
SPOT-4 (Take 5): Simulation of Sentinel-2 Time Series on 45 Large Sites

 ,
,
Abstract
:
1. Introduction
- Resolution: 10 m, 20 m or 60 m, depending on the spectral band
- Coverage: all lands systematically observed, with a field of view of 290 km
- Revisit: each land pixel observed every fifth day with a constant viewing angle
- Spectral: 13 spectral bands in the visible, near infrared (NIR) and short wave infrared (SWIR) domains, among which three bands are dedicated to atmospheric correction, a blue band for aerosol and cloud detection, a water vapor band in the NIR and a band to detect high clouds in the SWIR.
- ESA provided simulated data resulting from aerial acquisitions, with the 13 spectral bands at the proper resolutions, but with a very small coverage and no repetitivity;
- CNES and Centre d’Etudes Spatiales de la Biospher̀e (CESBIO) provided Formosat-2 satellite time series with the appropriate repetitivity at a constant viewing angle and 8-m resolution, but with a small coverage ( km) and only four bands (and no SWIR) [4];
- Landsat data with adequate coverage and good spectral richness could also be used; however, the repetitivity is much lower (16 days), and the resolution is only 30 m;
- SPOT and RapidEye imagery have the necessary resolution and may cover large sites, but do not provide repetitivity with constant angles and only have four or five bands, respectively;
- Resolution: 20 m
- Coverage: 45 sites, observed with a field of view of 60 to 120 km using both SPOT-4 HRVIR (Haute Résolution Visible et InfraRouge)instruments. By merging observations from adjacent orbits, it was possible to obtain 200 km-wide sites.
- Revisit: five days with constant viewing angles.
- Spectral: four bands, including a SWIR band (green, red, NIR and SWIR)
2. List of Available Sites
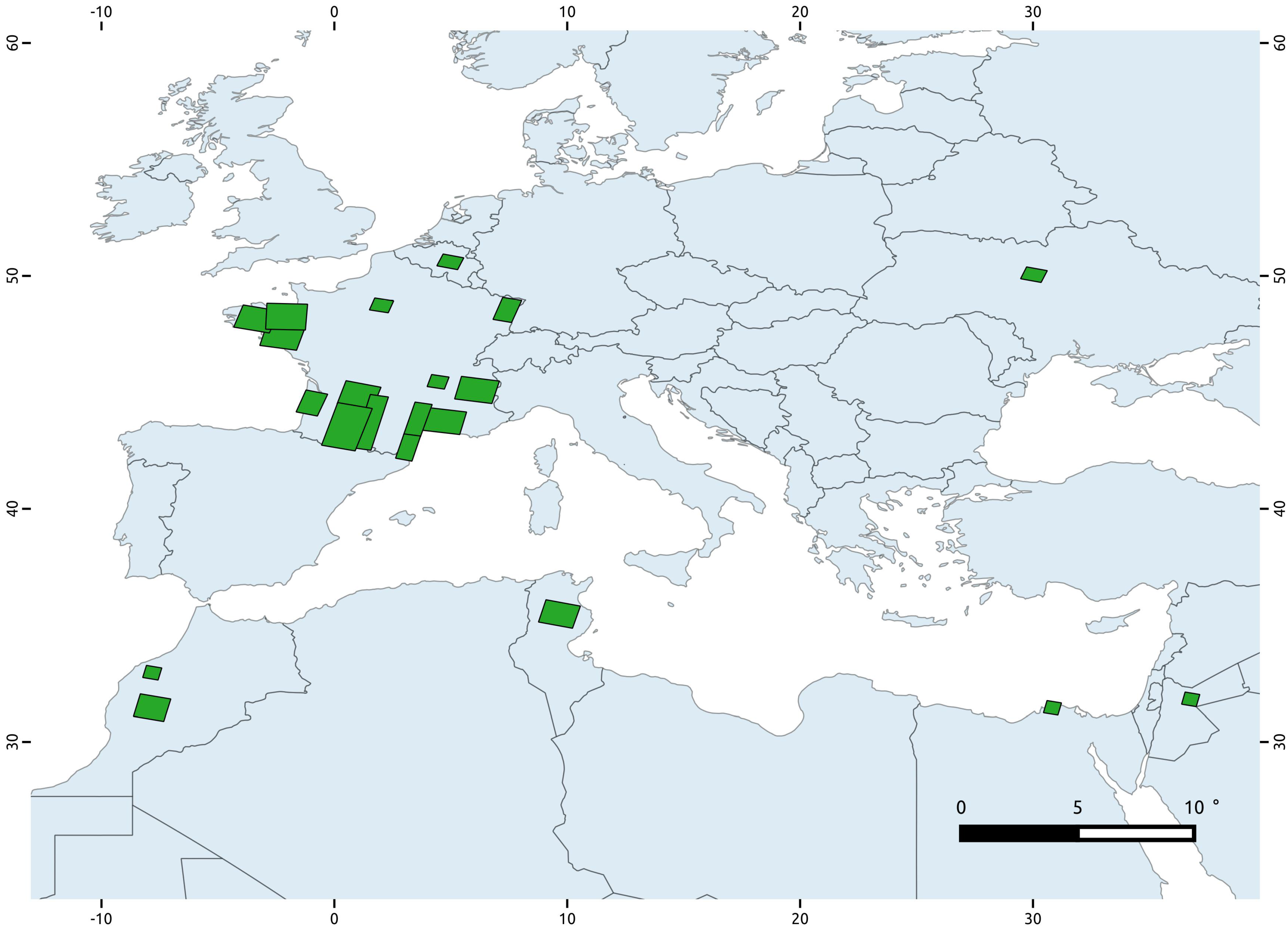
- In France, it was decided to issue a call for site proposals to the French scientific community and to French public institutions. Twenty site proposals were received, and sixteen sites were finally chosen, 11 of which were in France. Some larger sites were composed of several images, as shown in Figure 1.
