Mapping Water Surface Elevation and Slope in the Mississippi River Delta Using the AirSWOT Ka-Band Interferometric Synthetic Aperture Radar

 , , , and
, , , and
Abstract
:
1. Introduction
2. Data
2.1. AirSWOT Overview
2.2. In Situ Water Level Data
3. Methods
3.1. AirSWOT Phase Calibration Procedure for Coastal Wetlands
3.2. Filtering and Averaging of AirSWOT Elevation Data
4. Results and Discussion
4.1. Water Surface Elevation
4.2. Measuring Water Level Change
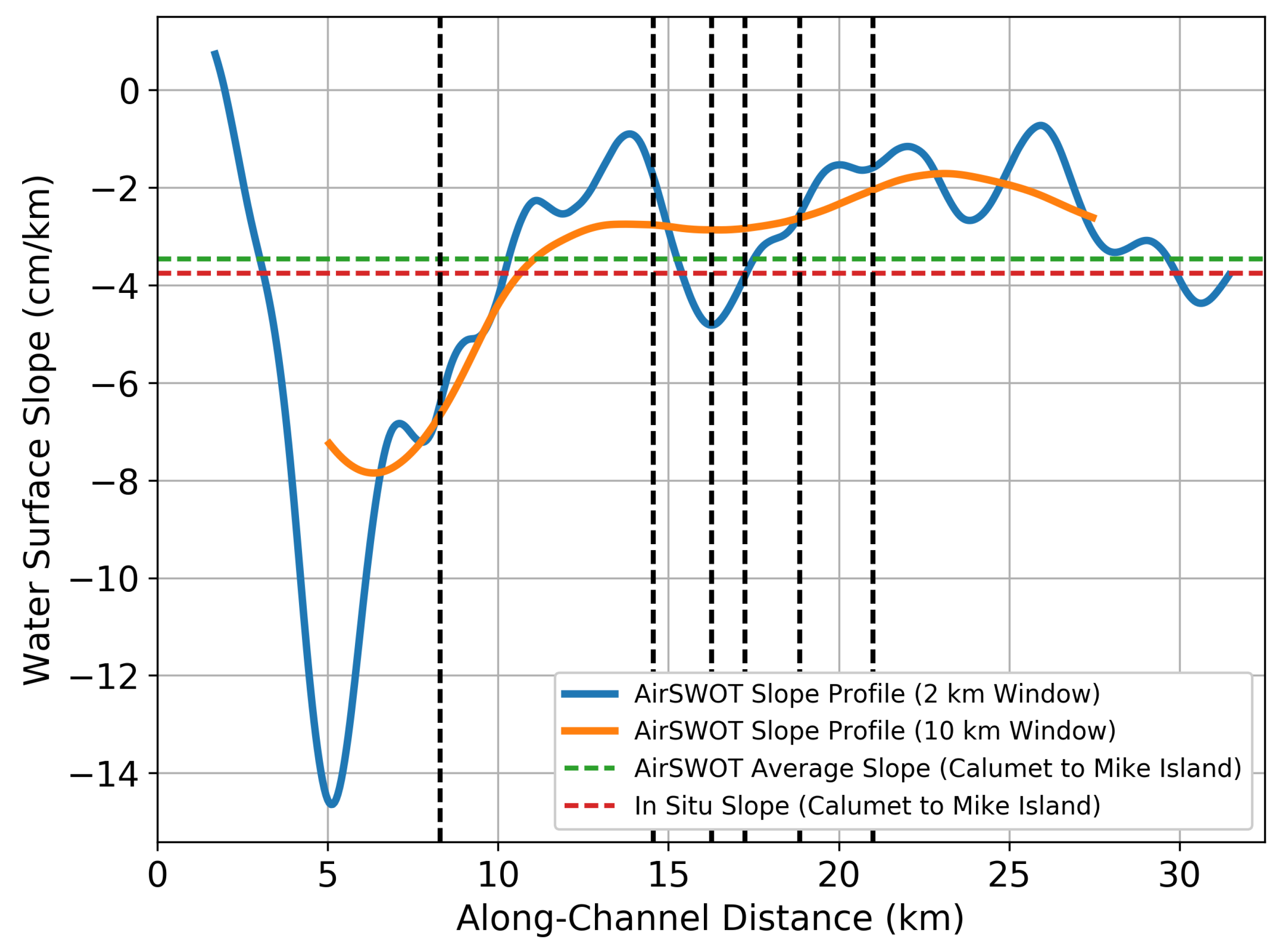
4.3. Water Surface Slope in the Wax Lake Outlet
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AirSWOT | Airborne Surface Water and Ocean Topography |
| CRMS | Coastwide Reference Monitoring System |
| DEM | Digital Elevation Model |
| GCP | Ground Control Point |
| InSAR | Interferometric Synthetic Aperture Radar |
| KaSPAR | Ka-band SWOT Phenomenology Airborne Radar |
| LSU | Louisiana State University |
| MAD | Median Absolute Deviation |
| MAE | Mean Absolute Error |
| NASA | National Aeronautics and Space Administration |
| NOAA | National Oceanic and Atmospheric Administration |
| RMSE | Root Mean Square Error |
| SAR | Synthetic Aperture Radar |
| SWOT | Surface Water and Ocean Topography |
| USGS | U.S. Geological Survey |
| WSE | Water Surface Elevation |
| WSS | Water Surface Slope |
References
- Gleick, P.H. Water Use. Ann. Rev. Environ. Resour. 2003, 28, 275–314. [Google Scholar] [CrossRef]
- Famiglietti, J.S.; Rodell, M. Water in the Balance. Science 2013, 340, 1300–1301. [Google Scholar] [CrossRef] [PubMed]
- Hannah, D.M.; Demuth, S.; van Lanen, H.A.J.; Looser, U.; Prudhomme, C.; Rees, G.; Stahl, K.; Tallaksen, L.M. Large-scale river flow archives: Importance, current status and future needs. Hydrol. Process. 2011, 25, 1191–1200. [Google Scholar] [CrossRef]
- Alsdorf, D.E.; Rodríguez, E.; Lettenmaier, D.P. Measuring surface water from space. Rev. Geophys. 2007, 45, 1–24. [Google Scholar] [CrossRef]
- Durand, M.; Rodriguez, E.; Alsdorf, D.E.; Trigg, M. Estimating River Depth From Remote Sensing Swath Interferometry Measurements of River Height, Slope, and Width. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 20–31. [Google Scholar] [CrossRef]
- Smith, L.C.; Isacks, B.L.; Forster, R.R.; Bloom, A.L.; Preuss, I. Estimation of discharge from braided glacial rivers using ERS 1 synthetic aperture radar: First results. Water Resour. Res. 1995, 31, 1325–1329. [Google Scholar] [CrossRef]
- Smith, L.C.; Isacks, B.L.; Bloom, A.L.; Murray, A.B. Estimation of Discharge From Three Braided Rivers Using Synthetic Aperture Radar Satellite Imagery: Potential Application to Ungaged Basins. Water Resour. Res. 1996, 32, 2021–2034. [Google Scholar] [CrossRef]
- Alsdorf, D.E.; Smith, L.C.; Melack, J.M. Amazon floodplain water level changes measured with interferometric SIR-C radar. IEEE Trans. Geosci. Remote Sens. 2001, 39, 423–431. [Google Scholar] [CrossRef]
