Extraction of Urban Power Lines from Vehicle-Borne LiDAR Data

Abstract
:1. Introduction
2. Data Acquisition
2.1. SSW Vehicle-Borne Modeling and Survey System
2.2. Experimental Data
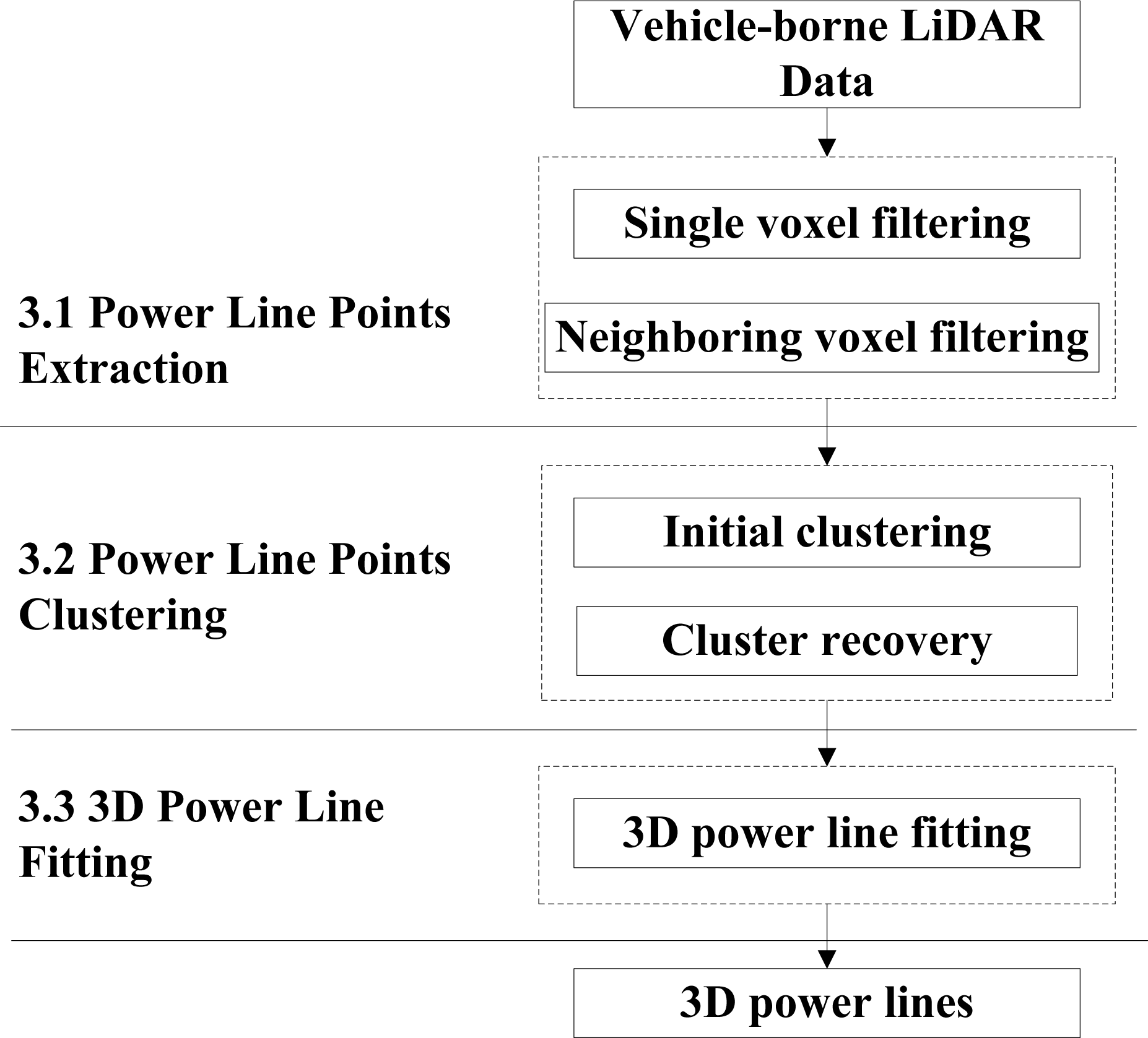
3. Method for Extracting Power Lines from Vehicle-Borne LiDAR Data
3.1. Power Line Points Extraction
3.1.1. Single Voxel Filtering
- Step 1: Filtering ground points. Power line points are non-ground points, so many non-target points will be eliminated by filtering the ground points. For the voxels that correspond to the same plane location, the highest and lowest points in the voxels are obtained and their difference in height is calculated. If the difference is less than a threshold value (1 m), the points are marked as ground points, otherwise they are marked as non-ground points. Here, the threshold value is set as 1 m, and an even smaller threshold value can be set which is determined by the maximal slope of the terrain.