- At the international level, the schedule was too short to issue a call for proposals, and we contacted only space agencies with which collaborations were already in place in the optical remote sensing domain. The European Space Agency (ESA), the National Aeronautics and Space Administration (NASA), the European Commission Joint Research Center (JRC) and the Canadian Center for Remote Sensing (CCRS) joined the experiment, selected several sites (see Table 1) and shared a part of the cost.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site | Longitude | Latitude | Agency | Size (km) | AeroNet Site |
|---|---|---|---|---|---|
| ALPES | 5.769 | 45.153 | CNES | - | |
| ALSACE | 7.4658 | 48.5539 | CNES | - | |
| AQUITAINE | −0.953 | 44.535 | CNES | Arcachon | |
| ARDECHE | 4.484 | 45.472 | CNES | - | |
| LOIRE | −2.595 | 47.45 | CNES | - | |
| BRETAGNE | –3.718 | 48.217 | CNES | - | |
| RENNES | −2.05 | 48.27 | CNES | - | |
| CHINA (1) | 115.993 | 29.32 | CNES | - | |
| CONGO (1) | 16.898 | 3.092 | CNES | - | |
| MADAGASCAR | 46.674 | −19.582 | CNES | - | |
| MOROCCO(1) | −8.152 | 31.518 | CNES | - | |
| PROVENCE | 4.322 | 43.803 | CNES | Carpentras, le Frioul | |
| LANGUEDOC | 3.36 | 43.3768 | CNES | - | |
| ROUSSILLON | 3.15 | 42.6 | CNES | - | |
| SUDMIPY E | 1.5701 | 43.7292 | CNES | Seysses, Le Fauga | |
| SUDMIPY O | 0.201 | 43.651 | CNES | - | |
| DORDOGNE | 1.1 | 44.9 | CNES | - | |
| TUNISIA | 9.342 | 35.583 | CNES | Ben Salem | |
| VERSAILLES | 2.0024 | 48.7595 | CNES | - | |
| CCRS | −111.65 | 57.0208 | CCRS | - | |
| ARGENTINA | −59.577 | −34.196 | ESA | - | |
| BELGIUM | 4.985 | 50.64 | ESA | Bruxelles | |
| CHESAPEAKE | −76.115 | 37.7926 | ESA | Wallops | |
| CHINA (2) | 116.569 | 36.831 | ESA | - | |
| EGYPT | 30.826 | 31.484 | ESA | - | |
| ETHIOPIA | 37.8571 | 9.1291 | ESA | - | |
| GABON | 10.8063 | 0.3755 | ESA | - | |
| JORDAN | 36.825 | 31.831 | ESA | - | |
| KOREA | 126.150 | 35.1472 | ESA | Gwanju | |
| MOROCCO (2) | −7.817 | 32.9667 | ESA | Saada, Ouarzazate | |
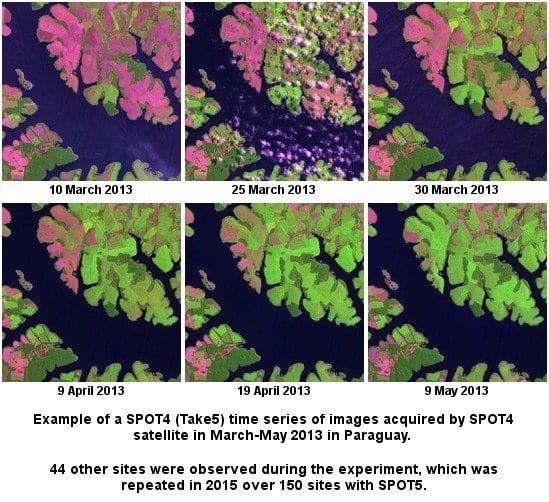
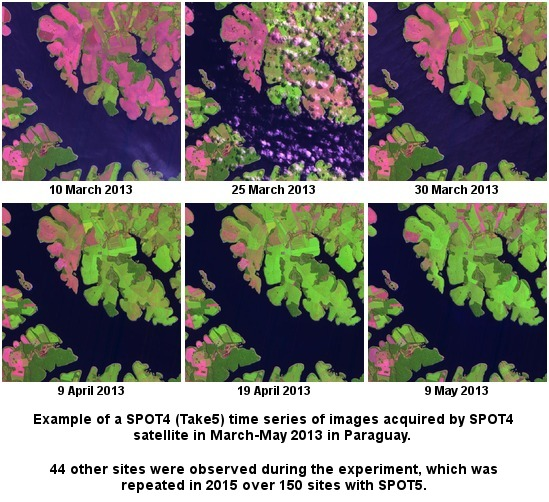
| PARAGUAY | −54.916 | −25.285 | ESA | - | |
| CONGO (2) | 15.9527 | 0.9046 | ESA | - | |
| SOUTH AFRICA | 26.61 | −27.38 | ESA | - | |
| UKRAINE | 30.11 | 50.075 | ESA | Kyiv | |
| ANGOLA | 20.5761 | −15.2522 | JRC | - | |
| BOTSWANA | 23.8145 | −22.6868 | JRC | - | |
| CAMEROON | 8.98 | 4.58 | JRC | - | |
| BORNEO | 115 | 1 | JRC | - | |
| HONDURAS | −85 | 15 | JRC | - | |
| THAILAND | 98 | 19 | JRC | - | |
| SUMATRA | 102.75 | 0.5 | JRC | - | |
| TANZANIA | 36.2259 | −7.2004 | JRC | - | |
| ZAMBIA | 25.7171 | −14.3497 | JRC | - | |
| MARICOPA | −112.409 | 33.094 | NASA | - | |
| SOUTH GREAT PLAINS | –98.209 | 36.645 | NASA | Cart site |
- Large sites: Using both SPOT-4 HRVIR instruments, it is possible to obtain a swath of 110 km. Additionally, by joining sites acquired from two adjacent orbits on consecutive days, it is possible to obtain sites with a horizontal extent of 200 km and a length that is only limited by the available funding. Three very large sites and eight large sites have been acquired, obtained from adjacent swaths and named Sudmipy (about km), Bretagne-Loire ( km) and Provence-Languedoc ( km). These sites may be used to check that the processing methods can be applied to a large scale.
- Directional effect studies: from two adjacent orbits, it is possible to acquire overlapping sites under different viewing angles. Within SPOT-4 (Take 5), four sites were concerned with this possibility: Maricopa, Sudmipy, Provence-Languedoc and Bretagne-Loire. These sites can be used to study directional effect corrections and compositing methods to produce bi-monthly or monthly products.
- Aerosol validation sites: several sites may be used to validate aerosol estimates, because they are close to an AeroNet site: Sudmipy, Provence, Tunisia, Morocco, South Great Plains and Ukraine. There are other challenging sites regarding atmospheric correction, although no ground truth is available on these sites: very high aerosol optical thicknesses have been observed on the China (2), Cameroon and Congo sites.
