1. Introduction
Near-surface archaeological residues that present themselves as features in the vegetated landscape are usually the result of anthropogenic interference with the natural soil matrix [
1]. This interference causes differences in the composition and structure of the soil and these, in turn, influence the development and health of any vegetation present on the surface. Such changes can be manifested in vegetation canopy properties (generically known as crop marks) and used as a proxy for changes in the soil caused by past human activity [
2,
3]. However, the formation of archaeological vegetation marks is a complex process that is related to many factors, such as the physical (including thermal), chemical and biological properties of the soil; environmental dynamics during the crop lifecycle; soil-moisture balance; growth characteristics and requirements of the vegetation and land-management processes [
4]. Moreover, these processes operate at different scales and interact in complex ways to influence the development and health of overlying vegetation, presenting in terms of structure and density (such as Leaf Area Index (LAI) and canopy biomass), or as variations in stress and vigour expressed as changes in pigmentation (such as variations in senescence) under the right conditions [
5,
6,
7].
These principles are widely used to detect archaeological landscapes using visible wavelength photography from airborne platforms [
8]. However, this is over-reliant on the visual component of the electromagnetic spectrum [
9,
10]. Furthermore, there are types of soil (e.g., clay or other heavy soils), crops, and environmental conditions that make it difficult to detect archaeological features proxied as crop marks in this way. In areas where this difficulty is persistent, this means a bias in detection, which becomes a bias in coverage. This fragments the knowledge base, leading to less than optimal management and policy decisions [
11,
12]. Therefore, an alternative approach to archeological prospection via vegetation marks in such “difficult” areas is imperative [
13]. Other remote sensing devices and modes of operation have the potential to improve detection of archaeological residues, as their ability to detect subtly expressed contrasts could afford the opportunity to both extend the temporal window for detection and detect subtly expressed features that cannot be detected using conventional photography [
3]. There has been some success in using alternative sensors [
14,
15] and much recent attention has been placed on the use of airborne LiDAR (also known as Airborne Laser Scanning, based on the principles of Light Detection and Ranging).
Airborne LiDAR is now widely used in archaeology [
16,
17]) and, in particular, to detect features defined by slight changes in land surface topography, as these sensors enable these topographic changes to be detected regardless of the vegetation cover on that surface via the production of digital terrain models (DTM) [
18,
19,
20,
21]. Airborne LiDAR has not been employed for vegetation mark identification via a digital surface model (DSM). This is probably because, although in theory a single airborne LiDAR survey can provide both the DSM and the DTM by using the first and last returns respectively, often the vegetation is either of limited height or exhibits a limited dynamic range (the difference between the maximum and minimum values) [
22]. Thus, the production of a vegetation canopy height model to identify changes in its properties related to changes in the soil as a result of archeological residue is extremely challenging. Consequently, archeological prospection via the vegetation canopy has primarily focused on using intensity, rather than the range measurements of airborne LiDAR.
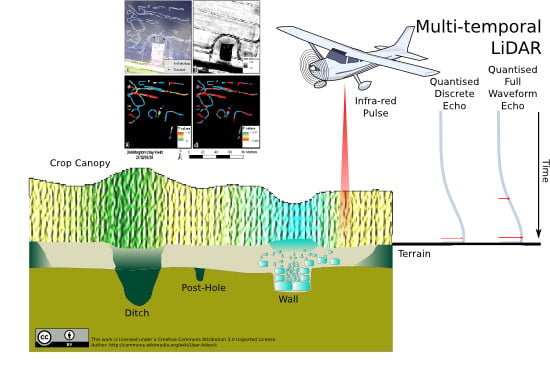
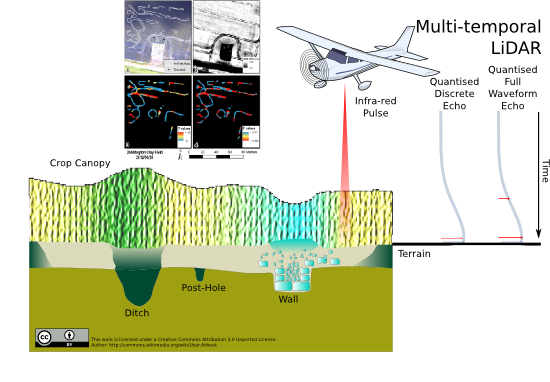
A LiDAR instrument is an active sensor emitting a pulse, generally at a single narrow wavelength in the near-infrared. The backscattered pulse contains an intensity component that can be crudely considered as a single narrow bandwidth imaging spectrometer. As such, Challis
et al. [
23,
24] used the intensity values to detect both archaeological and geological crop marks and Briese
et al. [
25,
26] demonstrated a significant improvement in detection using the intensity data centered at 550 nm from an airborne LiDAR instrument array employing multiple wavelengths. Briese
et al. also employed the full waveform (FWF) recorded by an airborne LiDAR with some success. It is well established that, via advanced processing methods (e.g.
, signal decomposition or modelling [
27]), FWF data offers increased pulse detection reliability, accuracy, and resolution and, therefore, improves the accuracy of topographic models that could be used for archaeological detection [
28,
29,
30]. Furthermore, these data have been shown to provide additional information about the structure and physical backscattering properties of the objects they interact with [
31]. In particular, significant information on the roughness, slope and reflectivity of surface materials may be retrieved from full waveform data (using both the range and intensity data). For example, differences in the properties of isolated echoes (e.g., width, amplitude or cross-section) and their number (e.g., echo ratio) have been found for vegetation and ploughed fields
versus roads, or meadow areas and between grass and bare earth, or between different roof materials [
32,
33]. Common application of these data have been in forest studies, both at the level of the stand and the individual tree, for the estimation and modelling of forest properties [
34] and tree species mapping [
35]. It is commonly assumed that for studies other than that of forests, FWF LiDAR cannot be expected to enhance the information content already provided by the discrete return data [
36]. However, Doneus
et al. [
28] have used FWF for the detection of archaeological features in a forest understory and produced improved detection confidence over discrete returns.
In this paper, it is hypothesised that, via a fuller use of airborne LiDAR data, archaeological features could be detected using the vegetation canopy itself as a proxy (i.e., as vegetation marks) for archaeology. Two approaches are investigated: (i) the production of a canopy height model (CHM) produced via multiple-date discrete LiDAR data and (ii) the use of canopy biomass metrics extracted from the full waveform of a single-date dataset. A CHM is quite simply a DSM minus the corresponding DTM (or bare earth model); in this paper, we suggest that taking the DSM and DTM from different airborne LiDAR surveys (i.e., exploiting the multi-temporal domains of remote sensing) overcomes the issues associated with dynamic range, and we demonstrate that the CHM can show contrast relating to soil changes caused by archeological remains. In addition, we suggest that the extra information provided by the full waveform may also exhibit patterns relating to changes in vegetation canopy properties that are caused by the occurrence of archaeological residues in the soil. The two approaches under investigation in this paper have the potential to extend the utility of airborne LiDAR surveys for archaeological prospection in general. But, in particular, our overriding objective is to determine how airborne LiDAR might improve archaeological prospection in “difficult” conditions (i.e., clay soil); improved detection over “difficult” areas is a research priority and, if successful, should afford improved detection of archaeological features in the UK and beyond.