- Step 2: Terrain clearance filtering. Power lines are often above the ground, so the voxels that correspond to power lines are also above the ground. Thus, the ground points obtained in Step 1 can be used to interpolate the approximate ground. As millions of ground points exist, if all points are used for the interpolation, it will be extremely time-consuming. Here, a 2D grid index is created and the ground points within each grid are determined. The average elevation of points in each grid is used for the interpolation. After generation of approximate ground, an elevation threshold is set to filter the points (2 m in this study). If the difference between the lowest point of the voxel and the approximate ground is greater than the elevation threshold, it is retained, otherwise it is eliminated.
- Step 3: Up-down continuity filtering. Up-down continuity refers to the number of voxels with consecutive points in them. Power lines are suspended so there is nothing above or below the power line within a specific space. Thus, the up-down continuity of power line points is relatively low whereas that of buildings, woods, and streetlights is relatively high. The up-down continuity is calculated for each voxel and if the value is less than a threshold (3), it is retained, otherwise it is eliminated. Here, the threshold needs to be set according to the real data source. In some cases, the power lines are very close to ground objects or other power lines, then the threshold should be small, otherwise the threshold can be set a little larger.
- Step 4: Feature eigenvector filtering. Let A be an n × n matrix. The number λ is an eigenvalue of A if there exists a non-zero vector v such that Av = λv. In this case, vector v is called an eigenvector of A corresponding to λ. As for point clouds, eigenvector decomposition can be used for the expression of spatial distribution of the points. Here, eigenvector decomposition is conducted using the 3-D coordinates of the points in the voxels and three eigenvalues are obtained: λ1, λ2, λ3 (λ1 > λ2 > λ3). The different relationships among these three eigenvalues can indicate the distributions of the 3-D points: if λ1≈λ2≈λ3, the points have a discrete distribution; if λ1, λ2 >> λ3, the points have a planar distribution; if λ1 >> λ2, λ3, the points have a linear distribution [31]. Therefore, the linear measurement Linearity = (λ1 − λ2)/λ1 can be defined to measure the distribution of the points in the voxels. If the linearity is higher than a threshold, the voxel is retained, otherwise it is eliminated. Here, the threshold is set as 0.3 after several experiments.
3.1.2. Neighboring Voxel Filtering
- Step 1: Calculate the point density of neighboring voxels with respect to each single voxel and obtain the density interval [Dmin, Dmax] based on the maximum and minimum values of the point density. Set the smallest interval as Ds and divide the point density interval, to obtain the set S = {Sj, j = 1, 2, …, n}, where n = (Dmax − Dmin)/Ds.