3. Products and Processors
- Level 1C: ortho-rectified product expressed as top of atmosphere (TOA) reflectance
- Level 2A: ortho-rectified product expressed as surface reflectance, associated with a set of masks for clouds, cloud shadows, water and snow

4. Product Validation
4.1. Data Quality

4.2. L1C Validation
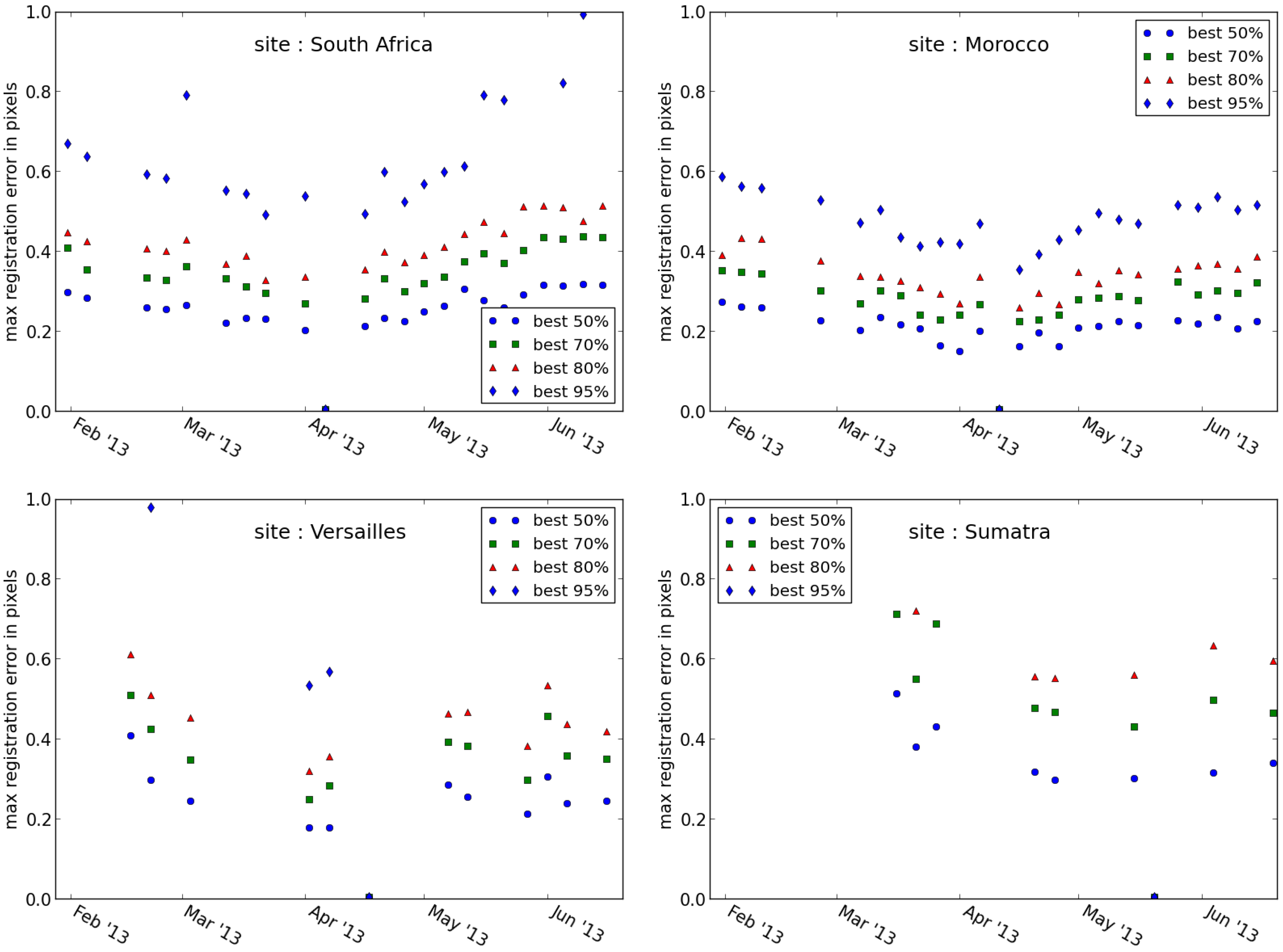
4.2.1. Geometry

4.2.2. Radiometry
4.3. L2A Validation
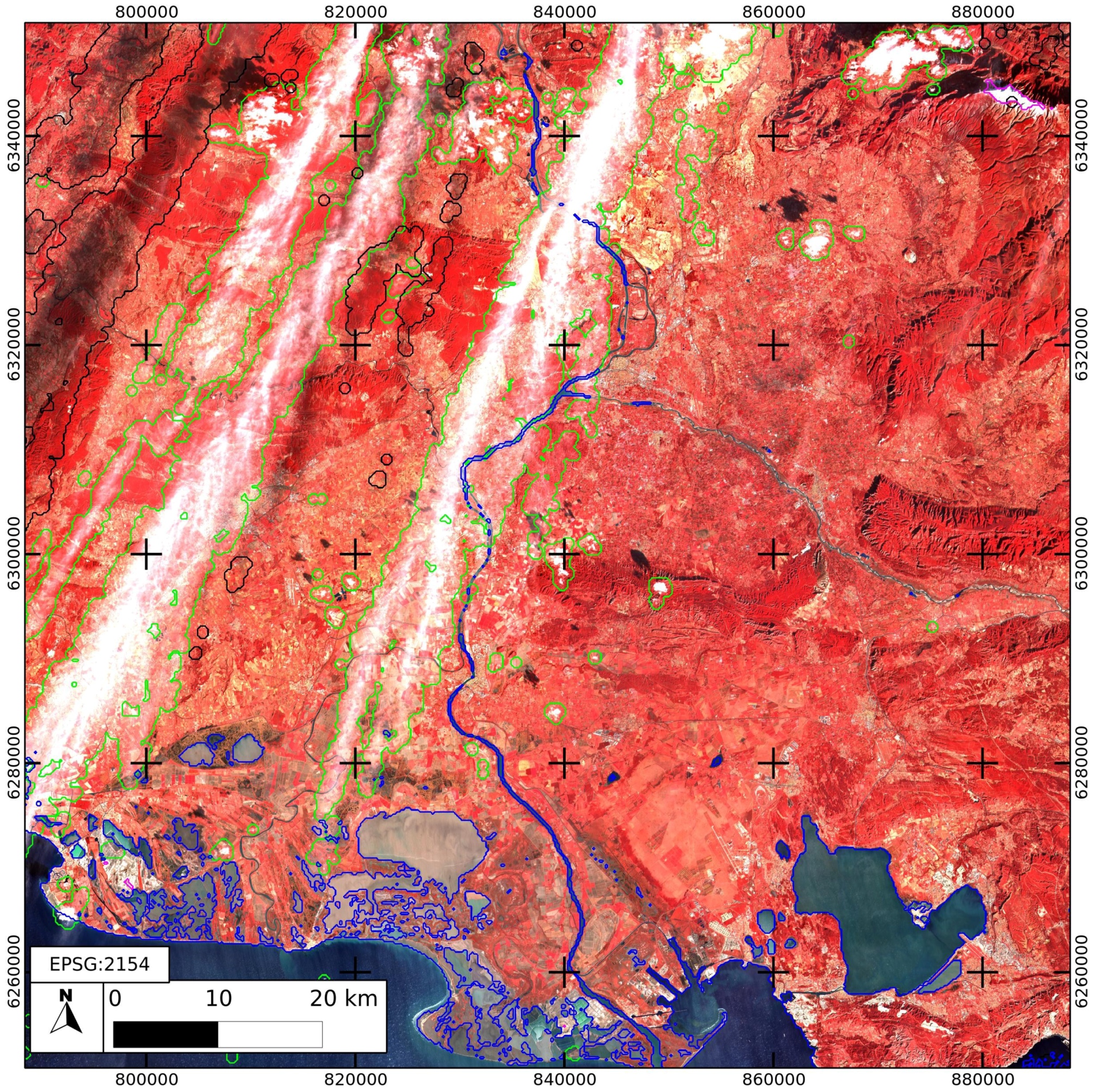
4.3.1. Validation of Cloud Masks
- Some cloud classification errors have been observed when the assumption on a slow variation of surface reflectance is wrong, for instance when a wet bare soil dries up and becomes brighter and whiter.
