
Nearshore Ship Detection in PolSAR Images by Integrating Superpixel-Level GP-PNF and Refined Polarimetric Decomposition

 , ,
, ,
Abstract
:1. Introduction
2. Polarimetric Theory
2.1. Basic Polarimetric Matrix
2.2. Geometrical Perturbation-Polarimetric Notch Filter (GP-PNF)
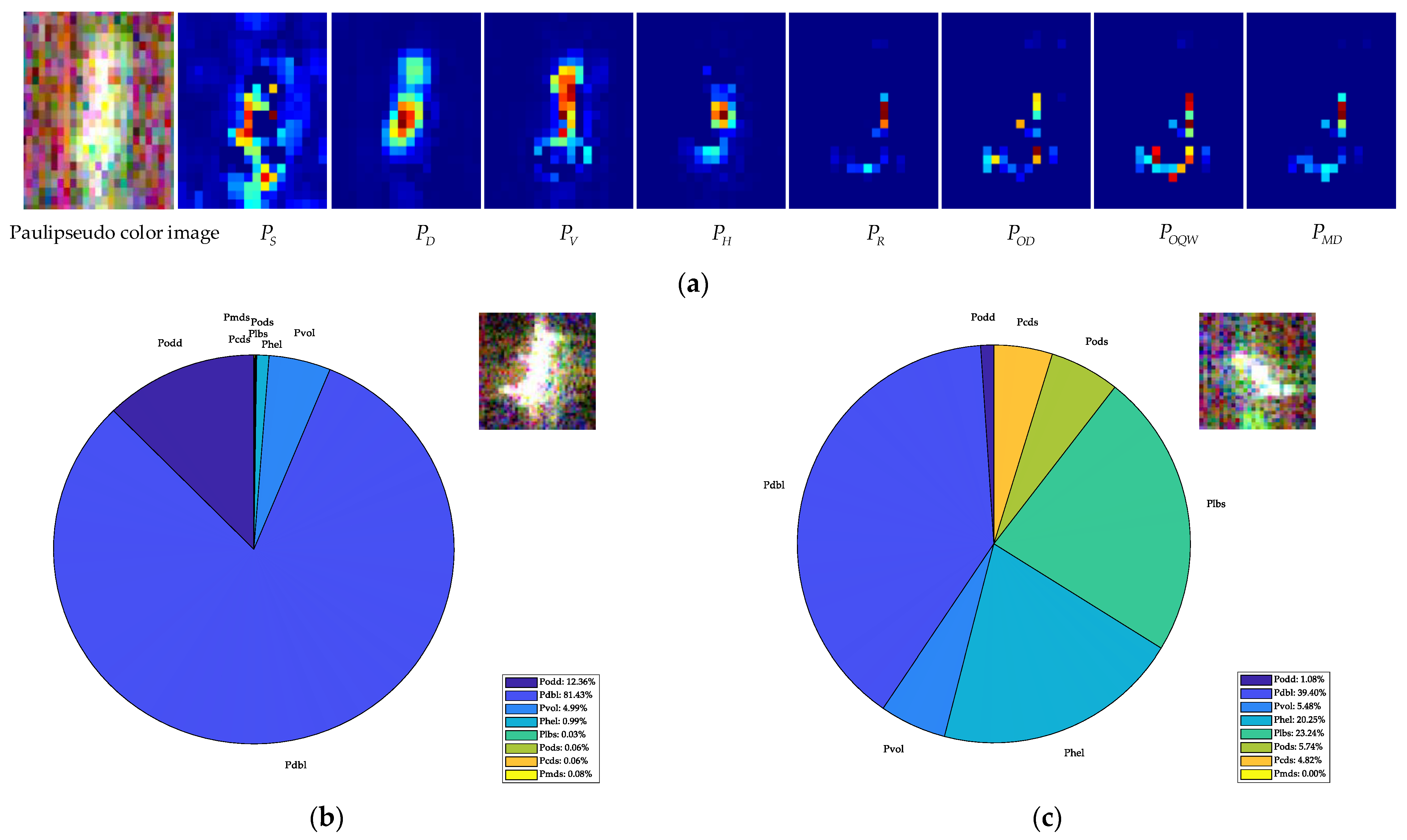
2.3. Refined Polarimetric Decomposition
3. Methods
3.1. Preprocessing
3.2. ECD-PNF Detector
3.2.1. Candidate Sea Clutter Superpixel Selection with AC Mechanism
3.2.2. Constructing Scattering Vectors Based on Refined Eight-Component Decomposition
3.2.3. Combining the Third Eigenvalue to Improve the Detector
4. Experimental Results
4.1. Data Description
4.2. Result Comparison
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tian, C.; Liu, D.; Xue, F.; Lv, Z.; Wu, X. Faster and Lighter: A Novel Ship Detector for SAR Images. IEEE Geosci. Remote Sens. Lett. 2024, 21, 1–5. [Google Scholar] [CrossRef]
- Li, H.; Cui, X.; Chen, S. PolSAR Ship Detection with Optimal Polarimetric Rotation Domain Features and SVM. Remote Sens. 2021, 13, 3932. [Google Scholar] [CrossRef]
- Cui, X.; Tao, C.; Su, Y.; Chen, S. PolSAR Ship Detection Based on Polarimetric Correlation Pattern. IEEE Geosci. Remote Sens. Lett. 2021, 18, 471–475. [Google Scholar] [CrossRef]
- Gu, M.; Wang, Y.; Liu, H.; Wang, P. PolSAR Ship Detection Based on a SIFT-like PolSAR Keypoint Detector. Remote Sens. 2022, 14, 2900. [Google Scholar] [CrossRef]
- Gao, G.; Bai, Q.; Zhang, C.; Zhang, L.; Yao, L. Dualistic Cascade Convolutional Neural Network Dedicated to Fully PolSAR Image Ship Detection. ISPRS J. Photogramm. Remote Sens. 2023, 202, 663–681. [Google Scholar] [CrossRef]
- Gao, G.; Shi, G. CFAR Ship Detection in Nonhomogeneous Sea Clutter Using Polarimetric SAR Data Based on the Notch Filter. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4811–4824. [Google Scholar] [CrossRef]
- Liu, T.; Zhang, J.; Gao, G.; Yang, J.; Marino, A. CFAR Ship Detection in Polarimetric Synthetic Aperture Radar Images Based on Whitening Filter. IEEE Trans. Geosci. Remote Sens. 2020, 58, 58–81. [Google Scholar] [CrossRef]
- Fan, W.; Zhou, F.; Tao, M.; Bai, X.; Shi, X.; Xu, H. An Automatic Ship Detection Method for PolSAR Data Based on K-Wishart Distribution. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2725–2737. [Google Scholar] [CrossRef]
- Liu, G.; Zhang, X.; Meng, J. A Small Ship Target Detection Method Based on Polarimetric SAR. Remote Sens. 2019, 11, 2938. [Google Scholar] [CrossRef]
