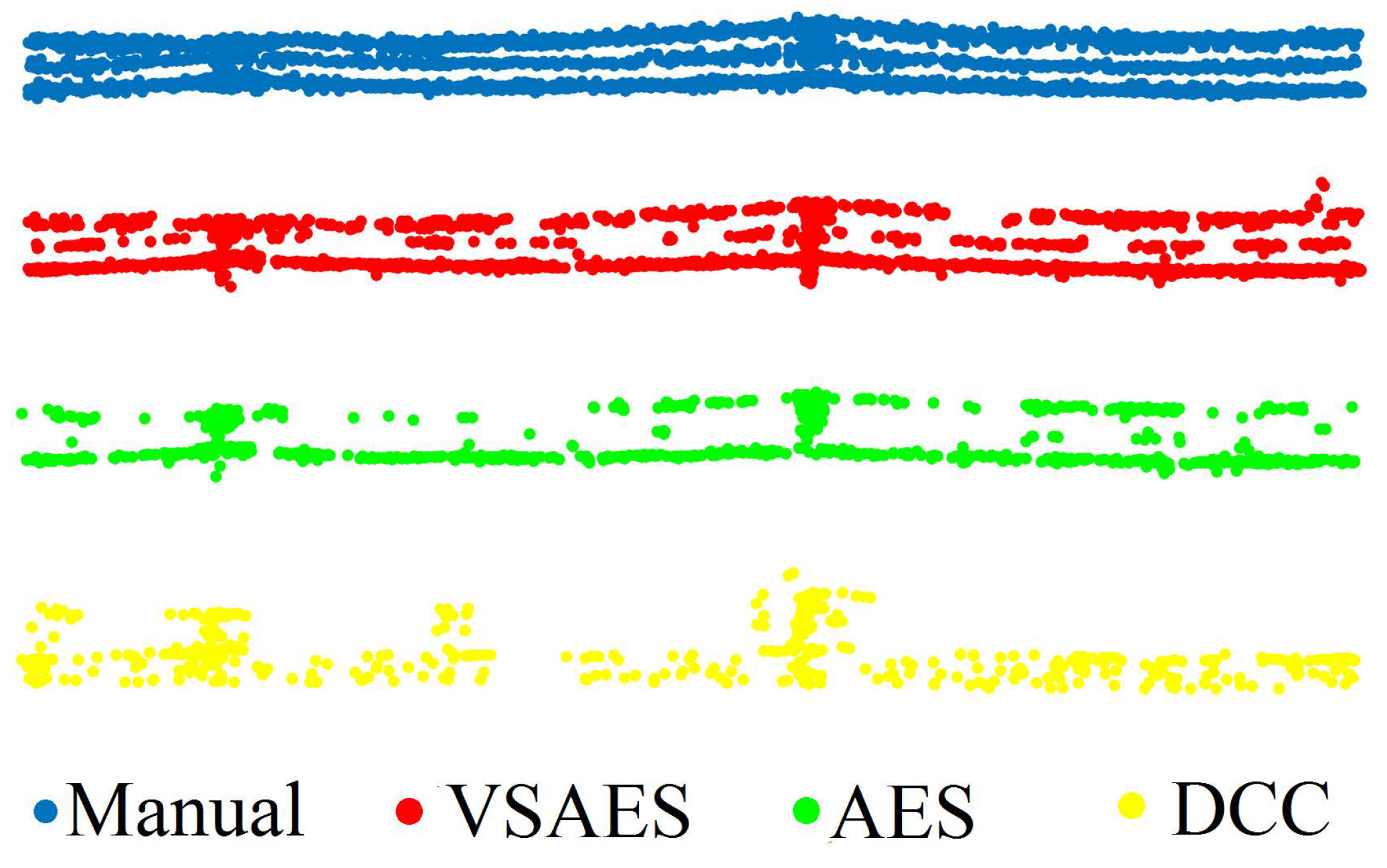
Finally, the performance for an additional power line captured in the Lufkin experimental dataset is examined. The filtered results using VSAES, AES, and DCC are displayed in
Figure 9. The detailed sub figures (E, F and G) in
Figure 9 show a region at an intersection of two distribution lines. Results from the proposed method retain both lines and clearly shows two lines. Only one line can be seen clearly from the AES results while the other is difficult to see. For the DCC results, no linear features are visible. Vertical profiles and statistical analysis for the three filtered results on the Lufkin dataset are given in
Figure 10 and
Table 3.
