Integrating Quickbird Multi-Spectral Satellite and Field Data: Mapping Bathymetry, Seagrass Cover, Seagrass Species and Change in Moreton Bay, Australia in 2004 and 2007




Abstract
:
1. Introduction
2. Methods
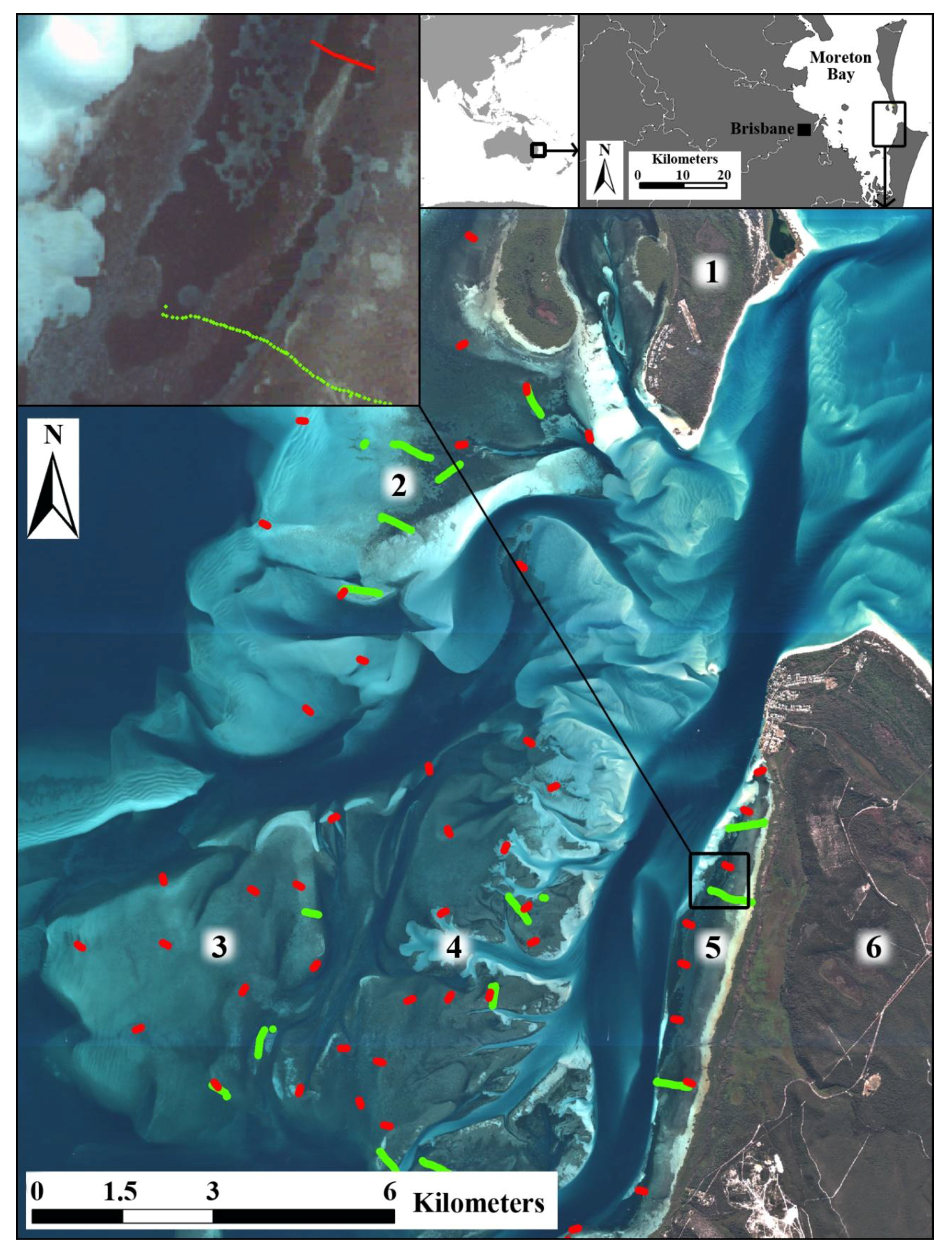
2.1. Study Site
2.2. Image Data Acquisition


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quickbird-2 | 2004 | 2007 |
|---|---|---|
| Date Acquired | 17 September 2004 | 4 July 2007 |
| Time Acquired | 0950 local | 1012 local |
| Source | Digital Globe | Digital Globe |
| Tidal Stage-adjusted for Amity Point | Approximately 1.7 m at 0950 High tide: 1.73 m at 1016 local | Approximately 1.1 m at 1015 Low tide: 0.36 m at 0516 High tide: 1.42 m at 1112 |
| Pixel Size | 2.4 m (multispectral) | 2.4 m (multispectral); 0.64 m (pan-sharpened) |
| Band Ranges | Blue: 0.45–0.52 µm Green: 0.52–0.60 µm Red: 0.63–0.69 µm NIR: 0.76–0.90 µm | Blue: 0.45–0.52 µm Green: 0.52–0.60 µm Red: 0.63–0.69 µm NIR: 0.76–0.90 µm |
2.3. Bathymetry and Seagrass Data Acquisition and Analysis
