Lunar Calibration for ASTER VNIR and TIR with Observations of the Moon in 2003 and 2017

 , and
, and
Abstract
:
1. Introduction
2. Lunar Observations and Data
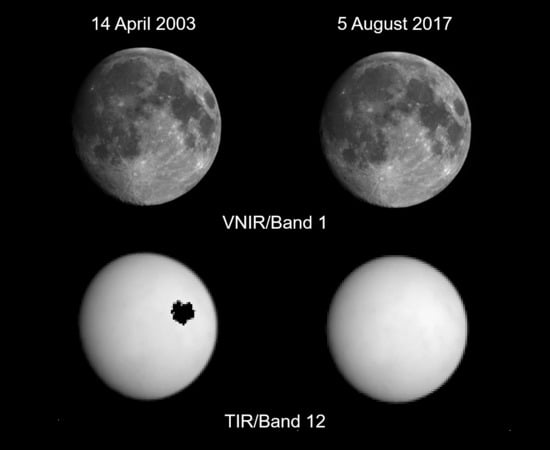
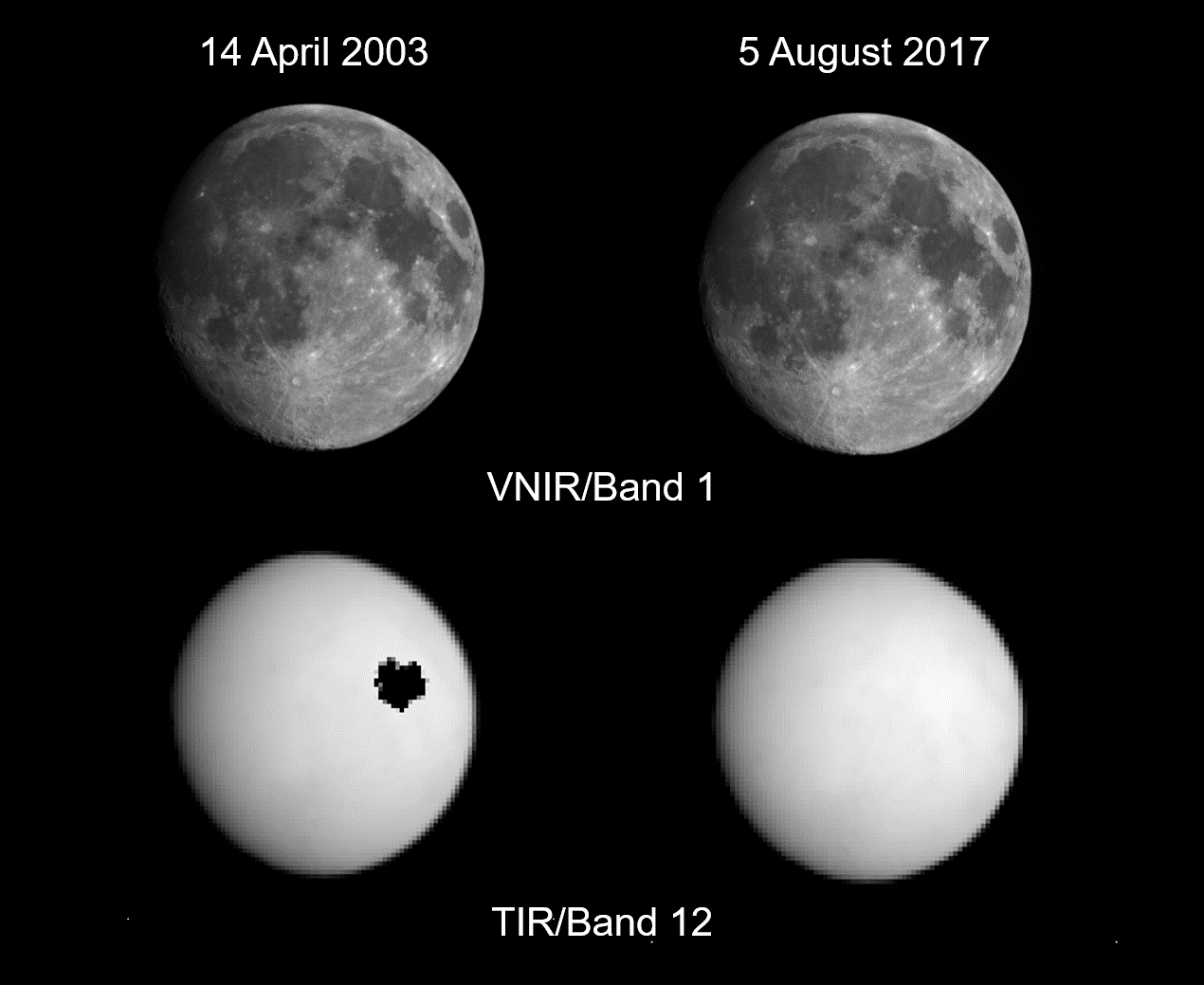
2.1. Lunar Images Taken by the Visible and Near Infrared Bands
2.2. Lunar Images Taken by the Thermal Infrarred Bands
3. Lunar Calibration for the Visible and Near Infrared Bands: Evaluating the Sensitivity Degradation
3.1. Bias Reduction by Deepspace Observations
3.2. Sensitivity Degradation from 2003 to 2017
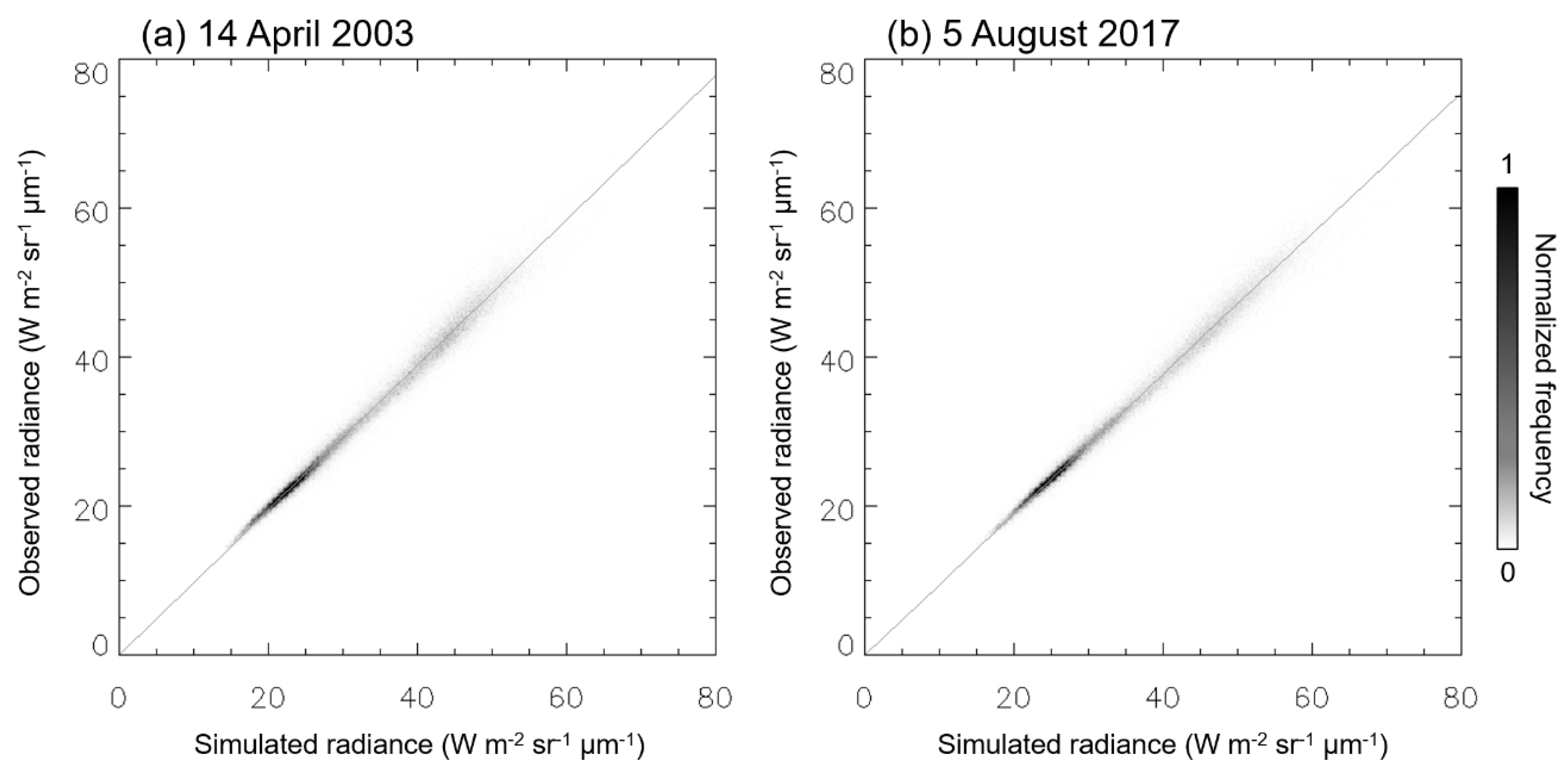
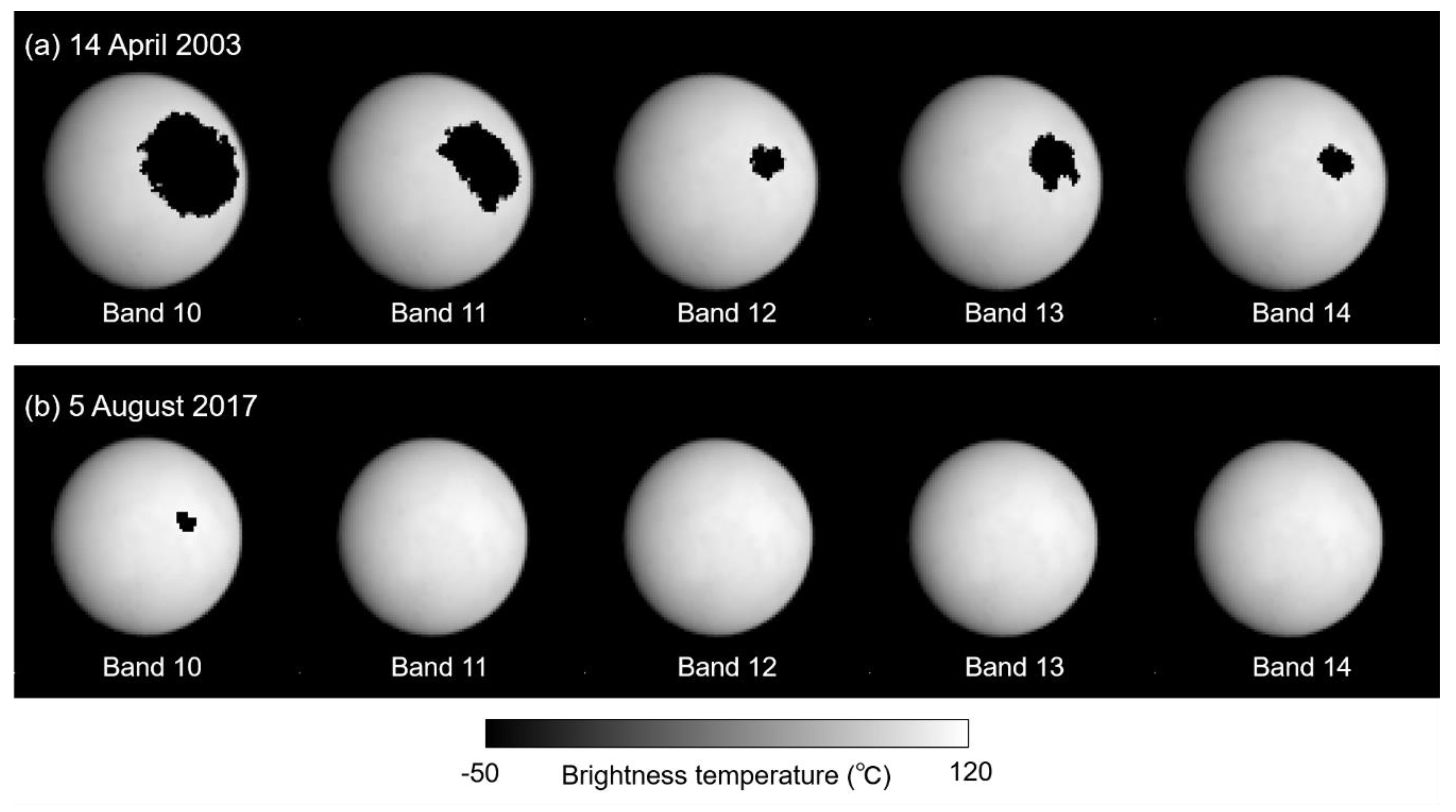
4. Lunar Calibration for the Thermal Infrared Bands: Validation of the Measured Sensitivity Degradation
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A


Appendix B

Appendix C
References
- Yamaguchi, Y.; Kahle, A.B.; Tsu, H.; Kawakami, T.; Pniel, M. Overview of advanced spaceborne thermal emission and reflection radiometer (ASTER). IEEE Trans. Geosci. Remote Sens. 1998, 36, 1062–1071. [Google Scholar] [CrossRef]
- Abram, M.; Yamaguchi, Y. Twenty Years of ASTER Contributions to Lithologic Mapping and Mineral Exploration. Remote Sens. 2019, 11, 1394. [Google Scholar] [CrossRef]
- Arai, K.; Ohgi, N.; Sakuma, F.; Kikuchi, M.; Tsuchida, S.; Inada, H. Onboard Trend Analysis of Onboard Calibration Data of Terra/ASTER/VNIR and One of the Suspected Causes of Sensitivity Degradation. IJAS 2011, 2, 71–83. [Google Scholar]
- Tsuchida, S.; Yamamoto, H.; Kamei, A. Long-term vicarious calibration of ASTER VNIR bands. In Proceedings of the 52nd Conference of the Remote Sensing Society of Japan, Tokyo, Japan, 23 May 2012; pp. 85–86. [Google Scholar]