3. Methods
3.1. Data Processing
The airborne LiDAR data were supplied in the LAS format and converted to ASCII format using the LAStools software package. For the discrete data, captured on the three dates (
Table 1), the entire point cloud was interpolated to a 0.4 m grid using the inverse distance weighted interpolation functions of the GDAL software library. Subsequently, the first discrete return data were used to produce a digital surface model (DSM) via the nearest neighbor value per grid cell for each date of acquisition and each study site. The spatial accuracy of the resultant geo-referenced DSMs was evaluated using the ortho-photography provided by the Geomatics Group Ltd and all had sub-pixel accuracy. The height values from the interpolated DSMs produced were compared over areas of hard standing at each site, and found to be consistent within 0.04 m. The full waveform data were interpolated using the same method. However, it was not possible to mitigate for the effects of scan-angle on the data, as the intensity values returned by the sensor are affected by the automatic gain control applied to the returning signal by the sensor. To reduce the impact of this, subsets of the FW data were derived from single flightlines, as near as possible to the centre of the flightline. The full waveform ALS data captured over the fields at both Diddington and Harnhill in March and June 2012 were extracted and analysed using bespoke Python software [
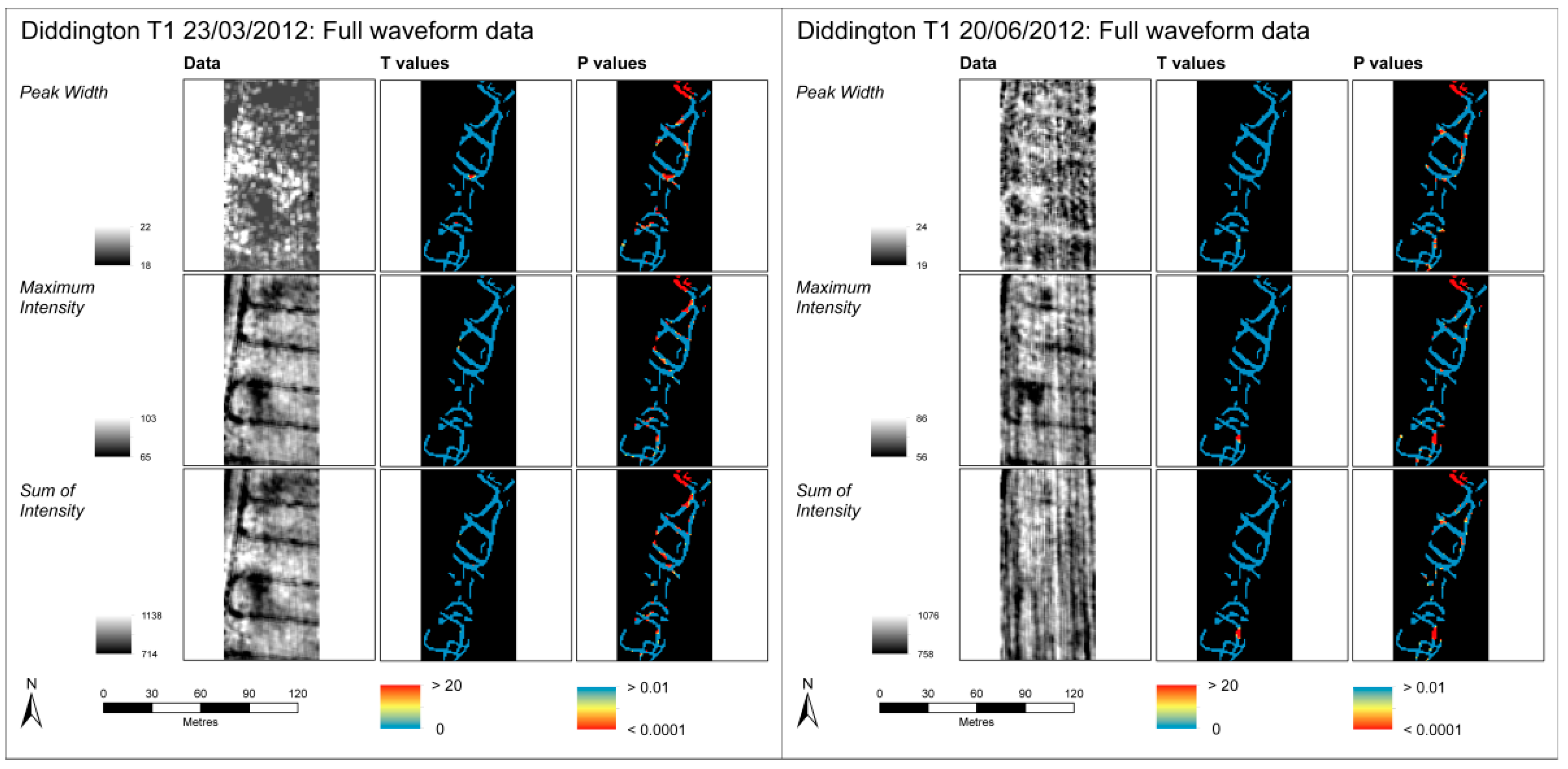
41]. All waveforms were smoothed using a univariate spline to remove noise. The locations of peaks in the waveform were identified using the change in the first derivative. These locations were used to segment the waveform. In all cases, only one peak was identified for each waveform. From this the three metrics of the (i) sum of intensity within the peak; (ii) maximum intensity of the peak, and (iii) overall width of the peak, were extracted.
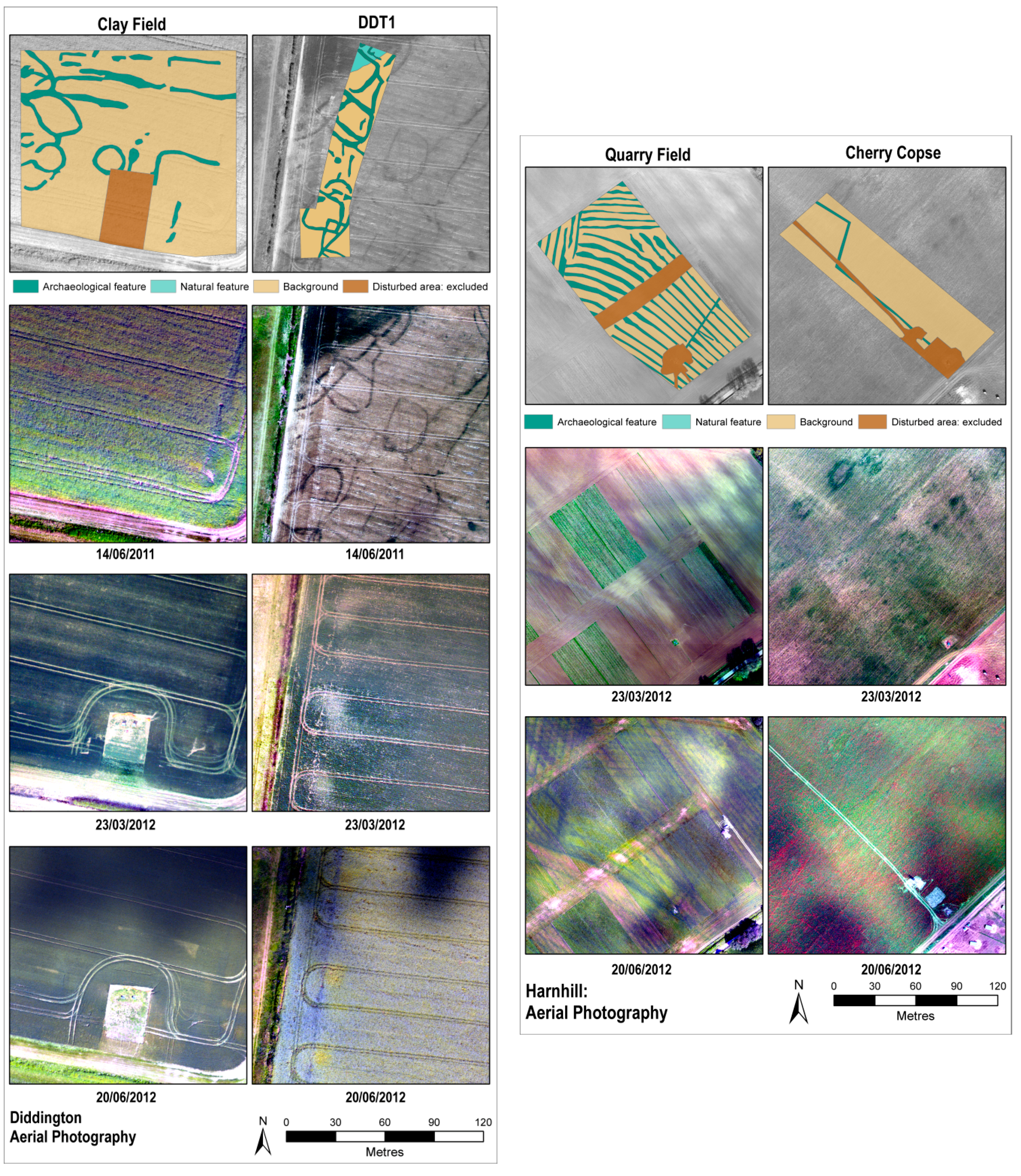
Any magnetic anomalies present in the magnetometer survey data were interpreted as likely to be caused by archaeological and geological features and digitized as polygons. These polygons were then converted to rasters using the GDAL software library and used to classify each pixel in the raster models derived from the LiDAR data. The aerial photography captured by the NERC ARSF were used to create an ortho-photographic mosaic of the study area using the AgiSoft PhotoScan Structure from Motion (SFM) package, using the EXIF data collected with the images to estimate camera position and exterior orientation parameters. The resultant 16-bit RGB ortho-photographic mosaics are of 0.1 m spatial resolution, and georeferenced to +/− 0.2 m accuracy. The spatial resolution of the images is so high, it is difficult to identify variations on a canopy scale. In order to facilitate this, Gaussian smoothing filtering was applied to generalize the crop canopy and improve the acuity of the features. Both these aerial photographs and the Geomatics Group’s ortho-photography were further processed; to compare with the LiDAR data, the Normalized Difference Green Red Index (NDGRI = (G − B)/(G + B), where G and R are the green and red bands respectively) was computed in order to maximise any contrast observed.