2.4. Image Georeferencing
2.5. Image Masking
2.6. Bathymetry Mapping
2.6.1. Linear (Lyzenga) Algorithm
2.6.2. Ratio Algorithm
2.6.3. Accuracy Assessment
2.7. Seagrass Mapping
2.7.1. Cover Mapping Using Seagrass Percentage Cover Field Data
2.7.2. Seagrass Cover Change Detection
2.7.3. Species Mapping Using Species Composition Field Data
2.7.4. Accuracy Assessment
3. Results and Discussion
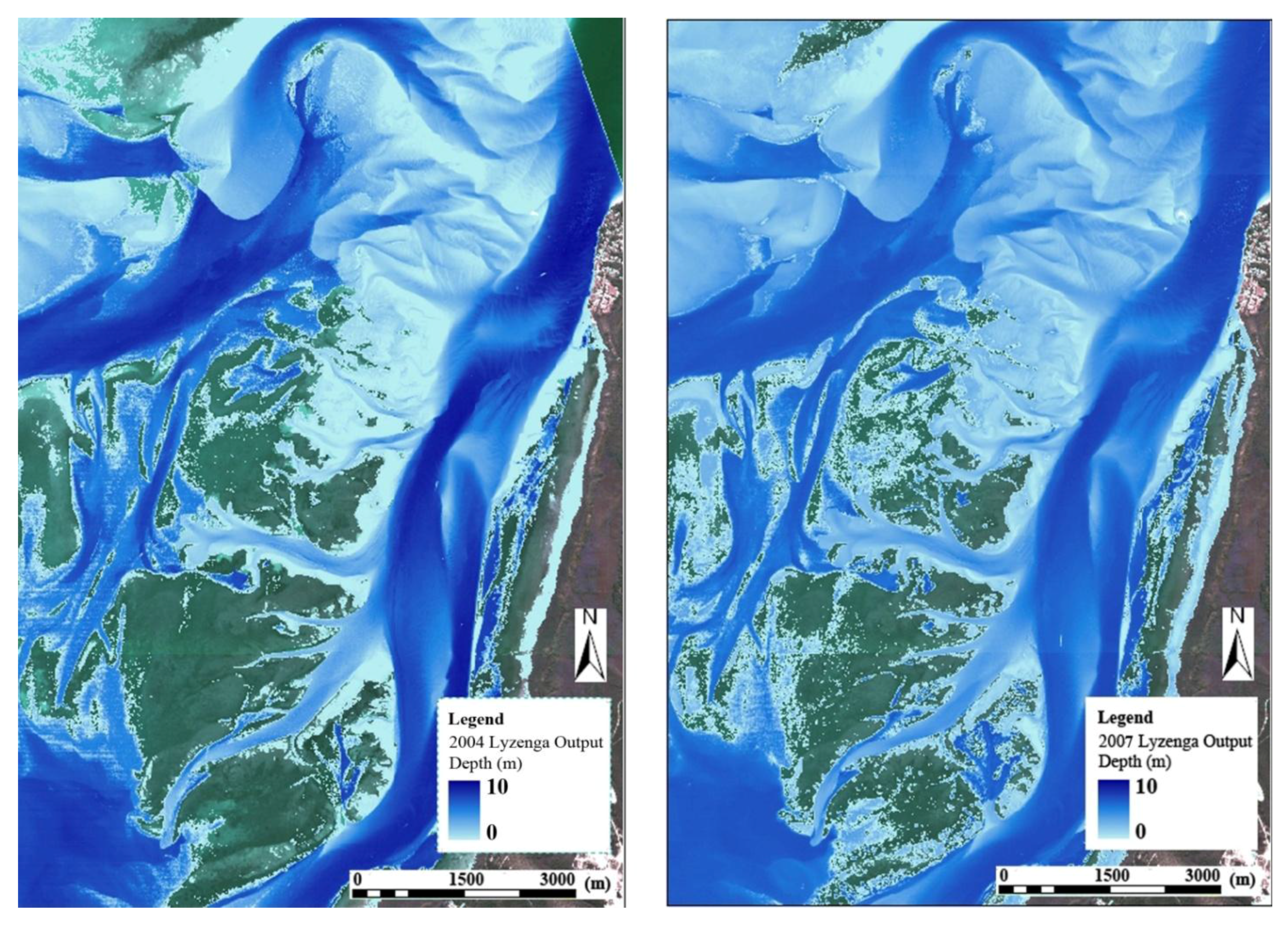
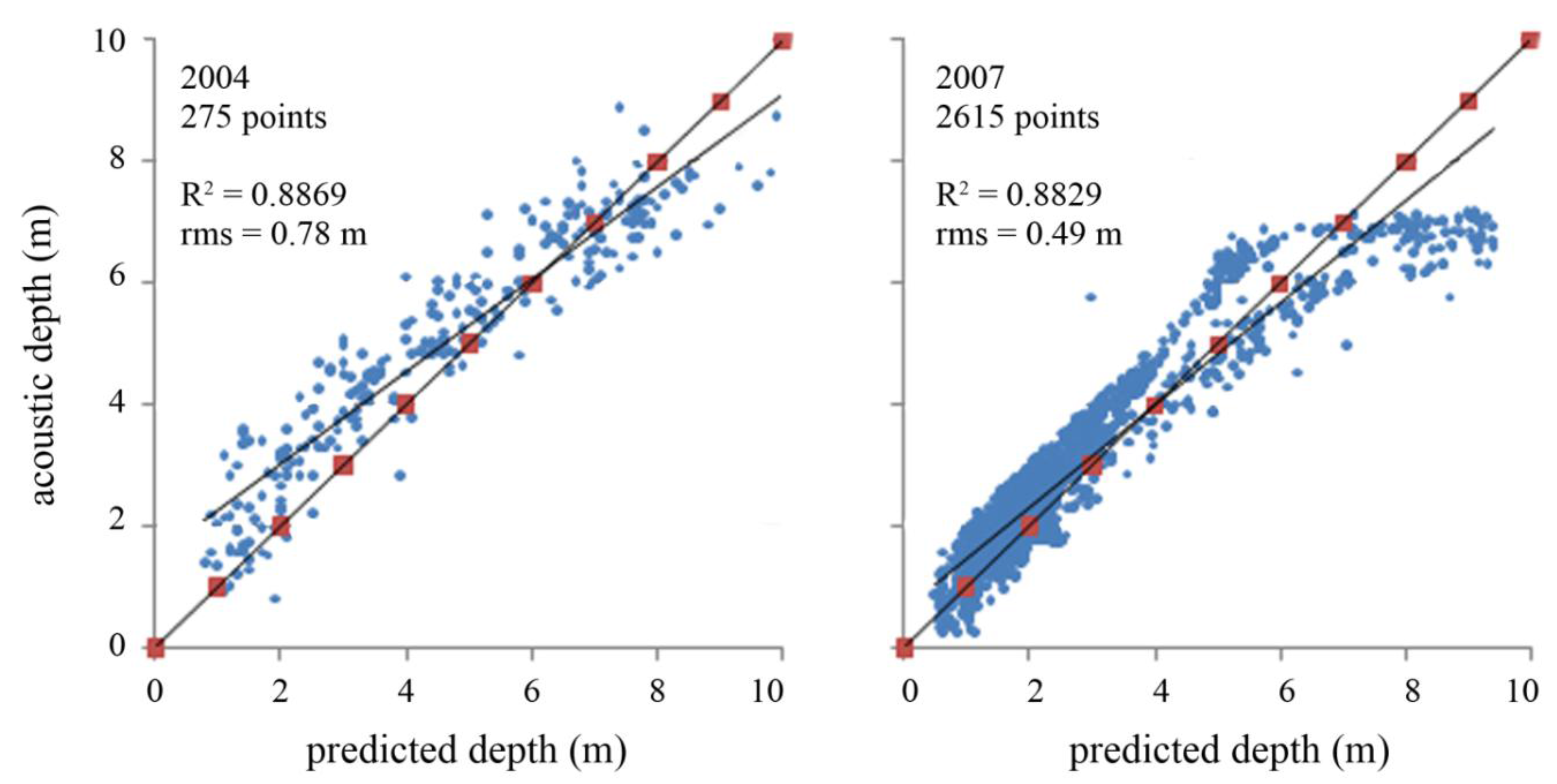
3.1. Bathymetry Mapping
3.1.1. Linear (Lyzenga) Algorithm


3.1.2. Ratio Algorithm
3.2. Seagrass Mapping
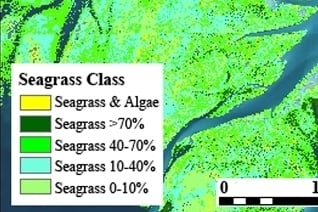
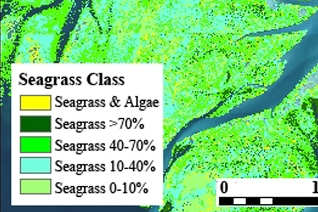
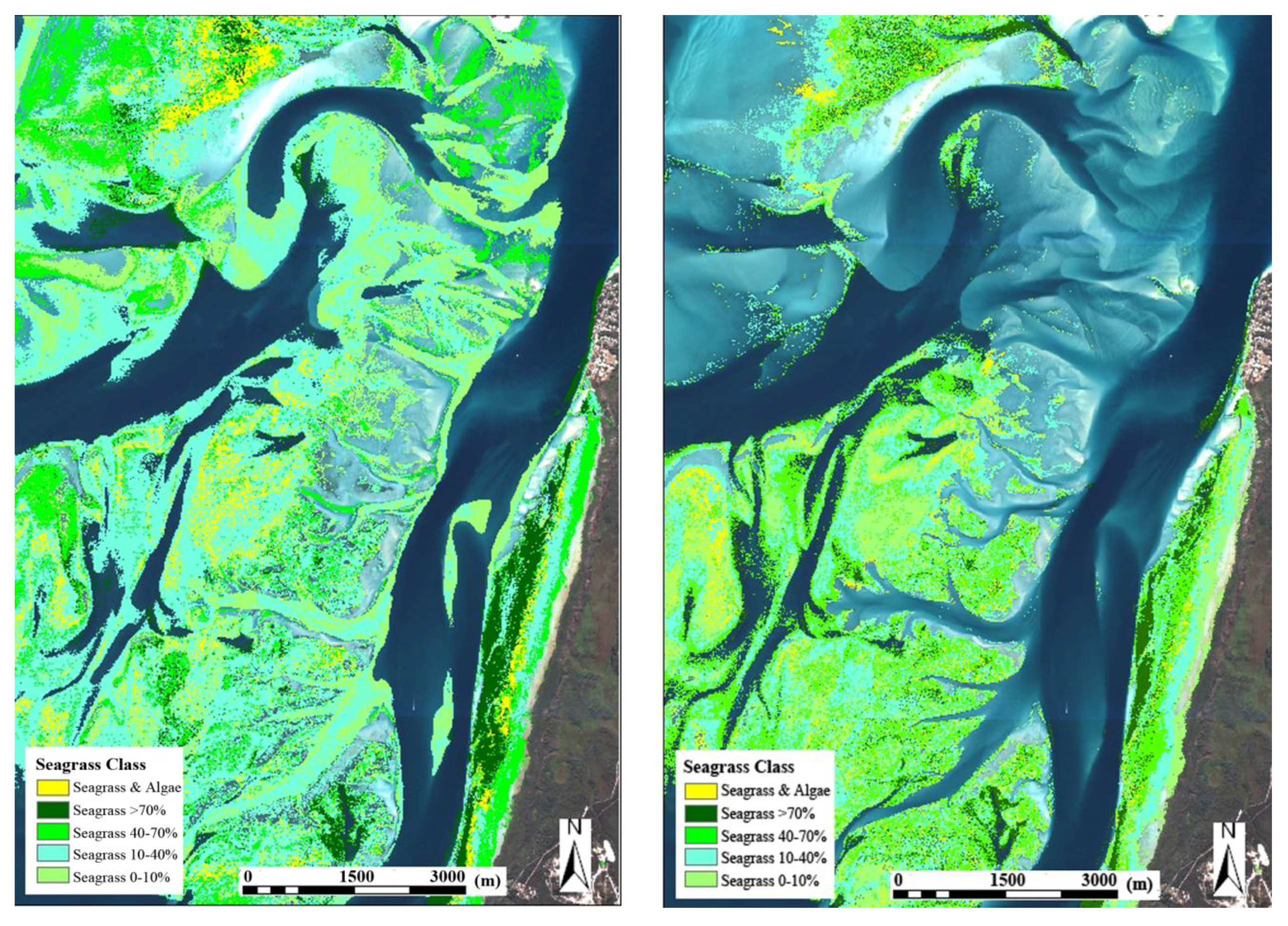
3.2.1. Seagrass Cover Maps

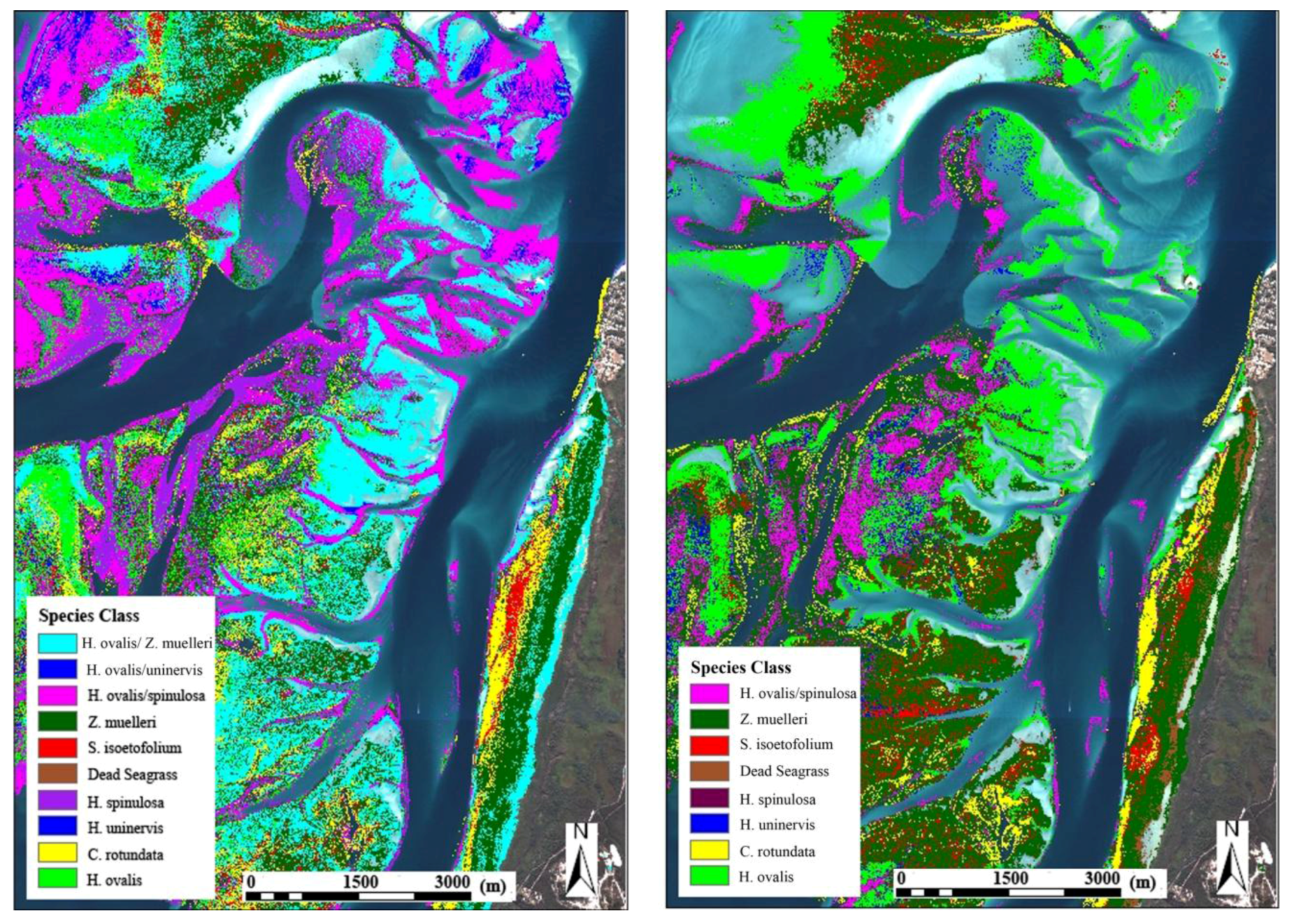
3.2.2. Seagrass Species Maps

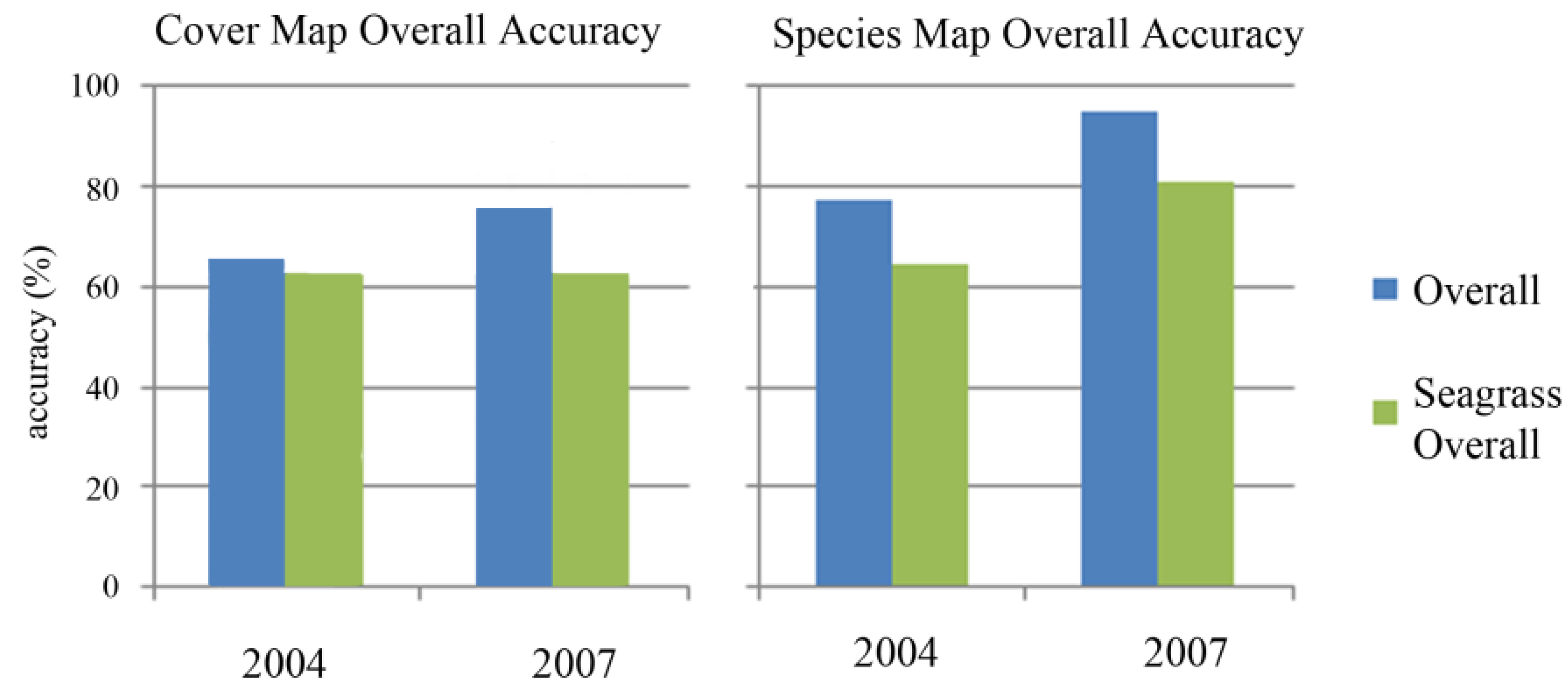
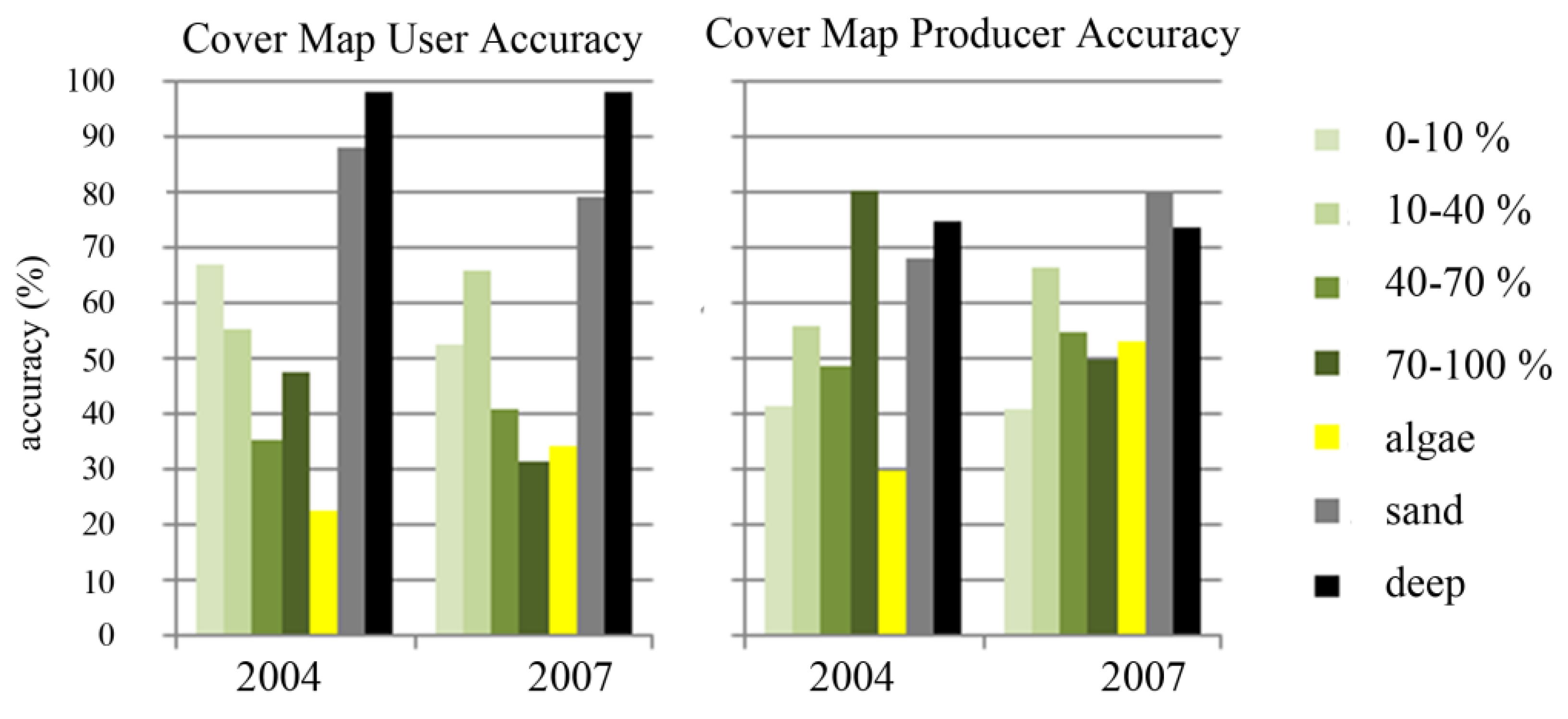
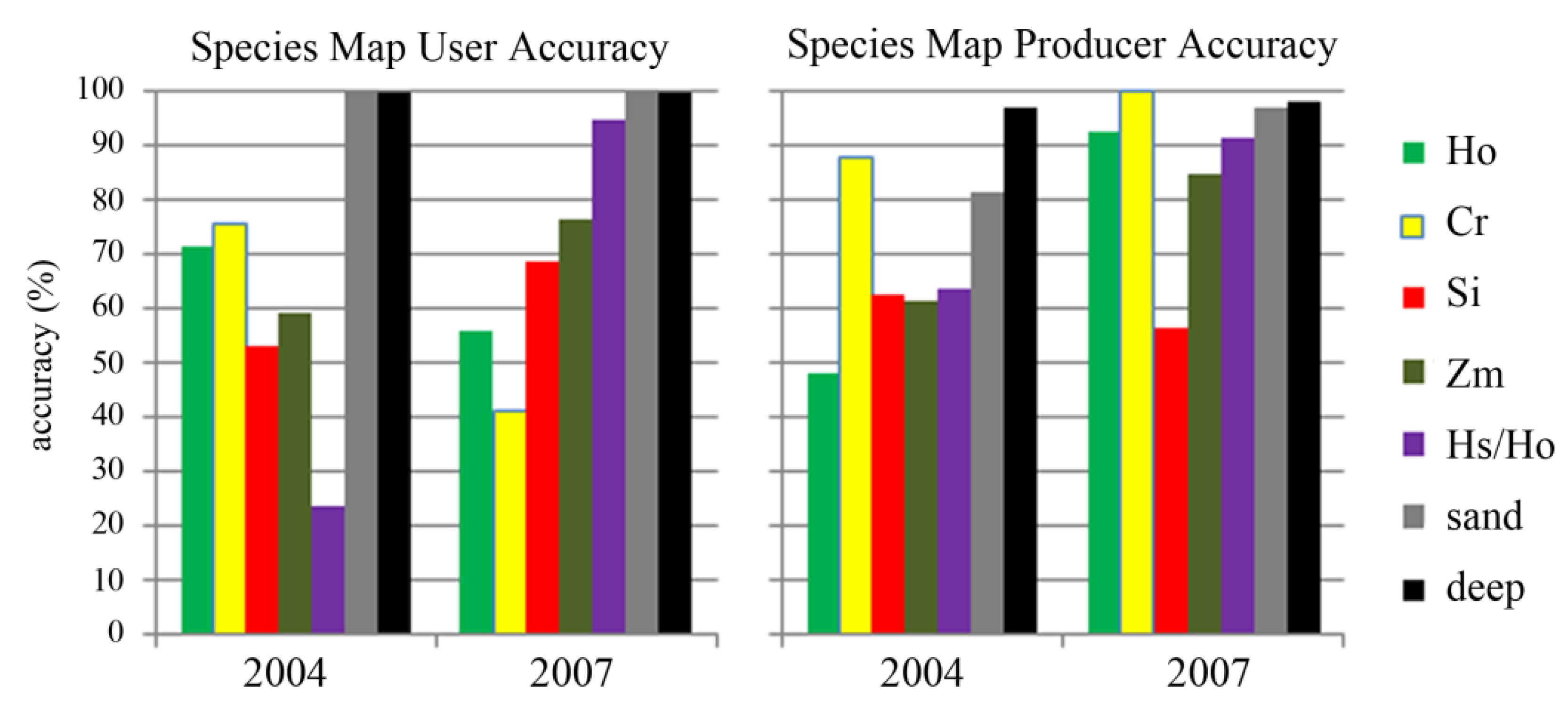
3.2.3. Accuracy Assessment of Seagrass Cover and Species Maps