- Lu, Z.; Kwoun, O. Radarsat-1 and ERS InSAR Analysis Over Southeastern Coastal Louisiana: Implications for Mapping Water-Level Changes Beneath Swamp Forests. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2167–2184. [Google Scholar] [CrossRef]
- Biancamaria, S.; Hossain, F.; Lettenmaier, D.P. Forecasting transboundary river water elevations from space. Geophys. Res. Lett. 2011, 38. [Google Scholar] [CrossRef]
- Hong, S.; Wdowinski, S. Multitemporal Multitrack Monitoring of Wetland Water Levels in the Florida Everglades Using ALOS PALSAR Data With Interferometric Processing. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1355–1359. [Google Scholar] [CrossRef]
- Hossain, F.; Siddique-E-Akbor, A.H.; Mazumder, L.C.; ShahNewaz, S.M.; Biancamaria, S.; Lee, H.; Shum, C.K. Proof of Concept of an Altimeter-Based River Forecasting System for Transboundary Flow Inside Bangladesh. IEEE J. Sel. Top. App. Earth Obs. Remote Sens. 2014, 7, 587–601. [Google Scholar] [CrossRef]
- Okeowo, M.A.; Lee, H.; Hossain, F.; Getirana, A. Automated Generation of Lakes and Reservoirs Water Elevation Changes From Satellite Radar Altimetry. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3465–3481. [Google Scholar] [CrossRef]
- Rosen, P.A.; Hensley, S.; Joughin, I.R.; Li, F.K.; Madsen, S.N.; Rodriguez, E.; Goldstein, R.M. Synthetic aperture radar interferometry. Proc. IEEE 2000, 88, 333–382. [Google Scholar] [CrossRef]
- Fu, L.L.; Alsdorf, D.; Rodriguez, E.; Morrow, R.; Mognard, N.; Lambin, J.; Vaze, P.; Lafon, T. The SWOT (Surface Water and Ocean Topography) mission: Spaceborne radar interferometry for oceanographic and hydrological applications. In Proceedings of the OCEANOBS’09 Conference, Venice, Italy, 21–25 September 2009. [Google Scholar]
- Durand, M.; Fu, L.; Lettenmaier, D.P.; Alsdorf, D.E.; Rodriguez, E.; Esteban-Fernandez, D. The Surface Water and Ocean Topography Mission: Observing Terrestrial Surface Water and Oceanic Submesoscale Eddies. Proc. IEEE 2010, 98, 766–779. [Google Scholar] [CrossRef]
- Neeck, S.P.; Lindstrom, E.J.; Vaze, P.V.; Fu, L.L. Surface Water and Ocean Topography (SWOT) mission. In Sensors, Systems, and Next-Generation Satellites XVI; International Society for Optics and Photonics: Bellingham, DC, USA, 2012; Volume 8533, p. 85330G. [Google Scholar]
- Biancamaria, S.; Lettenmaier, D.P.; Pavelsky, T.M. The SWOT mission and its capabilities for land hydrology. In Remote Sensing and Water Resources; Springer: Cham, Switzerland, 2016; pp. 117–147. [Google Scholar]
- Biancamaria, S.; Andreadis, K.M.; Durand, M.; Clark, E.A.; Rodriguez, E.; Mognard, N.M.; Alsdorf, D.E.; Lettenmaier, D.P.; Oudin, Y. Preliminary Characterization of SWOT Hydrology Error Budget and Global Capabilities. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 6–19. [Google Scholar] [CrossRef]
