Daytime Low Stratiform Cloud Detection on AVHRR Imagery


Abstract
:1. Introduction
2. Characteristics of Low Stratiform Clouds
2.1. Physical Properties of Stratiform Clouds
2.2. Spectral Properties of Stratiform Clouds
3. Overview on Satellite Low Stratiform Cloud/Fog-Detection Algorithms
4. Input Data
4.1. Satellite Data
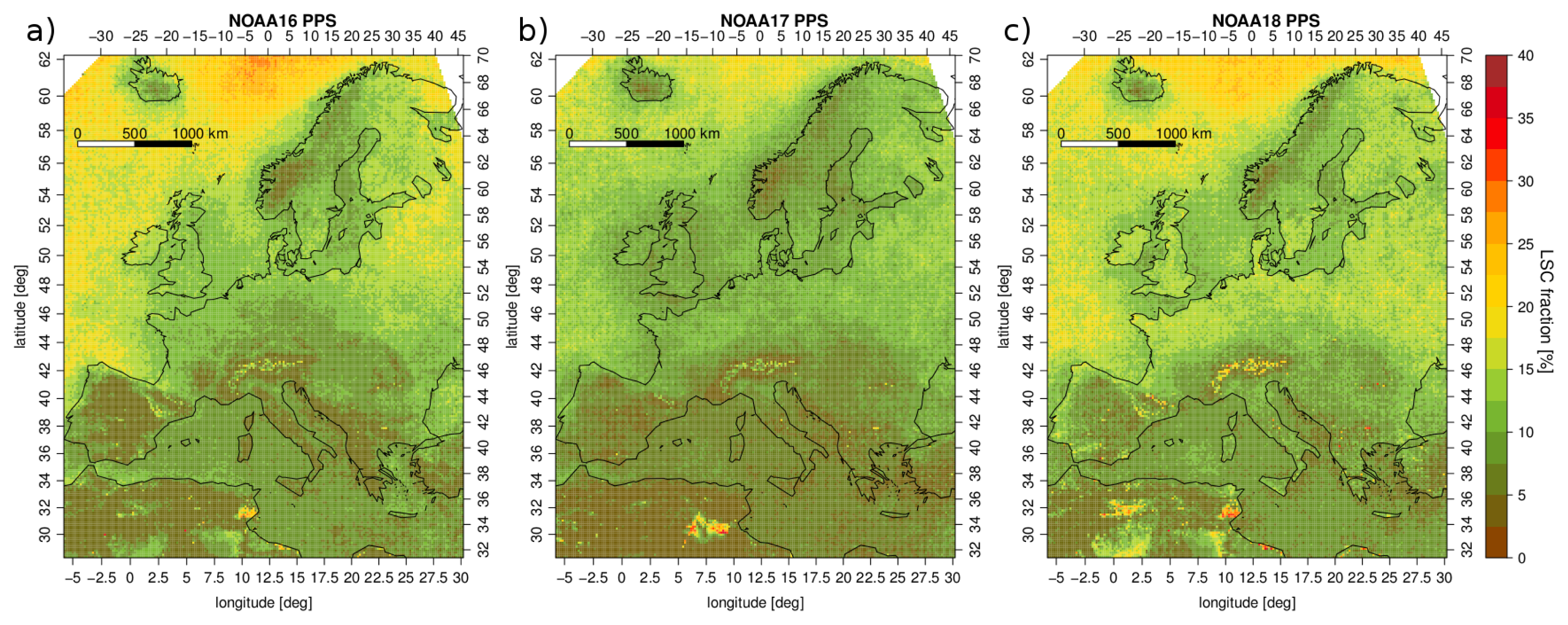
- NOAA16—with the channel 3b (3.7 μm) configuration and early morning overpass time (as for the year 2011), which has been changing due to the satellite orbital drift.
- NOAA17—with the channel 3a/3b (1.6/3.7 μm) configurations and morning overpass time.
- NOAA18—with the channel 3b (3.7 μm) configuration and midday overpass time.
4.2. Meteorological and Ancillary Data
- cloud types (at low, middle and high levels).
- present weather—coded values describing the current atmospheric conditions. Codes from 10–12 to 40–49 indicate different types of fog events.
5. Methodology of LSC Detection
5.1. Probabilistic Cloud Mask (PCM)
5.2. Algorithm Design
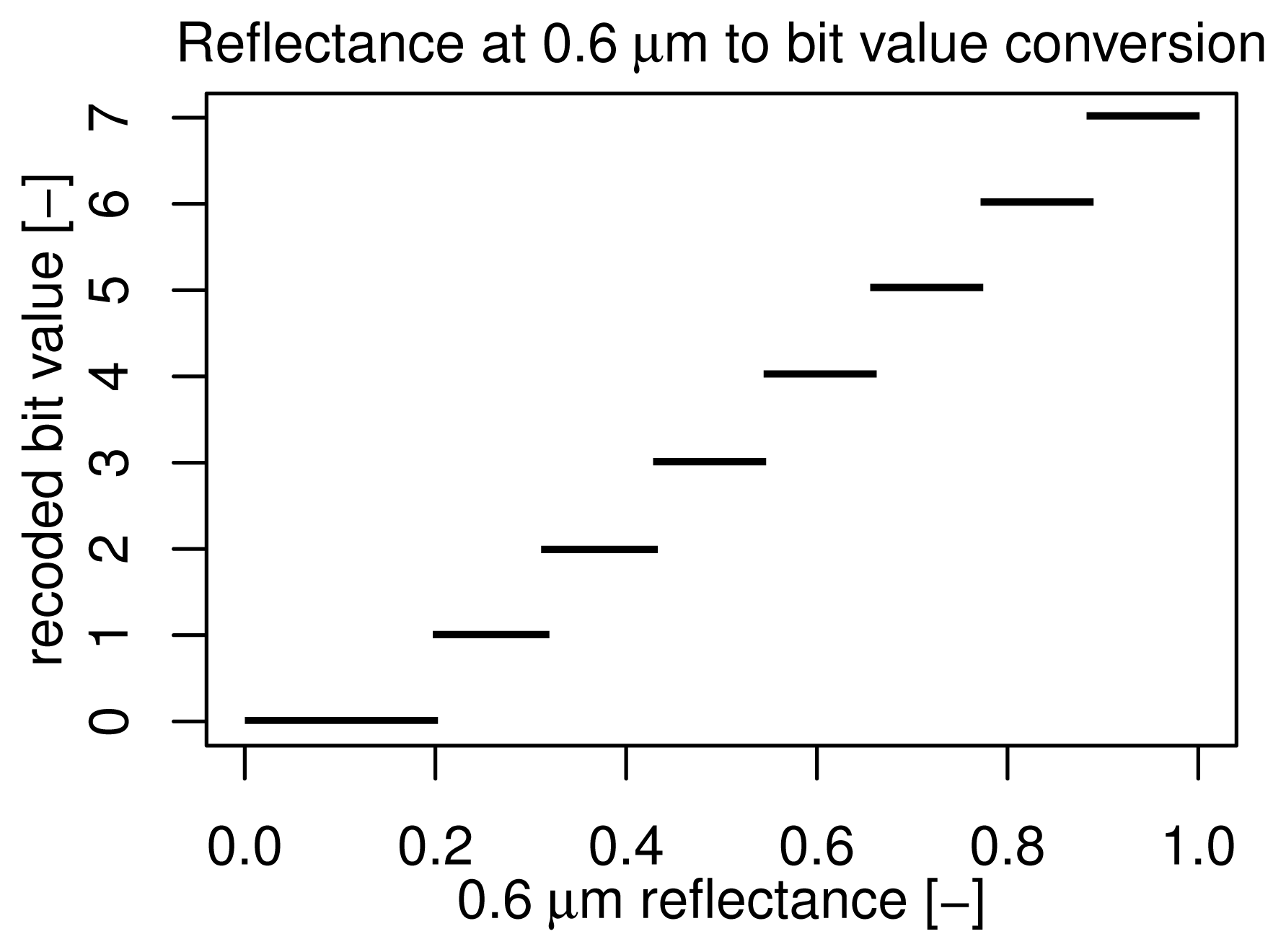
- 0.6 μm reflectance which contains information about the cloud optical depth.