- Differences in the image data, as it is possible that physical differences in atmospheric and air-water interface conditions or differences in pre-processing (particularly atmospheric correction) resulted in the 2007 image data variance, to some degree, being more suited to separating the discrete seagrass classes, resulting in a higher map accuracy.
- Differences in tidal stage, as the tide is approximately 0.6 m lower in the 2007 image, which cannot be explicitly accounted for by corrections. As a result the 2007 image data may be more suitable to separating cover type and cause less confusion between cover types.
- Difference in field data transect collection methods, as the 2004 field data was collected along many short transects with a high spatial coverage of the mapping extent, compared to the 2007 field data, which was collected along several longer transects with a lower spatial coverage of the mapping extent.
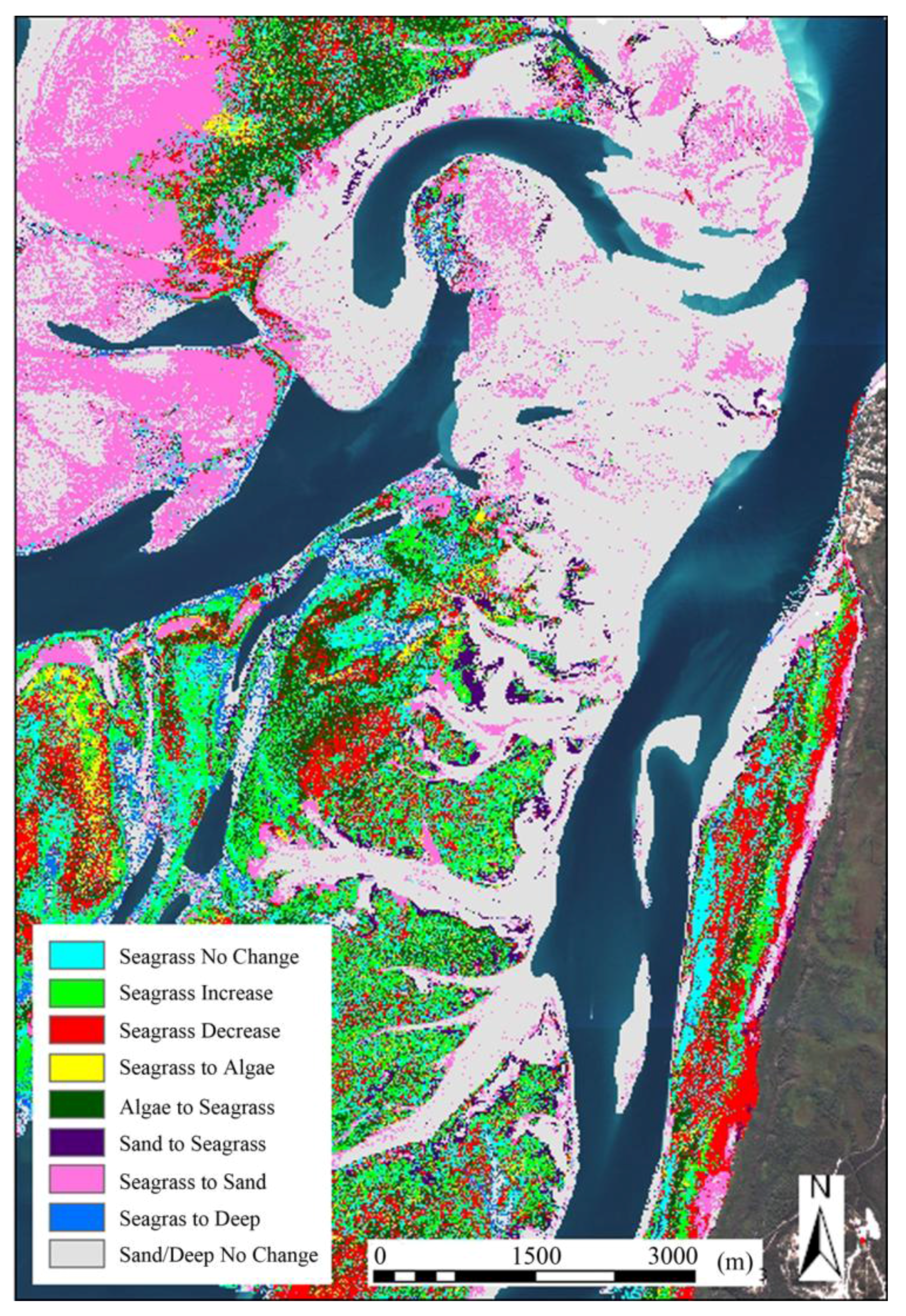
3.2.4. Seagrass Cover Change Detection

