Author Contributions
Conceptualization, S.P., X.Z., M.R. and B.S; formal analysis, S.P.; investigation, S.P., X.Z., A.G.Z., M.R. and B.S.; methodology, S.P.; software, S.P. and A.G.Z.; supervision, X.Z., M.R. and B.S.; validation, S.P. and A.G.Z.; writing—original draft, S.P.; writing—review & editing, X.Z., A.G.Z., M.R. and B.S. All authors have read and agreed to the published version of the manuscript.
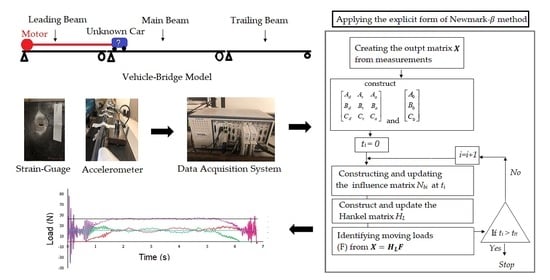
Figure 1.
Vehicle-bridge interaction system.
Figure 1.
Vehicle-bridge interaction system.
Figure 2.
An element under moving load.
Figure 2.
An element under moving load.
Figure 3.
Calculating the vehicle/bridge responses and the true moving loads by the explicit form of Newmark-β method.
Figure 3.
Calculating the vehicle/bridge responses and the true moving loads by the explicit form of Newmark-β method.
Figure 4.
Moving load identification by the explicit form of Newmark-β method.
Figure 4.
Moving load identification by the explicit form of Newmark-β method.
Figure 6.
Identified loads at road roughness level C at a of speed 10 m/s and with 2% noise: (a) rear axle load identification, (b) front axle load identification.
Figure 6.
Identified loads at road roughness level C at a of speed 10 m/s and with 2% noise: (a) rear axle load identification, (b) front axle load identification.
Figure 7.
Three-span bridge model.
Figure 7.
Three-span bridge model.
Figure 8.
Effect of noise on load identification at road roughness level A and speed of 40 m/s: (a) rear axle load identification, (b) front axle load identification.
Figure 8.
Effect of noise on load identification at road roughness level A and speed of 40 m/s: (a) rear axle load identification, (b) front axle load identification.
Figure 9.
Identified loads at road roughness level B, speed 15 m/s and 0% noise: (a) rear axle load identification, (b) front axle load identification.
Figure 9.
Identified loads at road roughness level B, speed 15 m/s and 0% noise: (a) rear axle load identification, (b) front axle load identification.
Figure 10.
Identified loads at road roughness level B, speed 15 m/s and 2% noise: (a) rear axle load identification, (b) front axle load identification.
Figure 10.
Identified loads at road roughness level B, speed 15 m/s and 2% noise: (a) rear axle load identification, (b) front axle load identification.
Figure 11.
Experimental set-up of the vehicle-bridge system.
Figure 11.
Experimental set-up of the vehicle-bridge system.
Figure 12.
(a) Details at the left-hand support of the main beam, (b) the two-axle model vehicle.
Figure 12.
(a) Details at the left-hand support of the main beam, (b) the two-axle model vehicle.
Figure 13.
(a) Data acquisition system, (b) strain gauge and (c) accelerometer.
Figure 13.
(a) Data acquisition system, (b) strain gauge and (c) accelerometer.
Figure 14.
Impact hammer.
Figure 14.
Impact hammer.
Figure 15.
Hammer impact force.
Figure 15.
Hammer impact force.
Figure 16.
Acceleration response at location 3L/16.
Figure 16.
Acceleration response at location 3L/16.
Figure 17.
FFT of acceleration responses at locations L/2 and 3L/16.
Figure 17.
FFT of acceleration responses at locations L/2 and 3L/16.
Figure 18.
The effect of on the error of the reconstructed strain.
Figure 18.
The effect of on the error of the reconstructed strain.
Figure 19.
Measured and reconstructed strain at mid-span.
Figure 19.
Measured and reconstructed strain at mid-span.
Figure 20.
Comparison of the effects of a small Nf and the optimized value on the identified axle loads. (a) Identified front axle load, (b) identified rear axle load.
Figure 20.
Comparison of the effects of a small Nf and the optimized value on the identified axle loads. (a) Identified front axle load, (b) identified rear axle load.
Figure 21.
Identified front, rear, and resultant load in comparison with the static axle load and static weight of the car (sensor placement #2).
Figure 21.
Identified front, rear, and resultant load in comparison with the static axle load and static weight of the car (sensor placement #2).
Figure 22.
The effect of sampling frequency on the identified loads at speed 0.47 m/s. (a) front axle load, (b) rear axle load, (c) resultant axle load.
Figure 22.
The effect of sampling frequency on the identified loads at speed 0.47 m/s. (a) front axle load, (b) rear axle load, (c) resultant axle load.