- Fjørtoft, R.; Gaudin, J.M.; Pourthie, N.; Lalaurie, J.C.; Mallet, A.; Nouvel, J.F.; Martinot-Lagarde, J.; Oriot, H.; Borderies, P.; Ruiz, C.; et al. KaRIn on SWOT: Characteristics of near-nadir Ka-band interferometric SAR imagery. IEEE Trans. Geosci. Remote Sens. 2013, 52, 2172–2185. [Google Scholar] [CrossRef]
- Rodriguez, E. Surface Water and Ocean Topography Mission (SWOT): Science Requirements Document. SWOT NASA/JPL Project, Pasadena, Calif. Available online: https://swot.jpl.nasa.gov/files/swot/SRD_021215.pdf (accessed on 1 November 2019).
- Pavelsky, T.M.; Durand, M.T.; Andreadis, K.M.; Beighley, R.E.; Paiva, R.C.; Allen, G.H.; Miller, Z.F. Assessing the potential global extent of SWOT river discharge observations. J. Hydrol. 2014, 519, 1516–1525. [Google Scholar] [CrossRef]
- Moller, D.; Rodriguez, E.; Carswell, J.; Esteban-Fernandez, D. AirSWOT—A calibration/validation platform for the SWOT mission. In Proceedings of the International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011. [Google Scholar]
- Moller, D.; Esteban-Fernandez, D. Near-Nadir Ka-band Field Observations of Freshwater Bodies. In Remote Sensing of the Terrestrial Water Cycle; American Geophysical Union (AGU): Washington, DC, USA, 2014; Chapter 9; pp. 143–155. [Google Scholar] [CrossRef]
- Wu, X.; Hensley, S.; Rodriguez, E.; Moller, D.; Muellerschoen, R.; Michel, T. Near nadir Ka-band sar interferometry: SWOT airborne experiment. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 2681–2684. [Google Scholar] [CrossRef]
- Moller, D.; Farquharson, G.; Esteban-Fernandez, D. Assessment of near-nadir correlation characteristics over water bodies using interferometric SAR: Implications for the SWOT mission. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 3219–3222. [Google Scholar] [CrossRef]
- Altenau, E.H.; Pavelsky, T.M.; Moller, D.; Lion, C.; Pitcher, L.H.; Allen, G.H.; Bates, P.D.; Calmant, S.; Durand, M.; Smith, L.C. AirSWOT measurements of river water surface elevation and slope: Tanana River, AK. Geophys. Res. Lett. 2017, 44, 181–189. [Google Scholar] [CrossRef]
- Altenau, E.H.; Pavelsky, T.M.; Moller, D.; Pitcher, L.H.; Bates, P.D.; Durand, M.T.; Smith, L.C. Temporal variations in river water surface elevation and slope captured by AirSWOT. Remote Sens. Environ. 2019, 224, 304–316. [Google Scholar] [CrossRef]
- Pitcher, L.H.; Pavelsky, T.M.; Smith, L.C.; Moller, D.K.; Altenau, E.H.; Allen, G.H.; Lion, C.; Butman, D.; Cooley, S.W.; Fayne, J.V.; et al. AirSWOT InSAR mapping of surface water elevations and hydraulic gradients across the Yukon Flats Basin, Alaska. Water Resour. Res. 2019, 55, 937–953. [Google Scholar] [CrossRef]