| Numbers equal percentage (%) of total image area | 2004 | |||||||
|---|---|---|---|---|---|---|---|---|
| SG 0–10% | SG 10–40% | SG 40–70% | SG 70–100% | SG&MA | SAND | DEEP | ||
| 2007 | SG 0–10% | 1.03177 | 5.400157 | 2.08834 | 0.333111 | 1.585643 | 0.809072 | 0.003379 |
| SG 10–40% | 2.329904 | 7.137612 | 3.29067 | 0.89434 | 2.565081 | 1.265136 | 0.071463 | |
| SG 40–70% | 1.194129 | 5.426235 | 3.164758 | 1.479492 | 2.155099 | 0.699614 | 0.311642 | |
| SG 70–100% | 0.060584 | 0.468454 | 0.715281 | 1.336465 | 0.530358 | 0.047871 | 0.383671 | |
| SG&MA | 0.453855 | 1.03178 | 0.604307 | 0.22009 | 0.589126 | 0.190932 | 0.00113 | |
| SAND | 2.907038 | 7.097542 | 4.668984 | 0.388433 | 0.391735 | 29.42145 | 0.830826 | |
| DEEP | 0.015427 | 0.4878 | 0.853162 | 0.629457 | 0.003095 | 0.537121 | 1.897379 | |
3.2.5. Species Composition Change Detection
4. Conclusions
4.1. Bathymetry Mapping
4.2. Seagrass Mapping
4.3. Final Remarks
Acknowledgements
References and Notes
