
Optimal Configuration of Omega-Kappa FF-SAR Processing for Specular and Non-Specular Targets in Altimetric Data: The Sentinel-6 Michael Freilich Study Case

 , , and
, , and
Abstract
:1. Introduction
- Percentage of Doppler bandwidth: S6-MF experiences aliasing in the along-track direction due to the wide antenna mainlobe relative to the pulse repetition frequency (PRF). Decisions regarding where to truncate have a substantial impact on the final resolution.
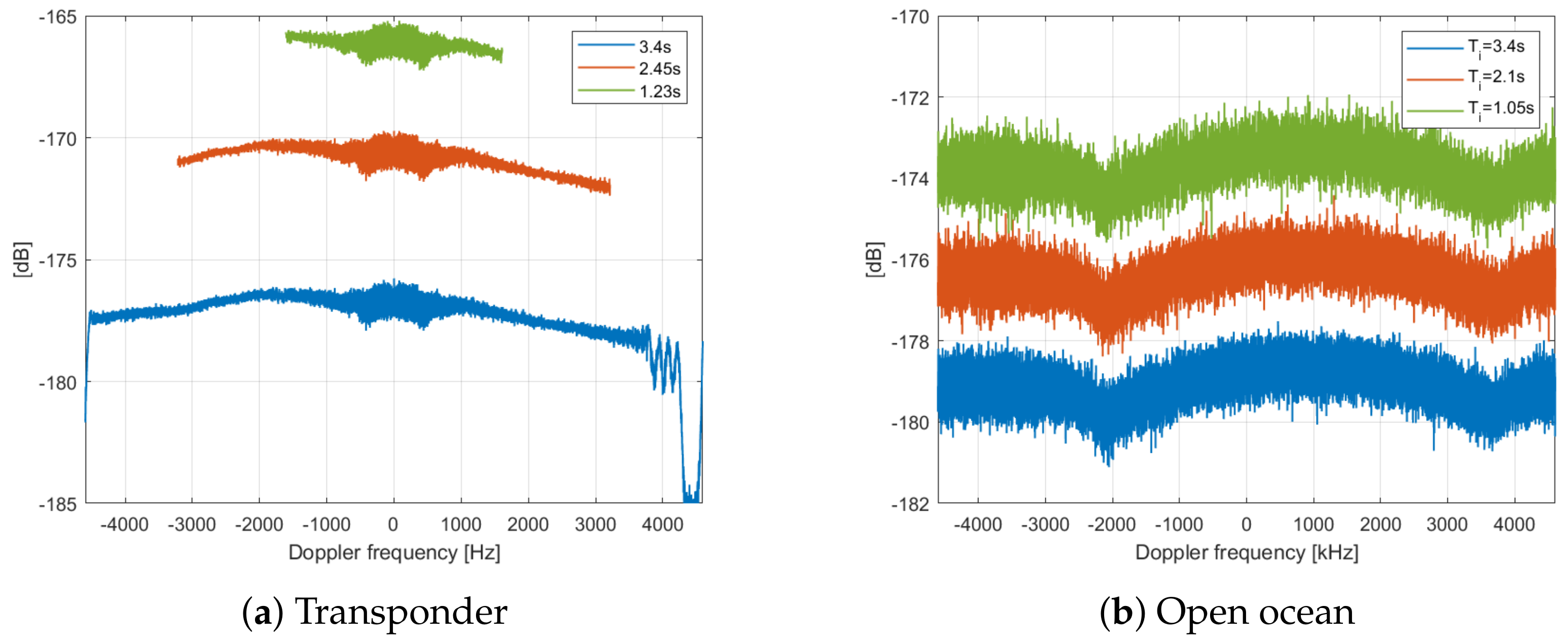
- Integration time: This parameter is closely linked to resolution and assumes critical importance, particularly for highly specular targets (i.e., low MSS), as discussed in detail below.