- 1.6/3.7 μm reflectance which contains information about the cloud droplet radius.
- 10.8 μm BT which contains information about the thermodynamic state of a cloud.
- SKT-10.8 μm temperature difference which contains information about the cloud height.
- 10.8–12.0 μm BTD which indicates the presence of upper-level cloudiness.
- broken cloudiness flag (described in Section 5.3).
- SYNOP report indicates presence of the LSC.
- SYNOP report indicates absence of middle or high clouds (in case they could be visible through the inhomogeneous LSC cover).
- Thermal contrast between the 10.8 μm cloud top BT and the SKT does not exceed 18 K. This roughly corresponds to the cloud top height at 3 km assuming the temperature lapse rate of 0.6 K/100 m.
- 10.8 μm BT has to be greater than 232 K to exclude thick homogeneous cirrus clouds [53].
- 10.8–12.0 μm BTD has to be lower than 1 K to exclude high clouds.
- 0.6 μm reflectance has to be greater than 0.2 to exclude clouds with small optical thickness such as cirrus [54].
5.3. Preparation of Input Data
5.4. Algorithm Training Phase
5.5. Algorithm Validation and Derivation of LSC Data
6. Discussion of Acquired Results
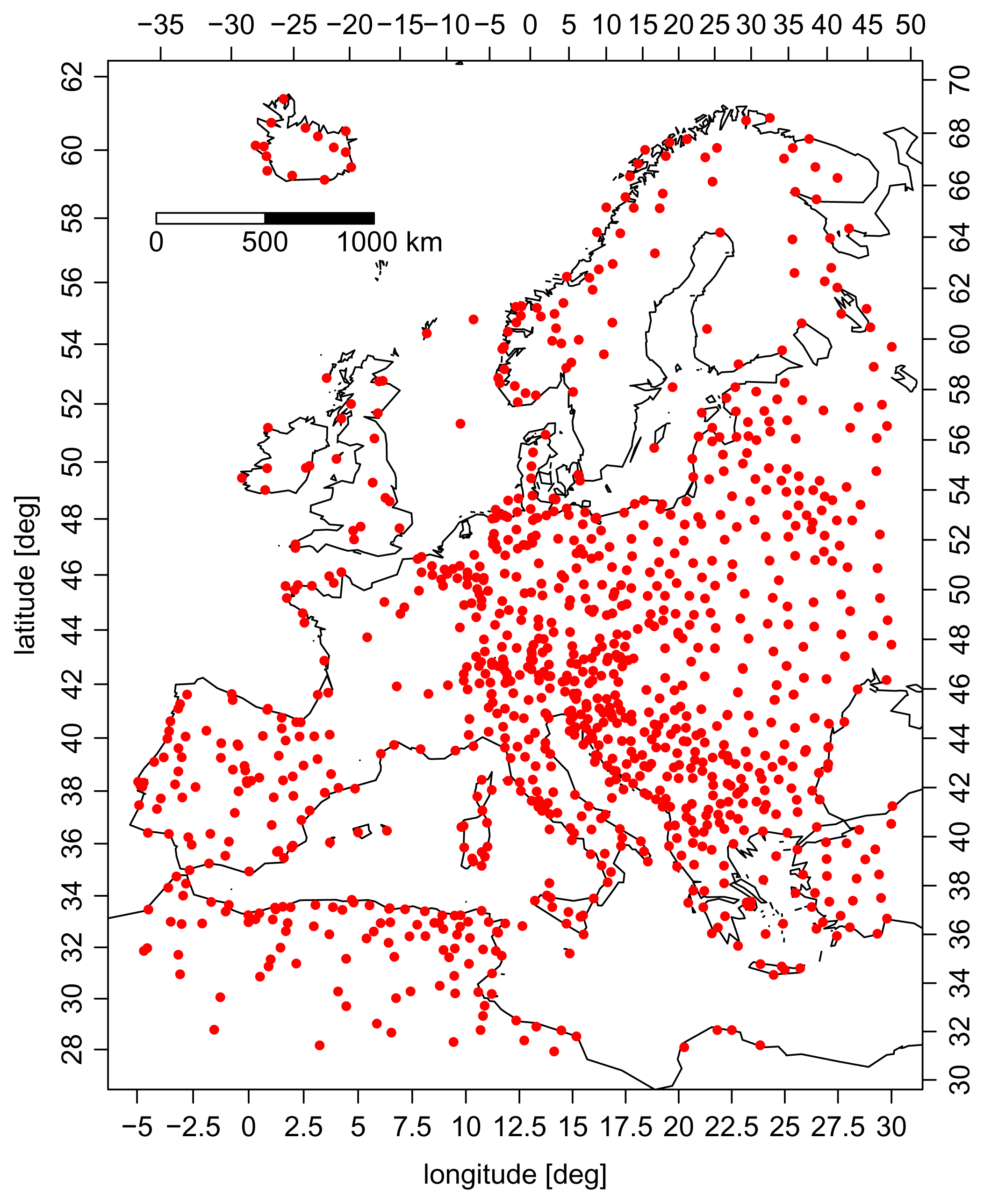
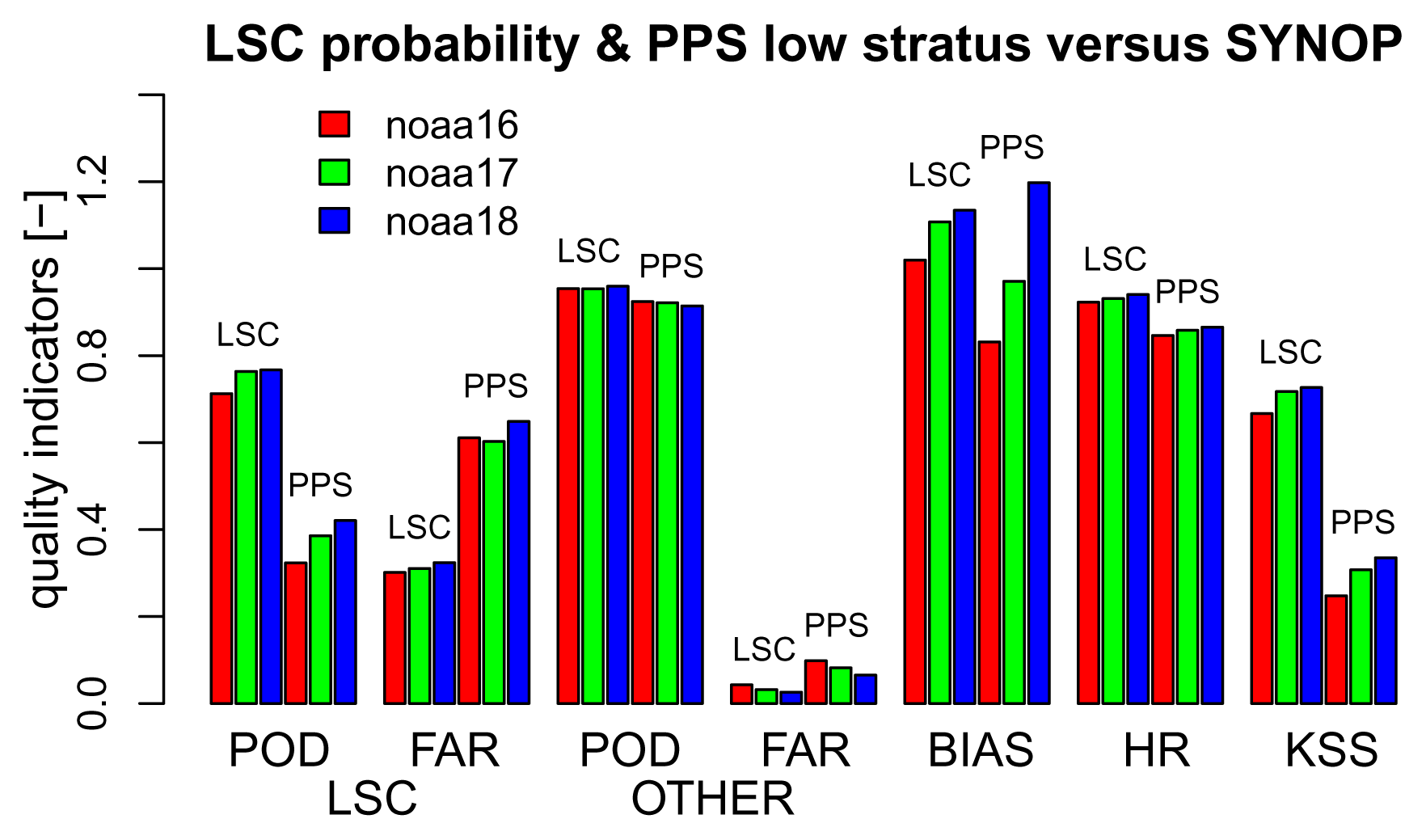
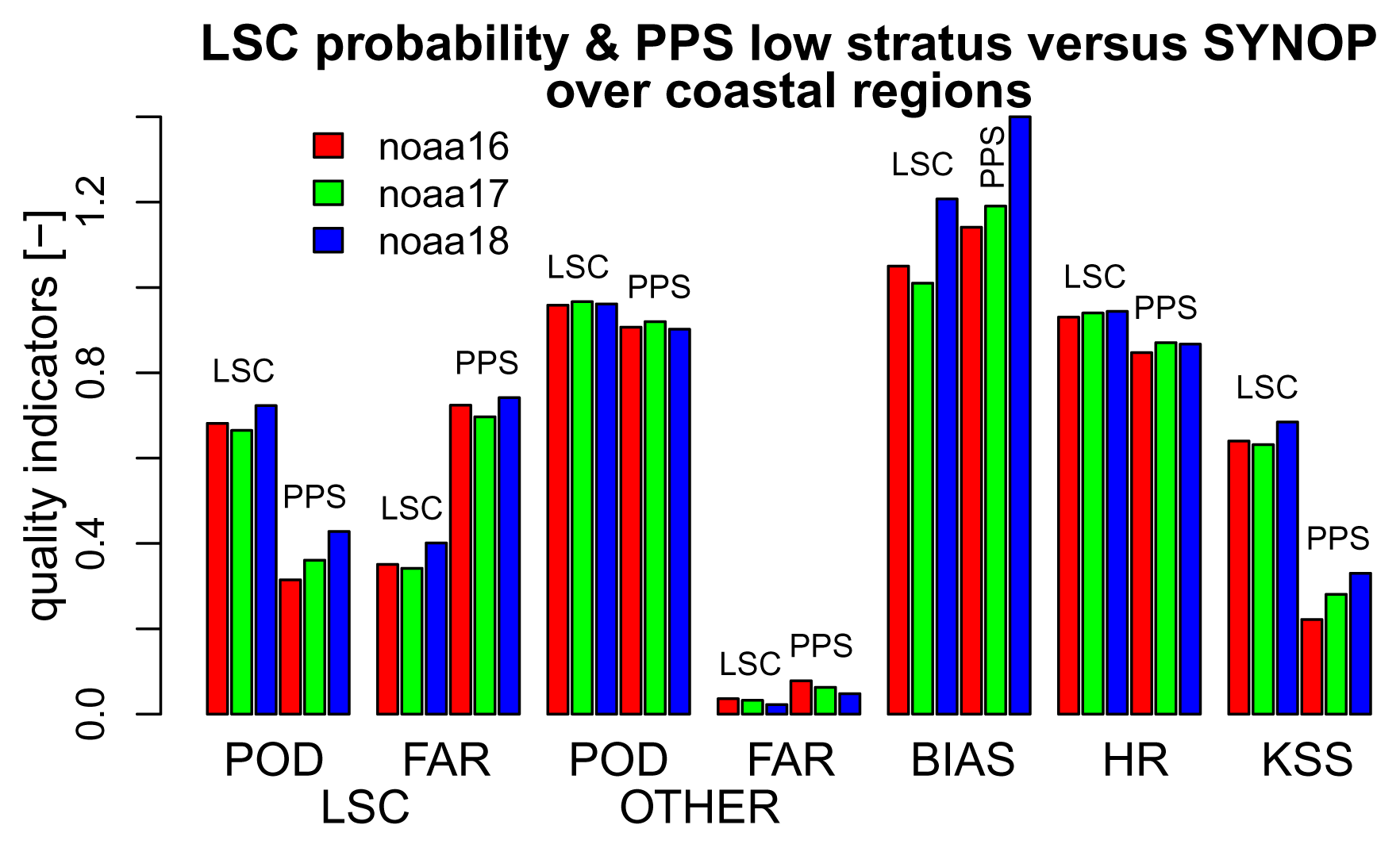