- Thome, K.; Arai, K.; Tsuchida, S.; Biggar, S. Vicarious calibration of ASTER via the reflectance-based approach. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3285–3295. [Google Scholar] [CrossRef]
- Tonooka, H.; Palluconi, F.D.; Hook, S.J.; Matsunaga, T. Vicarious Calibration of ASTER Thermal Infrared Bands. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2733–2746. [Google Scholar] [CrossRef]
- Yamamoto, H.; Kamei, A.; Nakamura, R.; Tsuchida, S. Long-term cross-calibration of the Terra ASTER and MODIS over the CEOS calibration sites. In Earth Observing Systems XVI; International Society for Optics and Photonics: Bellingham, WA, USA, 2011; Volume 8153, p. 815318. [Google Scholar]
- Obata, K.; Tsuchida, S.; Yamamoto, H.; Thome, K. Cross-Calibration between ASTER and MODIS Visible to Near-Infrared Bands for Improvement of ASTER Radiometric Calibration. Sensors 2017, 17, 1793. [Google Scholar] [CrossRef]
- Tachikawa, T. ASTER Science Team Meeting. Earth Obs. 2014, 26, 18–21. [Google Scholar]
- Obata, K.; Tsuchida, S.; Iwao, K. Inter-Band Radiometric Comparison and Calibration of ASTER Visible and Near-Infrared Bands. Remote Sens. 2015, 7, 15140–15160. [Google Scholar] [CrossRef]
- Wagner, S.C.; Hewison, T.; Stone, T.; Lachérade, S.; Fougnie, B.; Xiong, X. A summary of the joint GSICS—CEOS/IVOS lunar calibration workshop: Moving towards intercalibration using the Moon as a transfer target. In Sensors, Systems, and Next-Generation Satellites XIX; International Society for Optics and Photonics: Bellingham, WA, USA, 2015; p. 96390Z. [Google Scholar]