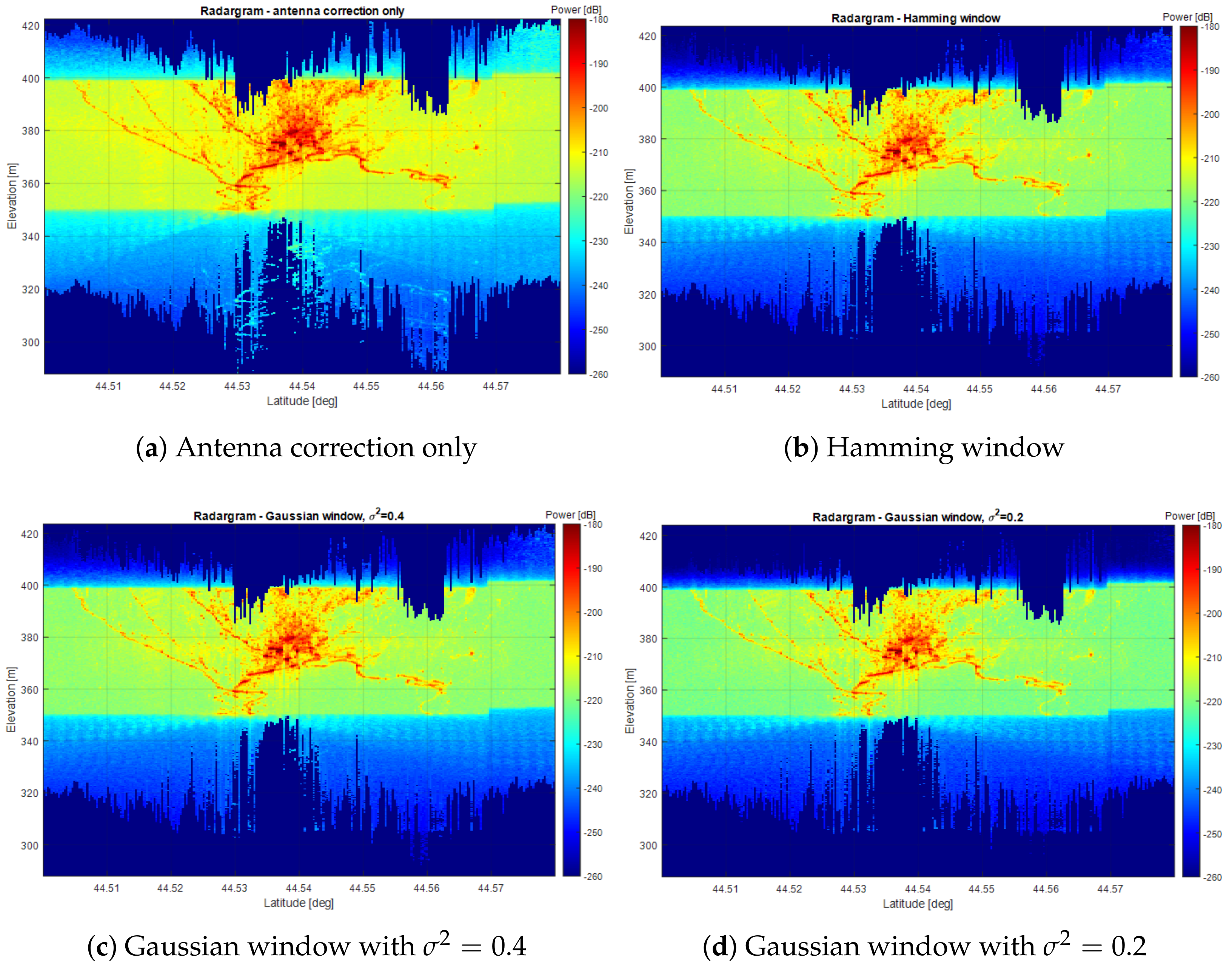
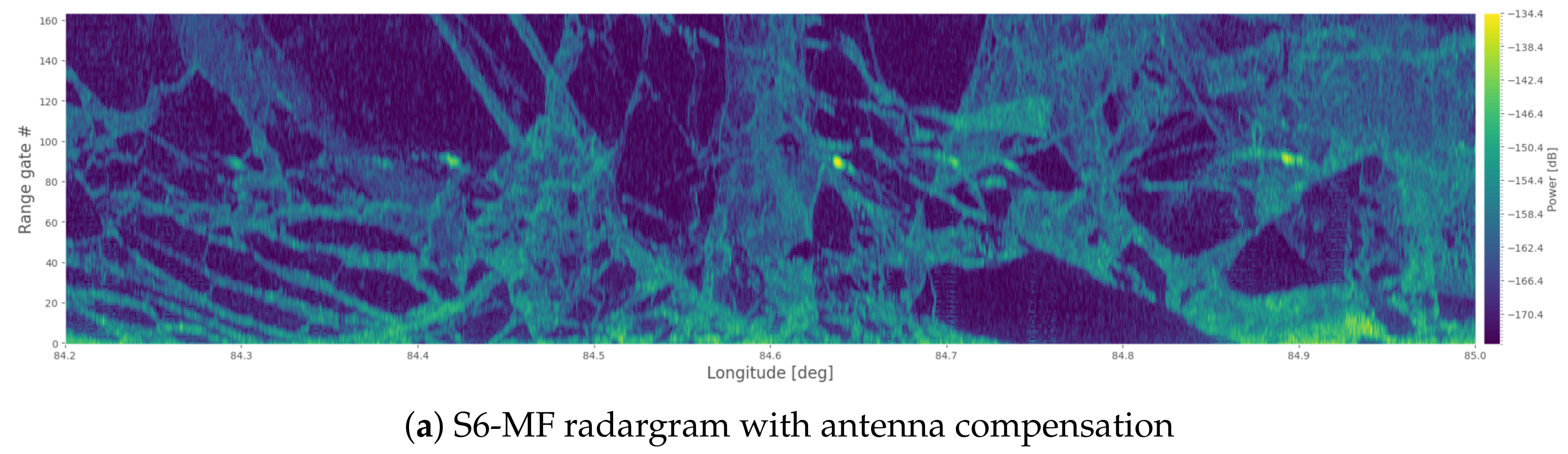
- Doppler windows: This aspect involves antenna compensation (whether to apply it or not) and the use of windowing techniques to reduce side lobes and replica amplitude levels. Balancing these factors is crucial for achieving a satisfactory final resolution and accurate geophysical parameter estimation.