- Chaney, R.; Bud, M.; Novak, L. On the Performance of Polarimetric Target Detection Algorithms. IEEE Aerosp. Electron. Syst. Mag. 1990, 5, 10–15. [Google Scholar] [CrossRef]
- Novak, L.; Burl, M.; Irving, W. Optimal Polarimetric Processing for Enhanced Target Detection. IEEE Trans. Aerosp. Electron. Syst. 1993, 29, 234–244. [Google Scholar] [CrossRef]
- Novak, L.; Burl, M. Optimal Speckle Reduction in Polarimetric SAR Imagery. IEEE Trans. Aerosp. Electron. Syst. 1990, 26, 293–305. [Google Scholar] [CrossRef]
- Pappas, O.; Achim, A.; Bull, D. Superpixel-Level CFAR Detectors for Ship Detection in SAR Imagery. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1397–1401. [Google Scholar] [CrossRef]
- Huang, X.; Huang, P.; Dong, L.; Song, H.; Yang, W. Saliency Detection Based on Distance Between Patches in Polarimetric SAR Images. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014. [Google Scholar]
- Liu, T.; Yang, Z.; Marino, A.; Gao, G.; Yang, J. PolSAR Ship Detection Based on Neighborhood Polarimetric Covariance Matrix. IEEE Trans. Geosci. Remote Sens. 2021, 59, 4874–4887. [Google Scholar] [CrossRef]
- Zhang, T.; Du, Y.; Yang, Z.; Quan, S.; Liu, T.; Xue, F.; Chen, Z.; Yang, J. PolSAR Ship Detection Using the Superpixel-Based Neighborhood Polarimetric Covariance Matrices. IEEE Geosci. Remote Sens. Lett. 2022, 19, 4015105. [Google Scholar] [CrossRef]
- Velotto, D.; Nunziata, F.; Migliaccio, M.; Lehner, S. Dual-Polarimetric TerraSAR-X SAR Data for Target at Sea Observation. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1114–1118. [Google Scholar] [CrossRef]
- Gao, S.; Liu, H. Polarimetric SAR Ship Detection Based on Scattering Characteristics. IEEE J. Miniaturization Air Space Syst. 2022, 3, 197–203. [Google Scholar] [CrossRef]
- Singh, G.; Malik, R.; Mohanty, S.; Rathore, V.; Yamada, K.; Umemura, M.; Yamaguchi, Y. Seven-Component Scattering Power Decomposition of POLSAR Coherency Matrix. IEEE Trans. Geosci. Remote Sens. 2019, 57, 8371–8382. [Google Scholar] [CrossRef]
- Chen, S.; Li, Y.; Wang, X.; Xiao, S.; Sato, M. Modeling and Interpretation of Scattering Mechanisms in Polarimetric Synthetic Aperture Radar: Advances and Perspectives. IEEE Signal Process. Mag. 2014, 31, 79–89. [Google Scholar] [CrossRef]
- Cameron, W.; Youssef, N.; Leung, L. Simulated Polarimetric Signatures of Primitive Geometrical Shapes. IEEE Trans. Geosci. Remote Sens. 1996, 34, 793–803. [Google Scholar] [CrossRef]