- Eplee, R.E.; Barnes, R.A.; Patt, F.S.; Meister, G.; McClain, C.R. SeaWiFS lunar calibration methodology after six years on orbit. In Earth Observing Systems IX; International Society for Optics and Photonics: Bellingham, WA, USA, 2004; pp. 1–13. [Google Scholar]
- Eplee, R.E.; Sun, S.-Q.; Meister, G.; Patt, F.S.; Xiong, X.; McClain, C.R. Cross calibration of SeaWiFS and MODIS using on-orbit observations of the Moon. Appl. Opt. 2012, 51, 8702–8730. [Google Scholar] [CrossRef]
- Kouyama, T.; Nakamura, R.; Kato, S.; Miyashita, N. One-year Lunar Calibration Result of Hodoyoshi-1, Moon as an Ideal Target for Small Satellite Radiometric Calibration. In Proceedings of the Small Satellite Conference, Logan, UT, USA, 4–9 August 2018. SSC18-III-04. [Google Scholar]
- Choi, T.; Shao, X.; Cao, C.; Weng, F. Radiometric Stability Monitoring of the Suomi NPP Visible Infrared Imaging Radiometer Suite (VIIRS) Reflective Solar Bands Using the Moon. Remote Sens. 2016, 8, 15. [Google Scholar] [CrossRef]
- Stone, T. Radiometric calibration stability and intercalibration of solar-band instruments in orbit using the Moon. In Earth Observing Systems XIII; International Society for Optics and Photonics: Bellingham, WA, USA, 2008; Volume 7081, p. 70810X. [Google Scholar]
- Kieffer, H.H.; Stone, T.C. The spectral irradiance of the Moon. Astron. J. 2005, 129, 2887–2901. [Google Scholar] [CrossRef]
- Yamamoto, S.; Matsunaga, T.; Ogawa, Y.; Nakamura, R.; Yokota, Y.; Ohtake, M.; Haruyama, J.; Morota, T.; Honda, C.; Hiroi, T.; et al. Preflight and In-Flight Calibration of the Spectral Profiler on Board SELENE (Kaguya). IEEE Trans. Geosci. Remote Sens. 2011, 49, 4660–4676. [Google Scholar] [CrossRef]