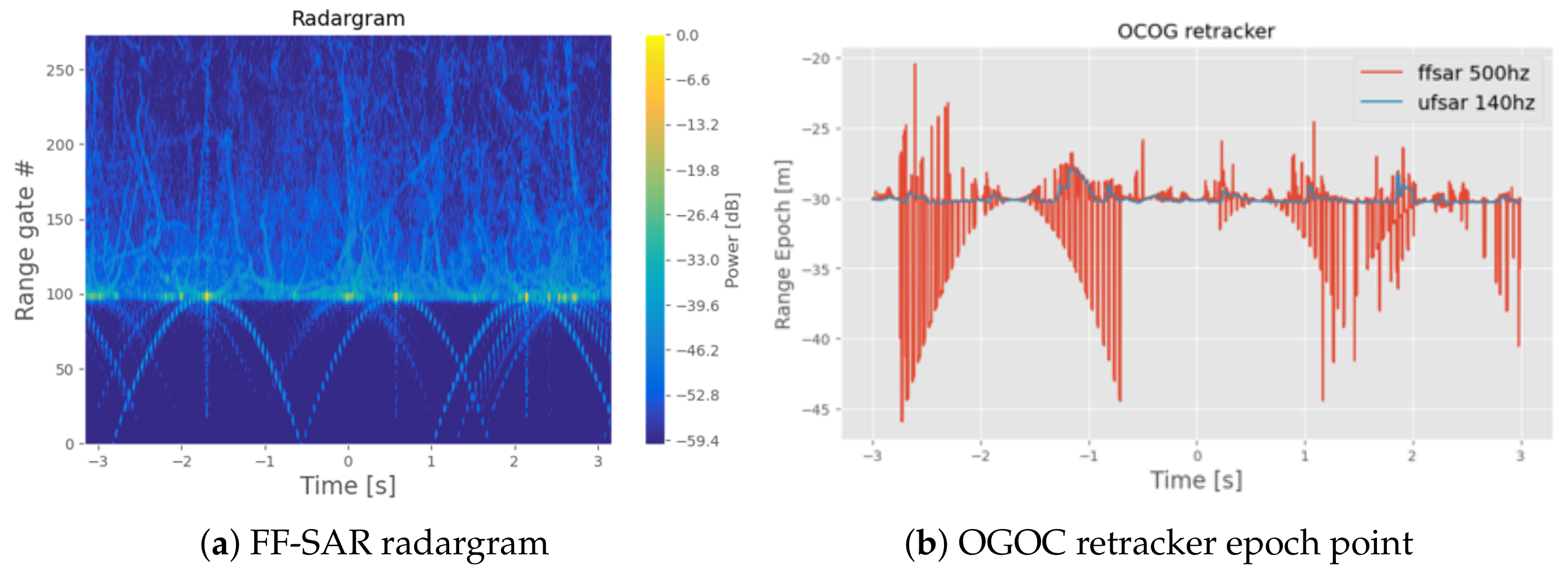
- Replica mitigation: While windowing helps reduce replica amplitudes, there are situations in which further mitigation is necessary without sacrificing too much signal, which could degrade resolution. This paper proposes a new, practical technique.
- Posting rate: The posting rate of multi-looked waveforms influences the signal-to-noise ratio and speckle noise. We propose a compromise aimed at achieving noise reduction while preserving high resolution.
