An Object Model for Integrating Diverse Remote Sensing Satellite Sensors: A Case Study of Union Operation



Abstract
:
1. Introduction
2. Object Model of Remote Sensing Satellite Sensors
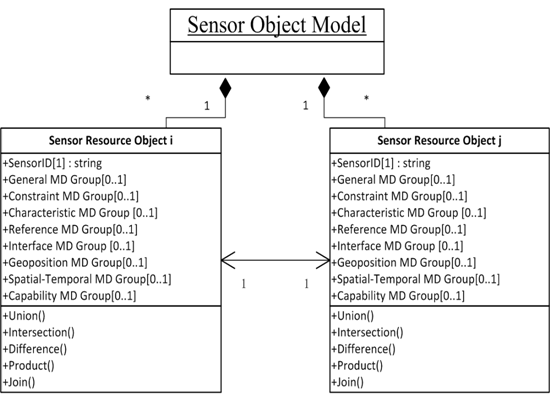
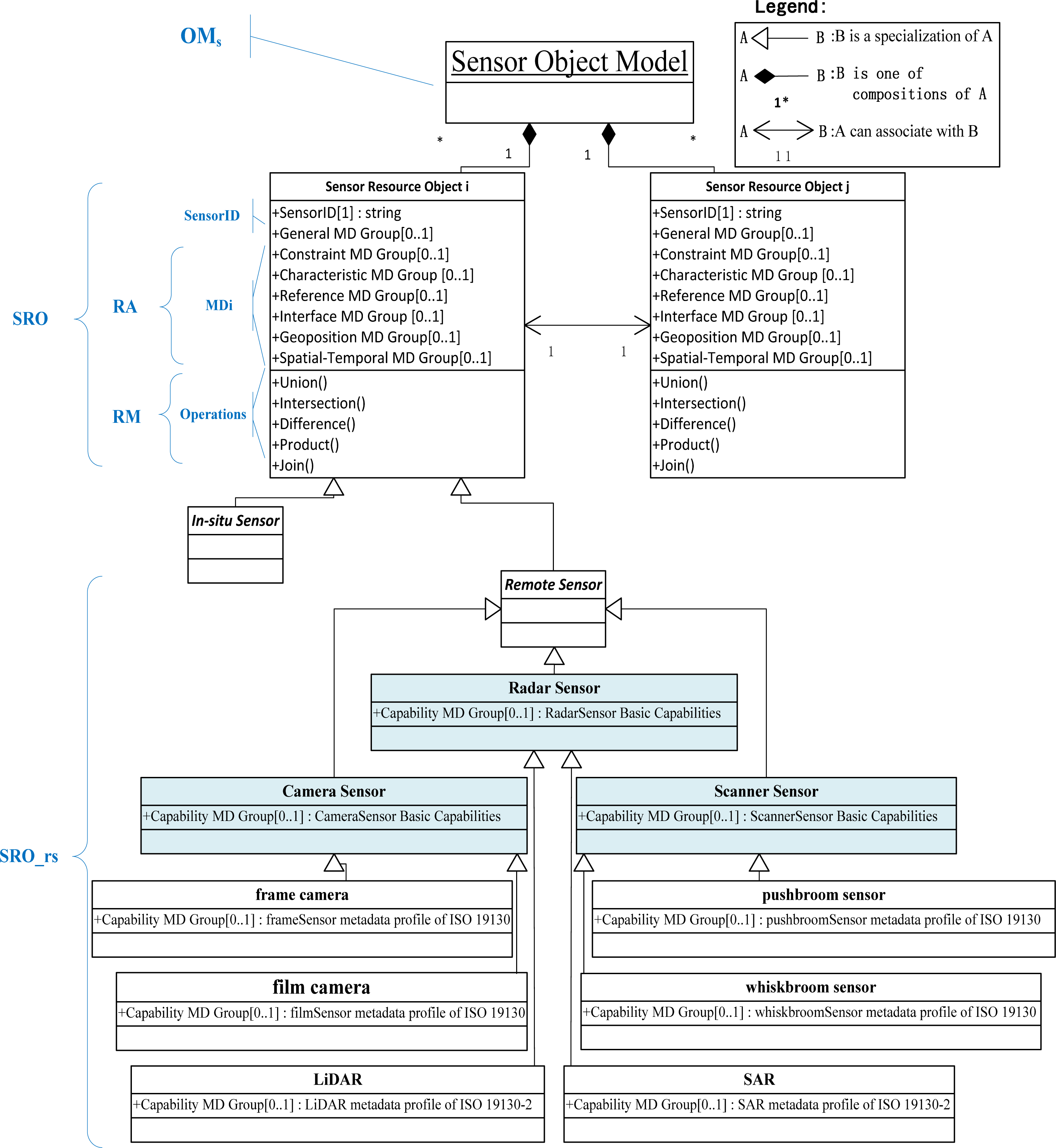
2.1. Conceptual Level of the Proposed Object Model
2.2. Remote Sensor Resource Attribute of SRO_rs
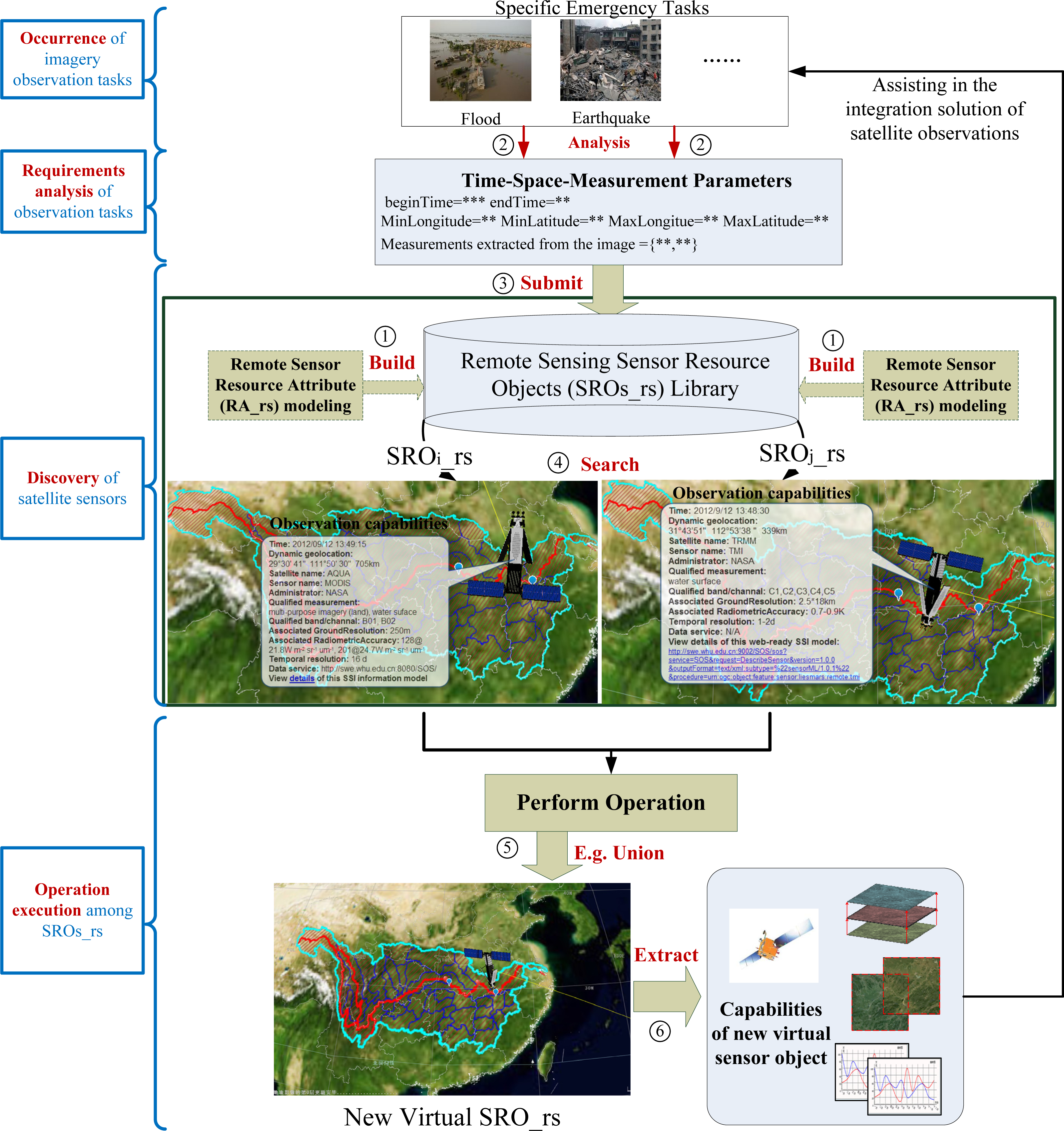
2.3. Remote Sensor Resource Operations
- SRO'_rs = SRO1_rs ∪ SRO2_rs ≡ {t | t ∈ SRO1_rs ∨ t ∈ SRO2_rs}, where t is the meta-attribute variable of SRO′_rs. This operation is the union between two SRO_rs instances. SRO′_rs is the new SRO_rs that contains the comprehensive sensor observing capacity of SRO1_rs and SRO2_rs.
- SRO'_rs = SRO1_rs ∩ SRO2_rs ≡ {t | t ∈ SRO1_rs ∧ t ∈ SRO2_rs}, where t is the meta-attribute variable of SRO'_rs. This operation is the intersection between the two SRO_rs instances. SRO'_rs is the current new SRO_rs having commonality between SRO1_rs and SRO2_rs.
- SRO'_rs = SRO1_rs − SRO2_rs ≡ {t | t ∈ SRO1_rs ∧ t ∉ SRO2_rs}, where t is the meta-attribute variable of SRO'_rs. This operation is the difference between the two SRO_rs instances. SRO'_rs is the current new SRO_rs having sensor observation system meta-attributes that are present in SRO1_rs but not in SRO2_rs.