- Ringrose, R.; Harris, N. Ship Detection Using Polarimetric SAR Data. In SAR Workshop: CEOS Committee on Earth Observation Satellites; Ringrose, R., Harris, N., Eds.; European Space Agency: Paris, France, 2000; Volume 450, p. 687. [Google Scholar]
- Touzi, R.; Charbonneau, F.; Hawkins, R.; Murnaghan, k.; Kavoun, X. Ship-Sea Contrast Optimization When Using Polarimetric SARS. In Proceedings of the IEEE 2001 International Geoscience and Remote Sensing Symposium, Sydney, NSW, Australia, 9–13 July 2001; pp. 426–428. [Google Scholar]
- Cloude, S.; Pottier, E. A Review of Target Decomposition Theorems in Radar Polarimetry. IEEE Trans. Geosci. Remote Sens. 1996, 34, 498–518. [Google Scholar] [CrossRef]
- Guo, R.; Zhang, L.; Li, J.; Xing, M.; Zang, B.; Bao, Z. A Novel Strategy of Nonnegative-Matrix-Factorization-Based Polarimetric Ship Detection. IEEE Geosci. Remote Sens. Lett. 2011, 8, 1085–1089. [Google Scholar] [CrossRef]
- Freeman, A.; Durden, S. A Three-Component Scattering Model for Polarimetric SAR Data. IEEE Trans. Geosci. Remote Sens. 1998, 36, 963–973. [Google Scholar] [CrossRef]
- Yamaguchi, Y.; Moriyama, T.; Ishido, M.; Yamada, H. Four-Component Scattering Model for Polarimetric SAR Image Decomposition. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1699–1706. [Google Scholar] [CrossRef]
- Sugimoto, M.; Ouchi, K.; Nakamura, Y. On the Novel Use of Model-Based Decomposition in SAR Polarimetry for Target Detection on the Sea. Remote Sens. Lett. 2013, 4, 843–852. [Google Scholar] [CrossRef]
- Zhang, T.; Yang, Z.; Gan, H.; Xiang, D.; Zhu, S.; Yang, J. PolSAR Ship Detection Using the Joint Polarimetric Information. IEEE Trans. Geosci. Remote Sens. 2020, 58, 8225–8241. [Google Scholar] [CrossRef]
- Pan, X.; Wu, Z.; Yang, L.; Huang, Z. Ship Detection Method Based on Scattering Contribution for PolSAR Image. IEEE Geosci. Remote Sens. Lett. 2022, 19, 4503205. [Google Scholar] [CrossRef]
- Marino, A. A Notch Filter for Ship Detection with Polarimetric SAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1219–1232. [Google Scholar] [CrossRef]
- Marino, A.; Hajnsek, I. Statistical Tests for a Ship Detector Based on the Polarimetric Notch Filter. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4578–4595. [Google Scholar] [CrossRef]
- Zhang, T.; Marino, A.; Zhong, W.; Xiong, H. An Azimuth ambiguities removal method based on Polarimetric Notch Filter. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Fort Worth, TX, USA, 23–28 July 2017; pp. 2325–2328. [Google Scholar]