3.2. Data Analyses
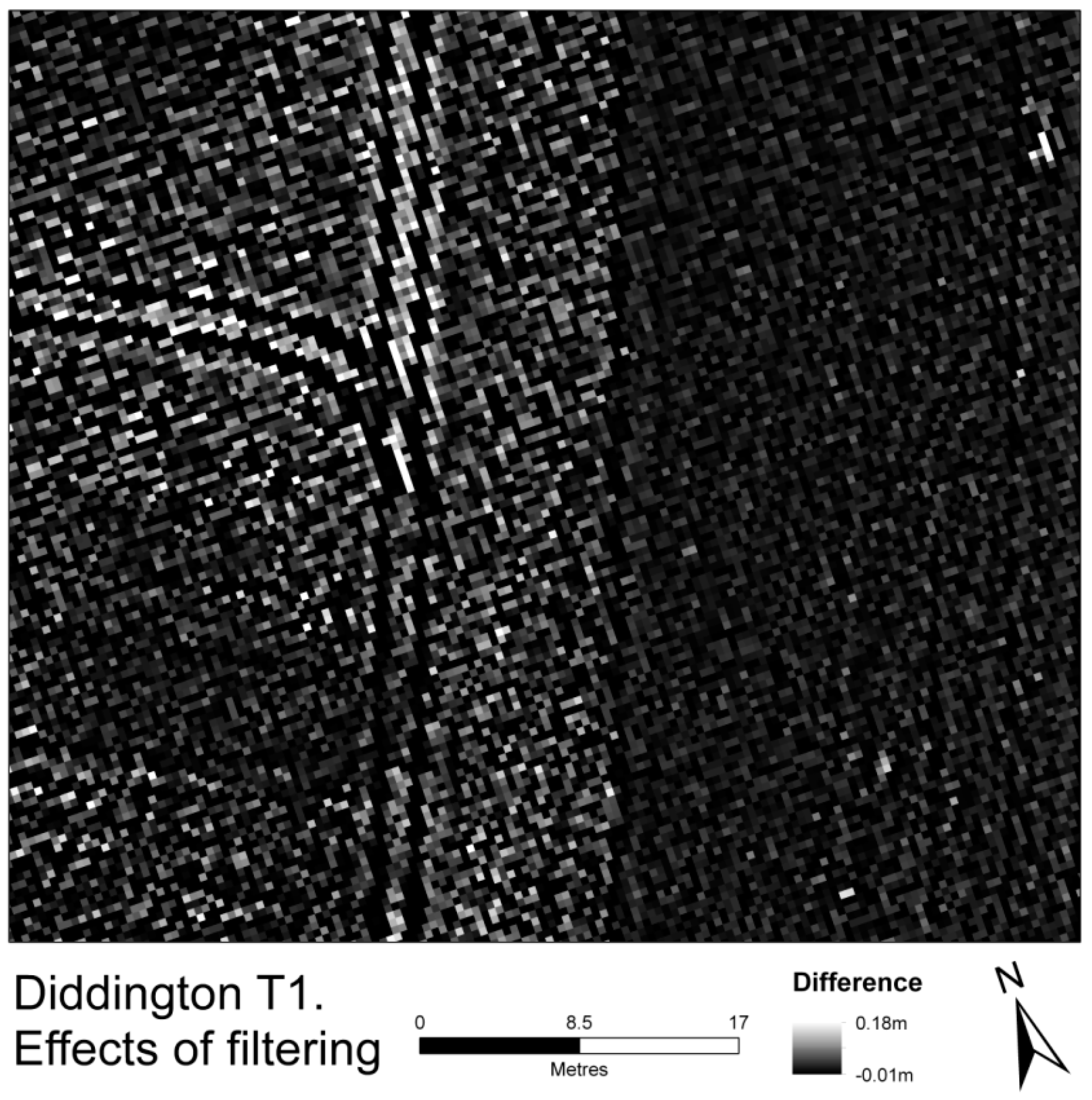
Each site was surveyed on different dates with the vegetation in a different state each time. By processing this data appropriately, a DTM could be created that represented a “bare earth surface”, and a DSM could be created that represented a “mature vegetation surface” which could afford the calculation of a canopy height model (CHM). Since the LiDAR data acquired during March 2012 occurred when there was bare soil or very immature vegetation this was used as the DTM for each of the four fields under investigation. This “bare earth” DTM model was pre-processed using a uniform low-pass filter with an 11 × 11 kernel size. This was chosen to smooth out variations in the cultivated surface by tillage, and the texture of the immature crop (particularly brassicas), which can produce spurious anomalies in the resultant model. The DEMs generated from the surveys undertaken when the crop was mature (i.e., June 2011 and June 2012) were used as a DSM in the generation of the CHM. Each of these DSMs was pre-processed using a median filter with a 3 × 3 kernel size to remove noise and small scale variations in the crop canopy, i.e., to look for major biomass/height differences as proxies for archaeological prospection.
In order to evaluate the results from the airborne LiDAR analyses, a benchmark needed to be established for “known” archaeology. This benchmarking data was drawn from ground geophysical, aerial, photographic, and ancillary data collected as part of the DART project. The geophysical surveys were used for the statistical analysis of the vegetation marks, as using features identified solely as vegetation marks from aerial photographic surveys risks confirmation bias. Both the resultant multi-temporal LiDAR-derived CHMs and the extracted LiDAR FWF metrics were quantitatively assessed for archaeological prospection using a Welch’s T-Test. Principal focus was on those areas in the four fields where there is known archaeology as confirmed by the magnetometer survey data. Here the returns over the known archaeology are compared with that over background, thus determining the significance of contrast. This was conducted using a 16 × 16 pixel (3.4 m radius) kernel/moving window for each pixel that corresponds to the known archaeological features as revealed by the magnetometer survey in each field. Visual comparisons between the LiDAR data and the aerial photography were then undertaken, since this allowed the comparison of archaeological feature omission and commission between the different sensors in different contexts. This comparison enables the determination of the potential impact of the approach in different contexts in terms of detection complementarity, and how the approach addresses biases or deficiencies in current detection techniques.