Figure 23.
Identified front, rear, and resultant load in comparison with the static axle load and static weight of the vehicle (speed: 0.75 m/s).
Figure 23.
Identified front, rear, and resultant load in comparison with the static axle load and static weight of the vehicle (speed: 0.75 m/s).
Figure 5.
Identified loads at road roughness level A with speed 15 m/s using sensor placement S7. (a) Rear axle load identification, (b) Front axle load identification.
Figure 5.
Identified loads at road roughness level A with speed 15 m/s using sensor placement S7. (a) Rear axle load identification, (b) Front axle load identification.
Table 1.
Vehicle parameters.
Table 1.
Vehicle parameters.
| mv = 17735 kg | mt1 = 1500 kg | Mt2 = 1000 kg |
| Iv = 1.47E5 Nm2 | Ks1 = 2.47E6 N/m | Ks2 = 4.23E6 N/m |
| a1 = 0.519 m | Kt1 = 1.75E6 N/m | Kt2 = 3.5E6 N/m |
| a2 = 0.481 m | Cs1 = 3E4 N/m/s | Cs2 = 4E4 N/m/s |
| S = 4.27 m | Ct1 = 3.9E3 N/m/s | Ct2 = 4.3E3 N/m/s |
Table 2.
Bridge parameters.
Table 2.
Bridge parameters.
| L = 30 m | EI = 2.5 × 1010 Nm2 | ρA = 5 × 103 kg/m | Damping ratio for all modes = 0.02 |
Table 3.
Sensor Placement.
Table 3.
Sensor Placement.
| Sensor Case | Sensor No. | Sensor Location |
|---|
| S3 | 3 | 1/3L, 2/3L,4/5L |
| S4 | 4 | 1/8L, 1/4L, 1/2L, 3/4L |
| S5 | 5 | 1/8L, 1/4L, 1/2L, 3/4L, 7/8L |
| S6 | 6 | 1/8L, 1/4L, 1/2L, 5/8L, 3/4L, 7/8L |
| S7 | 7 | 1/8L, 1/4L, 3/8L, 1/2L, 5/8L, 3/4L, 7/8L |
Table 5.
The relative error (%) of moving load identification from sensor placement S7.
Table 5.
The relative error (%) of moving load identification from sensor placement S7.
| Speed (m/s) | 10 | 20 | 30 | 40 |
|---|
| Road roughness | A | B | C | A | B | C | A | B | C | A | B | C |
| Front axle load | 1.1 | 9.5 | 12.2 | 2.2 | 8.1 | - | 1.8 | 8.5 | - | 1.2 | 8.9 | - |
| Rear axle load | 1.5 | 6.5 | 19.6 | 2.8 | 9.6 | - | 2.2 | 14.3 | - | 2.4 | 8.6 | - |
Table 6.
Percentage errors of the identified moving loads at different levels of speed and noise.
Table 6.
Percentage errors of the identified moving loads at different levels of speed and noise.
| Speed (m/s) | 15 | 20 | 30 | 40 |
|---|
| Measurement noise (%) | 0 | 2 | 5 | 0 | 2 | 5 | 0 | 2 | 5 | 0 | 2 | 5 |
| Front axle load | 0.01 | 3.2 | 3.4 | 0.01 | 2.8 | 4.8 | 0.01 | 2.6 | 3.1 | 0.02 | 2.9 | 3.6 |
| Rear axle load | 0.16 | 3.5 | 3.6 | 0.2 | 3.6 | 5.9 | 0.3 | 4.6 | 3.8 | 0.46 | 3.8 | 4.1 |
Table 7.
The relative error (%) of the identified forces at noise 0%.
Table 7.
The relative error (%) of the identified forces at noise 0%.
| Speed (m/s) | 15 | 20 | 30 | 40 |
|---|
| Road roughness | A | B | C | A | B | C | A | B | C | A | B | C | |
| Front axle load | 0.01 | 0.05 | 0.25 | 0.01 | 0.01 | - | 0.1 | 0.1 | - | 0.02 | - | - | |
| Rear axle load | 0.16 | 0.15 | 0.13 | 0.2 | 0.21 | - | 0.4 | 0.3 | - | 0.46 | - | - | |
Table 8.
The relative error (%) of the identified forces at 2% noise.
Table 8.
The relative error (%) of the identified forces at 2% noise.
| Speed (m/s) | 15 | 20 | 30 | 40 |
|---|
| Road roughness | A | B | C | A | B | C | A | B | C | A | B | C |
| Front axle load | 3.2 | 10.8 | 32.5 | 2.8 | 12.7 | - | 2.6 | 9.6 | - | 2.3 | - | - |
| Rear axle load | 3.5 | 11.8 | 29.2 | 3.6 | 18.0 | - | 4.6 | 12.4 | - | 3.4 | - | - |
Table 9.
Calculated and measured natural frequencies of the test beam (Hz).