- Larkum, A.; Orth, R.; Duarte, C.M. Seagrasses: Biology, Ecology and Conservation; Springer: Dordrecht, The Netherlands, 2006. [Google Scholar]
- Frost, M.T.; Rowden, A.A.; Attrill, M.J. Effect of habitat fragmentation on the macroinvertebrate infaunal communities associated with the seagrass Zostera marina L. Aquat. Conserv. Marine Freshwater Ecosyst. 1999, 9, 255–263. [Google Scholar] [CrossRef]
- Short, F.; Coles, R. Global Seagrass Research Methods; Elsevier: Amsterdam, The Netherlands, 2001. [Google Scholar]
- Green, E.P.; Mumby, P.J.; Edwards, A.J.; Clark, C.D. Remote Sensing Handbook for Tropical Coastal Management; UNESCO: Paris, France, 2000. [Google Scholar]
- Dekker, A.G.; Brando, V.; Anstee, J. Retrospective seagrass change detection in a shallow coastal tidal Australian lake. Remote Sens. Environ. 2005, 97, 415–433. [Google Scholar] [CrossRef]
- Dierssen, H.M.; Zimmerman, R.C.; Leathers, R.A.; Downes, T.V.; Davis, C.O. Ocean color remote sensing of seagrass and bathymetry in the Bahamas Banks by high-resolution airborne imagery. Limnol. Oceanogr. 2003, 48, 444–455. [Google Scholar] [CrossRef]