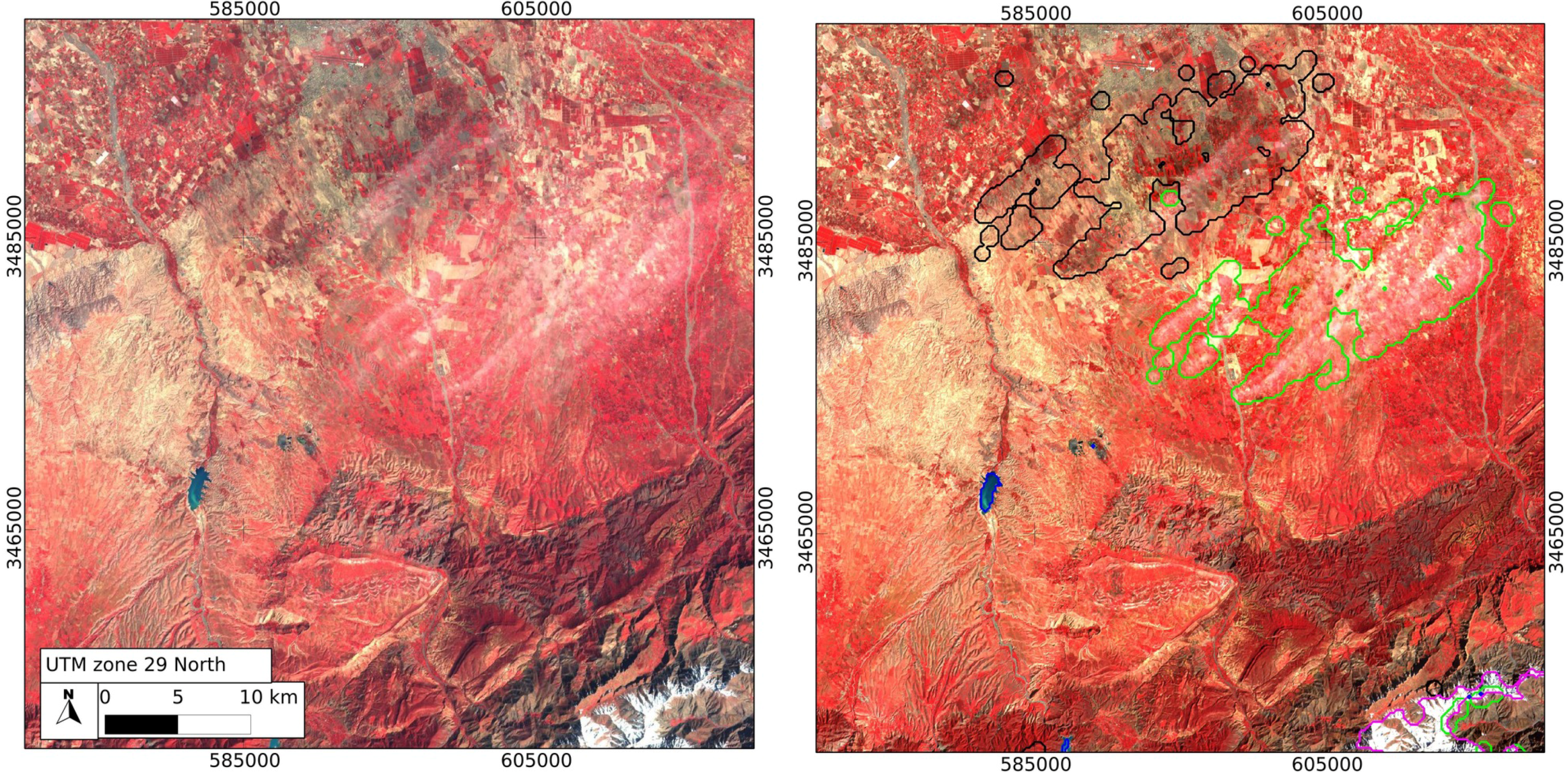
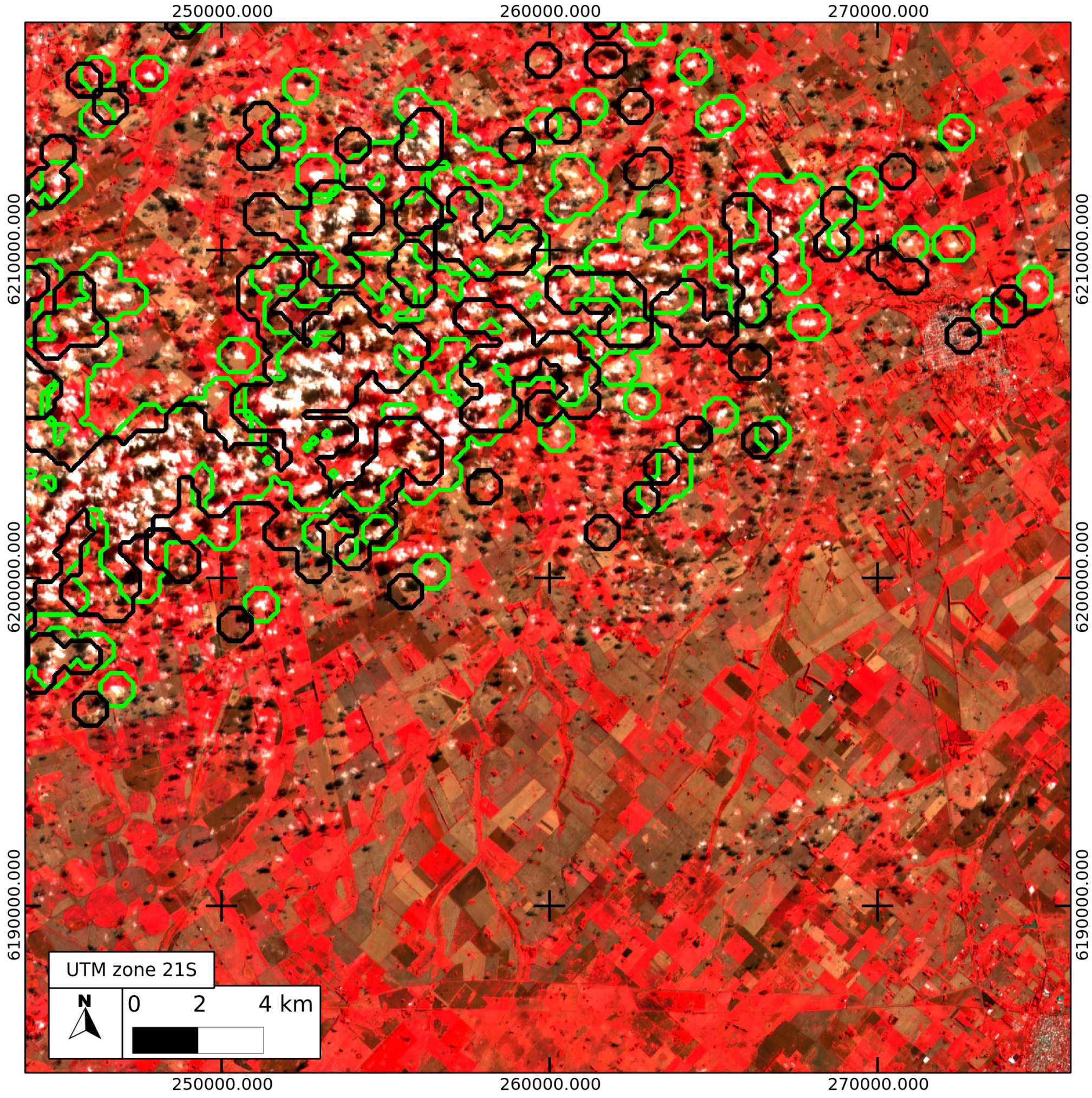
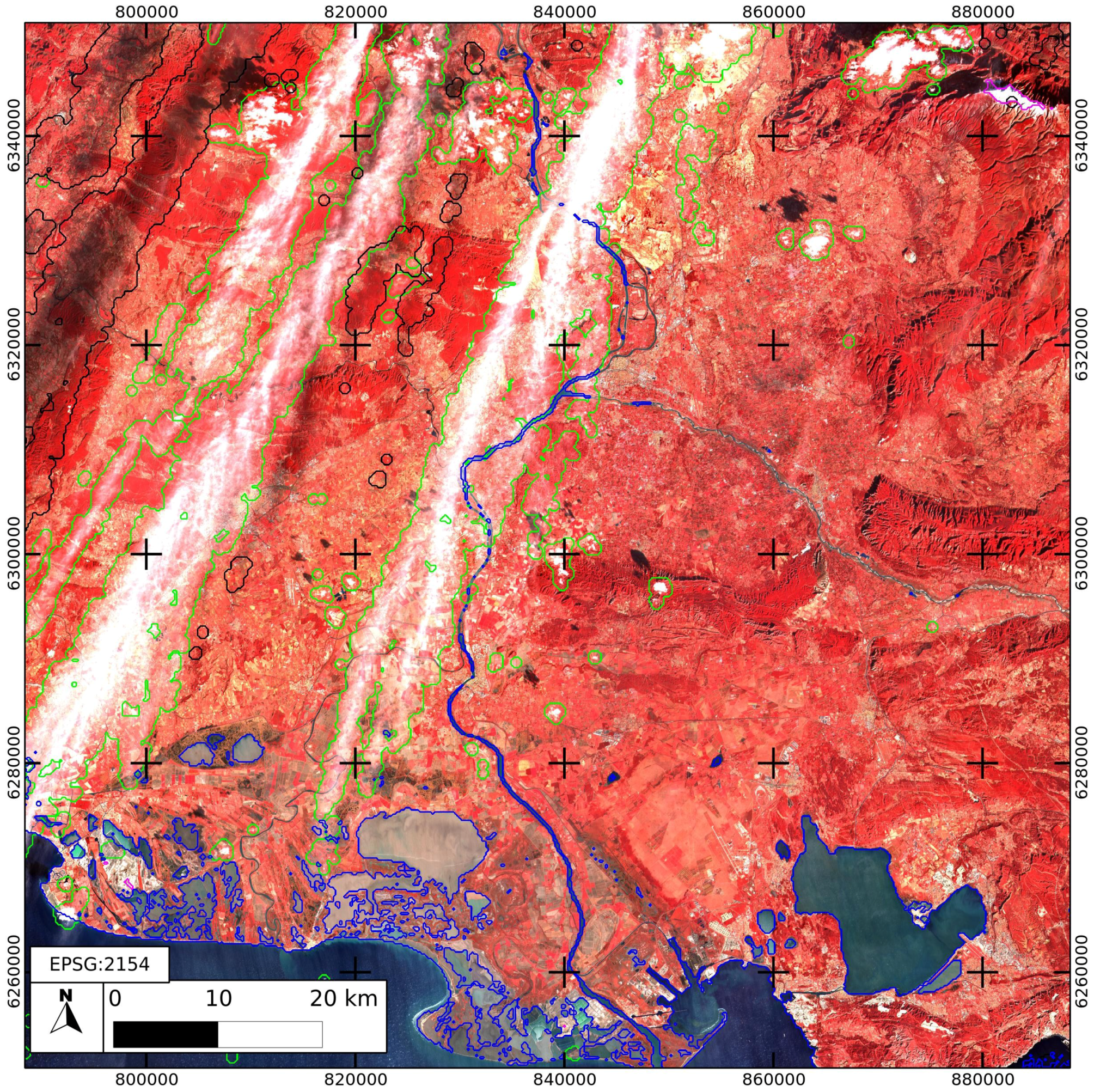
- As the cloud mask was computed at 200-m resolution, some small clouds escape the detection, as shown in Figure 6. To correct this problem, it is straightforward to work at a higher resolution, although, if the resolution is too high, some bright objects, such as buildings, may start to be classified as clouds. As the computer time is also a issue, working at a resolution between 50 and 100 m could be a good compromise. The SPOT-5 (Take 5) cloud mask will be generated at 100-m resolution.
- Over very uniform areas, such as equatorial forests, very thin clouds can easily be detected visually, but some of them may be undetected by our method, since the thresholds are constant throughout the world. As very subtle changes are sought on this kind of landscape, a few users reported that they had to refine the cloud mask. This problem could be solved by tuning the thresholds to stricter values above forests, but in the case of Landsat 8 and Sentinel-2, the band at 1.38 μm will enable one to detect very thin clouds provided they are high enough, reducing this kind of omission.
- Cloud shadows are even more difficult to detect than clouds, because many surfaces can become suddenly darker, such as a bare soil after irrigation or biomass burning. It is therefore difficult to separate the effect of irrigation and the faint shadow of a semi-transparent cloud. It was noticed that all the verifications done to check the validity of the shadow flag, described in the section above, can result in missing some of the real shadow pixels. More work is needed to optimize the cloud shadow mask.