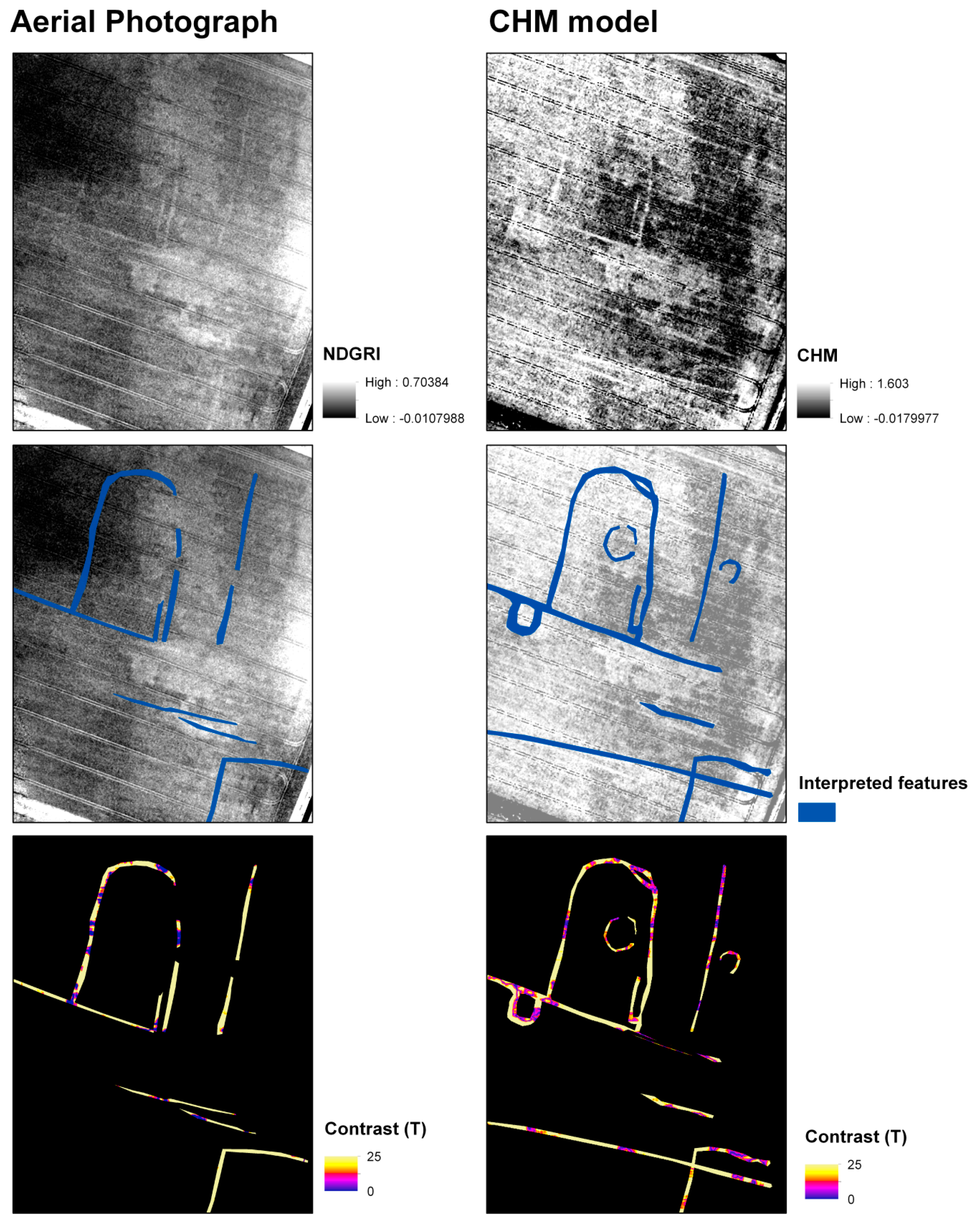
To test the suitability of this methodological approach, a test on an area of unknown archaeological potential, located approximately 200 m west of Harnhill Quarry Field using data acquired on the 20th of June 2012, was undertaken. The area was under a flowering crop of winter wheat during this period, and no vegetation marks were visible on the ground surface. No archaeological features had been identified in this area. Here, we used the multi-temporal LiDAR-derived CHM, and the NDGRI index derived from the RGB June 2011 ortho-imagery was used for comparison. Both datasets were examined under a variety of histogram stretches and those features interpreted as being of likely archaeological origin were digitized.
5. Discussion
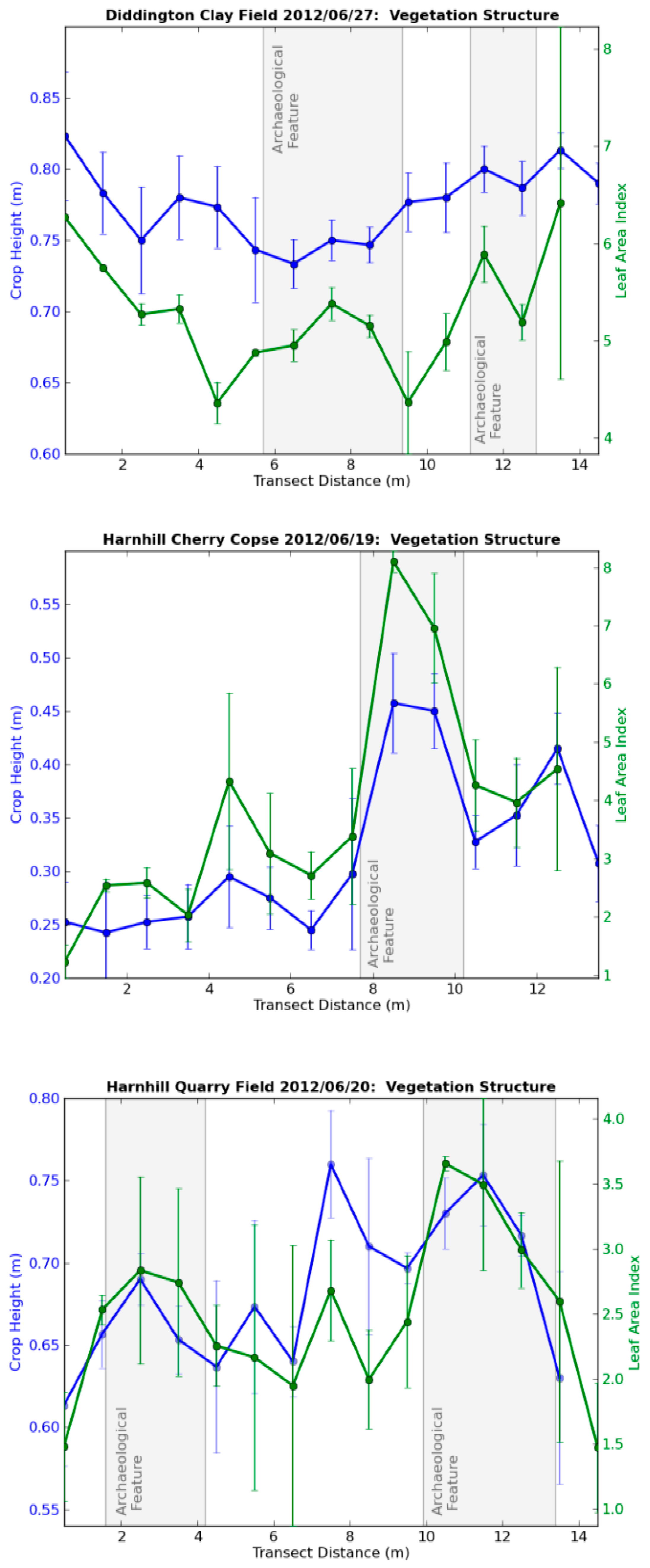
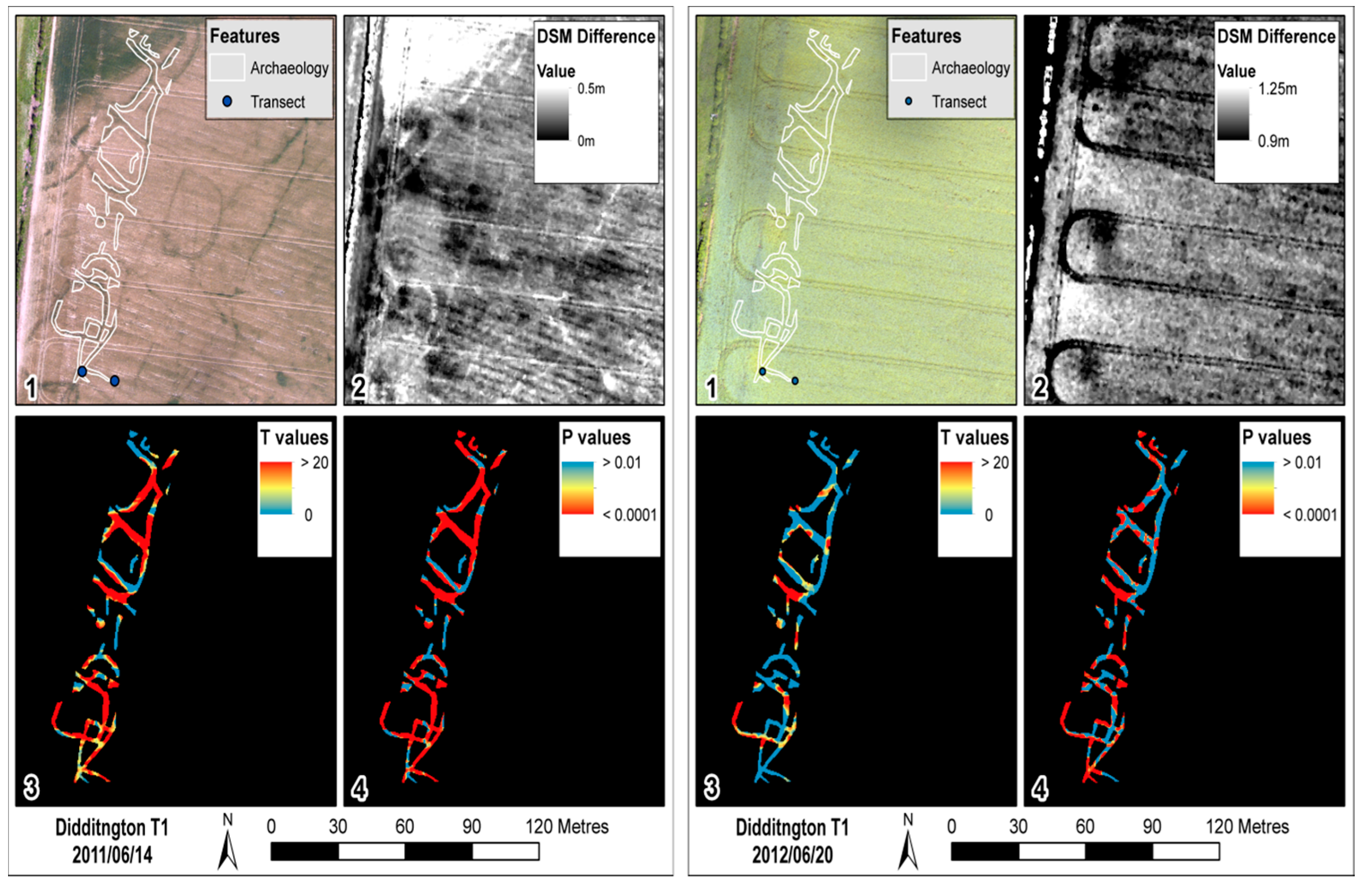