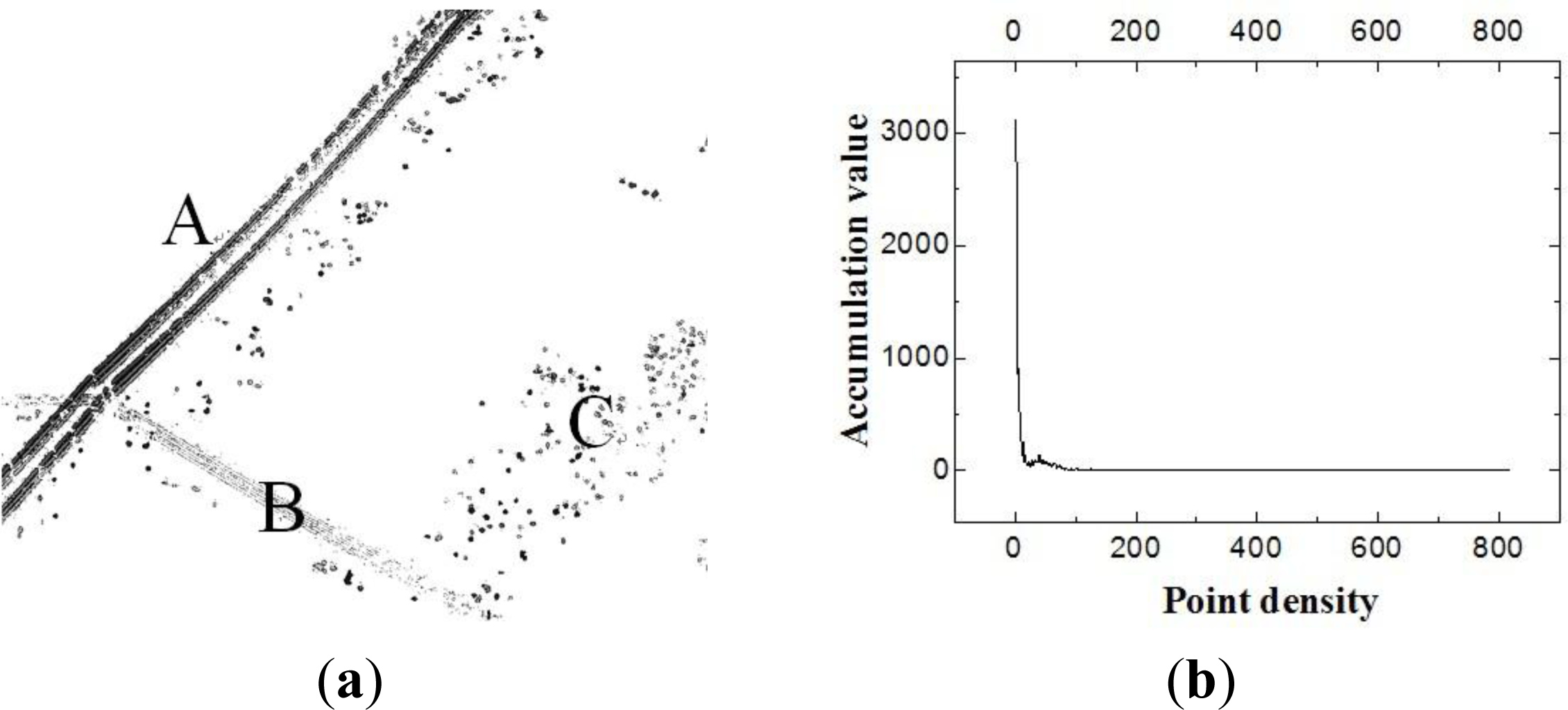
- Step 2: For all of the neighboring voxels, if the point density of a voxel is within the interval Sj, then increase the accumulation value Accj by 1, i.e., Accj = Accj + 1, thereby obtaining the point density accumulation chart, as shown in Figure 4b. In this figure, the peak interval corresponds to the non-power line points and the others correspond to the power line points for the following reasons: (1) In a grid there may be just few points, such as one or two points, in this case they may not be filtered using above single voxel filtering method; (2) Such situations are extremely common in the point cloud.
- Step 3: Based on the point density accumulation curve, calculate the partial derivative and find the peak interval. Eliminate the points inside the grids corresponding to the peak interval and the remained points are power line points.