The proposed method significantly outperformed both the AES and DCC methods by correctly classifying 85.9% of distribution line points versus 37.9% and 6.1%, respectively, for the other methods. The top wire in the VSAES result is well extracted, while a few gaps can be found on the middle and bottom wires. By visual inspection of an oblique street view image (
Figure 11), it can be seen that there are three top wires and one wire at the middle and bottom levels, respectively. Thus, the top line in the vertical profile is composed of signal returns from three power lines, resulting in a clear line with no gaps in the profile figure.
3.2. Discussion
From the comparison of filtered results from the three sets of powerlines, significant improvement in automatically extracting powerline points can be seen by using the proposed method. The improvements seen in the VSAES results are primarily because of two factors: the adaptive consideration of the local point cloud geometry during filtering and the combination of overlapping flight lines before filtering. Due to the high linearity of the powerlines points, the calculated three dimensional point density for each wire point is relatively small. The DCC method filters SPL data using the resolution of a one dimensional range bin and retains all the points in the data bin as signal points if the query data bin satisfies the filtering criteria. This 1D filtering mechanism makes DCC have limited efficiency for weak signal returns such as those from powerlines. However, if the linearity of the powerline is considered (adapting to the local point cloud geometry), then VSAES can more effectively extract power line points compared to methods that do not consider the local geometrical characteristics of the point cloud.
In addition, due to the small cross-section of the laser footprints on the powerlines, there are only a small number of signal photons bounced back to the SPL detector. Because of the statistical nature of the sensor (i.e., relatively low photon detection efficiency), even fewer photons are recorded by the system, making them difficult to distinguish from noise within a single flightline. In these circumstances, even considering the local geometric information with the AES method is not sufficient to effectively retain enough powerline points; all observations from all overlapping flightlines need to be considered simultaneously, and the proposed VSAES method can fully utilize data from different observations and even different flightline collections by adaptively estimating local noise density. The powerlines are illuminated from different directions and the probability that the sensor receives photons from each part of the powerline is therefore increased, which enhances the spatial correlation of the powerline points and helps to improve the filtered results.
An additional advantage of VSAES over AES is the mathematical robustness of the former method. Even though both VSAES and AES consider local geometric information through a PCA, they utilize different measures to differentiate signal from noise. In AES, several neighbors for a query point within a sphere and then an ellipsoid determined by PCA are counted; the difference between these two numbers of neighbors is used as the decision measure and compared to an empirically determined threshold. The performance of the filtered results relies on a proper selection of this threshold. By contrast, the proposed VSAES method utilizes a filtering criteria based on a hypothesis test and the selection of a statistical 95% confidence threshold instead of an empirically determined threshold, therefore the VSAES is a more robust method.
One last thing to note is that even considering the enhanced spatial correlation and local geometry distribution from overlapping flight observations, there are still a number of powerline points missing; for example, the results for the distribution line in the Easton study area (shown in
Figure 8). By checking the corresponding optical image (shown in
Figure 11), it is observed that the top and middle lines are of smaller diameter than the bottom one and this likely explains the higher number of missing points for them. For a direct comparison a laser scanning dataset for the same distribution line collected with a linear-mode airborne Lidar system was also examined. The data were collected on 14 June 2016 using a Leica ALS 80 sensor operated at ∼1.3 km AGL and a nominal point density of ∼25 points/m
2. The top view and vertical profile of the distribution line from the linear-mode data are shown in
Figure 12. From the vertical profile, it can be seen that, even though the bottom wire is well defined, the top and middle lines are missing in the linear-mode data. The energy of the return signal is too low for the linear-mode system to detect, and would require an even lower flight height to capture these lines. However, in the SPL point cloud (flown at ∼2 km AGL), the top and middle lines are defined with enough points to model them. This also indicates that SPL has an advantage over LML for powerline mapping because the data can be collected from a higher flight altitude, which would greatly improve collection efficiency.