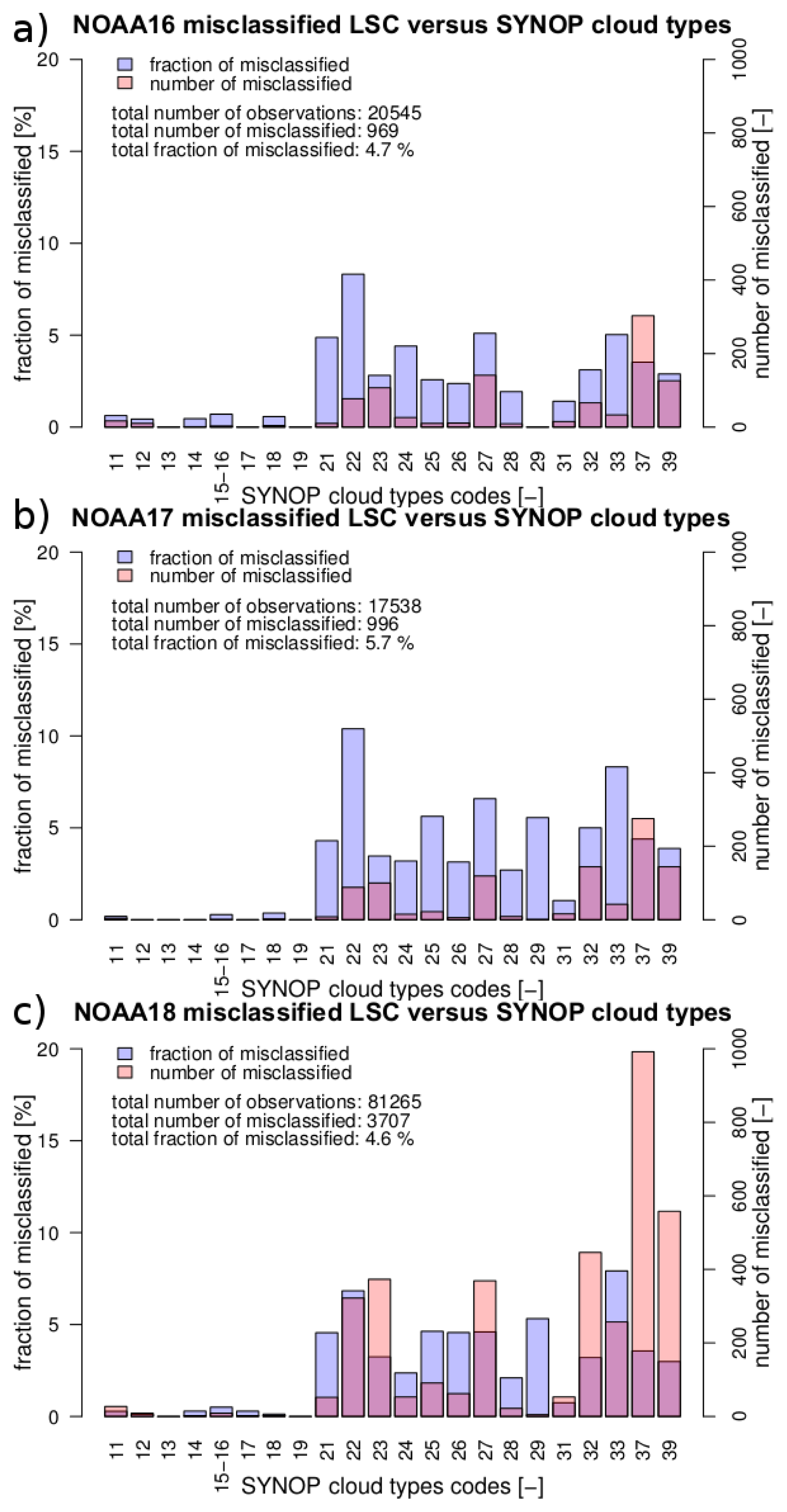
6.1. Validation against SYNOP Observations
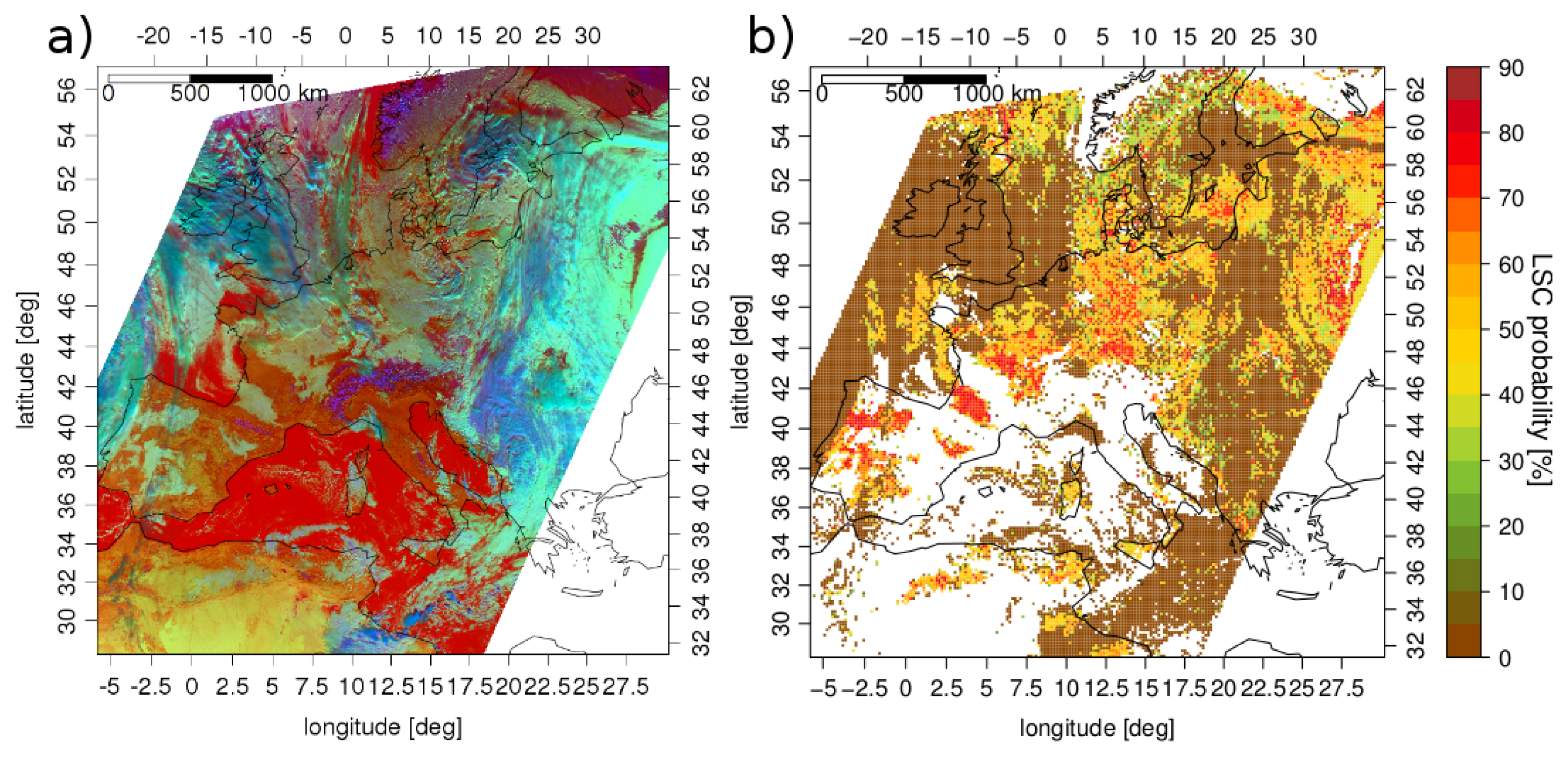
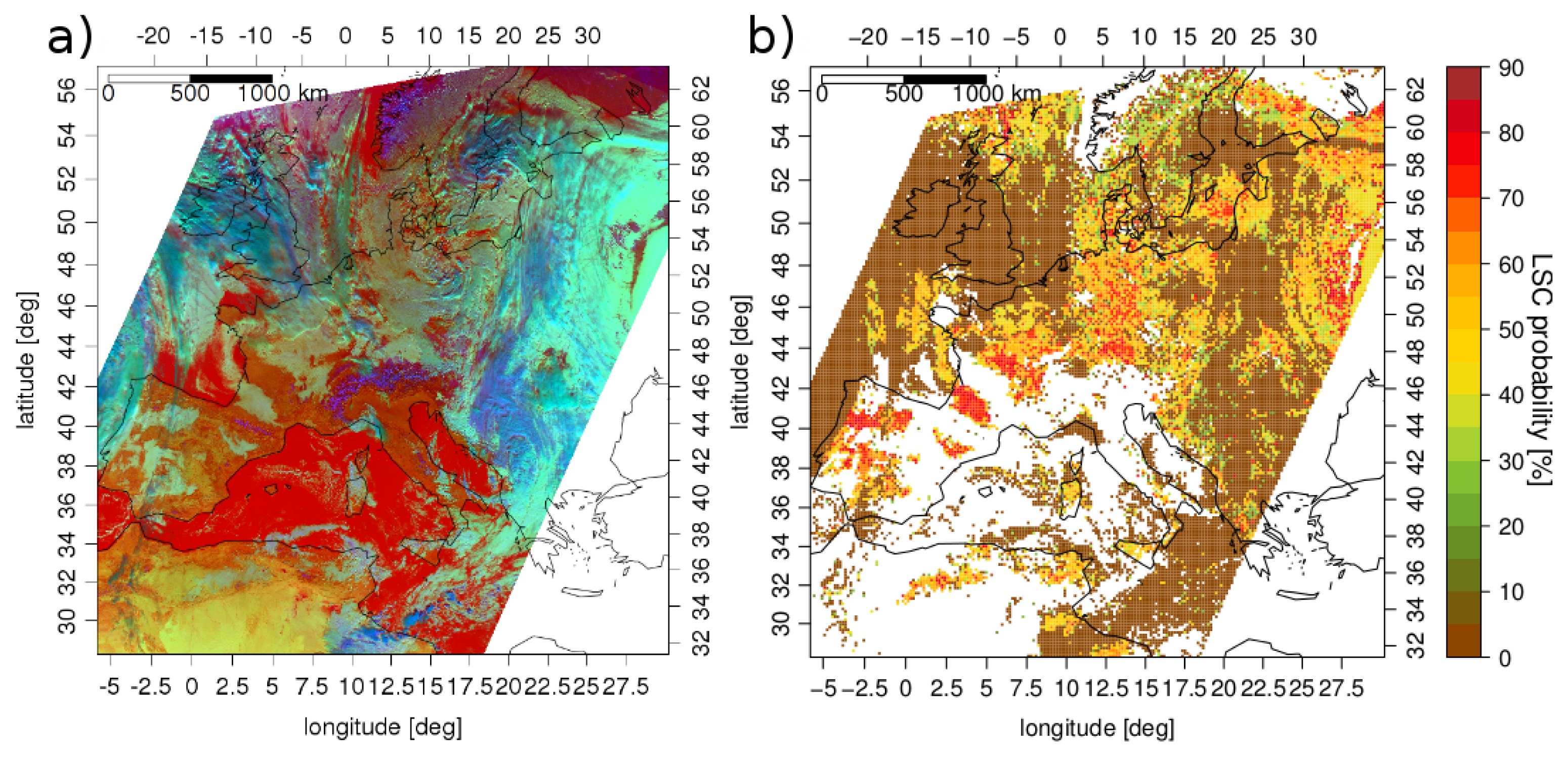
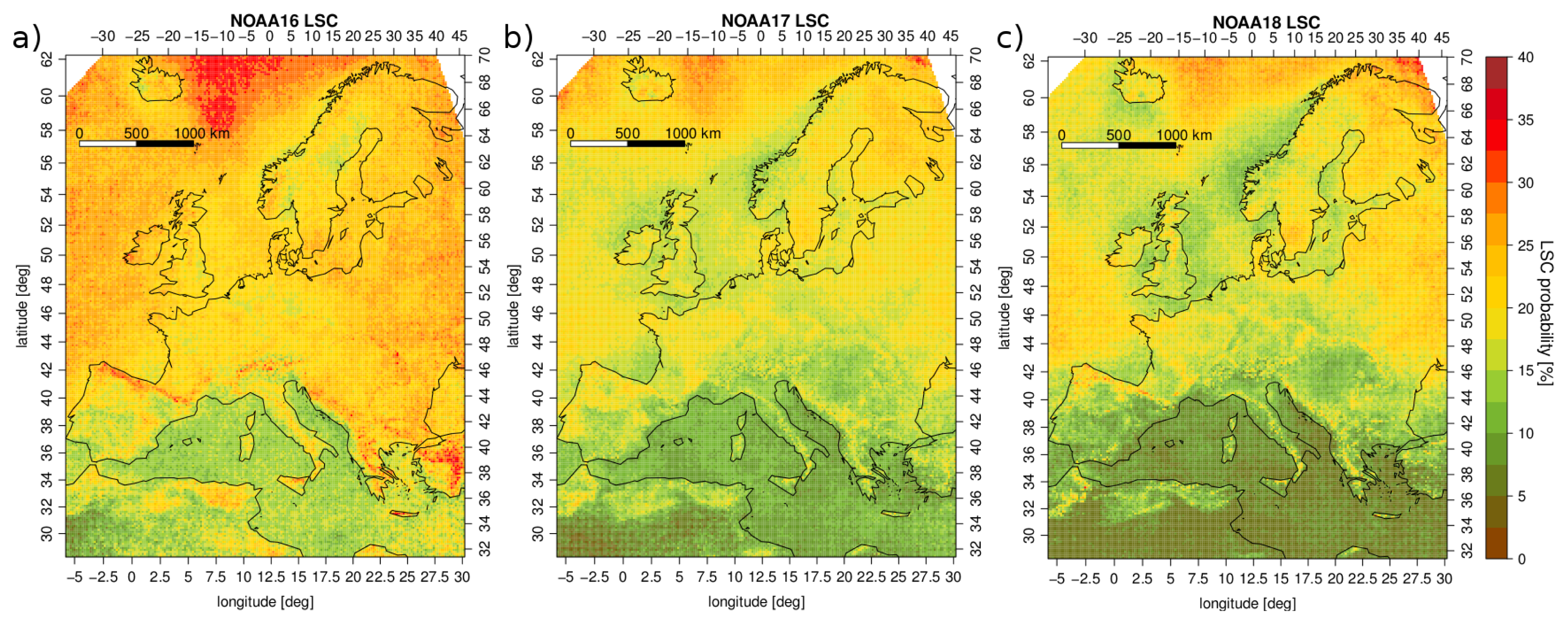
6.2. Spatial Distribution of LSC over Europe
6.3. Spatio-Temporal Distribution of LSC over Europe
7. Conclusions
- Within the SYNOP reports, LSC cannot be identified together with middle and/or high clouds.