- SRO'_rs = SRO1_rs × SRO2_rs ≡ {t | t = <t1, t2> ∧ t1 ∈ SRO1_rs ∧ t2 ∈ SRO2_rs}, where t1 and t2 are the meta-attribute variables of SRO'_rs. We assume that SRO1_rs has n-ary meta-attribute columns, and SRO2_rs has m-ary meta-attribute columns. This operation is the product of the two SRO_rs instances. SRO'_rs is the new SRO_rs wherein the first n-ary meta-attribute columns are the meta-attributes of SRO1_rs, and the succeeding m-ary meta-attribute columns are the meta-attributes of SRO2_rs.
- SRO'_rs = SRO1_rs ⋈ SRO2_rs ≡ {t | t = <t1, t2> ∧ t1 ∈ SRO1_rs ∧ t2 ∈ SRO2_rs ∧ t1 [B] = t2[B]}, where t1 and t2 are the meta-attribute variables of SRO'_rs. SRO1_rs and SRO2_rs have the same meta-attribute column , i.e., B is the common meta-attribute of these two SRO_rs instances and denotes the natural join operation derived from the product operation. SRO'_rs is the current new sensor resource object wherein the common/repeated meta-attribute column has been deleted. If the repeated meta-attributes have s (integer) columns, the first n-ary meta-attribute columns in SRO'_rs are the meta-meta-attributes of SRO1_rs. The succeeding (m-s)-ary meta-attribute columns are the meta-attributes of SRO2_rs.