- Yokota, Y.; Matsunaga, T.; Ohtake, M.; Haruyama, J.; Nakamura, R.; Yamamoto, S.; Ogawa, Y.; Morota, T.; Honda, C.; Saiki, K.; et al. Lunar photometric properties at wavelengths 0.5–1.6 μm acquired by SELENE Spectral Profiler and their dependency on local albedo and latitudinal zones. Icarus 2011, 215, 639–660. [Google Scholar] [CrossRef]
- Kouyama, T.; Yokota, Y.; Ishihara, Y.; Nakamura, R.; Yamamoto, S.; Matsunaga, T. Development of an application scheme for the SELENE/SP lunar reflectance model for radiometric calibration of hyperspectral and multispectral Sensors. Planet. Space Sci. 2016, 214, 76–83. [Google Scholar] [CrossRef]
- Williams, J.P.; Piage, D.A.; Greenhagen, B.T.; Sefton-Nash, E. The global surface temperatures of the Moon as measured by the Diviner Lunar Radiometer Experiment. Icarus 2017, 283, 300–325. [Google Scholar] [CrossRef]
- ASTER Science Office ASTER SWIR Data Status Report. Available online: http://www.aster.jspacesystems.or.jp/en/about_aster/swir_en.pdf (accessed on 7 October 2019).
- Kieffer, H.H. Photometric stability of the lunar surface. Icarus 1997, 130, 323–327. [Google Scholar] [CrossRef]
- Ogohara, K.; Kouyama, T.; Yamamoto, H.; Sato, N.; Takagi, M.; Imamura, T. Automated cloud tracking system for the Akatsuki Venus Climate Orbiter data. Icarus 2012, 217, 661–668. [Google Scholar] [CrossRef]
- Bruegge, C.J.; Abdou, W.; Diner, D.J.; Gaitley, B.J.; Helmlinger, M.; Kahn, R.A.; Martonchik, J.V. Validating the MISR radiometric scale for the ocean aerosol science communities. In Proceedings of the International Workshop on Radiometric and Geometric Calibration, Gulfport, MS, USA, 2 December 2004. [Google Scholar]