2. Optimal Parameters Configuration
2.1. Percentage of Doppler Bandwidth
2.2. Integration Time
2.3. Doppler Windows
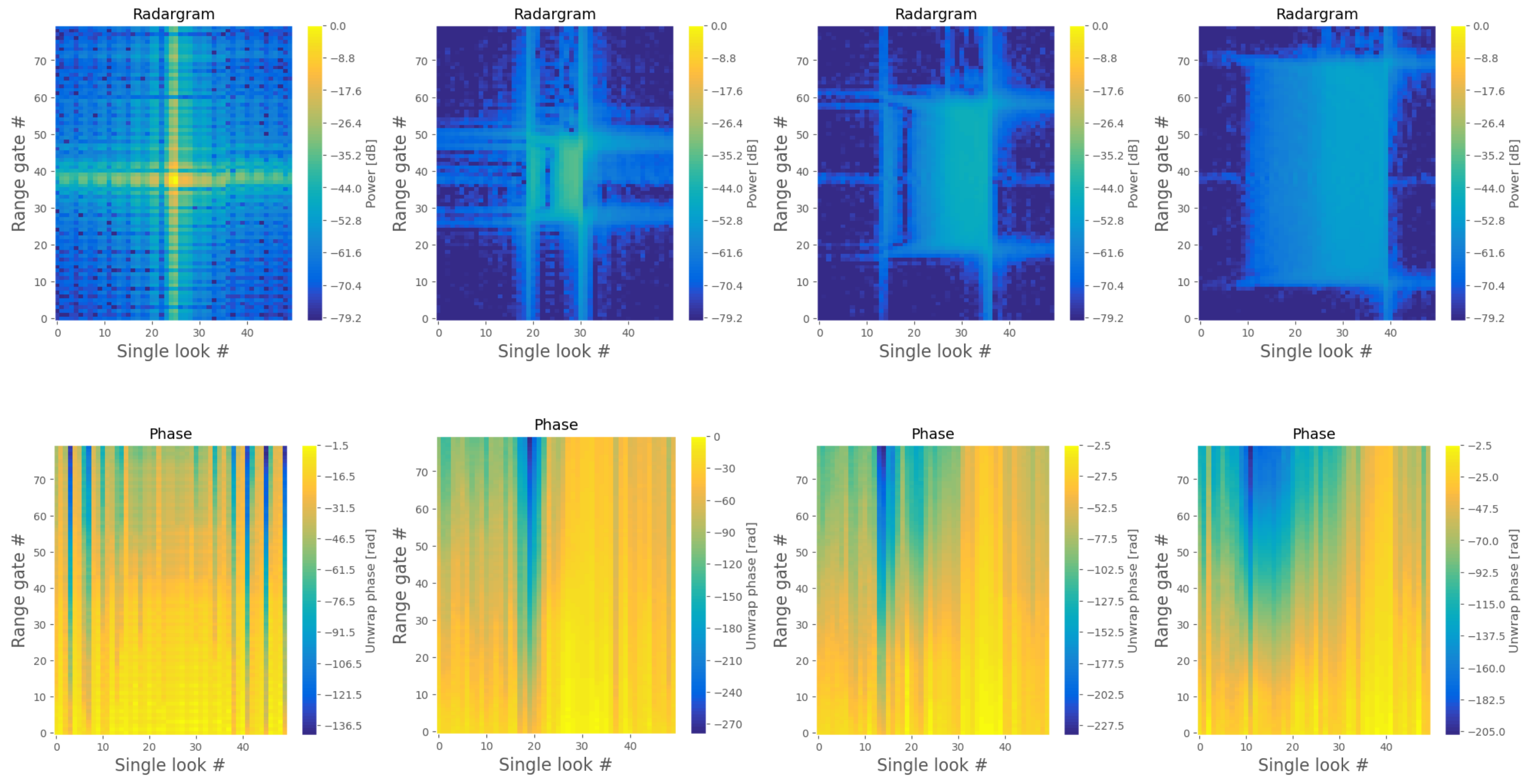
2.4. Replicas Mitigation
2.5. Multilooking
2.6. Final Recommendation
3. Validation Based on a Synergy with Sentinel-1 Imagery
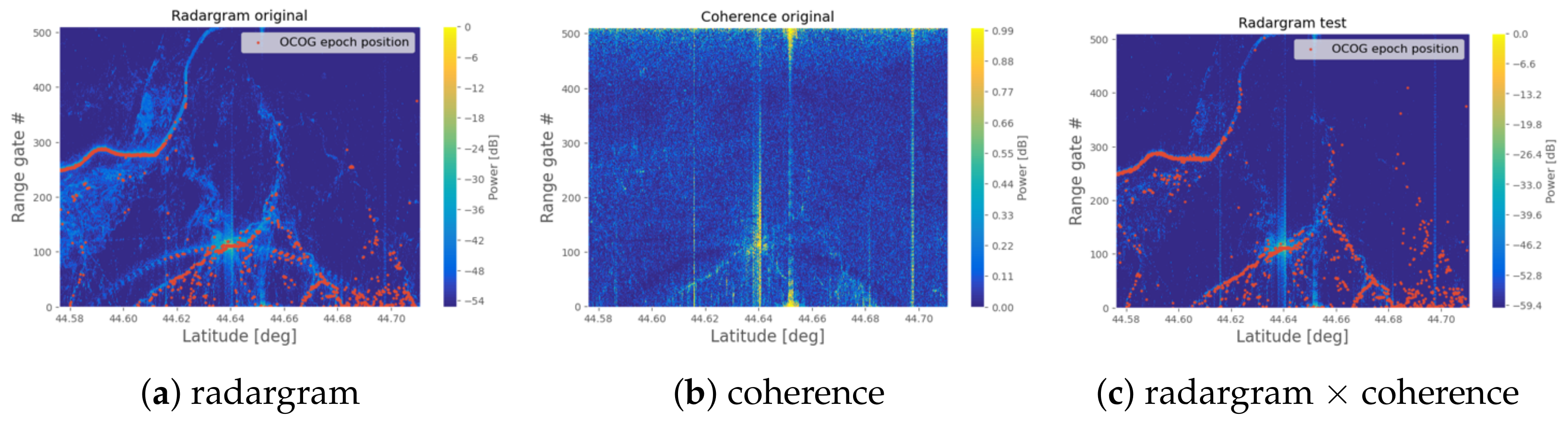
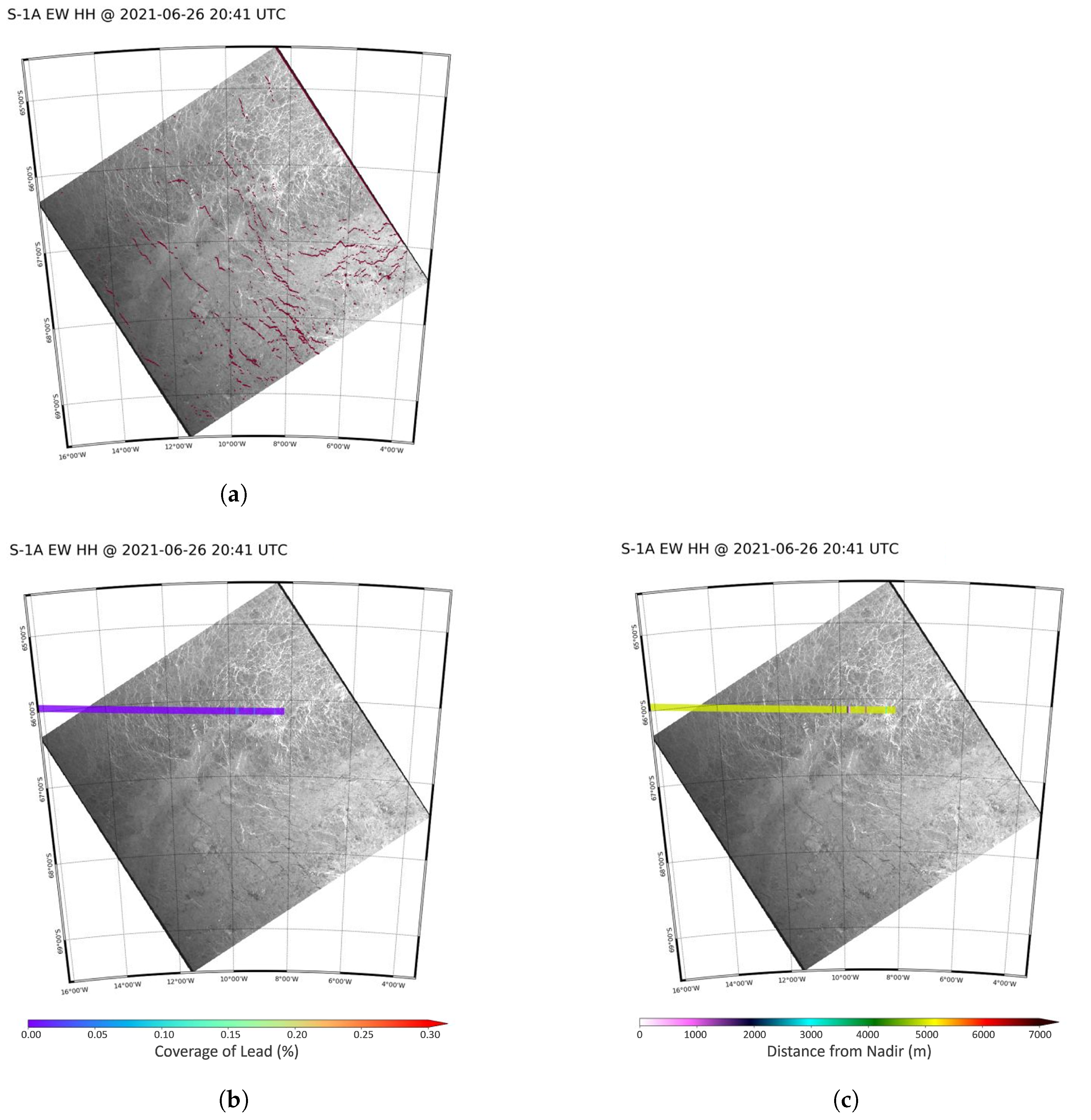
3.1. Sea-Ice Lead Detection
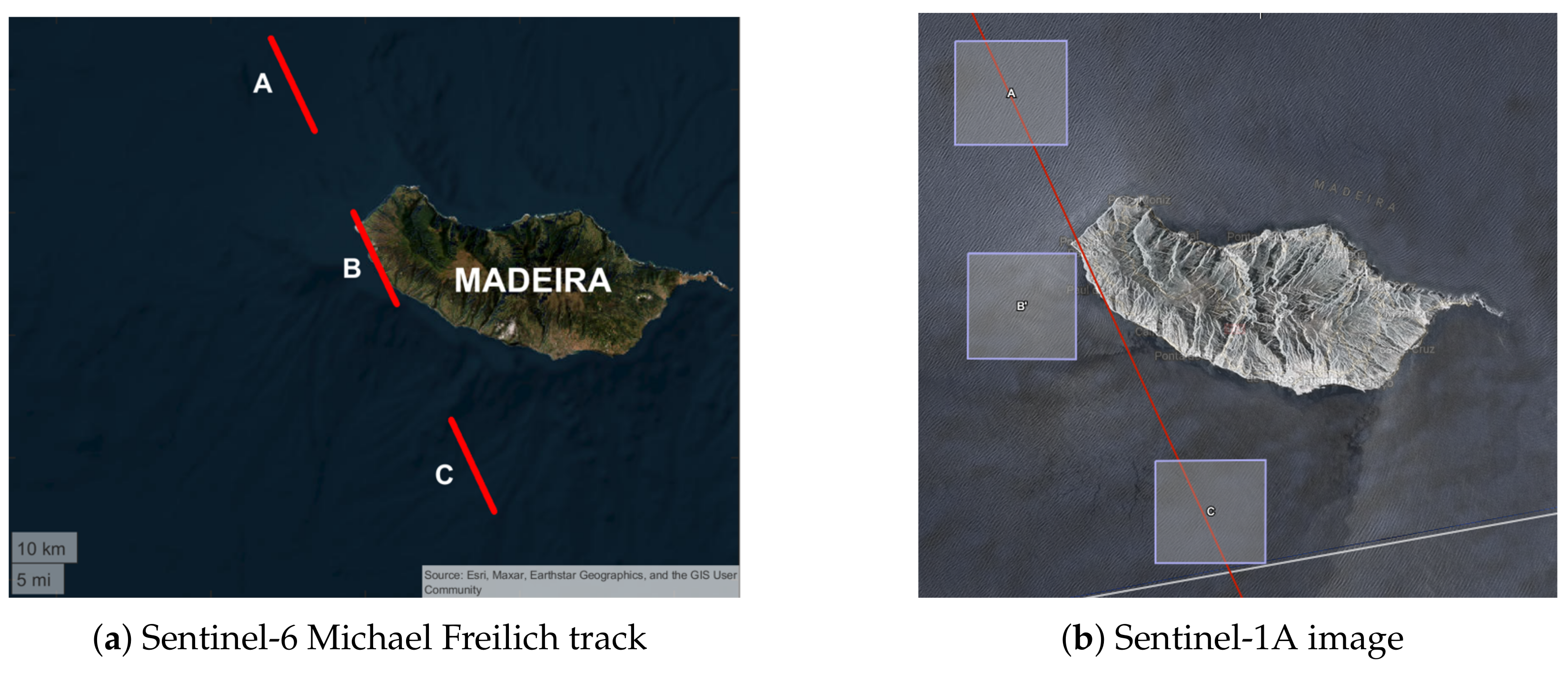
3.2. Sea-State Two-Dimensional Spectra
4. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Resolution with MSS
Appendix B. Replica Mis-Focalization
References
- Egido, A.; Smith, W.H.F. Fully Focused SAR Altimetry: Theory and Applications. IEEE Trans. Geosci. Remote Sens. 2017, 55, 392–406. [Google Scholar] [CrossRef]
- Amraoui, S.; Moreau, T.; Scagliola, M.; Guccione, P.; Alves, M.; Boy, F.; Maraldi, C.; Picot, N.; Donlon, C. Lead detection method from Sentinel-6 FF-SAR combined with imagery data, Living Planet Symposium (LPS). In Proceedings of the Meeting in Bonn, Bonn, Germany, 6–16 June 2022. [Google Scholar]
- Egido, A.; Buchhaupt, C.; Donghui, Y.; Smith, W.H.F.; Zhang, D.; Connor, L. A Novel Physical Retracker for Sea-Ice Freeboard Determination from High Resolution SAR Altimetry, Living Planet Symposium (LPS). In Proceedings of the Meeting in Bonn, Bonn, Germany, 6–16 June 2022. [Google Scholar]