2.4. Union Operation Algorithm Design

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input: remote sensor attribute state description s1 (RA1_rs) of SRO1_rs remote sensor attribute state description s2 (RA2_rs) of SROs_rs Output: new sensor description s' (RA'_rs) of remote sensor resource object SRO'_rs Use: compare(s1,s2) returns true if SRO'_rs and SRO'_rs are homogenous sensor type addAttr(s1.MDx Instance, s2.MDx Instance) performs the combination of two equal meta-attribute nodes reassign (ID) returns the new unique ID to s' Declare: SensorObjectInFormsOfSensorAttributeStateDescription s1, s2, s'; MDx struct MDx Instance; Begin: Union 1: If (s1!= empty && s2!= empty) do 2: Judge whether two sensors are the homogenous type using compare algorithm 3: If compare(s1,s2) then 4: { reassign (ID); 5: Foreach (MDx in {MDG, MDC, MDCT, MDCP, MDR, MDST, MDGP, MDI}) do 6: Logically merge the equal meta-attribute node and its value of two raw SRO_rs instances into s'; 7: i.e., s'. MDCT Instance = addAttr(s1. MDCT Instance, s2. MDCT Instance) do 8: {s'. MDCT Instance.Band(s)Resolution = s1. MDCT Instance.Band(s)Resolution + s2. MDCT Instance.Band(s)Resolution; s'. MDCT Instance.Band(s) MainApplication = s1. MDCT Instance.Band(s) MainApplication + s2. MDCT Instance.Band(s)MainApplication ; 9: {then, the same way to combine the other elements inside MDx Instance}} 10: In all, {s'. MDx Instance = addAttr(s1. MDx Instance, s2. MDx Instance)}; 11: } 12: End If 13: Return s' 14: End If End Union |