- Thermal contrast between the 10.8 μm cloud top brightness temperature (BT) and skin surface temperature retrieved from a climate model cannot exceed 18 K.
- 10.8 μm BT has to be greater than 232 K.
- 10.8–12.0 μm BT difference has to be lower than 1 K.
- 0.6 μm reflectance has to be greater than 0.2.
Acknowledgments
Conflicts of Interest
- Author ContributionsPresented study was performed within the PhD dissertation of Jan Pawel Musial, who developed the proposed satellite LSC discrimination methodology. Fabia Hüsler and Christoph Neuhaus were responsible for preparation of AVHRR data, analysis of its integrity and quality assessment. Melanie Sütterlin and Stefan Wunderle were involved in structuring the research analyses, discussing its results, and correcting the manuscript.
References
- Jacobs, W.; Nietosvaara, V.; Bott, A.; Bendix, J.; Cermak, J.; Michaelides, S.; Gultepe, I. Microphysical data of fog observed in Clermont-Ferrand and corresponding satellite images. Short range forecasting methods of fog, visibility and low clouds. COST Action 2008, 722, 2–11. [Google Scholar]
- Guo, F.; Gu, W.; Yuan, F. Real-time risk assessment model of freeway traffic in rain and fog weather. Appl. Mech. Mater 2012, 226, 2370–2375. [Google Scholar]
- Cools, M.; Moons, E.; Wets, G. Assessing the impact of weather on traffic intensity. Wea. Clim. Soc 2010, 2, 60–68. [Google Scholar]
- Gultepe, I.; Pearson, G.; Milbrandt, J.; Hansen, B.; Platnick, S.; Taylor, P.; Gordon, M.; Oakley, J.; Cober, S. The fog remote sensing and modeling field project. Bull. Am. Meteorol. Soc 2009, 90, 341–359. [Google Scholar]
- Bendix, J. A satellite-based climatology of fog and low-level stratus in Germany and adjacent areas. Atmos. Res 2002, 64, 3–18. [Google Scholar]
- Błaś, M.; Polkowska, Ż.; Sobik, M.; Klimaszewska, K.; Nowiński, K.; Namieśnik, J. Fog water chemical composition in different geographic regions of Poland. Atmos. Res 2010, 95, 455–469. [Google Scholar]
- Gultepe, I.; Tardif, R.; Michaelides, S.; Cermak, J.; Bott, A.; Bendix, J.; Müller, M.; Pagowski, M.; Hansen, B.; Ellrod, G.; et al. Fog research: A review of past achievements and future perspectives. Pure Appl. Geophys 2007, 164, 1121–1159. [Google Scholar]
- Vautard, R.; Yiou, P.; van Oldenborgh, G.J. Decline of fog, mist and haze in Europe over the past 30 years. Nat. Geosci 2009, 2, 115–119. [Google Scholar]
- Cermak, J.; Bendix, J. Dynamical Nighttime Fog/Low Stratus Detection Based on Meteosat SEVIRI Data: A Feasibility Study. In Fog and Boundary Layer Clouds: Fog Visibility and Forecasting; Springer: Berlin, Germany, 2007; pp. 1179–1192. [Google Scholar]
- Cermak, J.; Bendix, J. A novel approach to fog/low stratus detection using Meteosat 8 data. Atmos. Res 2008, 87, 279–292. [Google Scholar]
- Schreiner, A.J.; Ackerman, S.A.; Baum, B.A.; Heidinger, A.K. A multispectral technique for detecting low-level cloudiness near sunrise. J. Atmos. Ocean. Technol 2007, 24, 1800–1810. [Google Scholar]
- Bendix, J.; Thies, B.; Cermak, J.; Nauß, T. Ground fog detection from space based on MODIS daytime data—A feasibility study. Wea. Forecast 2005, 20, 989–1005. [Google Scholar]
- WMO, International Cloud Atlas; World Meteorological Organization: Geneva, Switzerland, 1956; p. 62.
- Houze, R.A., Jr. Cloud Dynamics; Academic Press: Waltham, MA, USA, 1994; Volume 53. [Google Scholar]
- WMO, International Meteorological Vocabulary; Revised ed; World Meteorological Organization: Geneva, Switzerland, 1986; p. 276.
- NOAA, Surface Weather Observations and Reports; Office of The Federal Coordinator for Meteorological Services and Supporting Research: Washington, DC, USA, 2005.
- Welch, R.M.; Wielicki, B.A. The stratocumulus nature of fog. J. Appl. Meteorol 1986, 25, 101–111. [Google Scholar]
- Allaby, M. Encyclopedia of Weather and Climate, 2nd ed; Facts on File: New York, NY, USA, 2002. [Google Scholar]
- Klein, S.A.; Hartmann, D.L. The seasonal cycle of low stratiform clouds. J. Clim 1993, 6, 1587–1606. [Google Scholar]
- WMO, Manual on Codes; Secretariat of the World Meteorological Organization: Geneva, Switzerland, 1995.