- Tuozzolo, S.; Lind, G.; Overstreet, B.; Mangano, J.; Fonstad, M.; Hagemann, M.; Frasson, R.P.M.; Larnier, K.; Garambois, P.A.; Monnier, J.; et al. Estimating River Discharge With Swath Altimetry: A Proof of Concept Using AirSWOT Observations. Geophys. Res. Lett. 2019, 46, 1459–1466. [Google Scholar] [CrossRef]
- Fayne, J.V.; Smith, L.C.; Pitcher, L.H.; Kyzivat, E.D.; Cooley, S.W.; Cooper, M.G.; Denbina, M.; Chen, A.; Chen, C.; Pavelsky, T.M. First Airborne Observations of Arctic-Boreal Water Surface Elevations from AirSWOT Ka-Band InSAR and LVIS LiDAR. Environ. Res. Lett. 2019, 14, 080201. [Google Scholar]
- Turki, I.; Laignel, B.; Chevalier, L.; Costa, S.; Massei, N. On the Investigation of the Sea-Level Variability in Coastal Zones Using SWOT Satellite Mission: Example of the Eastern English Channel (Western France). IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 1564–1569. [Google Scholar] [CrossRef]
- Chevalier, L.; Desroches, D.; Laignel, B.; Fjørtoft, R.; Turki, I.; Allain, D.; Lyard, F.; Blumstein, D.; Salameh, E. High-Resolution SWOT Simulations of the Macrotidal Seine Estuary in Different Hydrodynamic Conditions. IEEE Geosci. Remote Sens. Lett. 2019, 16, 5–9. [Google Scholar] [CrossRef]
- Mitra, S.; Wassmann, R.; Vlek, P.L. An appraisal of global wetland area and its organic carbon stock. Curr. Sci. 2005, 88, 25–35. [Google Scholar]
- Mitsch, W.; Gosselink, J. Wetlands; Wiley: Hoboken, NJ, USA, 2007. [Google Scholar]
- Milliman, J.D.; Meade, R.H. World-Wide Delivery of River Sediment to the Oceans. J. Geol. 1983, 91, 1–21. [Google Scholar] [CrossRef]
- Kyzivat, E.D.; Smith, L.; Pitcher, L.; Fayne, J.; Cooley, S.; Cooper, M.; Topp, S.; Langhorst, T.; Harlan, M.; Horvat, C.; et al. A High-Resolution Airborne Color-Infrared Camera Water Mask for the NASA ABoVE Campaign. Remote Sens. 2019, 11, 2163. [Google Scholar] [CrossRef]
- Thomas, N.; Simard, M.; Castañeda-Moya, E.; Byrd, K.; Windham-Myers, L.; Bevington, A.; Twilley, R.R. High-resolution mapping of biomass and distribution of marsh and forested wetlands in southeastern coastal Louisiana. Int. J. Appl. Earth Obs. Geoinf. 2019, 80, 257–267. [Google Scholar] [CrossRef]
- Goldstein, R.M.; Zebker, H.A. Interferometric radar measurement of ocean surface currents. Nature 1987, 328, 707–709. [Google Scholar] [CrossRef]
- Romeiser, R.; Breit, H.; Eineder, M.; Runge, H. Demonstration of current measurements from space by along-track SAR interferometry with SRTM data. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Toronto, ON, Canada, 24–28 June 2002; Volume 1, pp. 158–160. [Google Scholar] [CrossRef]
- Steyer, G.D.; Sasser, C.E.; Visser, J.M.; Swenson, E.M.; Nyman, J.A.; Raynie, R.C. A Proposed Coast-Wide Reference Monitoring System for Evaluating Wetland Restoration Trajectories in Louisiana. Environ. Monit. Assess. 2003, 81, 107–117. [Google Scholar] [CrossRef] [PubMed]
- Perrien, S.; Personal Correspondence with USGS Baton Rouge Field Office. Private Communication, 2019.