| Input: the same with Union algorithm Output: the Boolean value returned by Compare(s1,s2) function Use: StatisticAttributeCount(s) returns the count of unrepeated meta-attribute nodes StatisticAttributeValue(s) returns the values of meta-attribute nodes Compare(MDx struct.Instance MDx struct.Instance) is elaborated in the later Declare: static int N= 0; int M=0; Struct MDx struct; MDG struct MDG Instance; MDG Instance.UniqueID = “NAN”; MDG Instance.SensorType = “NAN”; … Begin: Compare 1: Initialize two remote sensor objects in forms of RA_rs, including account the number of unrepeated meta-attribute nodes and read the value of each node. Do 2: N= StatisticAttributeCount(s1) ; M=StatisticAttributeCount(s2); 3: StatisticAttributeValue(s1) ; StatisticAttributeValue(s1) ; 4: If (N=M) then 5: {{Foreach (MDx in {MDG, MDC, MDCP, MDR, MDST, MDGP, MDI}) do 6: Compare whether each meta-attribute node of s1 has the equal node in s2. 7: i.e., Compare(s1.MDG Instance, s2.MDG Instance) do 8: { bool flag1, flag2; 9: flag1 = (s1.MDG Instance. UniqueID == “NAN”); 10: flag2 = (s2.MDG Instance. UniqueID == “NAN”); 11: if (!(flag1 && flag2)) return false; 12: flag1 = (s1.MDG Instance. SensorType == “NAN”); 13: flag2 = (s2.MDG Instance. SensorType == “NAN”); 14: if (!(flag1 && flag2)) return false; 15: {the determination of the other elements inside MDG Instance is the same way as above} 16: Return true;} } 17: When MDx ==MDCT, the Compare(s1.MDCT Instance, s2.MDCT Instance) function, in addition to perform the similar steps of above compare() function, it has the following determination: 18: {If((s1. MDCT Instance.PlatformHeight == s2.MDCT