- Cermak, J.; Eastman, R.M.; Bendix, J.; Warren, S.G. European climatology of fog and low stratus based on geostationary satellite observations. Q. J. R. Meteorol. Soc 2009, 135, 2125–2130. [Google Scholar]
- Bendix, J.; Thies, B.; Nauß, T.; Cermak, J. A feasibility study of daytime fog and low stratus detection with TERRA/AQUA-MODIS over land. Meteorol. Appl 2006, 13, 111–125. [Google Scholar]
- Gultepe, I.; Milbrandt, J. Microphysical observations and mesoscale model simulation of a warm fog case during FRAM project. Pure Appl. Geophys 2007, 164, 1161–1178. [Google Scholar]
- Dong, X.; Minnis, P.; Ackerman, T.P.; Clothiaux, E.E.; Mace, G.G.; Long, C.N.; Liljegren, J.C. A 25-month database of stratus cloud properties generated from ground-based measurements at the Atmospheric Radiation Measurement Southern Great Plains Site. J. Geophys. Res. Atmos 2000, 105, 4529–4537. [Google Scholar]
- Brenguier, J.L.; Pawlowska, H.; Schüller, L.; Preusker, R.; Fischer, J.; Fouquart, Y. Radiative properties of boundary layer clouds: Droplet effective radius versus number concentration. J. Atmos. Sci 2000, 57, 803–821. [Google Scholar]
- SMHI, Products Validation Report for the SAFNWC/PPS Version 2012; EUMETSAT: Norrköping, Finland, 2012.
- Allen, R.; Durkee, P.; Wash, C. Snow/cloud discrimination with multispectral satellite measurements. J. Appl. Meteorol 1990, 29, 994–1004. [Google Scholar]
- Key, J. The Cloud and Surface Parameter Retrieval (CASPR) System for Polar AVHRR: User’s Guide: Version 4.0; University of Wisconsin: Madison, WI, USA, 2002. [Google Scholar]
- Khlopenkov, K.; Trishchenko, A. SPARC: New cloud, snow, and cloud shadow detection scheme for historical 1-km AVHHR data over Canada. J. Atmos.Ocean. Technol 2007, 24, 322–343. [Google Scholar]
- Lee, T.F.; Turk, F.J.; Richardson, K. Stratus and fog products using GOES-8-9 3.9-_ m data. Wea. Forecast 1997, 12, 664–677. [Google Scholar]
- Ackerman, S.; Strabala, K.; Menzel, W.; Frey, R.; Moeller, C.; Gumley, L. Discriminating clear sky from clouds with MODIS. J. Geophys. Res 1998, 103, 32–141. [Google Scholar]
- Yum, S.S.; Hudson, J.G. Maritime/continental microphysical contrasts in stratus. Tellus 2002, 54, 61–73. [Google Scholar]
- Eyre, J.; Brownscombe, J.; Allam, R. Detection of fog at night using Advanced Very High Resolution Radiometer (AVHRR) imagery. Meteorol. Mag 1984, 113, 266–271. [Google Scholar]
- Turner, J.; Allam, R.; Maine, D. A case study of the detection of fog at night using channels 3 and 4 on the Advanced Very High Resolution Radiometer (AVHRR). Meteor. Mag 1986, 115, 285–290. [Google Scholar]
- Dybbroe, A. Automatic Detection of Fog at Night Using AVHRR Data. Proceedings of the 6th AVHRR Data Users’ Meeting, Belgirate, Italy, 29 June–2 July 1993; pp. 254–252.
- Chaurasia, S.; Sathiyamoorthy, V.; Paul Shukla, B.; Simon, B.; Joshi, P.; Pal, P. Night time fog detection using MODIS data over Northern India. Meteorol. Appl 2011, 18, 483–494. [Google Scholar]
- Ellrod, G.P. Advances in the detection and analysis of fog at night using GOES multispectral infrared imagery. Wea. Forecast 1995, 10, 606–619. [Google Scholar]
- Roebeling, R.; Feijt, A.; Stammes, P. Cloud property retrievals for climate monitoring: Implications of differences between Spinning Enhanced Visible and Infrared Imager (SEVIRI) on METEOSAT-8 and Advanced Very High Resolution Radiometer (AVHRR) on NOAA-17. J. Geophys. Res.: Atmos 2006, 111, 20210–20226. [Google Scholar]
- Anthis, A.; Cracknell, A. Use of satellite images for fog detection (AVHRR) and forecast of fog dissipation (METEOSAT) over lowland Thessalia, Hellas. Int. J. Remote Sens 1999, 20, 1107–1124. [Google Scholar]
- Wright, B.; Thomas, N. An objective visibility analysis and very-short-range forecasting system. Meteorol. Appl 1998, 5, 157–181. [Google Scholar]
- Herzegh, P.; Wiener, G.; Bankert, R.; Benjamin, S.; Bateman, S.; Cowie, J.; Hadjimichael, M.; Tryhane, M.; Weekley, B. Development of FAA National Ceiling and Visibility Products: Challenges, Strategies and Progress. Proceedings of the 12th Conference on Aviation Range and Aerospace Meteorology, Atlanta, GA, USA, 28 January–2 February 2006.