- Liu, W.; Chen, J.; Zhen, Y.; Zhao, Y. Polarimetric SAR Ship Detection Using Improved Notch Filter Based on Yamaguchi Decomposition. J. Geomat. Sci. Technol. 2017, 34, 44–48. [Google Scholar]
- Guo, Y.; Chen, S.; Zhan, R.; Wang, W.; Zhang, J. LMSD-YOLO: A Lightweight YOLO Algorithm for Multi-Scale SAR Ship Detection. Remote Sens. 2022, 14, 4801. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X.; Shi, J.; Wei, S.; Wang, J.; Li, J.; Su, H.; Zhou, Y. Balance Scene Learning Mechanism for Offshore and Inshore Ship Detection in SAR Images. IEEE Geosci. Remote Sens. Lett. 2022, 19, 4004905. [Google Scholar] [CrossRef]
- Wang, D.; Zhang, C.; Han, M. FIAD Net: A Fast SAR Ship Detection Network Based on Feature Integration Attention and Self-Supervised Learning. Int. J. Remote Sens. 2022, 43, 1485–1513. [Google Scholar] [CrossRef]
- Fan, W.; Zhou, F.; Bai, X.; Shi, X.; Hu, X. Ship Detection Using Deep Convolutional Neural Networks for PolSAR Images. Remote Sens. 2019, 11, 2862. [Google Scholar] [CrossRef]
- Bai, Q.; Gao, G.; Zhang, X.; Yao, L.; Zhang, C. LSDNet: Lightweight CNN Model Driven by PNF for PolSAR Image Ship Detection. IEEE J. Miniat. Air Space Syst. 2022, 3, 135–142. [Google Scholar] [CrossRef]
- Deng, J.; Wang, W.; Quan, S.; Zhan, R.; Zhang, J. Hierarchical Superpixel Segmentation for PolSAR Images Based on the Boruvka Algorithm. Remote Sens. 2022, 14, 4721. [Google Scholar] [CrossRef]
- Gao, G.; Liu, L.; Zhao, L.; Shi, G.; Kuang, G. An Adaptive and Fast CFAR Algorithm Based on Automatic Censoring for Target Detection in High-Resolution SAR Images. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1685–1697. [Google Scholar] [CrossRef]
- Greatbatch, I. Polarimetric Radar Imaging: From basics to applications. Int. J. Remote Sens. 2012, 33, 661–662. [Google Scholar] [CrossRef]
- Xiang, D.; Ban, Y.; Su, Y. Model-Based Decomposition with Cross Scattering for Polarimetric SAR Urban Areas. IEEE Geosci. Remote Sens. Lett. 2015, 12, 2496–2500. [Google Scholar] [CrossRef]
- Singh, G.; Yamaguchi, Y. Model-Based Six-Component Scattering Matrix Power Decomposition. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5687–5704. [Google Scholar] [CrossRef]
- Quan, S.; Qin, Y.; Xiang, D.; Wang, W.; Wang, X. Polarimetric Decomposition-Based Unified Manmade Target Scattering Characterization with Mathematical Programming Strategies. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5203718. [Google Scholar] [CrossRef]