Instance.PlatformHeight) && (s1. MDCT Instance.Ismobile == s2.MDCT Instance. Ismobile) && (s1. MDCT Instance. Measures == s2.MDCT Instance. Measures)), Return true; 19: Else { s1 and s2 are the heterogeneous sensor type, compare(s1,s2)==false }, Return false;; 20: End if} 21: In all, foreach(MDx in {MDG, MDC, MDCT, MDCP, MDR, MDST, MDGP, MDI}) do If (Compare(s1.MDx Instance, s2.MDx Instance)) Return true; 22: Else { s1 and s2 are the heterogeneous sensor type, compare(s1,s2)==false }, Return false;; 23: End If 24: } 25: Else { s1 and s2 are the heterogeneous sensor type, compare(s1,s2)==false }, Return false; 26: End If End Compare |
3. Instances and Applications
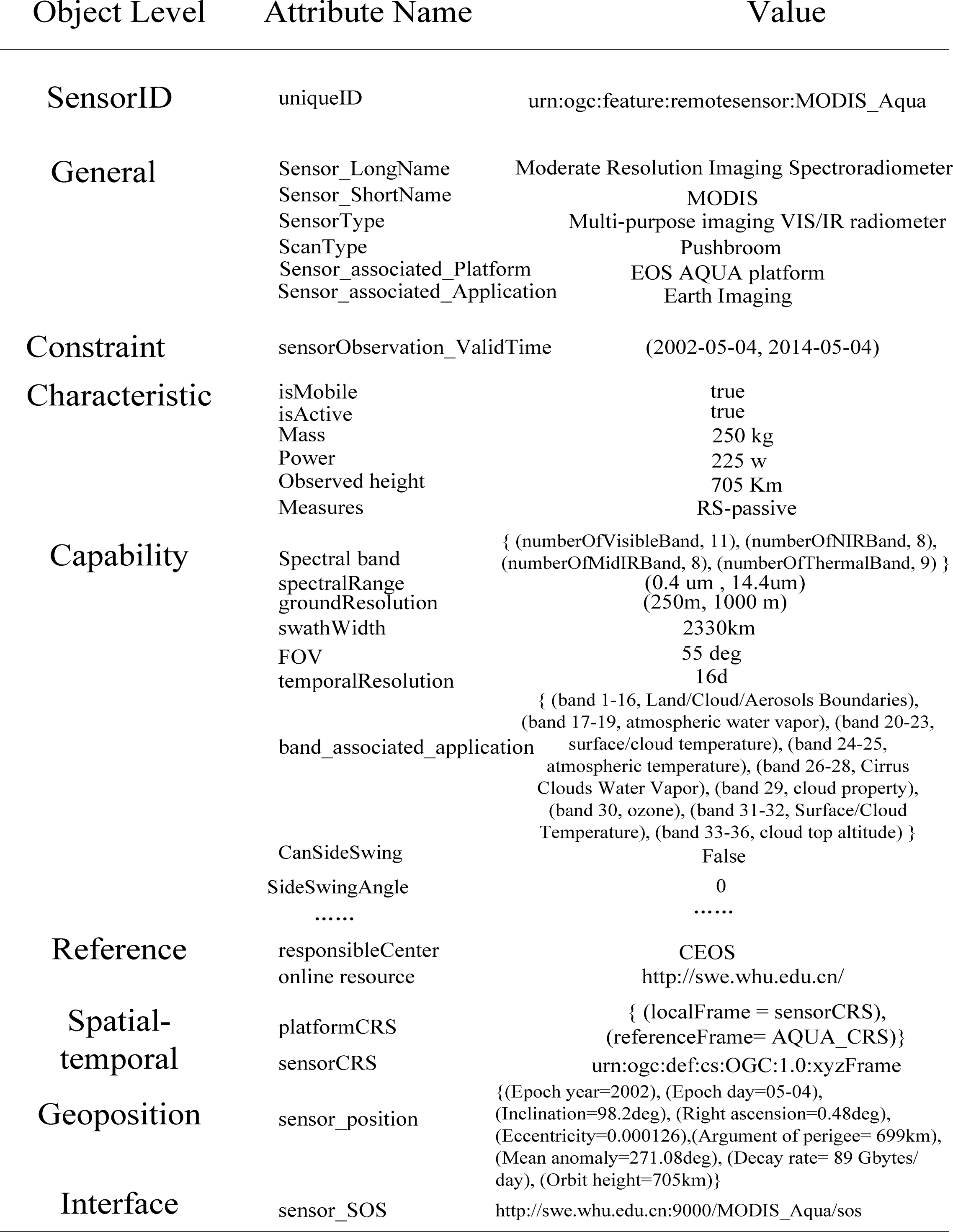
3.1. Scanner SRO_rs Attribute State Information Instance
- Object subclass Capability ( )
- Instance Variables:
- Spectral band (set of ordered pairs of “string-integer”)
- Spectral range (double)
- Ground resolution (integer)
- Temporal resolution (integer)
- Band_associated_application (set of ordered pairs of “string-string”)
- ………
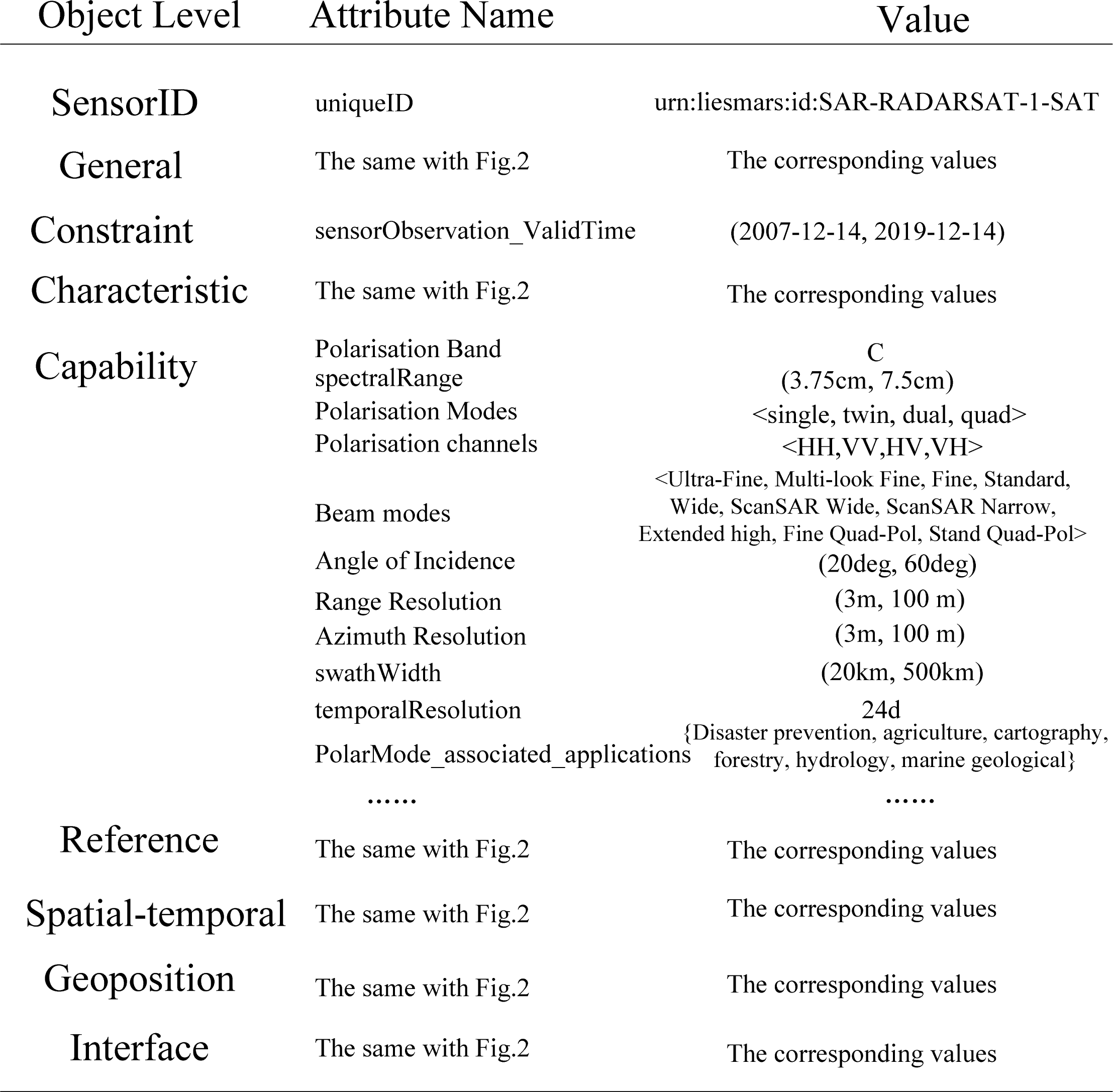
3.2. Radar SRO_rs Attribute State Information Instance
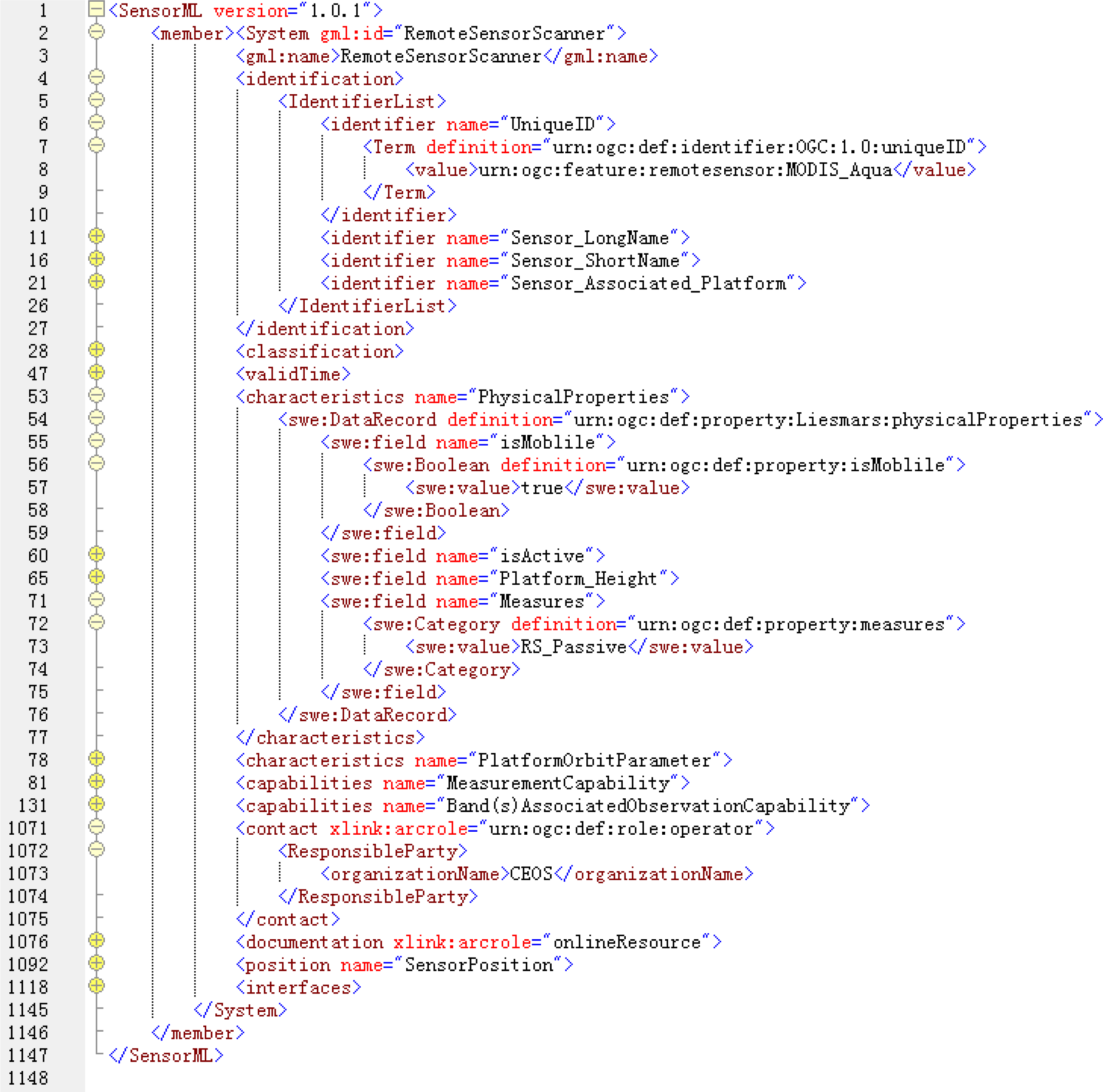
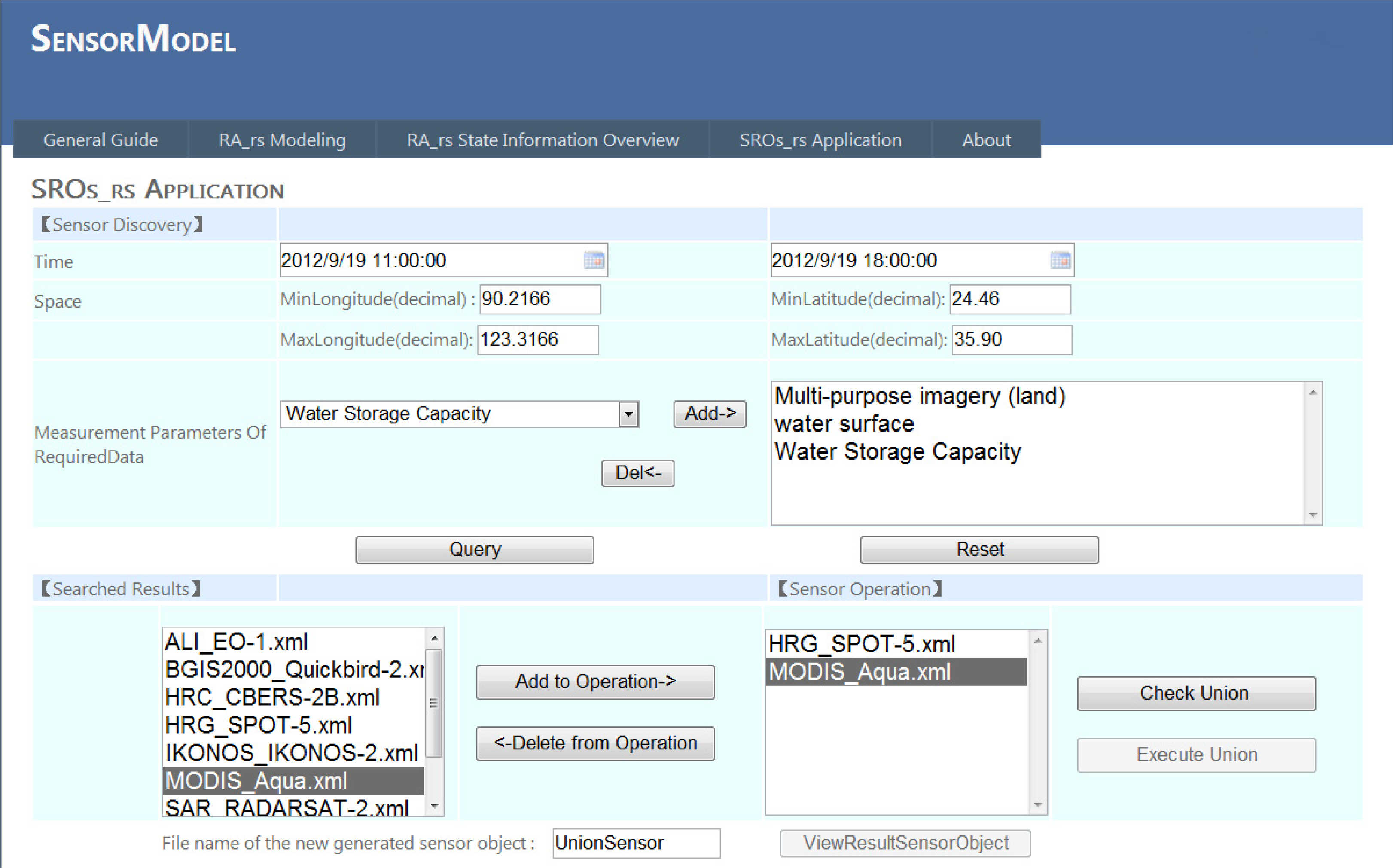
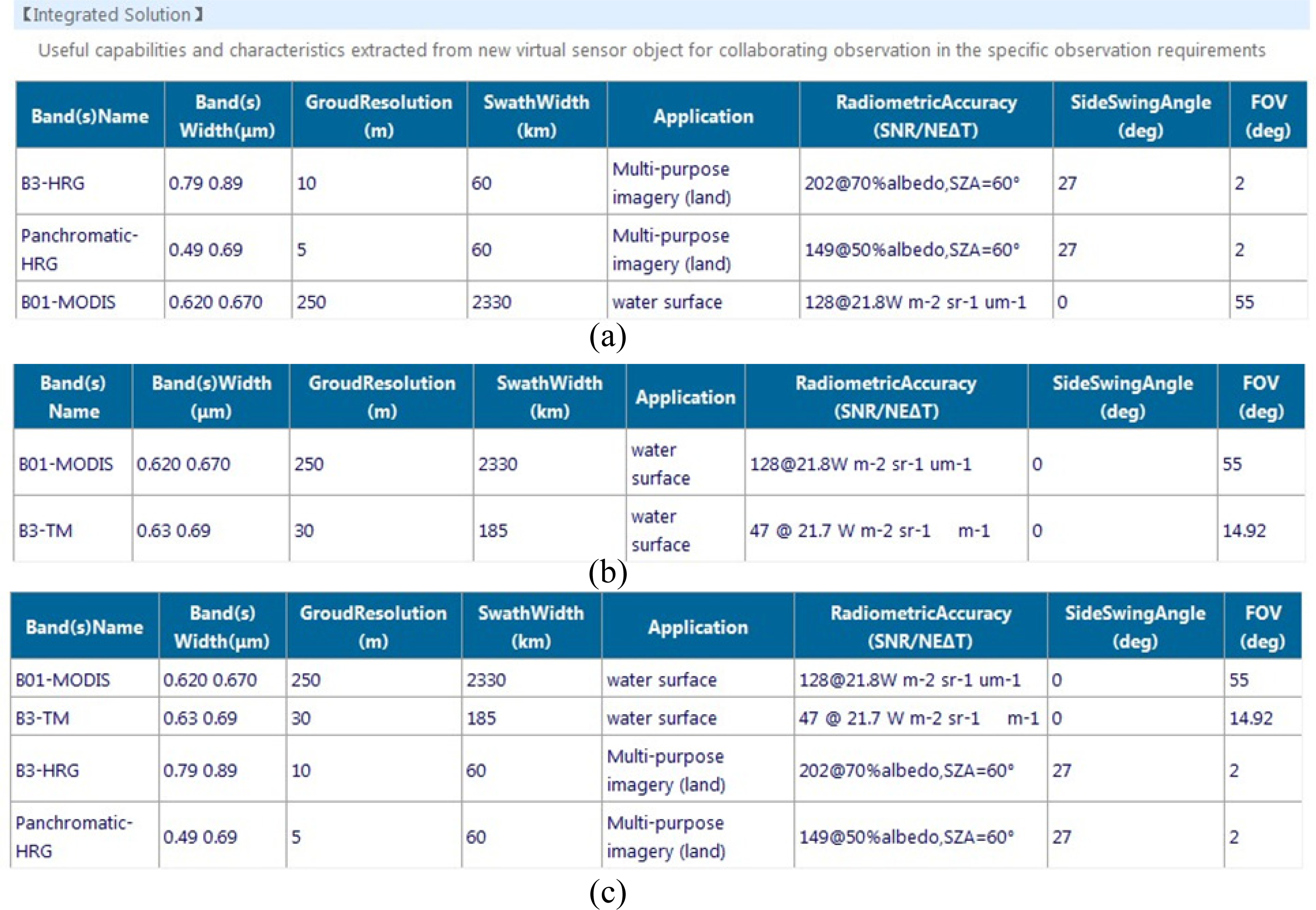
3.3. Object Model Application
4. Discussions
4.1. Feasibility and Versatility of Proposed Object Model
4.2. Conducive to Uniform Management and Integration of Multiple Remote Sensing Satellite Sensors and their Observations
5. Conclusions
List of Abbreviations
| OMs | Sensor Object Model |
| SRO | Sensor Resource Object |