3.2. Power Line Points Clustering
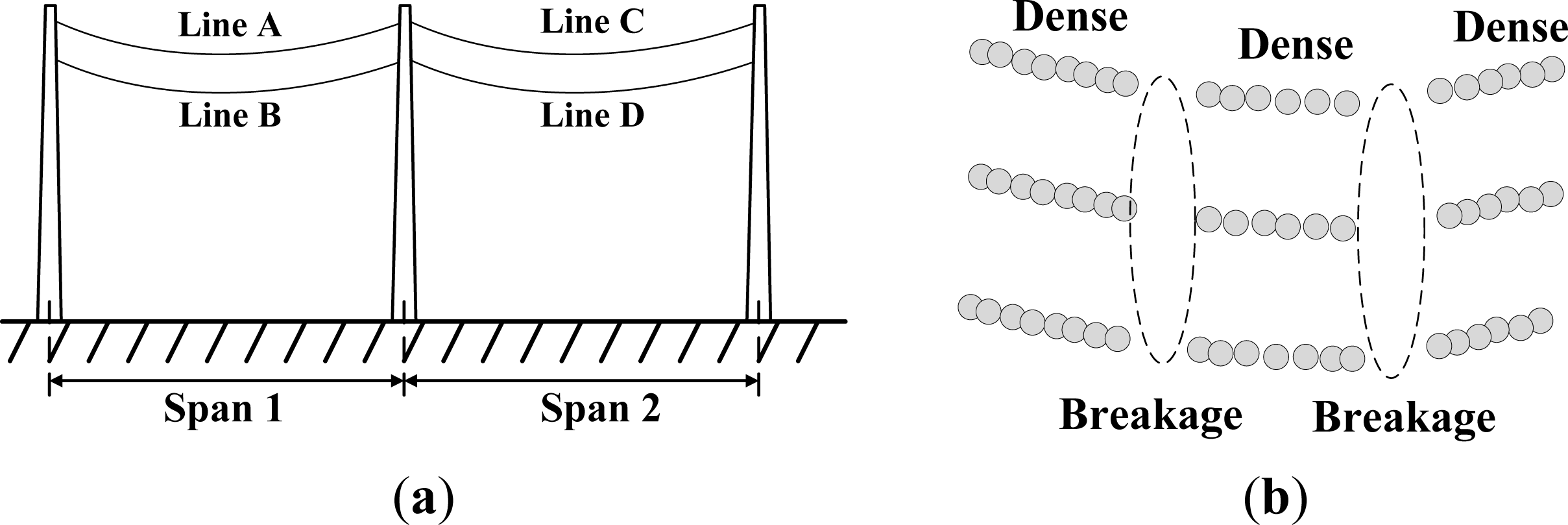
3.2.1. Initial Clustering
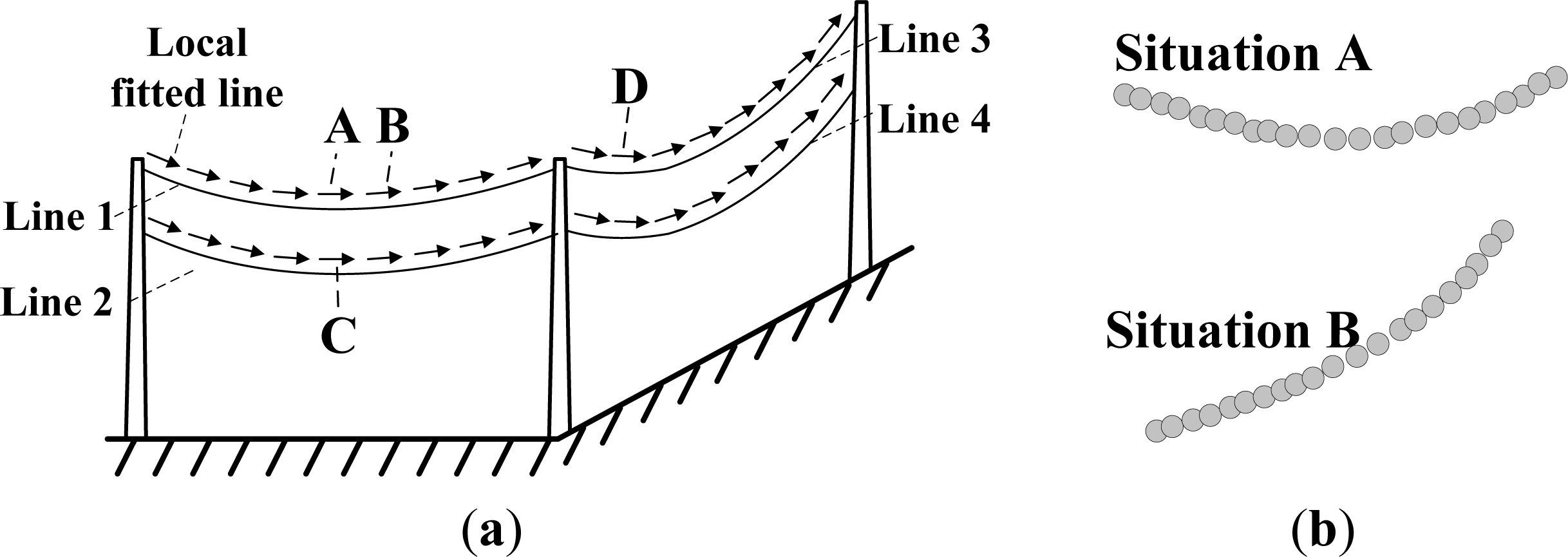
- Step 1: Generation of local fitted straight lines. If there are few points in the initial clusters, the fitting procedure may not be conducted. If the horizontal span of the cluster is large, cases such as those shown in Figure 6b may occur. If all of the points are used to fit the line directly, the fitted line cannot represent the actual distribution characteristics of the cluster. Thus, the initial clusters are divided into three types based on the number of points and the span width. If the number of points is less than a threshold (5), this cluster is not used to fit a line for the reason that large error may exist. If the span width is larger than a threshold (3 m), the points within certain limits (1 m) are used to fit the lines, which represent the extension directions of this cluster. The span width threshold and the limit threshold need to be set according to the sagging posture of power lines. The more obviously the power lines sag, the smaller the thresholds are. For other clusters, all of the points within them are used to fit the line.
