Regional Vicarious Calibration of the SWIR-Based Atmospheric Correction Approach for MODIS-Aqua Measurements of Highly Turbid Inland Water

 , ,
, , 
Abstract
:1. Introduction
2. Study Area and Data Description
2.1. Study Area Description
2.2. Water Surface Reflectance Measurements
2.3. MODIS-Aqua Description
3. Methods
3.1. Regional Vicarious Calibration Method
3.2. Atmospheric Correction Based on Vicarious Calibration Results
3.3. Accuracy Assessment of the Atmospheric Correction Results
4. Results
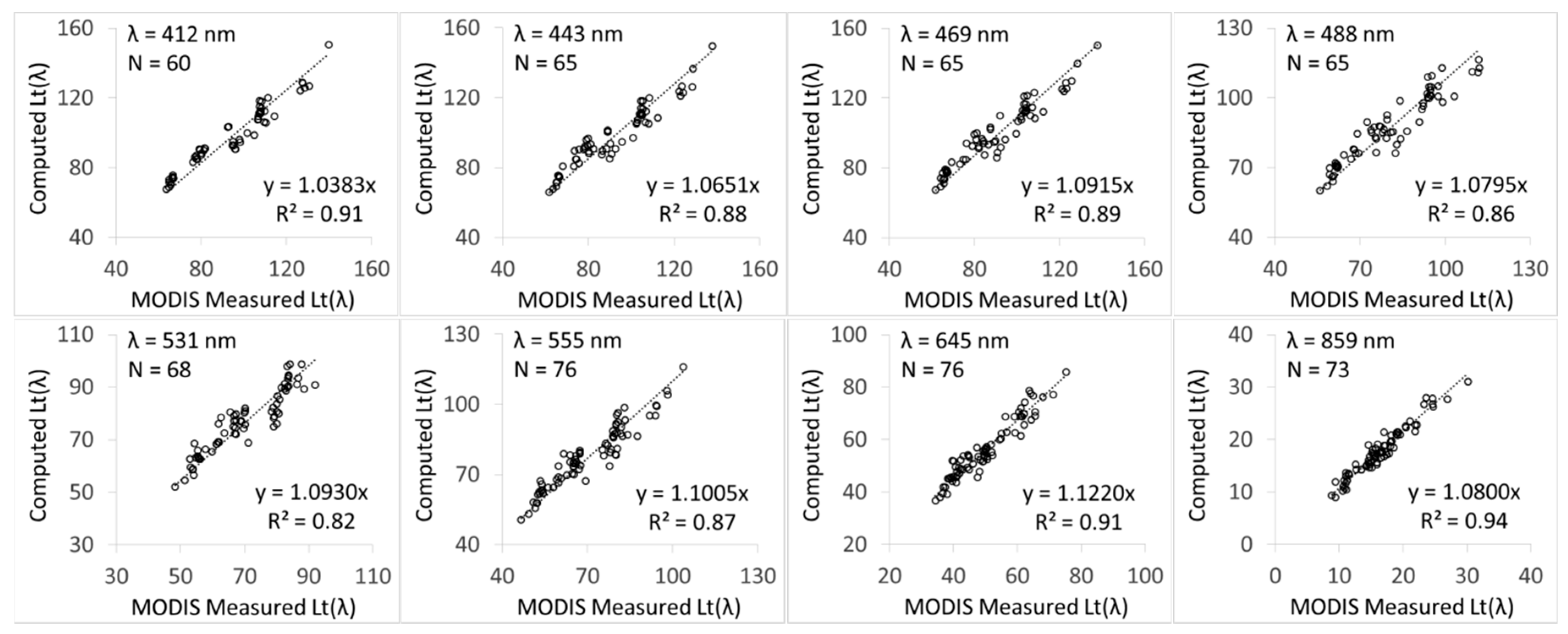
4.1. Vicarious Calibration Results
4.2. Atmospheric Correction Accuracy Assessment
4.2.1. Comparison of Atmospheric Correction Accuracy
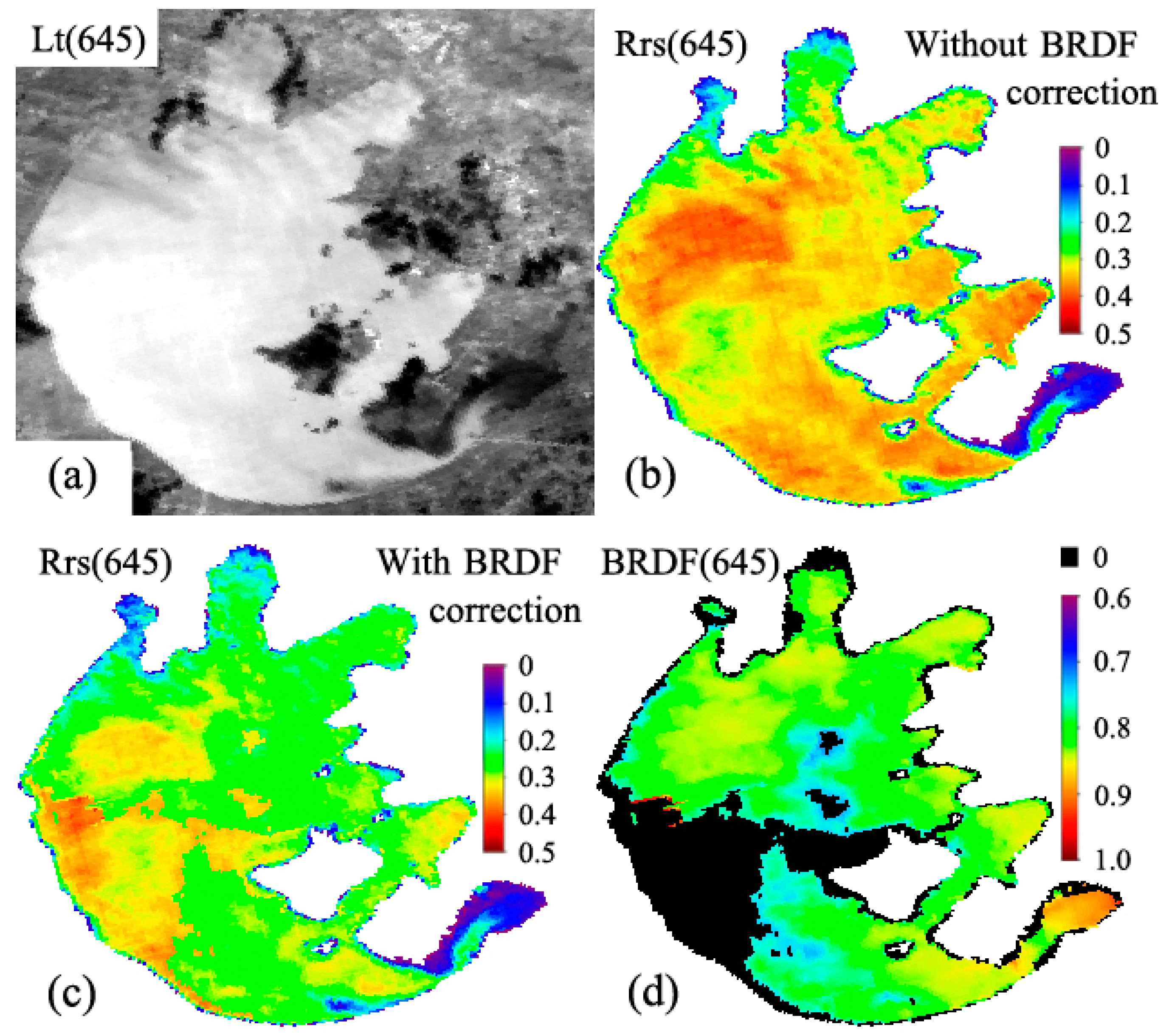
4.2.2. Comparison of Atmospheric-Corrected Images
5. Discussion
5.1. Effects of the BRDF Correction
5.2. Uncertainty and Applicability Analysis
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gordon, H.R.; Wang, M. Retrieval of water-leaving radiance and aerosol optical thickness over the oceans with SeaWiFS: A preliminary algorithm. Appl. Optics. 1994, 33, 443–452. [Google Scholar] [CrossRef] [PubMed]