- Guidard, V.; Tzanos, D. Analysis of fog probability from a combination of satellite and ground observation data. Pure Appl. Geophys 2007, 164, 1207–1220. [Google Scholar]
- Wind, G.; Platnick, S.; King, M.D.; Hubanks, P.A.; Pavolonis, M.J.; Heidinger, A.K.; Yang, P.; Baum, B.A. Multilayer cloud detection with the MODIS near-infrared water vapor absorption band. J. Appl. Meteorol. Climatol 2010, 49, 2315–2333. [Google Scholar]
- Yoo, J.M.; Jeong, M.J.; Hur, Y.M.; Shin, D.B. Improved fog detection from satellite in the presence of clouds. Asia-Pac. J. Atmos. Sci 2010, 46, 29–40. [Google Scholar]
- Dybbroe, A.; Karlsson, K.; Thoss, A. NWCSAF AVHRR cloud detection and analysis using dynamic thresholds and radiative transfer modeling. Part I: Algorithm description. J. Appl. Meteorol 2005, 44, 39–54. [Google Scholar]
- Hüsler, F.; Fontana, F.; Neuhaus, C.; Riffler, M.; Musial, J.; Wunderle, S. AVHRR archive and processing facility at the University of Bern: A comprehensive 1-km satellite data set for climate change studies. EARSeL eProc 2011, 10, 83–101. [Google Scholar]
- Brunel, P.; Marsouin, A. Operational AVHRR navigation results. Int. J. Remote Sens 2000, 21, 951–972. [Google Scholar]
- Musial, J.; Hüsler, F.; Sütterlin, M.; Neuhaus, C.; Wunderle, S. Probabilistic approach to cloud and snow detection on Advanced Very High Resolution Radiometer (AVHRR) imagery. Atmos. Meas. Tech 2014, 7, 799–822. [Google Scholar]
- Musial, J.; Hüsler, F.; Sütterlin, M.; Neuhaus, C.; Wunderle, S. Probabilistic approach to cloud and snow detection on AVHRR imagery. Atmos. Meas. Tech. Discuss 2013, 6, 8445–8507. [Google Scholar]
- Arya, S.; Mount, D.; Netanyahu, N.; Silverman, R.; Wu, A. An optimal algorithm for approximate nearest neighbor searching fixed dimensions. J. ACM 1998, 45, 891–923. [Google Scholar]
- Tyler, D.E.; Critchley, F.; Dümbgen, L.; Oja, H. Invariant co-ordinate selection. J. R. Stat. Soc.: Ser. B (Stat. Methodol.) 2009, 71, 549–592. [Google Scholar]
- Hall, D.; Riggs, G.; Salomonson, V.; DiGirolamo, N.; Bayr, K. MODIS snow-cover products. Remote Sens. Environ 2002, 83, 181–194. [Google Scholar]
- Ou, S.; Liou, K.; Baum, B. Detection of multilayer cirrus cloud systems using AVHRR data: Verification based on FIRE-II-IF0 composite measurements. J. Appl. Meteorol 1996, 35, 178–191. [Google Scholar]
- Minnis, P.; Alvarez, J.; Young, D.; Sassen, K.; Grund, C. The 27-28 October 1986 FIRE IFO cirrus case study—Cirrus parameter relationships derived from satellite and lidar data. Mon. Wea. Rev 1990, 118, 2402–2425. [Google Scholar]
- Miller, A. Subset Selection in Regression; CRC Press: Boca Raton, FL, USA, 2002. [Google Scholar]
- Weare, B.C. Near-global observations of low clouds. J. Clim 2000, 13, 1255–1268. [Google Scholar]
- Hahn, C.J.; Warren, S.G.; London, J. Edited Synoptic Cloud Reports from Ships and Land Stations Over the Globe, 1982–1991; Technical report; Carbon Dioxide Information Analysis Center, Oak Ridge National Laboratory: Oak Ridge, TN, USA, 1996. [Google Scholar]
- Wu, D.; Hu, Y.; McCormick, M.P.; Yan, F. Global cloud-layer distribution statistics from 1 year CALIPSO lidar observations. Int. J. Remote Sens 2011, 32, 1269–1288. [Google Scholar]
- Bankert, R.L. Cloud classification of AVHRR imagery in maritime regions using a probabilistic neural network. J. Appl. Meteorol 1994, 33, 909–918. [Google Scholar]
- Sassen, K.; Wang, Z. Classifying clouds around the globe with the CloudSat radar: 1-year of results. Geophys. Res. Lett 2008, 35, L04805. [Google Scholar]
- Scherrer, S.C.; Appenzeller, C. Fog and low stratus over the Swiss Plateau—A climatological study. Int. J. Climatol 2013, 34, 678–686. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Code | Description |
|---|---|
| 11 | cirrus fibratus or cirrus uncinus |
| 12 | cirrus spissatus, in patches or entangled sheaves |
| 13 | cirrus spissatus cumulonimbogenitus |
| 14 | cirrus uncinus or fibratus,or both, progressively invading the sky |
| 15–16 | cirrus (often in bands) and cirrostratus, or cirrostratus alone with the continuous veil |
| 17 | cirrostratus covering the whole sky |
| 18 | cirrostratus not progressively invading the sky and not entirely covering it |
| 19 | cirrocumulus alone, or cirrocumulus predominant among others high clouds |
| 21 | altostratus translucidus |
| 22 | altostratus opacus or nimbostratus |
| 23 | altocumulus translucidus at a single level |
| 24 | patches (often lenticularis) of altocumulus translucidus |
| 25 | altocumulus translucidus in bands, or layers of altocumulus translucidus or opacus |
| 26 | altocumulus cumulogenitus (or cumulonimbogenitus) |
| 27 | altocumulus translucidus or opacus, or altocumulus opacus in a single layer |
| 28 | altocumulus castellanus or flocus |
| 29 | altocumulus of chaotic sky, generally at several levels |
| 31 | cumulus humilis or cumulus fractus other than of bad weather, or both |
| 32 | cumulus mediocris or congestus |
| 33 | cumulonimbus calvus, with or without cumulus, stratocumulus or stratus |
| 34 | stratocumulus cumulogenitus |
| 35 | stratocumulus other than stratocumulus cumulogenitus |
| 36 | stratus nebulosus or stratus fractus other than of bad weather, or both |
| 37 | stratus fractus or cumulus fractus of bad weather usually below altostratus or nimbostratus |
| 38 | cumulus and stratocumulus other than stratocumulus cumulogenitus |
| 39 | cumulonimbus capillatus (often with an anvil) |
| Code | Description |
|---|---|
| 10 | mist |
| 11 | patches of shallow fog or ice fog at station |
| 12 | more or less continuous shallow fog or ice fog at station |
| 40 | fog or ice fog at a distance at the time of observation but not at station |
| 41 | fog or ice fog in patches |
| 42 | fog or ice fog, sky visible, has become thinner during the preceding hour |
| 43 | fog or ice fog, sky invisible, has become thinner during the preceding hour |
| 44 | fog or ice fog, sky visible, no appreciable change during the preceding hour |
| 45 | fog or ice fog, sky invisible, no appreciable change during the preceding hour |
| 46 | fog or ice fog, sky visible, has become thicker during the preceding hour |
| 47 | fog or ice fog, sky invisible, has become thicker during the preceding hour |
| 48 | fog depositing rime sky visible |
| 49 | fog depositing rime sky invisible |
© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Musial, J.P.; Hüsler, F.; Sütterlin, M.; Neuhaus, C.; Wunderle, S. Daytime Low Stratiform Cloud Detection on AVHRR Imagery. Remote Sens. 2014, 6, 5124-5150. https://doi.org/10.3390/rs6065124
Musial JP, Hüsler F, Sütterlin M, Neuhaus C, Wunderle S. Daytime Low Stratiform Cloud Detection on AVHRR Imagery. Remote Sensing. 2014; 6(6):5124-5150. https://doi.org/10.3390/rs6065124
Chicago/Turabian StyleMusial, Jan Pawel, Fabia Hüsler, Melanie Sütterlin, Christoph Neuhaus, and Stefan Wunderle. 2014. "Daytime Low Stratiform Cloud Detection on AVHRR Imagery" Remote Sensing 6, no. 6: 5124-5150. https://doi.org/10.3390/rs6065124
APA StyleMusial, J. P., Hüsler, F., Sütterlin, M., Neuhaus, C., & Wunderle, S. (2014). Daytime Low Stratiform Cloud Detection on AVHRR Imagery. Remote Sensing, 6(6), 5124-5150. https://doi.org/10.3390/rs6065124