- Step 2: Baseline for growing. Select any non-grown fitted line as the baseline and start the growing procedure.
- Step 3: Determination of the straight line that needs to be grown. Calculate the angle between the non-grown lines and the baseline. If the angle is smaller than a certain threshold (10°), rotate the baseline until it is parallel with the fitted line and calculate the vertical distance between the two lines. If the distance is smaller than a threshold (0.2 m), this fitted line is marked as the line to be grown. Here, the angle threshold is set according to the sagging posture of power lines. The more obviously the power lines sag, the larger the angle threshold is. The distance threshold should be set smaller than the distance of up-down power lines.
- Step 4: Growing fitted local straight lines. Merge the points in the current baseline and the line to be grown into one cluster and set the line to be grown as the new baseline. During the growing process, calculate the average vertical distance between the cluster without a local fitted line (filters with few points) and the current baseline. If the distance is less than the lower threshold (0.1 m), merge them. Repeat Steps 2–4 until all of the local fitted lines have completed their growing procedures.
3.2.2. Cluster Recovery
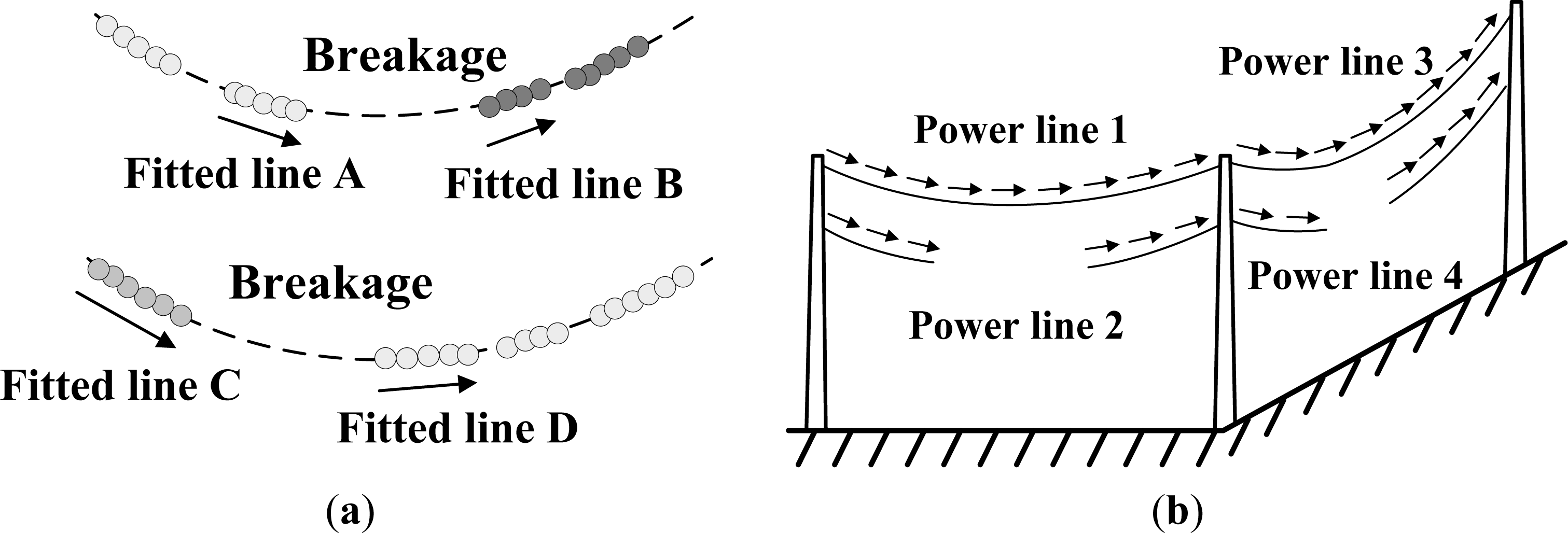
- Step 1: Identification of broken clusters. After completing the clustering of a single power line, the local fitted lines will exhibit a trend like the arrows shown on power lines 1 and 3 in Figure 7b, whereas clusters with breakage will resemble power lines 2 and 4. As for power lines 2, the two fitted local lines of the left line both lie within [−90°, 0°] with those of right line within [0°, 90°]. The same situation appears for power line 4. The broken clusters can be identified based on these characteristics. The local lines (span width 3 m) are fitted on the right and left side of each cluster and if the angles of these two fitted local lines lie within [−90°, 0°] or [0°, 90°], the cluster is a broken cluster. Here the span width threshold needs to be set according to the sagging posture of power lines. The more obviously the power lines sag, the smaller the threshold is.
- Step 2: Recovery of broken clusters. For the current broken cluster, select another broken cluster within the span width. Use the least squares algorithm to fit a parabola to the points in the current broken cluster and other broken clusters, and record the residual. Merge the broken clusters based on the smallest residual and calculate the distance between this fitted model and other broken clusters. If the average distance is less than a threshold (0.1 m), merge them.