- McClain, C.R. A decade of satellite ocean color observations. Annu. Rev. Mar. Sci. 2009, 1, 19–42. [Google Scholar] [CrossRef] [PubMed]
- Ruddick, K.G.; Ovidio, F.; Rijkeboer, M. Atmospheric correction of SeaWiFS imagery for turbid coastal and inland waters. Appl. Optics. 2000, 39, 897–912. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Siegel, D.A.; Wang, M.; Maritorena, S.; Robinson, W. Atmospheric correction of satellite ocean color imagery: the black pixel assumption. Appl. Opt. 2000, 39, 3582–3591. [Google Scholar] [CrossRef] [PubMed]
- Stumpf, R.; Arnone, R.; Gould, R.W.; Martinolich, P.M.; Ransibrahmanakul, V. A partially coupled ocean-atmosphere model for retrieval of water-leaving radiance from SeaWiFS in coastal waters. NASA Tech. Memo. 2003, 206892, 51–59. [Google Scholar]
- Lavender, S.J.; Pinkerton, M.H.; Moore, G.F.; Aiken, J.; Blondeau-Patissier, D. Modification to the atmospheric correction of SeaWiFS ocean colour images over turbid waters. Cont. Shelf. Res. 2005, 25, 539–555. [Google Scholar] [CrossRef]