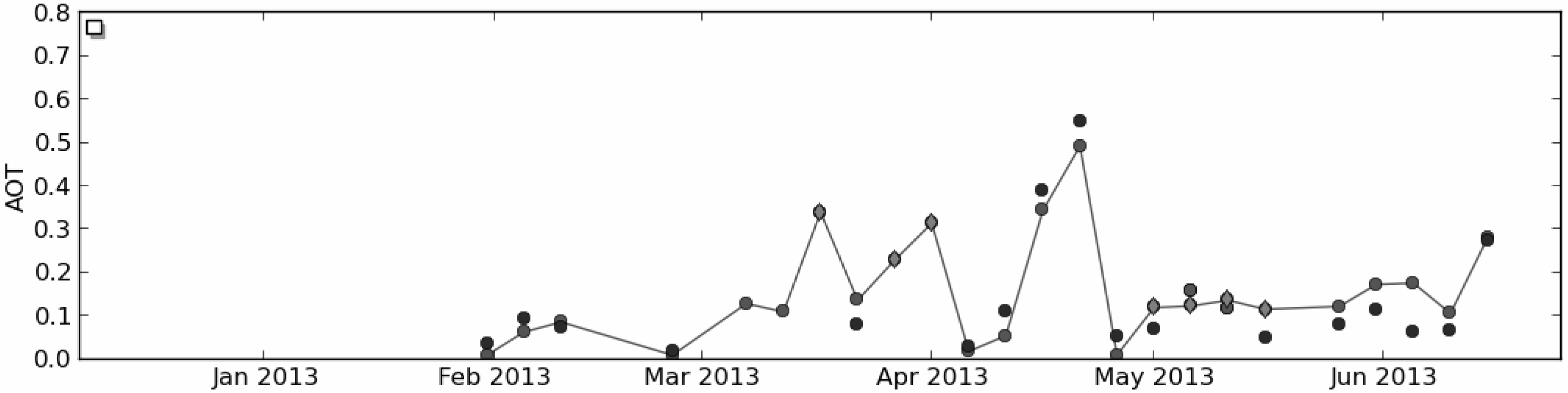
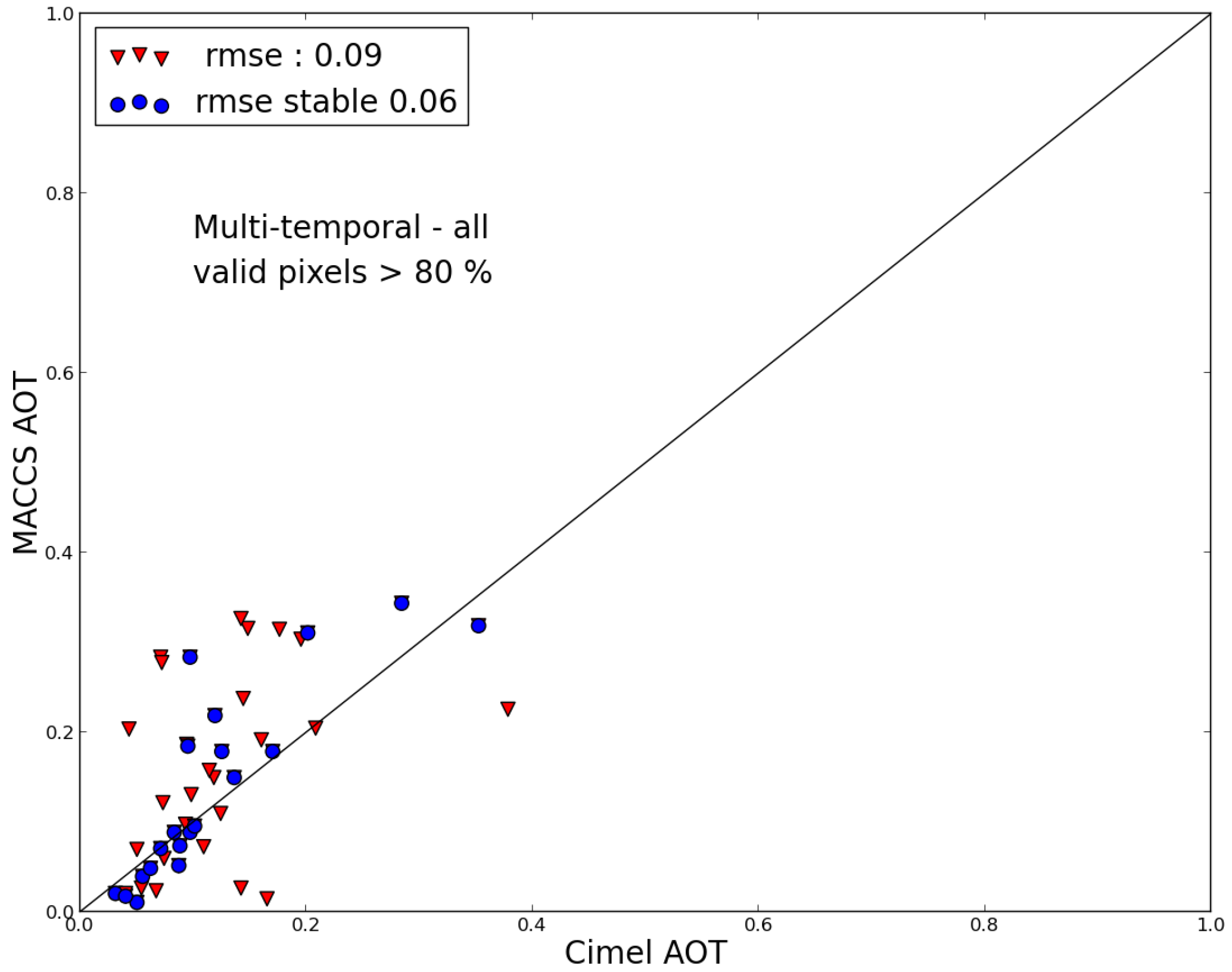
4.3.2. Validation of Aerosol Estimates


4.3.3. Validation of Surface Reflectances
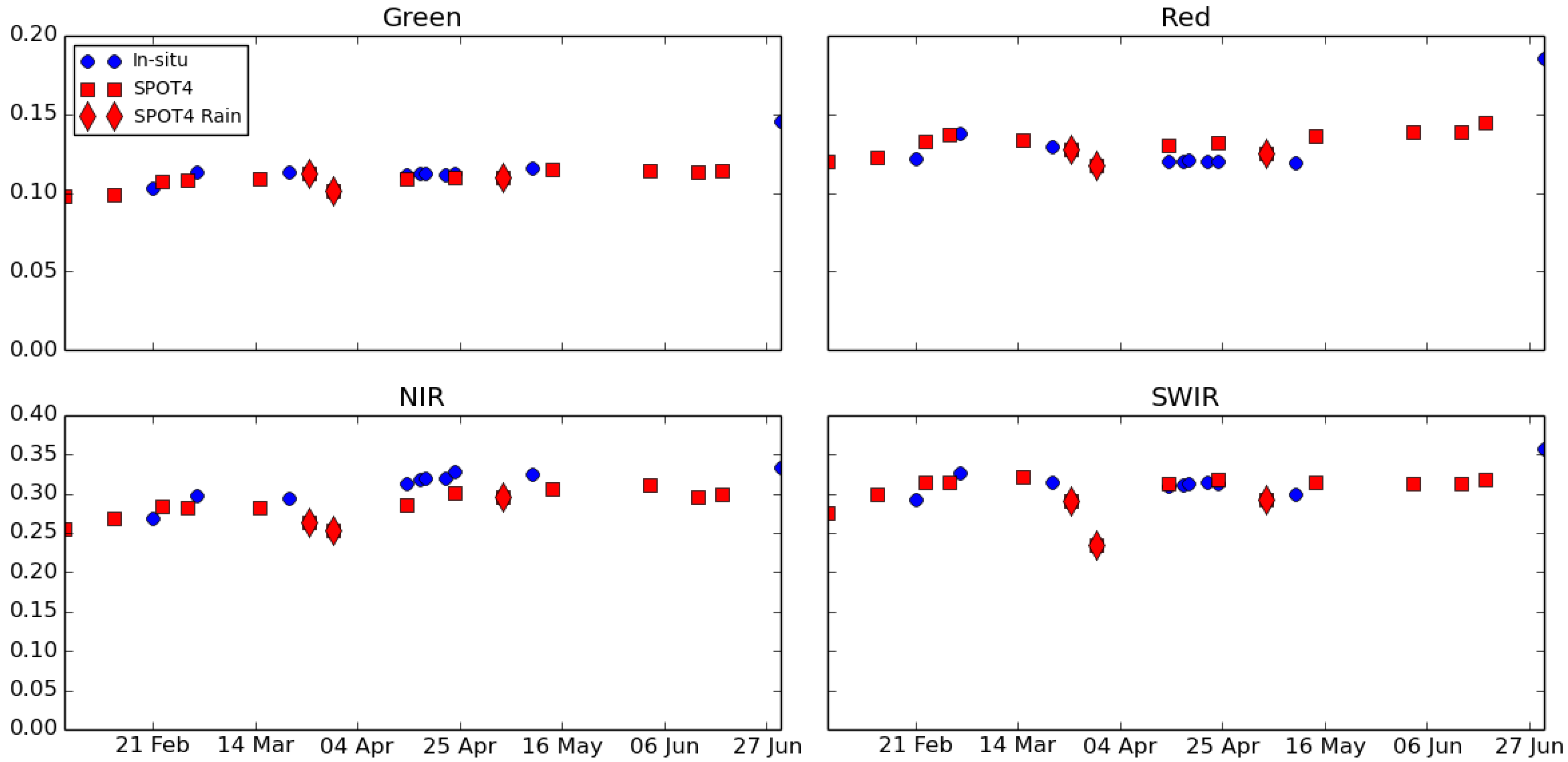
Comparison to In Situ Data

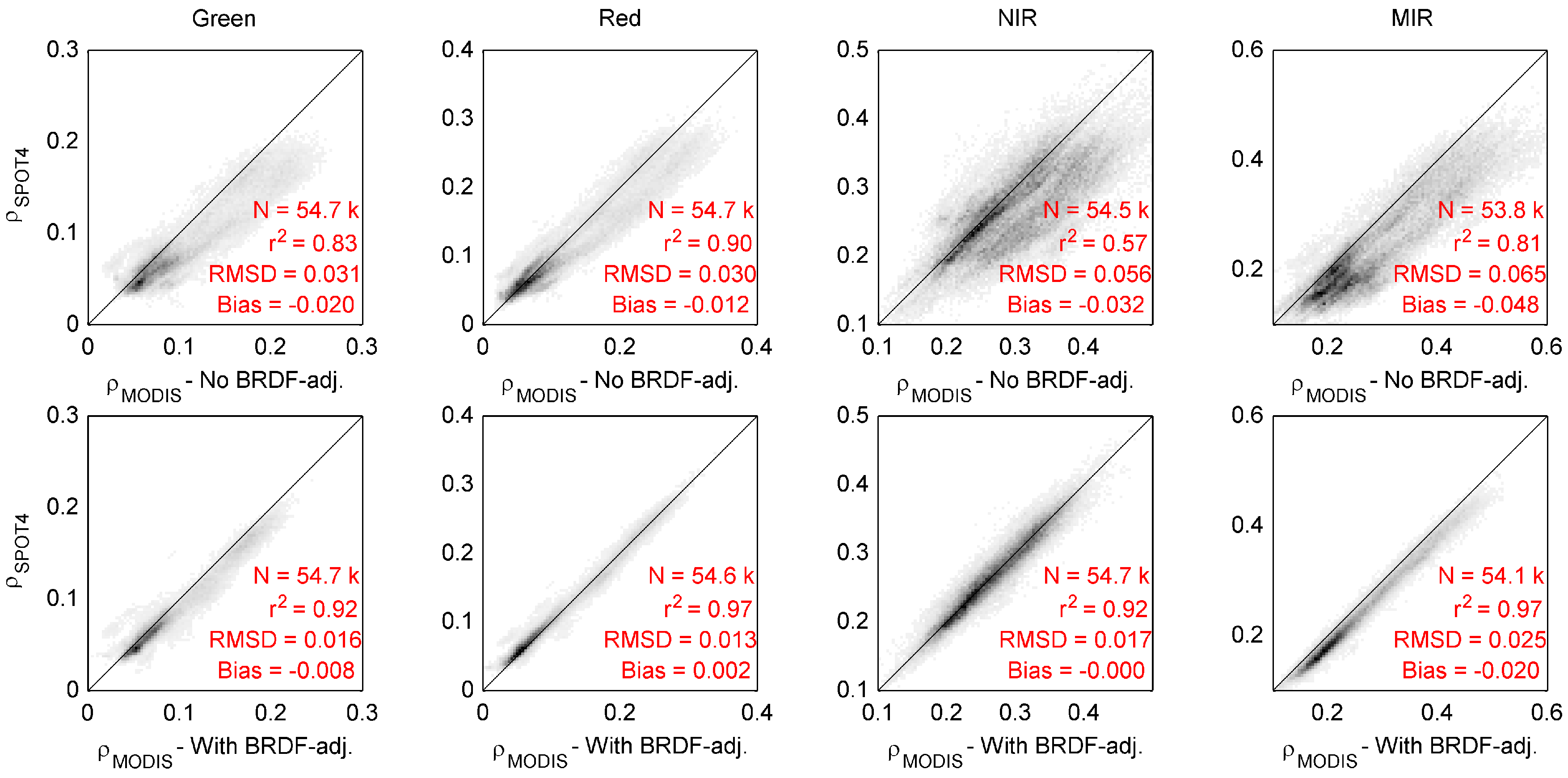
Cross-Comparison with MODIS Surface Reflectances

5. Conclusion and Lessons Learned
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s Optical High-Resolution Mission for GMES Operational Services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Maisongrande, P.; Duchemin, B.; Dedieu, G. VEGETATION/SPOT: An operational mission for the Earth monitoring; presentation of new standard products. Int. J. Remote Sens. 2004, 25, 9–14. [Google Scholar] [CrossRef]
- Tinel, C.; Fontannaz, D.; de Boissezon, H.; Grizonnet, M.; Michel, J. The ORFEO acompaniment program and ORFEO ToolBox. IGARSS 2012. [Google Scholar] [CrossRef]
- Hagolle, O.; Huc, M.; Villa Pascual, D.; Dedieu, G. A multi-temporal and multi-spectral method to estimate aerosol optical thickness over land, for the atmospheric correction of FormoSat-2, LandSat, VENµS and Sentinel-2 images. Remote Sens. 2015, 7, 2668–2691. [Google Scholar] [CrossRef]
- Bignalet-Cazalet, F.; Baillarin, S.; Greslou, D.; Panem, C. Automatic and generic mosaicing of satellite images. IGARSS 2010. [Google Scholar] [CrossRef]
- Baillarin, S.; Gigord, P.; Hagolle, O. Automatic registration of optical images, a stake for future missions: Application to ortho-rectification, time series and mosaic products. IGARSS 2008. [Google Scholar] [CrossRef]
- Hagolle, O.; Dedieu, G.; Mougenot, B.; Debaecker, V.; Duchemin, B.; Meygret, A. Correction of aerosol effects on multi-temporal images acquired with constant viewing angles: Application to Formosat-2 images. Remote Sens. Environ. 2008, 112, 1689–1701. [Google Scholar] [CrossRef] [Green Version]
- Hagolle, O.; Huc, M.; Villa Pascual, D.; Dedieu, G. A multi-temporal method for cloud detection, applied to Formosat-2, VENμS, Landsat and Sentinel-2 images. Remote Sens. Environ. 2010, 114, 1747–1755. [Google Scholar] [CrossRef] [Green Version]
- Arnaud, M.; Leroy, M. SPOT 4: A new generation of SPOT satellites. ISPRS J. Photogramm. Remote Sens. 1991, 46, 205–215. [Google Scholar] [CrossRef]
- Kubik, P.; Breton, E.; Meygret, A.; Cabrieres, B.; Hazane, P.; Leger, D. SPOT4 HRVIR first in-flight image quality results. Proc. SPIE 1998. [Google Scholar] [CrossRef]
- Meygret, A.; Dinguirard, M.C.; Henry, P.J.; Poutier, L.; Lafont, S.; Hazane, P. SPOT Histogram data base. Proc. SPIE 1997. [Google Scholar] [CrossRef]