This study explored the value of airborne LiDAR data for detecting archaeological features, using vegetation as a proxy for any differences in soil properties arising due to the presence of archaeological features. The conditions that give rise to optimal contrast in vegetation are a complex interaction of local conditions. This study attempts to unpick these in an experimental setting. Across different sites with different vegetation types, on different soils, with different climate and weather, it has been demonstrated that, where the presence of archaeology manifested itself in biomass variability in the overlying vegetation (as represented by LAI and/or height), this could be detected to varying extents in the airborne LiDAR data. Of the two approaches investigated, it was that which utilises multi-temporal airborne LiDAR discrete return data to produce canopy height models that is recommended for future consideration. Where there was a change in the canopy biophysical properties, this was also discernable in the CHMs and this was particularly evident the in oil seed rape crop in the Diddington DDT1 field, which has a soil comprising free-draining river deposits over Oxford Clay (
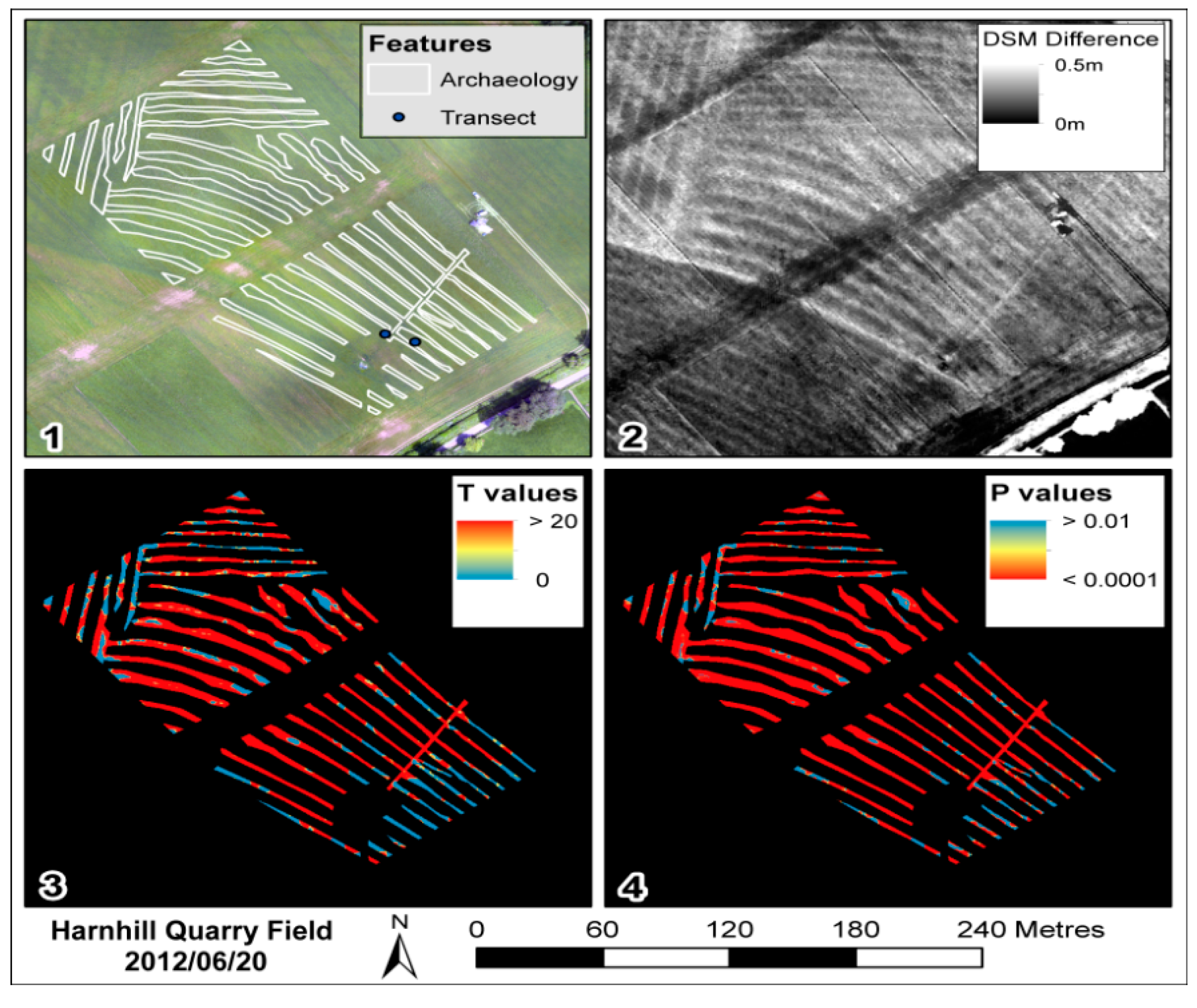
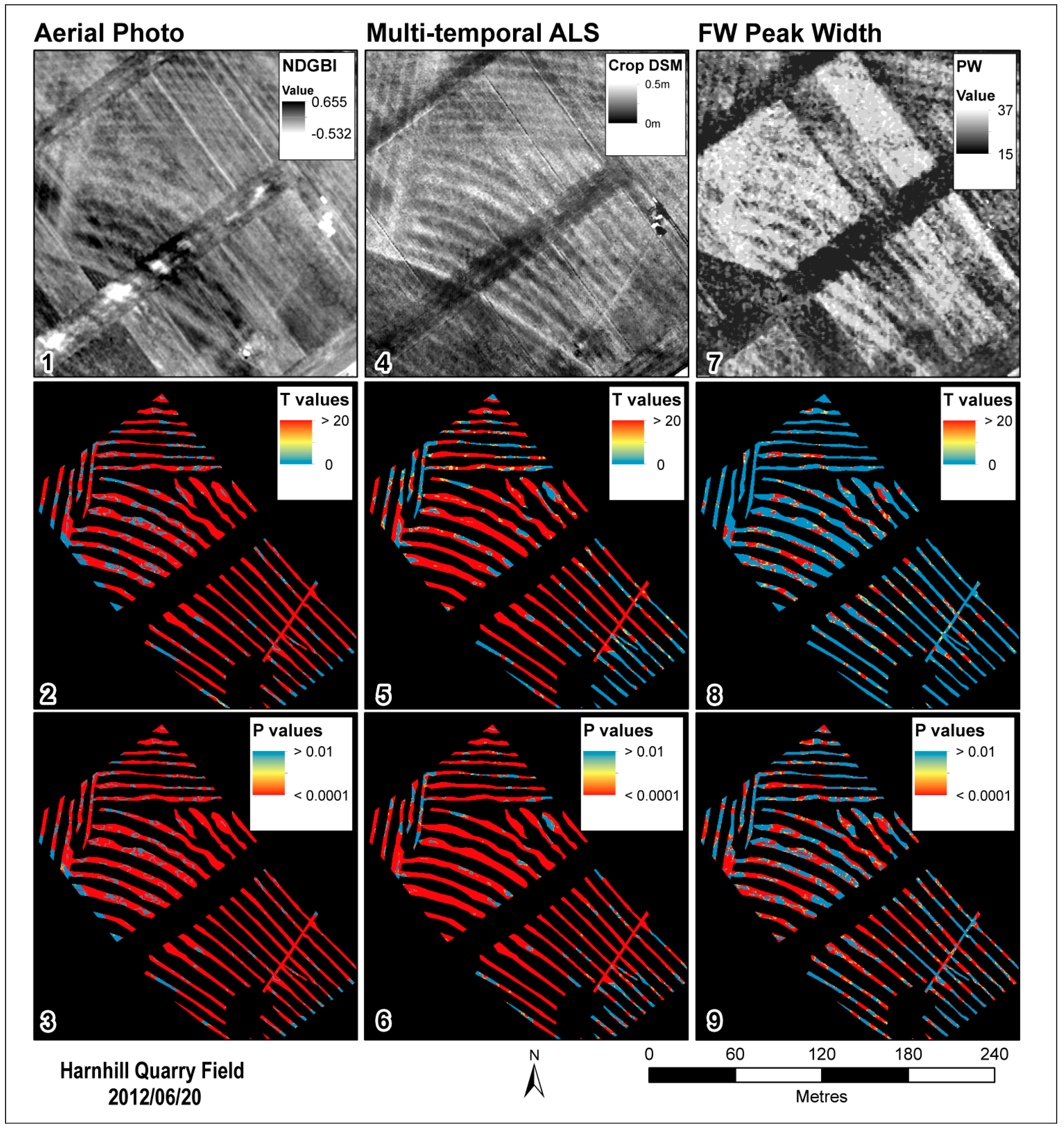
Figure 4), as well as in the spring wheat crop in the Harnhill Quarry field which has limestone Cornbrash soil on a clayey signet member (
Figure 6). The other two fields exhibited less contrast between CHM over archaeology
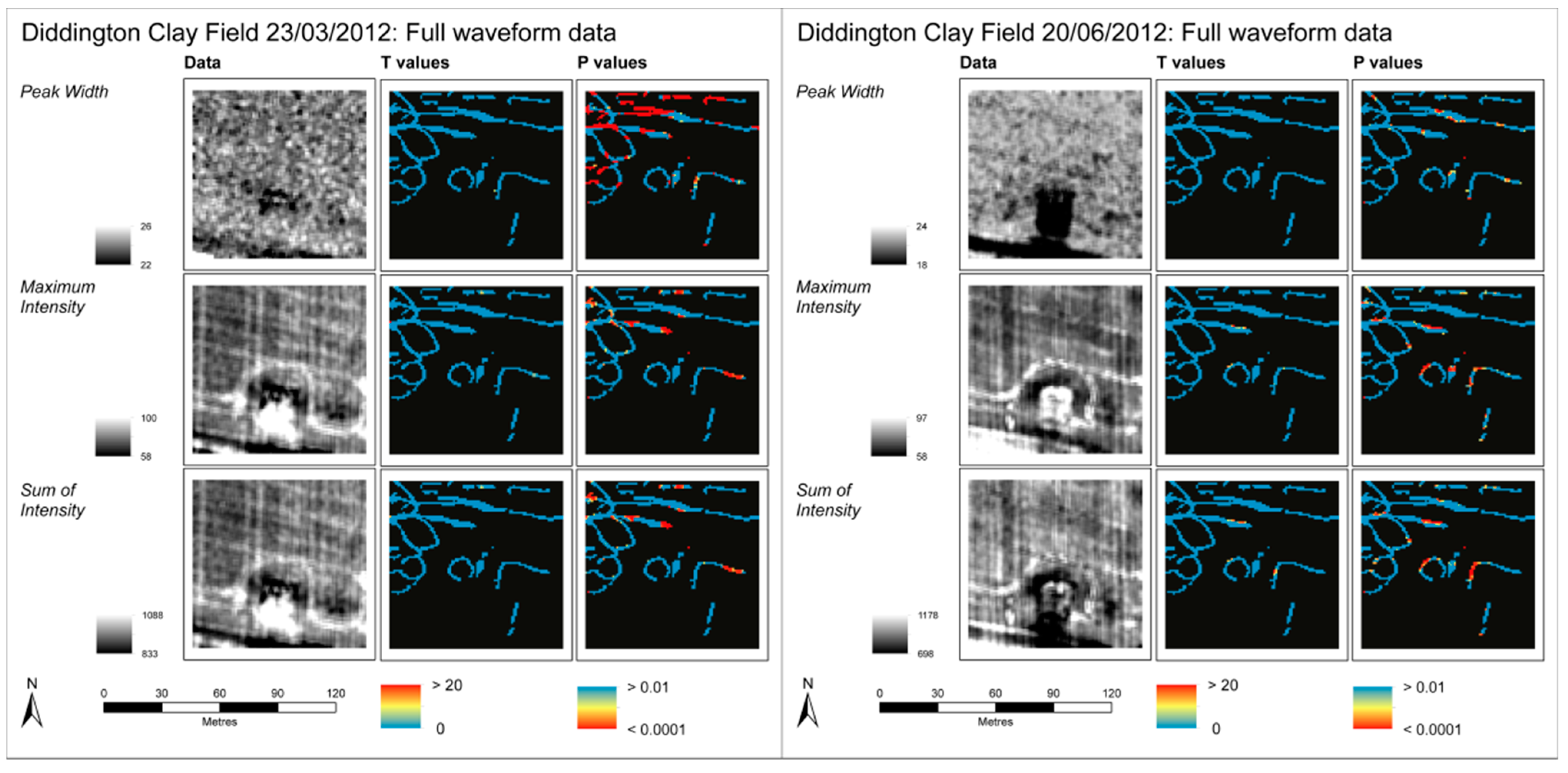
vs. non-archaeology. In both the field transect data (
Figure 3) and the CHM data (
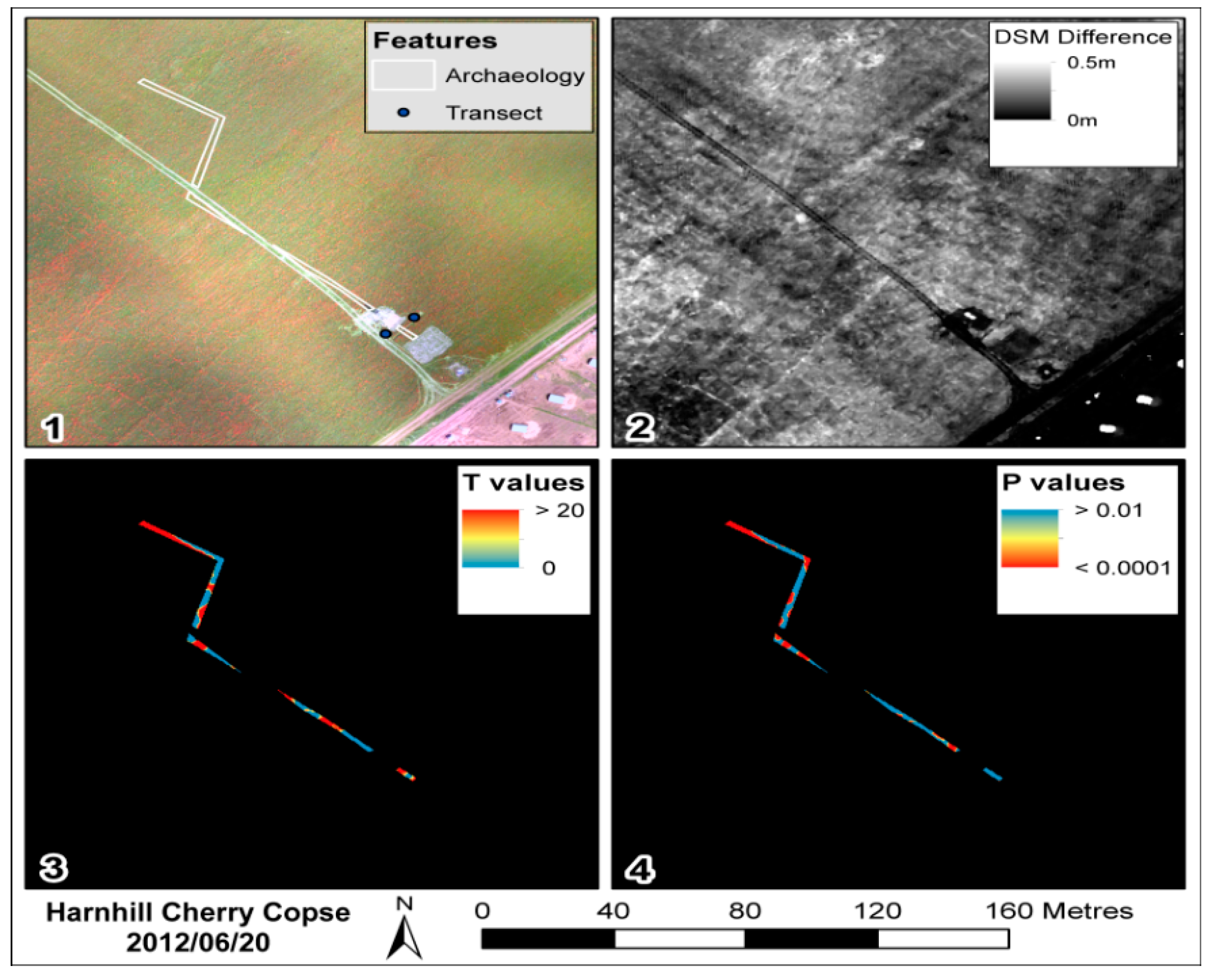
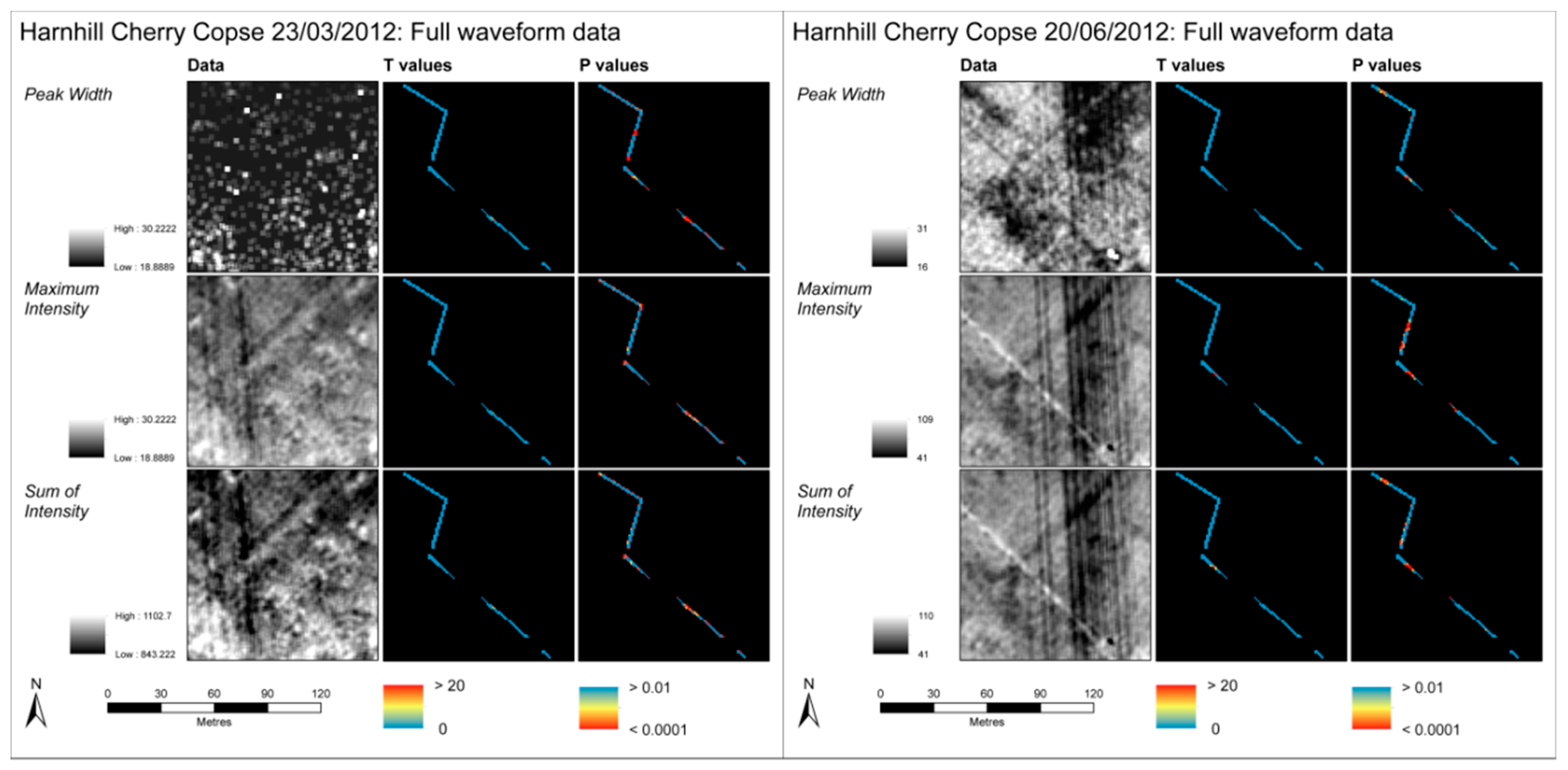
Figure 5) for the Diddington Clay Field, there was no real evidence of canopy changes due to the presence of archaeology, again illustrating the difficulty of detection in soils dominated by clay in this case, having a mid-Pleistocene till). The Harnhill Cherry Copse transect measurements show a sharp increase in crop height and LAI over the archaeology, but these were not picked up to the same extent in the CHM data due to some the crop being destroyed (trampled) in the intervening period between transect measurements and airborne survey (two days). Nevertheless, these field transect measurements indicate that the hypotheses put forward has validity, and it is a worthy endeavor to attempt to utilize airborne LiDAR in this way; this is the first study to attempt archeological prospection in this way, and these results demonstrate much potential, particularly once a base-line bare earth model is available for a site of interest.