- White, S.A. VDatum: Vertical Datum Transformation Tool; Presented to the Hydrographic Services Review Panel: 2013. Available online: https://vdatum.noaa.gov/download/presentations/vdatum_webinar_2013.pdf (accessed on 1 November 2019).
- Raney, R.K.; Vachon, P.W. A phase preserving SAR processor. In Proceedings of the IGARSS ’89 and Canadian Symposium on Remote Sensing, 12th, Vancouver, BC, Canada, 10–14 July 1989; Volume 1, pp. 2588–2591. [Google Scholar]
- Freeman, A. SAR calibration: An overview. IEEE Trans. Geosci. Remote Sens. 1992, 30, 1107–1121. [Google Scholar] [CrossRef]
- Bickel, D.L.; Hensley, W.H. Interferometric SAR phase difference calibration: Methods and results. In Proceedings of the IGARSS ’94-1994 IEEE International Geoscience and Remote Sensing Symposium, Pasadena, CA, USA, 8–12 August 1994; Volume 4, pp. 2259–2262. [Google Scholar] [CrossRef] [Green Version]
- Gatti, G.; Tebaldini, S.; Mariotti d’Alessandro, M.; Rocca, F. ALGAE: A Fast Algebraic Estimation of Interferogram Phase Offsets in Space-Varying Geometries. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2343–2353. [Google Scholar] [CrossRef]
- SWOT Project. SWOT Calibration/Validation Plan (Initial Release). Available online: https://swot.jpl.nasa.gov/docs/D-75724_SWOT_Cal_Val_Plan_Initial_20180129u.pdf (accessed on 1 November 2019).
- Waite, W.P.; MacDonald, H.C. “Vegetation Penetration” with K-Band Imaging Radars. IEEE Trans. Geosci. Electron. 1971, 9, 147–155. [Google Scholar] [CrossRef]
- Treuhaft, R.N.; Madsen, S.N.; Moghaddam, M.; van Zyl, J.J. Vegetation characteristics and underlying topography from interferometric radar. Radio Sci. 1996, 31, 1449–1485. [Google Scholar] [CrossRef]
- Askne, J.; Dammert, P.; Ulander, L.; Smith, G. C-band repeat-pass interferometric SAR observations of the forest. IEEE Trans. Geosci. Remote Sens. 1997, 35, 25–35. [Google Scholar] [CrossRef]
- Rufino, G.; Moccia, A.; Esposito, S. DEM generation by means of ERS tandem data. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1905–1912. [Google Scholar] [CrossRef]
- Hueso Gonzalez, J.; Bachmann, M.; Krieger, G.; Fiedler, H. Development of the TanDEM-X Calibration Concept: Analysis of Systematic Errors. IEEE Trans. Geosci. Remote Sens. 2010, 48, 716–726. [Google Scholar] [CrossRef] [Green Version]
- Zebker, H.A.; Hensley, S.; Shanker, P.; Wortham, C. Geodetically Accurate InSAR Data Processor. IEEE Trans. Geosci. Remote Sens. 2010, 48, 4309–4321. [Google Scholar] [CrossRef]
- Leys, C.; Ley, C.; Klein, O.; Bernard, P.; Licata, L. Detecting outliers: Do not use standard deviation around the mean, use absolute deviation around the median. J. Exp. Soc. Psychol. 2013, 49, 764–766. [Google Scholar] [CrossRef] [Green Version]
- Savitzky, A.; Golay, M.J.E. Smoothing and Differentiation of Data by Simplified Least Squares Procedures. Anal. Chem. 1964, 36, 1627–1639. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aircraft Type | Beechcraft Super King Air B200 |
| Aircraft Altitude | ≈8900–9000 m |