4. Conclusions
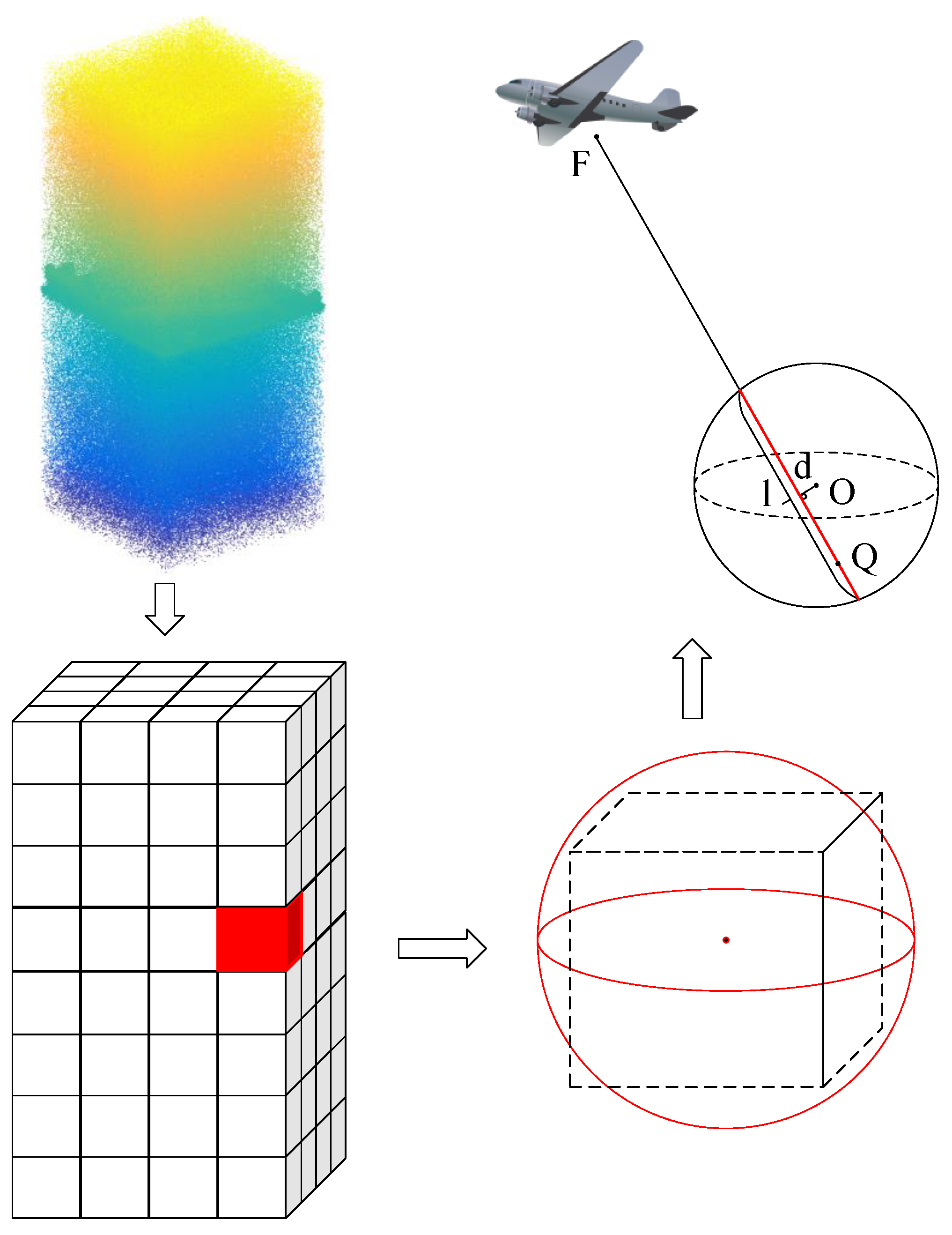
In this study, an improved VSAES algorithm was proposed to extract weak signal points from SPL point clouds, and the methodology was tested using examples from powerlines. The proposed method first reorganizes the combined data by tiling them into data blocks, during which the spatial correlation of the signal points is improved. The VS model is then used to estimate the expected number of noise points in each voxel and adaptively compensates for uneven noise density while also balancing computational load. Finally, an improved AES method, based on a hypothesis test, is used to filter the data. The combined VSAES method is used on a complete SPL dataset (instead of on a flightline by flightline basis) and makes a significant improvement for the extraction of weak signal returns from powerlines. In the first experimental area in Easton, MD, 89% of the transmission line points were correctly extracted versus 25.9% for the AES method and 13.4% for the DCC method. For a distribution line, whose return signals are even weaker (due to smaller wire diameter), the proposed VSAES method extracted 60% of the signal points versus 29.3% for AES and 11.1% for DCC. For the second Lufkin dataset, the VSAES extraction results had 85.9% correctly classified versus 37.9% and 6.1% for AES and DCC respectively. It was also demonstrated with coincident LML data that points from thin powerlines, which are not recorded in the LML data, can be detected from SPL data, even though the SPL system was flown at a higher AGL and with a wider swath coverage. The high quantum sensitivity and high data collection efficiency of the SPL system shows great potential for wide area powerline mapping and monitoring.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}