- Moy, J.P.; Hugon, X.; Chabbal, J.; De Cachard, J.; Lenoble, C.; Mollaret, D.; Villard, M.; Villotitch, B. 3000 In Ga As Photodiode Multiplexed Linear Array For The Spot 4 S.W.I.R. Channel. Proc. SPIE 1989. [Google Scholar] [CrossRef]
- Tao, C.V.; Hu, Y.; Jiang, W. Photogrammetric exploitation of IKONOS imagery for mapping applications. Int. J. Remote Sens. 2004, 25, 2833–2853. [Google Scholar] [CrossRef]
- Berthier, E.; Vadon, H.; Baratoux, D.; Arnaud, Y.; Vincent, C.; Feigl, K.L.; Rémy, F.; Legrésy, B. Surface motion of mountain glaciers derived from satellite optical imagery. Remote Sens. Environ. 2005, 95, 14–28. [Google Scholar] [CrossRef]
- Rosu, A.M.; Pierrot-Deseilligny, M.; Delorme, A.; Binet, R.; Klinger, Y. Measurement of ground displacement from optical satellite image correlation using the free open-source software MicMac. ISPRS J. Photogramm. Remote Sens. 2015, 100, 48–59. [Google Scholar] [CrossRef]
- Bicheron, P.; Amberg, V.; Bourg, L.; Petit, D.; Huc, M.; Miras, B.; Brockmann, C.; Hagolle, O.; Delwart, S.; Ranera, F.; Leroy, M.; Arino, O. Geolocation Assessment of MERIS GlobCover Orthorectified Products. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2972–2982. [Google Scholar] [CrossRef] [Green Version]
- Meygret, A. Absolute calibration: From SPOT1 to SPOT5. Proc. SPIE 2005. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Object-based cloud and cloud shadow detection in Landsat imagery. Remote Sens. Environ. 2012, 118, 83–94. [Google Scholar] [CrossRef]
- Holben, B.N.; Eck, T.F.; Slutsker, I.; Tanré, D.; Buis, J.P.; Setzer, A.; Vermote, E.; Reagan, J.A.; Kaufman, Y.J.; Nakajima, T.; et al. AERONET—A federated instrument network and data archive for aerosol characterization. Remote Sens. Environ. 1998, 66, 1–16. [Google Scholar] [CrossRef]
- Santer, R.; Gu, X.F.; Guyot, G.; Deuzé, J.L.; Devaux, C.; Vermote, E.; Verbrugghe, M. SPOT calibration at the La Crau test site (France). Remote Sens. Environ. 1992, 41, 227–237. [Google Scholar] [CrossRef]
- Meygret, A.; Santer, R.P.; Berthelot, B. ROSAS: A robotic station for atmosphere and surface characterization dedicated to on-orbit calibration. Proc. SPIE 2011. [Google Scholar] [CrossRef]
- Roujean, J.L.; Leroy, M.; Deschamps, P.Y. A bidirectional reflectance model of the Earth’s surface for the correction of remote sensing data. J. Geophys. Res.: Atmos. 1992, 97, 20455–20468. [Google Scholar] [CrossRef]