| SensorID | Sensor Identification |
| RA | Resource Attribute |
| RM | Resource Method |
| MD | Metadata |
| SRO_rs | remote sensing Sensor Resource Object |
| SRO1_rs | remote sensing Sensor Resource Object 1 |
| SRO'_rs | new remote sensing Sensor Resource Object |
| OMrs | remote sensing Sensor Object Model |
| RA_rs | remote sensing sensor Resource Attribute |
| RA1_rs | remote sensing sensor Resource 1 Attribute |
| RM_rs | remote sensing sensor Resource Method |
General Metadata group | |
Characteristic Metadata group | |
Capability Metadata group | |
Constraint Metadata group | |
Geoposition Metadata group | |
Spatial-Temporal Metadata group | |
Interface Metadata group | |
Reference Metadata group |
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kambur, D.; Roantree, M.; Murphy, J. An object model for sensor data integration. J. Object Technol 2008, 7, 97–117. [Google Scholar]
- Luo, R.C.; Chang, C.C.; Lai, C.C. Multisensor fusion and integration: Theories, applications, and its perspectives. IEEE Sens. J 2011, 11, 3122–3138. [Google Scholar]
- Bröring, A. Automated On-the-fly Integration of Geosensors with the Sensor Web. Ph.D. Dissertation,. University of Twente: Enschede, The Netherlands, 2012. [Google Scholar]
- Xiong, N.; Svensson, P. Multi-sensor management for information fusion: issues and approaches. Inf. Fusion 2002, 3, 163–186. [Google Scholar]
- Jenkins, K.L.; Castanon, D. Information-Based Adaptive Sensor Management for Sensor Networks. Proceedings of the American Control Conference (ACC), San Francisco, CA, USA, 29 June–1 July 2011; pp. 4934–4940.