- Bailey, S.W.; Franz, B.A.; Werdell, P.J. Estimation of near-infrared water-leaving reflectance for satellite ocean color data processing. Opt. Express 2010, 18, 7521–7527. [Google Scholar] [CrossRef] [PubMed]
- Hu, C.; Carder, K.L.; Muller-Karger, F.E. Atmospheric Correction of SeaWiFS Imagery over Turbid Coastal Waters: A Practical Method. Remote Sens. Environ. 2000, 74, 195–206. [Google Scholar] [CrossRef]
- Wang, M.; Wei, S. Estimation of ocean contribution at the MODIS near-infrared wavelengths along the east coast of the US: Two case studies. Geophys. Res. Lett. 2005, 32, 370. [Google Scholar] [CrossRef]
- Wang, M.; Shi, W. The NIR-SWIR combined atmospheric correction approach for MODIS ocean color data processing. Opt. Express 2007, 15, 15722–15733. [Google Scholar] [CrossRef] [Green Version]
- Wang, M.; Liu, X. The MODIS-SWIR Algorithm Theoretical Basis Document Version 1.0. In NOAA NESDIS STAR; 2012; 40p. Available online: https://www.star.nesdis.noaa.gov/sod/mecb/color/documents/SWIR_ATBD_ver1-2012.pdf (accessed on 1 July 2019).