- Claverie, M.; Vermote, E.F.; Franch, B.; Masek, J.G. Evaluation of the Landsat-5 TM and Landsat-7 ETM+ surface reflectance products. Remote Sens. Environ. 2014, in press. [Google Scholar]
- Vermote, E.; Justice, C.O.; Breon, F.M. Towards a generalized approach for correction of the BRDF effect in MODIS directional reflectances. IEEE Trans. Geosci. Remote Sens. 2009, 47, 898–908. [Google Scholar] [CrossRef]
- Le Page, M.; Toumi, J.; Khabba, S.; Hagolle, O.; Tavernier, A.; Kharrou, M.H.; Er-Raki, S.; Huc, M.; Kasbani, M.; Moutamanni, A.E.; et al. A life-size and near real-time test of irrigation scheduling with a Sentinel-2 Like Time Series (SPOT4-Take5) in Morocco. Remote Sens. 2014, 6, 11182–11203. [Google Scholar] [CrossRef]
- Akdim, N.; Alfieri, S.M.; Habib, A.; Choukri, A.; Cheruiyot, E.; Labbassi, K.; Menenti, M. Monitoring of irrigation schemes by remote sensing: Phenology versus retrieval of biophysical variables. Remote Sens. 2014, 6, 5815–5851. [Google Scholar] [CrossRef]
- Miettinen, J.; Stibig, H.J.; Achard, F.; Hagolle, O.; Huc, M. First assessment on the potential of Sentinel-2 data for land area monitoring in Southeast Asian conditions. Asian J. Geoinf. 2015, 15, 23–30. [Google Scholar]
- Benedetti, A.; Morcrette, J.J.; Boucher, O.; Dethof, A.; Engelen, R.J.; Fisher, M.; Flentje, H.; Huneeus, N.; Jones, L.; Kaiser, J.W. Aerosol analysis and forecast in the European Centre for Medium-Range Weather Forecasts Integrated Forecast System: 2. Data assimilation. J. Geophys. Res. 2009, 114, D13205. [Google Scholar] [CrossRef]
- Suarez, M.J.; Rienecker, M.M.; Todling, R.; Bacmeister, J.; Takacs, L.; Liu, H.C.; Gu, W.; Sienkiewicz, M.; Koster, R.D.; Gelaro, R.; et al. The GEOS-5 Data Assimilation System. Documentation of Versions 5.0. 1, 5.1. 0, and 5.2. 0. 2008. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hagolle, O.; Sylvander, S.; Huc, M.; Claverie, M.; Clesse, D.; Dechoz, C.; Lonjou, V.; Poulain, V. SPOT-4 (Take 5): Simulation of Sentinel-2 Time Series on 45 Large Sites. Remote Sens. 2015, 7, 12242-12264. https://doi.org/10.3390/rs70912242
Hagolle O, Sylvander S, Huc M, Claverie M, Clesse D, Dechoz C, Lonjou V, Poulain V. SPOT-4 (Take 5): Simulation of Sentinel-2 Time Series on 45 Large Sites. Remote Sensing. 2015; 7(9):12242-12264. https://doi.org/10.3390/rs70912242
Chicago/Turabian StyleHagolle, Olivier, Sylvia Sylvander, Mireille Huc, Martin Claverie, Dominique Clesse, Cécile Dechoz, Vincent Lonjou, and Vincent Poulain. 2015. "SPOT-4 (Take 5): Simulation of Sentinel-2 Time Series on 45 Large Sites" Remote Sensing 7, no. 9: 12242-12264. https://doi.org/10.3390/rs70912242