- Gibert, F.; Gómez-Olivé, A.; McKeown, C.; Molina, R.; Garcia-Mondéjar, A. Water Elevation and Water Extent Measurements With Sentinel-6 Fully-Focussed SAR, Ocean Surface Topography Science Team (OSTST). In Proceedings of the Meeting in Venice, Venice, Italy, 27–28 October 2022. [Google Scholar]
- Schlembach, F.; Ehlers, F.; Kleinherenbrink, M.; Passaro, M.; Dettmering, D.; Seitz, F.; Slobbe, C. Benefits of fully focused SAR altimetry to coastal wave height estimates: A case study in the North Sea. Remote Sens. Environ. 2023, 289, 113517. [Google Scholar] [CrossRef]
- Altiparmaki, O.; Kleinherenbrink, M.; Naeije, M.; Slobbe, D.; Visser, P. SAR Altimetry Data as a New Source for Swell Monitoring. Geophys. Res. Lett. 2022, 49, e2021GL096224. [Google Scholar] [CrossRef]
- Buchhaupt, C.; Fenoglio, L.; Becker, M.; Kusche, J. Impact of vertical water particle motions on focused SAR altimetry. Adv. Space Res. 2021, 68, 853–874. [Google Scholar] [CrossRef]
- Guccione, P.; Scagliola, M.; Giudici, D. 2D Frequency Domain Fully Focused SAR Processing for High PRF Radar Altimeters. Remote Sens. 2018, 10, 1943. [Google Scholar] [CrossRef]
- Phalippou, L.; Caubet, E.; Thouvenot, E. A Ka-band altimeter for future altimetry missions. In Proceedings of the IEEE 1999 International Geoscience and Remote Sensing Symposium, Hamburg, Germany, 28 June–2 July 1999; IGARSS’99 (Cat. No.99CH36293). Volume 1, pp. 503–505. [Google Scholar] [CrossRef]