- Hale, G.M.; Querry, M.R. Optical Constants of Water in the 200-nm to 200-μm Wavelength Region. Appl. Optics. 1973, 12, 555–563. [Google Scholar] [CrossRef] [PubMed]
- Wang, M.; Tang, J.; Shi, W. MODIS-derived ocean color products along the China east coastal region. Geophys. Res. Lett. 2007, 34, L06611. [Google Scholar] [CrossRef]
- Wang, M.; Son, S.; Shi, W. Evaluation of MODIS SWIR and NIR-SWIR atmospheric correction algorithms using SeaBASS data. Remote Sens. Environ. 2009, 113, 635–644. [Google Scholar] [CrossRef]
- Wang, M.; Shi, W.; Tang, J. Water property monitoring and assessment for China’s inland Lake Taihu from MODIS-Aqua measurements. Remote Sens. Environ. 2011, 115, 841–854. [Google Scholar] [CrossRef]
- Zhang, M.; Ma, R.; Li, J.; Zhang, B.; Duan, H. A Validation Study of an Improved SWIR Iterative Atmospheric Correction Algorithm for MODIS-Aqua Measurements in Lake Taihu, China. IEEE. Trans. Geosci. Remote Sens. 2014, 52, 4686–4695. [Google Scholar] [CrossRef]
- Wang, M.; Son, S.; Zhang, Y.; Shi, W. Remote Sensing of Water Optical Property for China’s Inland Lake Taihu Using the SWIR Atmospheric Correction With 1640 and 2130 nm Bands. IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens. 2013, 6, 2505–2516. [Google Scholar] [CrossRef]
- Gordon, H.R. In-orbit calibration strategy for ocean color sensors. Remote Sens. Environ. 1998, 63, 265–278. [Google Scholar] [CrossRef]
- Wang, M. In-orbit vicarious calibration for ocean color and aerosol products. In Proceedings of the 2005 IEEE International Geoscience and Remote Sensing Symposium, 2005, IGARSS ’05, Seoul, South Korea, 29 July 2005; 2005. [Google Scholar] [CrossRef]
- Franz, B.A.; Bailey, S.W.; P Jeremy, W.; Mcclain, C.R. Sensor-independent approach to the vicarious calibration of satellite ocean color radiometry. Appl. Optics. 2007, 46, 5068–5082. [Google Scholar] [CrossRef]
- Dash, P.; Walker, N.; Mishra, D.; D’Sa, E.; Ladner, S. Atmospheric Correction and Vicarious Calibration of Oceansat-1 Ocean Color Monitor (OCM) Data in Coastal Case 2 Waters. Remote Sens. 2007, 4, 1716–1740. [Google Scholar] [CrossRef]
- Zibordi, G.; Mélin, F.; Voss, K.J.; Johnson, B.C.; Franz, B.A.; Kwiatkowska, E.; Huot, J.-P.; Wang, M.; Antoine, D. System vicarious calibration for ocean color climate change applications: Requirements for in situ data. Remote Sens. Environ. 2015, 159, 361–369. [Google Scholar] [CrossRef]
- Wang, M.; Shi, W.; Jiang, L.; Voss, K. NIR- and SWIR-based on-orbit vicarious calibrations for satellite ocean color sensors. Opt. Express 2016, 24, 20437–20453. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Hu, C.; Shen, Q.; Barnes, B.B.; Murch, B.; Feng, L.; Zhang, M.; Zhang, B. Recovering low quality MODIS-Terra data over highly turbid waters through noise reduction and regional vicarious calibration adjustment: A case study in Taihu Lake. Remote Sens. Environ. 2017, 197, 72–84. [Google Scholar] [CrossRef]
- Concha, J.; Mannino, A.; Franz, B.; Bailey, S.; Kim, W. Vicarious calibration of GOCI for the SeaDAS ocean color retrieval. Int. J. Remote Sens. 2019, 40, 3984–4001. [Google Scholar] [CrossRef]