| Center Frequency | 35.75 GHz |
| Wavelength | 0.84 cm |
| Polarization | VV |
| Nominal Incidence Angle Range | 4– |
| Nominal Swath Width | 4 km |
| Effective Swath Width | 3 km |
| Azimuth Processing Beamwidth | |
| Pulse Repetition Frequency | 1729 Hz |
| Range Bandwidth (Transmitted) | 80 MHz |
| Slant Range Resolution | ≈2 m |
| Along-Track Looks | 50 |
| Along-Track Baseline | 50 cm |
| Cross-Track Baseline | 50 cm |
| Station Name | Org. | Latitude () | Longitude () | Vertical Datum Conversion |
|---|---|---|---|---|
| Wax Lake Outlet at Calumet | USGS | 29.698 | −91.373 | Published Offset |
| Caillou Bay | USGS | 29.078 | −90.871 | Published Offset |
| Avoca Island Cutoff | USGS | 29.539 | −91.246 | Published Offset |
| Mike Island | LSU | 29.496 | −91.444 | Surveyed Offset |
| Eugene Island | NOAA | 29.367 | −91.383 | NOAA VDatum |
| Amerada Pass | NOAA | 29.450 | −91.338 | NOAA VDatum |
| 0303 | CRMS | 29.241 | −91.069 | N/A |
| 0305 | CRMS | 29.390 | −91.198 | N/A |
| 0311 | CRMS | 29.214 | −90.792 | N/A |
| 0329 | CRMS | 29.480 | −91.105 | N/A |
| 0345 | CRMS | 29.171 | −90.762 | N/A |
| 0347 | CRMS | 29.161 | −90.701 | N/A |
| 0354 | CRMS | 29.332 | −91.009 | N/A |
| 0369 | CRMS | 29.295 | −90.695 | N/A |
| 0374 | CRMS | 29.157 | −90.793 | N/A |
| 0376 | CRMS | 29.124 | −90.857 | N/A |
| 0377 | CRMS | 29.232 | −91.007 | N/A |
| 0383 | CRMS | 29.208 | −90.948 | N/A |
| 0396 | CRMS | 29.343 | −90.886 | N/A |
| 0421 | CRMS | 29.172 | −90.824 | N/A |
| 0434 | CRMS | 29.320 | −90.733 | N/A |
| 0464 | CRMS | 29.518 | −91.387 | N/A |
| 0479 | CRMS | 29.524 | −91.449 | N/A |
| 2785 | CRMS | 29.503 | −91.040 | N/A |
| 4455 | CRMS | 29.259 | −90.943 | N/A |
| 4782 | CRMS | 29.665 | −91.442 | N/A |
| 6038 | CRMS | 29.605 | −91.353 | N/A |
| 6304 | CRMS | 29.420 | −91.279 | N/A |
| Date | In Situ Slope | AirSWOT Slope | AirSWOT | Slope Error |
|---|---|---|---|---|
| (cm/km) | (cm/km) | (cm/km) | (Percent) | |
| 8 May | −4.02 | −4.06 | −0.0414 | −1.03 |
| 9 May | −3.75 | −3.47 | 0.287 | 7.65 |
| 11 May | −4.50 | −4.33 | 0.170 | 3.77 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Denbina, M.; Simard, M.; Rodriguez, E.; Wu, X.; Chen, A.; Pavelsky, T. Mapping Water Surface Elevation and Slope in the Mississippi River Delta Using the AirSWOT Ka-Band Interferometric Synthetic Aperture Radar. Remote Sens. 2019, 11, 2739. https://doi.org/10.3390/rs11232739
Denbina M, Simard M, Rodriguez E, Wu X, Chen A, Pavelsky T. Mapping Water Surface Elevation and Slope in the Mississippi River Delta Using the AirSWOT Ka-Band Interferometric Synthetic Aperture Radar. Remote Sensing. 2019; 11(23):2739. https://doi.org/10.3390/rs11232739
Chicago/Turabian StyleDenbina, Michael, Marc Simard, Ernesto Rodriguez, Xiaoqing Wu, Albert Chen, and Tamlin Pavelsky. 2019. "Mapping Water Surface Elevation and Slope in the Mississippi River Delta Using the AirSWOT Ka-Band Interferometric Synthetic Aperture Radar" Remote Sensing 11, no. 23: 2739. https://doi.org/10.3390/rs11232739