This recommended use of multi-temporal airborne LiDAR data is not contingent on using the full waveform over discrete return data. Although the FWF data is capable of identifying the vegetation marks, the sensor is not capable of resolving the subtle contrast in the canopy as well as other methods; where contrasts are detectable using the FWF data, these were stronger and more apparent using the multi-temporal LiDAR derived CHM. This finding may change, however, with increasing data density [
42]. However, the full waveform approach is attractive in that it requires only one survey date to be performed and does not require a base-line bare earth model. With both methods investigated here, a number of issues have been highlighted that require further investigation were this to develop into a more operational method to overcome the prospection bias that has arisen. These are discussed below.
5.1. Canopy Interactions
Given the footprint of the LiDAR sensor, it is suggested that the LAI is more important than the vegetation height in giving rise to any contrast seen in the modelled data. This was particularly apparent in the field measurements taken at the Diddington Clay Field in 2012, which illustrated that it was the LAI rather than the canopy height that differed between the archaeology and the background (
Figure 3). An increase in LAI represents an increase in vegetation coverage and a canopy that is more “closed”. Theoretically, this provides a greater likelihood that the LiDAR pulse will interact with the canopy and that this will be reflected in the strength of the returned echo [
43]. As to whether this is “detectable” in the LiDAR sensor (FWF or discrete) is dependent on how the returned signal is post-processed by the sensor system. We have assumed that the increase in LAI in turn increases the signal to noise ratio, which improves detection. The crop height, however, is measuring the extremity of individual plants within the canopy, whereas the field ceptometer measuring LAI and LiDAR-derived CHM are sampling multiple plants. Even with the generalizing effect of the 0.2 m footprint of the ALS pulses, typical planting densities in wheat for this study of 100 plants/m
2 mean that the probability of a return being digitized from the tallest point of the plant is comparatively low. In terms of the FWF LiDAR data, we would expect the peak width metric to be most sensitive to variations in the density and structure of the canopy. Increased LAI and crop height should mean that the recorded waveform is wider, as the pulse from the sensor takes longer to reach the ground. However, this is at the limit of the resolution of the FWF sensor. In addition, in very dense crops the pulse may not reach the ground at all, as was evident at Diddington DDT1 during summer 2012, which had the greatest peak width over the tramlines where the vegetation is least dense. FWF data allows the end user to have more control in the interpretation of the process [
30]. Advances in processing methods, for instance [
32,
44], mean that extraction of metrics and computation of the data models improve in accuracy, giving the potential of improved archaeological detection due to more subtle contrast in canopy properties being resolved. Of course, using the full waveform, which offers increased pulse detection reliability, accuracy, and resolution [
28,
29,
30], will, in turn, improve the accuracy of surface models produced and thus could be used in the multi-temporal fashion advocated here.
5.2. Multi-Temporal Airborne-LiDAR Datasets
DART has been fortunate enough to have access to a rich multi-temporal remote sensing dataset. Airborne LiDAR is a relatively expensive resource and justification is required to undertake even individual surveys. However, archives are being opened up that could be exploited. Moreover, laser scanners on UAV platforms have the potential to both increase the spatial resolution of the resultant model and reduce the cost of surveys. The increase in spatial resolution may be critical and will bridge the scale gap between the results observed in the sensor and the measurements recorded on the transect surveys. Irrespective of the cost implications, LiDAR surveys are less reliant on weather conditions than optical sensors. This is important in countries like the UK where the weather is a real issue for scientific aerial surveys [
45]. The concept of mutli-temporal LiDAR studies is now taking hold due to more data now being available of the same study area [
46,
47]; however, this does mean that metadata concerning scanning hardware and post-processing is imperative to ensure consistency [
48].
By statistically analysing the differences between a “bare earth” and “vegetation surface” model, it has been demonstrated that archaeological features can be detected. One benefit of the proposed technique is that once the “bare-earth” reference has been collected, these techniques can then be used with any subsequent data set assuming that there is no major change to the Earth’s surface in the intervening time frame. By focusing on LAI and canopy structure variations, the proposed techniques have the potential to extend the utility of LiDAR surveys, as features can be detected that are neither expressed as micro-topography or as intensity differences. This would mean that the underlying phenomena could only be captured by sensors that capture the contrast that are expressed in this way. The development of multi-spectral LiDAR [
49] and the fusion of LiDAR data with spectral information from passive optical sensors [
50] further extend the capabilities of these techniques. The integration of LiDAR and imaging spectroscopy techniques will help address the biases introduced by an over-reliance on the visual component of the electromagnetic spectrum [
9,
51,
52]. An improvement in the science base, coupled with policy frameworks that facilitate changes in techniques with accompanying funding flexibility, are required to make the most of this. Other remote sensing devices and modes of operation have the potential to improve detection of archaeological residues (e.g., point clouds from cameras on board UAVs [
53]), as their ability to detect subtly expressed contrasts affords the opportunity to both extend the temporal window for detection and detect subtly expressed features that cannot be detected using conventional aerial photography.
5.3. Data Acquisition Issues
Timing of data acquisition is a factor that needs to be considered. Diddington DDT1 in 2011 represented optimal conditions for data acquisition, where the vegetation marks were exceptionally clear due to the combination of drought [
38], crop type, and soil type. However, during the same period, Diddington Clay Field, less than 1 km to the west, shows little contrast, a result of a different crop and clay soils where better moisture retention means that the variations in water resource constraint caused by archaeology and affecting the development of the crop are less pronounced [
1]. On the other hand, 2012 was one of the wettest years on record, yet the clearest vegetation marks are evident in the clays at Harnhill Quarry field. Further work is required to resolve the problem of “what conditions” are appropriate for vegetation mark formation and, hence, detection with a particular sensor. Even with improvements in this knowledge, there is unlikely to be a single optimal window for data acquisition that can be applied across different soils and crops in the same geographic region. However, being able to extend the duration of the window within which these contrasts can be detected, as offered by airborne LiDAR, could provide significant operational flexibility.
5.4. Does Vegetation Mark Detection via Airborne LiDAR Add Value?
Conventional visible spectrum recording of archaeological vegetation marks rely on contrasts in colour and tone to identify potential archaeological features. Vegetation colour is the conflation of a number of properties: crop state, LAI, and absorption of visible light by photosynthetic and assistive pigments. Vegetation colour can vary markedly over short temporal windows as the crop adapts to changing resource availability or changes state. Canopy biomass (via height) is indicative of the ability of the soil to support a greater quantity of vegetation. Hence, vegetation colour differentials can be indicative of short term responses to localised conditions or vegetation states, whereas vegetation height differentials are more likely to indicate long-term developmental constraints reflecting differences in the soil. Where the soil and vegetation type is appropriate a canopy height approach has the potential to dramatically extend the window of opportunity for the detection of archaeological features. Furthermore, this may mean that this technique can be used to detect a range of different archaeological features on different soils under different crops. This is a problem which has limited the use of large scale vertical surveys where the conditions for detection have more constraints.
This is exemplified by the surveys at Harnhill Quarry Field, which is located on clayey soils not generally conducive to vegetation mark formation. While both the aerial photography and the FWF data can identify the features in this field, the CHM method provides the greatest contrast. This indicates that this method has great potential for prospection of difficult soil, as if it can be used successfully in these difficult conditions, it is likely applicable elsewhere. This may be enhanced by the development of multi-spectral LiDAR systems [
26]; if the instrument arrays can employ multiple wavelengths that facilitate the spectral separation of archaeological features, improved detection follows. Moreover, the increasingly common full waveforms approaches affords a unique perspective for feature detection, and could prove promising in fusion with other remotely sensed data, especially in heavily vegetated (wooded) environments. Deploying these sensors successfully requires a fine-grained understanding of the interactions between the underlying archaeology (its form and likely composition), environmental processes, and the vegetation canopy. To maximise impact, we need to understand not only the conditions under which sensors successfully detect archaeological features but also the overlap in detection between different sensors. If multiple sensors detect the same phenomena, then the most applicable sensor is the one that detects the phenomena over the greatest temporal window. Conversely, knowing that certain phenomena are only detected by a specific sensor will improve the justification for the deployment of that particular sensor. With this form of understanding there is the potential to both detect more subtly expressed features not detected using the more established aerial photography and, by virtue of the fairly limitless data acquisition conditions afforded by this active remote sensing method, to fully exploit temporal window for the detection of vegetation marks.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