- Clark, D.K.; Gordon, H.R.; Voss, K.J.; Ge, Y.; Broenkow, W.; Trees, C. Validation of atmospheric correction over the ocean. J. Geophys. Res. - Atmos. 1997, 102, 17209–17217. [Google Scholar] [CrossRef]
- Li, J.; Shen, Q.; Zhang, B.; Chen, D. Retrieving total suspended matter in Lake Taihu from HJ-CCD near-infrared band data. Aquat. Ecosyst. Health. 2014, 17, 280–289. [Google Scholar] [CrossRef]
- Shi, K.; Zhang, Y.; Zhu, G.; Liu, X.; Zhou, Y.; Xu, H.; Qin, B.; Liu, G.; Li, Y. Long-term remote monitoring of total suspended matter concentration in Lake Taihu using 250m MODIS-Aqua data. Remote Sens. Environ. 2015, 164, 43–56. [Google Scholar] [CrossRef]
- Zhang, B.; Li, J.; Shen, Q.; Chen, D. A bio-optical model based method of estimating total suspended matter of Lake Taihu from near-infrared remote sensing reflectance. Environ. Monit. Assess. 2008, 145, 339–347. [Google Scholar] [CrossRef]
- Duan, H.; Ma, R.; Hu, C. Evaluation of remote sensing algorithms for cyanobacterial pigment retrievals during spring bloom formation in several lakes of East China. Remote Sens. Environ. 2012, 126, 126–135. [Google Scholar] [CrossRef]
- Duan, H.; Ma, R.; Loiselle, S.A.; Shen, Q.; Yin, H.; Zhang, Y. Optical characterization of black water blooms in eutrophic waters. Sci. Total Environ. 2014, 482, 174–183. [Google Scholar] [CrossRef]
- Sun, D.Y.; Yun, M.L.; Qiao, W.; Lv, H.; Cheng, F.L.; Chang, C.H.; Shao, Q.G. Detection of Suspended-Matter Concentrations in the Shallow Subtropical Lake Taihu, China, Using the SVR Model Based on DSFs. IEEE Geosci. Remote Sens. 2010, 7, 816–820. [Google Scholar] [CrossRef]
- Hu, C.; Lee, Z.; Ma, R.; Yu, K.; Li, D. MODIS observations of cyanobacteria blooms in Taihu Lake, China. J. Geophys. Res. 2010, 115, 1–20. [Google Scholar] [CrossRef]
- Le, C.; Li, Y.; Zha, Y.; Sun, D.; Huang, C.; Zhang, H. Remote estimation of chlorophyll a in optically complex waters based on optical classification. Remote Sens. Environ. 2011, 115, 725–737. [Google Scholar] [CrossRef]
- Lyu, H.; Wang, Y.; Jin, Q.; Shi, L.; Li, Y.; Wang, Q. Developing a semi-analytical algorithm to estimate particulate organic carbon (POC) levels in inland eutrophic turbid water based on MERIS images: A case study of Lake Taihu. Int. J. Appl. Earth Obs. Geoinf. 2017, 62, 69–77. [Google Scholar] [CrossRef]
- Ma, R.; Duan, H.; Lü, C.; Loiselle, S. Unusual links between inherent and apparent optical properties in shallow lakes, the case of Taihu Lake. Hydrobiologia 2011, 7, 49–158. [Google Scholar] [CrossRef]
- Qi, L.; Hu, C.; Duan, H.; Cannizzaro, J.; Ma, R. A novel MERIS algorithm to derive cyanobacterial phycocyanin pigment concentrations in a eutrophic lake: Theoretical basis and practical considerations. Remote Sens. Environ. 2014, 154, 298–317. [Google Scholar] [CrossRef]
- Mueller, J.L.; Morel, A.; Frouin, R.; Davis, C.; Arnone, R.; Carder, K.; Lee, Z.P.; Steward, R.G.; Hooker, S.; Holben, B.; et al. Ocean optics protocols for satellite ocean color sensor validation, Revision 4, Volume III: radiometric measurements and data analysis protocols. Natl. Aeronaut. Space Adm. Rep. 2003, 21621, 1–72. [Google Scholar]