- Step 3: Repeat Step 2 for all broken clusters, thereby completing the cluster recovery procedure.
3.3. 3D Power Line Fitting
3.4. Sensitivity Analysis on the Key Parameters
4. Experiments
4.1. Power Line Points Extraction
4.2. Power Line Points Clustering
4.3. Three-Dimensional Power Line Fitting
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ussyshkin, R.V.; Theriault, L.; Sitar, M.; Kou, T. Advantages of Airborne Lidar Technology in Power Line Asset Management. Proceedings of the 2011 International Workshop on Multi-Platform/Multi-Sensor Remote Sensing and Mapping (M2RSM), Xiamen, China, 10–12 January 2011; pp. 1–5.
- Lu, M.L.; Pfrimmer, G.; Kieloch, Z. Upgrading an Existing 138 kV Transmission Line in Manitoba. Proceedings of 2006 IEEE Power Engineering Society General Meeting, Montreal, QC, Canada, 18–22 June 2006; pp. 964–970.
- Koop, J.E. Advanced technology for transmission line modeling. Transm. Distrib. World 2002, 54, 90–93. [Google Scholar]
- Ashidate, S.; Murashima, S.; Fujii, N. Development of a helicopter-mounted eye-safe laser radar system for distance measurement between power transmission lines and nearby trees. IEEE Trans. Power Deliv 2002, 17, 644–648. [Google Scholar]
- Filin, S.; Pfeifer, N. Segmentation of airborne laser scanning data using a slope adaptive neighborhood. ISPRS J. Photogramm. Remote Sens 2006, 60, 71–80. [Google Scholar]
- Jahromi, A.B.; Zoej, M.J.V.; Mohammadzadeh, A.; Sadeghian, S. A novel filtering algorithm for bare-earth extraction from airborne laser scanning data using an artificial neural network. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens 2011, 4, 836–843. [Google Scholar]
- Melzer, T.; Briese, C. Extraction and Modeling of Power Lines from ALS Point Clouds. Proceedings of the 28th Workshop of the Austrian Association for pattern Recognition, Hagenberg, Austria, 17–18 June 2004; pp. 47–54.
- McLaughlin, R.A. Extracting transmission lines from airborne LiDAR data. IEEE Geosci. Remote Sens. Lett 2006, 3, 222–226. [Google Scholar]
- Liu, Y.; Li, Z.; Hayward, R.; Walker, R.; Jin, H. Classification of Airborne Lidar Intensity Data Using Statistical Analysis and Hough Transform with Application to Power Line Corridors. Proceedings of the 2009 Digital Image Computing: Techniques and Applications, Melbourne, Australia, 1–3 December 2009; pp. 462–467.