- Xiang, D.; Ban, Y.; Wang, W.; Su, Y. Adaptive Superpixel Generation for Polarimetric SAR Images with Local Iterative Clustering and SIRV Model. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3115–3131. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Imaging Area | Acquisition Date | Size (Range × Azimuth) | Resolution (Range × Azimuth) | Ship Number |
|---|---|---|---|---|---|
| Radarsat-2 | Guangzhou | 31 May 2019 | 515 pixels × 379 pixels | 8 m × 8 m | 50 |
| GF-3 | Singapore | 27 May 2023 | 2002 pixels × 2842 pixels | 8 m × 8 m | 129 |
| GF-3 | Pearl River | 5 August 2017 | 1008 pixels × 924 pixels | 8 m × 8 m | 37 |
| Area | Method | TP | FN | FP | FoM | |
|---|---|---|---|---|---|---|
| Guangzhou | SCLC | 49 | 1 | 2 | 0.980 | 0.942 |
| GP-PNF | 50 | 0 | 12 | 1.000 | 0.806 | |
| YAMA-PNF | 50 | 0 | 3 | 0.980 | 0.943 | |
| ZT-PNF | 50 | 0 | 1 | 1.000 | 0.980 | |
| ECD-PNF | 50 | 0 | 1 | 1.000 | 0.980 | |
| Singapore | SCLC | 129 | 0 | 13 | 1.000 | 0.908 |
| GP-PNF | 129 | 0 | 13 | 1.000 | 0.908 | |
| YAMA-PNF | 129 | 0 | 2 | 1.000 | 0.985 | |
| ZT-PNF | 129 | 0 | 3 | 1.000 | 0.977 | |
| ECD-PNF | 129 | 0 | 0 | 1.000 | 1.000 | |
| Pearl River | SCLC | 36 | 1 | 3 | 0.973 | 0.900 |
| GP-PNF | 36 | 1 | 19 | 0.973 | 0.643 | |
| YAMA-PNF | 37 | 0 | 4 | 1.000 | 0.902 | |
| ZT-PNF | 37 | 0 | 1 | 1.000 | 0.974 | |
| ECD-PNF | 37 | 0 | 0 | 1.000 | 1.000 |
| Area | Method | |||
|---|---|---|---|---|
| GP-PNF | YAMA-PNF | ZT-PNF | ECD-PNF | |
| Guangzhou | 19.56 | 22.17 | 35.27 | 44.54 |
| Singapore | 36.97 | 47.27 | 50.67 | 66.86 |
| Pearl River | 33.33 | 42.87 | 50.98 | 60.39 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, S.; Wang, W.; Deng, J.; Quan, S.; Ruan, F.; Guo, P.; Fan, H. Nearshore Ship Detection in PolSAR Images by Integrating Superpixel-Level GP-PNF and Refined Polarimetric Decomposition. Remote Sens. 2024, 16, 1095. https://doi.org/10.3390/rs16061095
Wu S, Wang W, Deng J, Quan S, Ruan F, Guo P, Fan H. Nearshore Ship Detection in PolSAR Images by Integrating Superpixel-Level GP-PNF and Refined Polarimetric Decomposition. Remote Sensing. 2024; 16(6):1095. https://doi.org/10.3390/rs16061095
Chicago/Turabian StyleWu, Shujie, Wei Wang, Jie Deng, Sinong Quan, Feng Ruan, Pengcheng Guo, and Hongqi Fan. 2024. "Nearshore Ship Detection in PolSAR Images by Integrating Superpixel-Level GP-PNF and Refined Polarimetric Decomposition" Remote Sensing 16, no. 6: 1095. https://doi.org/10.3390/rs16061095