- Mobley, C.D. Estimation of the remote-sensing reflectance from above-surface measurements. Appl. Optics. 1999, 38, 7442–7455. [Google Scholar] [CrossRef]
- Sun, D.; Li, Y.; Le, C.; Shi, K.; Huang, C.; Gong, S.; Yin, B. A semi-analytical approach for detecting suspended particulate composition in complex turbid inland waters (China). Remote Sens. Environ. 2013, 134, 92–99. [Google Scholar] [CrossRef]
- Zhang, F.; Li, J.; Qian, S.; Bing, Z.; Wu, C.; Wu, Y.; Wang, G.; Wang, S.; Lu, Z. Algorithms and Schemes for Chlorophyll a Estimation by Remote Sensing and Optical Classification for Turbid Lake Taihu, China. IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens. 2017, 8, 350–364. [Google Scholar] [CrossRef]
- Shen, Q.; Li, J.; Zhang, F.; Sun, X.; Li, J.; Li, W.; Zhang, B. Classification of Several Optically Complex Waters in China Using in Situ Remote Sensing Reflectance. Remote Sens. 2015, 7, 14731–14756. [Google Scholar] [CrossRef] [Green Version]
- Gordon, H.R.; Voss, K.J. MODIS Normalized Water-Leaving Radiance, Algorithm Theoretical Basis Document (MODIS 18); Version 5; University Miami: Coral Gables, FL, USA, 2004. [Google Scholar]
- Morel, A.; Gentili, B. Diffuse reflectance of oceanic waters. III. Implication of bidirectionality for the remote-sensing problem. Appl. Optics. 1996, 35, 4850–4862. [Google Scholar] [CrossRef] [PubMed]
- Morel, A.; Antoine, D.; Gentili, B. Bidirectional reflectance of oceanic waters: accounting for Raman emission and varying particle scattering phase function. Appl. Optics. 2002, 41, 6289–6306. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Hladik, C.M.; Huang, W.; Milla, K.; Edmiston, L.; Harwell, M.; Schalles, J. Detecting the spatial and temporal variability of chlorophyll-a concentration and total suspended solids in Apalachicola Bay, Florida using MODIS imagery. Int. J. Remote Sens. 2010, 31, 439–453. [Google Scholar] [CrossRef]
- Le, C.; Hu, C.; English, D.; Cannizzaro, J.; Chen, Z.; Feng, L.; Boler, R.; Kovach, C. Towards a long-term chlorophyll-a data record in a turbid estuary using MODIS observations. Prog. Oceanogr. 2013, 109, 90–103. [Google Scholar] [CrossRef]
- Nechad, B.; Ruddick, K.G.; Park, Y. Calibration and validation of a generic multisensor algorithm for mapping of total suspended matter in turbid waters. Remote Sens. Environ. 2010, 114, 854–866. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cruise Dates | Number of Stations | Cruise Dates | Number of Stations |
|---|---|---|---|
| Oct. 10, 2005 | 13 | Mar. 14–15, 2009 | 29 |
| Jan. 7–9, 2006 | 47 | Apr. 17–27, 2009 | 51 |
| Jul. 29 to Aug. 1, 2006 | 39 | Oct. 17–18, 2012 | 9 |
| Oct. 12–15, 2006 | 37 | May 11–13, 2013 | 40 |
| Jan. 7–9, 2007 | 50 | Jul. 21–22, 2014 | 8 |
| Apr. 25–27, 2007 | 40 | Oct. 26, 2014 | 14 |
| Parameter | Meaning | Setting |
|---|---|---|
| gain | Vicarious calibration coefficients | [gain(412), gain(443), gain(469), gain(488), gain(531), 0.9989, gain(555), gain(645), 0.9996, 1, 0.9997, gain(859), 1, 1, 1, 1] |
| aer_opt | aerosol calculation mode | −1: Multi-scattering with 2-band model selection |