- McKenzie, L.; Finkbeiner, M.; Kirkman, H. Seagrass mapping methods. In Global Seagrass Research Methods; Short, F., Coles, R., Eds.; Elsevier: Amsterdam, The Netherlands, 2001. [Google Scholar]
- Phinn, S.; Roelfsema, C.; Dekker, A.; Brando, V.; Anstee, J. Mapping seagrass species, cover and biomass in shallow waters: An assessment of satellite multi-spectral and airborne hyper-spectral imaging systems in Moreton Bay (Australia). Remote Sens. Environ. 2008, 112, 3413–3425. [Google Scholar] [CrossRef]
- Roelfsema, C.M.; Phinn, S.R.; Udy, N.; Maxwell, P. An Integrated Field and Remote Sensing Approach for Mapping Seagrass Cover, Moreton Bay, Australia. J. Spatial Sci. 2009, 54, 45–62. [Google Scholar] [CrossRef]
- Armstrong, R.A. Remote sensing of submerged vegetation canopies for biomass estimation. Int. J. Remote Sens. 1993, 14, 10–16. [Google Scholar] [CrossRef]
- Benfield, S.L.; Guzman, H.M.; Mair, J.M.; Young, J.A.T. Mapping the distribution of coral reefs and associated sublittoral habitats in Pacific Panama: A comparison of optical satellite sensors and classification methodologies. Int. J. Remote Sens. 2007, 28, 5047–5070. [Google Scholar] [CrossRef]
- Fyfe, S.K. Spatial and temporal variation in spectral reflectance: Are seagrass species spectrally distinct? Limnol. Oceanogr. 2003, 48, 464–479. [Google Scholar] [CrossRef]
- Mumby, P.J.; Green, E.P.; Edwards, A.J.; Clark, C.D. The cost-effectiveness of remote sensing for tropical coastal resources assessment and management. J. Environ. Manage. 1999, 55, 157–166. [Google Scholar] [CrossRef]
- Dennison, W.C.; Abal, E.G. Moreton Bay Study: A Scientific Basis for the Healthy Waterways Campaign; South East Qld Regional Water Quality Management Strategy Team: Brisbane, QLD, Australia, 1999. [Google Scholar]
- Hyland, S.J.; Courtney, A.F.; Butler, C.J. Distribution of Seagrass in the Moreton Region from Coolangatta to Noosa; Queensland Department of Primary Industries: Brisbane, QLD, Australia, 1989.