- Kreucher, C.; Kastella, K.; Hero, A.O., III. Information based sensor management for multitarget tracking. Proc. SPIE 2003, 5204, 481. [Google Scholar]
- Quartulli, M.; Datcu, M. Information fusion for scene understanding from interferometric SAR data in urban environments. IEEE Trans. Geosci. Remote Sens 2003, 41, 1976–1985. [Google Scholar]
- Aanaes, H.; Sveinsson, J.R.; Nielsen, A.A.; Bovith, T.; Benediktsson, J.A. Model-based satellite image fusion. IEEE Trans. Geosci. Remote Sens 2008, 46, 1336–1346. [Google Scholar]
- Bröring, A.; Echterhoff, J.; Jirka, S.; Simonis, I.; Everding, T.; Stasch, C.; Liang, S.; Lemmens, R. New generation sensor web enablement. Sensors 2011, 11, 2652–2699. [Google Scholar]
- Di, L. Geospatial sensor web and self-adaptive Earth predictive systems (SEPS). Proceedings of the Earth Science Technology Office (ESTO)/Advanced Information System Technology (AIST) Sensor Web Principal Investigator (PI) Meeting, San Diego, CA, USA, 23–24 February 2007; pp. 1–4.
- Blaschke, T.; Hay, G.J.; Weng, Q.; Resch, B. Collective sensing: Integrating geospatial technologies to understand urban systems—An overview. Remote Sens 2011, 3, 1743–1776. [Google Scholar]
- Botts, M. OpenGIS Sensor Model Language (SensorML) Implementation Specification; Open Geospatial Consortium: Wayland, MA, USA, 2007. [Google Scholar]
- Durrant-Whyte, H.F. Sensor models and multisensor integration. Int. J. Robot. Res 1988, 7, 97–113. [Google Scholar]
- Foerster, T.; Bröring, A.; Jirka, S.; Müller, J. Sensor web and geoprocessing services for pervasive advertising. Proceedings of the 2nd Workshop on Pervasive Advertising—In Conjuction with Informatik 2009, Lübeck, Germany, 4–7 September 2009; pp. 88–99.
- Di, L.; Moe, K.; Yu, G. Metadata requirement analysis for the emerging Sensor Web. Int. J. Digit. Earth 2009, 2, 3–17. [Google Scholar]
- Chen, N.; Hu, C. A Sharable and interoperable meta-model for atmospheric satellite sensors and observations. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens 2012, 5, 1519–1530. [Google Scholar]
- Simonis, I.; Echterhoff, J. GEOSS and the Sensor Web; GEOSS Sensor Web Workshop Report; Publisher: Geneva, Switzerland, 2008. [Google Scholar]
- Rob, S. A comparison of the object-oriented and process paradigms. Proceedings of the 1986 SIGPLAN Workshop on Object-Oriented Programming, Yorktown Heights, NY, USA, October 1986.
- Ramsin, R.; Paige, R.F. Process-centered review of object oriented software development methodologies. ACM Comput. Surv 2008, 40, 1–89. [Google Scholar]
- Yang, Q.; Butler, C. An object-oriented model of measurement systems. IEEE Trans. Instrum. Meas 1988, 47, 104–107. [Google Scholar]
- Rumbaugh, J.R.; Blaha, M.R.; Lorensen, W.; Eddy, F.; Premerlani, W. Object-Oriented Modeling and Design; Prentice-hall: Upper Saddle River, NJ, USA, 1990. [Google Scholar]
- Clark, D. Beginning C# Object-Oriented Programming; Apress: New York, NY, USA, 2013. [Google Scholar]
- Bordogna, G.; Pasi, G.; Lucarella, D. A fuzzy Object-Oriented Data model for managing vague and uncertain information. Int. J. Intell. Syst 1999, 14, 623–651. [Google Scholar]
- Lee, K.B.; Song, E.Y. Object-oriented application framework for IEEE 1451.1 standard. Ieee Trans. Instrum. Meas 2005, 54, 1527–1533. [Google Scholar]
- Neuhaus, J.R. An object-oriented sensor and sensor system design. Proceedings of the AIAA Modeling and Simulation Technologies Conference, Montreal, QC, Canada, 6–9 August 2001.
- Di, L.; Kresse, W.; Kobler, B. The current status and future plan of the ISO 19130 project. Proceedings of the XXth ISPRS Congress, Istanbul, Turkey, 12–23 July 2004.
- Matsumoto, S. Echonet: A home network standard. IEEE Pervasive Comput 2010, 9, 88–92. [Google Scholar]
- Chen, N.; Hu, C.; Chen, Y.; Wang, C.; Gong, J. Using SensorML to construct a geoprocessing e-Science workflow model under a sensor web environment. Comput. Geosci 2012, 47, 119–129. [Google Scholar]
- Tang, S.-M.; Yeh, F.-L.; Wang, Y.-L. An efficient algorithm for solving the homogeneous set sandwich problem. Inf. Process. Lett 2001, 77, 17–22. [Google Scholar]
- Chen, C.; Helal, S. Sifting through the jungle of sensor standards. IEEE Pervasive Comput 2008, 7, 84–88. [Google Scholar]
- Object-Oriented approach. Available online: http://en.wikipedia.org/wiki/Class_diagram (accessed on 3 July 2013).
- ISO 19130–2 standard. Available online: http://www.iso.org/iso/iso_catalogue/catalogue_ics/catalogue_detail_ics.htm?ics1=35&ics2=240&ics3=70&csnumber=56113 (accessed on 3 July 2013).
- Liu, Y.; Hill, D.; Rodriguez, A.; Marini, L.; Kooper, R.; Myers, J.; Wu, X.; Minsker, B. A new framework for on-demand virtualization, repurposing and fusion of heterogeneous sensors. Proceedings of the International Symposium on Collaborative Technologies and Systems, 2009, CTS '09, Baltimore, MD, USA, 18–22 May 2009; pp. 54–63.