- Sakuma, F.; Kikuchi, M.; Inada, H.; Akagi, S.; Ono, H. Onboard Calibration of the ASTER Instrument over Twelve Year. In Proceedings of the International Society for Optics and Photonics, Bellingham, WA, USA, 19 November 2012; Volume 8533, p. 853305. [Google Scholar]
- Suzuki, H.; Yamada, M.; Kouyama, T.; Tatsumi, E.; Kameda, S.; Honda, R.; Sawada, H.; Ogawa, N.; Morota, T.; Honda, C.; et al. Initial inflight calibration for Hayabusa2 optical navigation camera (ONC) for science observations of asteroid Ryugu. Icarus 2018, 300, 341–359. [Google Scholar] [CrossRef]
- Tatsumi, E.; Kouyama, T.; Suzuki, H.; Yamada, M.; Sakatani, N.; Kameda, S.; Yokota, Y.; Honda, R.; Morota, T.; Moroi, K.; et al. Updated inflight calibration of Hayabusa2’s optical navigation camera (ONC) for scientific observations during the cruise phase. Icarus 2019, 325, 153–195. [Google Scholar] [CrossRef]
- Biggar, S.; Slater, P.; Gellman, D. Uncertainties in the in-flight calibration of sensors with reference to measured ground sites in the 0.4–1.1 m range. Remote Sens. Environ. 1994, 48, 245–252. [Google Scholar] [CrossRef]
- Helder, D.; Thome, K.J.; Mishra, N.; Chander, G.; Xiong, X.; Angal, A.; Choi, T. Absolute Radiometric Calibration of Landsat Using a Pseudo Invariant Calibration Site. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1360–1369. [Google Scholar] [CrossRef]
- ERSDAC. Algorithm Theoretical Basis Document for ASTER Level-1 Data Processing (Ver. 3.0). Available online: https://eospso.nasa.gov/sites/default/files/atbd/atbd-ast-01.pdf (accessed on 18 November 2019).