- Zharikov, Y.; Skilleter, G.; Loneragan, N.; Taranto, T.; Cameron, B. Mapping and characterising subtropical estuarine landscapes using aerial photography and GIS for potential application in wildlife conservation and management. Biol. Conserv. 2005, 125, 87–100. [Google Scholar] [CrossRef]
- Hogrefe, K.; Wright, D.; Hochberg, E.J. Derivation and integration of shallow-water bathymetry: Implications for coastal terrain modeling and subsequent analyses. Marine Geodesy 2008, 31, 299–317. [Google Scholar] [CrossRef]
- Mumby, P.J.; Clark, C.D.; Green, E.P.; Edwards, A.J. Benefits of water column correction and contextual editing for mapping coral reefs. Int. J. Remote Sens. 1998, 19, 203–210. [Google Scholar] [CrossRef]
- Stumpf, R.P.; Holderied, K.; Sinclair, M. Determination of water depth with high-resolution satellite imagery over variable bottom types. Limnol. Oceanogr. 2003, 48, 547–556. [Google Scholar] [CrossRef]
- Lyzenga, D.R. Passive remote sensing techniques for mapping water depth and bottom features. Appl. Opt. 1978, 17, 379–383. [Google Scholar] [CrossRef] [PubMed]
- Van Hengel, W.; Spitzer, D. Multi-temporal water depth mapping by means of Landsat TM. Int. J. Remote Sens. 1991, 12, 703–712. [Google Scholar] [CrossRef]
- Roelfsema, C.M.; Joyce, K.E.; Phinn, S.R. Evaluation of benthic survey techniques for validating remotely sensed images of coral reefs. In Proceedings of 12th International Coral Reefs Symposium, Okinawa, Japan, 2004; International Coral Reef Society: Okinawa, Japan, 2004. [Google Scholar]
- Brando, V.; Dekker, A.G. Satellite hyperspectral remote sensing for estimating estuarine and coastal water quality. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1378–1387. [Google Scholar] [CrossRef]
- Phinn, S.R.; Dekker, A.G.; Brando, V.; Roelfsema, C. Mapping water quality and substrate cover in optically complex coastal and reef waters: An integrated approach. Marine Pollut. Bull. 2005, 51, 459–469. [Google Scholar] [CrossRef] [PubMed]
- Green, E.P.; Edwards, A.J.; Mumby, P.J. Mapping bathymetry. In Remote Sensing Handbook for Tropical Coastal Management; Edwards, A.J., Ed.; UNESCO: Paris, France, 2000. [Google Scholar]
- Philpot, W.D. Bathymetric mapping with passive multispectral imagery. Appl. Opt. 1989, 28, 1569–1578. [Google Scholar] [CrossRef] [PubMed]
- Congalton, R.; Green, K. Basic analysis techniques. In Assessing the Accuracy of Remotely Sensed Data: Principles and Practices; Congalton, R., Green, K., Eds.; CRC Press: Boca Raton, FL, USA, 1999; Chapter 5. [Google Scholar]
- Brando, V.E.; Anstee, J.M.; Wettle, M.; Dekker, A.G.; Phinn, S.R.; Roelfsema, C. A physics based retrieval and quality assessment of bathymetry from suboptimal hyperspectral data. Remote Sens. Environ. 2009, 113, 755–770. [Google Scholar] [CrossRef]
- EHMP. Ecosystem Health Monitoring Program 2006–2007 Annual Technical Report; Moreton Bay Waterways and Catchments Partnership: Brisbane, QLD, Australia, 2008; p. 93. [Google Scholar]
- Lyons, M.B.; Phinn, S.R.; Roelfsema, C.M. Long Term Monitoring of Seagrass Distribution in Moreton Bay, Australia, from 1972 to 2010 Using Landsat MSS, TM, ETM+. In Proceedings of the 30th International Symposium on Geoscience and Remote Sensing, Honolulu, HI, USA; July 25–30, 2010. [Google Scholar]
© 2011 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Lyons, M.; Phinn, S.; Roelfsema, C. Integrating Quickbird Multi-Spectral Satellite and Field Data: Mapping Bathymetry, Seagrass Cover, Seagrass Species and Change in Moreton Bay, Australia in 2004 and 2007. Remote Sens. 2011, 3, 42-64. https://doi.org/10.3390/rs3010042
Lyons M, Phinn S, Roelfsema C. Integrating Quickbird Multi-Spectral Satellite and Field Data: Mapping Bathymetry, Seagrass Cover, Seagrass Species and Change in Moreton Bay, Australia in 2004 and 2007. Remote Sensing. 2011; 3(1):42-64. https://doi.org/10.3390/rs3010042
Chicago/Turabian StyleLyons, Mitchell, Stuart Phinn, and Chris Roelfsema. 2011. "Integrating Quickbird Multi-Spectral Satellite and Field Data: Mapping Bathymetry, Seagrass Cover, Seagrass Species and Change in Moreton Bay, Australia in 2004 and 2007" Remote Sensing 3, no. 1: 42-64. https://doi.org/10.3390/rs3010042
APA StyleLyons, M., Phinn, S., & Roelfsema, C. (2011). Integrating Quickbird Multi-Spectral Satellite and Field Data: Mapping Bathymetry, Seagrass Cover, Seagrass Species and Change in Moreton Bay, Australia in 2004 and 2007. Remote Sensing, 3(1), 42-64. https://doi.org/10.3390/rs3010042