- Hill, D.J.; Liu, Y.; Marini, L.; Kooper, R.; Rodriguez, A.; Futrelle, J.; Minsker, B.S.; Myers, J.; McLaren, T. A virtual sensor system for user-generated, real-time environmental data products. Environ. Model. Softw 2011, 26, 1710–1724. [Google Scholar]
- Malewski, C.; Simonis, I.; Terhorst, A.; Bröring, A. StarFL–A modularised metadata language for sensor descriptions. Int. J. Digit. Earth 2012. [Google Scholar] [CrossRef]
- How Many Satellites Are Orbiting the Earth? Available online: http://www.studymode.com/essays/How-Many-Satellites-Are-Orbiting-The-1427572.html (accessed on 14 October 2013).
- Jirka, S.; Bröring, A.; Stasch, C. Discovery mechanisms for the sensor web. Sensors 2009, 9, 2661–2681. [Google Scholar]
- Terhorst, A.; Moodley, D.; Simonis, I.; Frost, P.; Mcferren, G.; Roos, S.; Bergh, F. Using the Sensor Web to Detect and Monitor the Spread of Vegetation Fires in Southern Africa. In GeoSensor Networks; Nittel, S., Labrinidis, A., Stefanidis, A., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2008; Volume 4540, pp. 239–251. [Google Scholar]
- NGA Standardization Document, Pushbroom/Whiskbroom Sensor Model Supporting Precise Geopositioning. 2009, p. 89. Available online: www.gwg.nga.mil/documents/csmwg/NGA.SIG.0003.1.0.htm (accessed on 03 January 2014).
- NGA Standardization Document, Spotlight Synthetic Aperture Radar (SAR) Sensor Model Supporting Precise Geopositioning. 2010, p. 86. Available online: http://www.gwg.nga.mil/csmwg_documents.php (accessed on 03 January 2014).
- Bröring, A.; Maué, P.; Janowicz, K.; Nüst, D.; Malewski, C. Semantically-enabled sensor plug & play for the sensor web. Sensors 2011, 11, 7568–7605. [Google Scholar]
- Malewski, C.; Bröring, A.; Maué, P.; Janowicz, K. Semantic matchmaking & mediation for sensors on the sensor web. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens 2013. [Google Scholar] [CrossRef]







| Metadata Group | Main attribute State Elements |
|---|---|
| keyword, sensor ID, sensor type, sensor name, sensor_associated_platform, platform type, platformID, platform name, Sensor_associated_application | |
| sensor observation valid time, sharing level of sensor, responsible center, | |
| mobility, measures, height, mass, power, dimension, | |
| Sensor online resources’ URL | |
| Web service interface | |
| PlatformCRS, SensorCRS | |
| PlatformOribt, platformDynamics |
| Sensor Capabilities | Basic Observation | Observation Geolocation (from ISO 19130 Series) | ||
|---|---|---|---|---|
| Sensor Type | MD Group | |||
| Camera Sensor | frame | Band(s)Name, Band(s)Width, GroundResolution, Band(s)AssociatedApplication, NumberOfSpectralBand, GroundResolutionRange, SpectralRange, TemporalResolution RadiometricAccuracy | Sensor Rotation About X/Y/Z-axis, Sensor Focal Length, Column Spacing, Row Spacing, Various distortions | |
| film | NO developing in 19130 series | |||
| Scanner Sensor | Pushbroom | Band(s)Name, Band(s)Width, GroundResolution, Band(s)AssociatedApplication, NumberOfSpectralBand, GroundResolutionRange, SpectralRange, TemporalResolution RadiometricAccuracy | Row Spacing, Collection Start/Stop Time, Sensor Focal Length, FOV, IFOV, Maximum Scan Angle, Pushbroom scan duration, Whiskbroom scan duration, Whiskbroom pixel scan duration, SwathWidth, CanSideSwing, SideSwingAngle, platform Roll, Pitch, yaw | |
| whiskbroom | ||||
| Radar Sensor | SAR | Mode(s)Name, IncidentAngle, RangeResolution, AzimuthResolution, NumberOfMode, MicrowaveFrequency, PolarizationBand, GroundResolutionRange, TemporalResolution RadiometricAccuracy | SwathWidthRange Line spacing, Sample spacing, Output plane unit vectors, Scene center point (SCP), Scene center point line/sample, Antenna Reference Point (ARP), Position-Velocity Correlation Coefficient, Position-Velocity Decorrelation Rate | |
| LiDAR | NO developing in 19130 series | |||
| SRO_rs | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| SensorID | RA_rs | RM_rs | ||||||||
| SensorID | MDi | Union (MDi) | Intersection (MDi) | Difference (MDi) | Product (MDi) | Join (MDi) | ||||
| UniqueIDi | A_1 | A_2 | A_3 | … | A_n | |||||
| Types | Classification perspective | Classification Value | Instructions about the difference of the meta-attribute | |
|---|---|---|---|---|
| Traditional EO | PlatformHeight | Space |
| |
| Aviation | ||||
| ground | ||||
| OGC Sensor Model Language | Mobility | Fixed |
| |
| Mobile | ||||
| Measures | In-situ | |||
| Remote | active | |||
| passive | ||||
© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Hu, C.; Li, J.; Chen, N.; Guan, Q. An Object Model for Integrating Diverse Remote Sensing Satellite Sensors: A Case Study of Union Operation. Remote Sens. 2014, 6, 677-699. https://doi.org/10.3390/rs6010677
Hu C, Li J, Chen N, Guan Q. An Object Model for Integrating Diverse Remote Sensing Satellite Sensors: A Case Study of Union Operation. Remote Sensing. 2014; 6(1):677-699. https://doi.org/10.3390/rs6010677
Chicago/Turabian StyleHu, Chuli, Jia Li, Nengcheng Chen, and Qingfeng Guan. 2014. "An Object Model for Integrating Diverse Remote Sensing Satellite Sensors: A Case Study of Union Operation" Remote Sensing 6, no. 1: 677-699. https://doi.org/10.3390/rs6010677