- Rostan, F.; Mallow, U. The CryoSat Earth Explorer Opportunity Mission-system calibration and mission performance. In Proceedings of the IGARSS 2001. Scanning the Present and Resolving the Future, Proceedings of the IEEE 2001 International Geoscience and Remote Sensing Symposium (Cat. No.01CH37217); Sydney, NSW, Australia, 9–13 July 2001, Volume 1, pp. 552–554. [CrossRef]
- Donlon, C.; Cullen, R.; Giulicchi, L.; Fornari, M.; Vuilleumier, P. Copernicus Sentinel-6 Michael Freilich Satellite Mission: Overview and Preliminary in Orbit Results. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 7732–7735. [Google Scholar] [CrossRef]
- Dinardo, S.; Fenoglio-Marc, L.; Becker, M.; Scharroo, R.; Fernandes, M.J.; Staneva, J.; Grayek, S.; Benveniste, J. A RIP-based SAR retracker and its application in North East Atlantic with Sentinel-3. Adv. Space Res. 2021, 68, 892–929. [Google Scholar] [CrossRef]
- Curlander, J.C.; McDonough, N.R. Synthetic Aperture Radar: Systems and Signal Processing; Wiley Series in Remote Sensing and Image Processing; Wiley: New York, NY, USA, 1992. [Google Scholar]
- Ray, C.; Martin-Puig, C.; Clarizia, M.; Ruffini, G.; Dinardo, S.; Gommenginger, C.; Benveniste, J. SAR Altimeter Backscattered Waveform Model. Geosci. Remote Sens. IEEE Trans. 2015, 53, 911–919. [Google Scholar] [CrossRef]