Table 9.
Calculated and measured natural frequencies of the test beam (Hz).
| Modal Frequency | 1st | 2nd | 3rd |
|---|
| Measured | 6.27 | 27 | 61.17 |
| Calculated | 6.48 | 25.78 | 57.38 |
| Error | 3.34% | 4.52% | 6.19% |
Table 10.
Sensor arrangements.
Table 10.
Sensor arrangements.
| Case Number | Number of Sensors | Sensor Location |
|---|
| L/8 | L/4 | 3L/8 | L/2 | 5L/8 | 6L/8 | 7L/8 |
|---|
| #1 | 7 | * | * | * | * | * | * | * |
| #2 | 3 | | * | | * | | * | |
| #3 | 3 | * | | | * | | | * |
| #4 | 3 | | | * | * | * | | |
| #5 | 3 | * | | * | | * | | |
| #6 | 4 | * | * | * | * | | | |
| #7 | 4 | * | | * | * | | * | |
| #8 | 4 | * | * | | * | * | | |
| #9 | 4 | * | | * | | * | | * |
| #10 | 5 | * | * | | * | | * | * |
| #11 | 5 | * | | * | * | * | | * |
| #12 | 5 | | * | * | * | * | * | |
| #13 | 6 | * | * | * | | * | * | * |
| #14 | 1 | | | | * | | | |
| #15 | 2 | | | * | | * | | |
| #16 | 2 | | * | | | | * | |
| #17 | 2 | * | | | * | | | |
Table 11.
The percentage error for different sensor arrangements.
Table 11.
The percentage error for different sensor arrangements.
| Case Number | Number of Sensors | The Percentage Error (%) |
|---|
| Strain at Mid-Span | Average of Identified Front Axle Load | Average of Identified Rear Axle Load | Average of Resultant Identified Load |
|---|
| #1 | 7 | 1.75 | 0.09 | 0.25 | 0.08 |
| #2 | 3 | 2.97 | 1.03 | 2.46 | 0.72 |
| #3 | 3 | 4.79 | 2.33 | 3.53 | 2.93 |
| #4 | 3 | 4.06 | 1.66 | 0.35 | 0.66 |
| #5 | 3 | 2.55 | 3.77 | 3.87 | 0.05 |
| #6 | 4 | 4.96 | 4.10 | 3.8 | 0.51 |
| #7 | 4 | 2.00 | 4.15 | 4.38 | 0.12 |
| #8 | 4 | 3.76 | 0.03 | 1.02 | 0.49 |
| #9 | 4 | 2.31 | 0.51 | 2.56 | 1.03 |
| #10 | 5 | 2.51 | 0.53 | 1.16 | 0.32 |
| #11 | 5 | 1.86 | 0.28 | 2.12 | 0.92 |
| #12 | 5 | 1.99 | 0.32 | 1.55 | 0.61 |
| #13 | 6 | 1.80 | 0.36 | 0.66 | 0.15 |
| #14 | 1 | 10.78 | 0.31 | 0.65 | 0.48 |
| #15 | 2 | 5.28 | 1.70 | 0.04 | 0.87 |
| #16 | 2 | 11.02 | 1.74 | 0.18 | 0.96 |
| #17 | 2 | 9.07 | 8.82 | 11.87 | 1.52 |
Table 12.
The percentage error at different levels of sampling frequency at speed 0.47 m/s.
Table 12.
The percentage error at different levels of sampling frequency at speed 0.47 m/s.
| Sampling Frequency (Hz) | 100 | 200 | 300 | 600 |
| Reconstructed strain error (%) | 3.35 | 2.97 | 2.5 | 2.28 |
Table 13.
The percentage error at different levels of speed.
Table 13.
The percentage error at different levels of speed.
| Speed (m/s) | 0.47 | 0.75 | 0.97 |
| Reconstructed strain error (%) | 2.97 | 2.83 | 3.62 |
Table 4.
The relative error (%) of the identified forces for different sensor placements.
Table 4.
The relative error (%) of the identified forces for different sensor placements.
| Sensor Case | Noise Level (%) | Front Axle Load | Rear Axle Load |
|---|
| S3 | 0 | 0 | 0.25 |
| 2 | 2.68 | 2.8 |
| 5 | 4.19 | 3.71 |
| S4 | 0 | 0 | 0.23 |
| 2 | 2.3 | 2.73 |
| 5 | 3.11 | 3.18 |
| S5 | 0 | 0.22 | 2.9 |
| 2 | 3.03 | 4.12 |
| 5 | 3.2 | 4.03 |
| S6 | 0 | 0.31 | 2.42 |
| 2 | 2.78 | 2.92 |
| 5 | 2.6 | 3.29 |
| S7 | 0 | 0 | 0.24 |
| 2 | 2.15 | 2.01 |
| 5 | 3.3 | 3.85 |



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}