- Yu, J.; Mu, C.; Feng, Y.; Dou, Y. Powerlines extraction techniques from airborne LiDAR data. Geomat. Inf. Sci. Wuhan Univ 2011, 36, 1275–1279. (In Chinese) [Google Scholar]
- Liang, J.; Zhang, J.; Liu, Z. On extracting power-line from airborne LiDAR point cloud data. Bull. Surv. Mapp 2012, 7, 17–20. (In Chinese) [Google Scholar]
- Jwa, Y.; Sohn, G.; Kim, H.B. Automatic 3D powerline reconstruction using airborne lidar data. Int. Arch. Photogramm. Remote Sens 2009, 38, 105–110. [Google Scholar]
- Jwa, Y.; Sohn, G. A piecewise catenary curve model growing for 3D power line reconstruction. Photogramm. Eng. Remote Sens 2012, 78, 1227–1240. [Google Scholar]
- Ackermann, F. Airborne laser scanning-present status and future expectations. ISPRS J. Photogramm. Remote Sens 1999, 54, 64–67. [Google Scholar]
- Baltsavias, E.P. Airborne laser scanning: Existing systems and firms and other resources. ISPRS J. Photogramm. Remote Sens 1999, 54, 164–198. [Google Scholar]
- Jwa, Y.; Sohn, G. A multi-level span analysis for improving 3D power-line reconstruction performance using airborne laser scanning data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci 2010, 38, 97–102. [Google Scholar]
- Zhang, X.; Chen, G.; Long, W.; Cheng, Z.; Zhang, K. Current status and prospects of helicopter power line inspection tour with LiDAR. Electr. Power Constr 2008, 29, 40–43. [Google Scholar]
- Ou, T.; Geng, X.; Yang, B. Application of vehicle-borne data acquisition system to power line detection. J. Geod. Geodyn 2009, 29, 149–151. [Google Scholar]
- Abdallah, H.; Bailly, J.; Baghdadi, N.N.; Saint-Geours, N.; Fabre, F. Potential of space-borne LiDAR sensors for global bathymetry in coastal and inland waters. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens 2013, 6, 202–216. [Google Scholar]
- Lehtomäki, M.; Jaakkola, A.; Hyyppä, J.; Kukko, A.; Kaartinen, H. Detection of vertical pole-like objects in a road environment using vehicle-based laser scanning data. Remote Sens 2010, 2, 641–664. [Google Scholar]
- Wu, B.; Yu, B.; Yue, W.; Shu, S.; Tan, W.; Hu, C.; Huang, Y.; Wu, J.; Liu, H.X. A voxel-based method for automated identification and morphological parameters estimation of individual street trees from mobile laser scanning data. Remote Sens 2013, 5, 584–611. [Google Scholar]
- Wu, B.; Yu, B.; Yue, W.; Wu, J.; Huang, Y. Voxel-Based Marked Neighborhood Searching Method for Identifying Street Trees Using Vehicle-Borne Laser Scanning Data. Proceedings of the Second International Workshop on Earth Observation and Remote Sensing Applications (EORSA), Shanghai, China, 8–11 June 2012; pp. 327–331.
- Jaakkola, A.; Hyyppä, J.; Hyyppä, H.; Kukko, A. Retrieval algorithms for road surface modelling using laser-based mobile mapping. Sensors 2008, 8, 5238–5249. [Google Scholar]
- Zhu, L.; Hyyppä, J.; Kukko, A.; Kaartinen, H.; Chen, R. Photorealistic building reconstruction from mobile laser scanning data. Remote Sens 2011, 3, 1406–1426. [Google Scholar]
- Jaakkola, A.; Hyyppä, J.; Kukko, A.; Yu, X.; Kaartinen, H.; Lehtomäki, M.; Lin, Y. A low-cost multi-sensoral mobile mapping system and its feasibility for tree measurements. ISPRS J. Photogramm. Remote Sens 2010, 65, 514–522. [Google Scholar]
- Hu, Y.; Li, X.; Xie, J.; Guo, L. A. Novel Approach to Extracting Street Lamps from Vehicle-Borne Laser Data. Proceedings of the 19th International Conference on Geoinformatics, Shanghai, China, 24–26 June 2011; pp. 1–6.