- Ehlers, F.; Schlembach, F.; Kleinherenbrink, M.; Slobbe, C. Validity assessment of SAMOSA retracking for fully-focused SAR altimeter waveforms. Adv. Space Res. 2023, 71, 1377–1396. [Google Scholar] [CrossRef]
- Mertikas, S.P.; Donlon, C.; Mavrocordatos, C.; Piretzidis, D.; Kokolakis, C.; Cullen, R.; Matsakis, D.; Borde, F.; Fornari, M.; Boy, F.; et al. Performance evaluation of the CDN1 altimetry Cal/Val transponder to internal and external constituents of uncertainty. Adv. Space Res. 2022, 70, 2458–2479. [Google Scholar] [CrossRef]
- Bertero, M.; Boccacci, P. Introduction to Inverse Problems in Imaging; CRC Press: Boca Raton, FL, USA, 2020. [Google Scholar] [CrossRef]
- Tourain, C.; Piras, F.; Ollivier, A.; Hauser, D.; Poisson, J.C.; Boy, F.; Thibaut, P.; Hermozo, L.; Tison, C. Benefits of the Adaptive Algorithm for Retracking Altimeter Nadir Echoes: Results From Simulations and CFOSAT/SWIM Observations. IEEE Trans. Geosci. Remote Sens. 2021, 59, 9927–9940. [Google Scholar] [CrossRef]
- Longépé, N.; Thibaut, P.; Vadaine, R.; Poisson, J.C.; Guillot, A.; Boy, F.; Picot, N.; Borde, F. Comparative Evaluation of Sea Ice Lead Detection Based on SAR Imagery and Altimeter Data. IEEE Trans. Geosci. Remote Sens. 2019, 57, 4050–4061. [Google Scholar] [CrossRef]
- Rieu, P.; Amraoui, S.; Restano, M. Standalone Multi-mission Altimetry Processor (SMAP), June 2021. Available online: https://github.com/cls-obsnadir-dev/SMAP-FFSAR (accessed on 15 February 2023).