- Wehrli, C. Spectral Solar Irradiance Data, WMO ITD 149; WMO: Geneva, Switzerland, 1986. [Google Scholar]
- Pieters, C.M. The Moon as a Spectral Calibration Standard Enabled by Lunar Samples: The Clementine Example. In Proceedings of the New Views of the Moon II: Understanding the Moon through the Integration of Diverse Datasets, Flagstaff, AZ, USA, 22–24 September 1999; pp. 47–48. [Google Scholar]
- Pieters, C.M.; Mustard, J.F. Exploration of crustal/mantal material for the Earth and Moon using reflectance spectroscopy. Remote Sens. Environ. 1998, 24, 151–178. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| VNIR | TIR | |
|---|---|---|
| Wavelengths | Band 1: 520–600 nm Band 2 630–690 nm Band 3N/3B: 760–860 nm | Band 10: 8125–8475 nm Band 11: 8475–8825 nm Band 12: 8925–9275 nm Band 13: 10250–10950 nm Band 14: 10950–11650 nm |
| Ground sampling distance | 15 m | 90 m |
| Swath width | 60 km | 60 km |
| Bit depth | 8 bits | 12 bits |
| Spatial resolution for the Moon (from a 384,400 km distance) | 8.2 km | 25 km |
| 14 April 2003 | 5 August 2017 | |
|---|---|---|
| Phase angle | −27.7° | −20.3° |
| Sub solar latitude | −0.9° | −0.3° |
| Sub solar longitude | 22.1° | 17.5° |
| Sub observer latitude | −6.8° | −4.2° |
| Sub observer longitude | −5.1° | −2.6° |
| Sub observer local time | 10.2 h | 10.7 h |
| Distance: Sun-Moon | 1.005 AU | 1.017 AU |
| Distance: Moon-Terra | 359,021 km | 394,856 km |
| Calibration Methods | ROLO Model | SP Model (Nominal) | SP Model (Whole Moon) |
|---|---|---|---|
| Band 1 | 3.0% | 3.1% | 3.6% |
| Band 2 | 5.4% | 5.2% | 5.6% |
| Band 3N | 6.3% | 5.8% | 6.3% |
| Band 3B | 3.0% | 3.2% | 3.9% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kouyama, T.; Kato, S.; Kikuchi, M.; Sakuma, F.; Miura, A.; Tachikawa, T.; Tsuchida, S.; Obata, K.; Nakamura, R. Lunar Calibration for ASTER VNIR and TIR with Observations of the Moon in 2003 and 2017. Remote Sens. 2019, 11, 2712. https://doi.org/10.3390/rs11222712
Kouyama T, Kato S, Kikuchi M, Sakuma F, Miura A, Tachikawa T, Tsuchida S, Obata K, Nakamura R. Lunar Calibration for ASTER VNIR and TIR with Observations of the Moon in 2003 and 2017. Remote Sensing. 2019; 11(22):2712. https://doi.org/10.3390/rs11222712
Chicago/Turabian StyleKouyama, Toru, Soushi Kato, Masakuni Kikuchi, Fumihiro Sakuma, Akira Miura, Tetsushi Tachikawa, Satoshi Tsuchida, Kenta Obata, and Ryosuke Nakamura. 2019. "Lunar Calibration for ASTER VNIR and TIR with Observations of the Moon in 2003 and 2017" Remote Sensing 11, no. 22: 2712. https://doi.org/10.3390/rs11222712