| aer_wave_short | Lower wavelength used for aerosol model selection | 1240 |
| aer_wave_long | Upper wavelength used for aerosol model selection and aerosol concentration | 2130 |
| cloud_wave | Wavelength used to identify clouds | 2130 |
| cloud_thresh | Threshold used to identify clouds | 0.0175 |
| brdf_opt | Option for running bi-directional reflectance correction (BRDF) factor | 0 |
| resolution | Spatial resolution of outputs | 250 |
| Band (nm) | 412 | 443 | 469 | 488 | 531 | 555 | 645 | 859 |
|---|---|---|---|---|---|---|---|---|
| gain (This study) | 1.0383 | 1.0651 | 1.0915 | 1.0795 | 1.0930 | 1.1005 | 1.1220 | 1.0800 |
| gain (SeaDAS 7.2 default) | 0.9722 | 0.9872 | 1.0139 | 0.9923 | 0.9995 | 1.0014 | 1.0253 | 1.0184 |
| Approach | Band (nm) | Valid matchup numbers | Rrs range (sr−1) | ARE | RMSE (sr−1) | rRMSE | r |
|---|---|---|---|---|---|---|---|
| (1640, 2130) | 469 | 50 | 0.004–0.035 | 52% | 0.015 | 62% | 0.15 |
| 555 | 89 | 0.005–0.051 | 28% | 0.013 | 35% | 0.58 | |
| 645 | 92 | 0.002–0.054 | 24% | 0.010 | 31% | 0.75 | |
| 859 | 77 | 0.002–0.029 | 26% | 0.004 | 41% | 0.81 | |
| (1240, 2130)-Ite | 469 | 95 | 0.003–0.025 | 29% | 0.009 | 36% | 0.25 |
| 555 | 112 | 0.010–0.039 | 28% | 0.014 | 33% | 0.25 | |
| 645 | 112 | 0.007–0.035 | 26% | 0.012 | 31% | 0.67 | |
| 859 | 109 | 0002–0.030 | 40% | 0.006 | 96% | 0.69 | |
| (1240, 2130)-Cal (Total) | 469 | 98 | 0.002–0.033 | 33% | 0.009 | 40% | 0.58 |
| 555 | 129 | 0.014–0.048 | 15% | 0.007 | 20% | 0.70 | |
| 645 | 130 | 0.008–0.050 | 14% | 0.006 | 19% | 0.84 | |
| 859 | 122 | 0.002–0.028 | 22% | 0.003 | 29% | 0.90 | |
| (1240, 2130)-Cal (Val) | 469 | 25 | 0.002–0.031 | 39% | 0.010 | 47% | 0.78 |
| 555 | 51 | 0.014–0.048 | 20% | 0.008 | 24% | 0.77 | |
| 645 | 52 | 0.008–0.050 | 18% | 0.007 | 24% | 0.83 | |
| 859 | 46 | 0.002–0.028 | 28% | 0.003 | 35% | 0.88 |
| Band(nm) | 412 | 443 | 469 | 488 | 531 | 555 | 645 | 859 | Mean | |
|---|---|---|---|---|---|---|---|---|---|---|
| Approach | ||||||||||
| (1640, 2130) | 25% | 18% | 15% | 13% | 10% | 9% | 7% | 13% | 14% | |
| (1240, 2130)-Ite | 24% | 22% | 23% | 21% | 13% | 19% | 16% | 17% | 19% | |
| (1240, 2130)-Cal | 17% | 14% | 11% | 11% | 9% | 7% | 6% | 13% | 11% | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Yin, Z.; Lu, Z.; Ye, Y.; Zhang, F.; Shen, Q.; Zhang, B. Regional Vicarious Calibration of the SWIR-Based Atmospheric Correction Approach for MODIS-Aqua Measurements of Highly Turbid Inland Water. Remote Sens. 2019, 11, 1670. https://doi.org/10.3390/rs11141670
Li J, Yin Z, Lu Z, Ye Y, Zhang F, Shen Q, Zhang B. Regional Vicarious Calibration of the SWIR-Based Atmospheric Correction Approach for MODIS-Aqua Measurements of Highly Turbid Inland Water. Remote Sensing. 2019; 11(14):1670. https://doi.org/10.3390/rs11141670
Chicago/Turabian StyleLi, Junsheng, Ziyao Yin, Zhaoyi Lu, Yuntao Ye, Fangfang Zhang, Qian Shen, and Bing Zhang. 2019. "Regional Vicarious Calibration of the SWIR-Based Atmospheric Correction Approach for MODIS-Aqua Measurements of Highly Turbid Inland Water" Remote Sensing 11, no. 14: 1670. https://doi.org/10.3390/rs11141670