- Lam, J.; Kusevic, K.; Mrstikl, P.; Harrap, R.; Greenspan, M. Urban Scene Extraction from Mobile Ground Based LiDAR Data. Proceedings of the 5th International Symposium on 3D Data Processing, Visualisation and Transmission, Paris, France, 17–20 May 2010; pp. 1–8.
- Biosca, J.M.; Lerma, J.L. Unsupervised robust planar segmentation of terrestrial laser scanner point clouds based on fuzzy clustering methods. ISPRS J. Photogramm. Remote Sens 2008, 63, 84–98. [Google Scholar]
- Yang, B.; Wei, Z.; Li, Q.; Li, J. Automated extraction of street-scene objects from mobile lidar point clouds. Int. J. Remote Sens 2012, 33, 5839–5861. [Google Scholar]
- Aijazi, A.K.; Checchin, P.; Trassoudaine, L. Segmentation based classification of 3D urban point clouds: A super-voxel based approach with evaluation. Remote Sens 2013, 5, 1624–1650. [Google Scholar]
- Kim, H.B.; Sohn, G. 3D classification of power-line scene from airborne laser scanning data using random forests. Int. Arch. Photogramm. Remote Sens 2010, 38, 126–132. [Google Scholar]
- Estivill-Castro, V.; Lee, I. Argument free clustering for large spatial point-data sets via boundary extraction from Delaunay diagram. Comput. Environ. Urban Syst 2002, 26, 315–334. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Threshold | Scale | Setting Basis | ||
|---|---|---|---|---|
| Power line points extraction | Single voxel filtering | Voxel size | [10 cm, distpl] | Data source |
| Ground points | 1 m | Empiric | ||
| Terrain clearance | 2 m | Empiric | ||
| Up-down continuity | 3 | Data source | ||
| Feature eigenvector | 0.3 | Empiric | ||
| Neighboring voxel filtering | Voxel size | 3 × 3 × 3 or 5 × 5 × 5 | Empiric | |
| Point density | Automatic | Calculation | ||
| Power line points clustering | Initial clustering | Point number of local fitted lines | 5 | Empiric |
| Span width of local fitted lines | 3 m | Data source | ||
| Angle of to-be grown lines | 10 g | Data source | ||
| Distance of to-be grown lines | 0.2 m | Empiric | ||
| Cluster recovery | Span width of broken clusters | 3 m | Data source | |
| Distance of to-be merged clusters | 0.1 m | Empiric | ||
| Actual Length | Correct Length | Incorrect Length | Missing Length | Correctness | Completeness | |
|---|---|---|---|---|---|---|
| Result | 4006 | 3764 | 36 | 242 | 99.1% | 93.9% |
| Actual Cluster | Complete Cluster | Over-Clustered | Inadequate Cluster | Missing Cluster | |
|---|---|---|---|---|---|
| Number | 105 | 102 | 0 | 3 | 0 |
| Rate | 100% | 97.2% | 0 | 2.8% | 0 |
| Average (cm) | Maximum (cm) | RMSE (cm) | |
|---|---|---|---|
| Distance | 2.1 | 6.7 | 2.4 |
© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Cheng, L.; Tong, L.; Wang, Y.; Li, M. Extraction of Urban Power Lines from Vehicle-Borne LiDAR Data. Remote Sens. 2014, 6, 3302-3320. https://doi.org/10.3390/rs6043302
Cheng L, Tong L, Wang Y, Li M. Extraction of Urban Power Lines from Vehicle-Borne LiDAR Data. Remote Sensing. 2014; 6(4):3302-3320. https://doi.org/10.3390/rs6043302
Chicago/Turabian StyleCheng, Liang, Lihua Tong, Yu Wang, and Manchun Li. 2014. "Extraction of Urban Power Lines from Vehicle-Borne LiDAR Data" Remote Sensing 6, no. 4: 3302-3320. https://doi.org/10.3390/rs6043302
APA StyleCheng, L., Tong, L., Wang, Y., & Li, M. (2014). Extraction of Urban Power Lines from Vehicle-Borne LiDAR Data. Remote Sensing, 6(4), 3302-3320. https://doi.org/10.3390/rs6043302