- Meijering, E.; Jacob, M.; Sarria, J.C.; Steiner, P.; Hirling, H.; Unser, M. Design and validation of a tool for neurite tracing and analysis in fluorescence microscopy images. Cytom. Part A 2004, 58, 167–176. [Google Scholar] [CrossRef] [PubMed]
- Sato, Y.; Nakajima, S.; Shiraga, N.; Atsumi, H.; Yoshida, S.; Koller, T.; Gerig, G.; Kikinis, R. Three-dimensional multi-scale line filter for segmentation and visualization of curvilinear structures in medical images. Med Image Anal. 1998, 2, 143–168. [Google Scholar] [CrossRef] [PubMed]
- Amraoui, S.; Moreau, T.; Borde, F.; Boy, F. Replica removal of FFSAR data, OSTST. In Proceedings of the Meeting in Venice, Venice, Italy, 27–28 October 2022. [Google Scholar]
- Hernández, S.; Gibert, F.; Garcia-Mondéjar, A.; Roca, M. Leads Detection with Fully-Focused SAR in Antarctica, OSTST. In Proceedings of the Meeting in Venice, Venice, Italy, 27–28 October 2022. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | No-Antenna | Antenna Only | Hamming | Gaussian 0.4 | Gaussian 0.2 |
|---|---|---|---|---|---|
| Resolution [m] | 0.643 | 0.614 | 0.858 | 0.837 | 1.083 |
| PSLR [dB] | −15.42 | −14.11 | −32.69 | −35.26 | −41.70 |
| ISLR [dB] | −13.45 | −11.86 | −31.56 | −32.85 | −41.81 |
| Replica [dB] | −30.7 | −30.8 | −34.8 | −35.0 | −37.0 |
| Surface Type | % of DB | Int. Time | Ant. Comp. | Windo-Wing | Replica Mit. | Multi-Looking |
|---|---|---|---|---|---|---|
| Specular | 75% | 2.55 | yes | yes | yes | 300–500 Hz |
| Non-specular | 60% | 2.05 | yes | no | no | 150–200 Hz |
| Sensor | Area A | Area B | Area C |
|---|---|---|---|
| Sentinel-1A | Lp = 276 m | Lp = 243 m | Lp = 259 m |
| Tp = 13.3 s | Tp = 12.5 s | Tp = 12.9 s | |
| Dir = 119°/299° | Dir = 126°/306° | Dir = 128°/308° | |
| Sentinel-6 Michael Freilich | Lp = 271 m | Lp = 252 m | Lp = 261 m |
| Tp = 13.2 s | Tp = 12.7 s | Tp = 12.9 s | |
| Dir = 168°/348° | Dir = 137°/317° | Dir = 137°/317° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Amraoui, S.; Guccione, P.; Moreau, T.; Alves, M.; Altiparmaki, O.; Peureux, C.; Recchia, L.; Maraldi, C.; Boy, F.; Donlon, C. Optimal Configuration of Omega-Kappa FF-SAR Processing for Specular and Non-Specular Targets in Altimetric Data: The Sentinel-6 Michael Freilich Study Case. Remote Sens. 2024, 16, 1112. https://doi.org/10.3390/rs16061112
Amraoui S, Guccione P, Moreau T, Alves M, Altiparmaki O, Peureux C, Recchia L, Maraldi C, Boy F, Donlon C. Optimal Configuration of Omega-Kappa FF-SAR Processing for Specular and Non-Specular Targets in Altimetric Data: The Sentinel-6 Michael Freilich Study Case. Remote Sensing. 2024; 16(6):1112. https://doi.org/10.3390/rs16061112
Chicago/Turabian StyleAmraoui, Samira, Pietro Guccione, Thomas Moreau, Marta Alves, Ourania Altiparmaki, Charles Peureux, Lisa Recchia, Claire Maraldi, François Boy, and Craig Donlon. 2024. "Optimal Configuration of Omega-Kappa FF-SAR Processing for Specular and Non-Specular Targets in Altimetric Data: The Sentinel-6 Michael Freilich Study Case" Remote Sensing 16, no. 6: 1112. https://doi.org/10.3390/rs16061112